

Preliminary Sizing of Electric-Propulsion Powertrains for Concept Aircraft Designs



Abstract
1. Introduction
1.1. Background
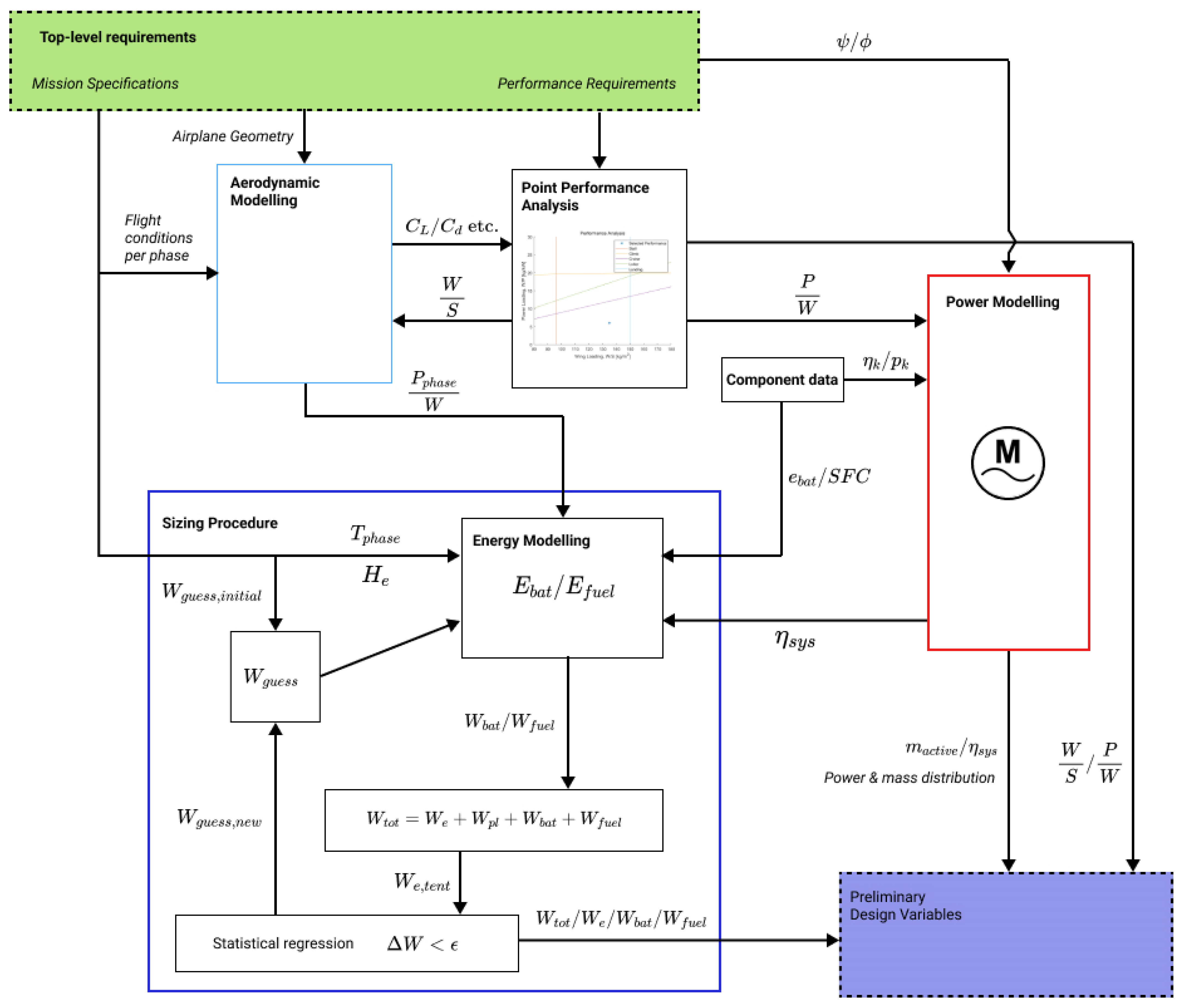
1.2. Methodology
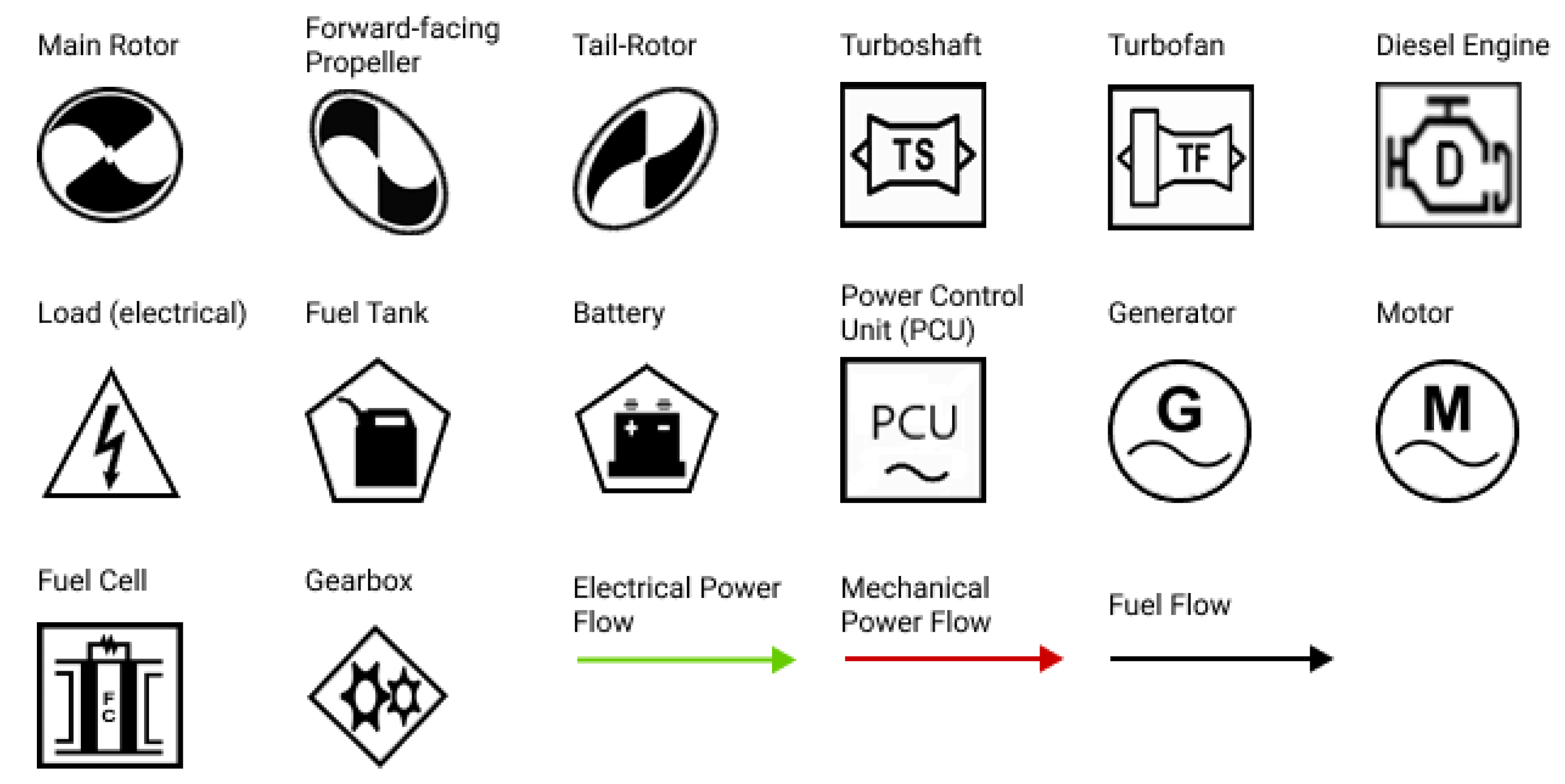
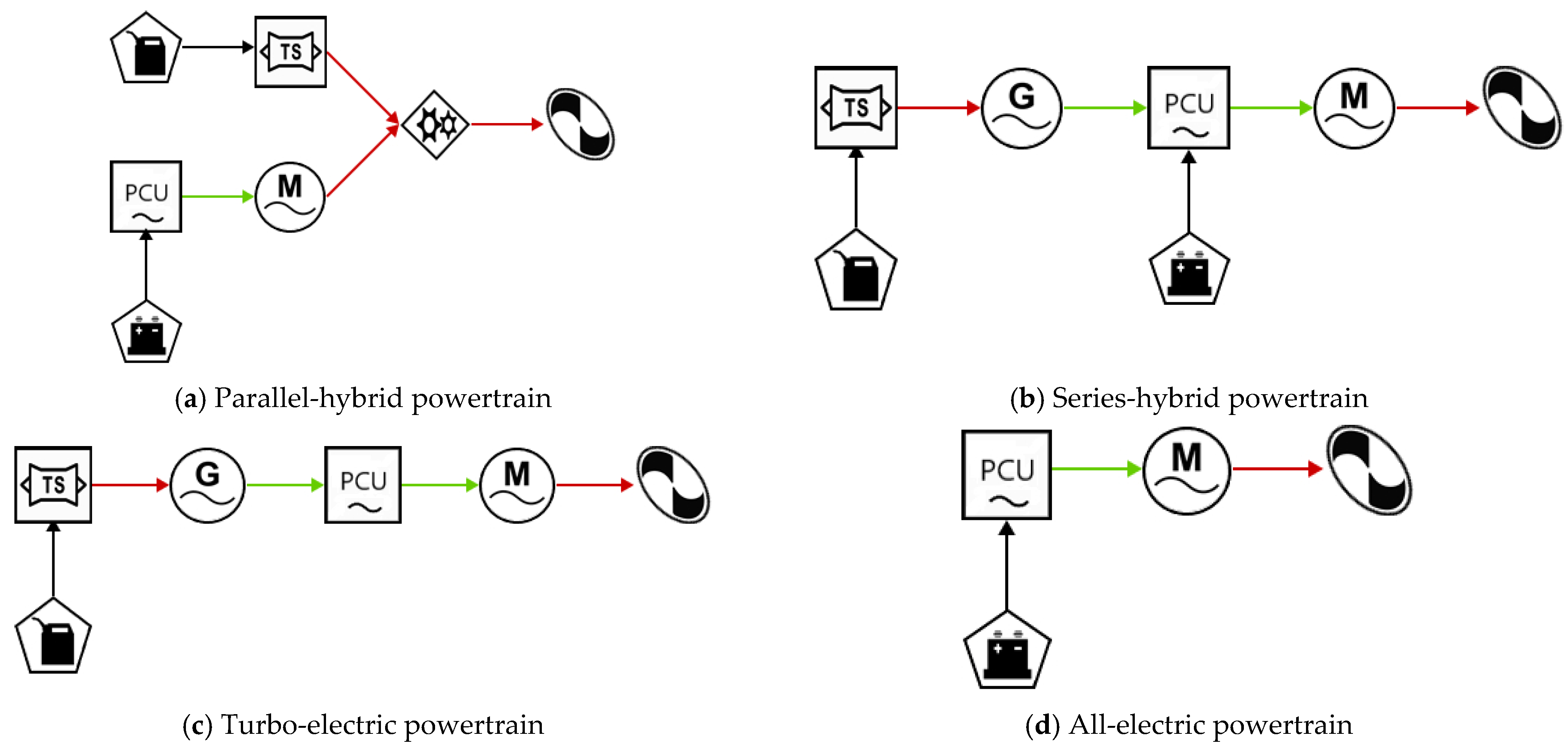
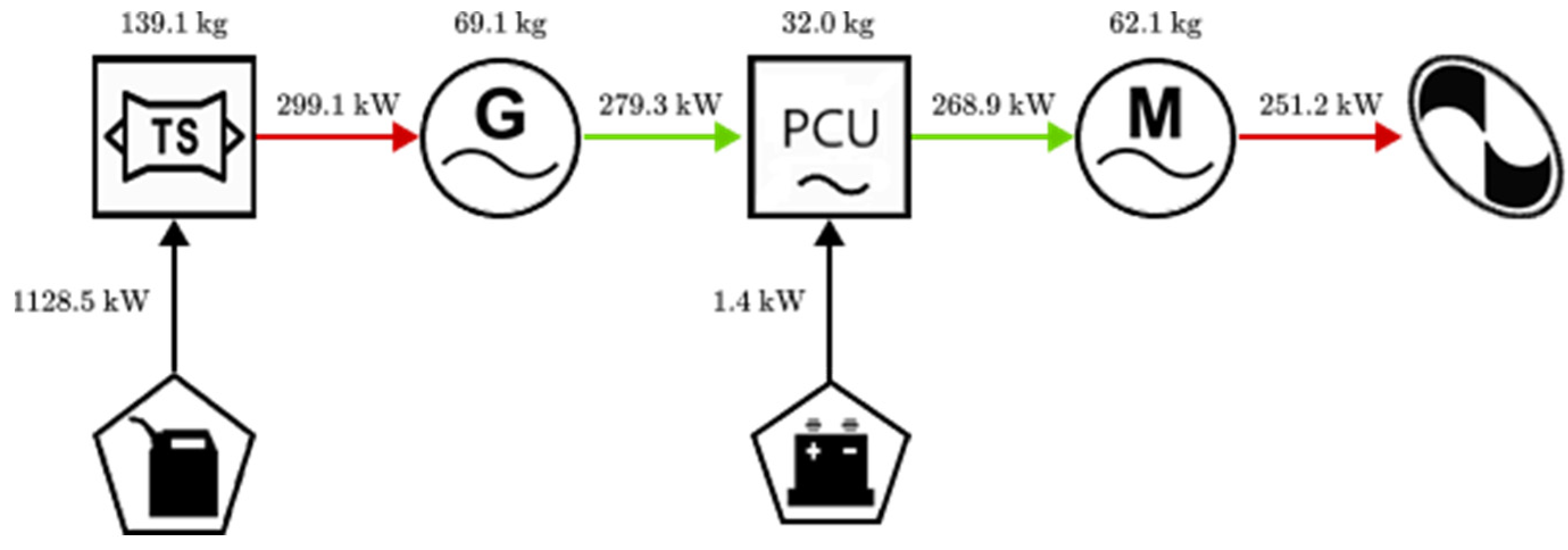
2. Powertrain Modelling
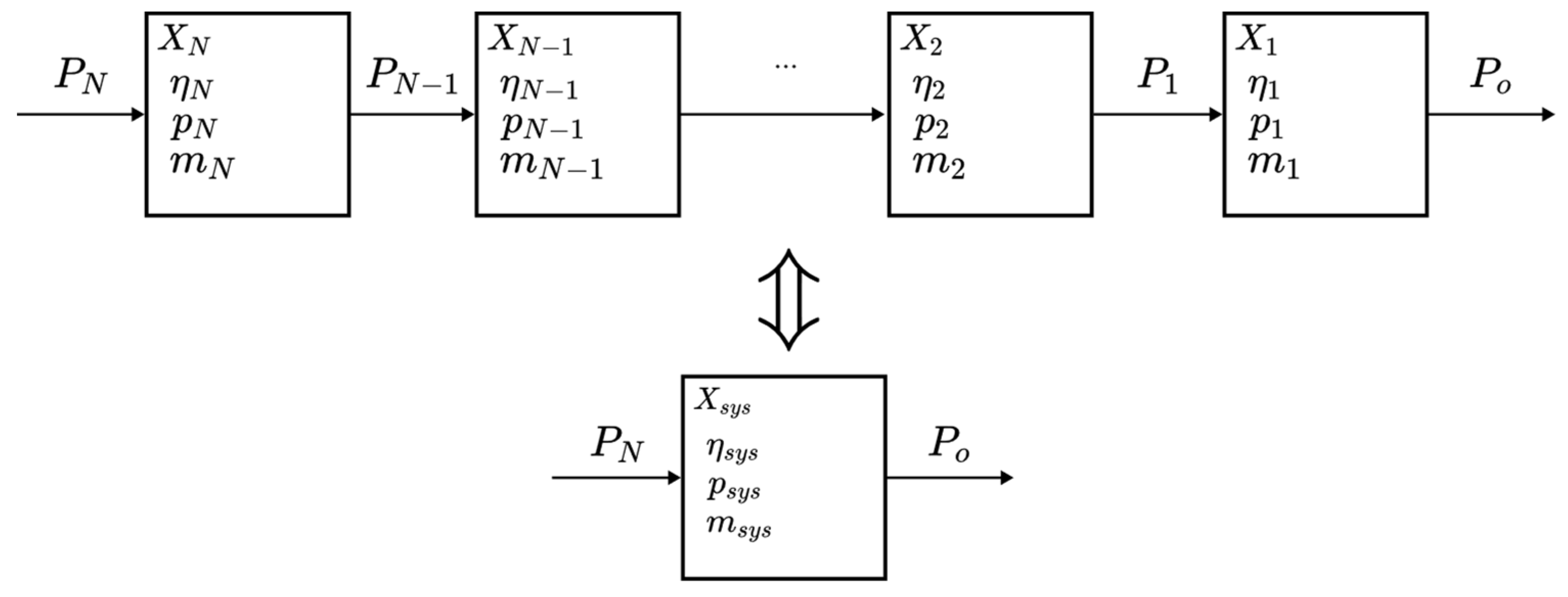
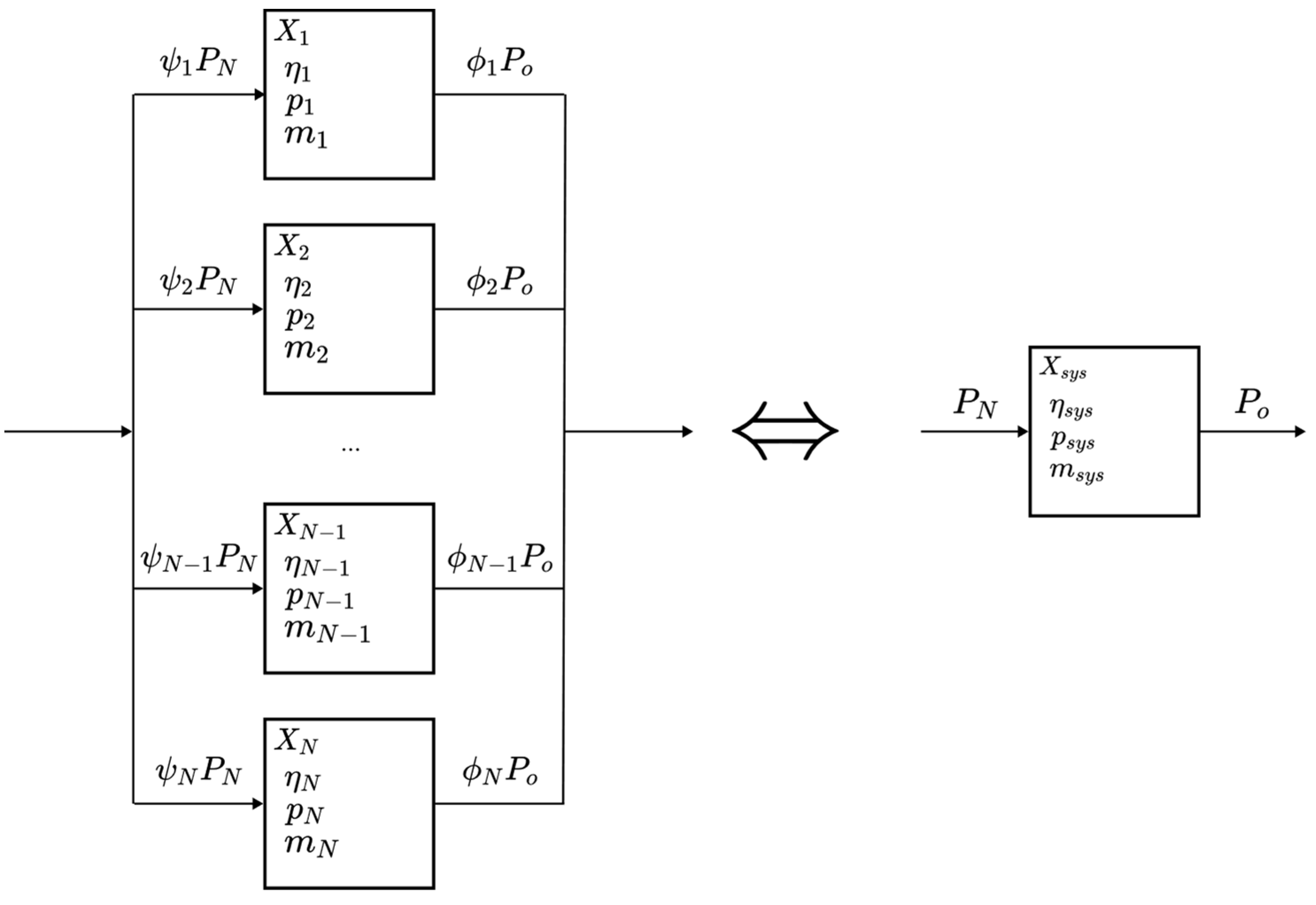
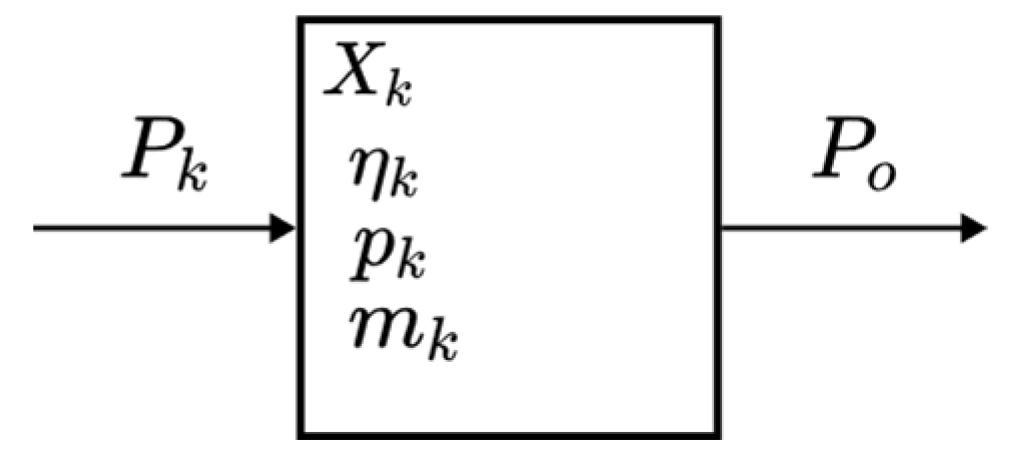
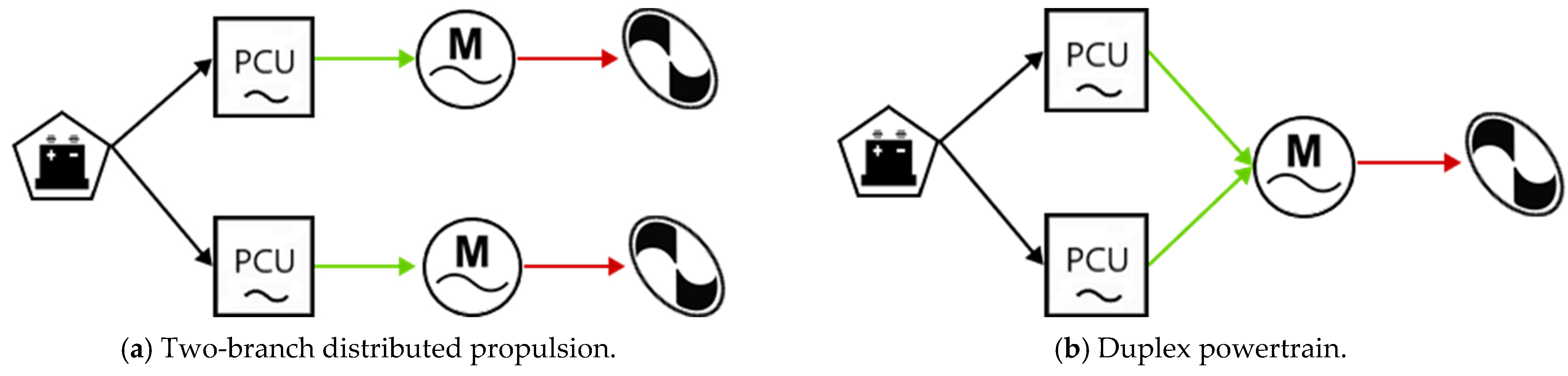
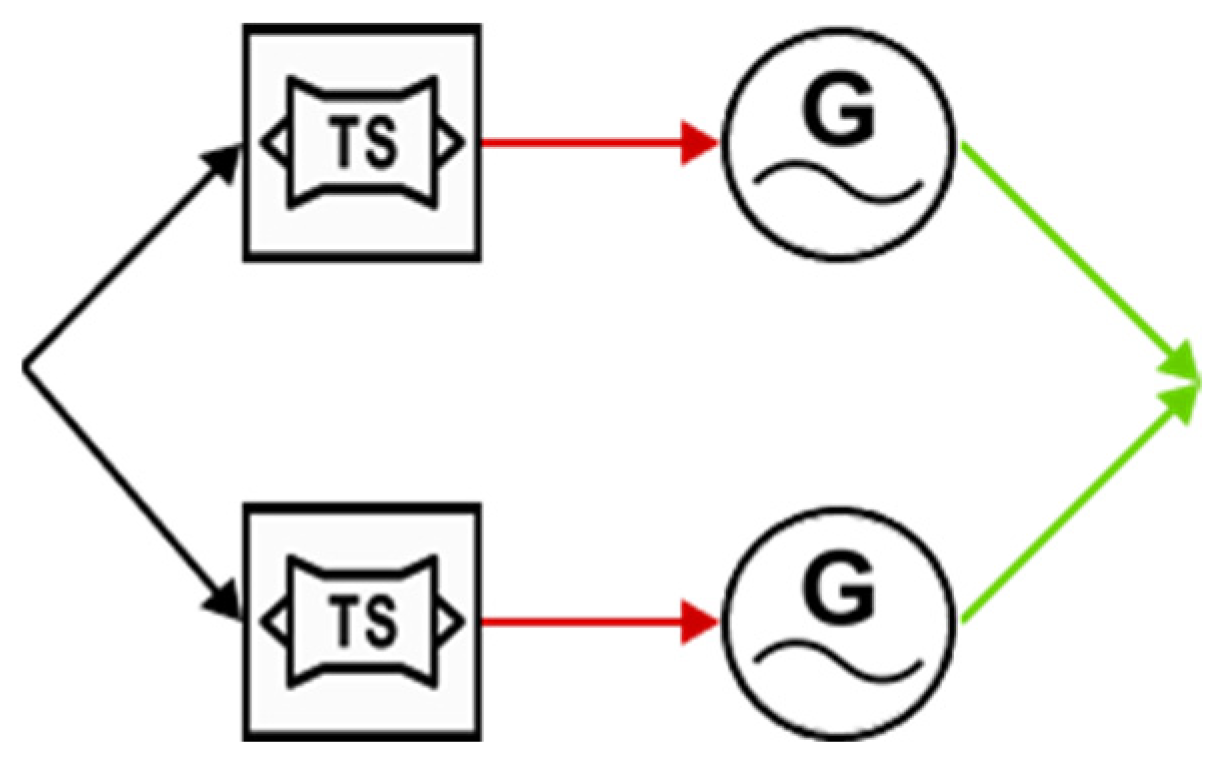
2.1. Series and Parallel Connections
2.2. State-of-the-Art Component Values
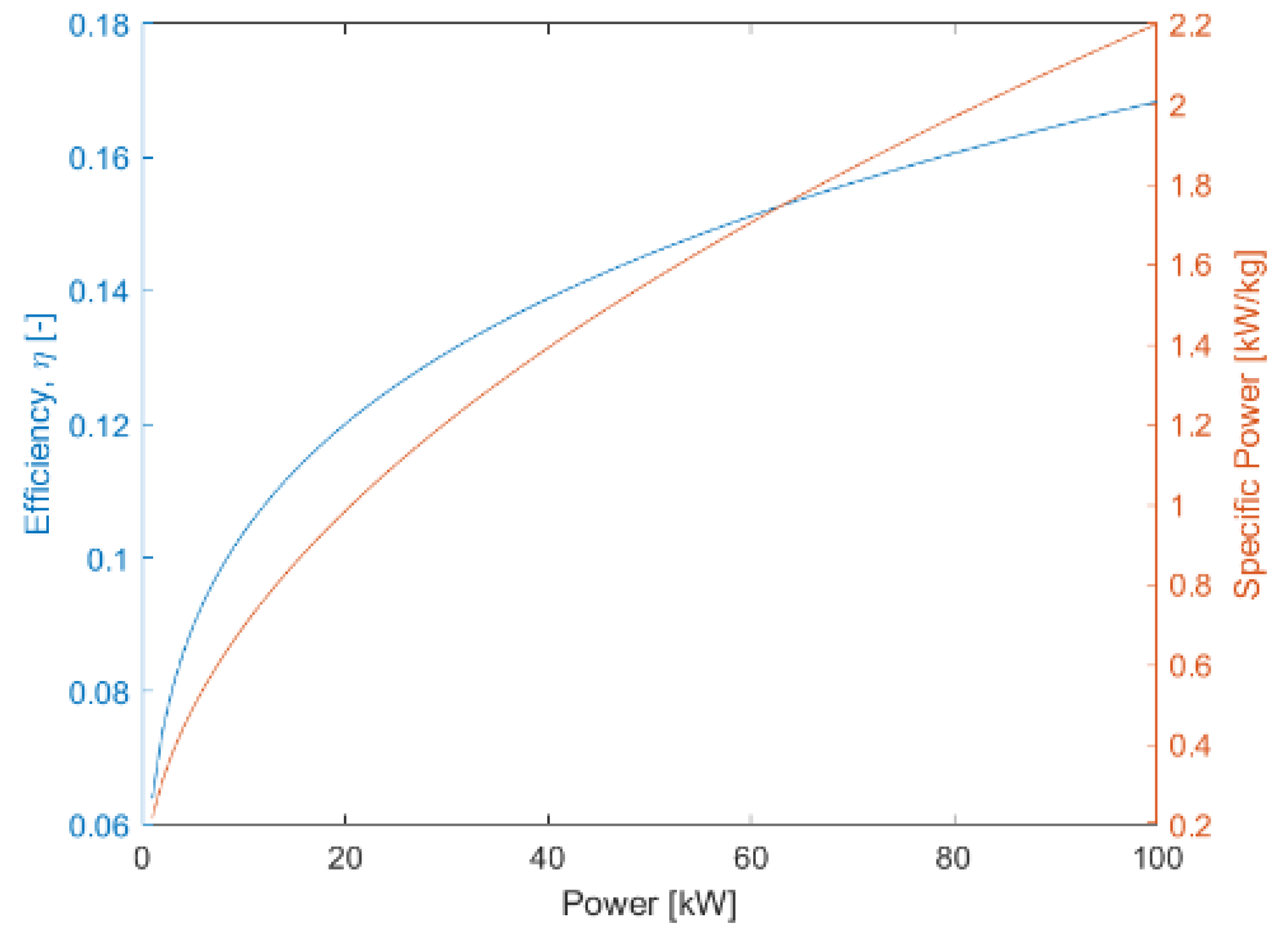
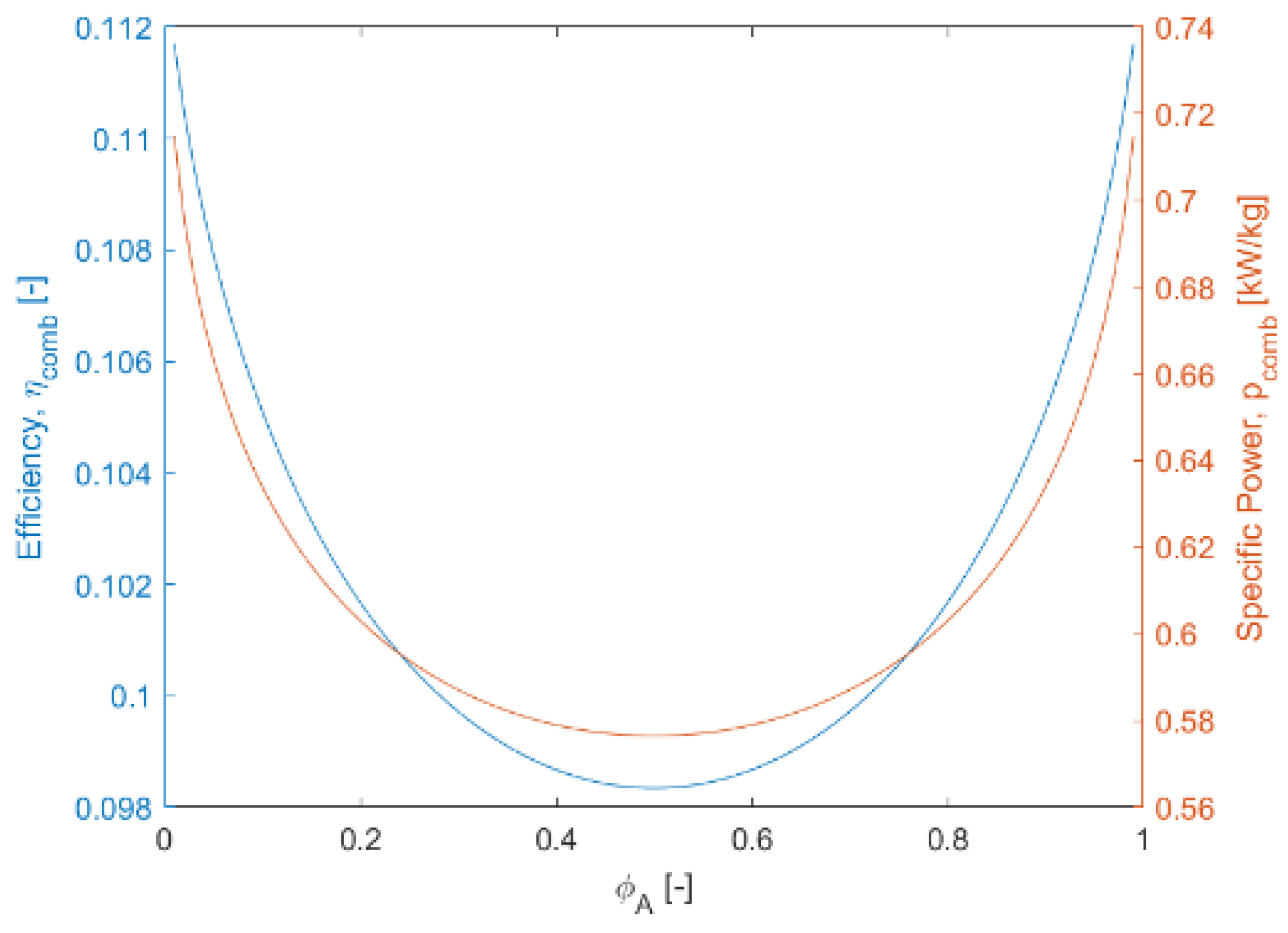
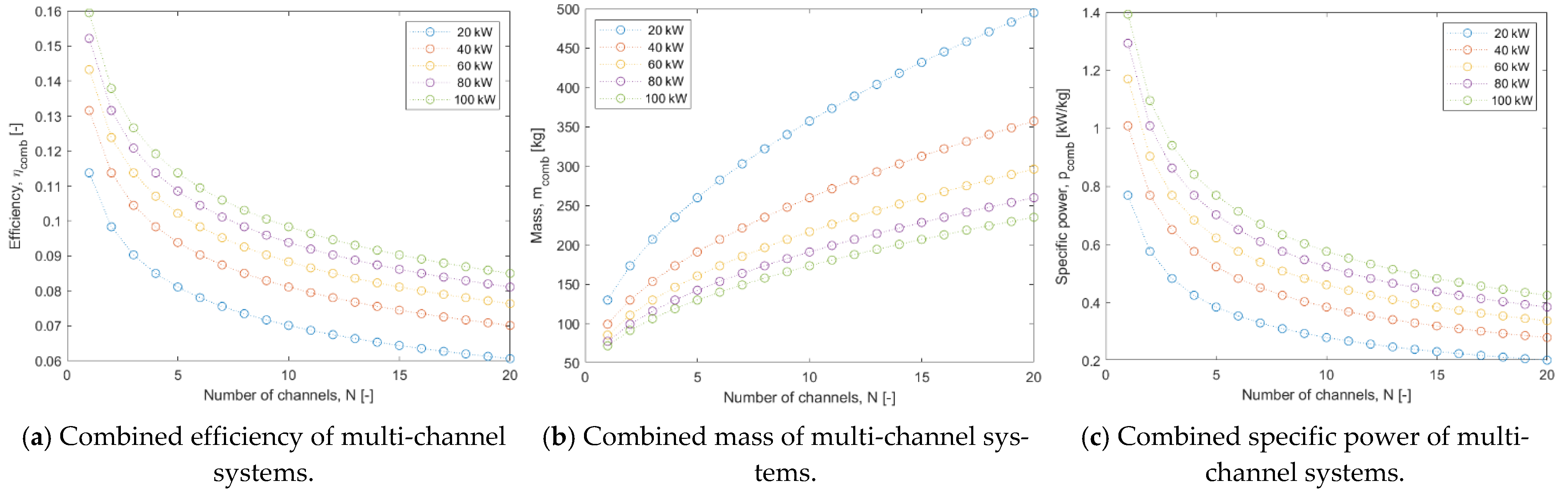
2.3. Assumption of Constant Efficiency and Specific Power
3. Sizing Procedure
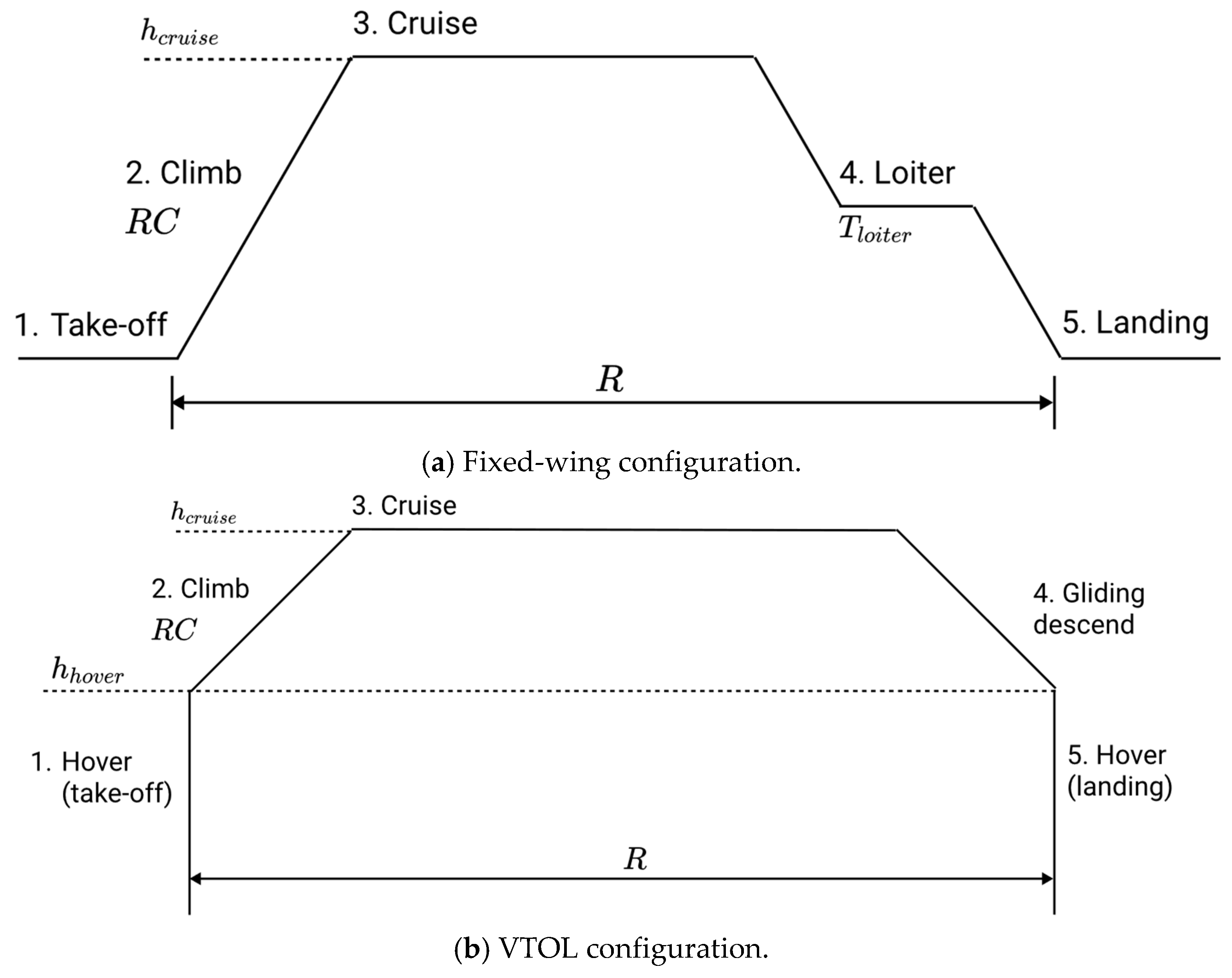
3.1. Energy Modelling by Mission Analysis
3.2. Aerodynamic Modelling
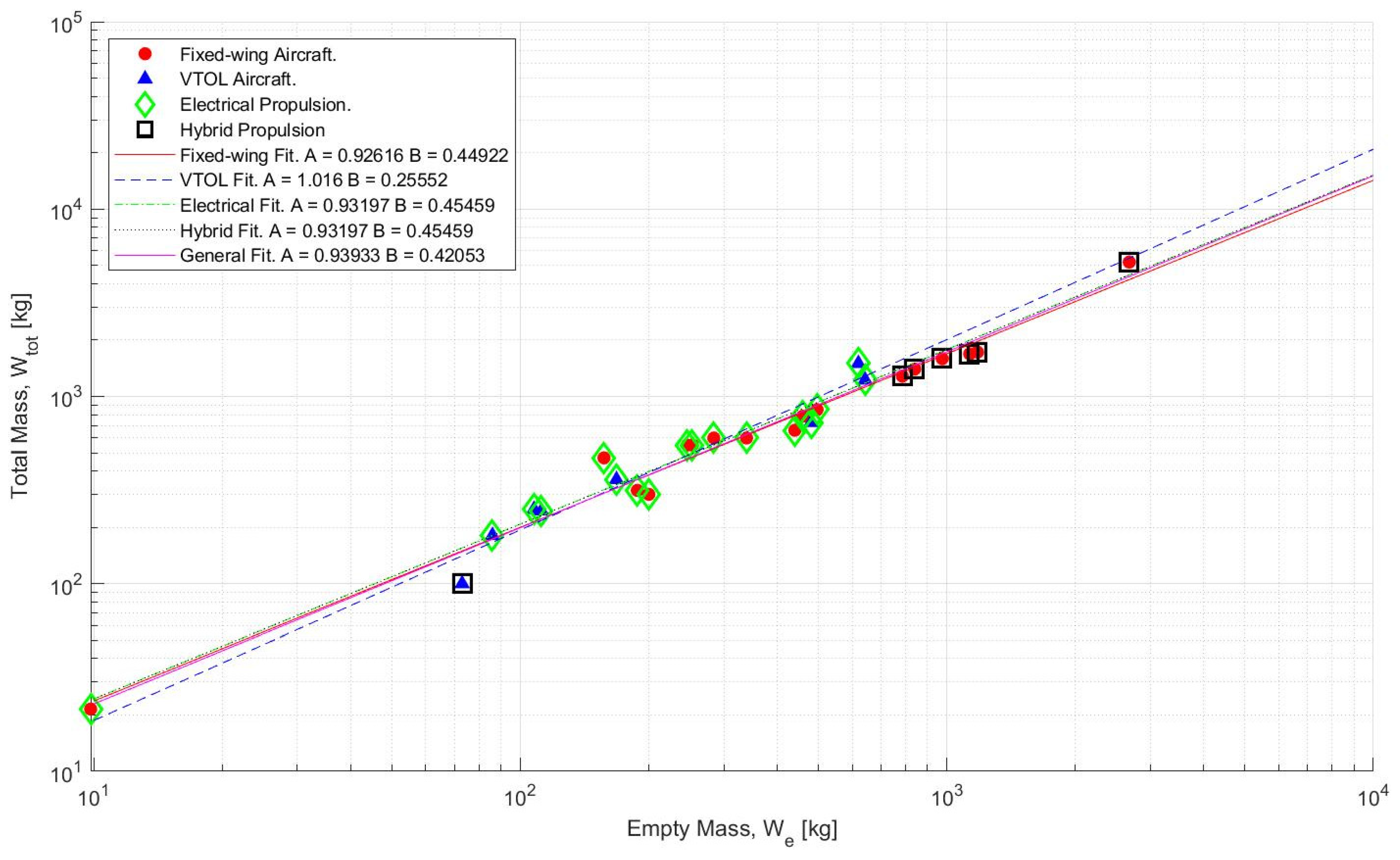
3.3. Mass Regression Relationship
4. Model Validation
4.1. Case Studies
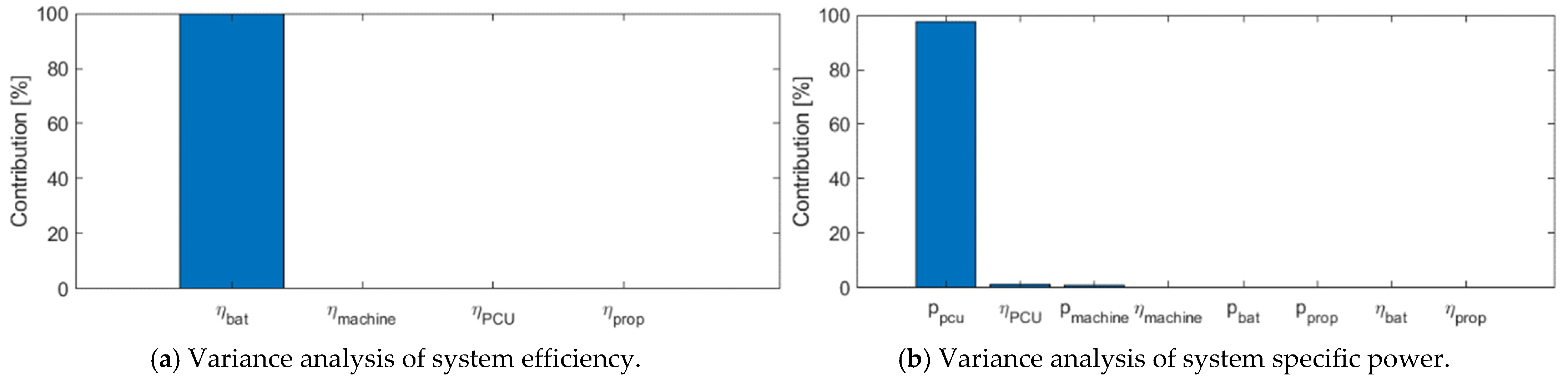
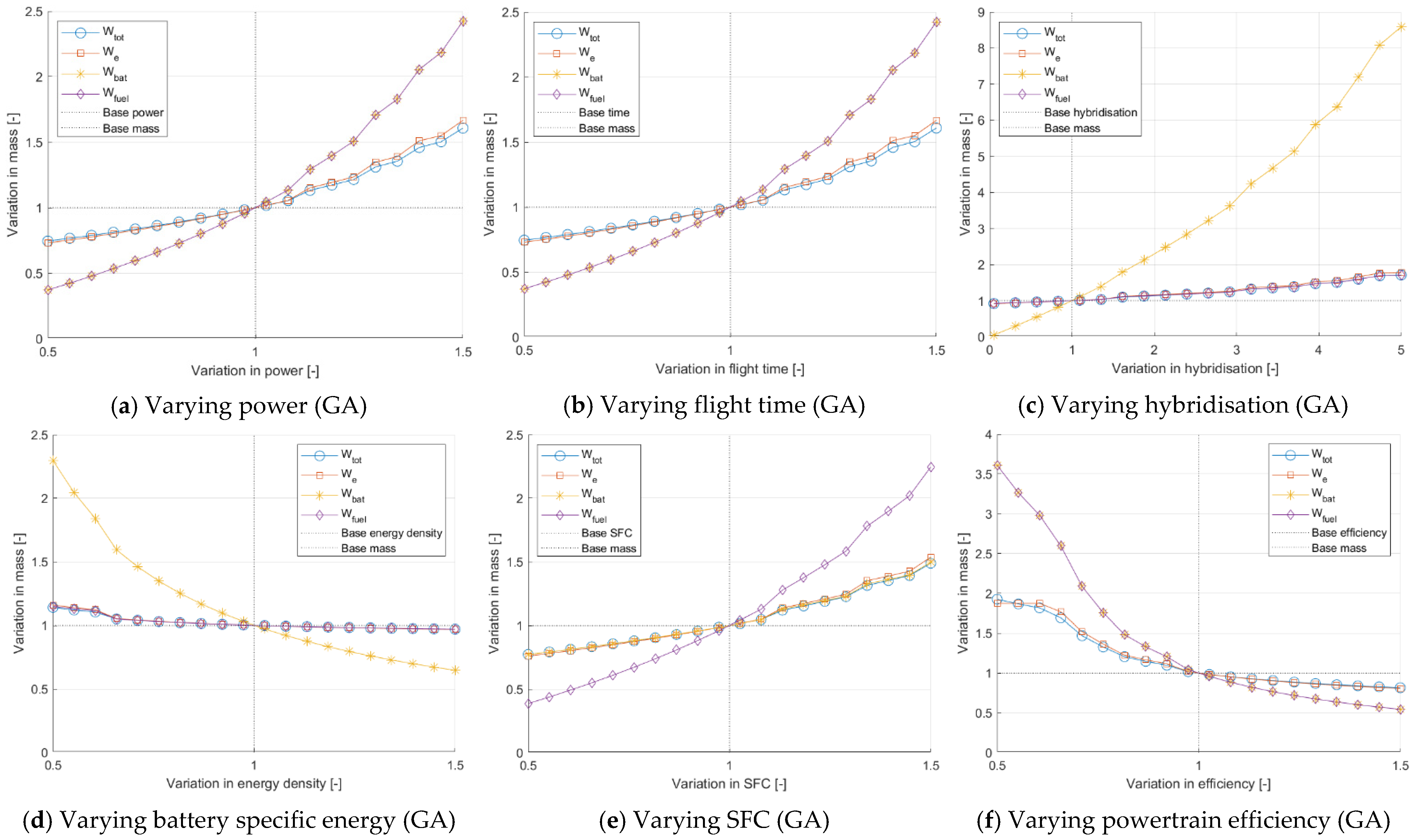
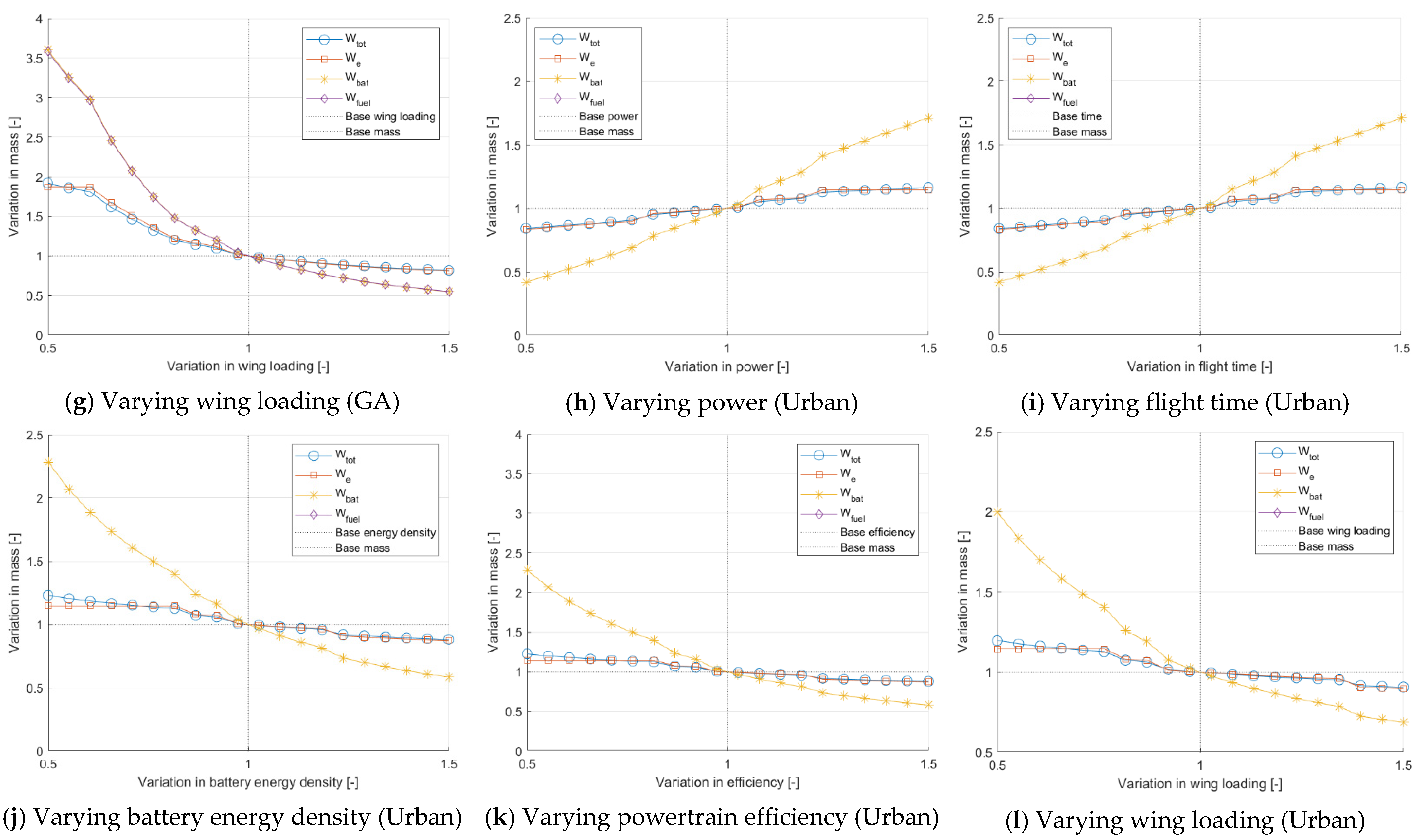
4.2. Sensitivity Analysis
5. Conclusions and Further Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Component element input power, series system input power. | |
| Component element output power, system output power | |
| ηk | Component element efficiency |
| pk | Component element specific power |
| m_k | Component element mass |
| System efficiency | |
| psys | System specific power |
| msys | System mass |
| Input parameter, ratio of component input power to total system input power | |
| Output parameter, ratio of component output power to total system output power. | |
| Parallel system input power. | |
| Aircraft total mass | |
| Aircraft empty mass | |
| Aircraft payload mass | |
| Aircraft battery mass | |
| Aircraft fuel mass | |
| Aircraft motor mass | |
| Aircraft powertrain mass | |
| Specific fuel consumption | |
| Battery specific energy | |
| Energy supplied from fuel during the entire mission. | |
| Energy supplied by the battery during the entire mission | |
| Combustion engine efficiency | |
| Energy supplied by the battery during a given phase | |
| Energy supplied from fuel during a given phase | |
| Hybridisation of energy, ratio of energy supplied by the battery to the total energy required during a given phase | |
| Power requirement for a given phase | |
| Duration of a given phase | |
| Cruising altitude | |
| Cruising speed | |
| Hover altitude | |
| Hover speed | |
| Range of aircraft | |
| Rate of climb | |
| Coefficient of lift | |
| Air density | |
| Wing loading | |
| Drag coefficient | |
| Zero-lift drag coefficient | |
| Power loading | |
| Gravitational constant | |
| Disk area | |
| Hybridisation of power, ratio of power supplied by battery to total power supplied. | |
| Gross power required by system | |
| Induced drag factor | |
| Interference factor | |
| System variance | |
| Component variance |
References
- ATI. INSIGHT 07 Electrical Power Systems. 2018. Available online: https://www.ati.org.uk/wp-content/uploads/2021/09/insight_07-electrical-power-systems.pdf (accessed on 4 April 2022).
- Roland Berger. Aircraft Electrical Propulsion—The Next Chapter of Aviation? October 2017. Available online: https://www.rolandberger.com/en/Media/Aircraft-Electrical-Propulsion-Start-Ups-Drive-Innovation.html (accessed on 21 August 2021).
- Roland Berger. Aircraft Electrical Propulsion—Onwards and Upwards. July 2018. Available online: https://www.rolandberger.com/en/Media/Pace-of-progress-quickens-for-electrical-propulsion-in-aircraft.html (accessed on 21 August 2021).
- Sahoo, S.; Zhao, X.; Kyprianidis, K. A Review of Concepts, Benefits, and Challenges for Future Electrical Propulsion-Based Aircraft. Aerospace 2020, 7, 44. [Google Scholar] [CrossRef]
- EHang. EHang AAV: The Era of Urban Air Mobility is Coming. Available online: https://www.ehang.com/ehangaav (accessed on 23 February 2022).
- Bacchini, A.; Cestino, E. Electric VTOL Configurations Comparison. Aerospace 2019, 6, 26. [Google Scholar] [CrossRef]
- Bartini. The Future of Air Travel. Available online: https://bartini.aero/ (accessed on 23 February 2022).
- AIRBUS. Vahana: Our Single-Seat eVTOL Demonstrator. Available online: https://www.airbus.com/en/urbanairmobility/vahana (accessed on 23 February 2022).
- Mercier, C.; Gazzino, M.; Mugnier, M. State of the Art of Helicopter Hybrid Propulsion. In Proceedings of the 72nd AHS International’s Annual Forum & Technology Display (AHS Forum 72), West Palm Beach, FL, USA, 16–19 May 2016; Available online: https://vtol.org/store/product/state-of-the-art-of-helicopter-hybrid-propulsion-11519.cfm (accessed on 21 August 2022).
- Finger, D.; Braun, C.; Bil, C. Case Studies in Initial Sizing for Hybrid-Electric General Aviation Aircraft. In Proceedings of the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar]
- Raymer, D. Aircraft Design: A Conceptual Approach, 6th ed.; AIAA: Reston, VA, USA, 2018; ISBN 978-1-62410-490-9. [Google Scholar]
- Roskam, J. Airplane Design Part I: Preliminary Sizing of Airplanes; DARcorporation: Lawrence, KS, USA, 1997; ISBN 978-1884885426. [Google Scholar]
- Pornet, C. Conceptual Design Methods for Sizing and Performance of Hybrid-Electric Transport Aircraft. Ph.D. Thesis, Technische Universität München, München, Germany, 2017. [Google Scholar]
- Riboldi, C.E.D.; Gualdoni, F. An integrated approach to the preliminary weight sizing of small electric aircraft. Aerosp. Sci. Technol. 2016, 58, 134–149. [Google Scholar] [CrossRef]
- Riboldi, C.E.D. An optimal approach to the preliminary design of small hybrid-electric aircraft. Aerosp. Sci. Technol. 2018, 81, 14–31. [Google Scholar] [CrossRef]
- De Vries, R.; Hoogreef, M.; Vos, R. Aero-Propulsive Efficiency Requirements for Turboelectric Transport Aircraft. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 5–10 January 2020. [Google Scholar]
- Finger, D.F.; Bil, C.; Braun, C. Initial Sizing Methodology for Hybrid-Electric General Aviation Aircraft. J. Aircr. 2019, 57, 245–255. [Google Scholar] [CrossRef]
- Geiß, I.; Voit-Nitschmann, R. Sizing of the energy storage system of hybrid-electric aircraft in general aviation. CEAS Aeronaut. J. 2017, 8, 53–65. [Google Scholar] [CrossRef]
- Jansen, R.; Brown, G.V.; Felder, J.L. Turboelectric Aircraft Drive Key Performance Parameters and Functional Requirements. In Proceedings of the 51st AIAA/SAE/ASEE Joint Propulsion Conference, Orlando, FL, USA, 27–29 July 2015. [Google Scholar]
- Booker, J.D.; Patel, C.; Mellor, P. Modelling Green VTOL Concept Designs for Reliability and Efficiency. Designs 2021, 5, 68. [Google Scholar] [CrossRef]
- AIAA. Guidelines for Analysis of Hybrid Electric Aircraft System Studies. Available online: https://www.aiaa.org/docs/defaultsource/uploadedfiles/publications/standards/hybrid-electric_properties_attributes.pdf (accessed on 27 April 2022).
- Stückl, S.; van Toor, J.; Lobentanzer, H. Voltair-the all-electric propulsion concept platform-a vision for atmospheric friendly flight. In Proceedings of the 28th International Congress of the Aeronautical Sciences (ICAS 2012), Brisbane, QLD, Australia, 23–28 September 2012. [Google Scholar]
- Finger, D.; de Vries, R.; Roelof, V.; Braun, C.; Bil, C. A Comparison of Hybrid-Electric Aircraft Sizing Methods. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 5–10 January 2020. [Google Scholar]
- MEADinfo. Comparison of Gear Efficiencies. Available online: https://www.meadinfo.org/2008/11/gear-efficiency-spurhelical-bevel-worm.html (accessed on 4 April 2022).
- Vankan, W.; Lammen, W. Parallel hybrid electric propulsion architecture for single aisle aircraft-powertrain investigation. MATEC Web Conf. 2019, 304, 03008. [Google Scholar] [CrossRef]
- Isikveren, A.; Seitz, A.; Vratny, P.C.; Pornet, C. Conceptual Studies of Universally-Electric Systems Architectures Suitable for Transport Aircraft. In Proceedings of the 61. Deutscher Luft- und Raumfahrtkongress 2012, Berlin, Germany, 10–11 September 2012. [Google Scholar]
- Cano, T.; Castro, I.; Rodríguez, A.; Lamar, D.G.; Khalil, Y.F.; Albiol-Tendillo, L.; Kshirsagar, P. Future of Electrical Aircraft Energy Power Systems: An Architecture Review. IEEE Trans. Transp. Electrif. 2021, 7, 1915–1929. [Google Scholar] [CrossRef]
- Brown, G.V. Weights and Efficiencies of Electric Components of a Turboelectric Aircraft Propulsion System. In Proceedings of the 49th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011. [Google Scholar]
- Jansen, R.H.; Bowman, C.; Jankovsky, A.; Dyson, R.; Felder, J.L. Overview of NASA Electrified Aircraft Propulsion Research for Large Subsonic Transports; Technical Report 20170012222; NASA Glenn Research Center: Cleveland, OH, USA, November 2017. Available online: https://ntrs.nasa.gov/citations/20170012222 (accessed on 21 August 2022).
- Stagliano, F.; Hornung, M. Impact of Novel Propulsion System Architectures Incorporating Diesel Engines on Mission Fuel Burn for a Tilt-Wing Transport Aircraft. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Indianapolis, IN, USA, 17–19 September 2012. [Google Scholar]
- Johnson, W.; Silva, C.; Solis, E. Concept Vehicles for VTOL Air Taxi Operations. In Proceedings of the AHS Specialists Conference on Aeromechanics Design for Transformative Vertical Flight, San Francisco, CA, USA, 16–19 January 2018. [Google Scholar]
- Sabihuddin, S.; Kiprakis, A.E.; Mueller, M. A Numerical and Graphical Review of Energy Storage Technologies. Energies 2015, 8, 172–216. [Google Scholar] [CrossRef]
- Damiano, A.; Porru, M.; Salimbeni, A.; Serpi, A.; Castiglia, V.; Di Tommaso, A.O.; Miceli, R.; Schettino, G. Batteries for Aerospace: A Brief Review. In Proceedings of the 2018 AEIT International Annual Conference, Bari, Italy, 3–5 October 2018; pp. 1915–1929. [Google Scholar]
- Vratny, P.; Gologan, C.; Pornet, C.; Isikveren, A.T.; Hornung, M. Battery Pack Modeling Methods for Universally-Electric Aircraft. In Proceedings of the 4th CEAS Air & Space Conference, Linköping, Sweden, 16–19 September 2013. [Google Scholar]
- Bradyley, M.K.; Droney, C.K. Subsonic Ultra Green Aircraft Research: Phase II; Technical Report 20150017039; NASA Langley Research Center: Hampton, VA, USA, 1 April 2015. Available online: https://ntrs.nasa.gov/citations/20150017039 (accessed on 21 August 2021).
- Isikveren, A.T.; Pornet, C.; Vratny, P.C.; Schmidt, M. Conceptual Studies of Future Hybrid-Electric Regional Aircraft. In Proceedings of the ISABE 2015, Phoenix, AZ, USA, 25–30 October 2015. [Google Scholar]
- Nathen, P.; Bardenhagen, A.; Strohmayer, A.; Miller, R.; Grimshaw, S.; Taylor, J. Architectural Performance Assessment of an Electric Vertical Take-off and Landing (e-VTOL) Aircraft Based on a Ducted Vectored Thrust Concept. 7 April 2021. Available online: https://lilium.com/files/redaktion/refresh_feb2021/investors/Lilium_7-Seater_Paper.pdf (accessed on 21 August 2021).
- De Vries, R.; Brown, M.; Vos, R. Preliminary Sizing Method for Hybrid-Electric Distributed-Propulsion Aircraft. J. Aircr. 2019, 56, 2172–2188. [Google Scholar] [CrossRef]
- Melo, S.; Cerdas, F.; Barke, A.; Thies, C.; Spengler, T.S.; Herrman, C. Life Cycle Engineering of future aircraft systems: The case of eVTOL vehicles. Procedia CIRP 2020, 90, 297–302. [Google Scholar] [CrossRef]
- Pipistrel. VELIS Electro. Available online: https://www.pipistrel-aircraft.com/aircraft/electric-flight/velis-electro-easa-tc/ (accessed on 22 February 2022).
- Pipistrel. Nuuva V300. Available online: https://www.pipistrel-aircraft.com/aircraft/nuuva-v300/ (accessed on 22 February 2022).
- ZUNUM Aero. Aircraft. Available online: https://zunum.aero/aircraft/ (accessed on 22 February 2022).
- Opener. Blackfly. Available online: https://opener.aero (accessed on 25 February 2022).
- Smartflyer. Specifications. Available online: https://www.smartflyer.ch/ (accessed on 25 February 2022).
- Volta Volaré. Specifications. Available online: http://www.voltavolare.com/performance/ (accessed on 25 February 2022).
- Chretien, P. Paving the Way to Hybrid Helicopters. 2019. Available online: https://www.solutionf.com/pdf/Hybrid-helicopter-Rev-6A.pdf (accessed on 25 February 2022).
- AIRBUS Group Corporate Technical Office. E-Fan: The New Way to Fly. Munich, Germany/Suresnes, France. 2015. Available online: https://web.archive.org/web/20170418132656/http://www.airbusgroup.com/service/mediacenter/download/?uuid=48b1bd2c-a428-4c65-82e5-ed3e923bd142 (accessed on 21 August 2022).
- Jetson. Detailed Specifications. Available online: https://www.horizonaircraft.com/x5-aircraft/ (accessed on 25 February 2022).
- Xiao, J.; Salk, N.; Haran, K. Conceptual Design of an eVTOL Air Shuttle for Rapid Intercity Transport. In Proceedings of the 2020 IEEE Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 27–28 February 2020; pp. 1–8. [Google Scholar]
- Booker, J.D.; Raines, M.; Swift, K.G. Designing Capable and Reliable Products; Butterworth-Heinemann: Oxford, UK, 2001. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Efficiency Values | Specific Power Values | ||||||
|---|---|---|---|---|---|---|---|---|
| Main Rotor Gearbox | 0.96 [23] | 0.94 [20] | ||||||
| Bevel Gearbox | 0.96 [23] | 0.93 [24] | 0.99 [24] | 0.97 [20] | ||||
| Multiplier/Reducer Gearbox | 0.96 [23] | 0.94 [24] | 0.98 [24] | 0.94 [20] | ||||
| Shafting | 0.99 [20] | |||||||
| Power Cables | 0.99 [25] | 0.99 [20] | ||||||
| Mid-term | 0.99 [13] | 1.00 [26] | 1.00 [25] | 1.00 [27] | ||||
| Power Control Unit (PCU) | 0.95 [28] | 0.97 [13] | 0.95 [25] | 0.95 [1] | 8.2 [28] | 16.4 [28] | 11.0 [13] | 11.0 [22] |
| 0.97 [20] | 2.0 [1] | 4.0 [1] | ||||||
| Near-term | 0.97 [16] | 0.97 [1] | 0.98 [20] | 13.0 [16] | 7.5 [25] | 10.0 [1] | ||
| Mid-term | 0.99 [16] | 0.99 [29] | 0.993 [29] | 1.00 [13] | 19.0 [16] | 19.0 [29] | 26.0 [29] | 24.7 [28] |
| 1.00 [26] | 0.98 [1] | 0.99 [27] | 1.00 [27] | 18.0 [13] | 25.0 [13] | 20.0 [22] | 20.0 [26] | |
| 0.99 [23] | 17.0 [1] | 31.0 [27] | 49.0 [27] | |||||
| Long-term | 1.00 [16] | 0.99 [28] | 1.00 [28] | 0.98 [25] | 32.0 [16] | 16.4 [28] | 32.8 [28] | 15.0 [25] |
| 0.98 [1] | 0.99 [27] | 25.0 [1] | 25.0 [27] | |||||
| Turboshaft (200 kW) | 0.30 [23] | 0.20 [20] | 0.30 [20] | 3.1 [30] | 1.2 [10] | |||
| Fuel Cell | 0.65 [20] | 0.7 [13] | ||||||
| Mid-term | 0.55 [13] | 0.60 [27] | 0.83 [20] | |||||
| Long-term | 1.0 [13] | 5.0 [27] | ||||||
| Motor/Generator | 0.95 [31] | 0.95 [13] | 0.95 [25] | 0.90 [1] | 5.0 [13] | 3.0 [1] | 5.0 [10] | |
| 0.92 [20] | ||||||||
| Near-term | 0.92 [16] | 0.93 [1] | 9.0 [16] | 7.5 [25] | 7.5 [1] | |||
| Mid-term | 0.96 [16] | 0.96 [29] | 0.98 [29] | 0.96 [1] | 13.0 [16] | 13.0 [29] | 16.0 [29] | 15.0 [13] |
| 0.96 [27] | 0.96 [23] | 0.99 [20] | 20.0 [13] | 8.0 [22] | 25.0 [22] | 20.0 [26] | ||
| 12.0 [1] | 21.0 [27] | 7.7 [23] | ||||||
| Long-term | 0.99 [16] | 0.99 [28] | 1.00 [28] | 0.99 [13] | 22.0 [16] | 15.0 [25] | 20.0 [1] | 19.0 [27] |
| 1.00 [26] | 0.98 [25] | 0.96 [1] | 0.98 [27] | 25.0 [27] | ||||
| 0.99 [27] | ||||||||
| Diesel Engines | 0.40 [30] | 0.40 [20] | 0.8 [30] | 4.2 [30] | ||||
| Battery | 0.93 [25] | 0.90 [20] | 0.70 [32] | 1.00 [32] | 0.7 [6] | 1.3 [6] | 2.0 [13] | 2.0 [33] |
| 3.0 [1] | 0.01 [32] | 2.0 [32] | ||||||
| Near-term | 3.0 [25] | 5.0 [1] | 7.5 [1] | |||||
| Mid-term | 0.99 [34] | 0.90 [26] | 0.95 [25] | 0.60 [27] | ||||
| 0.99 [20] | ||||||||
| Long-term | 0.3 [35] | 0.4 [22] | 0.6 [22] | 6.0 [25] | ||||
| 7.5 [1] | 10.0 [1] | 1.0 [23] | ||||||
| Component | Minimum | Maximum | Sample Mean | Sample Median | Sample Variance (×10−3) |
|---|---|---|---|---|---|
| Main Rotor Gearbox | 0.940 | 0.960 | 0.950 | 0.950 | 0.200 |
| Bevel Gearbox | 0.930 | 0.990 | 0.963 | 0.965 | 0.625 |
| Multiplier/Reducer Gearbox | 0.940 | 0.980 | 0.955 | 0.950 | 0.367 |
| Shafting | 0.990 | 0.990 | 0.990 | 0.990 | - |
| Power Cables | 0.990 | 0.990 | 0.990 | 0.990 | 0.000 |
| Mid-term | 0.990 | 1.000 | 0.996 | 0.996 | 0.170 |
| Propeller | 0.870 | 0.870 | 0.870 | 0.870 | - |
| Power Control Unit (PCU) | 0.950 | 0.970 | 0.958 | 0.950 | 0.120 |
| Near-term | 0.970 | 0.980 | 0.973 | 0.970 | 0.033 |
| Mid-term | 0.980 | 0.995 | 0.991 | 0.990 | 0.022 |
| Long-term | 0.980 | 1.000 | 0.989 | 0.989 | 0.064 |
| Turboshaft (200 kW) | 0.195 | 0.300 | 0.265 | 0.300 | 3.675 |
| Fuel Cell | 0.650 | 0.650 | 0.650 | 0.650 | |
| Mid-term | 0.550 | 0.830 | 0.660 | 0.600 | 22.30 |
| Motor/Generator | 0.900 | 0.950 | 0.934 | 0.950 | 0.530 |
| Near-term | 0.920 | 0.930 | 0.925 | 0.925 | 0.050 |
| Mid-term | 0.960 | 0.990 | 0.967 | 0.960 | 0.157 |
| Long-term | 0.960 | 0.997 | 0.986 | 0.990 | 0.129 |
| Diesel Engines | 0.395 | 0.400 | 0.398 | 0.398 | 0.013 |
| Battery | 0.700 | 1.000 | 0.880 | 0.910 | 16.41 |
| Mid-term | 0.600 | 0.990 | 0.890 | 0.950 | 26.93 |
| Component | Minimum | Maximum | Sample Mean | Sample Median | Sample Variance |
|---|---|---|---|---|---|
| Power Control Unit (PCU) | 2.00 | 16.40 | 8.77 | 9.60 | 27.41 |
| Near-term | 7.50 | 13.00 | 10.17 | 10.00 | 7.58 |
| Mid-term | 17.00 | 49.00 | 24.43 | 20.00 | 84.45 |
| Long-term | 15.00 | 32.80 | 24.37 | 25.00 | 56.28 |
| Turboshaft | 1.18 | 3.12 | 2.15 | 2.15 | 1.88 |
| Fuel Cell | 0.71 | 0.71 | 0.71 | 0.71 | 0.00 |
| Long-term | 1.00 | 5.00 | 3.00 | 3.00 | 8.00 |
| Motor/Generator | 3.00 | 5.00 | 4.33 | 5.00 | 1.33 |
| Near-term | 7.50 | 9.00 | 8.00 | 7.50 | 0.75 |
| Mid-term | 7.70 | 25.00 | 15.52 | 15.00 | 30.33 |
| Long-term | 15.00 | 25.00 | 20.20 | 20.00 | 13.70 |
| Diesel Engines | 0.8. | 4.15 | 2.49 | 2.49 | 5.51 |
| Battery | 0.01 | 3.00 | 1.57 | 2.00 | 0.98 |
| Near-term | 3.00 | 7.50 | 5.17 | 5.00 | 5.08 |
| Long-term | 0.30 | 10.00 | 3.69 | 1.00 | 16.42 |
| Component | Values | |||||||
|---|---|---|---|---|---|---|---|---|
| Turboshaft SFC | 0.42 [30] | 0.31 [10] | ||||||
| Diesel SFC | 0.21 [30] | |||||||
| Battery specific energy | 0.10 [31] | 0.15 [31] | 0.10 [6] | 0.25 [6] | 0.20 [13] | 0.14 [33] | 0.10 [22] | 0.20 [22] |
| 0.14 [1] | 0.25 [10] | 0.03 [32] | 0.30 [32] | |||||
| Near-term | 0.40 [31] | 0.40 [13] | 0.50 [25] | 0.20 [1] | 0.30 [1] | 0.50 [22] | ||
| Long-term | 0.90 [36] | 1.30 [36] | 0.75 [13] | 1.50 [13] | 0.75 [35] | 0.75 [22] | 2.00 [22] | 1.87 [26] |
| 1.00 [25] | 0.30 [1] | 0.50 [1] | 0.70 [27] | |||||
| Component | Minimum | Maximum | Sample Mean | Sample Median | Sample Variance (×10−3) |
|---|---|---|---|---|---|
| Turboshaft SFC (200 kW) | 0.31 | 0.42 | 0.37 | 0.37 | 5.62 |
| Diesel SFC | 0.21 | 0.21 | 0.21 | 0.21 | - |
| 0.03 | 0.30 | 0.16 | 0.15 | 6.16 | |
| Near-term | 0.20 | 0.50 | 0.38 | 0.40 | 13.67 |
| Long-term | 0.30 | 2.00 | 1.03 | 0.83 | 283.3 |
| General Aviation | Glider | Logistics | Urban (5 PAX) | Urban (10 PAX) | |
|---|---|---|---|---|---|
| Zero- | 0.0254 [10] | 0.011 [14] | 0.015 | 0.0163 [6] | 0.015 |
| 0.0402 [10] | 0.0128 [14] | 0.0265 | 0.0580 [6] | 0.029 | |
| . [kg/m2] | 0.909 | 1.169 | 1.168 | 1.168 | |
| Climb | 1.167 | ||||
| Cruise | 1.112 | ||||
| Loiter | 1.167 | ||||
| Climb | 40 | 24.7 [14] | 40 | 50 | 50 [49] |
| Cruise | 90 [10] | 46.3 [14] | 45.8 [41] | 80.6 | 67 [49] |
| Loiter | 45 | ||||
| Hover (take-off) | 3 | 5 | 5 [49] | ||
| Hover (landing) | 3 | 5 | 1.5 [49] | ||
| Climb | 0% | 100% | 0% | 100% | 100% |
| Cruise | 0.25% | 100% | 0% | 100% | 100% |
| Loiter | 0% | 100% | |||
| Hover (take-off) | 100% | 100% | 100% | ||
| Hover (landing) | 100% | 100% | 100% | ||
| 0.25 [10] | 0.15 | 0.15 | 0.15 | 0.15 | |
| 2000 | 75 | 150 [49] | |||
| [12] | [6] | [49] | |||
| 1.0 | 3.0 [14] | 5.0 | 0.5 | 0.5 [49] | |
| Rate of climb, RC [m/s] | 5 [10] | 2.02 [14] | 3 | 8 | 8 [49] |
| Range, R [km] | 1150 [10] | 300 [14] | 300 | 245 | 200 [49] |
| 45 [10] | 15 [14] |
| Case Study | General Aviation [10] | Glider [14] | Logistics [41] | Urban (5 PAX) [6] | Urban (10 PAX [40]) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Specified parameters | ||||||||||
| Given power loading | 6.1 kg/kW | 20.5 kg/kW | 4.32 kg/kW | 9.1 kg/kW | 3.8 kg/kW | |||||
| Given wing loading | 135 kg/m2 | 61 kg/m2 | 73.9 kg/m2 | 472 kg/m2 | 137 kg/m2 | |||||
| Payload mass | 380 kg | 150 kg | 300 kg | 564 kg | 1000 kg | |||||
| Sizing procedure results | ||||||||||
| Model | Actual | Model | Actual | Model | Actual | Model | Actual | Model | Actual | |
| Battery mass [kg] | 32.5 | 33.3 | 171 | 241 | 136 | 576 | 198 | 900 | 661 | 1218 |
| Fuel mass [kg] | 198.3 | 385.9 | 9.16 | 65 | ||||||
| Empty mass [kg] | 722 | 1556 | 352 | 402 | 503 | 759 | 931 | 236 | 1935 | 1357 |
| Total mass [kg] | 1333 | 2355 | 672 | 793 | 948 | 1700 | 1682 | 1700 | 3595 | 3575 |
| Accuracy of prediction. | 56.6% | 84.7% | 55.8% | 99.5% | 101% | |||||
| Powertrain modelling results | ||||||||||
| Powertrain | Series-hybrid | All-electric | Parallel hybrid | All-electric | All-electric | |||||
| Deliverable power | 218.5 kW | 32.8 kW | 219.5 kW | 86 kW | 946.2 kW | |||||
| Modelled active mass | 302.3 kg | 14.1 kg | 109 kg | 80.1 kg | 408 kg | |||||
| Modelled system efficiency | 19.3% | 68.6% | 33.2% | 68.6% | 68.6% | |||||
| Model | Actual | Model | Actual | Model | Actual | Model | Actual | Model | Actual | |
| Modelled active mass to total mass | 22.7% | 12.8% | 2.1% | 1.8% | 11.5% | 6.4% | 4.7% | 4.7% | 11.3% | 11.4% |
| Modelled active mass to empty mass | 41.9% | 19.4% | 4.0% | 3.5% | 21.7% | 14.4% | 8.6% | 33.9% | 21.1% | 30.0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; Booker, J. Preliminary Sizing of Electric-Propulsion Powertrains for Concept Aircraft Designs. Designs 2022, 6, 94. https://doi.org/10.3390/designs6050094
Hu J, Booker J. Preliminary Sizing of Electric-Propulsion Powertrains for Concept Aircraft Designs. Designs. 2022; 6(5):94. https://doi.org/10.3390/designs6050094
Chicago/Turabian StyleHu, Josin, and Julian Booker. 2022. "Preliminary Sizing of Electric-Propulsion Powertrains for Concept Aircraft Designs" Designs 6, no. 5: 94. https://doi.org/10.3390/designs6050094
APA StyleHu, J., & Booker, J. (2022). Preliminary Sizing of Electric-Propulsion Powertrains for Concept Aircraft Designs. Designs, 6(5), 94. https://doi.org/10.3390/designs6050094