The design procedure described in the following section aims to select the best power-split transmission to fulfill some operative and constructive requirements, which are related to the operations of the system to hybridize and the availability of thermal and electric actuators. Nevertheless, these requirements can usually be identified before the transmission design process. Thus, this section begins with a description of the existing drilling rig to hybridize and its operations. Then, the hierarchical and modular procedure for designing the power-split transmission and the parametric model on which it is based are outlined.
2.1. Oil Drilling Rig under Study: Description and Operations
The oil drilling rig taken as a case study in this paper is the Drillmec MR-8000 [
39]: a mobile self-propelled rig with a maximum static hook load of 200 tons and a maximum drilling depth of 3000 m. Since this paper aims to hybridize the drilling rig to recover braking energy, only the hoisting system is here described in more detail. However, it should be noted that other separately fed subsystems exist in the plant, such as the mud pumping system; the hydraulic top-drive providing the rotative drilling torque; and auxiliary equipment for lubrication, drill pipe handling, and casing pipe cementation.
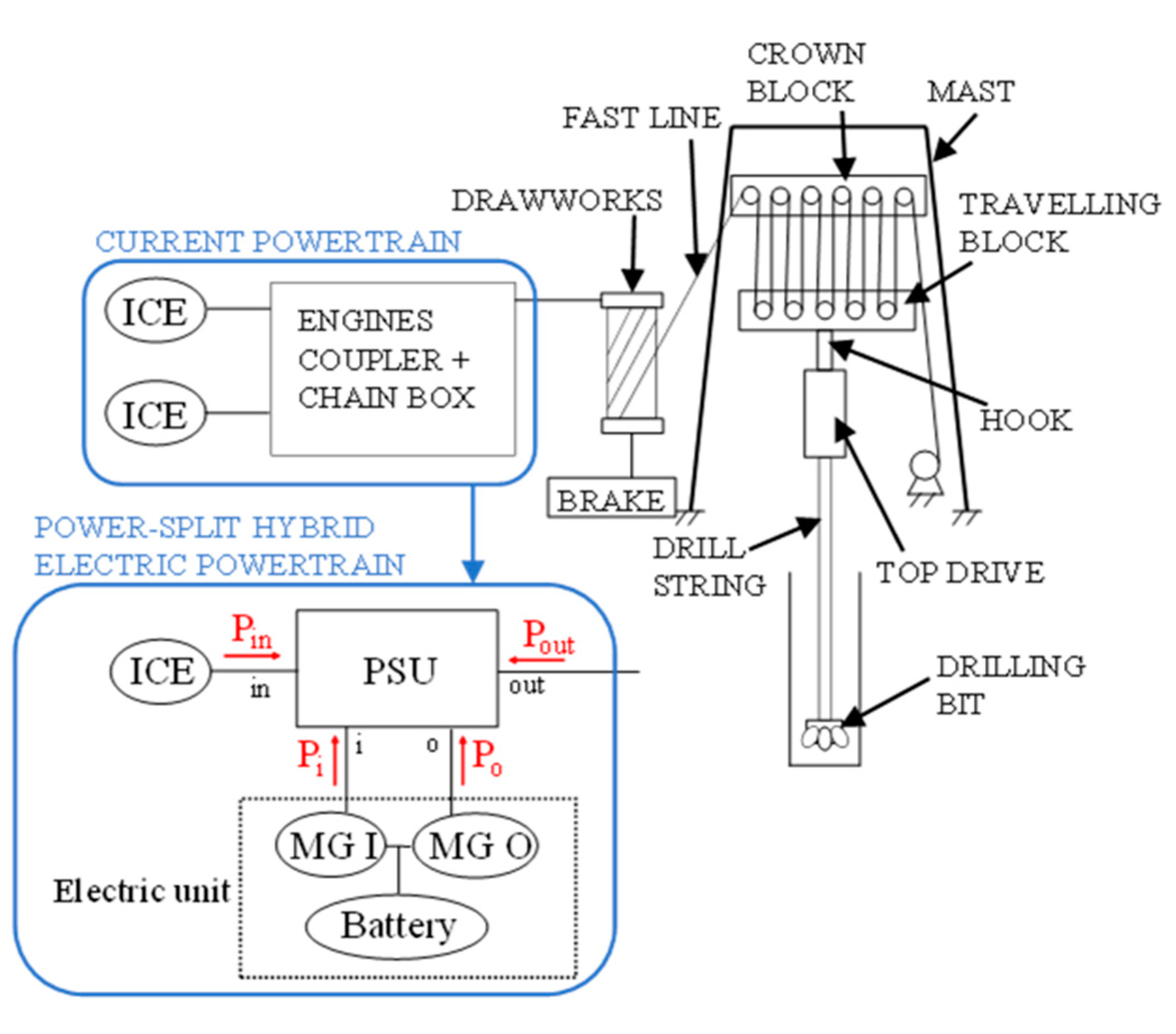
The hoisting mechanism (
Figure 1) relies on a drawworks, namely, a large winch that reels out and in the drilling line in a controlled fashion. The drilling line is winded on the crown block and the traveling block. The latter carries the top-drive and hook block that raises or lowers the drilling stem. The raising phases are powered by two diesel engines with 403 kW rated power each. The prime movers’ power flows combine together in an engine coupler and then in a chain box connected to the winch. The lowering phases are gravity-driven, and a brake system ensures the adequate descending speed of the drill stem. However, introducing an electric unit upstream of the drawworks would enable regenerative braking instead of dissipative friction braking to recover energy while the drill stem is lowered into the wellbore. Thus, our research aims to replace the diesel prime movers and the compound block with a hybrid electric power-split powertrain (
Figure 1) to recover braking energy and reduce the thermal power needed thanks to the addition of the batteries as a further power source. Therefore, one design requirement of this work is to keep only one diesel ICE in the hybridized rig. Moreover, the power-split unit decouples the ICE speed from the winch speed; hence, the ICE can continuously operate in its most efficient range.
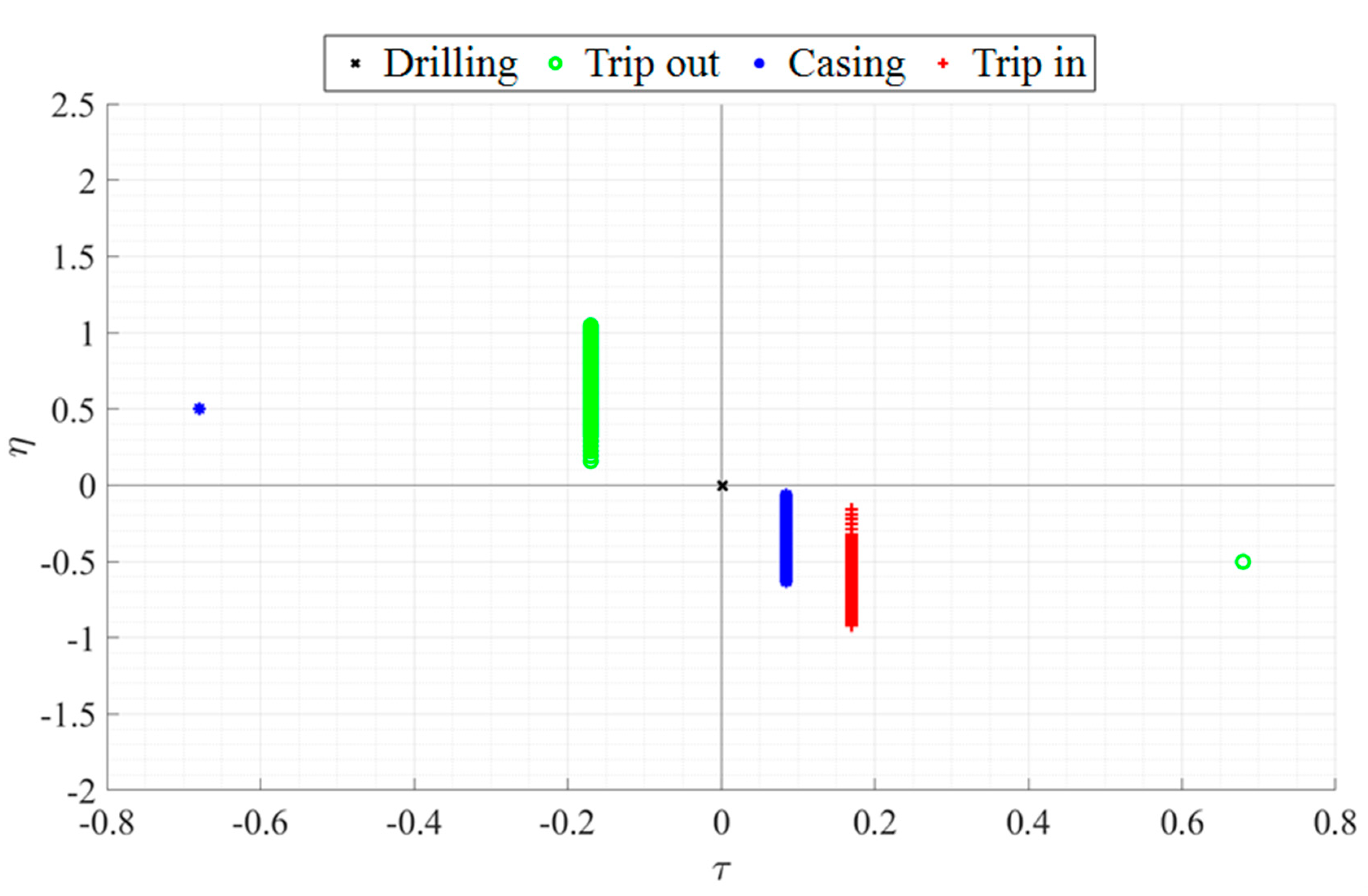
To design the power-split transmission properly, it is essential to know the speed, torque, and power required on the output shaft. For this purpose, we simulated a 3000 m deep drilling with intermediate casing at 500, 1500, and 2500 m. The series of operations to perform to complete an intermediate casing are the following:
DRILLING: the drill string is slowly lowered into the wellbore while the top-drive provides the drill bit with the torque to drill. When the drilling depth equals the drill string length, the drill string is blocked into the wellbore while the top-drive and hook block alone are raised to attach two more drill pipes and resume drilling.
TRIP OUT: the top-drive and hook block are raised to pull out of the hole (POOH) the drill string. When a double stand of drill pipes comes out of the wellbore, it is removed from the top-drive and hook block, which then are lowered to lift the remaining drill string.
CASING: a joint of two casing pipes is lowered into the wellbore; then, the top-drive and hook block are raised to pick up another joint and repeat the operation. When the casing pipes into the wellbore reach the bottom of the wellbore, they are cemented.
TRIP IN: the drill string is run into the hole (RIH), starting from the drill collars, which are thicker than the drill pipes to provide the weight on the bit (WOB). When a double stand of drill collars or drill pipes is completely lowered into the wellbore, the top-drive and hook block are raised to pick up another double stand and repeat the operation until the drill string occupies the whole wellbore length. Then, the drilling phase can restart.
To simplify the analysis, we assumed a realistic constant speed for the top-drive and hook block in each phase, shown in
Table 1 and derived from [
29].
The hook load was simulated by considering the weight of the hook, the top-drive, the casing pipes during the casing phase, and the drill collars and drill pipes during the tripping phases, reduced by the WOB and the buoyancy factor due to the immersion in drilling fluid during the drilling phase. The constructive parameters used in this analysis are reported in
Table 2 and deduced from [
29]. Any inertial effects or other disturbances were neglected.
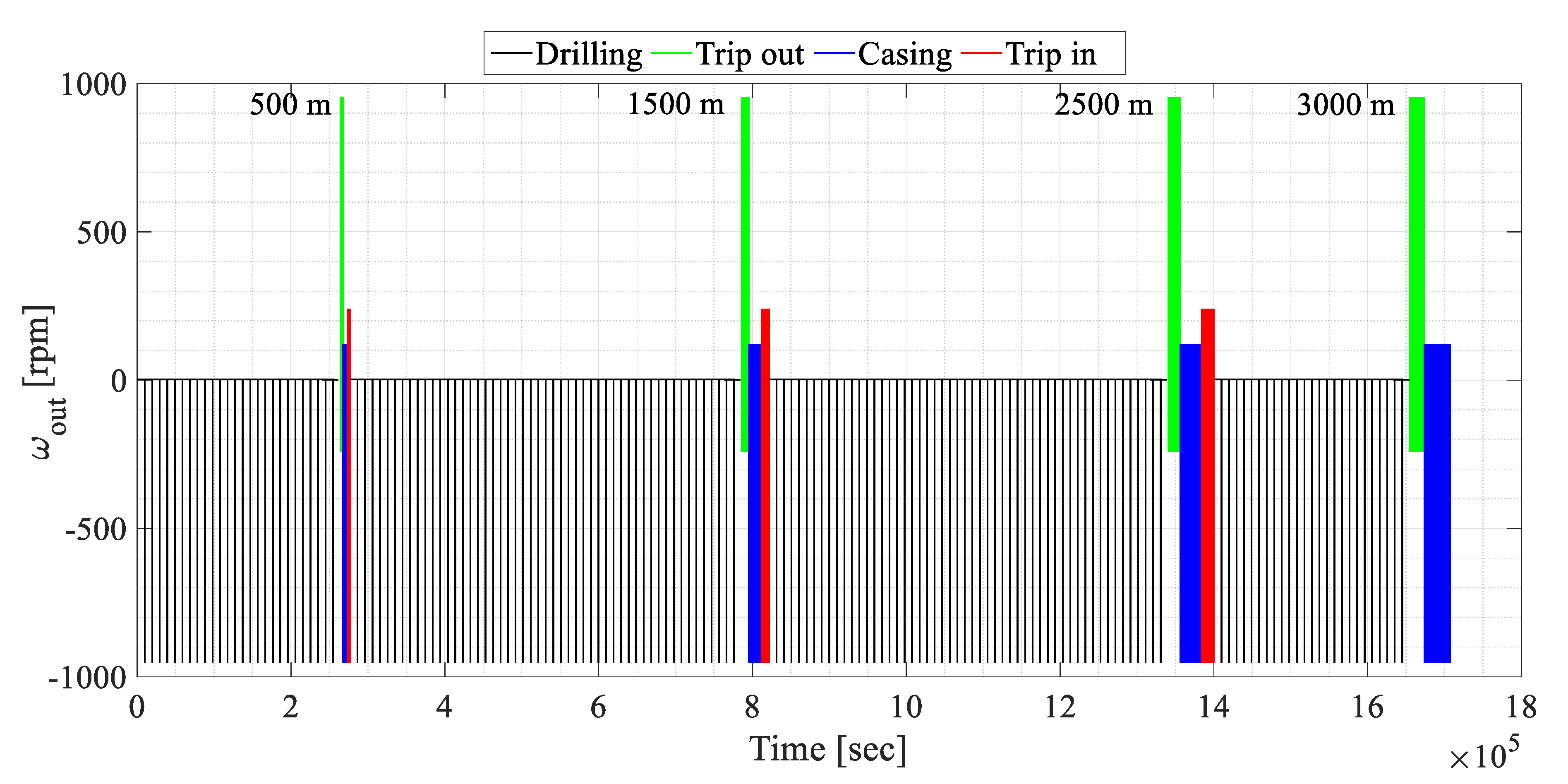
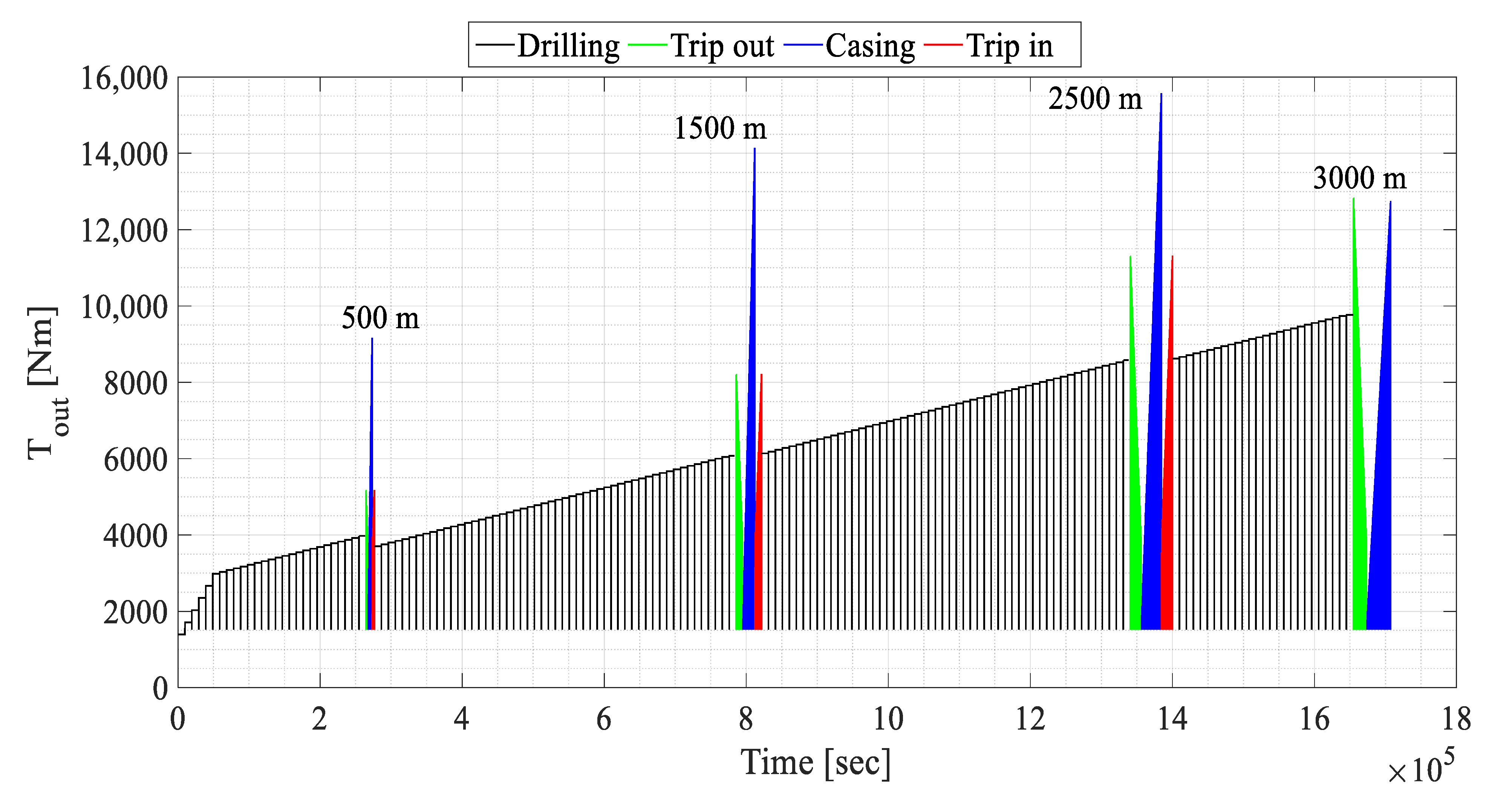
From data in
Table 1 and
Table 2, the linear speed, force, and power on the hook can be assessed and then reduced in terms of rotational speed, torque, and power on the PSU output shaft. The results shown in
Figure 2,
Figure 3 and
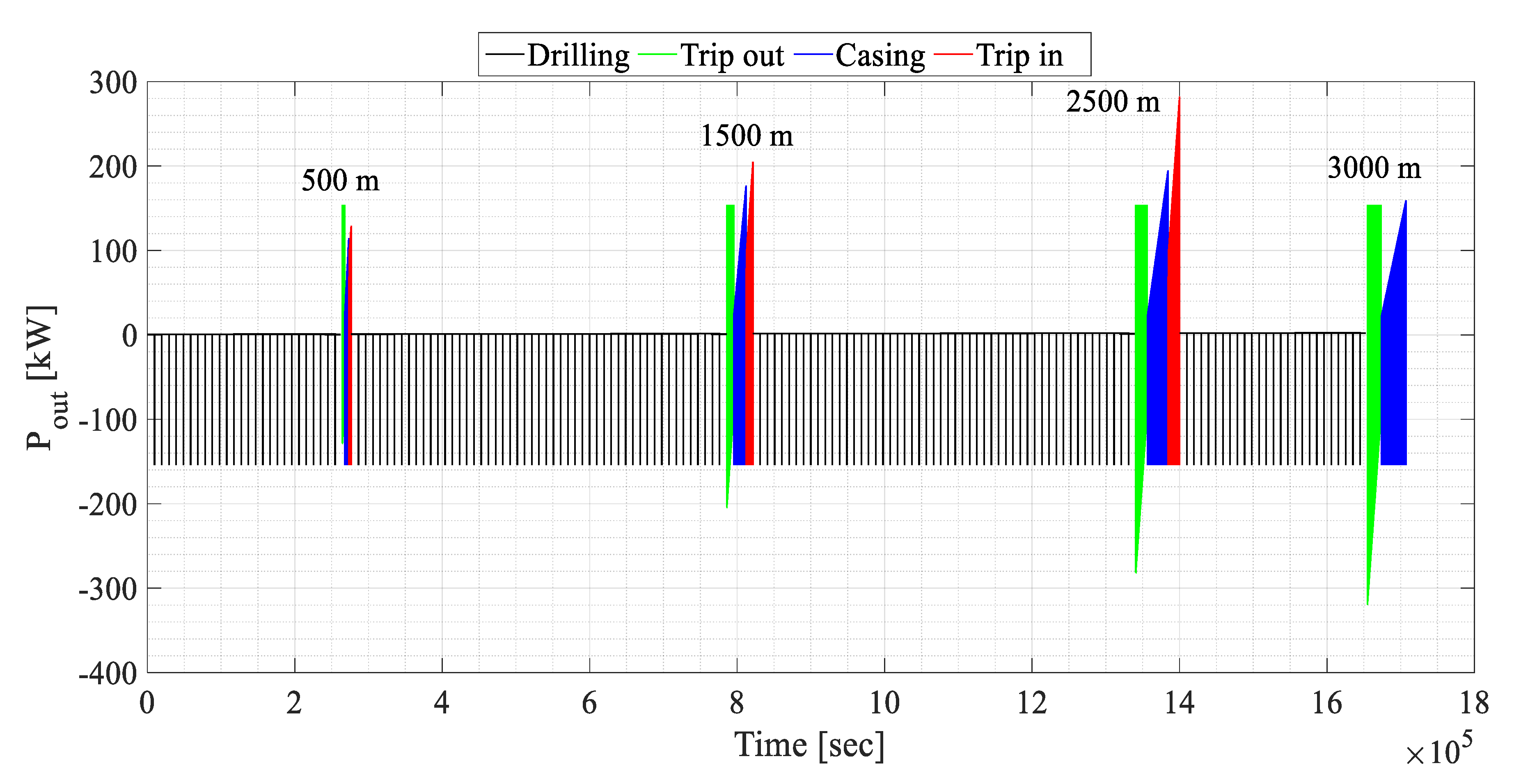
Figure 4 were obtained by considering the overall transmission ratio of 0.00800 m between the hook and the PSU output shaft and the overall efficiency of 0.845. From a simplified perspective, we omitted any bit trip for inspection and replacement of a worn or underperforming drill bit; nevertheless, it would have implied additional POOH and RIH phases during drilling.
On the basis of the red arrows in
Figure 1 showing that a power flow is positive if entering the PSU, from
Figure 4, it is easy to identify the raising phases (
) during which the PSU has to provide power and the lowering phases (
) when energy recovery can be realized.
2.2. Parametric Model for Power-Split Transmissions: A Modular Procedure for the Design
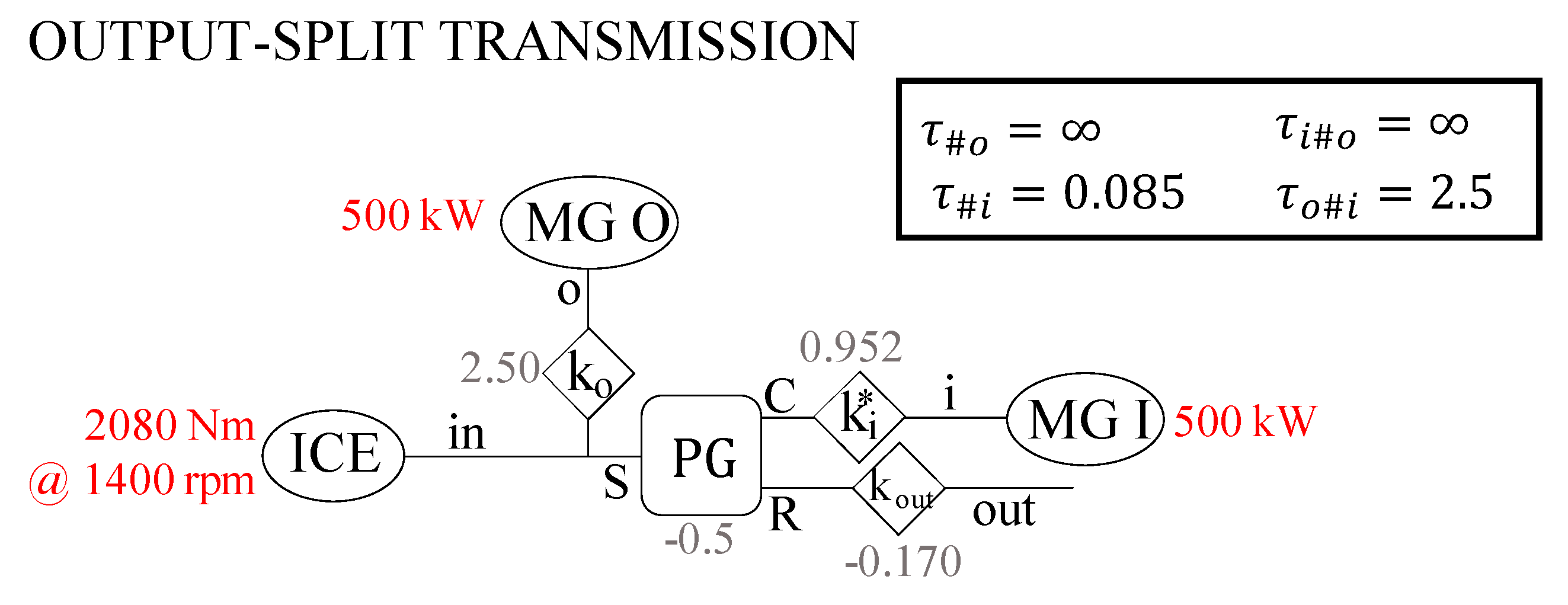
Power-split transmissions differ in the number and the arrangement of PGs, OGs, and clutches and brakes if multimode operations are available. A shunt power-split transmission consists of only one PG, while a compound PSU contains two or more PGs. However, despite the different constructive layout, any PSU can be modeled as a four-port black box connected to the ICE (by the
in shaft), the output load (by the
out shaft), and the electric machines MG I and MG O (by the
i and
o shafts, respectively) [
22] (see
Figure 1). In the shunt configuration, two of the four PSU main shafts have proportional speed; in particular, one electric machine (
i or
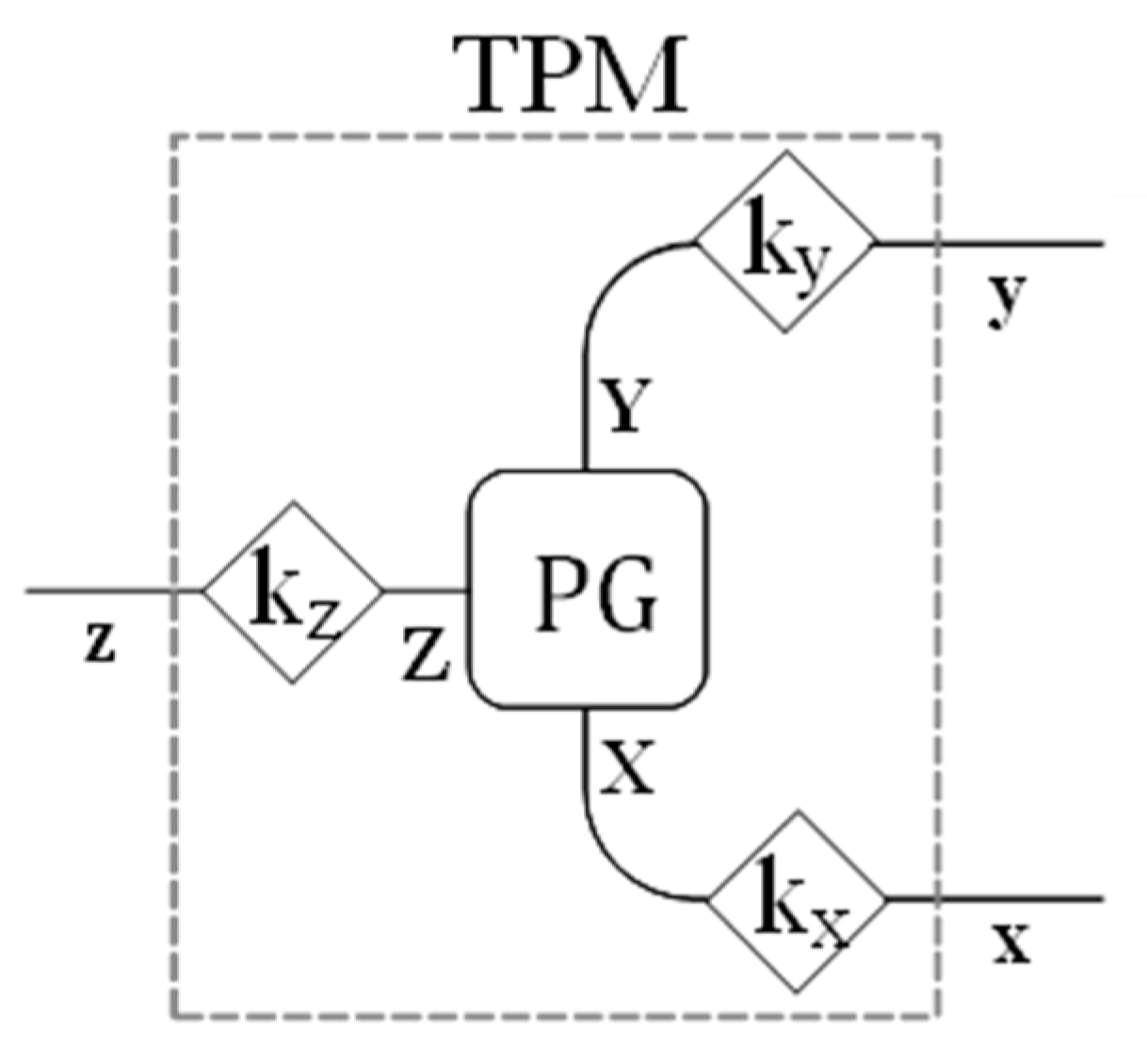
o shaft, alternatively) can rotate proportionally to the ICE or the output load, realizing an output-split or an input-split configuration, respectively. Moreover, the PSU can be modeled as a combination of three-port mechanisms (TPMs), consisting of one PG and up to three OGs (
Figure 5). The PG branches (carrier, ring gear, and sun gear) are generically indicated by upper-case letters (
X,
Y,
Z), while the PSU main ports (
in,
out,
i,
o) are indicated by lowercase letters (
x,
y,
z).
The design procedure proposed in [
22] can be used for the functional design of a single-mode shunt and compound PSU with up to two TPMs. It relies on the parametric model described in [
22,
24] based on functional parameters that rule the speed, torque, and power relationships among the PSU shafts, thus fully characterizing the PSU behavior. These functional parameters are the nodal ratios and the corresponding speed ratios.
Assuming that
is the overall speed ratio between the PSU output and input shafts, the nodal ratio
is the overall speed ratio
achieved when the generic
kth shaft is motionless:
Note that and by definition. The nodal ratios and are also called mechanical points.
Assuming that
is the speed ratio between the
jth PSU shaft and the input, the corresponding speed ratio
is the speed ratio
achieved when the generic
kth shaft is motionless:
In the analysis stage, the known constructive arrangement of the mechanical devices inside the PSU leads to the identification of a univocal set of functional parameters [
24]. Nonetheless, in the design stage, the same set of functional parameters matches several constructive solutions [
22]. Therefore, pursuing a modular and hierarchical approach by decoupling the design phases is crucial to avoid mutual interferences between the actuator sizing and the gear sets synthesis while meeting the operative requirements. Hence, after identifying the system operating points, the functional parameters can be selected before synthesizing the PSU constructive arrangement. In particular, the selection of the mechanical points affects the electric machines’ power size and the PSU kinematics relations. The latter are used to synthesize the PGs constructive arrangement. Then, the corresponding speed ratios are selected to define the speed and torque ratios between the PSU ports. Lastly, the OGs necessary to meet the kinematics requirements are assessed.
In the following, the design procedure is described in detail:
- 5.
IDENTIFICATION OF THE OVERALL SPEED AND POWER RATIOS: the operations of the ICE and the output load are defined to assess the overall speed ratio and the overall power ratio :
Given the positive power sign of
Figure 1 and considering always that
, the PSU provides power to the output if
, while energy recovery may be realized if
. Moreover, if
, the power required in the output is higher than the ICE power; thus, the battery cooperates with the ICE to fulfill the output power demand.
and
are the independent variables ruling the addressed mathematical treatment.
- 6.
MECHANICAL POINTS SELECTION AND ELECTRIC MACHINES’ POWER SIZE: the power flows of the electric machines ( and ) are ruled only by the mechanical points:
The previous equations show that operating at the mechanical point
(or
) implies that the MG I (or MG O) power is null. Hence, choosing a long-lasting speed ratio as a mechanical point would reduce the electromechanical conversions and the related power losses by improving overall efficiency. This consideration along with Equations (5) and (6) allow the designer to prioritize the electric machines sizing by properly selecting the mechanical points upstream of the design process [
22]. For example, selecting the combination of mechanical points that minimizes the electric machine rated power could be particularly cost-effective given the high prices of electric equipment. Nonetheless, it should be noted that the number of nodal ratios available in the design stage equals the number of TPMs in the PSU. Thus, for a two-PG compound PSU, both mechanical points can be freely selected, while for a shunt PSU, only one. Indeed, in an input-split transmission where the MG I speed (or MG O) is proportional to the output speed, only
(or
) can be freely chosen since
(or
). Similarly, in an output-split transmission where the MG I speed (or MG O) is proportional to the input speed, only
(or
) can be freely chosen since
(or
). If the PSU contains more than two TPMs, further nodal ratios than the two mechanical points should be defined, but this scenario is not addressed in this paper.
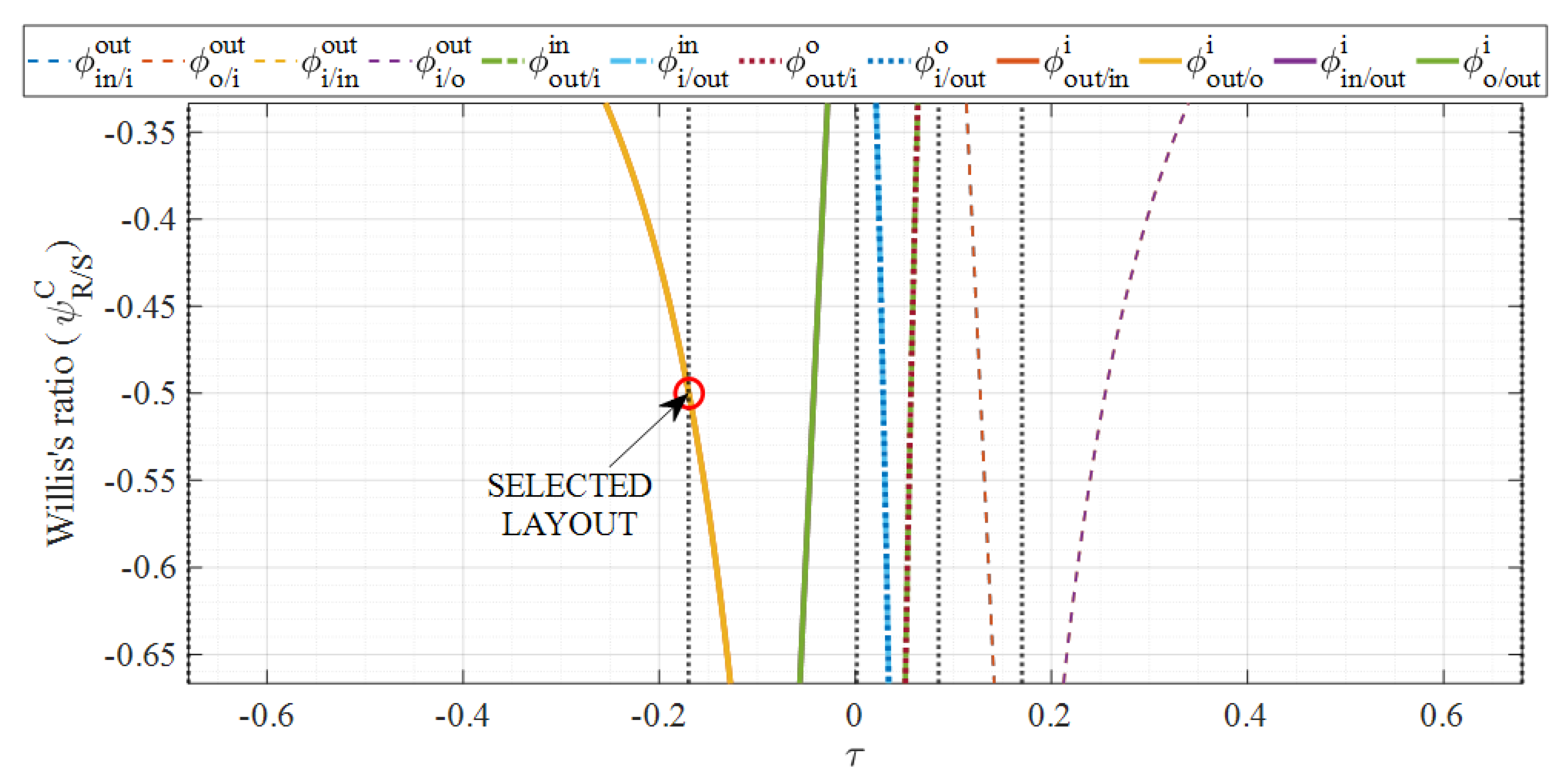
- 7.
DESIGN CHART AND PLANETARY GEARING SYNTHESIS: the nodal ratios rule the so-called characteristic functions, defined as the speed ratio between two generic TPM branches when the third one is motionless to the same speed ratio when the third shaft is moving:
In [
22], it was demonstrated that:
where
is the ratio between
and
of the PG achieved when
. As a result,
is the Willis’ ratio by definition. Thus, plotting all the characteristic functions within the desired range of
by limiting the Y-axis within the desired PG Willis’ ratio range leads to the definition of a design chart for the PGs synthesis. In the design phase, choosing one point from the
characteristic curve implies the selection of the synchronous condition
of a PG and its respective Willis’ ratio, besides the connection between its carrier, ring gear, and sun gear with the
z,
x, and
y PSU ports, respectively [
22]. For shunt transmissions, only one point has to be selected and some characteristic curves overlap due to the coincidence of one mechanical point with
(input-split) or
(output-split). Instead, for two-PG compound transmissions, two PGs have to be synthesized by choosing points from two different curves in such a way that each PSU port (
in,
out,
i,
o) appears at least once among the
x,
y, and
z indices of the selected curves. Thanks to the design chart, the designer can select the PG synchronism within the PSU operating range to maximize the transmission mechanical efficiency [
25]. In addition, the PG Willis’ ratio can be chosen within the most suitable range, ideally within
and
because of efficiency and constructive reasons [
22,
25]. The design chart enables a quick comparison among the viable layouts; thus, it is possible to detect the possibility of choosing two identical PGs for a cost-effective synthesis of a compound transmission [
40]. Furthermore, the PGs synthesis is performed without directly involving the OGs, which have not been synthesized yet.
- 8.
CORRESPONDING SPEED RATIOS SELECTION: the corresponding speed ratios rule the speed and torque ratios at the PSU ports along with the nodal ratios. Indeed, the MG I and MG O speeds are:
while the MG I and MG O torques are:
Consequently, the corresponding speed ratios should be chosen to comply with the speed and torque constraints imposed by the actuators’ operating range. However, it should be noted that for an output-split transmission where the MG I speed (or MG O) is proportional to the input speed, (or ) by definition and only one corresponding speed ratio can be freely selected.
- 9.
ORDINARY GEARING SYNTHESIS: after selecting both nodal and corresponding speed ratios, the PSU kinematics is fully characterized. The OGs on each TPM branch must be synthesized to ensure that the kinematic constraints are satisfied during PG synchronism, as demonstrated in [
22]. Therefore, the fixed ratios of the OGs belonging to the same TPM are ruled by the following equations:
where
,
, and
. After calculating the ratios of Equations (13) and (14), one OG can be chosen arbitrarily, e.g., equal to 1 to simply the constructive arrangement, while the others are assessed subsequently. Further strategies for pursuing constructive simplicity, especially in a compound-split layout, are suggested in [
22].






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}