
Multi-Objective Optimization Scheduling for Electric Vehicle Charging and Discharging: Peak-Load Shifting Strategy Based on Monte Carlo Sampling


 and
and
Abstract
1. Introduction
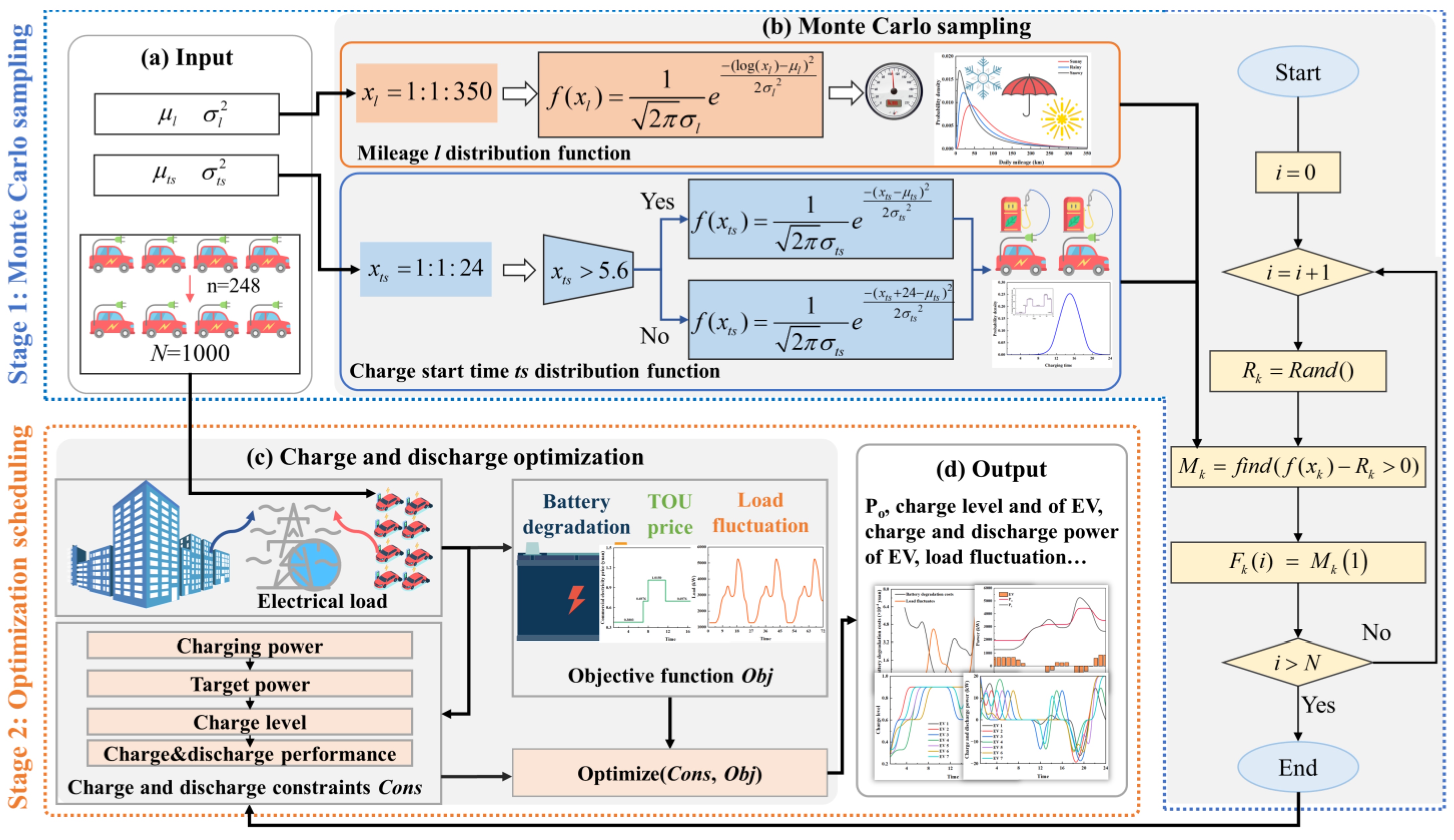
2. Charge and Discharge of EV Scheduling Optimization Model
2.1. Daily Mileage Probability Density Function
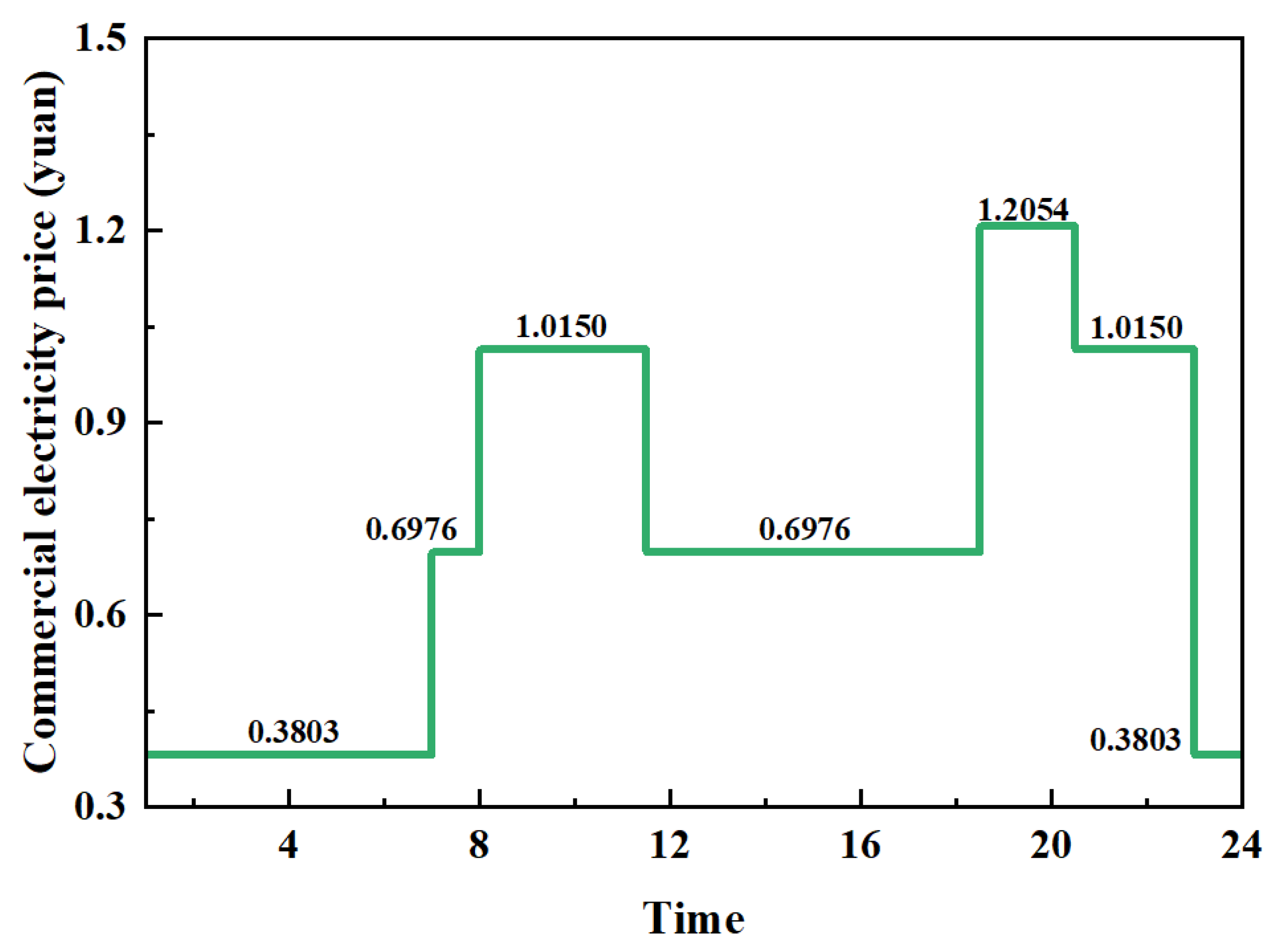
2.2. Initial Charging Time Considering TOU Density Function
2.3. Monte Carlo Sampling EVs Charging Power and Duration
2.4. Charging and Discharging Optimization Model of EV
2.4.1. Constraint Condition
2.4.2. Objective Function
3. Results and Discussion
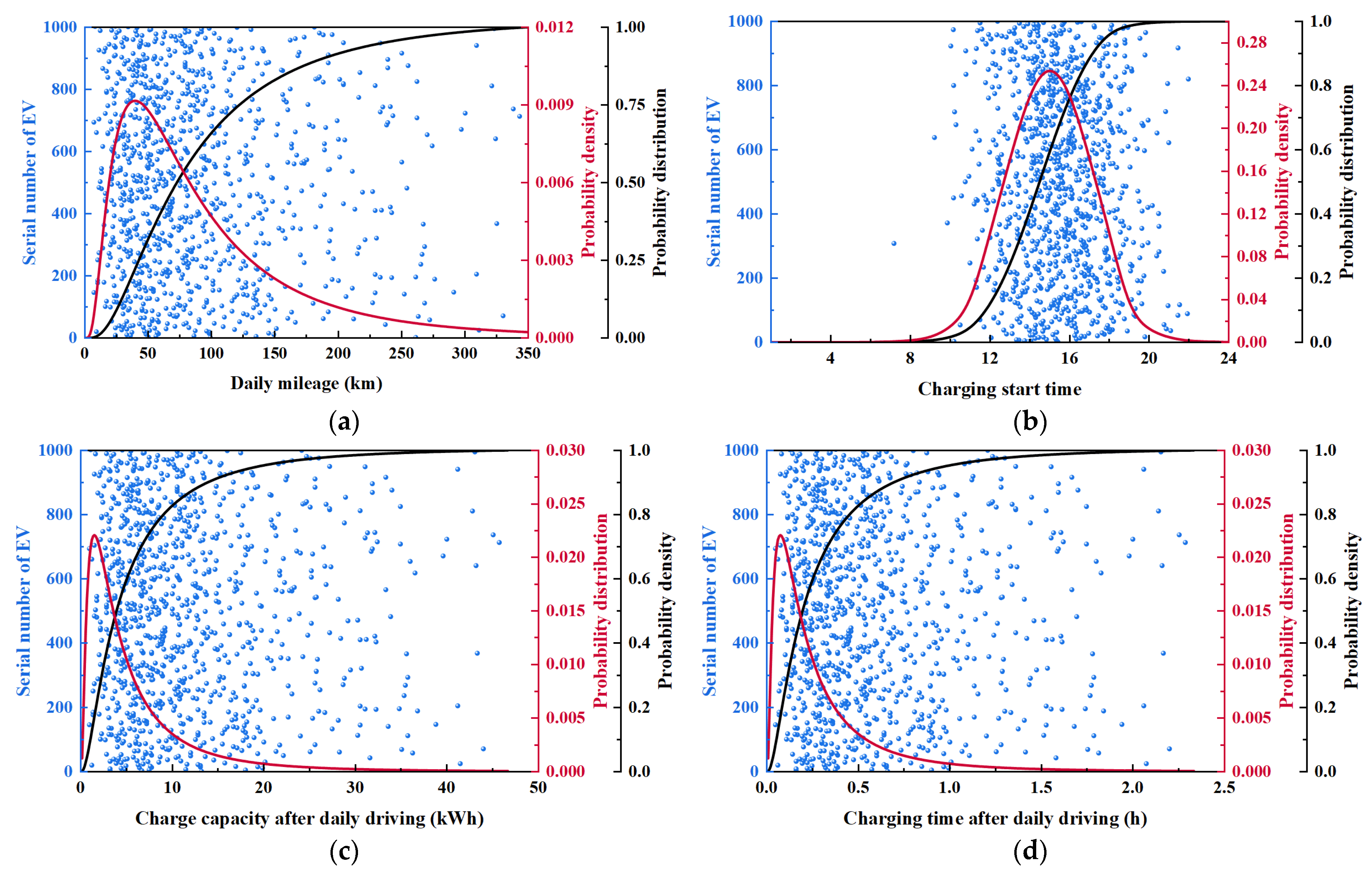
3.1. Monte Carlo EV Cluster Features
3.1.1. Daily Mileage l
3.1.2. Charging Start Time ts
3.1.3. Charge Power Required After Daily Driving
3.1.4. Charge Time Required After Daily Driving
3.2. Electric Vehicle Charge Level
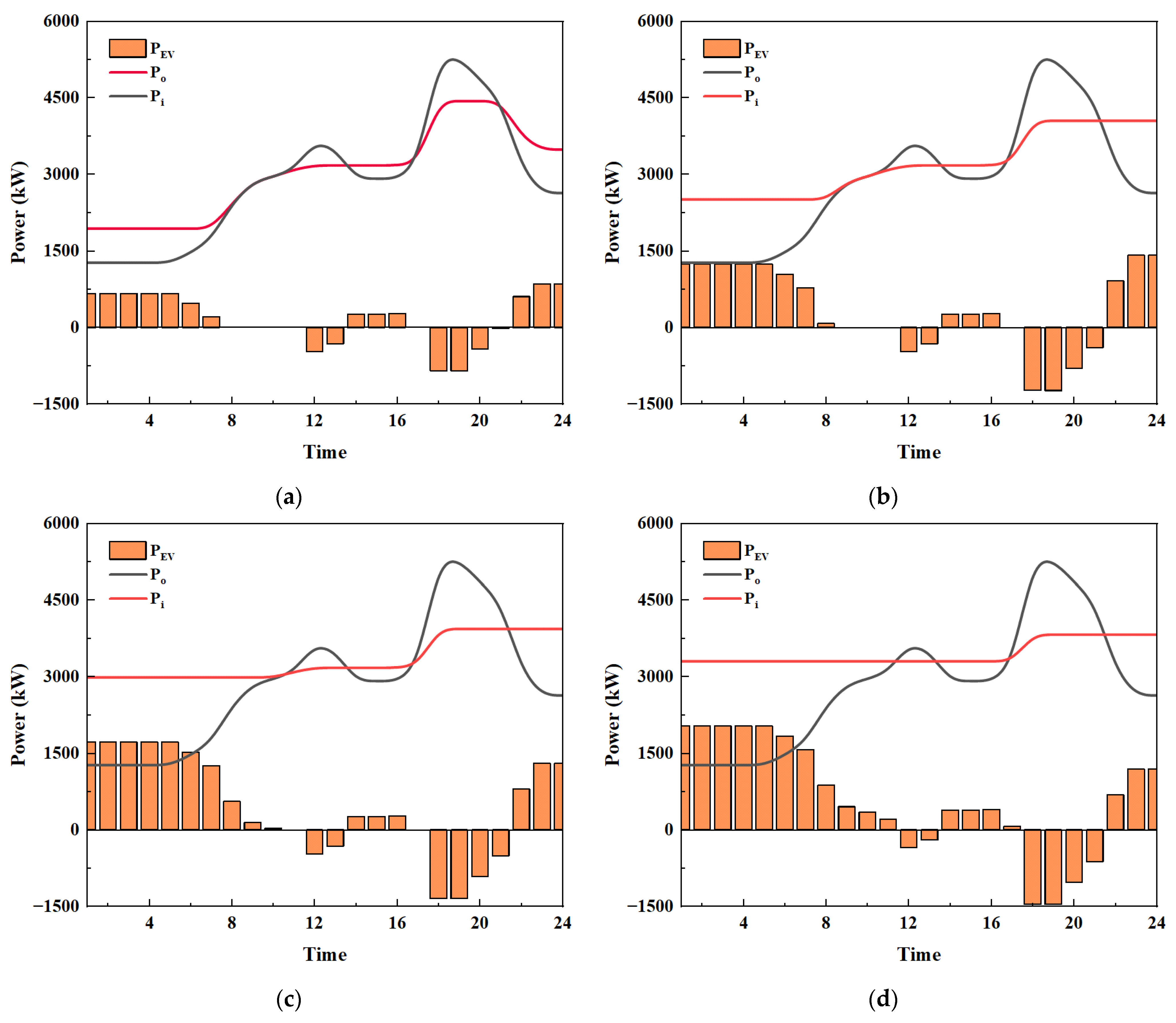
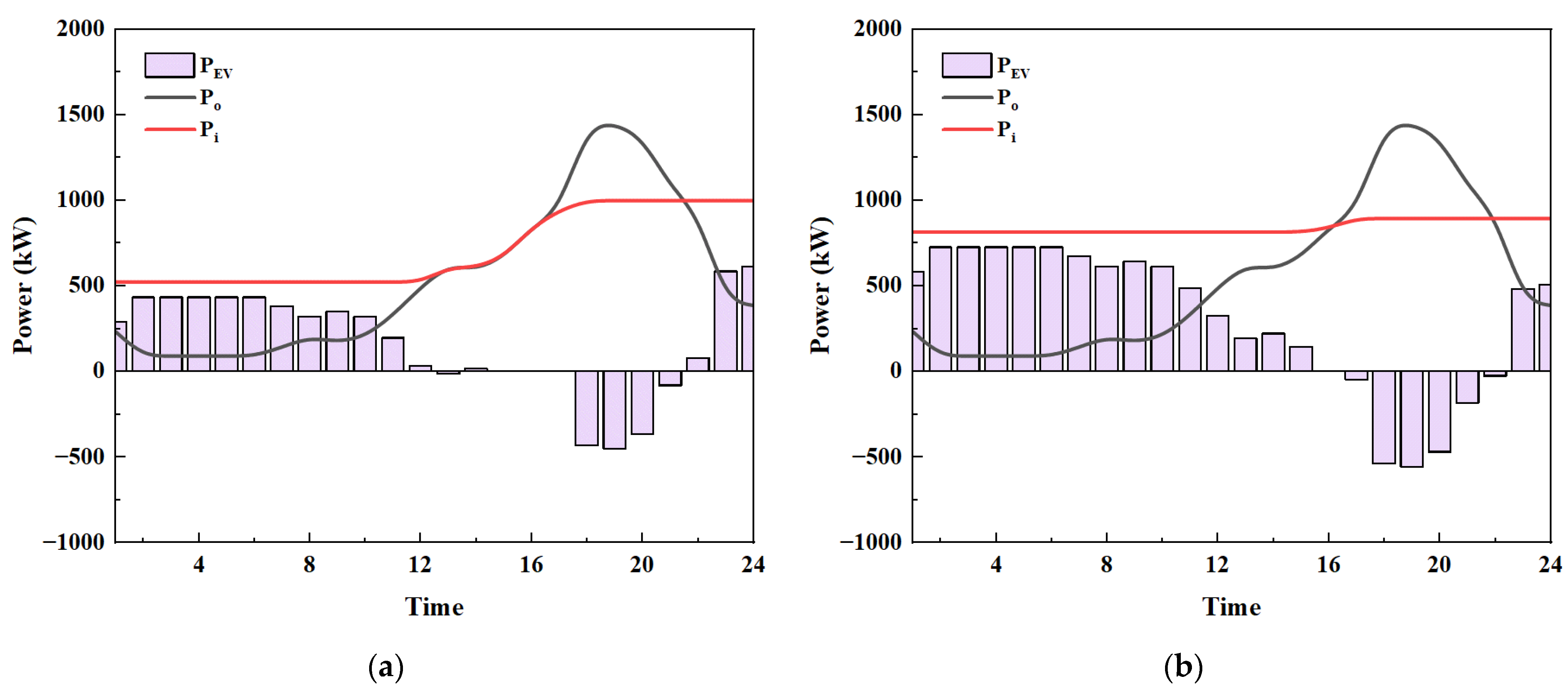
3.3. Charging and Discharging Power of Electric Vehicles
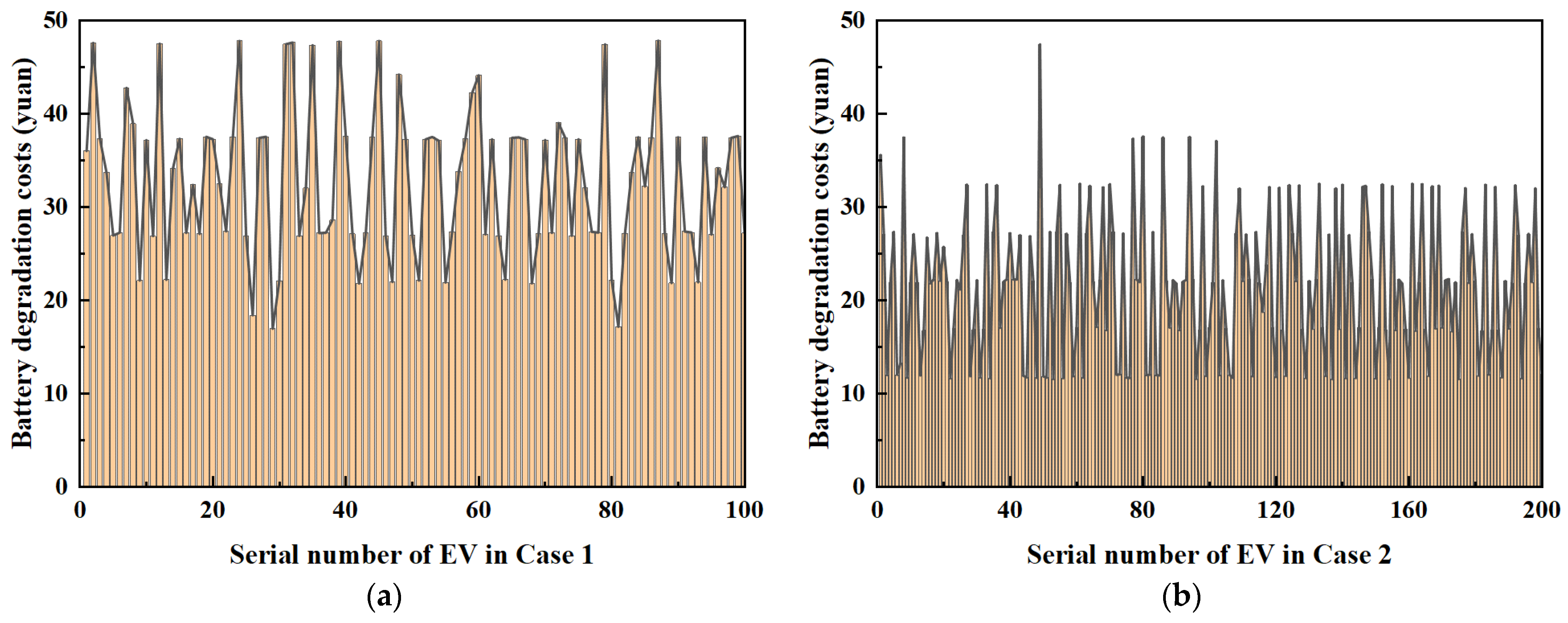
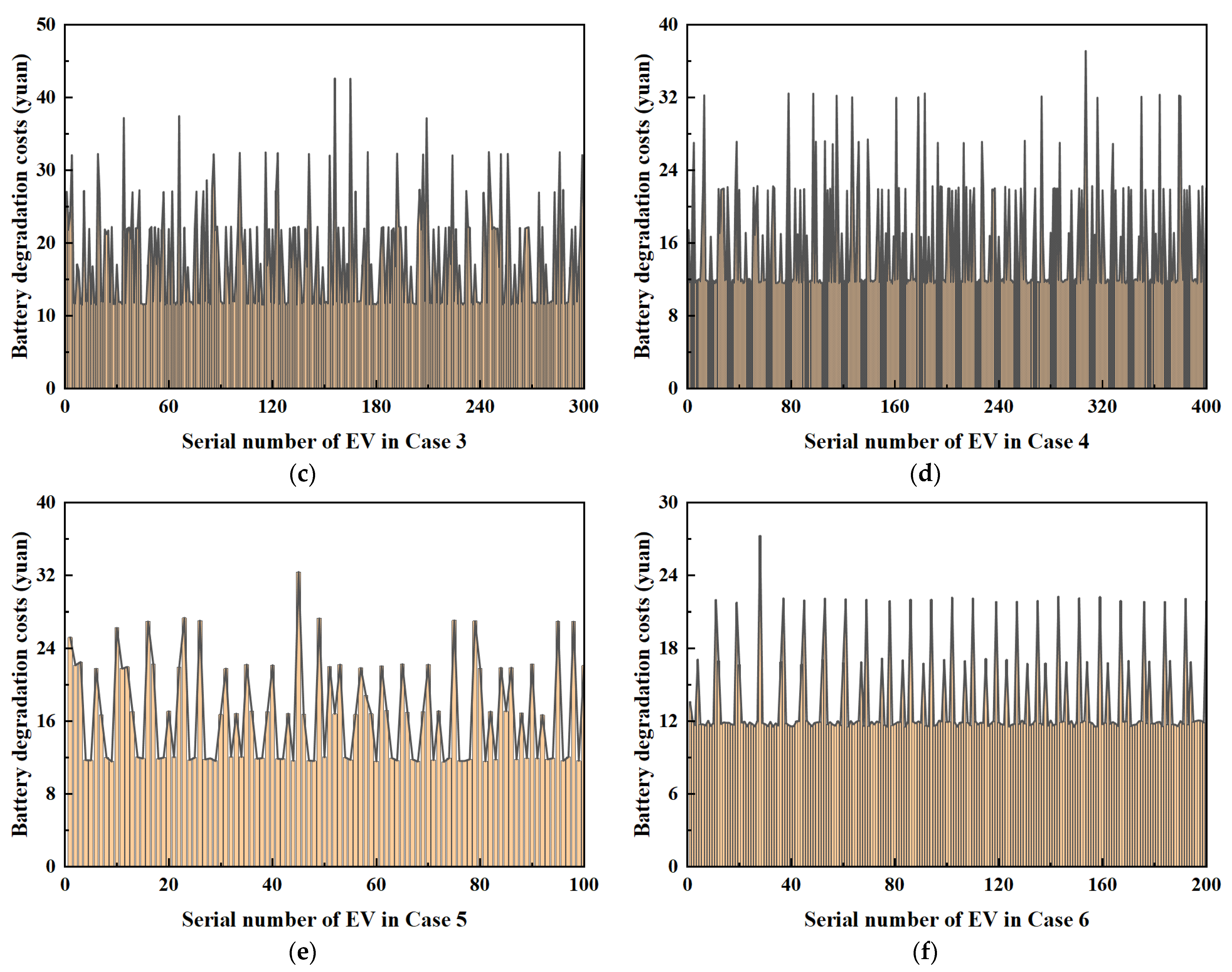
3.4. Battery Loss and Load Fluctuation Costs
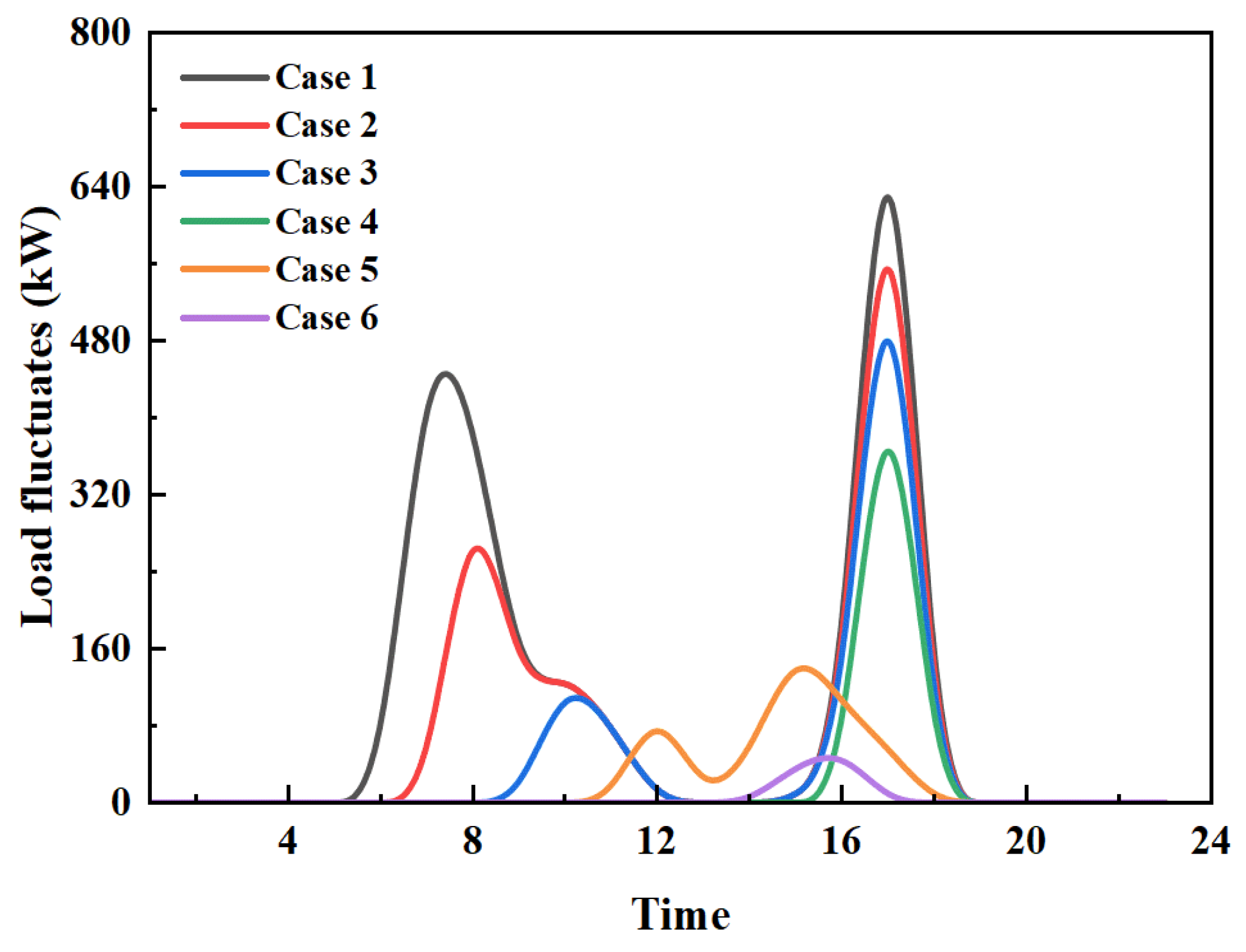
3.5. The Combined Load Power After Dispatching
4. Conclusions
- (1)
- The optimized strategy, achieved through coordinated off-peak charging and peak-hour discharging, resulted in a 27.6% reduction in grid peak load and a 160.1% increase in valley load. Simulations demonstrated strong scalability; as the number of dispatched EVs increased from 100 to 400 units, the peak-valley load difference diminished from 2236 kW to 545 kW, thereby confirming the strategy’s effectiveness for large-scale applications.
- (2)
- The model managed to reduce user charging costs to 7.58 yuan per day while maintaining daily battery degradation costs at 15.68 yuan. A significant negative correlation was identified between battery degradation costs and load fluctuations. Consequently, EV owners in the Innovation Port region are advised to discharge between 6 and 8 p.m.
- (3)
- Comparative case analyses indicate that different EV dispatching methods should be implemented depending on the load profile. For scenarios characterized by double-peak loads (e.g., iHARBOUR campus), EVs should be charged and discharged twice, whereas in scenarios with single-peak loads (e.g., Manlan Hotel), charging and discharging should occur only once.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| EV | Electric vehicle |
| IEA | International Energy Agency |
| GIS | Geographic information system |
| TOU | Time-of-use electricity pricing |
| ifw | Impact factors under various weather |
| Cons | Charging and discharging constraints |
| Obj | Objective function |
| V2G | Vehicle-to-grid |
| fs(x) | Probability density function of daily mileage |
| µs | Mean of the probability density function of daily miles traveled |
| σs2 | Variance of the probability density function of daily miles traveled |
| fE(t) | Probability density function of the charging start time |
| µt | Mean of the probability density function at the start time of charging |
| σt2 | Variance of the probability density function at the start time of charging |
| t | Time |
| le | Mileage per unit power (km·kW−1·h−1) |
| p | Charging power (kW) |
| P | Charging and discharging power of any EV |
| Pmin | Minimum of charging and discharging power |
| Pmax | Maximum of charging and discharging power |
| Pb(i,t) | Battery power of any EV |
| Smin | Minimum charging levels of the battery |
| Smax | Maximum charging levels of the battery |
| Ec | Battery capacity |
| Eo(i,t) | Initial battery level of the EV |
| N(0,2) | Gaussian noise |
| E(i,t) | Battery capacity of the EV at t time |
| η | Charging and discharging efficiency coefficient |
| Ccost | Charging cost |
| P(i,t) | Charging and discharging power of the i EV at time t |
| Cdeg | Degradation loss cost |
| c | Battery degradation coefficient |
| Cc | Degradation loss cost per unit battery capacity |
| Flf | Variation of grid load |
| Po | Base grid load |
| Fpv | Load peak-valley difference |
| max | Maximum values of the power grid load within 24 h |
| min | Minimum values of the power grid load within 24 h |
References
- Yadlapalli, R.T.; Kotapati, A.; Kandipati, R.; Koritala, C.S. A Review on Energy Efficient Technologies for Electric Vehicle Applications. J. Energy Storage 2022, 50, 104212. [Google Scholar] [CrossRef]
- Veerendra, A.S.; Mohamed, M.R.B.; García Márquez, F.P. Energy Management Control Strategies for Energy Storage Systems of Hybrid Electric Vehicle: A Review. Energy Storage 2024, 6, e573. [Google Scholar] [CrossRef]
- Chen, L.; Ma, R. Clean Energy Synergy with Electric Vehicles: Insights into Carbon Footprint. Energy Strategy Rev. 2024, 53, 101394. [Google Scholar] [CrossRef]
- Richardson, D.B. Electric Vehicles and the Electric Grid: A Review of Modeling Approaches, Impacts, and Renewable Energy Integration. Renew. Sustain. Energy Rev. 2013, 19, 247–254. [Google Scholar] [CrossRef]
- Al-Romeedy, B.S. Green Human Resource Management in Egyptian Travel Agencies: Constraints of Implementation and Requirements for Success. J. Hum. Resour. Hosp. Tour. 2019, 18, 529–548. [Google Scholar] [CrossRef]
- Sankhwar, P. Evaluation of Transition to 100% Electric Vehicles (Evs) by 2052 in the United States. Sustain. Energy Res. 2024, 11, 35. [Google Scholar] [CrossRef]
- Liu, H.; Xing, Z.; Zhao, Q.; Liu, Y.; Zhang, P. An Orderly Charging and Discharging Strategy of Electric Vehicles Based on Space–Time Distributed Load Forecasting. Energies 2024, 17, 4284. [Google Scholar] [CrossRef]
- Megha, A.; Mahendran, N.; Elizabeth, R. Analysis of Harmonic Contamination in Electrical Grid Due to Electric Vehicle Charging. In Proceedings of the 2020 Third International Conference on Smart Systems and Inventive Technology (ICSSIT), Tirunelveli, India, 20–22 August 2020; pp. 608–614. [Google Scholar]
- Jain, V.; Kewat, S.; Singh, B. Three Phase Grid Connected Pv Based Ev Charging Station with Capability of Compensation of Reactive Power. IEEE Trans. Ind. Appl. 2022, 59, 367–376. [Google Scholar] [CrossRef]
- Azmi, K.H.M.; Radzi, N.A.M.; Azhar, N.A.; Samidi, F.S.; Zulkifli, I.T.; Zainal, A.M. Active Electric Distribution Network: Applications, Challenges, and Opportunities. IEEE Access 2022, 10, 134655–134689. [Google Scholar] [CrossRef]
- Shahriar, S.; Al-Ali, A.-R.; Osman, A.H.; Dhou, S.; Nijim, M. Machine Learning Approaches for Ev Charging Behavior: A Review. IEEE Access 2020, 8, 168980–168993. [Google Scholar] [CrossRef]
- Lee, J.H.; Chakraborty, D.; Hardman, S.J.; Tal, G. Exploring Electric Vehicle Charging Patterns: Mixed Usage of Charging Infrastructure. Transp. Res. Part D Transp. Environ. 2020, 79, 102249. [Google Scholar] [CrossRef]
- Esteban, B.; Sid-Ahmed, M.; Kar, N.C. A Comparative Study of Power Supply Architectures in Wireless Ev Charging Systems. IEEE Trans. Power Electron. 2015, 30, 6408–6422. [Google Scholar] [CrossRef]
- Franke, T.; Krems, J.F. Understanding Charging Behaviour of Electric Vehicle Users. Transp. Res. Part F Traffic Psychol. Behav. 2013, 21, 75–89. [Google Scholar] [CrossRef]
- Wang, Y.; Yao, E.; Pan, L. Electric Vehicle Drivers’ Charging Behavior Analysis Considering Heterogeneity and Satisfaction. J. Clean. Prod. 2021, 286, 124982. [Google Scholar] [CrossRef]
- Han, X.; Wei, Z.; Hong, Z.; Zhao, S. Ordered Charge Control Considering the Uncertainty of Charging Load of Electric Vehicles Based on Markov Chain. Renew. Energy 2020, 161, 419–434. [Google Scholar] [CrossRef]
- Sørensen, Å.L.; Lindberg, K.B.; Sartori, I.; Andresen, I. Analysis of Residential Ev Energy Flexibility Potential Based on Real-World Charging Reports and Smart Meter Data. Energy Build. 2021, 241, 110923. [Google Scholar] [CrossRef]
- Zhou, Y.; Meng, Q.; Ong, G.P. Electric Bus Charging Scheduling for a Single Public Transport Route Considering Nonlinear Charging Profile and Battery Degradation Effect. Transp. Res. Part B Methodol. 2022, 159, 49–75. [Google Scholar] [CrossRef]
- Gairola, P.; Nezamuddin, N. Optimization Framework for Integrated Battery Electric Bus Planning and Charging Scheduling. Transp. Res. Part D Transp. Environ. 2023, 118, 103697. [Google Scholar] [CrossRef]
- Keawthong, P.; Muangsin, V.; Gowanit, C. Location Selection of Charging Stations for Electric Taxis: A Bangkok Case. Sustainability 2022, 14, 11033. [Google Scholar] [CrossRef]
- Wang, L.; Dubey, A.; Gebremedhin, A.H.; Srivastava, A.K.; Schulz, N. MPC-Based Decentralized Voltage Control in Power Distribution Systems with EV and PV Coordination. IEEE Trans. Smart Grid 2022, 13, 2908–2919. [Google Scholar] [CrossRef]
- Boccella, A.R.; Centobelli, P.; Cerchione, R.; Murino, T.; Riedel, R. Evaluating Centralized and Heterarchical Control of Smart Manufacturing Systems in the Era of Industry 4.0. Appl. Sci. 2020, 10, 755. [Google Scholar] [CrossRef]
- Ma, Z.; Callaway, D.S.; Hiskens, I.A. Decentralized Charging Control of Large Populations of Plug-In Electric Vehicles. IEEE Trans. Control. Syst. Technol. 2011, 21, 67–78. [Google Scholar] [CrossRef]
- Lu, C.; Wu, J.; Wu, C. Privacy-Preserving Decentralized Price Coordination for EV Charging Stations. Electr. Power Syst. Res. 2022, 212, 108355. [Google Scholar] [CrossRef]
- Paudel, A.; Hussain, S.A.; Sadiq, R.; Zareipour, H.; Hewage, K. Decentralized Cooperative Approach for Electric Vehicle Charging. J. Clean. Prod. 2022, 364, 132590. [Google Scholar] [CrossRef]
- Moschella, M.; Murad, M.A.A.; Crisostomi, E.; Milano, F. Decentralized Charging of Plug-In Electric Vehicles and Impact on Transmission System Dynamics. IEEE Trans. Smart Grid 2020, 12, 1772–1781. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Chen, J.; Song, Y.-D. Hierarchical Decentralized Optimization Architecture for Economic Dispatch: A New Approach for Large-Scale Power System. IEEE Trans. Ind. Inform. 2017, 14, 523–534. [Google Scholar] [CrossRef]
- Xu, Z.; Hu, Z.; Song, Y.; Zhao, W.; Zhang, Y. Coordination of PEVs Charging across Multiple Aggregators. Appl. Energy 2014, 136, 582–589. [Google Scholar] [CrossRef]
- Gao, Y.; Wang, C.; Wang, Z.; Liang, H. Research on Time-of-Use Price Applying to Electric Vehicles Charging. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Tianjin, China, 21–24 May 2012; pp. 1–6. [Google Scholar]
- Yang, S.Y.; Woo, J.; Lee, W. Assessing Optimized Time-of-Use Pricing for Electric Vehicle Charging in Deep Vehicle-Grid Integration System. Energy Econ. 2024, 138, 107852. [Google Scholar] [CrossRef]
- Plötz, P.; Jakobsson, N.; Sprei, F. On the Distribution of Individual Daily Driving Distances. Transp. Res. Part B Methodol. 2017, 101, 213–227. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Liu, Y.; Zhang, H.; Lv, G. Daily Electric Vehicle Charging Load Profiles Considering Demographics of Vehicle Users. Appl. Energy 2020, 274, 115063. [Google Scholar] [CrossRef]
- Das, H.S.; Rahman, M.M.; Li, S.; Tan, C.W. Electric Vehicles Standards, Charging Infrastructure, and Impact on Grid Integration: A Technological Review. Renew. Sustain. Energy Rev. 2020, 120, 109618. [Google Scholar] [CrossRef]
- Rubinstein, R.Y.; Kroese, D.P. Simulation and the Monte Carlo Method; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Zhou, K.; Wu, Y.; Wu, X.; Sun, Y.; Teng, D.; Liu, Y. Research and Development Review of Power Converter Topologies and Control Technology for Electric Vehicle Fast-Charging Systems. Electronics 2023, 12, 1581. [Google Scholar] [CrossRef]
- Papamanolis, P.; Krismer, F.; Kolar, J.W. 22 Kw Ev Battery Charger Allowing Full Power Delivery in 3-Phase as Well as L-Phase Operation. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019-ECCE Asia), Busan, Republic of Korea, 27–30 May 2019; pp. 1–8. [Google Scholar]
- Chen, Z.; Shu, X.; Sun, M.; Shen, J.; Xiao, R. Charging Strategy Design of Lithium-Ion Batteries for Energy Loss Minimization Based on Minimum Principle. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017; pp. 1–6. [Google Scholar]
- Helstrom, C.W. The Resolution of Signals in White, Gaussian Noise. Proc. IRE 1955, 43, 1111–1118. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weather | ifw | µs | σs2 |
|---|---|---|---|
| Sunny | 1.0 | 4.32 | 0.6 |
| Rainy | 0.8 | 4.09 | 1.0 |
| Snowy | 0.6 | 3.81 | 1.2 |
| Parameters | Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | Case 6 |
|---|---|---|---|---|---|---|
| Load sours | iHARBOUR campus | iHARBOUR campus | iHARBOUR campus | iHARBOUR campus | Manlan Hotel | Manlan Hotel |
| Number of EV | 100 | 200 | 300 | 400 | 100 | 200 |
| Parameters | Case 1 | Case2 | Case 3 | Case 4 | Case 5 | Case 6 |
|---|---|---|---|---|---|---|
| Total power cost (yuan) | 435.6753 | 1291.1119 | 2346.0935 | 3972.6903 | 1299.2096 | 3032.9731 |
| Max P-V diff (kW) | 2236.9248 | 1569.5937 | 977.7419 | 545.6145 | 486.4014 | 94.4252 |
| Scenario Characteristics | Optimization Strategy |
|---|---|
| Double-peak load scenario | Moderate midday charging + evening peak discharge |
| Single-peak load scenario | Morning charging + nighttime concentrated charging |
| Case | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| Computational time (s) | 75 | 99 | 72 | 94 | 133 | 157 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, J.; Cui, J.; Zhao, Z.; Li, G.; Wang, C.; Lu, Z.; Yang, X.; Liu, Z. Multi-Objective Optimization Scheduling for Electric Vehicle Charging and Discharging: Peak-Load Shifting Strategy Based on Monte Carlo Sampling. Designs 2025, 9, 51. https://doi.org/10.3390/designs9020051
Zheng J, Cui J, Zhao Z, Li G, Wang C, Lu Z, Yang X, Liu Z. Multi-Objective Optimization Scheduling for Electric Vehicle Charging and Discharging: Peak-Load Shifting Strategy Based on Monte Carlo Sampling. Designs. 2025; 9(2):51. https://doi.org/10.3390/designs9020051
Chicago/Turabian StyleZheng, Jian, Jinglan Cui, Zhongmei Zhao, Guocheng Li, Cong Wang, Zeguang Lu, Xiaohu Yang, and Zhengguang Liu. 2025. "Multi-Objective Optimization Scheduling for Electric Vehicle Charging and Discharging: Peak-Load Shifting Strategy Based on Monte Carlo Sampling" Designs 9, no. 2: 51. https://doi.org/10.3390/designs9020051
APA StyleZheng, J., Cui, J., Zhao, Z., Li, G., Wang, C., Lu, Z., Yang, X., & Liu, Z. (2025). Multi-Objective Optimization Scheduling for Electric Vehicle Charging and Discharging: Peak-Load Shifting Strategy Based on Monte Carlo Sampling. Designs, 9(2), 51. https://doi.org/10.3390/designs9020051