

A Simplified Approach to Geometric Non-Linearity in Clamped–Clamped Plates for Energy-Harvesting Applications




Abstract
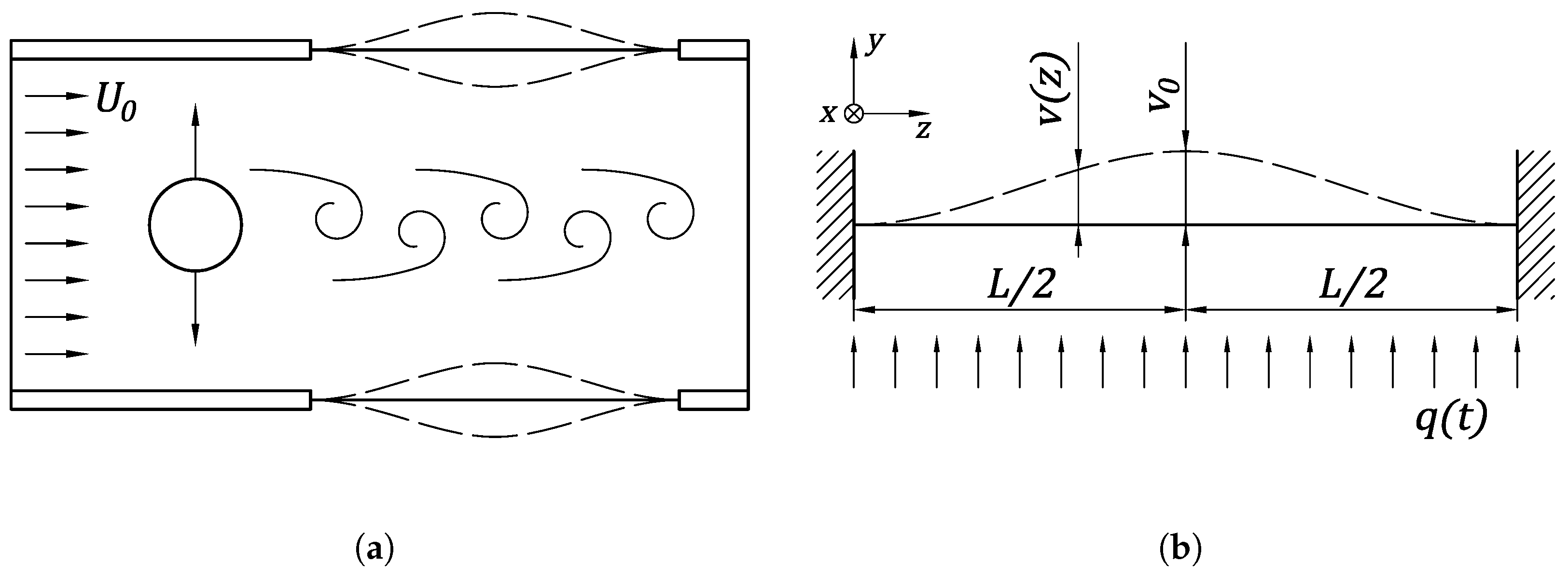
1. Introduction
2. Materials and Methods
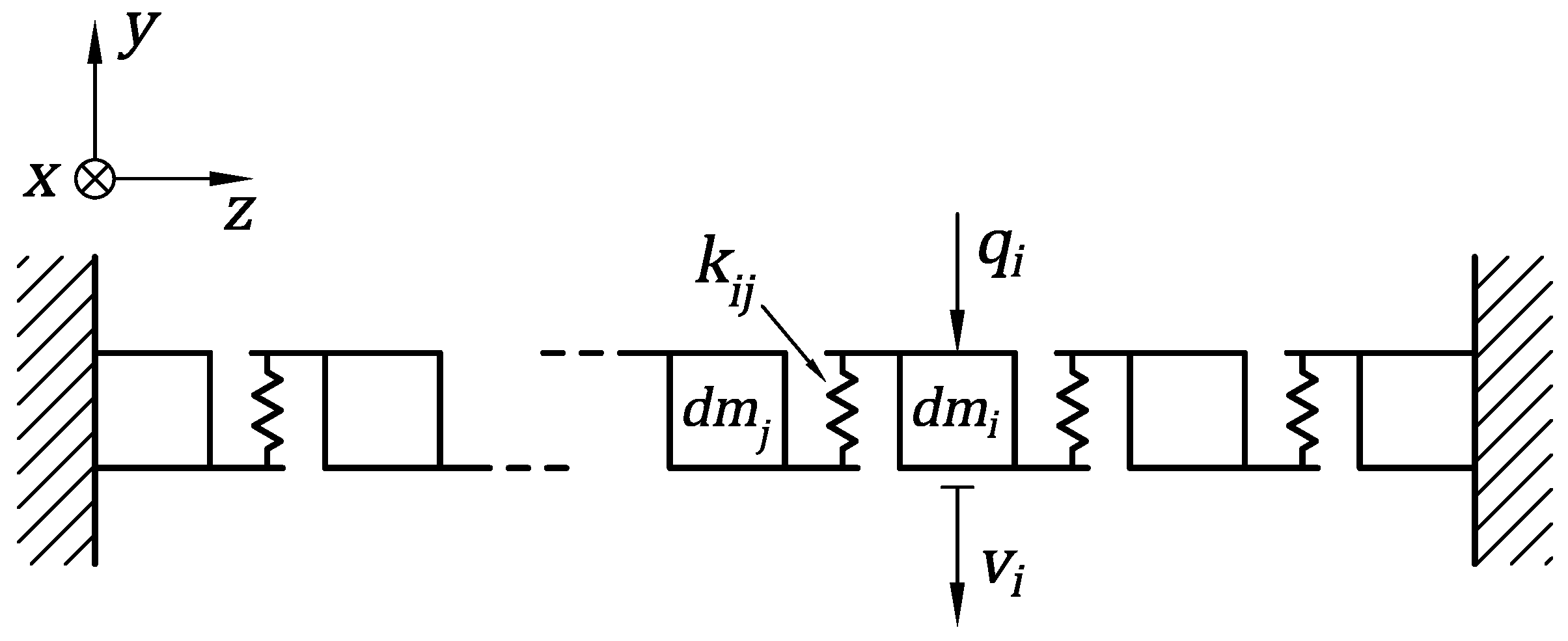
2.1. Elastic Energy Estimation
2.2. Quasi-Static Deformation
2.3. Dynamic Deformation
- The total energy introduced by the load q over a complete cycle, denoted , is balanced by viscous dissipation, .
- The maximum elastic energy, , is equal to the sum of the maximum kinetic energy, , and the work done by external and viscous forces from to , denoted and , respectively.
3. Results and Discussion
3.1. Simulation Refinement Sensitivity
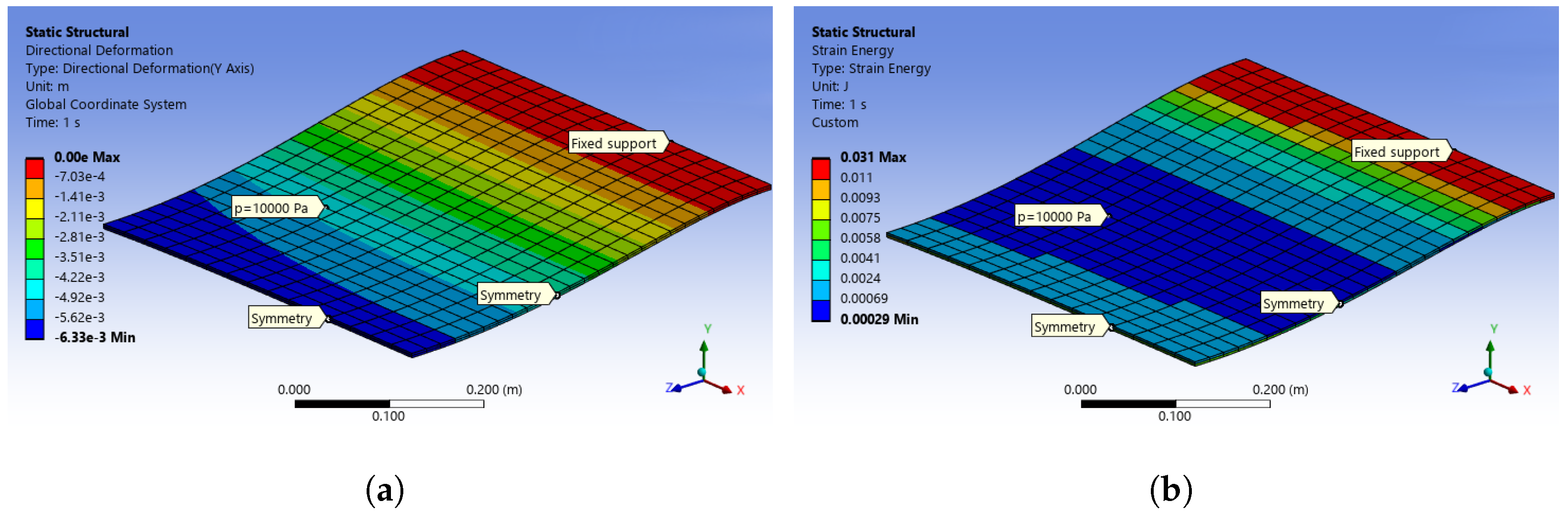
3.2. Accuracy in Static Conditions
3.3. Accuracy in Dynamic Conditions
4. Conclusions
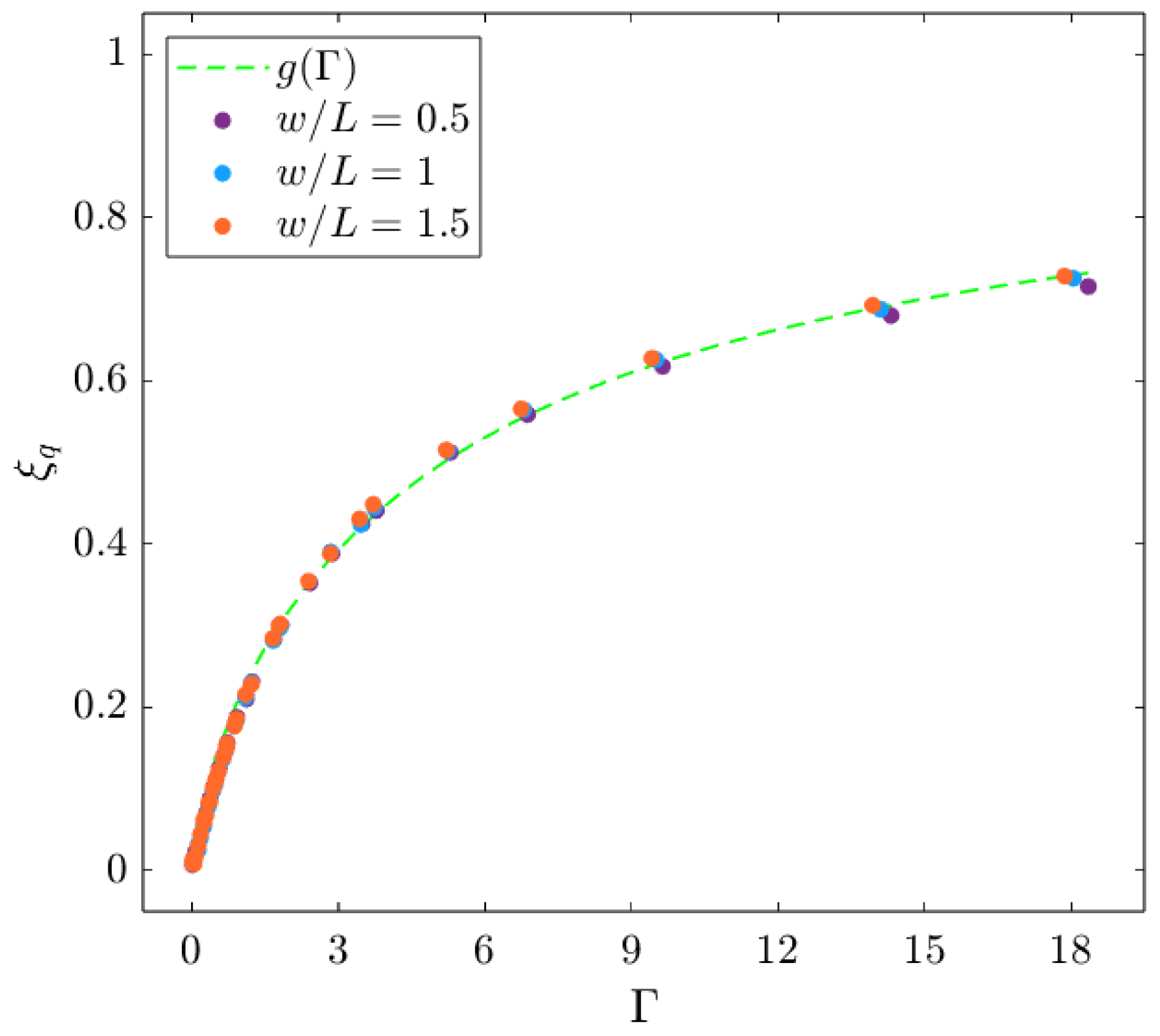
- The variability of the beam’s shape function, under static loading conditions, can be expressed as a function of the parameter , which indicates the ratio between the energies associated with membrane and bending effects.
- Under static loading conditions, the proposed model estimates the characteristic displacement, , and the accumulated elastic energy, , with an error below . This error shows a clear dependence on the non-linearity parameter, , the causes of which have been investigated.
- The estimation of potential elastic energy due to bending and stretching effects is characterized by significant errors. However, adopting an invariant shape function expressed as a fourth-degree polynomial allows us to achieve lower errors for the total elastic energy.
- In the case of a time–harmonic pressure load, the error in estimating the response curve of the plate, , remains below for the examined set of parameters. Once again, the dependence on is evident.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FEM | Finite element method |
| HFEM | Hierarchical finite element method |
| ODE | Ordinary Differential Equation |
| Root Mean Square | |
| VIV | Vortex-Induced Vibration |
| VIVACE | Vortex-Induced Vibration Aquatic Clean Energy |
References
- Feng, C. The Measurement of Vortex Induced Effects in Flow Past Stationary and Oscillating Circular and D-Section Cylinders. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 1968. [Google Scholar] [CrossRef]
- Williamson, C.; Roshko, A. Vortex formation in the wake of an oscillating cylinder. J. Fluids Struct. 1988, 2, 355–381. [Google Scholar] [CrossRef]
- Sarpkaya, T. A critical review of the intrinsic nature of vortex-induced vibrations. J. Fluids Struct. 2004, 19, 389–447. [Google Scholar] [CrossRef]
- Williamson, C.H.; Govardhan, R. Vortex-induced vibrations. Annu. Rev. Fluid Mech. 2004, 36, 413–455. [Google Scholar] [CrossRef]
- American Society of Mechanical Engineers. Eigen-Solution for Flow Induced Oscillations (VIV and Galloping) Revealed at the Fluid-Structure Interface. Volume 2: CFD and FSI. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2019. [Google Scholar] [CrossRef]
- Gabbai, R.; Benaroya, H. An overview of modeling and experiments of vortex-induced vibration of circular cylinders. J. Sound Vib. 2005, 282, 575–616. [Google Scholar] [CrossRef]
- Bernitsas, M.M.; Raghavan, K.; Ben-Simon, Y.; Garcia, E.M.H. VIVACE (Vortex Induced Vibration Aquatic Clean Energy): A New Concept in Generation of Clean and Renewable Energy From Fluid Flow. J. Offshore Mech. Arct. Eng. 2008, 130, 041101. [Google Scholar] [CrossRef]
- Zhang, B.; Mao, Z.; Song, B.; Tian, W.; Ding, W. Numerical investigation on VIV energy harvesting of four cylinders in close staggered formation. Ocean Eng. 2018, 165, 55–68. [Google Scholar] [CrossRef]
- Franzini, G.R.; Bunzel, L.O. A numerical investigation on piezoelectric energy harvesting from Vortex-Induced Vibrations with one and two degrees of freedom. J. Fluids Struct. 2018, 77, 196–212. [Google Scholar] [CrossRef]
- Akaydin, H.D.; Elvin, N.; Andreopoulos, Y. Energy Harvesting from Highly Unsteady Fluid Flows using Piezoelectric Materials. J. Intell. Mater. Syst. Struct. 2010, 21, 1263–1278. [Google Scholar] [CrossRef]
- Weinstein, L.A.; Cacan, M.R.; So, P.M.; Wright, P.K. Vortex shedding induced energy harvesting from piezoelectric materials in heating, ventilation and air conditioning flows. Smart Mater. Struct. 2012, 21, 045003. [Google Scholar] [CrossRef]
- Akaydin, H.; Elvin, N.; Andreopoulos, Y. Wake of a cylinder: A paradigm for energy harvesting with piezoelectric materials. Exp. Fluids 2010, 49, 291–304. [Google Scholar] [CrossRef]
- Hu, Y.; Yang, B.; Chen, X.; Wang, X.; Liu, J. Modeling and experimental study of a piezoelectric energy harvester from vortex shedding-induced vibration. Energy Convers. Manag. 2018, 162, 145–158. [Google Scholar] [CrossRef]
- Li, L.; Xu, P.; Li, Q.; Zheng, R.; Xu, X.; Wu, J.; He, B.; Bao, J.; Tan, D. A coupled LBM-LES-DEM particle flow modeling for microfluidic chip and ultrasonic-based particle aggregation control method. Appl. Math. Model. 2025, 143, 116025. [Google Scholar] [CrossRef]
- Tan, Y.; Ni, Y.; Xu, W.; Xie, Y.; Li, L.; Tan, D. Key technologies and development trends of the soft abrasive flow finishing method. J. Zhejiang Univ. Sci. A 2023, 24, 1043–1064. [Google Scholar] [CrossRef]
- Pandey, A.; Shrestha, S.; Abregu, J.; Nascimben, F.; Chitrakar, S.; Neopane, H.P.; Dahlhaug, O.G. Erosion Induced Flow Changes in Pelton Bucket: A Numerical Approach. IOP Conf. Ser. Earth Environ. Sci. 2024, 1385, 012014. [Google Scholar] [CrossRef]
- Sun, J.; Spinosa, P.; Messa, G.V. Analysis of different strategies for the prediction of hydro-abrasive wear in Pelton turbine buckets based on Computational Fluid Dynamics (CFD) simulations. Wear 2025, 205954. [Google Scholar] [CrossRef]
- Ghuku, S.; Saha, K.N. A review on stress and deformation analysis of curved beams under large deflection. Int. J. Eng. Technol. 2017, 11, 13–39. [Google Scholar] [CrossRef]
- Duffing, G. Erzwungene Schwingungen bei veränderlicher Eigenfrequenz und ihre technische Bedeutung. J. Appl. Math. Mech 1918, 1. [Google Scholar] [CrossRef]
- Hayashi, C. Nonlinear Oscillations in Phisical Systems; Princeton University Press: Princeton, NJ, USA, 1985. [Google Scholar]
- Wilson, J.F. Dynamics of Offshore Structures; Wiley: New York, NY, USA, 1984; pp. 495–519. [Google Scholar]
- Lindfield, G.; Penny, J. Numerical Methods, 4th ed.; Academic Press: New York, NY, USA, 2019; pp. 239–299. [Google Scholar] [CrossRef]
- Ribeiro, P.; Petyt, M. Non-linear vibration of beams with internal resonance by the Hierarchical Finite-Element Method. J. Sound Vib. 1999, 224, 591–624. [Google Scholar] [CrossRef]
- Ribeiro, P. The second harmonic and the validity of Duffing’s equation for vibration of beams with large displacements. Comput. Struct. 2001, 79, 107–117. [Google Scholar] [CrossRef]
- Smith, P.W.J.; Malme, C.I.; Gogos, C.M. Nonlinear Response of a Simple Clamped Panel. J. Acoust. Soc. Am. 1961, 33, 1476–1482. [Google Scholar] [CrossRef]
- Szemplinska-Stupnika, W. The Behaviour of Non-Linear Vibrating Systems; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1990. [Google Scholar]
- Nayfeh, A.H.; Mook, D.T. Nonlinear Oscillations; Wiley: Hoboken, NJ, USA, 1995. [Google Scholar]
- Bennouna, M.; White, R. The effects of large vibration amplitudes on the fundamental mode shape of a clamped-clamped uniform beam. J. Sound Vib. 1984, 96, 309–331. [Google Scholar] [CrossRef]
- Benamar, R.; Bennouna, M.; White, R. The effects of large vibration amplitudes on the mode shapes and natural frequencies of thin elastic structures part I: Simply supported and clamped-clamped beams. J. Sound Vib. 1991, 149, 179–195. [Google Scholar] [CrossRef]
- Azrar, L.; Benamar, R.; White, R. Semi-analytical approach to the non-linear dynamic response problem of S–S and C–C beams at large vibration amplitudes part I: General theory and application to the single mode approach to free and forced vibration analysis. J. Sound Vib. 1999, 224, 183–207. [Google Scholar] [CrossRef]
- Azrar, L.; Benamar, R.; White, R. A semi-analytical approach to the non-linear dynamic response problem of beams at large vibration amplitudes, part II: Multimode approach to the steady state forced periodic response. J. Sound Vib. 2002, 255, 1–41. [Google Scholar] [CrossRef]
- Balachandran, B.; Magrab, E.B. Vibrations; Cambridge University Press: Cambridge, UK, 2018. [Google Scholar]
- Meirovitch, L. Foundamentals of Vibration; McGraw-Hill Education: New York, NY, USA, 2001. [Google Scholar]
- Leissa, A. The historical bases of the Rayleigh and Ritz methods. J. Sound Vib. 2005, 287, 961–978. [Google Scholar] [CrossRef]
- Ritz, W. Über eine neue Methode zur Lösung gewisser Variationsprobleme der mathematischen Physik. J. Fur Reine Angew. Math. 1909, 135, 1–61. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Lower Bound | Upper Bound | Number of Elements |
|---|---|---|---|
| 3 | |||
| 10 | |||
| 5 | 4 |
| Upper Bound Geometry | |||||
|---|---|---|---|---|---|
| Mesh refinement | Number of elements | ||||
| Coarse | 800 | 9.122 | −0.023 | 77.226 | −0.082 |
| Mean | 2622 | 9.126 | 0.012 | 77.310 | 0.026 |
| Fine | 6000 | 9.126 | 0.012 | 77.332 | 0.055 |
| Lower Bound Geometry | |||||
| Mesh refinement | Number of elements | ||||
| Coarse | 800 | 5.931 | −0.024 | 0.1279 | −0.052 |
| Mean | 2622 | 5.933 | 0.008 | 0.1280 | 0.016 |
| Fine | 6000 | 5.933 | 0.015 | 0.1280 | 0.036 |
| Mean Geometry | |||
|---|---|---|---|
| Mesh Refinement | Number of Elements | ||
| Coarse | 800 | 10.213 | −0.022 |
| Mean | 2622 | 10.217 | 0.010 |
| Fine | 6000 | 10.217 | 0.012 |
| Mean Geometry | |||
|---|---|---|---|
| Time-Step Refinement | Number of Samplings | ||
| Coarse | 14 | 10.243 | 0.102 |
| Mean | 20 | 10.213 | −0.192 |
| Fine | 40 | 10.242 | 0.09 |
| 0.429 | 0.300 | ||||||
| 17.864 | 5.123 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fiorini, A.; De Vanna, F.; Carraro, M.; Regazzo, S.; Cavazzini, G. A Simplified Approach to Geometric Non-Linearity in Clamped–Clamped Plates for Energy-Harvesting Applications. Designs 2025, 9, 49. https://doi.org/10.3390/designs9020049
Fiorini A, De Vanna F, Carraro M, Regazzo S, Cavazzini G. A Simplified Approach to Geometric Non-Linearity in Clamped–Clamped Plates for Energy-Harvesting Applications. Designs. 2025; 9(2):49. https://doi.org/10.3390/designs9020049
Chicago/Turabian StyleFiorini, Alessandro, Francesco De Vanna, Marco Carraro, Stefano Regazzo, and Giovanna Cavazzini. 2025. "A Simplified Approach to Geometric Non-Linearity in Clamped–Clamped Plates for Energy-Harvesting Applications" Designs 9, no. 2: 49. https://doi.org/10.3390/designs9020049
APA StyleFiorini, A., De Vanna, F., Carraro, M., Regazzo, S., & Cavazzini, G. (2025). A Simplified Approach to Geometric Non-Linearity in Clamped–Clamped Plates for Energy-Harvesting Applications. Designs, 9(2), 49. https://doi.org/10.3390/designs9020049