1. Introduction
The guiding question of this paper is “how to combine in a single mechanical transmission as extended a kinematic means as possible, with as high a load-bearing capacity and as small an energy loss as possible?”.
The modern requirements for mechanical gears consist, in particular, of increasing the reliability, efficiency, and bearing capacity and reducing the mass and the dimensions of transmissions. Satisfying the ever-increasing demands via partially modernizing classic transmissions is becoming increasingly difficult. This problem can be efficiently solved using two methods simultaneously applied, namely, by developing new types of mechanical transmissions based on new principles of transformation and transmission of movement and load by developing gearings with multipair tooth contact.
In the great diversity of mechanical transmissions, planetary transmissions with multipair gears occupy a special place. They have a series of advantages, namely, a high bearing capacity, coaxiality, compactness, reduced mass, high kinematic precision, the possibility of obtaining great transmission ratios, silent operation, etc. Planetary transmissions with multiple-pair gears have become widespread in different fields of machine building in recent decades and have witnessed continuously growing modernization.
Thus, in 1932, the German engineer Braren L. K. invented cycloidal transmission, CYCLO, (with priority from 30 November 1928), which is characterized by a high load-bearing capacity due to the multiplicity of the simultaneous gearing of a large number of pairs of teeth, high mechanical efficiency due to the use of high-quality tooth–roller kinematic couplings, high transmission ratios of up to i = 119 in one stage, small dimensions, compactness, etc. [
1].
Cycloidal reducers with bolts of general or special purpose, in a wide range of transmission ratios, are produced in series by several industrial enterprises, among which Braren Lorenz CYCLO Getrebau (i = 7–71, T = 10–680 Nm, Tmax = 70–2000 Nm, G = 104–3 × 105 Nm/rad, and η = 0.94), Sumitomo Heavy Industries (i = 59, 87, 119; P = 0.26–7.16 kW; T = 111–5430 Nm; and η = 0.84), Wellman Bibby (i = 11–87 in one stage; i < 7569 in two stages; and i < 658,303 in three stages; P = 0.61–160 kW), Nidec-Shimpo (Kyoto, Japan) produce CYCLO reducers with cycloidal, epicycloidal, and circle arc profiles.
The cycloidal reducers with one stage and two cycloidal satellite wheels produced in a very wide range by Sumitomo Drive Technologies ensure transmission ratios in the intervals of 6–119 (in one stage) and 104–7569 (in two stages). These transmissions continue to be researched and developed [
2,
3,
4,
5].
The disadvantages of CYCLO transmissions consist in the need to follow the high precision of execution of the teeth with bolts and the mechanism of transmitting the rotational movement from the satellite to the driven shaft. At the same time, the wear of the gear elements (bolts, axles, and the cycloidal profile) leads to an increase in the unevenness of load distribution between the bolts [
6].
A new principle of transformation and transmission of movement and load has been proposed in mechanisms named harmonic transmissions, patented by the American engineer Musser C. W. [
7] in 1959 (with priority from 21 March 1955). A harmonic transmission is a mechanical transmission with multiple pairs of internal gears for two wheels, with a difference in the number of teeth, ±1, 2, 3, and 4, where one of the wheels (usually the interior one) is flexible and continuously subjected to deformations [
8,
9].
In 1963, the American company Harmonic Drive LLC produced a harmonic transmission for the helicopter industry for the first time on an industrial scale [
10].
Depending on the shape of the wave generator (2, 3, or 4 deformation rollers), the multiplicity of gearing extends up to 25–30% of the number of tooth pairs.
Due to the special kinematics in the interaction between the flexible wheel and the central wheel, a considerable transmission ratio is ensured: 80–300 (in one stage) and up to 100,000 (in two stages).
Harmonic transmissions are compact, have a high load-bearing capacity, provide high kinematic accuracy, and provide the possibility of transmitting motion in tight environments, one of the basic advantages of harmonic transmissions.
A disadvantage of harmonic transmissions is the low reliability, limited by the fatigue resistance of the flexible wheel material and a reduced capacity to operate at high speeds. The mentioned disadvantages of harmonic transmissions with deformable wheels are completely eliminated in harmonic transmissions with intermediate rolling bodies (HTIRBs) [
11].
The main advantage of HTIRBs compared to harmonic transmissions with deformable wheels is the increased reliability due to the exclusion of the deformable wheel from the construction.
The high bearing capacity of HTIRBs is due to the multiplicity of the 100% absolute gearing of the rolling bodies with the profile of the toothed crown.
World leaders in HTIRB research design and technological development are the companies Synkinetics, Advanced Energy Concepts, and Compudrive. Important technical solutions for developing HTIRBs are protected by patents in the UK, Denmark, and Japan, which are recommended for special-purpose and less general-purpose technology.
An important stage in the development of mechanical transmissions with fixed axles of conjugate wheels was the invention of the helical gear, which was protected by a US patent [
12] in 1926 (priority 2 November 1923) by Ernest Wildhaber. The technical solutions proposed by the author refer to creating a gear with circular arc profiles with convex–concave punctiform tooth contact with the origins of the displaced circular arcs, and the difference in the curvatures of the flank profiles is minimal [
13,
14]. At the same time, the author proposed generation technologies, the geometry of the rack, the profiled disc, and the notched cutter. Thus, E. Wildhaber laid the foundations of the geometry and technology of generating a helical gear with the profiles of the tooth flanks in a circle arc with punctiform contact and subsequently developed the fundamental theoretical basis of the respective gear [
15,
16,
17].
Currently, the fundamental characteristics of mechanical transmissions can be increased in two directions: the first based on the use of transmissions with multipair gearings and the second based on the use of gears with convex–concave geometries.
The first direction refers to CYCLO, harmonic, HTIRB, and multipair precessional transmissions.
The second direction refers to Wildhaber transmissions (Wildhaber–Novicov) and precessional transmissions with convex–concave contact, with a small difference in the flank curves of the teeth [
18,
19,
20,
21].
Precessional transmissions with spherospatial movement with a fixed point can simultaneously increase functional characteristics via the multipair conjugation of the pairs of teeth and by ensuring a convex–concave geometry with a small difference in the flank curves.
The ever-increasing requirements for the complex performance attributed to mechanical transmissions often exceed the possibilities offered by these development directions. These requirements can be satisfied by technical solutions, which ensure both the modernization of the geometry of the tooth contact as a form and the multipair tooth contact as a functioning process.
This direction of development combines, in a single transmission, both the convex–concave contact geometry of the teeth with a small difference in curvatures and the gearing of the teeth in multipair contacts.
The main objective of this work consists in increasing the functional characteristics of transmissions by modernizing the gearing of the teeth in two directions: the first by ensuring the multipair conjugation of the pairs of teeth and the second by simultaneously ensuring convex–concave contact of the tooth profiles with a small difference in the curves of the flank.
Currently, there is no full technological unification of notions and definitions in the field of transmissions with the spherospatial interaction of teeth in gears. In some countries, at the national level, notions and definitions are based on constructive aspects; in others, they are based on the functional principles of transmissions, a fact that does not ensure a full terminological unification [
22,
23,
24,
25].
Mechanical transmissions with spherospatial interaction of the teeth, although they have the same kinematic structure and perform the same relative movements of the gears in the specialized literature, are given different names, such as precessional transmissions or nutational transmissions.
Thus, transmissions with gears with spherospatial interaction of the teeth are called nutational transmissions by some researchers [
22,
23,
24,
25,
26,
27,
28,
29], defined by the nutation angle of the movement with a fixed point. Other researchers, including the authors of this study, consider that the correct name of the transmissions with spherospatial interaction of the teeth is precessional transmissions [
30,
31,
32,
33,
34,
35,
36,
37,
38], defined by the precession angle. This name is due to the fact that the precession is the only generalizing parameter of all the performance characteristics of the gear, including the shape of the tooth profile, the contact geometry, the kinematics of the contact point, and the relative slip between the mating flanks. At the same time, the nutation angle is only one of the five configuration parameters that influence the geometry of the transmission gear. The authors, in around 220 invention patents, use the name “precessional transmissions”. In the habilitation thesis of one of the authors, “
Multipair Precessional Planetary Transmissions”, submitted to Bauman Moscow State Technical University in 1989 [
37], the name is based on constructive aspects and the functional principle.
Starting in 2000, the name “precessional transmissions” has expanded and is now used in works by authors [
39,
40,
41], etc., from different countries.
Nutation and precession transmissions have the same kinematic structure. Both single-stage transmissions have a satellite gear, each with two crown gears, one of which meshes with the fixed gear and the other with the movable center gear. The difference in the number of teeth of the conjugate wheels in a precessional transmission is only ±1, and in a nutational transmission, it can be ±1 or ±2 [
25] (p. 5). The satellite wheels in both transmissions are mounted on the inclined portion of the crankshafts, upon rotation of which the satellite wheels perform spherospatial movement, thus ensuring the relative movement of the flank profiles of the teeth and a reduction in rotation. The kinematic characteristics of precessional (
Figure 1) and nutational [
25] (p. 4, Figure 4) transmissions are determined according to the number of teeth and their difference in conjugate wheels. The bearing capacity of the tooth contact of nutational or precessional transmissions depends on the geometry of the tooth contact and the number of pairs of teeth simultaneously engaged in the gearings.
According to [
22], Robert Davison almost accidentally discovered the concept of nutation motion while tossing a coin on the table, which, with a decreasing rotation speed with rolling, performed a strange motion. This motion, with simultaneous rotation and rolling of the coin around three axes, represents spherospatial motion with a fixed point, which also includes nutation motion. This motion concept has been harnessed in the design of speed reducers called nutation bevel gears. The relative rotational motions in the nutational device depend on the number of teeth of the meshing gears and the difference in their numbers.
The authors of [
22] believe that the nutation reducer is a totally innovative mechanical transmission developed in recent years, which is based on the principle of the interaction of teeth with nutation movement. They mention that the nutation gear reducer possesses the
unique characteristics of single-stage motion reduction, tooth meshing occurs at very high angles, and the overall
bearing capacity is higher. At the same time, the authors state that in the nutational transmission, the interaction of the teeth in the gear theoretically takes place with
pure rolling, which indicates that the heat emanating between the tooth flanks should be lower and have
higher energy efficiency. This article mentions that the NuGear gear transmission has only been experienced in virtual computer simulations [
27]. Since the kinematics, structure, and relative movements of the teeth in “nutating” and “precessing” gears are absolutely identical, by extension, we can see that despite the authors’ claims regarding the novelty of the existence of “pure rolling” between the flanks of the teeth in the gearing in the "nutation" transmission, it is identical in the ”precession” transmission.
Also, the author of [
42] in 1991, in the paper “
The wonderful world of reduction gears created by Ion Bostan”, mentions that the idea of precession transmission is due to the coincidental observations made by Ph.D., Assoc. Prof. Ion Bostan in August 1977 while watching a light music concert in Sopot, Poland. The event was accompanied by spherospatial motion rolling with a fixed point of a gymnastic ring projected using a laser beam on a screen. When rolling the ring with different frequencies and amplitudes, due to the interference of the positions of the ring on the rolling surface, the formation of a variable profile was observed. These profiles as a whole led to the idea of the existence of variable convex–concave profiles dependent on the crankshaft revolutions and the amplitude of the oscillations, and thus, dependent on the parameters of the precession movement.
Thus, in 1983, the first invention patent was registered, Precessional Planetary Transmission S.U. 1020667 A, with priority 11 February 1981.
Precessional transmissions can be used in technical fields where it is necessary to transform and transmit movement and load to their drive mechanisms, including the following: machine building, fine mechanics, high-precision mechanical systems, submersible techniques, and movement between sealed spaces, etc.
The further development of precessional transmissions provides for the following: the modernization and optimization of the geometry and kinematics of the interaction of the teeth in the precession gearing, of the methods of generating the flank profiles of the teeth, and of the tribological aspects of the interaction of the teeth.
Also under research and development are magnetic precession transmissions including variable transmission ratios.
The remainder of the paper is structured as follows:
Section 2. Kinematics of 2K–H-type precessional transmissions. Here, the influence of the number of teeth and their co-ratio on the range of the achieved transmission ratios is presented.
Section 3. Mathematical model of precessional gearing with convex–concave contact of the teeth. Here, the algorithm for the design of the geometry of the teeth and the kinematics of their interaction is described.
Section 4. Tooth contact geometry in multipair convex–concave gearing
. In this chapter, the conditions for the existence of the multiplicity of tooth engagement and the influence of the configuration parameters
on the shape of the flank profiles of the teeth are identified.
Section 5. Geometry and kinematics of tooth contact in the gearings
[
30]. This chapter examines the interaction of teeth with spherospatial motion described by Euler kinematic and dynamic equations with the identification of sliding and rolling of tooth flank profiles at contact points.
Section 6. Linear velocity of the contact point E
1 on the tooth profile of the central wheel.
Section 7. Linear velocity of the contact point E
2 on the tooth profile of the satellite wheel.
Section 8. Relative sliding between the tooth flanks is modified by shortening the heights.
Section 9. Variation in the relative sliding between the conjugated flanks of the teeth.
Section 10. Technological aspects. In this chapter, the procedures for generating the non-standard flank profiles of the gear teeth of the precessional gears are presented. The description of the methods and algorithms of the generation of the teeth of the wheels will be covered in articles dedicated to manufacturing technologies.
Section 11. Application aspects;
Section 12. Conclusions and recommendations;
Section 13. Patents. International patents (US and German) are mentioned, which protect innovative technical solutions regarding the shape of flank profiles, ensuring the multiplicity of tooth engagement, and sliding and rolling of teeth in precessional gearings [
33,
34,
35].
2. Kinematics of 2K–H-Type Precessional Transmissions
The technical solutions regarding the development of precessional transmission have been protected with over 220 inventions, including international patents (SUA, Germany, Russia) on their constructive functional structure, gear geometry, kinematics, and tooth geometry contact, as well as the technological processes for generating flank surfaces [
31,
32,
33,
34,
35].
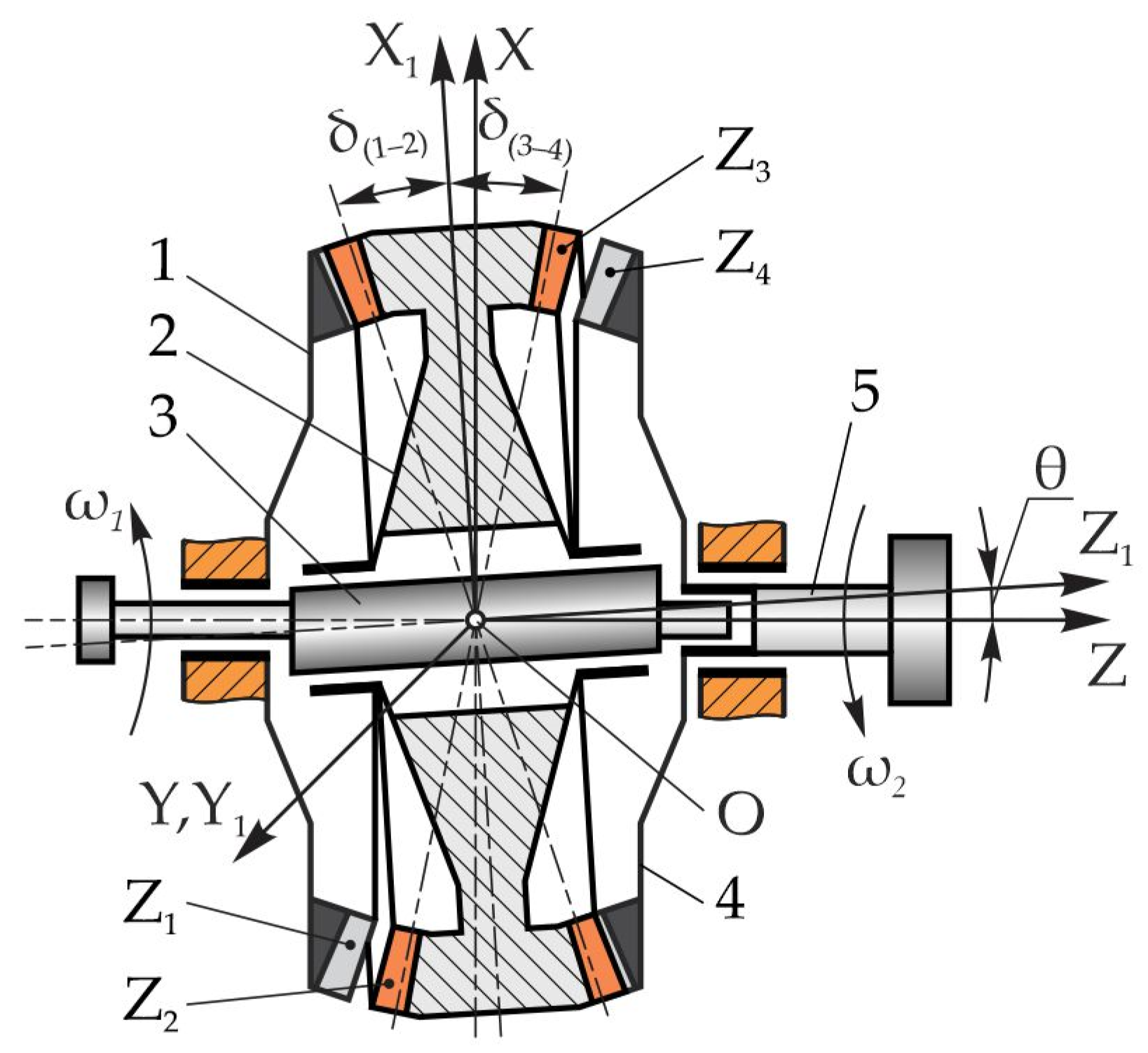
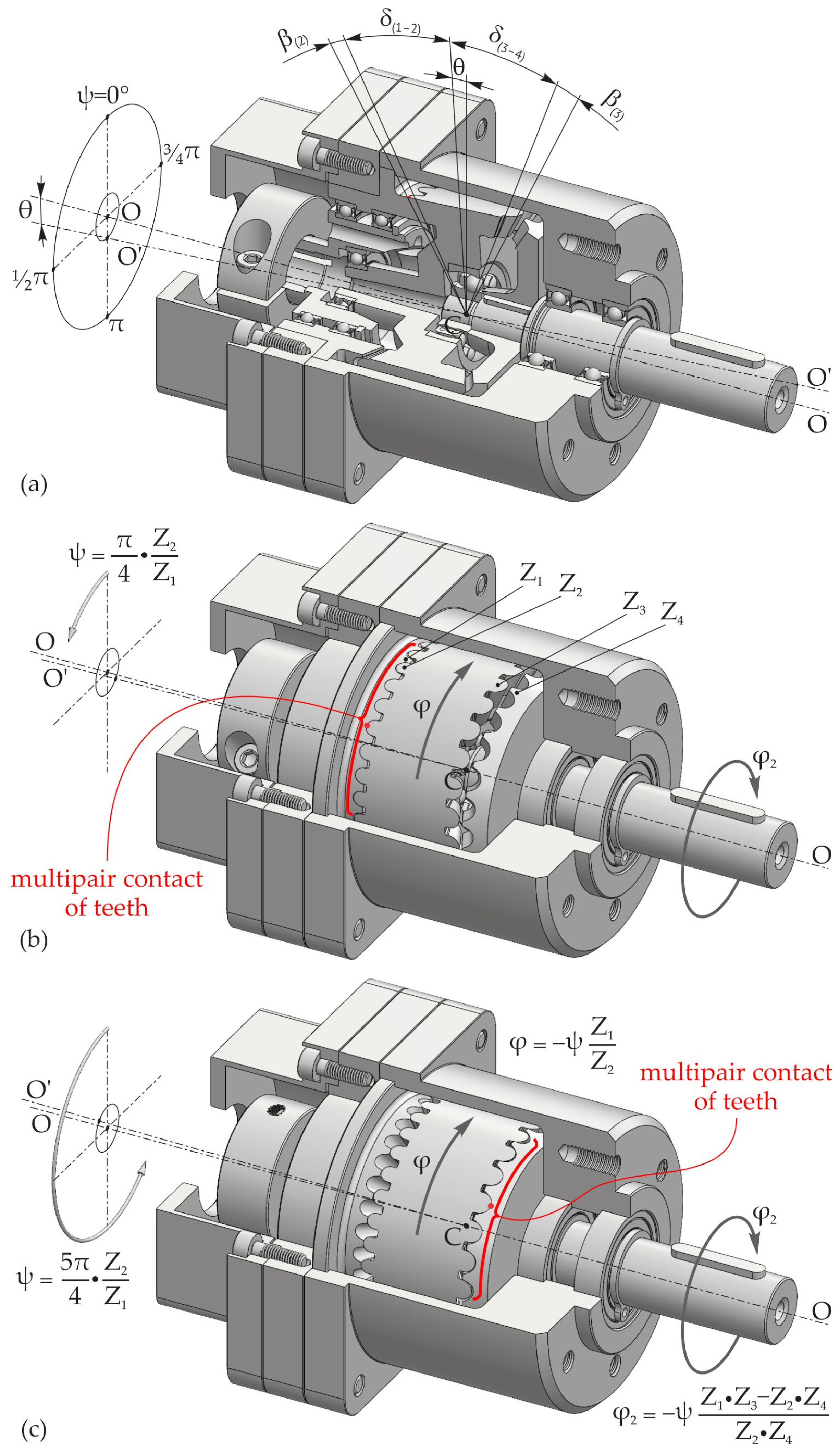
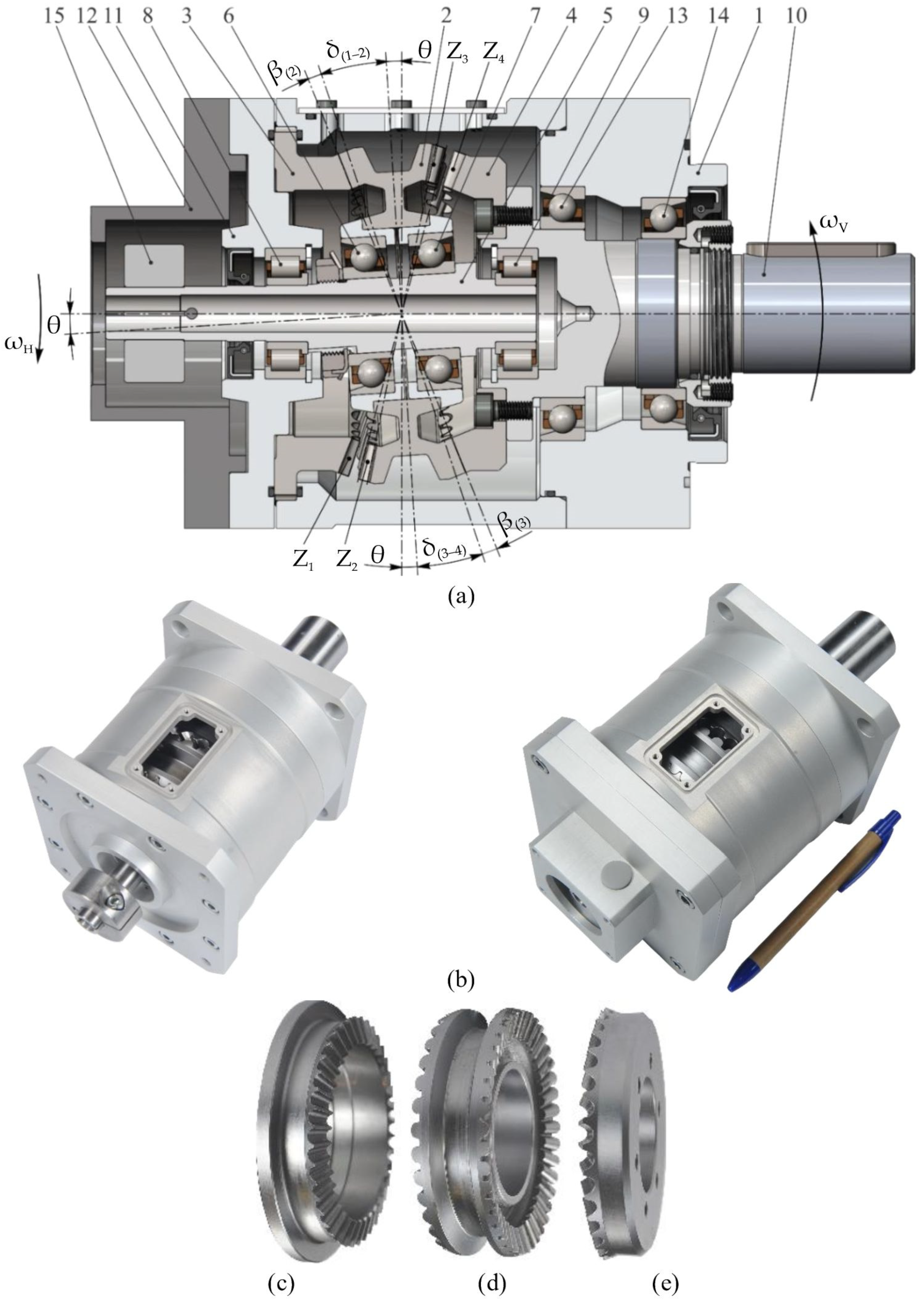
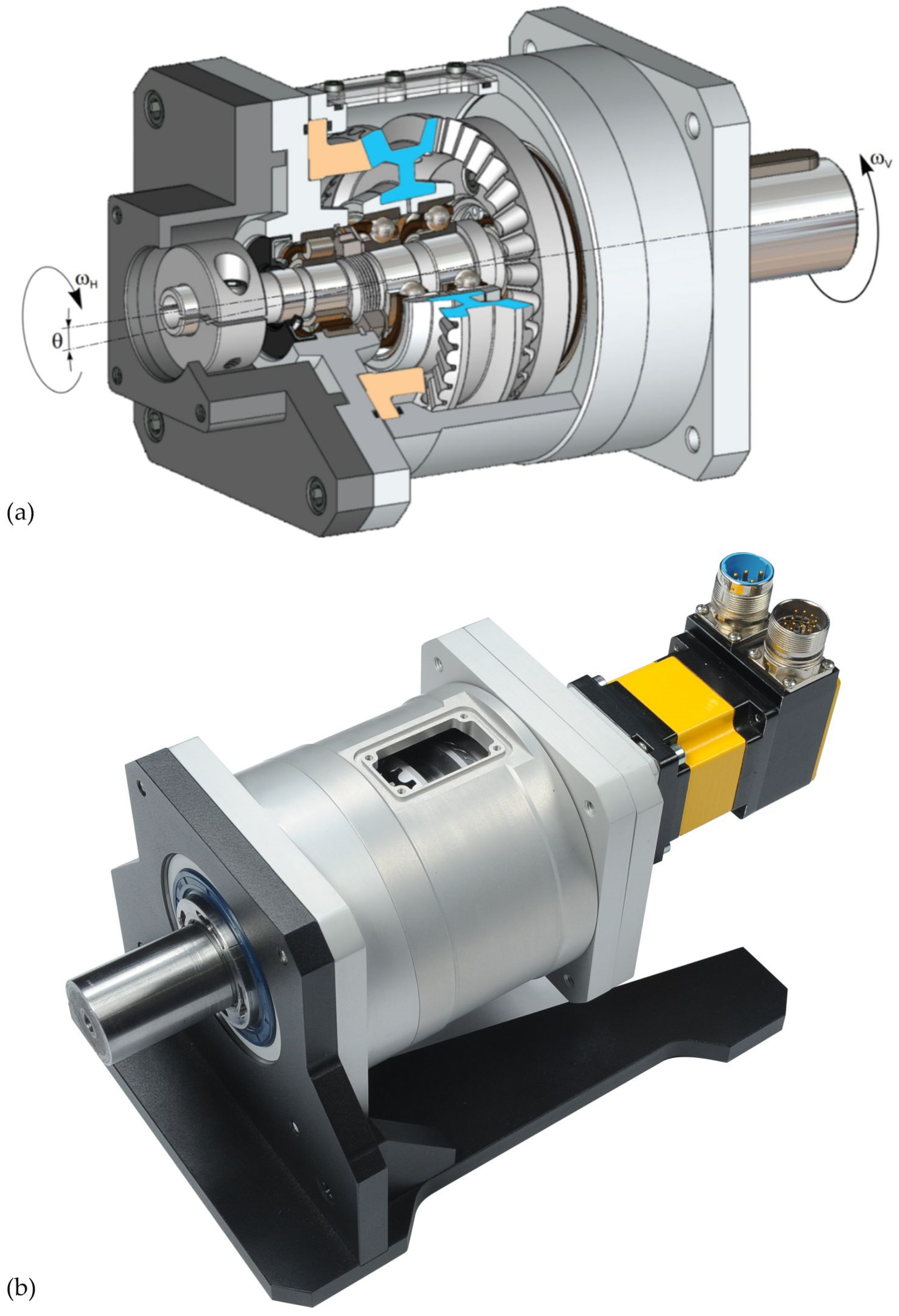
The 2K–H-type precessional transmission (PT) includes satellite wheel 2 with two toothed crowns with Z
2 and Z
3 as the number of teeth located, respectively, on the conical axoids under δ
(1–2) and δ
(3–4), which gears with the immobile 1 and mobile 4 central wheels, rigidly linked to driven shaft 5 (
Figure 1). Satellite wheel 2 is mounted on the portion of motor shaft 3 that is inclined under the nutation angle θ, between central wheels 1 and 4 [
30].
When crankshaft 3 rotates with the angular velocity ω1, satellite 2 performs spherospatial motion with a fixed point O, called the precession center.
The transmission ratio is determined by the following relation:
where Z
2 and Z
3 are the number of teeth in satellite wheel 2 and Z
1 and Z
4 are the number of teeth of central wheels 1 and 4.
The transmission ratio i achieved in the 2K–H-type transmission depends on the correlation of the numbers of geared teeth Z1(4) = Z2(3) ± 1.
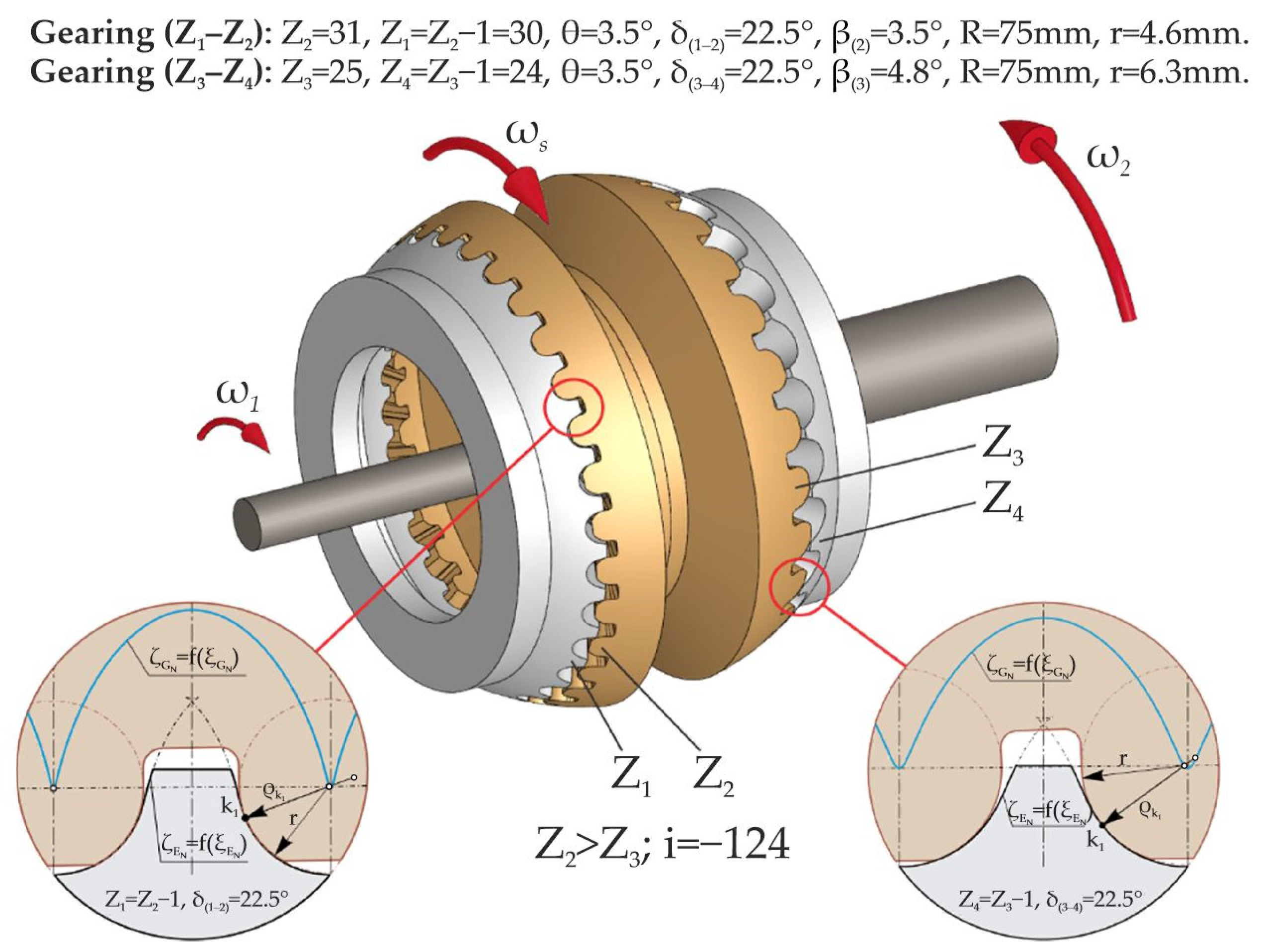
Depending on the configuration of the tooth numbers Z
1, Z
2, Z
3, and Z
4 and others and their correlation, in transmissions with teeth gearings (Z
1–Z
2) and (Z
3–Z
4), if Z
1 = Z
2 − 1, Z
4 = Z
3 − 1, 15 ≤ Z
1,2,3,4 ≤ 60, ±20 ≤ i ≤ ±3600 transmission ratios are ensured (
Figure 2).
In the case of Z2 > Z3, the driving and driven shafts rotate in different directions (−), and in the case of Z2 < Z3 they rotate in the same direction (+).
Under these conditions, if Z1 = Z2 − 1 and Z4 = Z3 + 1, the 2K–H transmission ensures transmission ratios in the range of +8.3 ≤ i ≤ +30.3, 15 ≤ Z1,2,3,4 ≤ 60, and if Z1 = Z2 + 1 and Z4 = Z3 − 1, the 2K–H transmission ensures transmission ratios of −7.3 ≤ i ≤ −29.3.
According to the requirements of mechanical transmission consumers [
30,
37], the need for reducers according to the criterion of the transmission ratio i is expressed by a normal logarithmic curve with the maximum density in the area i = 32.1, and the ratios in the range i = (8–50) represent around 75% of their total used worldwide.
According to the transmission ratio density diagram shown in
Figure 3, transmission ratios in the range ±8 ≤ i ≤ ±20 cannot be achieved with one-stage involute transmissions, but only with reducers with two to three stages, which leads (compared to those with one stage) to a sudden increase in the dimensions of the reducer, the number of components and, finally, to an increase in the cost of these transmissions.
Unlike classical, cycloidal, or harmonic involute transmissions (
Figure 3), 2K–H precessional transmissions ensure realization in a single stage, including small transmission ratios by choosing the number of teeth Z
1, Z
2, Z
3, and Z
4 and their correlation [
30] (pp. 341–353) depending on the transmission ratio ±i required in the design specifications.
4. Tooth Contact Geometry in the Multiple-Pair Convex–Concave Gearing
Based on the analysis of the interaction of teeth in the precessional gearing with spherospatial motion with a fixed point, its bearing capacity depends on three factors, namely:
The geometry of the convex–concave contact of teeth, according to solid deformable body mechanics, provides a bearing capacity inversely proportional to the difference in tooth flank curvatures, i.e., the smaller the difference in tooth flank curvatures, the greater the contact bearing capacity for the same regime, material, lubricant, and lubrication parameters.
The variability of the profile of the teeth of the central gears according to the parametric configuration [Z
g − θ, ±1] provides at one precession cycle
, a lot of k
i contacts, with the distance between neighboring contacts equal to the angular pitch
[
35] (p. 9).
Given the condition stated on p. 2, it follows that for the same crankshaft coordinate, for example,
(
Figure 7b) or
(
Figure 7c) simultaneously in the gearing, there are eight pairs of teeth (with profiles cut by modification determined by the calculation of the teeth’s resistance to contact pressure), with four pairs having contact on the active profile and four pairs having contact on the passive profile of the teeth.
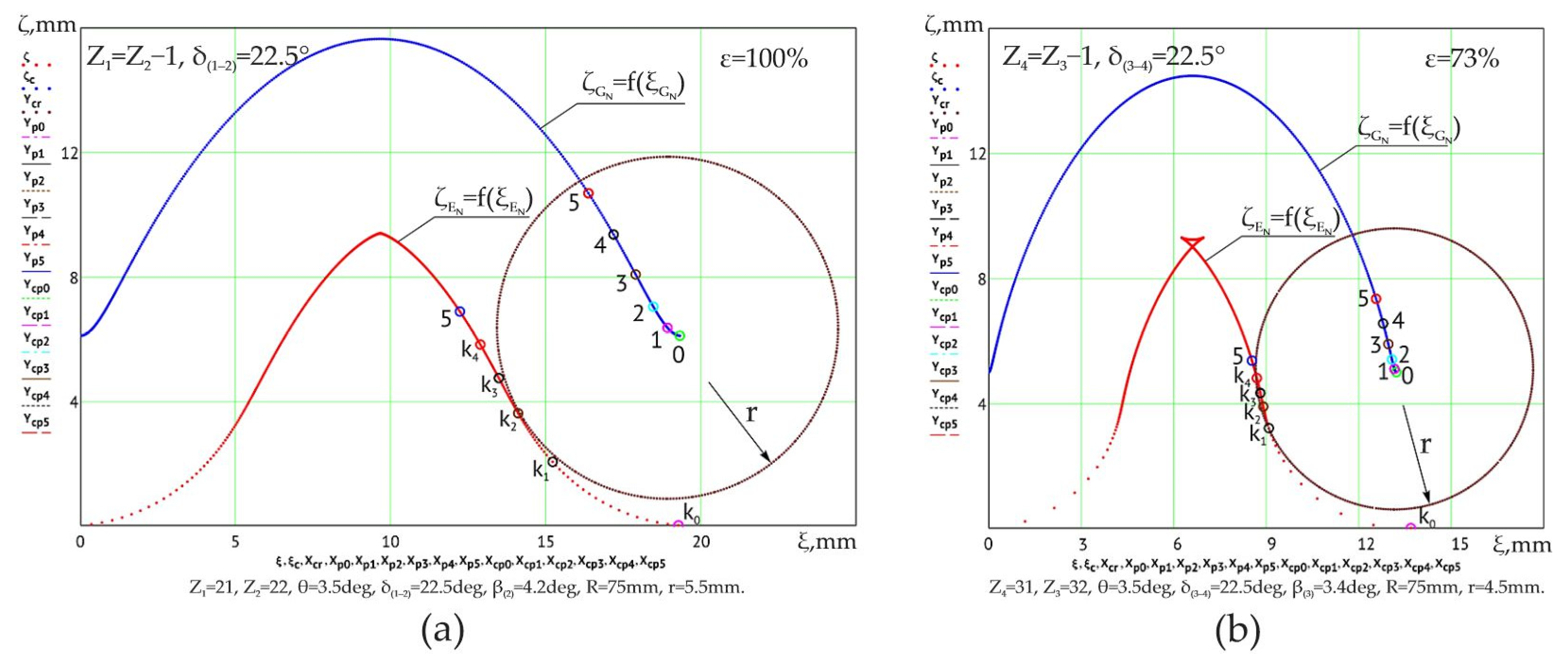
Figure 7 shows the evolution of the conjugation of the teeth (Z
1–Z
2) and (Z
3–Z
4) in the gears
, with the correlations of the tooth numbers Z
1 = Z
2 − 1, Z
4 = Z
3 − 1 and the angles of the conical axoids δ
(1–2) = δ
(3–4) = 22.5° depending on the precession angle ψ.
In order to reduce frictional sliding between the flanks, in the precessional transmission with the gear
, the teeth are modified by shortening their height so as to keep simultaneous gearing up to three or four pairs of teeth with contacts k
0, …, k
4 (
Figure 8,
Figure 9 and
Figure 10) located on the active side of the gear area.
Therefore, if a gear is designed with four pairs of teeth engaged in transmitting the load through the contacts k
0, …, k
4, there will be eight pairs of teeth in the gear area, of which four pairs are passive (do not transmit load). In this case, when rotating the driving shaft with the angle
, the eight pairs of teeth in the gear area will rotate at an angle between two neighboring teeth. Each pair of teeth will go through the gearing phase of the preceding tooth pair (
Figure 9 and
Figure 10).
Figure 7a shows the positioning of the pairs of teeth conjugated simultaneously in the gears
, with the precession angle ψ = 0°. When rotating the crankshaft with the angle
, the positioning of the pairs of teeth conjugated simultaneously in the gears (Z
1–Z
2) and (Z
3–Z
4) is shown in
Figure 7b, and up to the angle
, the positioning of the pairs of teeth conjugated simultaneously, (Z
1–Z
2) and (Z
3–Z
4), is shown in
Figure 7c.
The energy losses in the precessional transmission with the toothed gear , with the reducer operating mode, are estimated based on the evolution of the relative friction speeds between the tooth flanks, and the bearing capacity is based on the evolution of their contact geometry.
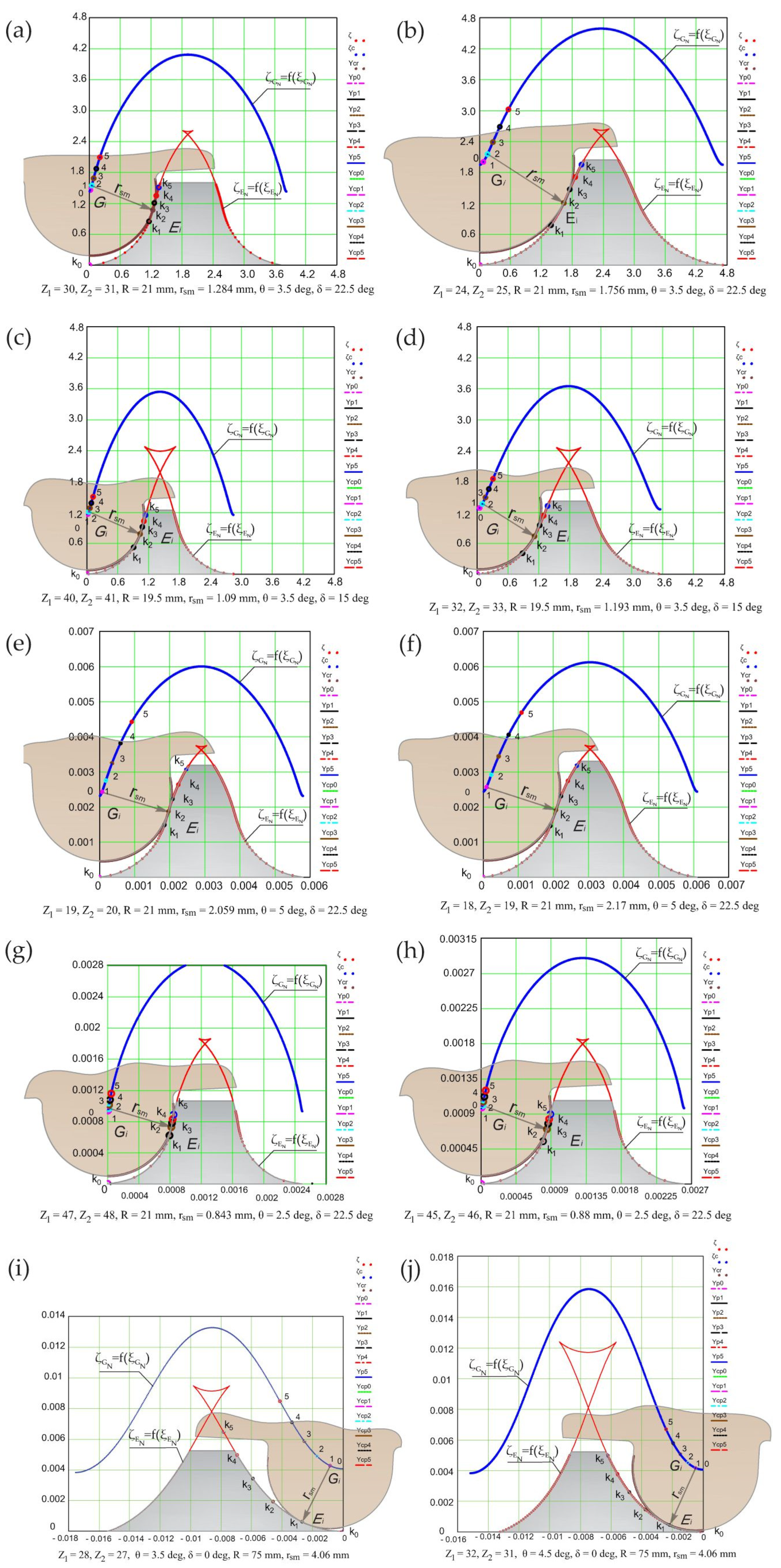
Figure 8 shows examples of tooth profiles modified according to the dispersion of the contact points k
i of the simultaneously conjugated flanks in the gears
with the correlation Z
1 = Z
2 − 1 (
Figure 8a–h)) and Z
1 = Z
2+1, respectively, (
Figure 8i,j) for configuration parameters [Z
g − θ, ±1] selected randomly and variably (computer-designed according to Equations (28) and (33)) [
37].
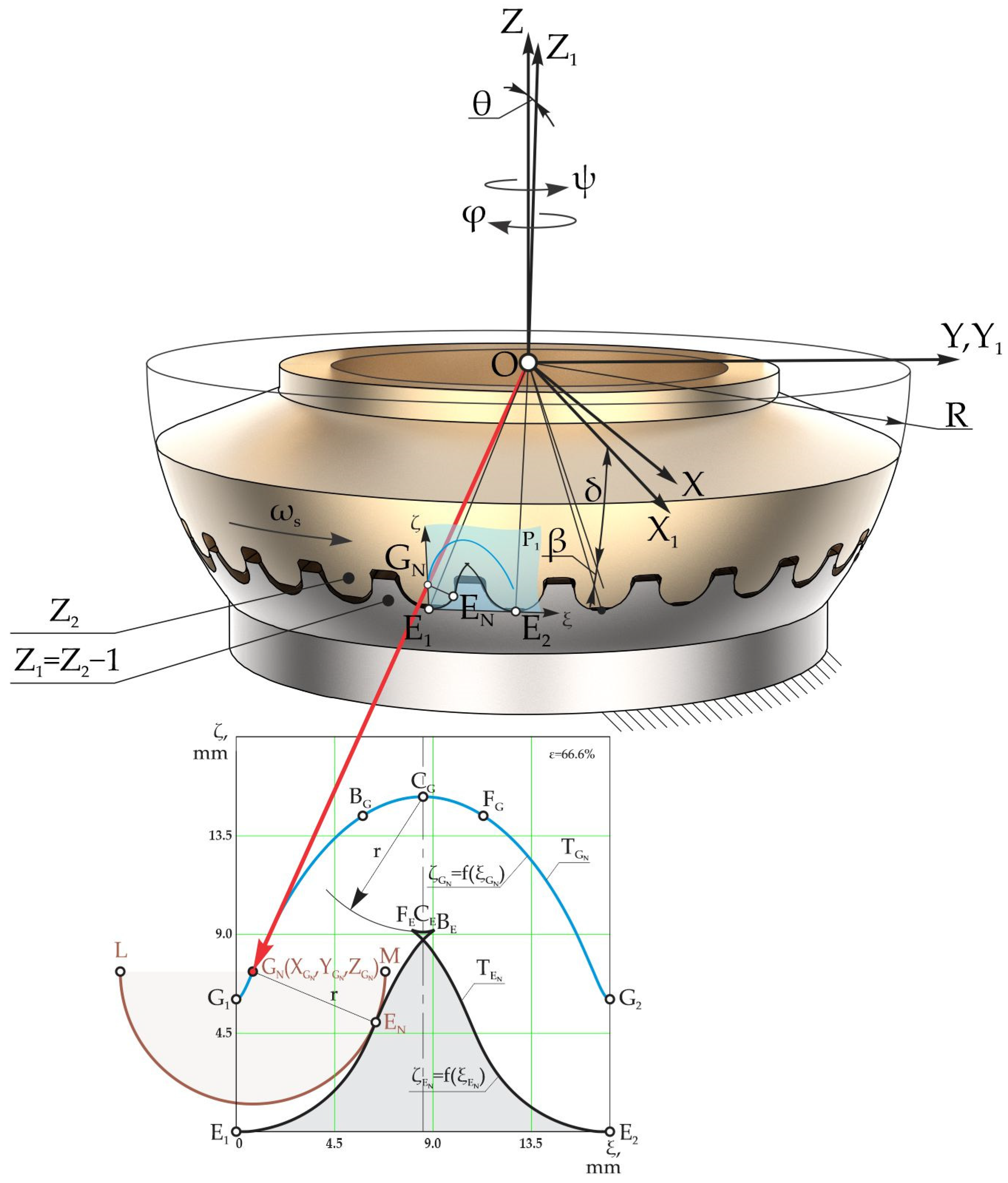
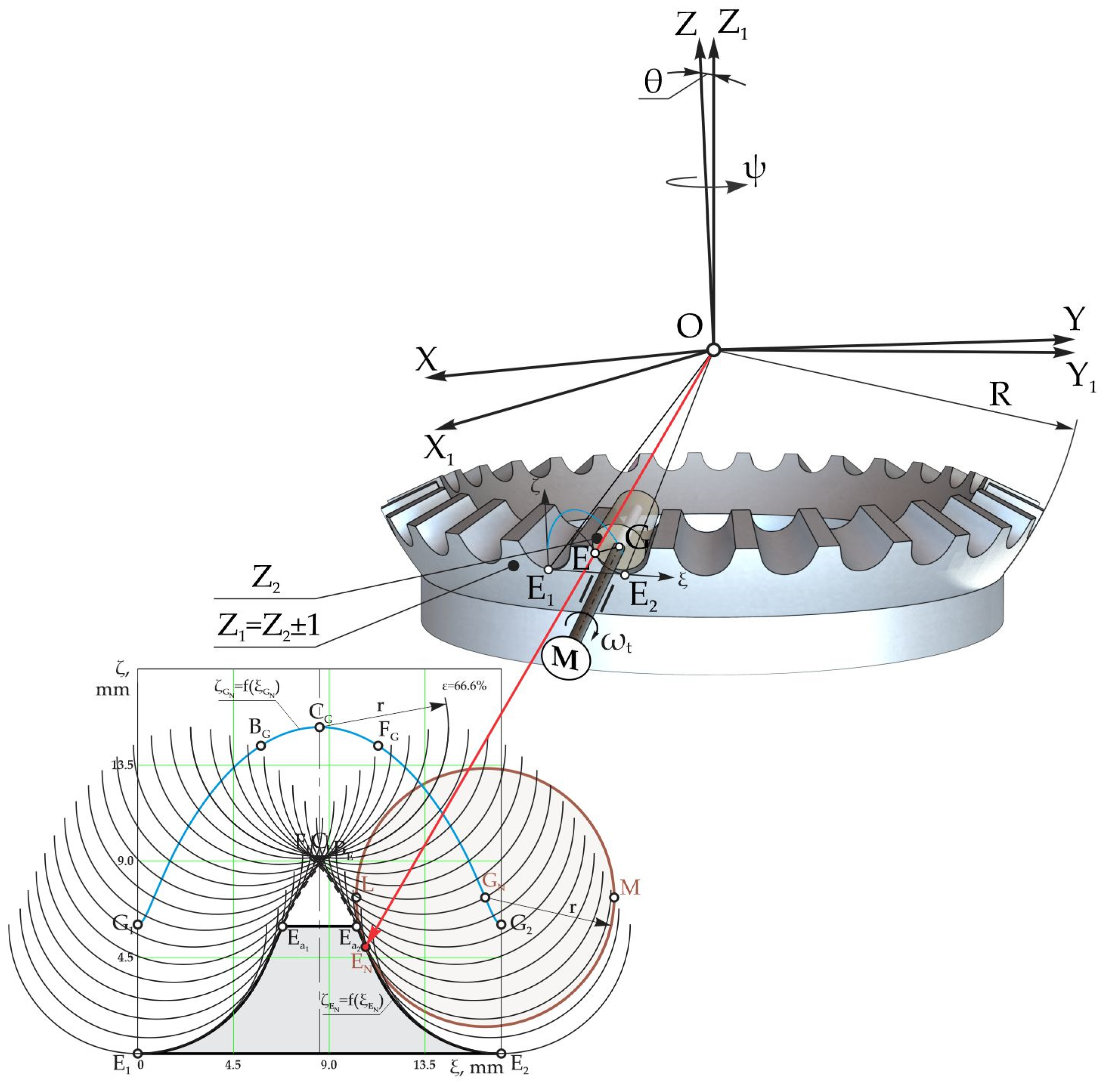
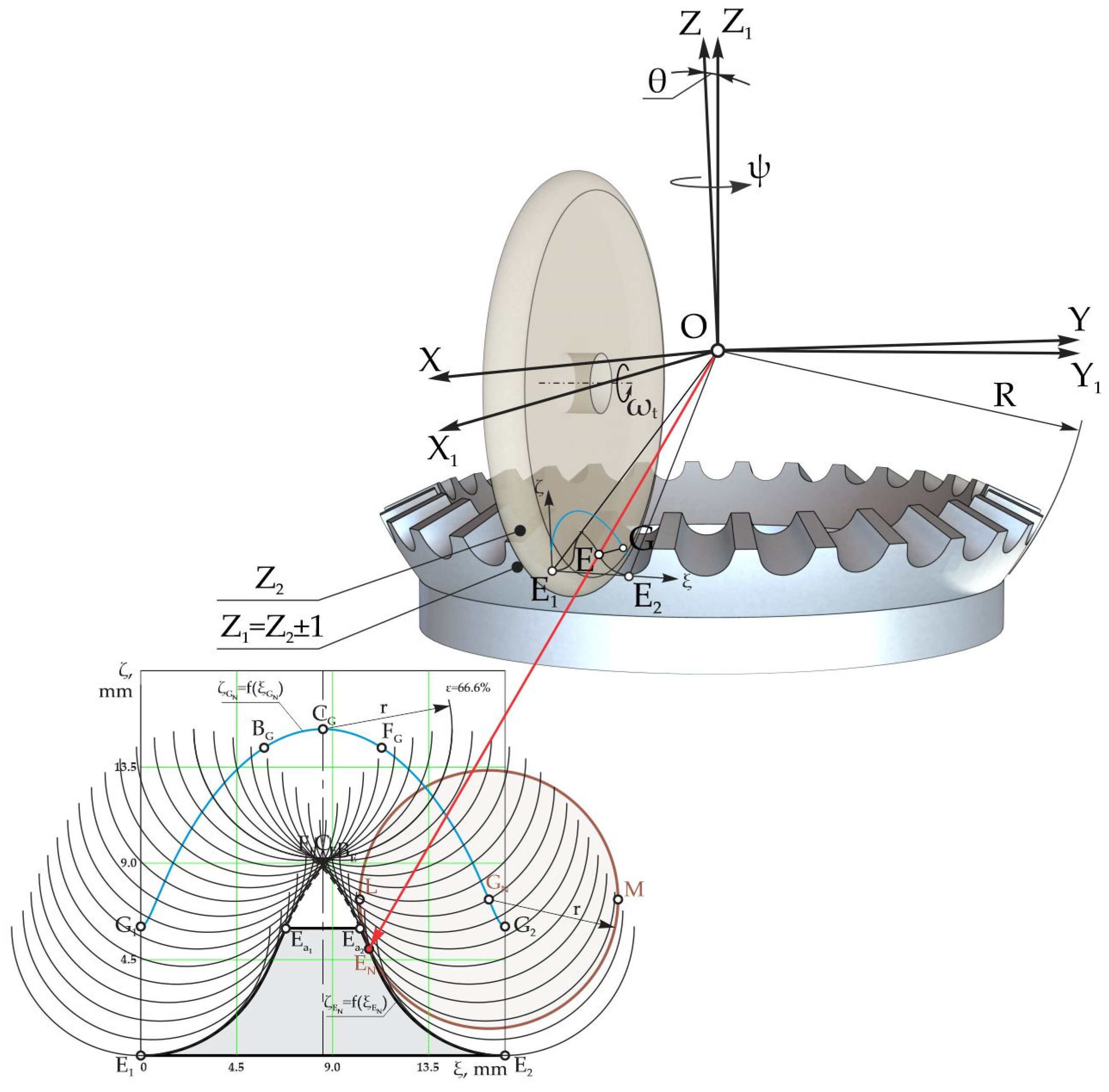
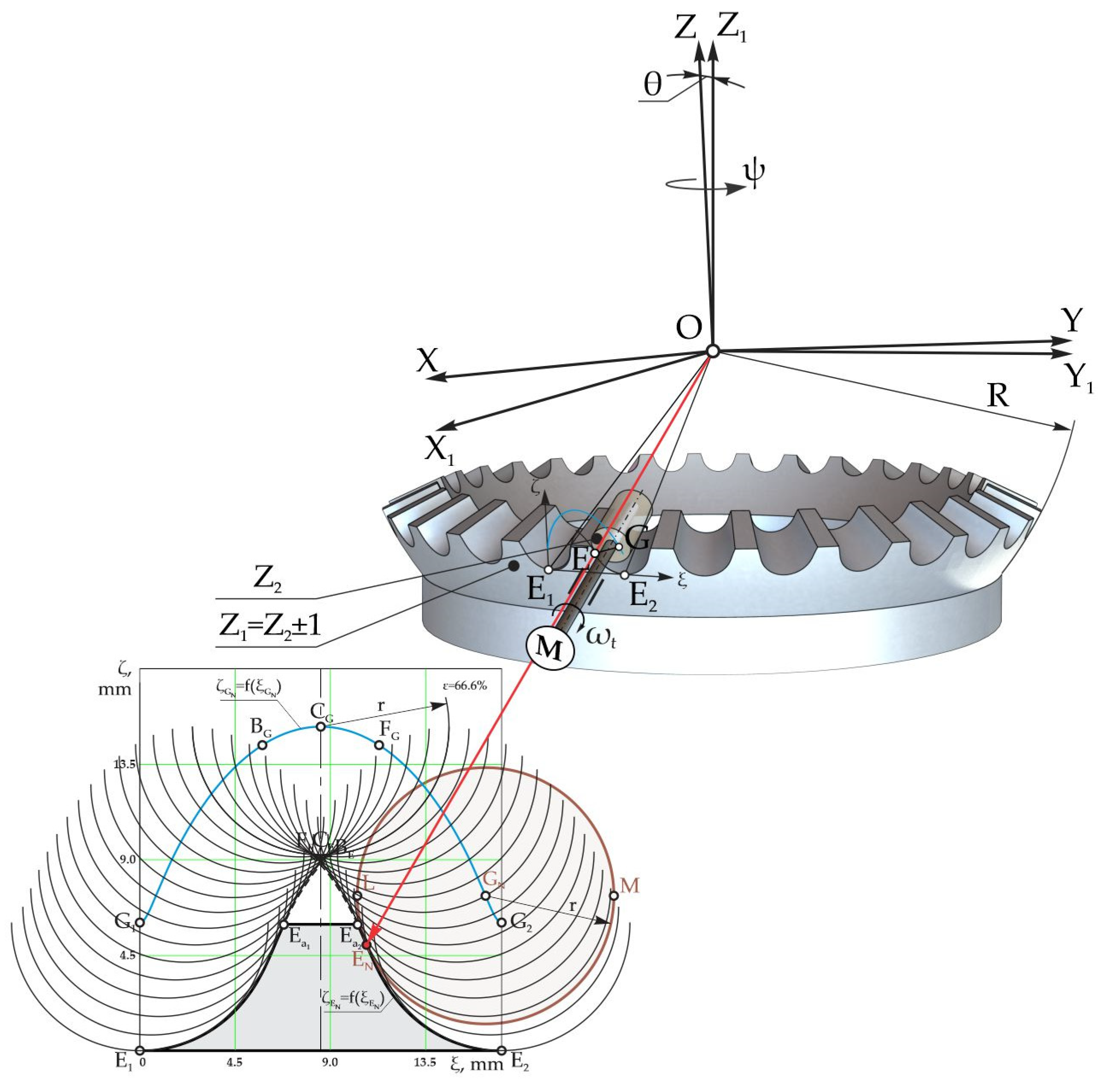
In the presented profilograms, the functions
and
represent, respectively, the trajectory of the motion of the origin of the circle arc G of the profile of the satellite wheel teeth and the profile of the central wheel teeth, expressed in the parametric equation of point E in cartesian coordinates, with the variation of the precession angle from ψ = 0° to ψ = 2πZ
2/Z
1 [
34,
35].
The profiles presented in
Figure 8a–h are recommended for the elaboration of precessional transmissions with a reducer operation regime and with a transmission ratio in the range of ±20 ≤ i ≤ ±3600. Those in
Figure 8i,j are for precessional transmissions with a transmission ratio of ±7.3 ≤ i ≤ ±30.3 and a reducer operation regime if the angle of the conical axoid δ
1(4)–2(3) = 0° or a multiplier operation regime if δ
1(4)–2(3) > 0°.
The contact points k
0…k
5 (
Figure 8) of the flanks of the teeth in the gear area are transposed on the profile of the teeth of the central wheels according to ψ, corresponding to each pair of teeth simultaneously conjugated.
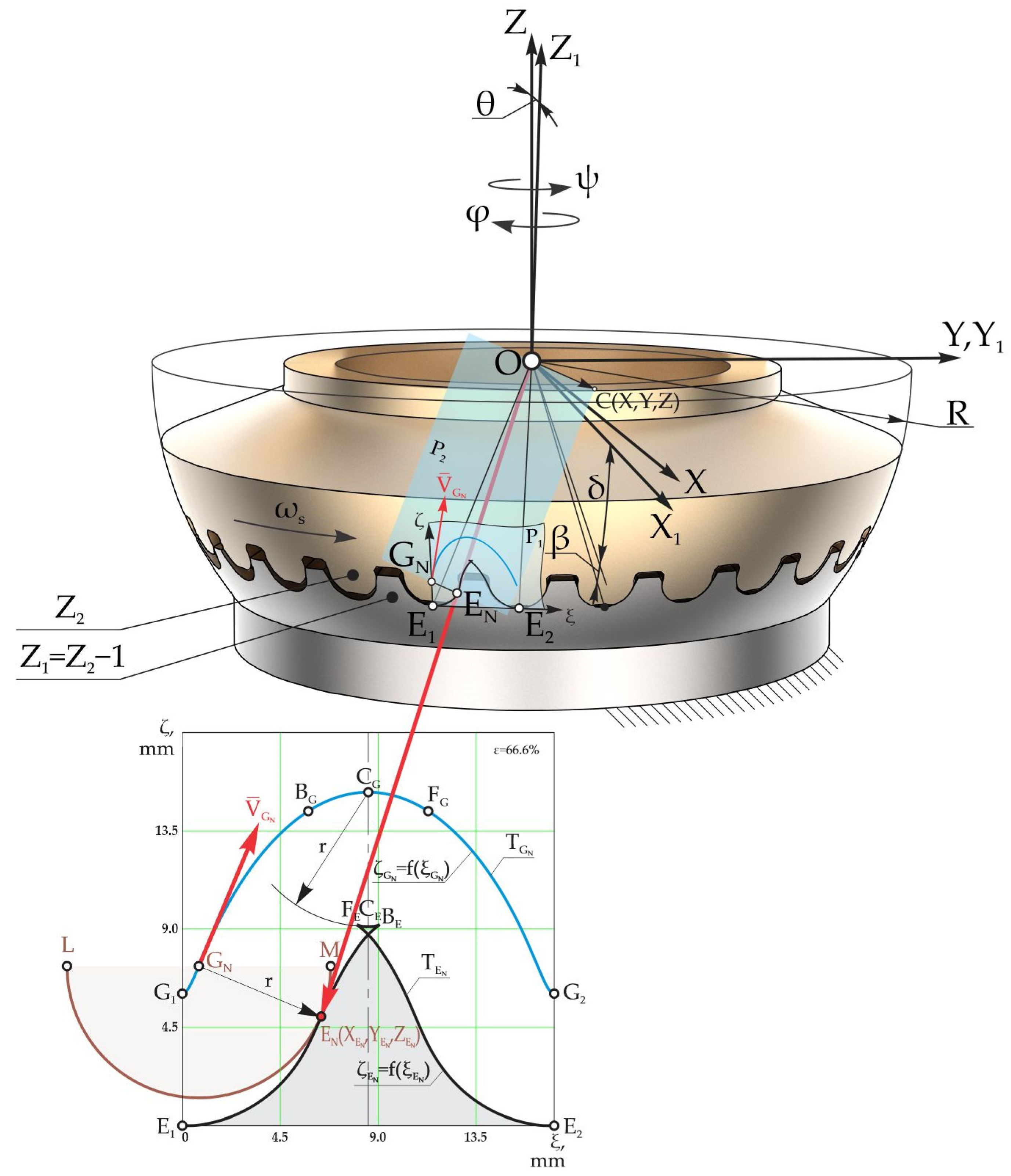
5. Geometry and Kinematics of Tooth Contact in the Gearings
It is important to note that in precessional gearings
with convex–concave profiles, the interaction of the teeth occurs in spherospatial motion, with relative sliding V
sl in the contacts of simultaneously conjugated tooth pairs k
i and, at the same time, with relative rolling ω
θ around the contact points k
i (
Figure 9 and
Figure 10).
The relative rolling ωθ of the profiles of the teeth of the satellite wheel crown with respect to the profiles of the teeth of the central wheel occurs around their contact points ki, which predominantly depend on the value of the nutation angle θ of the spherospatial motion and the angular pitch between neighboring contact points k0–k1, k1–k2, k2–k3, etc.
The relative rolling ω
θ of the flank profiles of the vector-conjugated teeth is contingent on the angular rolling direction ω
θ of the flank profiles, either aligned or counter to the linearly traveling direction of the contact points k
i of the flanks of the simultaneously conjugated tooth pairs, with relative sliding V
sl. It has been observed that the contact point k
i of the flanks of the simultaneously conjugated teeth travels along the active profile of the teeth on the central wheels, progressing from the root toward their tips (
Figure 9).
By analyzing
Figure 9 and
Figure 10, it was determined that the angular coordinates of the contact points of the flank profiles of the simultaneously conjugated teeth are expressed through the angular pitch of the contact point, as defined by the relationship
, where i = 0, 1, 2, 3… is the order number of the conjugated tooth pairs, starting with the pair of teeth at contact point k
0.
While analyzing the kinematics of the contact points k
i of the simultaneously conjugated teeth in the gears
shown in
Figure 9d,e, it is evident that the spherospatial interaction of the flank profiles causes the angular rolling of the conjugated flanks ω
θ around the contact points E, with their migration in the direction or counter to the direction of the relative sliding vector between the flanks V
sl. This ensures an increase or decrease in profile rolling and energy loss between the conjugated flanks, respectively.
Thus, in the precessional transmission with toothed gear , where the ratio of the number of teeth of the conjugated wheels is Z1 = Z2 − 1, Z4 = Z3 − 1, δ(1–2) > 0°, δ(3–4) > 0° and Z2 > Z3 or Z2 < Z3, as the precession angle increases within the range of , tooth interaction occurs with the presence of the frictional forces with relative sliding Vsl at the contact points ki, migrating from the roots toward the tips of the teeth. Simultaneously, there is a reciprocal rolling of the flank profiles ωθ around the contact points ki, with migration in the same direction. This leads to an increase in the degree of rolling ωθ of the conjugated tooth flanks relative to the sliding with friction between the simultaneously conjugated tooth flanks and, consequently, an increase in the mechanical efficiency of the transmission.
Figure 10 shows the relative rolling ω
θ and sliding V
sl of the tooth flank profiles at the contacts k
0, k
1, k
2, k
3… and
… for the toothed gearing
with Z
1 = Z
2 − 1, Z
4 = Z
3 + 1, δ
(1–2) > 0°, δ
(3–4) > 0° and Z
2 > Z
3 or Z
2 < Z
3, operating under the multiplier regime.
The functioning of the 2K–H precessional transmission in a multiplier (or differential) regime can be efficiently achieved under the following conditions:
The correlation of the number of teeth in one of the gears , is either Z1 = Z2 + 1, Z4 = Z3 − 1 or Z1 = Z2 − 1, Z4 = Z3 + 1, and the angle of the conical axoid δ(1–2) > 0°, δ(3–4) > 0° and Z2 > Z3 or Z2 < Z3;
The satellite wheel is installed as axially floating between the stationary and mobile central wheels, tangentially sliding in relation to the central gears;
The parametric configuration [Z
g − θ, +1] must ensure a pressure angle between the teeth in one of the engagements (Z
1–Z
2) or (Z
3–Z
4), α
ω > 45° (
Figure 10).
The rotational motion of the shaft and mobile central wheel with the profile angle of the teeth αω > 45°, through the effect of the inclined wedge, turns into the spherospatial motion of the satellite wheel. As a result, the teeth Z2 and Z3 engage accordingly with the teeth Z1 and Z4 of the immobile central wheel, fixed in the housing, and the mobile central wheel, mounted on the driving shaft, thus achieving the multiplication ratio i = −Z2Z4/(Z1Z3–Z2Z4).
So, in the tooth meshing (Z1–Z2), the rolling of the teeth ωθ around their contact points ki causes them to travel in the direction of the sliding of the flanks Vsl. On the other hand, in the tooth meshing (Z3–Z4), the rolling of the teeth around their contact points ki causes them to travel against the direction of relative sliding, with friction between the flanks.
The relative sliding with friction in the contacts of the teeth k
i, and the relative rolling of the flanks of simultaneously conjugated teeth, is illustrated in
Figure 3 and
Figure 4, where the following are true:
Remark 2. In precessional gearing
, teeth interact with spherospatial motion, with the presence of relative sliding Vsl at the contact points ki of flank profiles and, simultaneously, with relative rolling ωθ around the contact points ki.
Remark 3. The relative sliding Vsl depends on the difference in linear velocities at the contacts of teeth Z1 and Z2 (or Z3 and Z4), and quantitatively depends on the parameters of the [Zg − θ, ±1] configuration.
Remark 4. The vector of relative velocity Vsl between the conjugated tooth flanks is tangentially oriented to the flank profiles at the contact points ki, which, as the precession angle increases, travel from the root to the tip of the teeth.
Remark 5. The relative rolling ωθ of the flank profiles of simultaneously conjugated teeth around the rolling centers E (contact points) depends on the nutation angle θ and the angular stage of the contact points ki on the conjugated flank profiles.
Remark 6. In cases where the direction of migration of the rolling center E (contact points) of the flank profiles aligns with the vector of relative sliding Vsl, the relative rolling ωθ compared to the relative sliding increases, reducing energy losses in the meshing of the teeth and vice versa.
6. Linear Velocity of the Contact Point E1 on the Tooth Profile of the Central Wheel
The interaction of conjugated teeth in precessional gearing takes place with the presence of relative sliding Vsl between the flanks.
Both the geometric shape of the tooth contact and the kinematics of the contact point depend on the value configuration of the geometric parameters of the gear, noted by [Zg − θ, ±1], among which are Z1, Z2, δ, θ, and β, and the correlation of teeth Z1 = Z2 − 1 or Z1 = Z2 + 1.
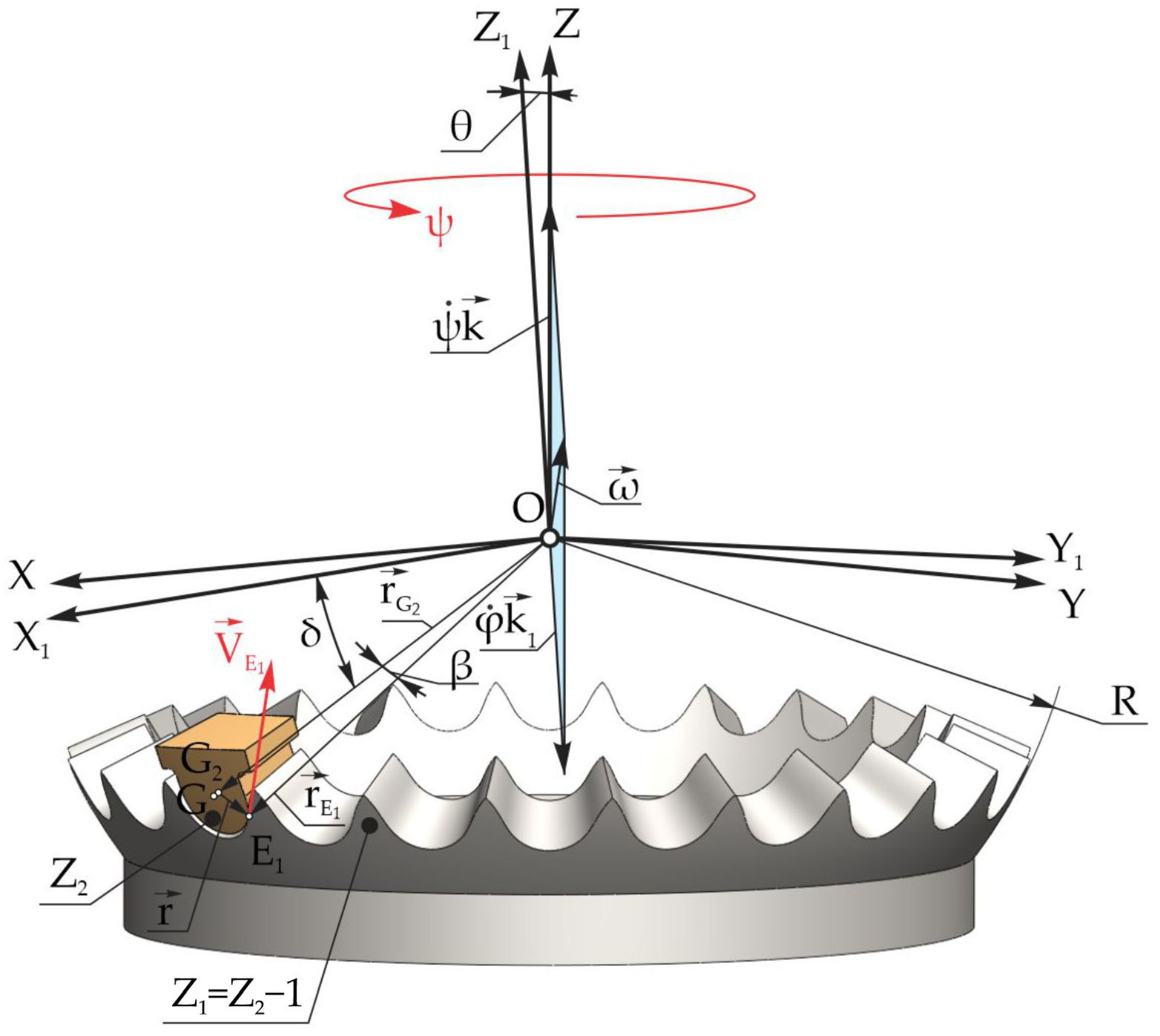
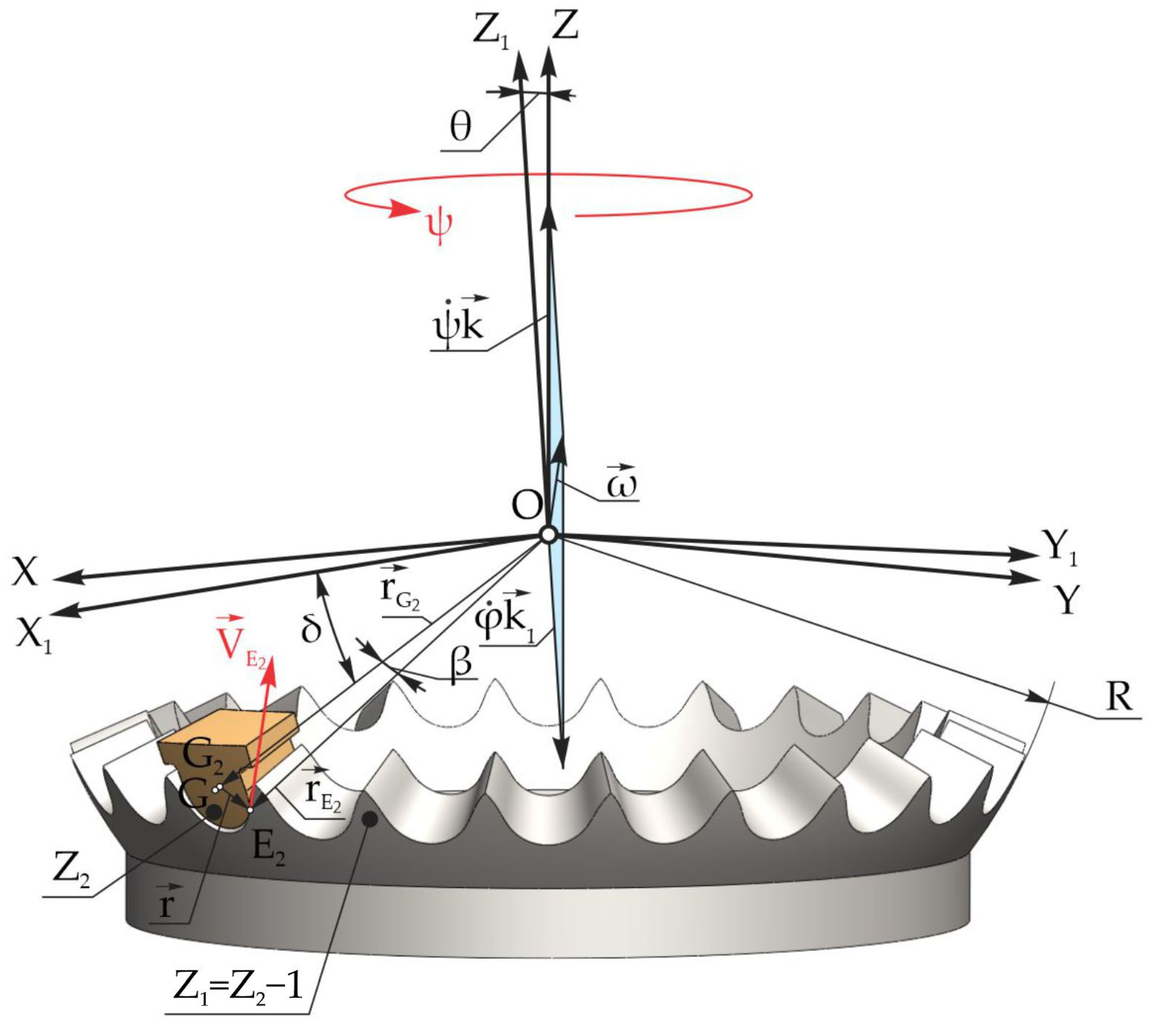
The position vector of the contact point E
1 of the conjugated teeth, which belongs to the profile of the central wheel tooth (
Figure 11), is identified through the vector equation:
where
and
, where r is the position vector of the point E
1 relative to the point G
2 and has a modulus equal to the radius of curvature of the profile of the satellite teeth with a circle arc profile, and
and
are the collinear position vectors of the origin of the radius of curvature of the teeth in the circle arc of the satellite on the sphere and in the direction OG (
Figure 11).
The position vector of the origin of the radius of curvature
can be expressed by the coordinates
, and
:
and the velocity vector
of the point G
2 is
.
Here, , , and are the projections of the velocity of point G2 on the axes of the fixed coordinate system OXYZ.
To determine the position vector of the contact point E
1 (
Figure 11), we noted the axis OG the point G
2, located in its normal section passing through the contact point E
1, and we identified the trajectory of its motion in the fixed coordinate system OXYZ expressed by coordinates
,
, and
depending on ψ:
where β is the tip angle of the satellite tooth profile.
The projections on the axes OX, OY, and OZ of the velocity vector of the
are as follows:
where Z
1 is the number of teeth of the central wheel; Z
2 is the number of teeth of the satellite; and
is the angular velocity of the crankshaft, which, given its rotation frequency n = 3000 rpm, is ω = 2πn s
−1.
We can denote by
a the vector product
in (37):
where
Using the notation in (42), we obtain the vector
r:
The vector derivative
in relation to time was determined from the following relation:
where
was introduced:
The projections on the axes OX, OY, and OZ of the acceleration of point G
2 are defined by the following expressions:
To determine the linear velocity of the contact point of the conjugated teeth, which belongs to the profile of the central wheel teeth E
1, we derive (37) with respect to time and obtain the following:
The projections of the vector
on the axes OX, OY, and OZ are determined by the following expressions:
The modulus of the velocity of the contact point E
1 is determined from
8. Relative Sliding between the Tooth Flanks Is Modified by Shortening the Heights
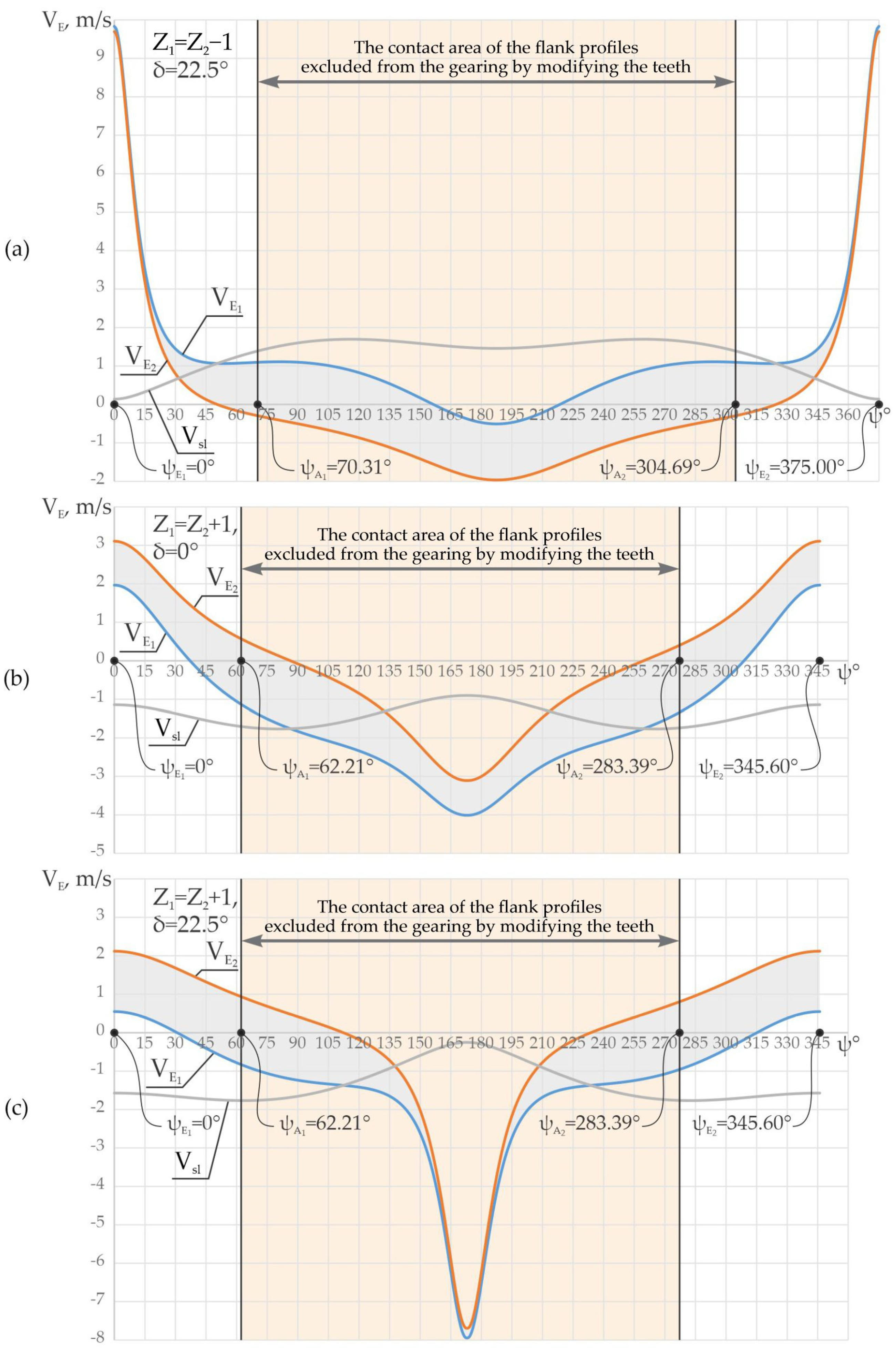
The relative sliding with friction between the flanks of the conjugated teeth in the precessional gearing varies within a precessional cycle depending on the angular coordinate of the contact point of each pair of simultaneously conjugated teeth, which, in turn, depends on the precession angle ψ of the crankshaft and is determined from relation (58).
Figure 13a shows the variation in the relative sliding velocity V
sl depending on the precession angle ψ for the precessional gearing
with the tooth correlation Z
1 = Z
2 − 1 and the angle of the conical axoid δ = 22.5°.
Figure 13b shows the correlation Z
1 = Z
2 + 1 and δ = 0°, and
Figure 13c shows the correlation Z
1 = Z
2 + 1 and δ = 22.5°.
It should be noted that in the toothed precessional gearing , the reference frontal multiplicity εa is up to 100% of the pairs of simultaneously conjugated teeth.
For the same positioning of the crankshaft experienced through the precession angle ψ, it is necessary for the gearing to contain a certain number of pairs of teeth at the same time, spaced from each other by the angular pitch .
Given the analysis of the variation in the relative velocities between the flanks of the conjugated teeth shown in
Figure 13a–c, the minimum relative sliding dominates in the contacts of the conjugation of the profiles of the teeth of the central wheels in the foot area with the top profiles of the teeth of the satellite wheel.
For these reasons, in order to reduce the energy losses in the toothed gearings
, modifying the teeth by shortening their height by cutting the tips of the central wheel teeth is proposed [
33,
34]. Thus, shortening the height of the teeth by cutting off their tips ensures that a sufficient number of pairs of teeth (determined from the calculation of the resistance of the teeth to the contact pressure σ
H) are kept in gearing.
For example, for the gearing with the correlation Z1 = Z2 − 1 and δ = 22.5°, four pairs of teeth with an angular pitch extend to the crankshaft precession angle ψ = 62.4° for the contacts on the active profiles of the teeth. For gearings with Z1 = Z2 + 1 and δ = 0° or δ = 22.5°, four pairs of teeth extend to the precession angle of the crankshaft ψ = 55.2°.
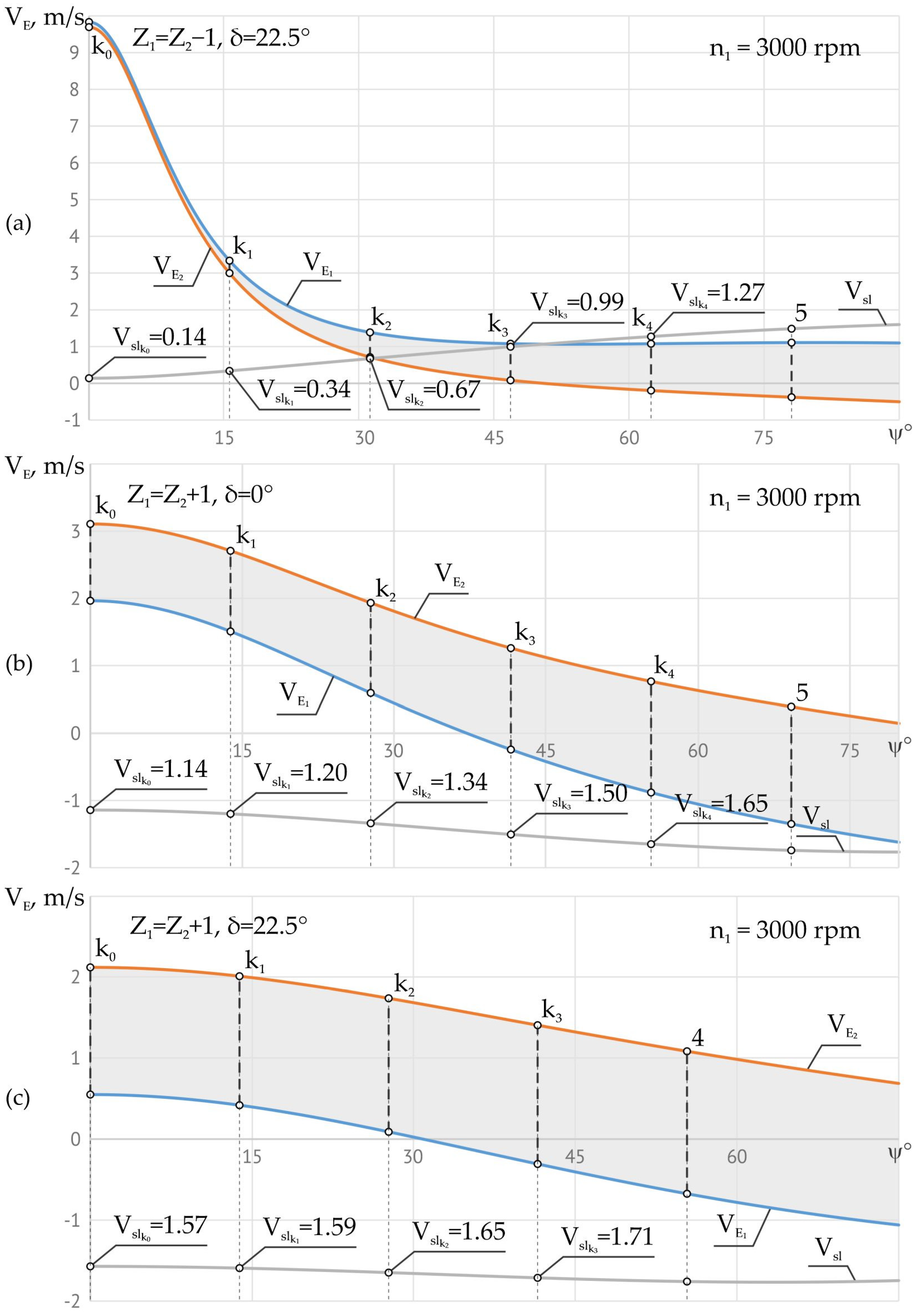
To investigate the energy losses in gearings generated by the relative sliding between the planes of the teeth Vsl, precessional transmissions were designed and manufactured with wheels made of various material couplings, namely, 4041 steel central wheels and PEEK plastic satellite wheels or PEEK plastic central wheels and 4041 steel satellite wheels.
Figure 14a shows the variation in the velocity modules
and
at the contact points E
1 and E
2 on the tooth profile of the satellite wheel and on the profile of the central wheel tooth, respectively, and the sliding velocity V
sl with friction at point E depending on the precession angle ψ for the gearing Z
1 = Z
2 − 1 and δ
(1–2) = 22.5° (Z
1 = 24, Z
2 = 25, θ = 3.5°, r = 6.27 mm, R = 75 mm).
For the case where the crankshaft rotates with the frequency of revolutions n
1 = 3000 rpm, we obtain the linear
and
, and sliding V
sl velocities, as shown in
Figure 14a. The mechanical efficiency of the gear is the expression of the energy losses generated by the sliding friction forces between the conjugated flanks, and the bearing capacity of the convex–concave contact results from the size and the difference in their radii of curvature.
For these reasons, the influence of different parametric configurations [Zg − θ, ±1] on the contact kinematics and geometry was examined, distinguished from each other only by the correlation Z1 = Z2 ± 1 and the angle of the conical axoid δ ≥ 0°.
The analysis of the contact kinematics of the teeth in the gearings [
35] shown in
Figure 14a–c shows that in the gearing corresponding to the parametric configuration [Z
g − θ, −1] with the correlation of the number of teeth Z
1 = Z
2 − 1 and the angle of the conical axoid δ = 22.5° (
Figure 14a), the relative sliding velocity V
sl, in contacts k
0, k
1, k
2, and k
3 is relatively lower, which implies an opportunity to use this gearing in the design of precessional gears with a reducer operation regime. At the same time, the gearing with the configuration [Z
g − θ, +1] and the angle of the conical axoid δ > 0° (
Figure 14b) is recommended to be used in transmissions with a multiplier operation regime and angle of the conical axoid δ = 0° in the reducer, with small transmission ratios contained in the ranges −7.3 ≤ i ≤ −29.3 for δ
(1–2) = 0°, Z
1 = Z
2 + 1 and in the range +8.3 ≤ i ≤ +30.3 for δ
(3–4) = 0° Z
3 = Z
4 + 1.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}