End Effects and Geometric Compensation in Linear Permanent Magnet Synchronous Generators with Different Topologies †


Abstract
:1. Introduction
2. Method
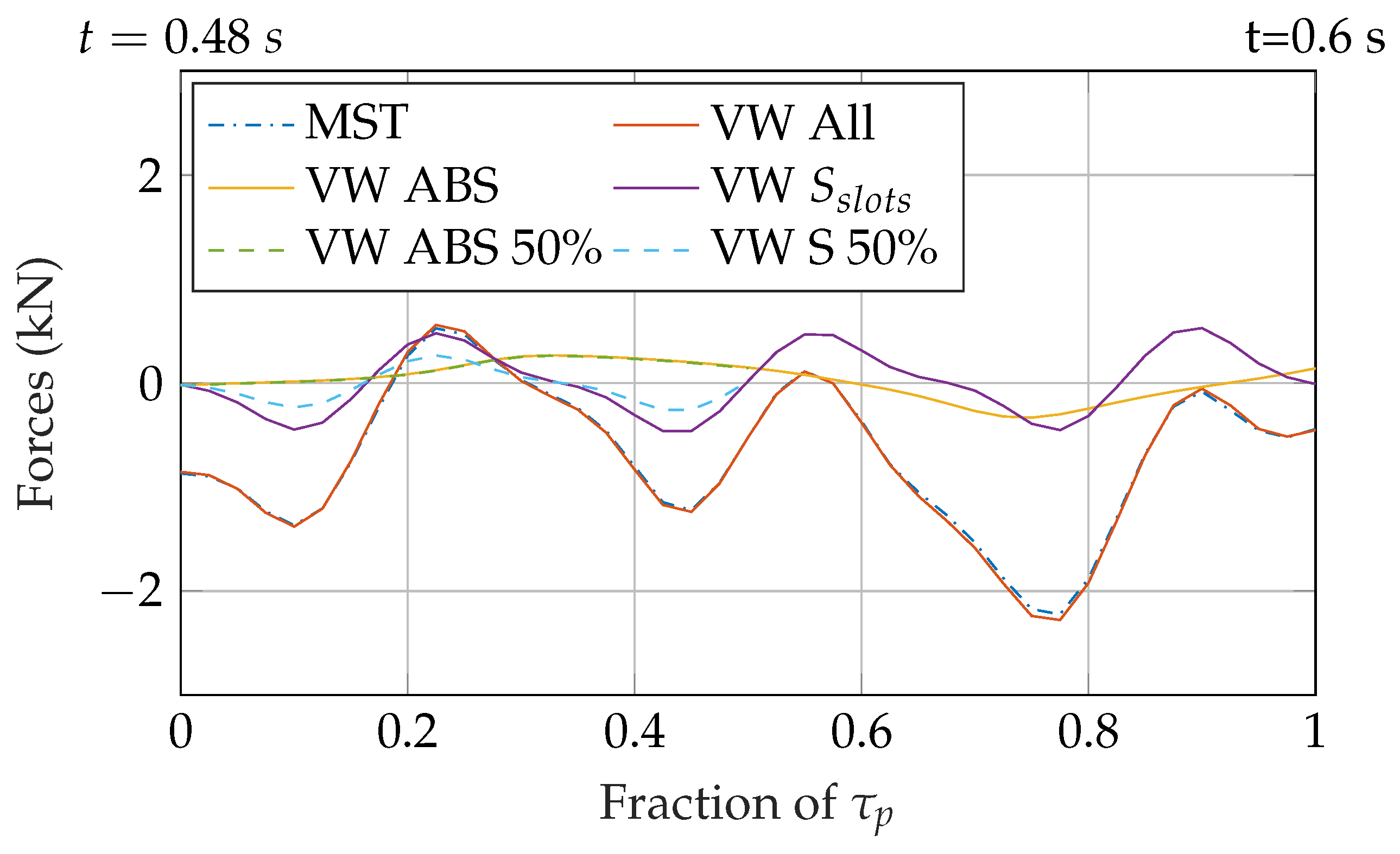
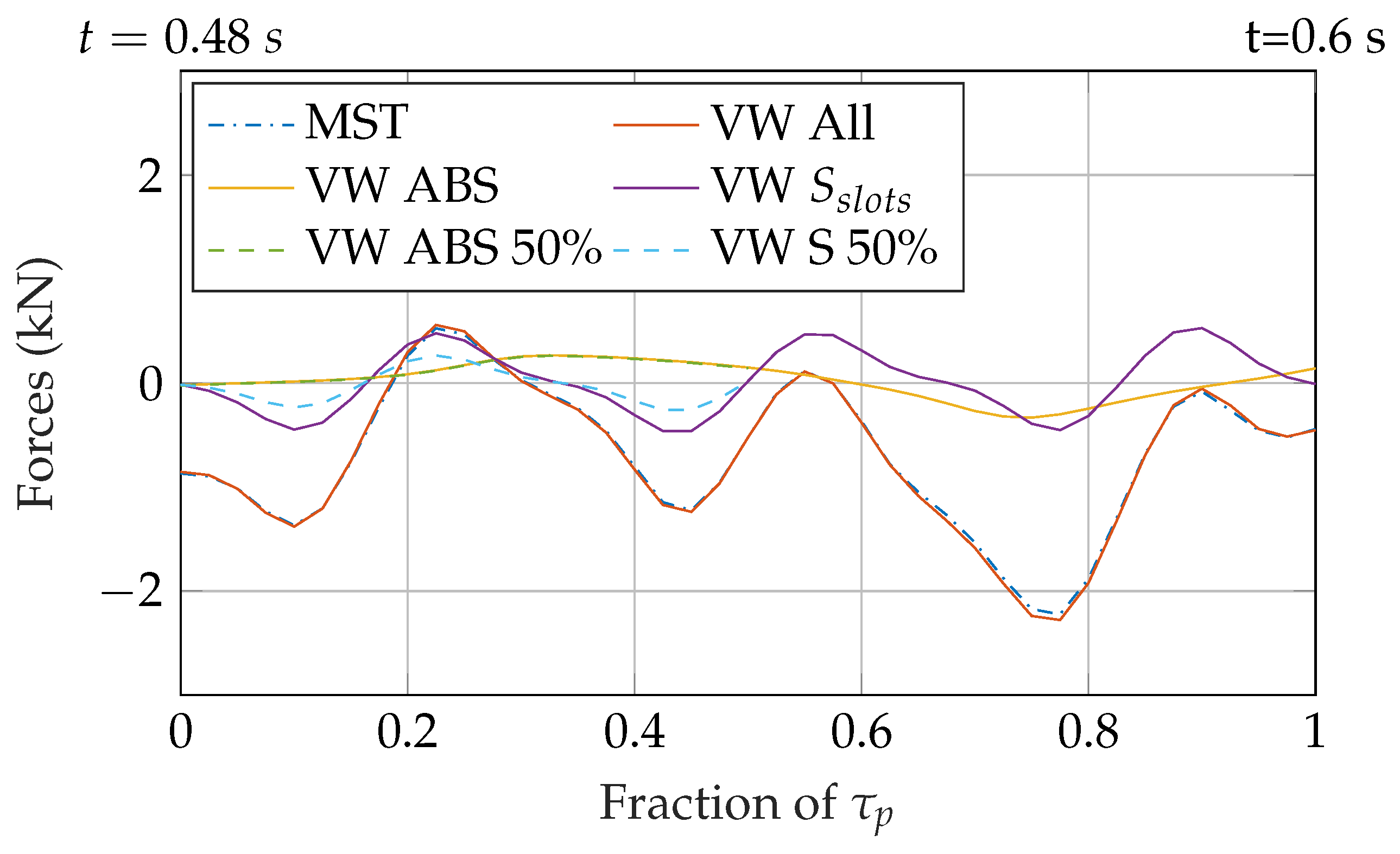
2.1. Force Calculations
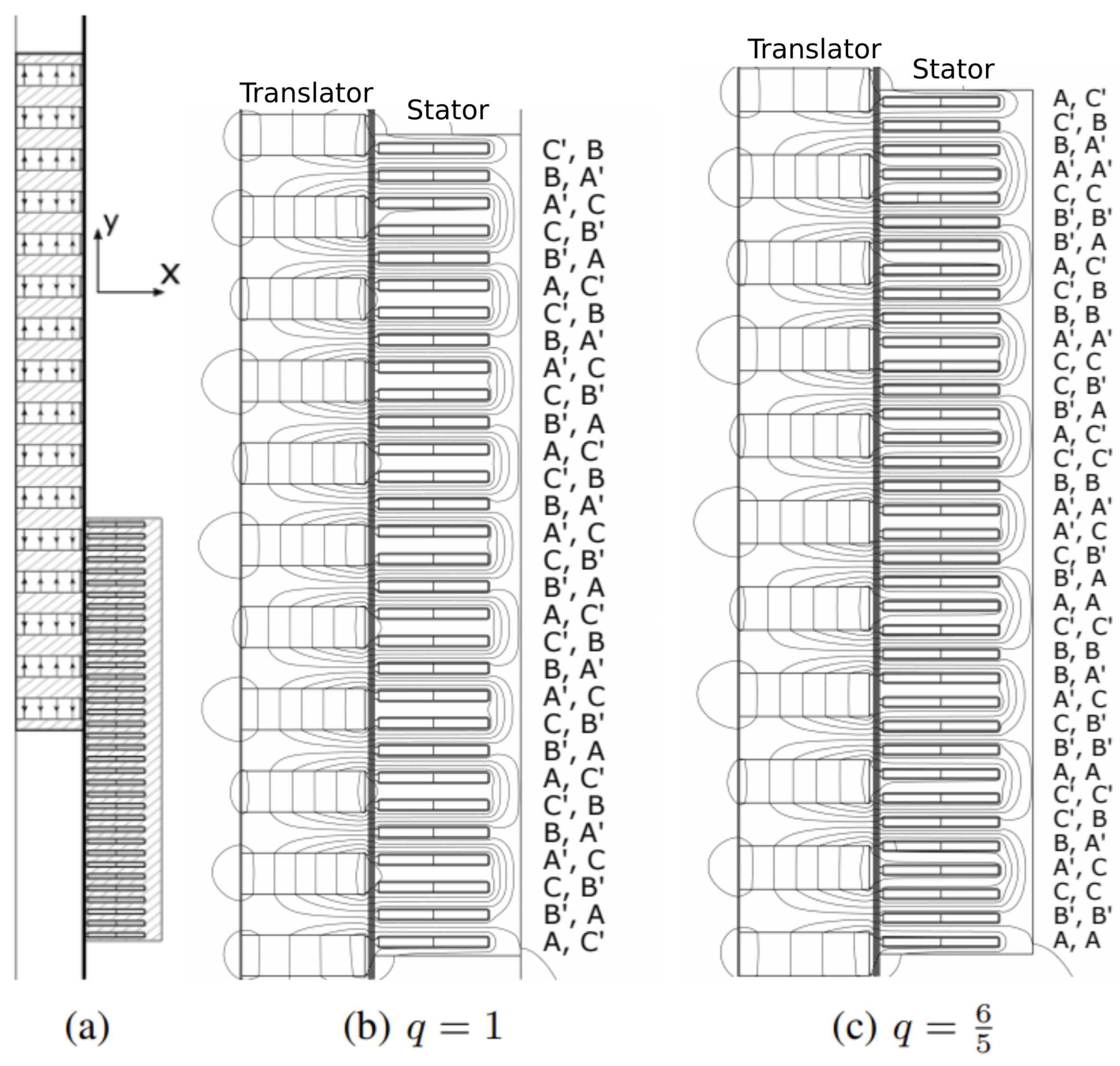
2.2. Finite Element Simulations
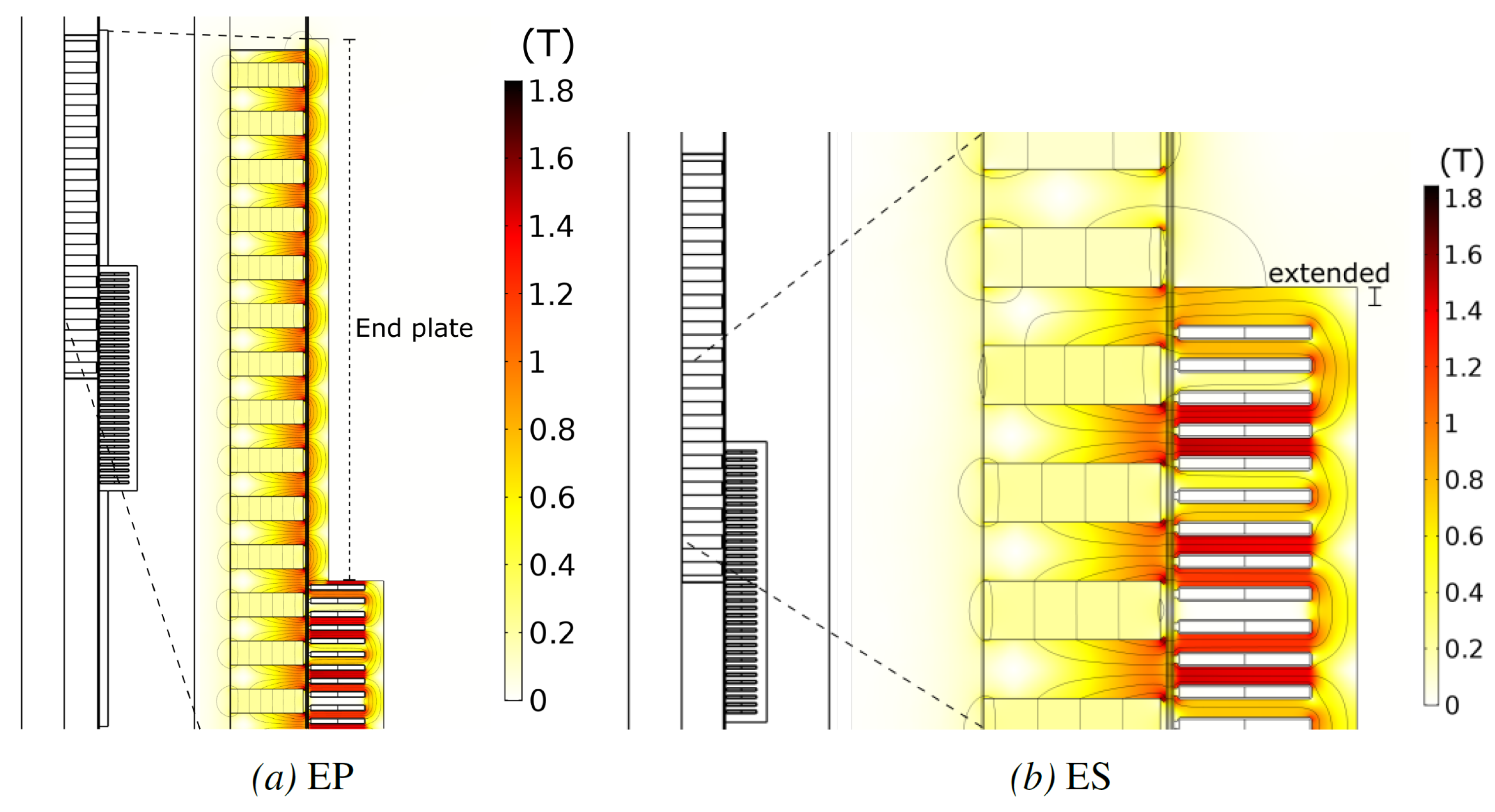
2.3. End Effect Compensation
2.4. Comparison of Force Reduction between Buried and Surface Topology under No-Load and Load Conditionz
3. Results and Discussion
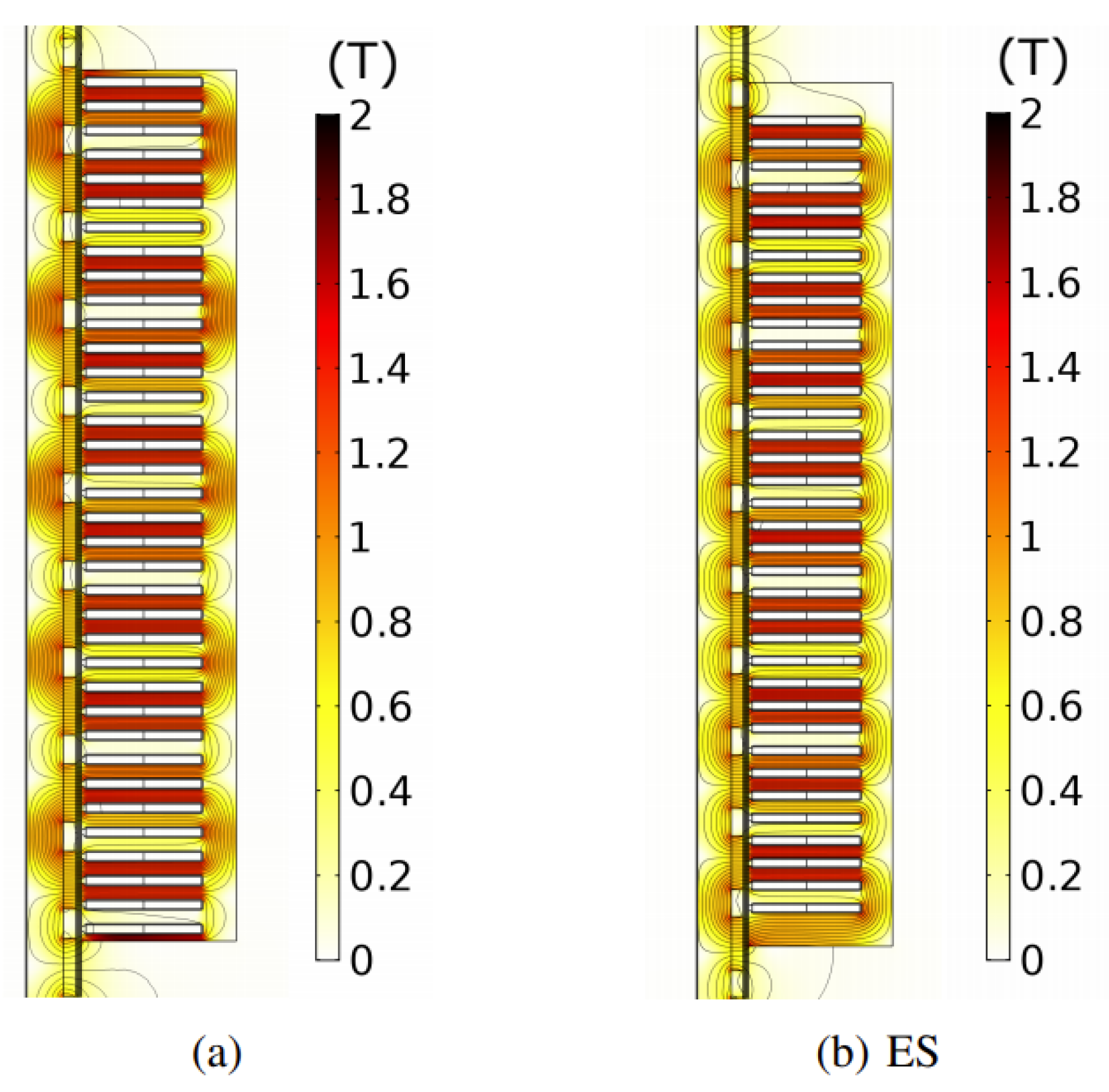
3.1. Buried Topology without End Region Alterations
3.2. Force Reduction for Buried Topology with Different Winding Patterns
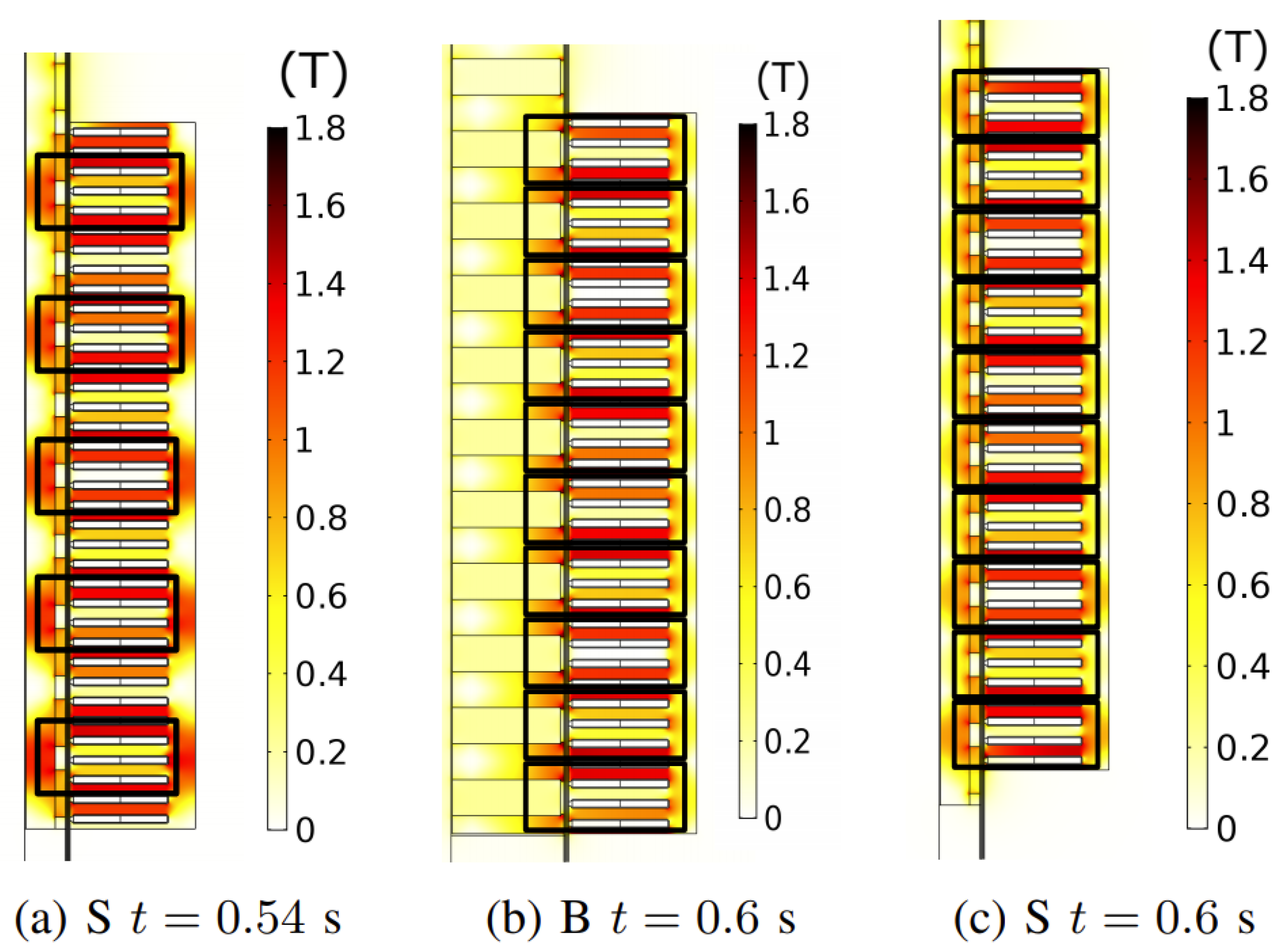
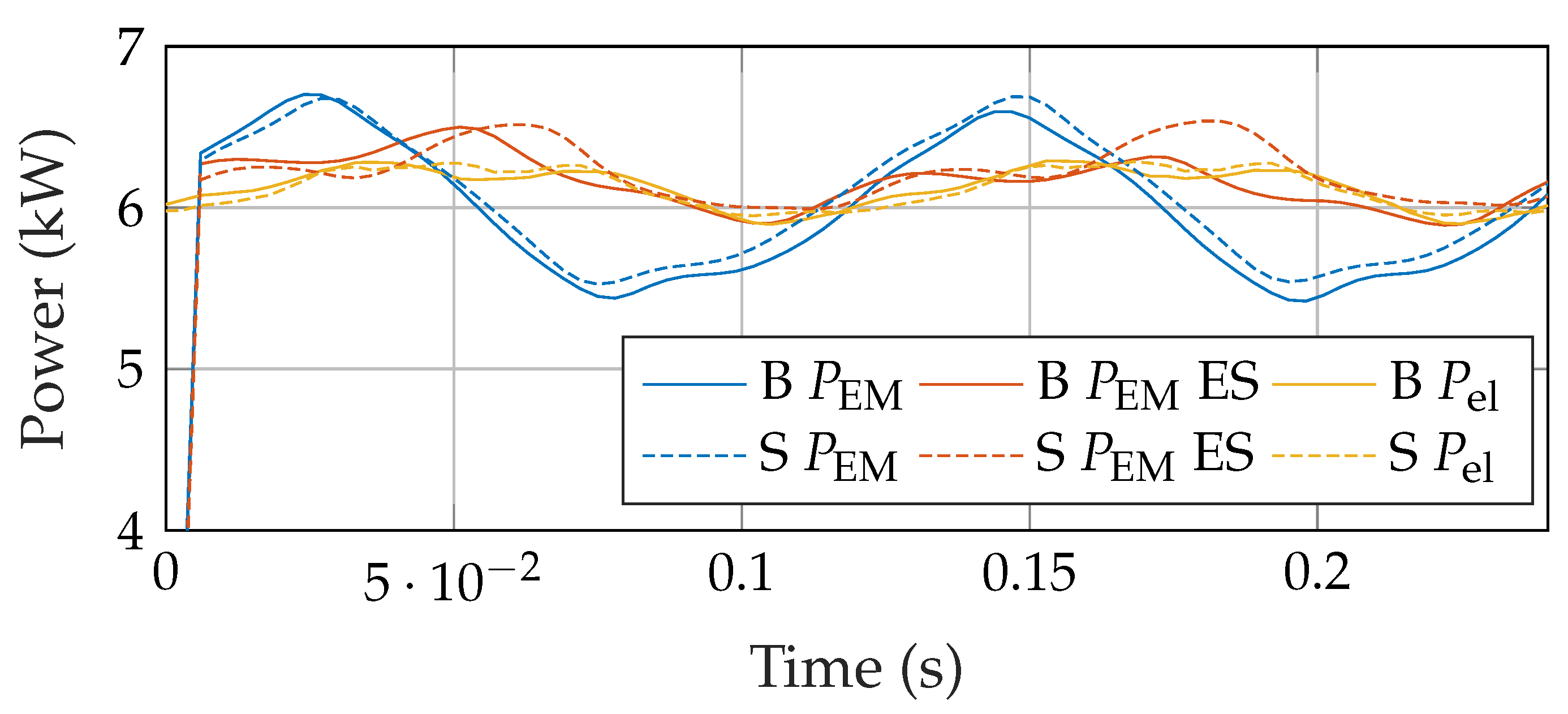
3.3. Comparison in Force Reduction between Buried and Surface Topology and under Load Condition
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABS | Above and below the stator |
| PM | Permanent Magnet |
| LPMSG | Linear Permanent Magnet Synchronous Generator |
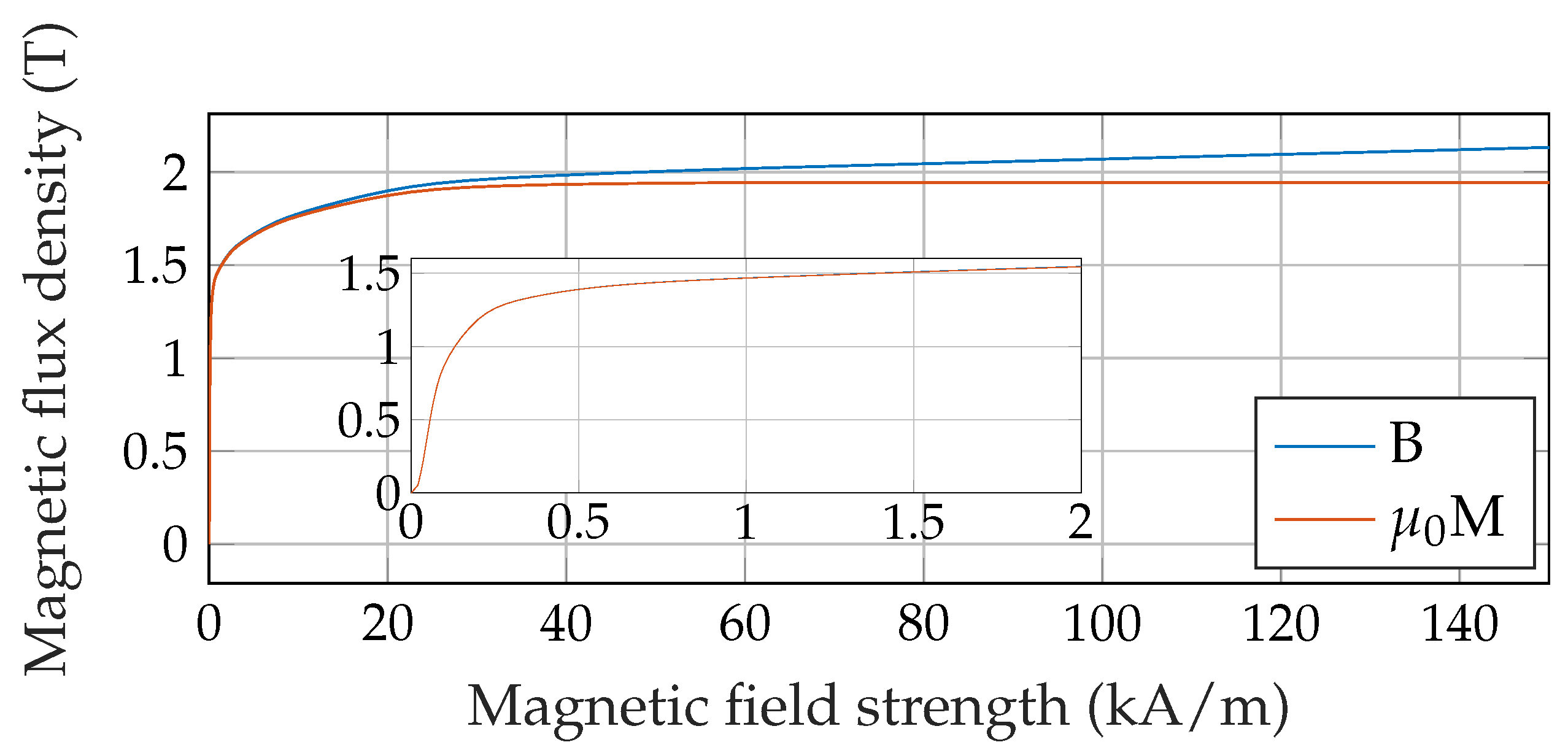
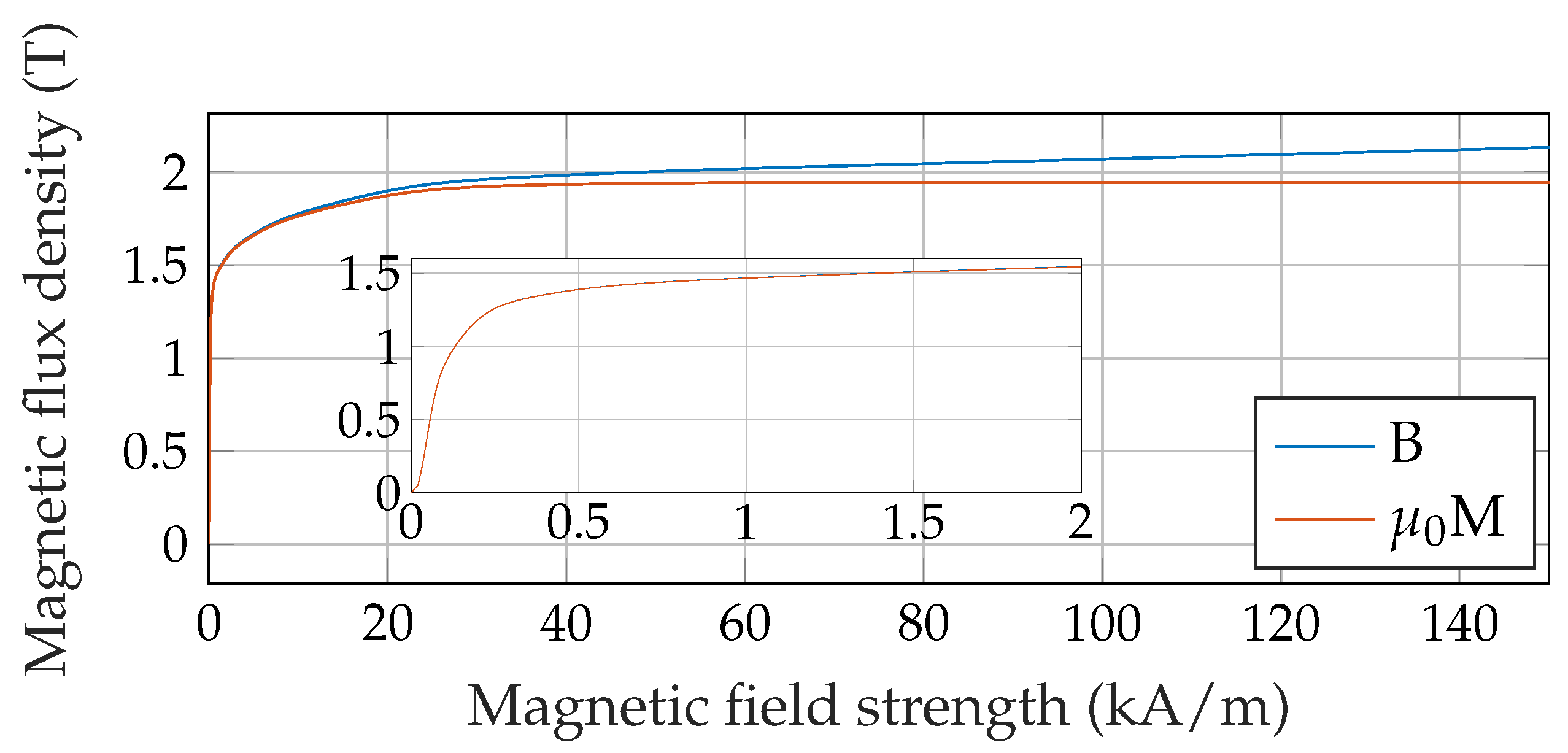
| BH | Magnetic flux density-Magnetic field strength dependency |
| MST | Maxwell’s Stress Tensor |
| VW | Virtual Work |
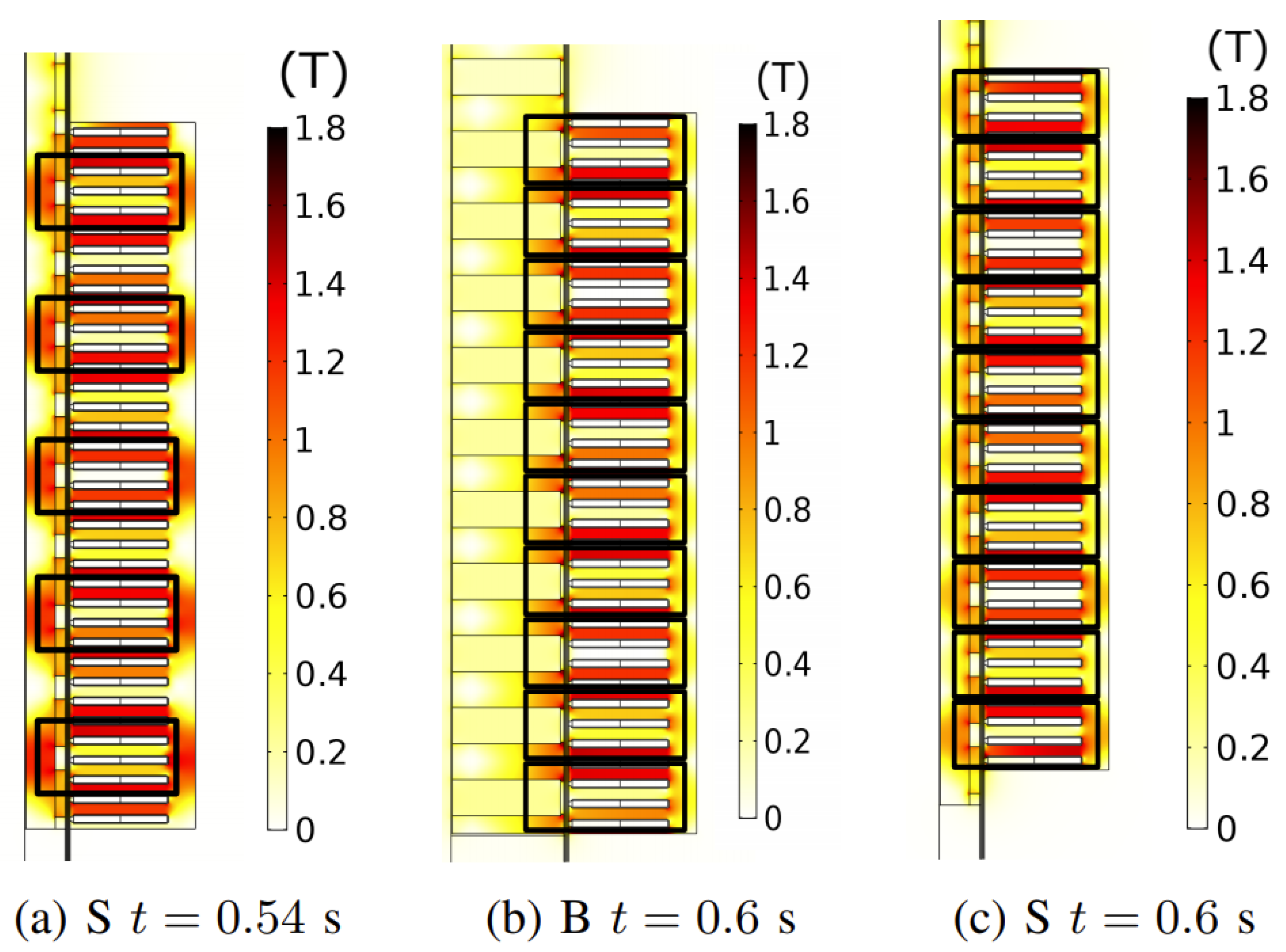
| B | Buried (translator topology) |
| S | surface-mounted (translator topology) |
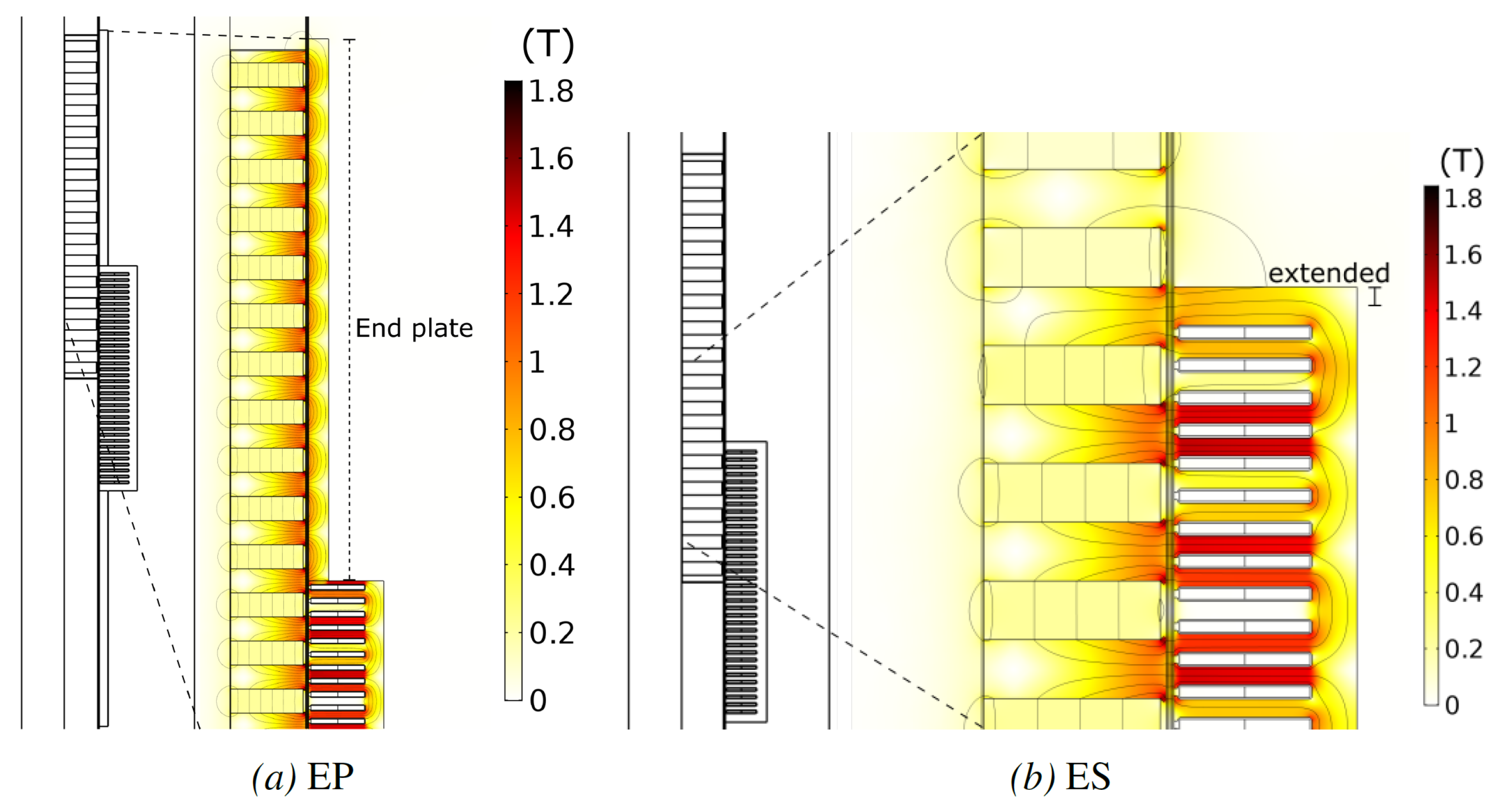
| EP | End plates |
| ES | Extended stator |
References
- Sjölund, J.; Frost, A.E.; Leijon, M.; Eriksson, S. End Effects and Geometric Compensation in a Linear Permanent Magnet Synchronous Generator with Buried Topology. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; Volume 1, pp. 455–461. [Google Scholar] [CrossRef]
- Danielsson, O.; Leijon, M. Flux Distribution in Linear Permanent-Magnet Synchronous Machines including Longitudinal End Effects. IEEE Trans. Magn. 2007, 43, 3197–3201. [Google Scholar] [CrossRef]
- Liu, C.; Gao, H.; Xiong, Y.; Zhou, S.; Fu, W. Detent Force Reduction in Permanent Magnet Linear Synchronous Motor Base on Magnetic Field Similarity Method. IEEE Access 2019, 7, 57341–57348. [Google Scholar] [CrossRef]
- Lejerskog, E.; Strömstedt, E.; Savin, A.; Boström, C.; Leijon, M. Study of the Operation Characteristics of a Point Absorbing Direct Driven Permanent Magnet Linear Generator deployed in the Baltic Sea. IET Renew. Power Gener. 2016, 10, 1204–1210. [Google Scholar] [CrossRef] [Green Version]
- Ekergård, B.; Leijon, M. Longitudinal End Effects in a Linear Wave Power Generator. Energies 2020, 13, 327. [Google Scholar] [CrossRef] [Green Version]
- Frost, A.E.; Ulvgård, L.; Sjökvist, L.; Eriksson, S.; Leijon, M. Partial Stator Overlap in a Linear Generator for Wave Power: An Experimental Study. J. Mar. Sci. Eng. 2017, 5, 53. [Google Scholar] [CrossRef] [Green Version]
- Yu, H.; Liu, C.; Yuan, B.; Hu, M.; Huang, L.; Zhou, S. A Permanent Magnet Tubular Linear Generator for Wave Energy Conversion. J. Appl. Phys. 2012, 111, 07A741. [Google Scholar] [CrossRef]
- Almoraya, A.A.; Baker, N.J.; Smith, K.J.; Raihan, M.A.H. Development of a Double-sided Consequent Pole Linear Vernier Hybrid Permanent-Magnet Machine for Wave Energy Converters. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Almoraya, A.A.; Baker, N.J.; Smith, K.J.; Raihan, M.A.H. A New Configuration of a Consequent Pole Linear Vernier Hybrid Machine with V-shape Magnets. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 2002–2008. [Google Scholar] [CrossRef]
- Huang, X.; Ji, T.; Li, L.; Zhou, B.; Zhang, Z.; Gerada, D.; Gerada, C. Detent Force, Thrust, and Normal Force of the Short-Primary Double-Sided Permanent Magnet Linear Synchronous Motor With Slot-Shift Structure. IEEE Trans. Energy Convers. 2019, 34, 1411–1421. [Google Scholar] [CrossRef]
- Hultman, E.; Ekergård, B.; Kamf, T.; Salar, D.; Leijon, M. Preparing the Uppsala University Wave Energy Converter Generator for Large-scale Production. In Proceedings of the 5th International Conference on Ocean Energy, Halifax, NS, Canada, 4–6 November 2014. [Google Scholar]
- Kamf, T. Automated Production Technologies and Measurement Systems for Ferrite Magnetized Linear Generators. Ph.D. Thesis, Acta Universitatis Upsaliensis, Uppsala, Weden, 2017. [Google Scholar]
- Ekergård, B.; Leijon, M. Ideal Analytical Expression of the Magnetic Circuit in a Permanent Magnet Linear Machine. In Proceedings of the 2013 Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 27–30 March 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Lu, Q.; Huang, L.; Ye, Y.; Huang, X.y.; Fang, Y. Design of a Novel Permanent Magnet Linear Synchronous Motor with Segmented Armature Core for Ropeless Lifter. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2016, 35, 556–571. [Google Scholar] [CrossRef]
- Xia, T.; Yu, H.; Shi, Z.; Guo, R. Comparative Analysis and Experimental Verification of a Linear Tubular Generator for Wave Energy Conversion. Energies 2018, 11, 1707. [Google Scholar] [CrossRef] [Green Version]
- Botha, C.D.; Kamper, M.J.; Wang, R.J.; Sorgdrager, A.J. Force Ripple and Cogging Force Minimisation Criteria of Single-Sided Consequent-Pole Linear Vernier Hybrid Machines. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; Volume 1, pp. 469–475. [Google Scholar] [CrossRef]
- Yao, Y.; Chen, Y.; Lu, Q.; Huang, X.Y.; Ye, Y. Analysis of Thrust Ripple Harmonics on different Electric Loadings in PM Linear Synchronous Machines with Skewed PMs. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2016, 35, 655–669. [Google Scholar] [CrossRef]
- Polinder, H.; Damen, M.E.; Gardner, F. Linear PM Generator System for Wave Energy Conversion in the AWS. IEEE Trans. Energy Convers. 2004, 19, 583–589. [Google Scholar] [CrossRef] [Green Version]
- Ulvgård, L.; Sjökvist, L.; Göteman, M.; Leijon, M. Line Force and Damping at Full and Partial Stator Overlap in a Linear Generator for Wave Power. J. Mar. Sci. Eng. 2016, 4, 81. [Google Scholar] [CrossRef] [Green Version]
- Pile, R.; Devillers, E.; Le Besnerais, J. Comparison of Main Magnetic Force Computation Methods for Noise and Vibration Assessment in Electrical Machines. IEEE Trans. Magn. 2018, 54, 1–13. [Google Scholar] [CrossRef]
- Pyrhönen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines. In Design of Rotating Electrical Machines, 2nd ed.; John Wiley & Sons, Ltd.: Chichester, UK, 2014; Chapter 1; pp. 1–45. [Google Scholar]
- Meessen, K.J.; Paulides, J.J.H.; Lomonova, E.A. Force Calculations in 3-D Cylindrical Structures Using Fourier Analysis and the Maxwell Stress Tensor. IEEE Trans. Magn. 2013, 49, 536–545. [Google Scholar] [CrossRef]
- Shin, K.; Kim, K.; Hong, K.; Choi, J. Detent Force Minimization of Permanent Magnet Linear Synchronous Machines Using Subdomain Analytical Method Considering Auxiliary Teeth Configuration. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Arkkio, A. Analysis of Induction Motors based on the Numerical Solution of the Magnetic Field and Circuit Equations. Ph.D. Thesis, Helsinki University of Technology, Helsinki, Finland, 1987. [Google Scholar]
- Eriksson, S. Design of Permanent-Magnet Linear Generators with Constant-Torque-Angle Control for Wave Power. Energies 2019, 12, 1312. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Buried | Surface | |
|---|---|---|
| 0.45 | 1.2 | |
| 1.016 | 1.05 | |
| - | ||
| pole-pitch | 60 mm | 60 mm |
| 90 mm | 8.6 mm | |
| 30 mm | 40 mm | |
| Yoke | - | 25 mm |
| Translator iron | Silicon Steel NGO 50PN270 | |
| Parameter Values | |
|---|---|
| Slot depth | 81.875 mm |
| Slot face | 1.875 mm × 3.75 mm |
| Copper | 33% |
| Cable insulation (air) | 1 mm |
| Yoke | 24.8 mm |
| Stator iron | Silicon Steel NGO 50PN270 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sjölund, J.; Frost, A.E.; Leijon, M.; Eriksson, S. End Effects and Geometric Compensation in Linear Permanent Magnet Synchronous Generators with Different Topologies. Designs 2021, 5, 64. https://doi.org/10.3390/designs5040064
Sjölund J, Frost AE, Leijon M, Eriksson S. End Effects and Geometric Compensation in Linear Permanent Magnet Synchronous Generators with Different Topologies. Designs. 2021; 5(4):64. https://doi.org/10.3390/designs5040064
Chicago/Turabian StyleSjölund, Jonathan, Anna E. Frost, Mats Leijon, and Sandra Eriksson. 2021. "End Effects and Geometric Compensation in Linear Permanent Magnet Synchronous Generators with Different Topologies" Designs 5, no. 4: 64. https://doi.org/10.3390/designs5040064
APA StyleSjölund, J., Frost, A. E., Leijon, M., & Eriksson, S. (2021). End Effects and Geometric Compensation in Linear Permanent Magnet Synchronous Generators with Different Topologies. Designs, 5(4), 64. https://doi.org/10.3390/designs5040064