SeismoStruct 2024 [
12,
13,
14] was employed for the structural modeling and analysis of the building. The model exclusively includes the bare steel frames, meaning the contribution of the slab as a composite beam is intentionally omitted to focus on the steel frame behavior [
18,
19,
20,
21,
22]. To represent the material behavior, a bilinear stress–strain model with kinematic strain hardening is adopted, ensuring accurate simulation of inelastic responses under seismic loads. The structural elements are modeled using an inelastic force-based plastic hinge frame element type (infrmFBPH) [
23,
24], with each section represented by 150 fibers to provide a detailed cross-sectional response. These plastic hinges exhibit bilinear hysteretic behavior, characterized by a curvature strain-hardening ratio of 0.02, and their length is specified as 1/6 of the respective member’s span, ensuring a realistic representation of plasticity. The plastic resistance at the hinges is derived from an expected yield strength of 290 MPa, reflecting material properties typical of ductile steel. Additionally, rigid-end offsets are included at the ends of frame members to account for the actual physical dimensions and stiffness of joints. The dynamic behavior of the structure is further refined by incorporating Rayleigh damping at a 3% critical damping ratio, calibrated using the first two elastic vibration modes. The time-step increment for the time-history dynamic analysis is set at 0.005 s, ensuring precise temporal resolution for capturing seismic responses. The failure criterion applied to all steel beams and columns is defined by a plastic hinge rotation limit of 0.03 radians, consistent with the AISC design provisions [
25] introduced following the 1994 Northridge earthquake [
26,
27]. This limit reflects the ductility demands expected in moment-resisting steel frames under severe seismic loading. To address the potential for brittle failure at welded beam-to-column connections, the model incorporates flexural strength degradation at the ends of beams and columns. This degradation simulates the reduction in strength to 1% of the yield moment upon reaching the ultimate curvature, accurately capturing the behavior of connections as they transition from ductile to brittle failure modes. This approach provides a comprehensive framework for evaluating the seismic performance of the structure, considering both global and local failure mechanisms.
Experimental investigations have consistently highlighted the substantial influence of biaxial effects on the force–displacement behavior of isolators. These biaxial effects arise from the simultaneous application of forces in two perpendicular directions, a scenario commonly encountered during seismic events when structures are subjected to complex, multi-directional ground motions. Accurate modeling of these interactions is essential for capturing the realistic behavior of isolators under such conditions. In this study, the interaction between in-plane forces acting along the and directions is explicitly considered to ensure that the isolators’ responses under biaxial loading are properly characterized.
5.2. Analysis Results and Comparisons
Using the SeismoStruct 2024 software [
12,
13,
14], a comprehensive set of 40 nonlinear time-history analyses was performed—20 for the structures isolated with LRBs and 20 for those using CSSs. These analyses utilized the models and ground motion records previously described, ensuring consistency with the selected parameters and input conditions. For each analysis, the maximum displacement of the center of rigidity was extracted along both the
and
directions. The maximum displacements were then averaged across the 20 analyses for both the LRB and CSS isolation systems, providing insight into the relative performance of each system. The resulting average displacements are summarized in
Table 12, highlighting the effectiveness of each isolator type in controlling seismic displacements.
To evaluate the lateral forces acting on each floor and determine the base shear, the nodal accelerations at every floor were extracted for every time step of the analysis. The lateral force at each node was calculated by multiplying the nodal acceleration by the corresponding mass. These nodal forces were summed for each floor to determine the total lateral force at each time step. From these data, the maximum lateral forces experienced by each floor during the analyses were identified, and the average maximum lateral forces were computed across all 20 ground motions for both LRB and CSS systems. The results are presented in
Table 13, which provides a detailed comparison of the lateral force distribution across the height of the structure.
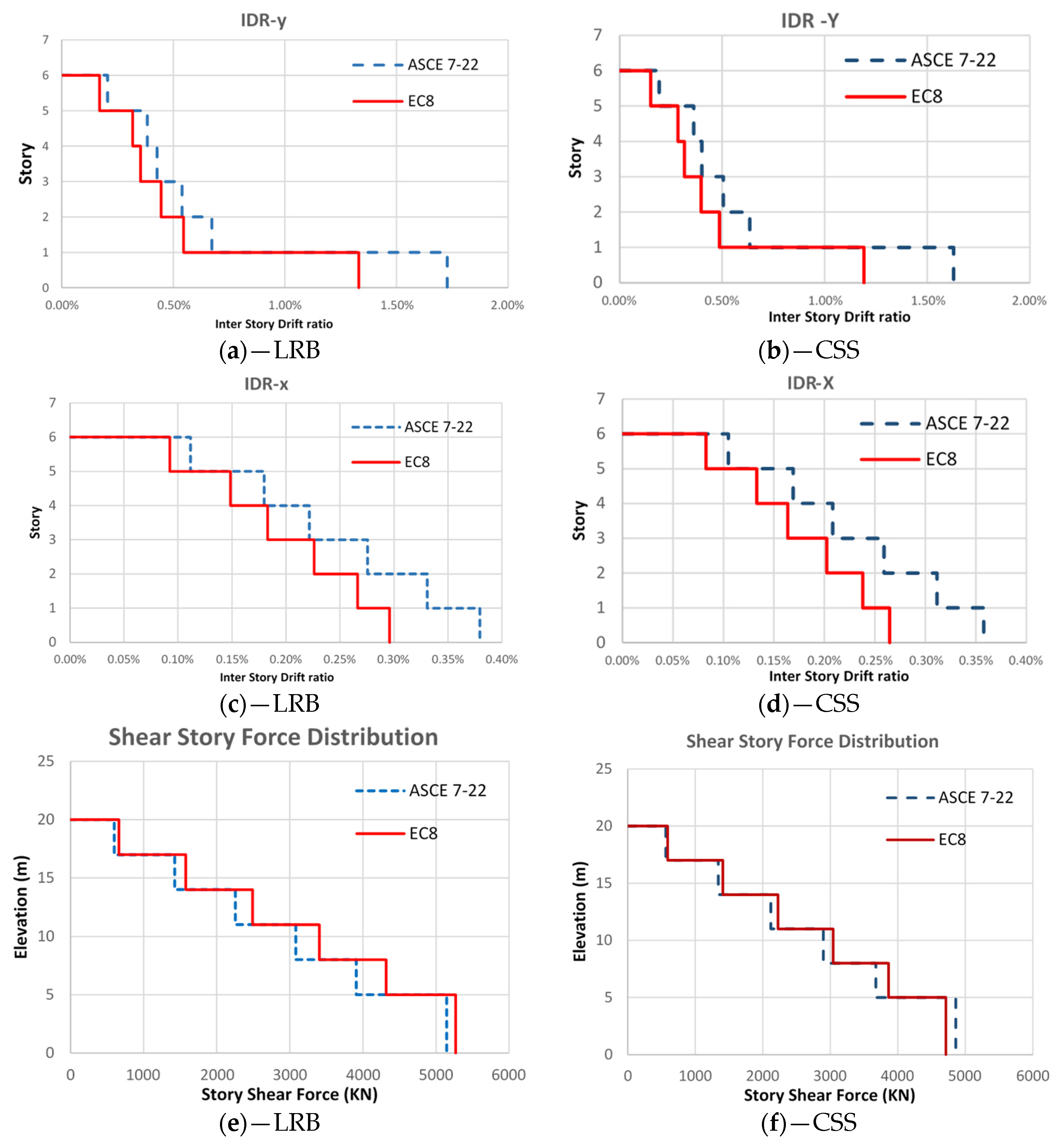
For the IDR, the displacement of the center of rigidity at each floor was extracted in both the
and
directions for every time step. The IDR for each floor was calculated at every time step as the ratio of the relative displacement between adjacent floors to the story height. For each ground motion record, the maximum IDR was identified for every floor. Subsequently, the average maximum IDR was computed across all 20 ground motions for both LRB and CSS isolation systems. These results are summarized in
Table 14, providing a clear comparison of the deformation behavior of the two isolator types.
This rigorous analysis framework allows for a detailed evaluation of the seismic performance of the isolated structures, comparing key metrics such as displacement, lateral force, base shear, and interstory drift ratio. The selection of displacement, lateral force, base shear, and interstory drift ratio as primary evaluation metrics is justified by their direct impact on the design and performance assessment of seismically isolated structures. These metrics comprehensively capture both the isolator behavior (displacement and base shear) and the superstructure response (lateral force and IDR). By comparing these parameters across ASCE 7-22, EC8, and NTHA, this study provides a holistic evaluation of the reliability, accuracy, and conservatism of the simplified linear methods relative to a more advanced nonlinear approach. The results serve as a basis for assessing the relative effectiveness of the LRB and CSS systems in reducing seismic demands and enhancing structural resilience.
Table 15 and
Table 16 compare the predictions of the American code (ASCE 7-22), the European code (EC8), and NTHA for buildings using LRBs and CSSs, respectively. The comparison focuses on two primary parameters: the maximum displacement at the center of rigidity of the isolation system and the actual lateral seismic force above the base level, calculated without reductions from
-factors or
-factors. The percentage differences reported in
Table 15 and
Table 16 are relative to the nonlinear time history analysis (NTHA) results, serving as a reference for comparison. These differences were calculated as the ratio of the deviation from NTHA to the NTHA value itself, ensuring a clear assessment of whether ASCE 7-22 and EC8 overestimate or underestimate key seismic response parameters.
For buildings equipped with lead–rubber bearings, the American code (ASCE 7-22) significantly overestimates the maximum displacement when compared to NTHA results, with deviations reaching up to 58% in the -direction and 52% in the -direction. In contrast, the European code (EC8) provides displacement estimates that are closer to the actual values, differing by only 14% in the -direction and 9% in the -direction. Similarly, the lateral seismic forces predicted by ASCE 7-22 are considerably higher than those derived from NTHA, with differences of up to 89% in the -direction and 45% in the -direction. The European code, while still overestimating the forces, performs better, with differences of 45% in the -direction and 11% in the -direction.
These findings indicate that the European code aligns more closely with the actual behavior of the structure as determined by NTHA, particularly for both displacements and lateral forces. However, it still demonstrates some degree of conservatism. In contrast, the American code exhibits a much higher level of conservatism, particularly for displacement and force estimates, which may lead to over-designed and unnecessarily costly structures.
For structures employing CSSs, as shown in
Table 16, both the American code (ASCE 7-22) and the European code (EC8) overestimate the maximum displacement by a considerable margin, with ASCE demonstrating much higher deviations. Specifically, ASCE overestimates the displacement by 241% in the
-direction and 210% in the
-direction, while EC8 overestimates by 128% in the
-direction and 107% in the
-direction. Similarly, for lateral seismic forces, ASCE continues to show significant overestimation, with deviations of 53% in the
-direction and 70% in the
-direction. In contrast, EC8 presents more moderate overestimations for lateral forces, with deviations of 12% in the
-direction and 24% in the
-direction. These findings highlight that, although both codes adopt conservative approaches, ASCE consistently yields higher and more conservative values, particularly for displacement estimates, which may lead to excessively robust and costly designs. EC8, while still conservative, provides results that are comparatively closer to actual performance as derived from NTHA.
These findings emphasize the practicality of applying the simplified method outlined in EC8 for LRB systems, as its predictions align more closely with actual performance. Alternatively, ASCE 7-22, while yielding more conservative results, prioritizes safety and can also be utilized effectively for LRB systems. However, for CSSs, the simplified method is less suitable due to the significant discrepancies it produces when compared to actual performance. In such cases, more precise methodologies, such as NTHA, should be employed for the final design to ensure accuracy and reliability. This conclusion is consistent with provisions in the European code, specifically Section 10.9.2. (1) of EC8. The code explicitly allows the use of equivalent linear models for isolation systems incorporating laminated elastomeric bearings, where the behavior can be adequately captured through linear assumptions. However, for elasto-plastic devices, such as friction-based systems, EC8 mandates the application of a bilinear hysteretic model to accurately represent the nonlinear behavior of these isolators. As a result, simplified linear analysis methods are not applicable for such systems, reinforcing the necessity of nonlinear time-history analysis to achieve a reliable and accurate design.
Table 17 and
Table 18 present a comparative analysis of the story shear forces calculated using three methods, EC8, ASCE 7-22, and NTHA, for structures employing LRBs and CSSs, respectively. For the LRB system, EC8 exhibits relative differences compared to NTHA. In the
-direction, which represents the stiffer direction of the structure, the differences range from −4% to 22%, indicating a relatively close match with NTHA in many cases. In the
-direction, which is less stiff, EC8 results show increases of up to 59% compared to NTHA. On the other hand, ASCE 7-22 consistently predicts higher story shear forces than NTHA, with increases reaching up to 95% in the
-direction and as high as 160% in the
-direction. These findings highlight the more conservative nature of ASCE, especially in the less stiff direction. For CSSs, EC8 also shows differences from NTHA. In the
-direction, the differences range from −14% to 27%, while in the
-direction, the values vary from −4% to 37%, demonstrating a wider variability compared to the LRB case. ASCE 7-22 again yields higher values, with the most significant increase being 135%, reflecting its consistently conservative approach for shear force predictions across both directions.
These results underscore the variability in performance predictions among the methods. While EC8 aligns more closely with NTHA in many cases, ASCE 7-22 consistently provides more conservative estimates, particularly for shear forces, which may lead to over-design in some scenarios.
Regarding the IDR, as presented in
Table 19 and
Table 20, both ASCE 7-22 and EC8 consistently overestimate the IDR across all stories for structures equipped with LRBs. However, EC8 provides results that are closer to the NTHA values compared to ASCE. Notably, for the first story, both standards underestimate the IDR, with EC8 showing a deviation of up to −31% and ASCE underestimating by −11%. This indicates that while EC8 generally aligns better with NTHA, it significantly underestimates first-story deformations for LRB systems. For structures with CSSs, EC8 also underestimates the IDR for the first story, demonstrating a recurring limitation of both codes in accurately predicting first-story drift for isolator types. These findings suggest that while both standards adopt conservative approaches for upper-story IDRs, they may require additional considerations or adjustments to better capture the behavior of the first story, particularly for CSS systems.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}