1. Introduction
4D Printing (4DP) is an emerging technology based on the principles of 3D Printing (3DP), with time being introduced as the fourth dimension [
1]. It involves the creation of objects that change their shape or properties over time in response to external stimuli such as temperature, light, moisture, etc. [
2]. This approach allows for the fabrication of complex, stimuli-responsive structures with applications across various fields, including tissue and organ regeneration, smart materials, and dynamic structures [
3]. The technology uses shape memory polymers and composites that can undergo programmed transformations, offering innovative solutions for customizable and adaptive objects. Shape memory materials belong to a class of materials that can return to the original shape after temporary deformation conducted in a programming phase, with the permanent shape encoded during the manufacturing phase [
1,
4]. This ability, known as the shape memory effect (SME), is exhibited by some metals, hydrogels, or elastomers [
1] and by polymers like polylactic acid (PLA) or polycaprolactone (PCL) [
5] used as feedstock in the 3DP process based on material extrusion (MEX). In this study, PLA was chosen as the material for study because it is the most commonly used in 3DP, which also has shape memory properties.
Originating in 2013 [
6], 4DP is still in its early stages, and more knowledge is required for optimally tuning the 3DP process parameters and print design to achieve the required functional specifications. 4D prints can be programmed into different shapes varying from basic ones to complex ones consisting of sequences of basic deformations, which take place in time [
7].
3DP brings a new level of complexity to the shape memory objects as the SME depends not only on the polymer properties, set deformation and recovery temperatures (Td—temperature applied to the material in the programming/fixation phase and Tr—temperature applied to the material in the recovery step), or applied deformation strain but also on their anisotropic macrostructure, i.e., on their printing parameters.
It is well known that 3DP is a multi-variable process. Prints can be manufactured with different layer thicknesses, infill densities, patterns, printing speeds, etc., and these process parameters influence how the SME is exhibited by the print. Kacergis et al. [
8] studied the influence of bed temperature, printing speed, and number of active layers on shape memory performances of hinge-like structures made of PLA and TPU (thermoplastic polyurethane), activated in hot water (85 °C). The deformations and recoveries were assessed using an optical 3D digitizer, and the strain of the exterior surface of specimens was measured. The results showed that the first two aforementioned parameters have a significant influence on SMEs: the cooler the build platform and the faster the printing, the higher the deformation is. In their study, Wu et al. [
9] investigated the impact of several parameters such as layer thickness, raster angle, T
d, and T
r on the shape-recovery ratio of 3D-printed PLA. Their analysis was conducted using an orthogonal experimental design, with the outcomes showing that T
r had the most important influence on the maximum recovery rate while the layer thickness had the least effect. The results indicated that SME is dependent more on T
r than T
d, parameter settings, or process parameters. Ehrmann et al. studied the recovery of 3D–printed PLA with diverse infill patterns and densities [
10], as well as the influence of the applied pressure direction on shape memory properties based on quasi-static load tests [
11]. Nam et al. investigated the effect of pattern, infill density, and T
r over the bending recovery and shape–recovery speed of 3DP parts [
7]. The samples with 20% infill density and line pattern showed the worst recovery results, while 100% infill density samples provided the best recovery performances. Graphical tables and a bending recovery toolkit are proposed to ease the designers’ choice of process parameters to set to achieve the desired SME.
There are also studies that have investigated aspects related to the dimensional accuracy of 3D-printed objects using PLA [
12,
13], which can be extended to the context of 4DP due to overlapping aspects related to material behavior and 3DP technology. However, specific references addressing dimensional accuracy issues in 4D–printed PLA objects are lacking, as the literature does not explicitly address thermomechanical simulations of the 4DP process for PLA. In this study, the holes in the objects were created through direct 3D printing, not by drilling. While drilled holes tend to be more precise, drilling through the prints disrupts the top and bottom layers, as well as the infill structure. This allows the hot water, used as a trigger for the shape memory effect, to infiltrate the print unpredictably, thereby compromising the control over experimental outcomes.
Several metrics are used in the field for evaluating the 4DP recovery process: the recovery rate, recovery time, strain fixity rate, and recovery force [
14]. Although these metrics are interconnected, contributing to the complexity of the process and the difficulty of developing and controlling the applications, they can be categorized as related to several factors: 3D print design–related (such as part thickness and geometrical features), material properties–related (including glass transition temperature and deformation temperature), 3DP process parameters-related (such as infills, layer thickness, printing speed, printing temperature, and bed temperature [
3,
7,
15]), programming–related (such as applied stress/load and programmed shape, such as folding, bending, rolling, curling, etc.), and trigger/stimulus mechanisms–related (chemical, physical, and biological) [
16,
17].
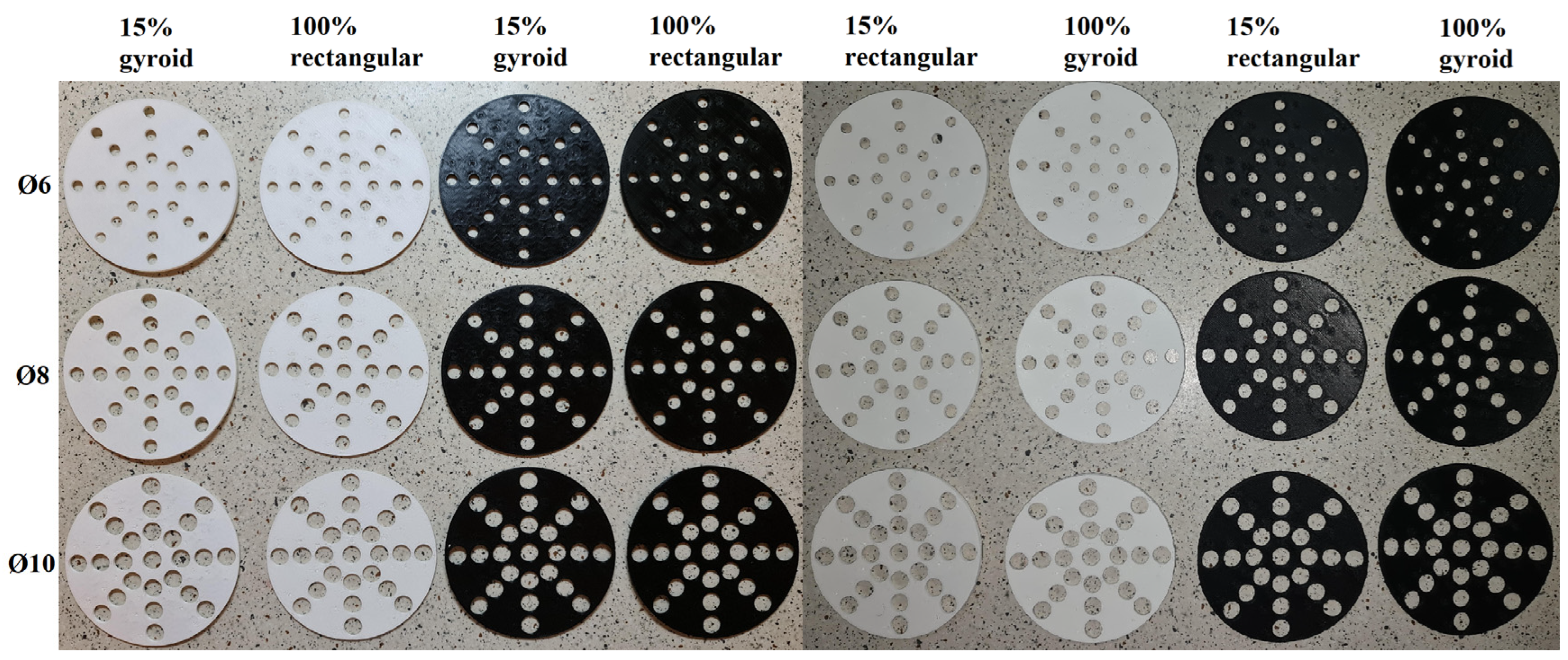
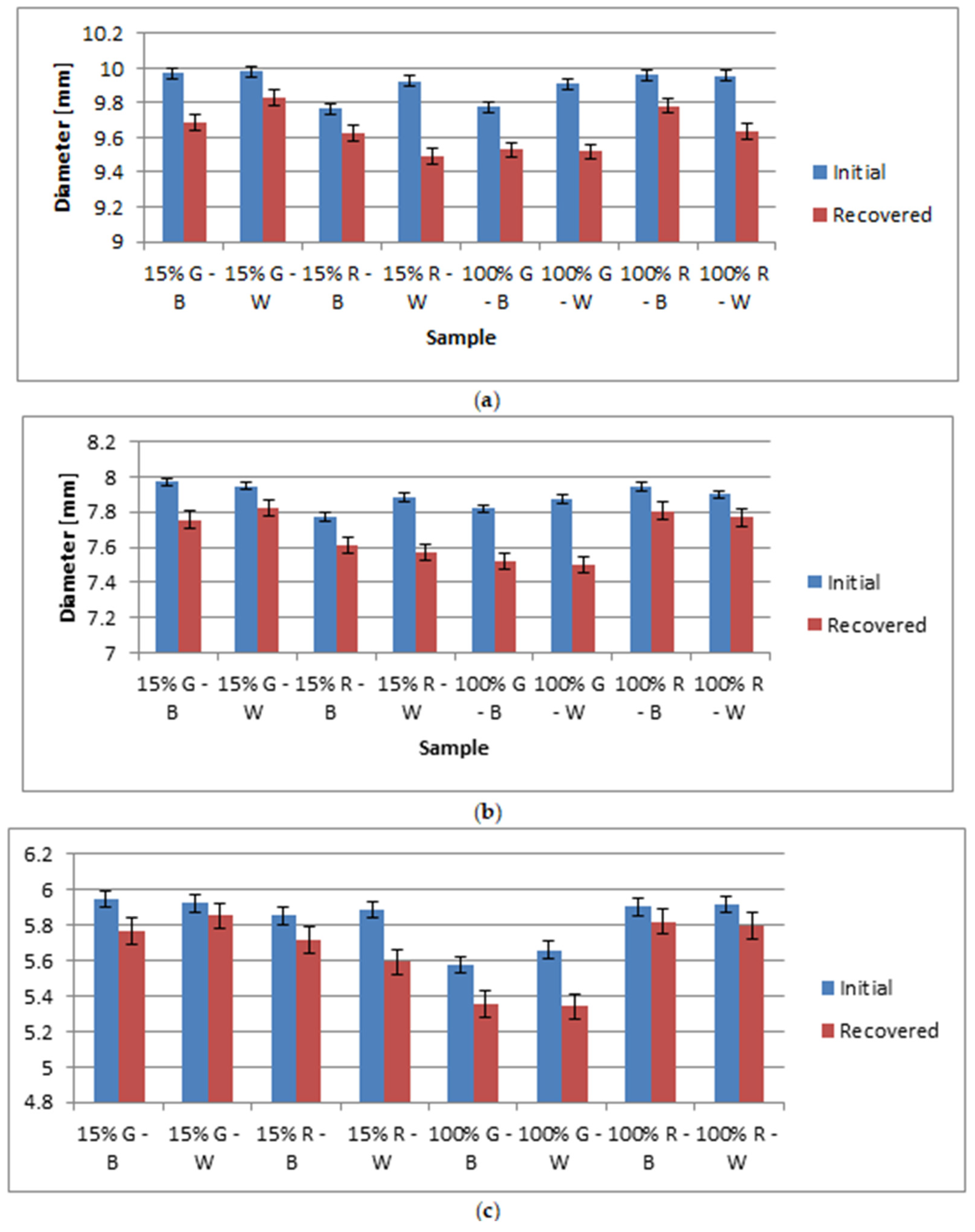
In this research, accuracy was proposed as a new indicator for evaluating the dimensional error in 4D-printed recovered prints with holes produced using the MEX process. Recovery time was measured for each sample to evaluate the impact of process parameters on this indicator. Several other contributions can also be mentioned. The influence of filament color, infill density, and infill pattern on the dimensional accuracy of 4D-printed objects featuring holes of varying diameters after undergoing a heat-induced recovery process was systematically explored. The impact of these parameters was assessed by comparatively analyzing the diameters before and after recovery for 3D prints with open holes of 6 mm, 8 mm, and 10 mm. The results showed an increased variability in diameters post-recovery, but no significant differences among the parameters could be noted. Additionally, it was observed that higher infill densities improved shape retention. A quasi-static finite element analysis model incorporating temperature-dependent material characteristics was proposed to predict the mechanical behavior and strain near the holes, with the results aiming to be correlated with the observed dimensional accuracy. Nodal displacements were defined according to the deformed shape, and the correlation was established between the observed strains and the post-recovery dimensional accuracy of the specimens. This research relevance is for applications requiring the conservation of hole design features through the selection of material and printing settings. In this sense, a case study of a two-sieve setup was developed and discussed to show the potential for broader uses of 4D-printed PLA beyond typical origami–like structures.
Theoretical Considerations on 4DP Process
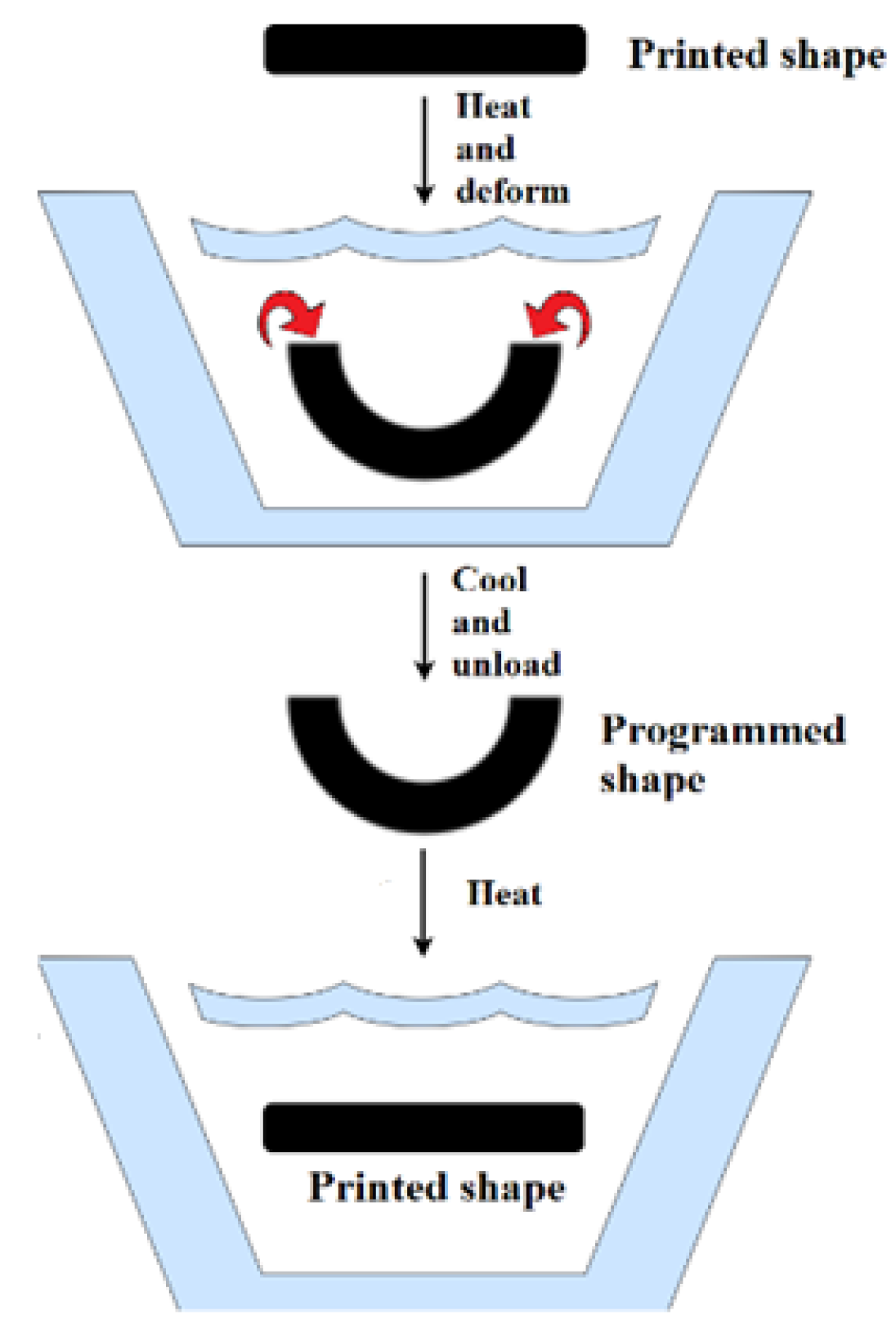
A schematic representation of a typical one–way SME using heat (hot water) as an external trigger is presented in
Figure 1. The material is brought to a temperature at which the polymer chains become flexible and can withstand deformation (T
d > T
g, T
g—glass transition temperature), deformed into a temporary shape under a mechanical load, and then cooled down in a temporary shape–phase known as fixation or programming. The recovery phase does not need the application of a load as the process is triggered when the 3D print is heated at T
r > T
g. Thus, two temperatures can be defined for each cycle: T
d and T
r, which do not necessarily have the same value, while T
g is dependent on the material.
4DP involves the interaction of thermal and mechanical factors, necessitating a multiphysics simulation environment due to the time-dependent nature of the process. The thermal effects, determined by heat from external sources, lead to a temperature increase above T
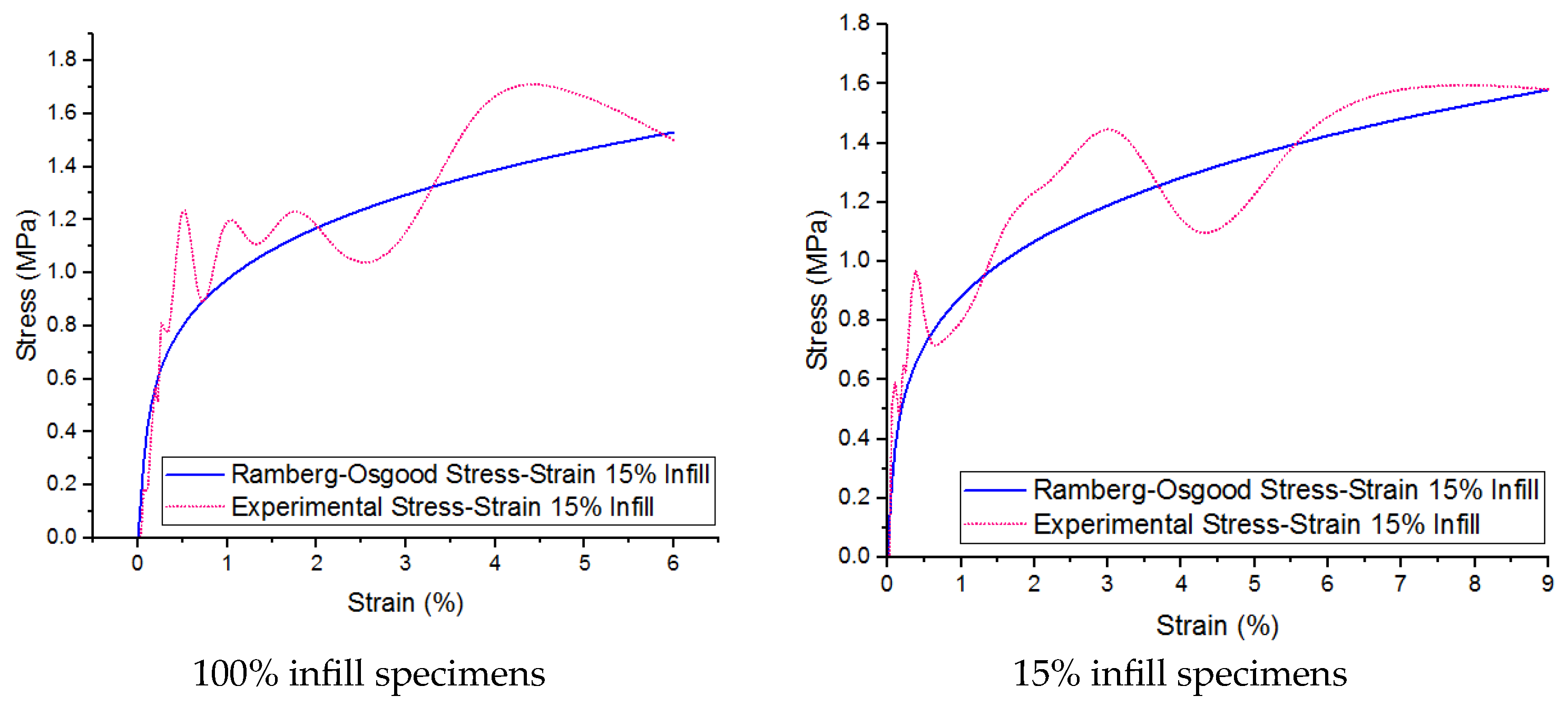
g, with convection and conduction mechanisms driving heat transfer. These thermal changes influence the mechanical properties of PLA [
10,
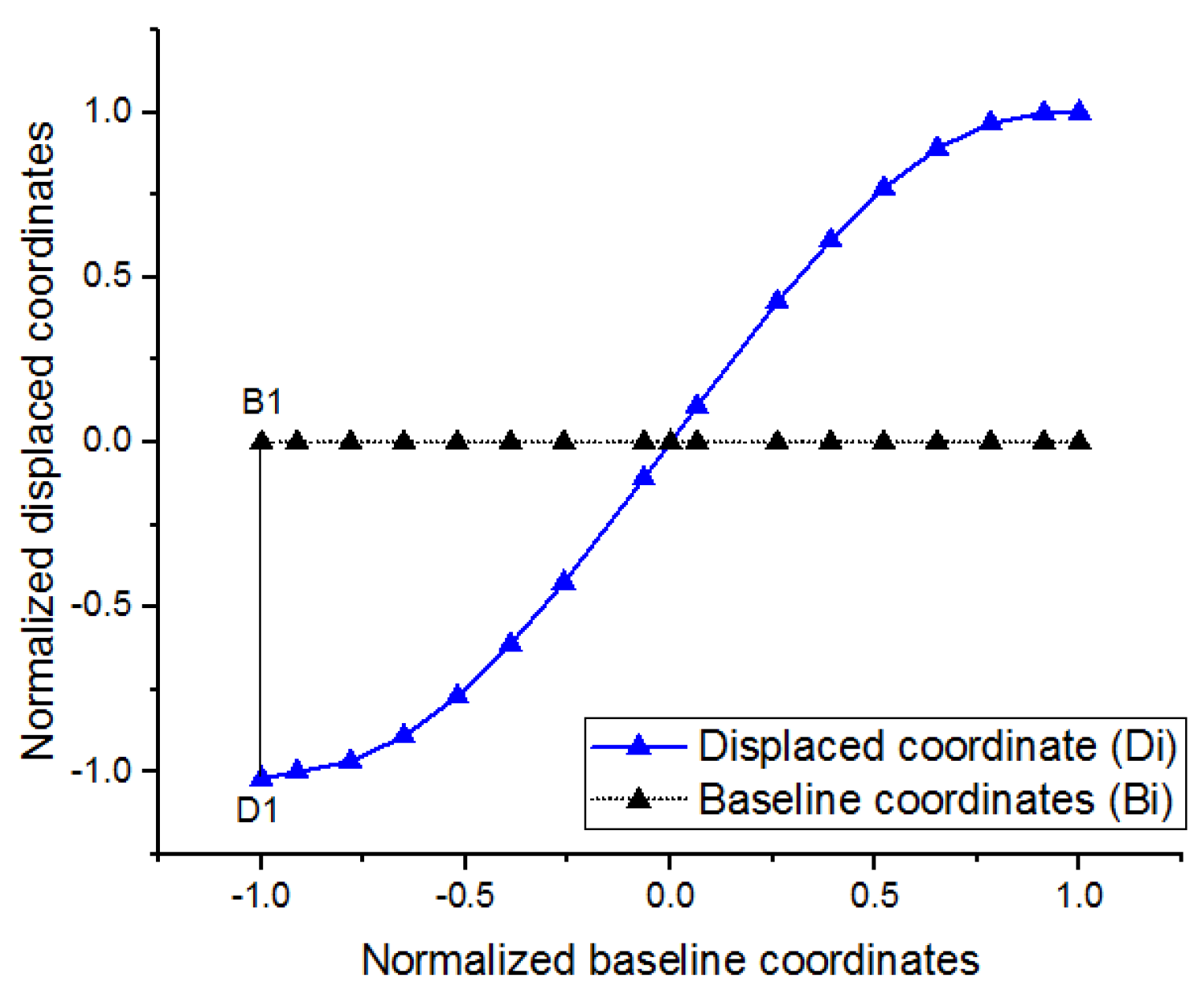
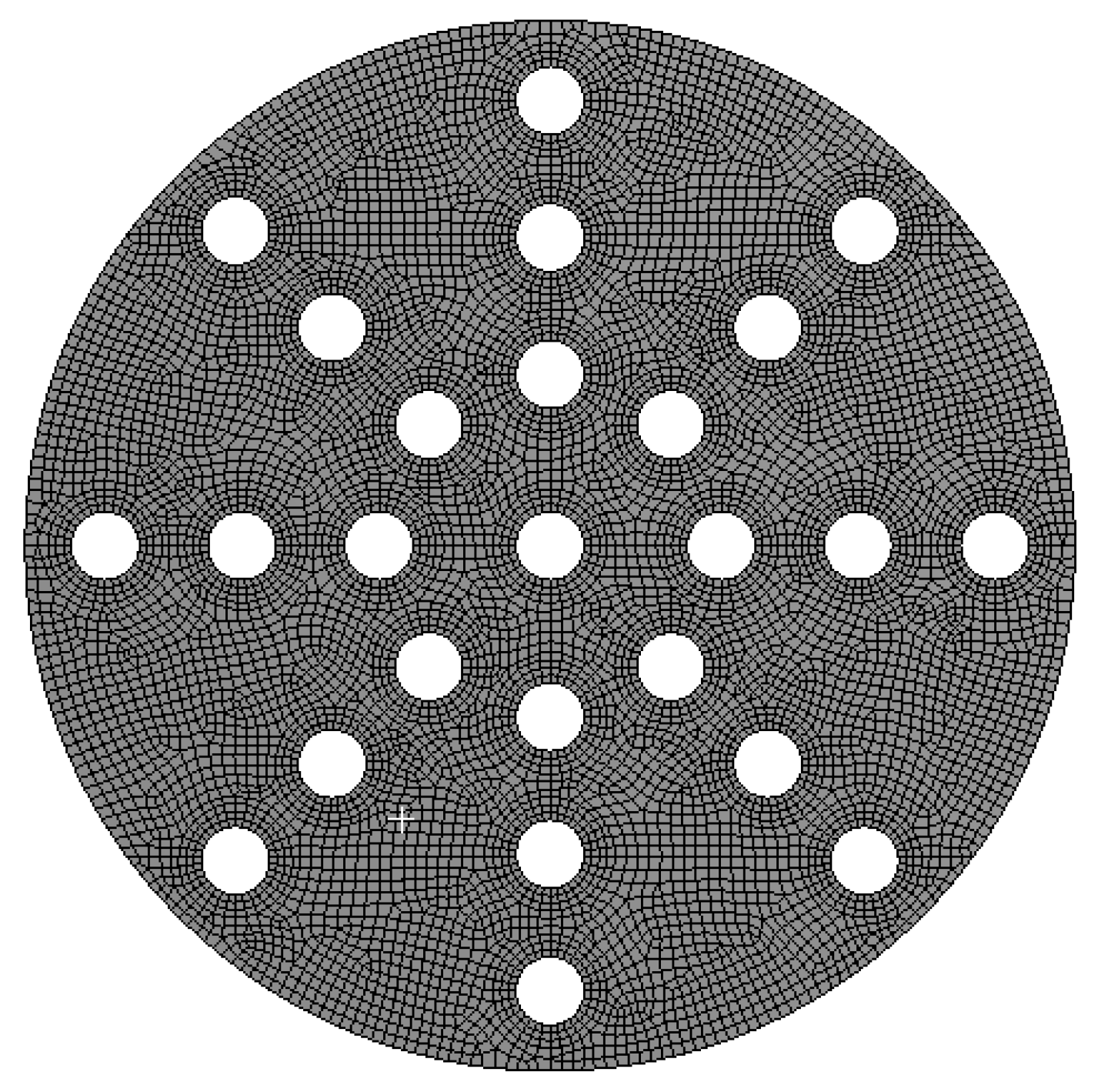
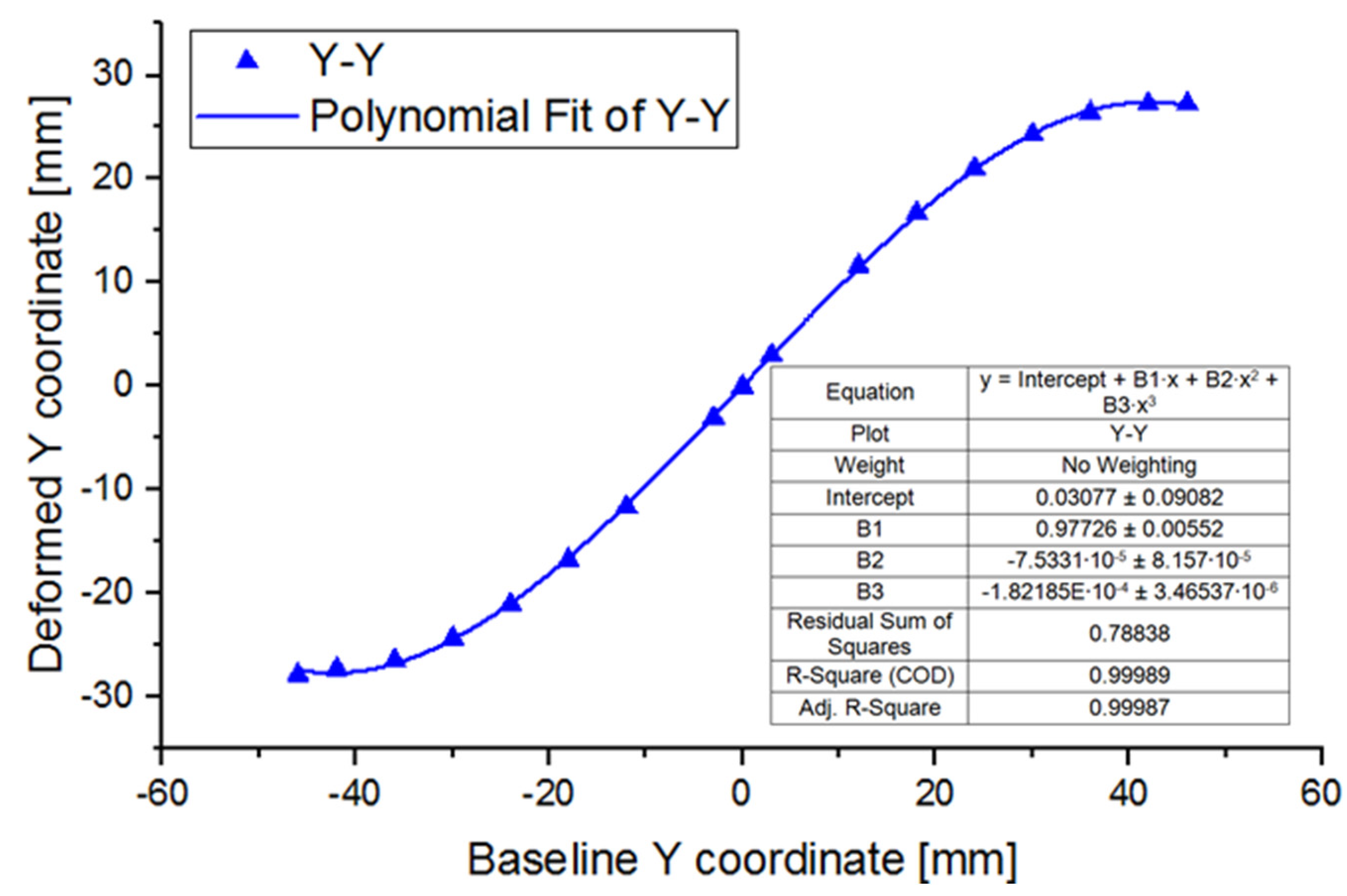
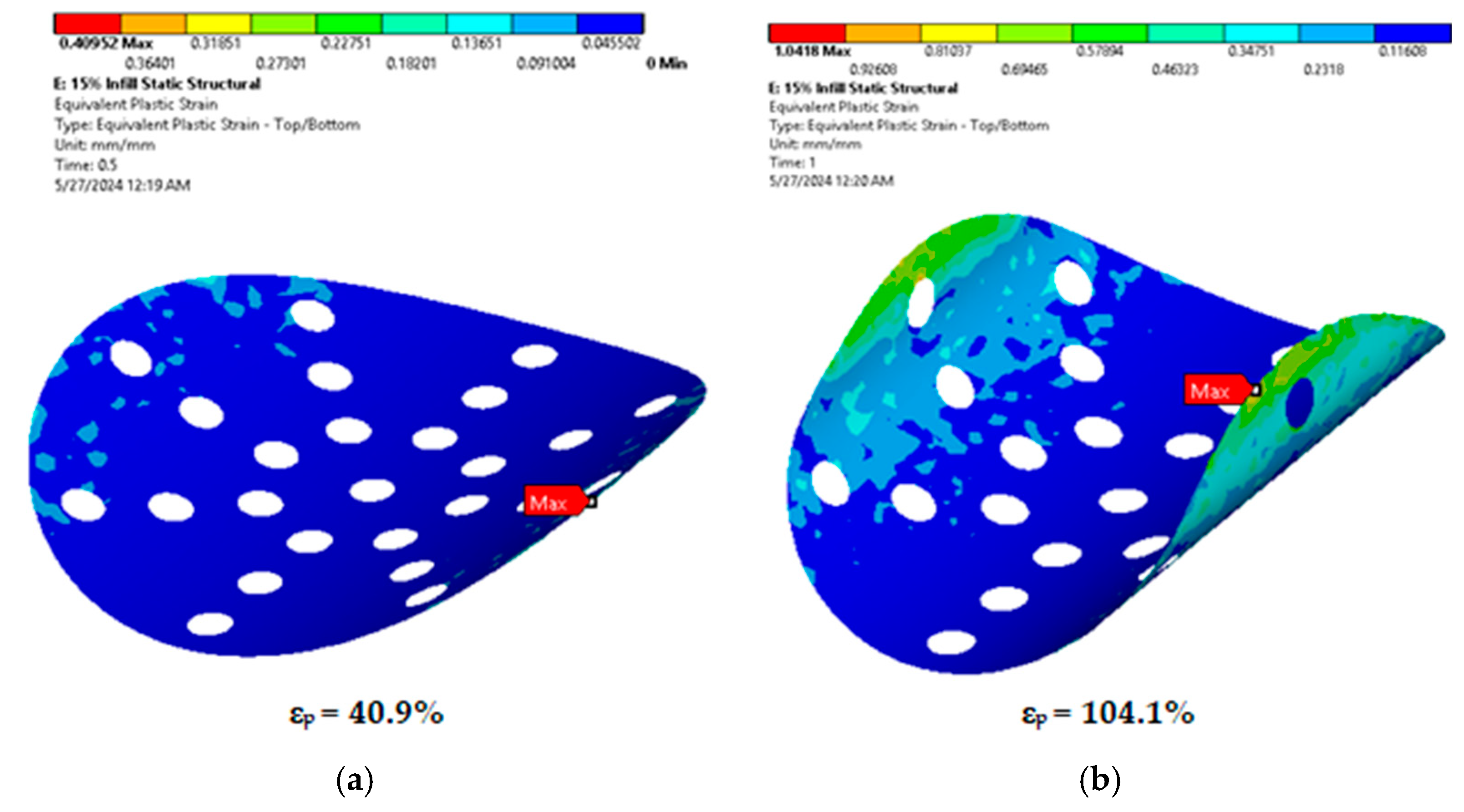
16], especially Young’s modulus and the tensile yield strength. Thermal expansion induces dimensional changes, impacting mechanical stability, which is accounted for in structural analysis through temperature-dependent material properties and the coefficient of thermal expansion (CTE). The inertial effects and damping are typically negligible compared to stiffness forces due to the quasi-static loading conditions. In this context, the mapping of nodal displacement is essential for capturing specimens’ deformation, with temperature changes influencing material characteristics and thus mechanical strain. Based on the nodal displacement rule from
Figure 2, each node moves from its original position to a displaced one. The resulting force reactions contribute to the overall mechanical strain of the model. This behavior can be used to capture the locations in which the maximum shape change occurs for further correlation with the experimental data.
4. Case Study
To demonstrate the practical use of 4DP samples with open–hole features and emphasize the significance of knowing their post–recovery accuracy, a case study was conducted. A two–step filtering device for small spherical objects in the shape of a bottle was designed; in practical applications, other shapes of separation filters with multiple sieves, intakes, and outtakes could be also considered.
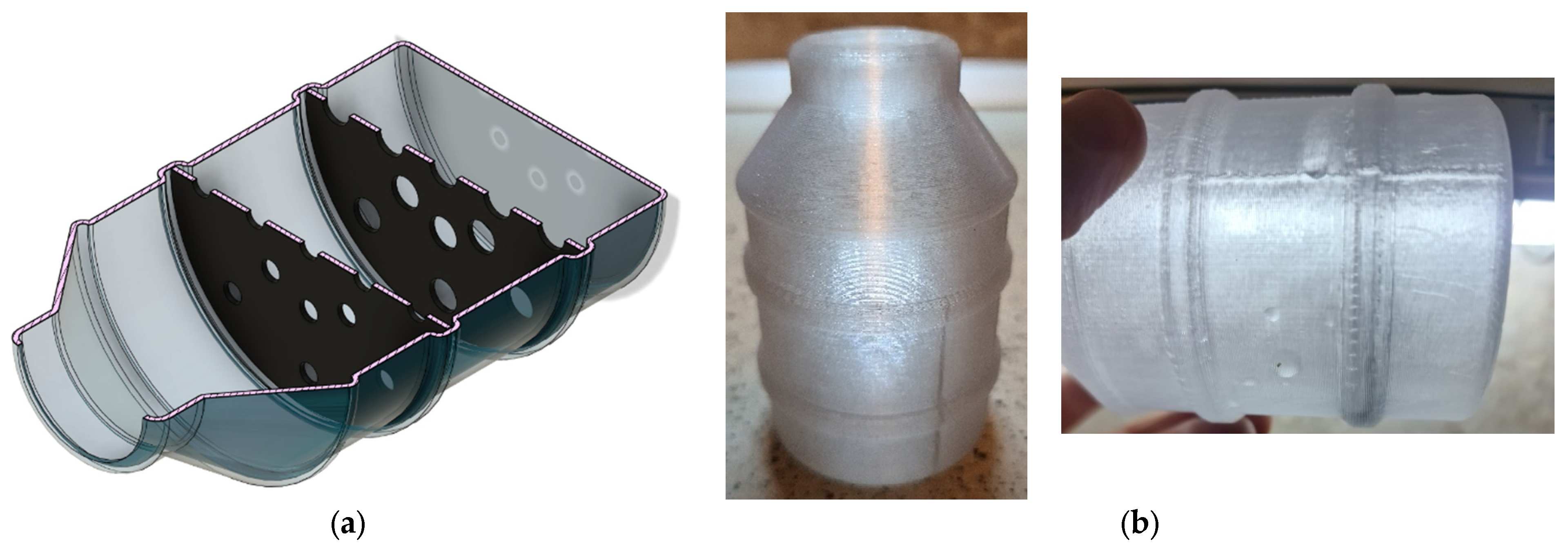
A cross–sectional view of the bottles is presented in
Figure 18a, while
Figure 18b shows the bottle made by 3DP using transparent PETG (polyethylene terephthalate glycol). PETG was selected because it has a higher glass–transition temperature than PLA, which ensures it is not affected by the water temperature used as a trigger. Additionally, it can be transparently 3D printed to allow visibility of the sieves’ positions.
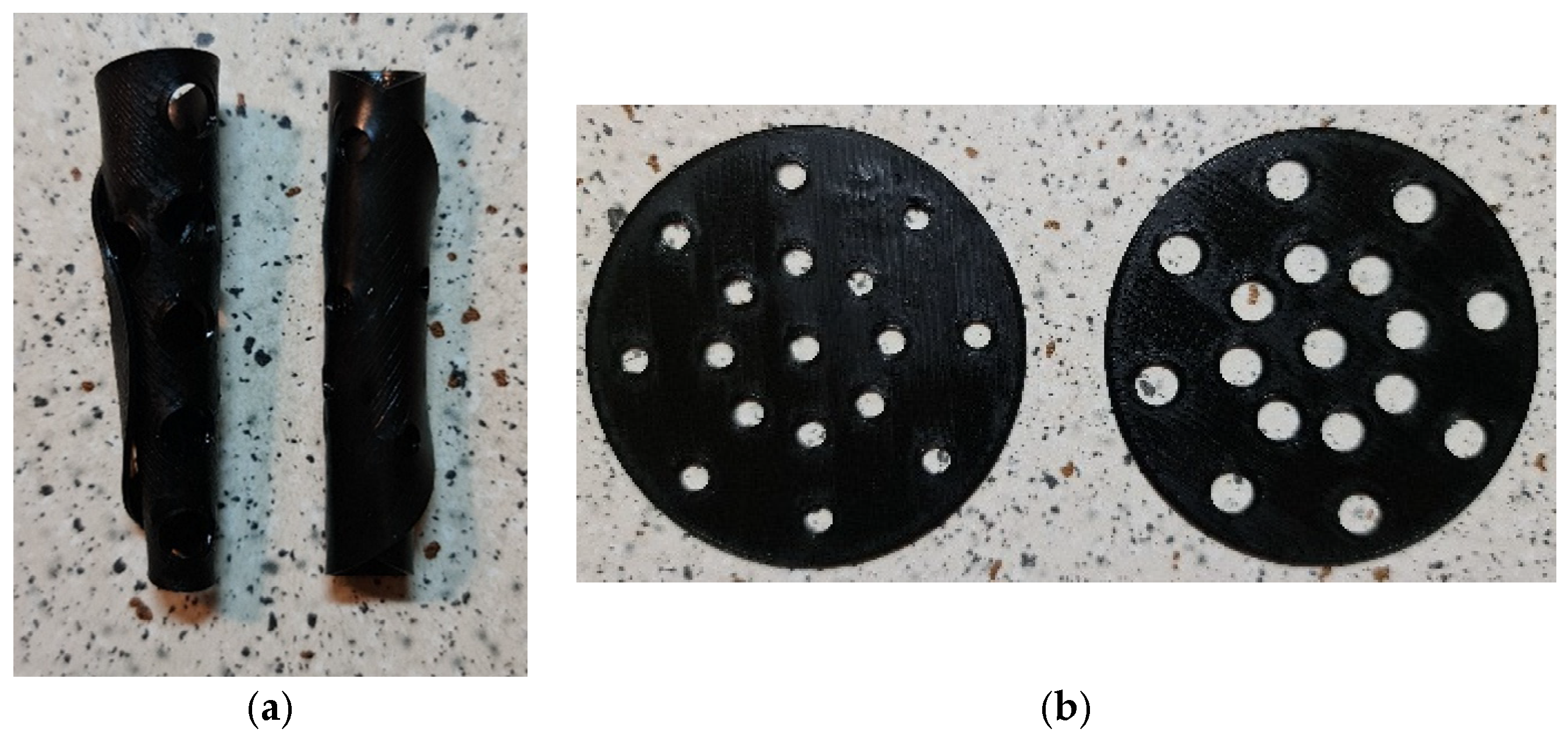
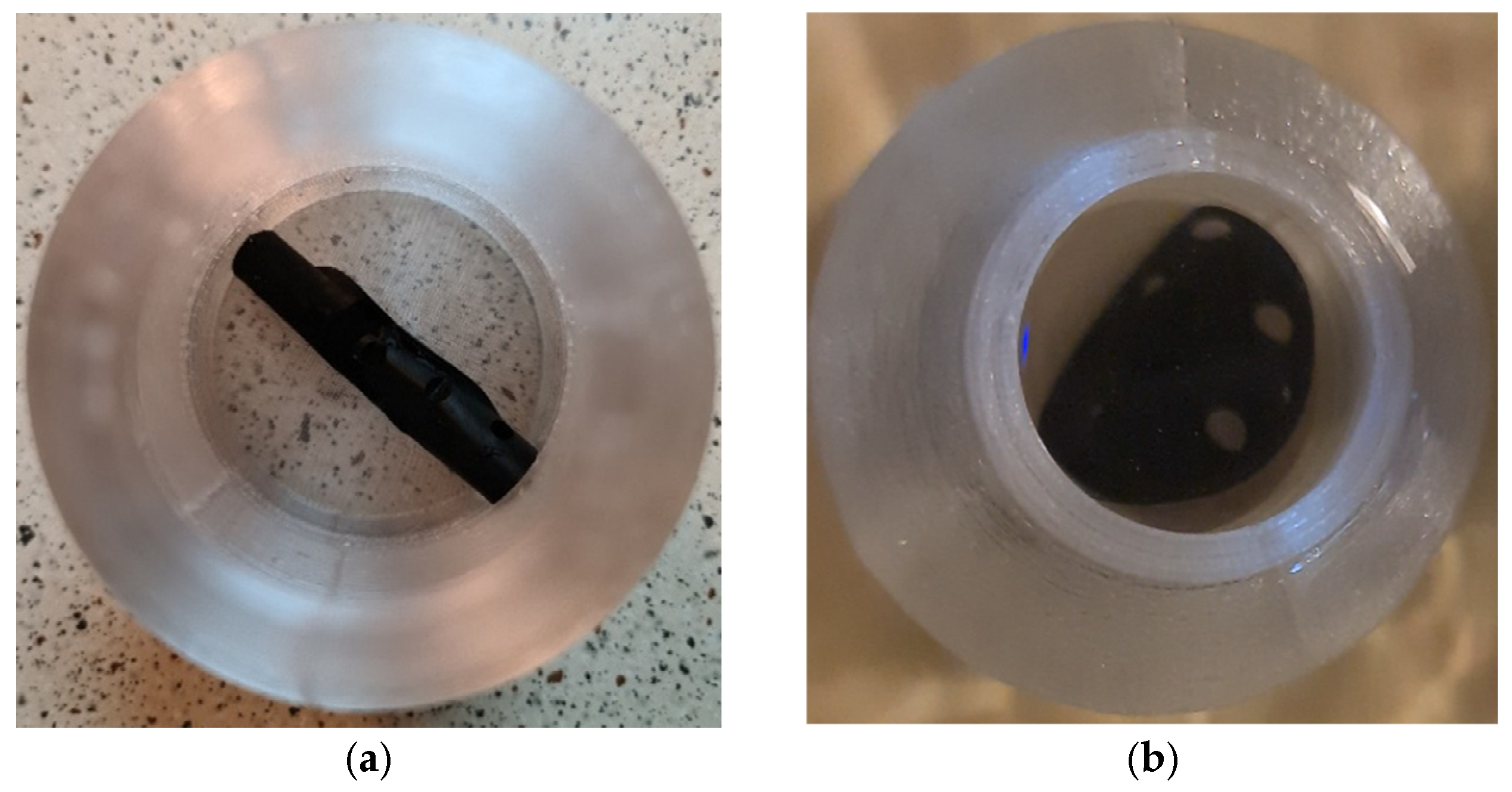
The bottle is 2 mm thick and features two circular grooves designed to accommodate the sieves, which are rolled and inserted through the small diameter intake (as shown in
Figure 19a). The sieves are 1 mm thick and contain holes with diameters of 4 mm and 6 mm (as shown in
Figure 19b), and were 3D printed from the black filament at 100% rectangular infill based on the research results that showed this density ensures the best recovery. The sieves are intended to filter and separate spheres with diameters of 3–3.6 mm and 5–5.5 mm. They were submerged in 60 °C hot water and rolled so that they could be placed inside the transparent bottle. Once the samples were inside the bottle, hot water was added to the bottle, determining the samples to start the recovery process and return to their disk–like shape in the zones where the grooves were located (
Figure 20).
5. Conclusions and Further Research
The study evaluated the effect of filament color, infill density, and pattern on the dimensional accuracy and recovery behavior of 4D–printed PLA objects with holes by integrating experimental testing and numerical modeling. Also, another important novelty of this study was to establish a correlation between the mechanical strains and the dimensional accuracy post–recovery using numerical simulations, with existing research focusing on other factors like recovery time or shape.
The main findings of this study can be summarized as follows:
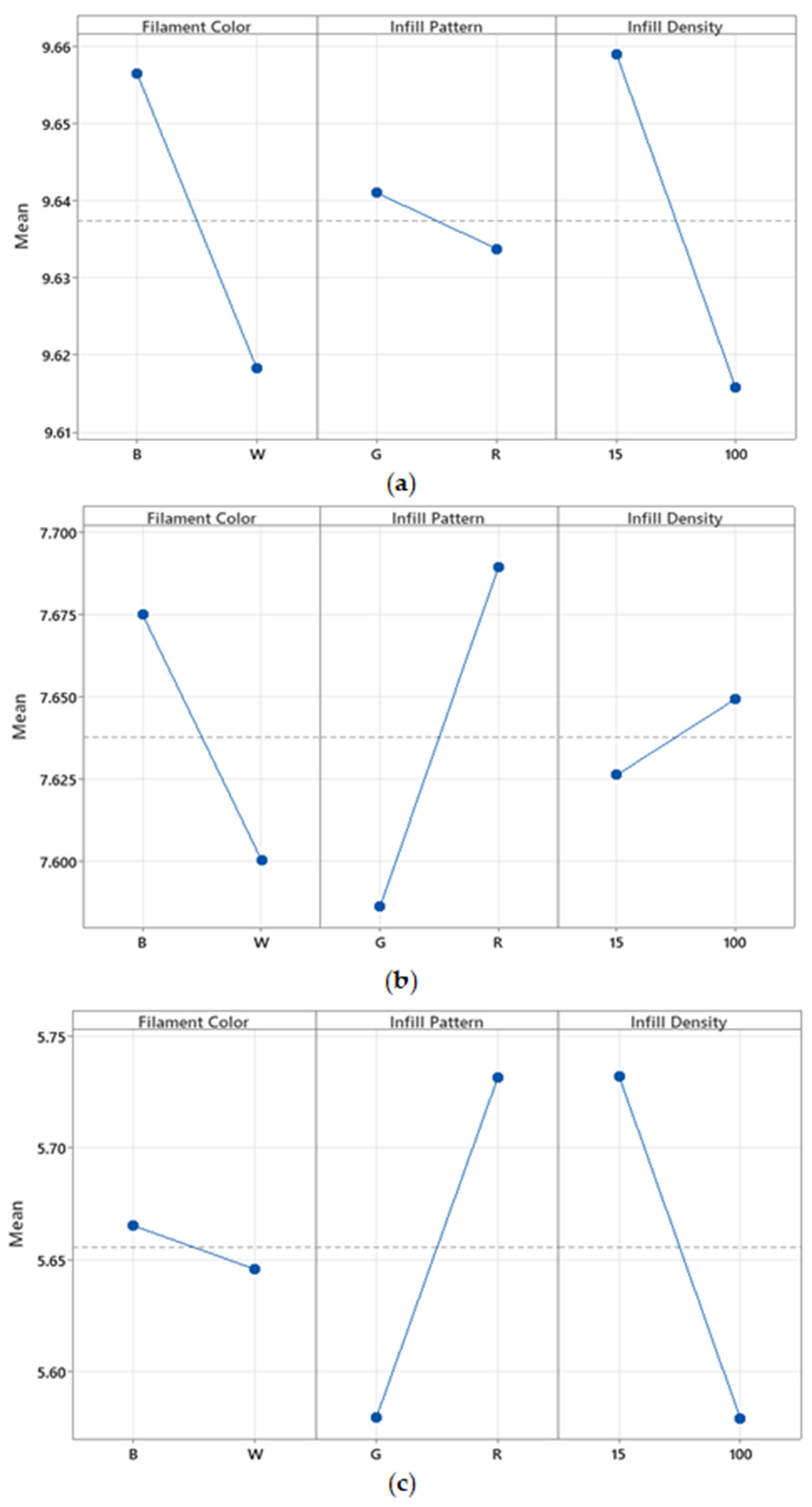
Infill density influences the shape retention and recovery accuracy, with 100% infill density ensuring better shape retention than the much lower density of 15%.
In contrast to initial hypotheses, filament color and infill pattern had no significant impact on post–recovery dimensional accuracy, meaning that the recovery characteristics are more strongly influenced by structural characteristics rather than filament color–related properties or the micro–architecture of the infill.
Numerical simulations using a quasi–static analysis mode and temperature–dependent material properties allowed the prediction of the mechanical behavior around the holes.
The practical application of these research results was demonstrated through a case study involving a two–sieve filtering device, using the findings on parameter influences to achieve functional requirements.
Further work will be focused on extending the range of tested parameters, particularly exploring different PLA composites and infill configurations. Additionally, the impact of recovery temperatures and heating time application will be studied to optimize the process for practical settings, alongside the long–term stability of the recovered shapes under cyclic thermal stresses.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}