
Power-Hardware-in-the-Loop Simulation for Applied Science, a Review to Highlight Its Merits and Challenges


Abstract
1. Introduction
- A microgrid based on two inverters connected to an equivalent grid is used as a study case.
- Reflections from basic model conceptualization to be simulated offline are addressed.
- To aid in the process, considerations about the capability of the offline simulation to furnish the real-time simulation are argued.
- Insights on the relevant aspects of the implementation of the PHIL simulation are addressed and commented on.
- The advantages and drawbacks, as well as the lessons learned during the process, are discussed.
- The merits of PHIL simulation are explained by the results obtained using OPAL-RT-based microgrid experiments.
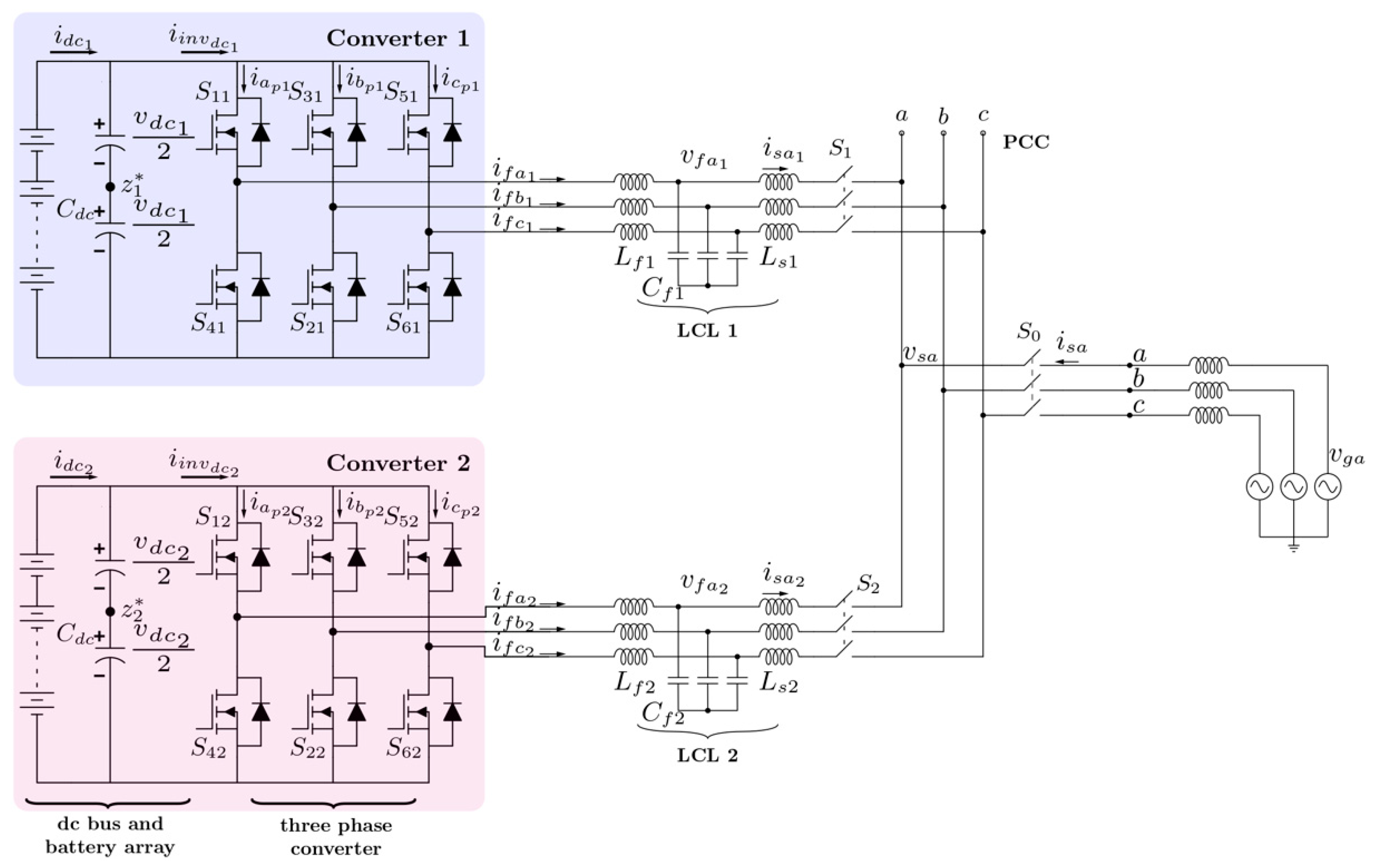
2. Selecting the Study Object
- Lf1 = 1.15 mH, Ls1 = 393 µH, Cf = 4.7 µF;
- Lf2 = 3.33 mH, Ls2 = 532.5 µH, Cf2 = 10 µF;
- vgx = 30 Vpeak with x = a, b, c;
- vdc = 120 V;
- fn = 50 Hz, grid frequency;
- mf = 41, frequency index modulation;
- fsw = 2050 Hz, switching frequency;
- Step time = 20 µs; integration step.
3. Stages of the Real-Time Simulation
3.1. Basic Concepts
- Select the study object: The plant and its constitutive parts should already be selected and parameterized.
- Electrical specification of the system: The purpose of the plant should be established, preferably with a clear scope of the functions and operation modes related to a known specification or recommendation. This will allow for the establishment of clear control objectives.
- Decide the modeling; does it work for your purposes? This part is the beginning of reaching a PHIL simulation; therefore, although it does not provide different information than offline simulations, it permits the recognition of the initial real-time simulation problems to be overcome.
Lessons Learned of the Basic Concepts
- To make the simulation in discrete time instead of continuous time.
- To decide the time step, select a reasonable step considering that, eventually, the simulation will evolve into a PHIL simulation.
- If the real-time platform has input/output channels, try channeling some signals to test the simulator communication.
- If the real-time simulator has display tools, adjust the precision of the signal deployment to determine whether the result is according to the theory, not only with visual tools but also numerical ones.
3.2. Evolving to Platform Models
Lessons Learned of Evolving to Platform Models
3.3. Preparing the Simulation for Hardware Interconnection
Lessons Learned in Preparing the Simulation
3.4. Power-Hardware-in-the-Loop Simulation (PHIL)
- To enhance this stage, the previous simulation steps were needed to tune the device regarding the interphase model, filters, and delays to improve this stage. Although it seems trivial, it is not; the power amplifier’s safety, the result’s quality, and the capability to disseminate reliable results are highly dependent on it. That is why it is highly recommended that the interconnection model be recorded in all the PHIL articles.
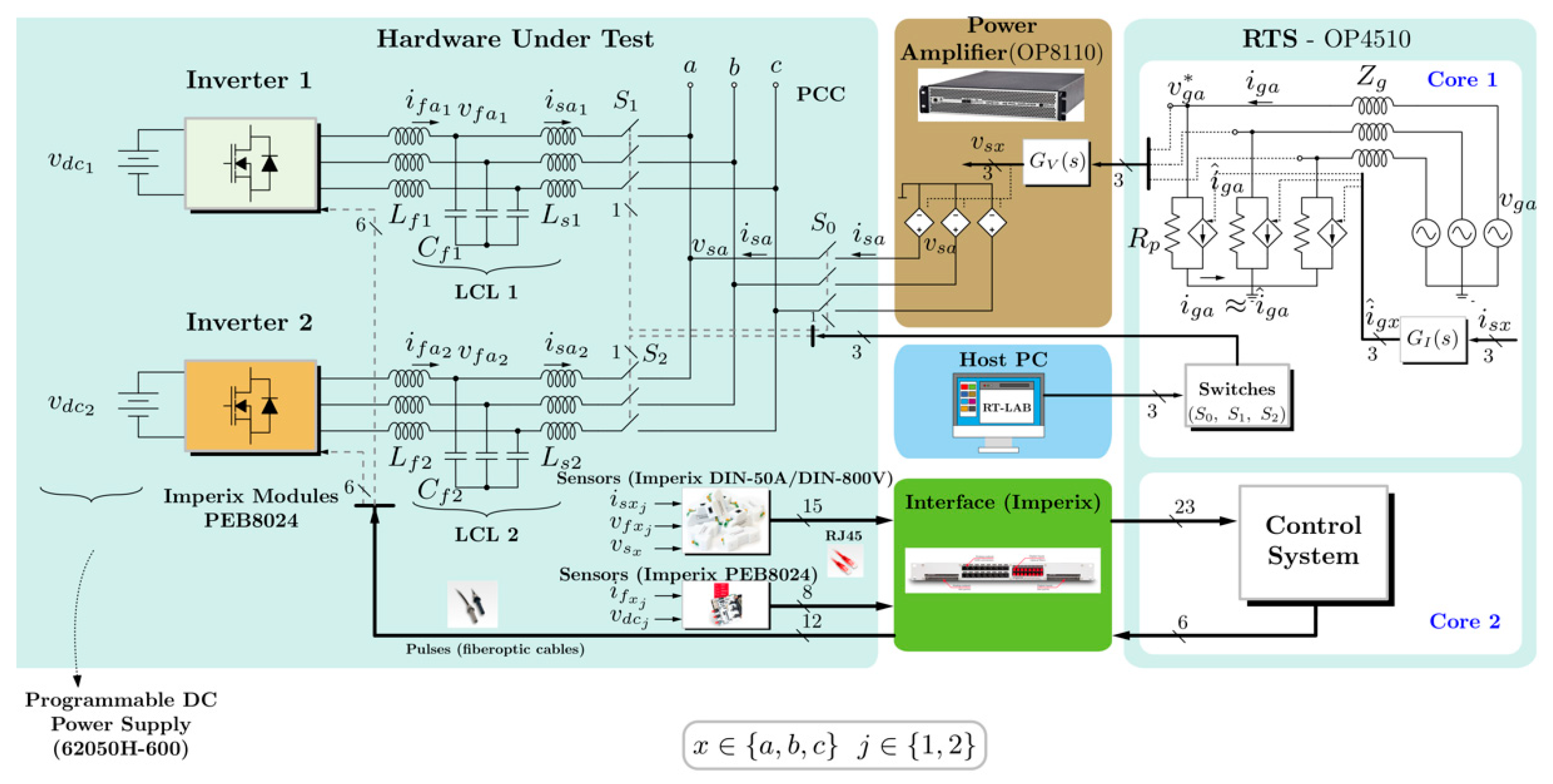
- Figure 7 shows multiple current and voltage sensors, and depending on the application, different sensed variables can interact with the simulation. Before any attempt at simulation, a meticulous sensor calibration process should be performed to ensure that the correct scaling has been used and the offsets have been eliminated to communicate the actual variables with the simulation.
- The power amplifier (OP8110 in this case) is the decisive device that empowers the PHIL simulation. From a practical standpoint, it permits bidirectional power flow between the HUT and the amplifier, considering any equivalent circuit model in the software. From the scientific viewpoint, the impact is much broader. Figure 7 shows a conceptualization of a microgrid with inverters that can operate in the grid forming or grid following mode for different purposes. Nevertheless, the simulation conceptualization can be of any other level of complexity. For instance, it can include the operation of protection devices, applications of distributed generation, virtual inertia converters, studies of controller schemes or hierarchical control of distributed energy resources, battery energy storage systems integrated into the facility, power systems analysis, smart-grid concepts, electric vehicles, communication protocols, and the developments of cyber-attack defense and a significant possibility of topics.
- The RTS-OP4510 device is the most elaborated expression of science, where researchers can develop their ideas, hypotheses, and experimentation to obtain high-quality results. Nevertheless, for this purpose, it is necessary to consider the following:
- The equivalent circuit interconnecting to the amplifier is programmed into the RTS-OP4510. Observe, from Figure 7 that the sensed currents are the inputs of the transfer function , where and is the bandwidth of the feedback filter. The output of the filter are the currents . As was said in the previous stage, the filter polynomial order and cut-off frequency are critical for the simulation stability and, consequently, for the amplifier safety.
- Also, Figure 7 shows that at the point of common coupling with the power amplifier, another transfer function , Trts = 20 μs, is the time step of the real-time simulation. Selecting this time step depends on the computational capability. Of course, having a reduced time step is convenient, but then overruns are more likely. Therefore, the programmer should be efficient in their programming process. Therefore, the efficacy of the simulation is a parameter to be considered. An intrinsic delay of the power amplifier OP8110 is TOP8110 = 8 μs.
- A great versatility is that users can leverage the cores of the RTS-OP4510 to organize resources better. In this case, the control system, where the control law is calculated, is hosted in a different core for better processing. The PWM switches control signals are interfaced through the inverters by an IMPERIX interface, as seen in Figure 7.
- There are several possibilities to calibrate and minimize the measurement errors of each sensor. As a suggestion, the user can program an FFT algorithm to decouple the DC from the AC part of the signals. Take a known signal from a controlled source and pass it across the sensor. In this way, the user can calibrate the offset and scale with the correct gains to ensure the proper value of the signals.
Lessons Learned of Power-Hardware-in-the-Loop Simulation
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Ulerio, R.O.S.; Nowocin, J.K.; Smith, C.L.; Rekha, R.P.; Corbett, E.G.; Limpaecher, E.R.; LaPenta, J.M. Development of a Real-Time Hardware-in-the-Loop Power Systems Simulation Platform to Evaluate Commercial Microgrid Controllers. Technical Report. Available online: https://www.ll.mit.edu/sites/default/files/publication/doc/development-real-time-hardware-in-the-loop-power-systems-salcedo-ulerio-tr-1203.pdf (accessed on 4 November 2024).
- García-Martínez, E.; Sanz, J.F.; Muñoz-Cruzado, J.; Perié, J.M. A Review of PHIL Testing for Smart Grids—Selection Guide, Classification and Online Database Analysis. Electronics 2020, 9, 382. [Google Scholar] [CrossRef]
- Rathnayake, D.B.; Akrami, M.; Phurailatpam, C.; Me, S.P.; Hadavi, S.; Jayasinghe, G.; Zabihi, S.; Bahrani, B. Grid Forming Inverter Modeling, Control, and Applications. IEEE Access 2021, 9, 114781–114807. [Google Scholar] [CrossRef]
- Kotsampopoulos, P.; Georgilakis, P.; Lagos, D.T.; Kleftakis, V.; Hatziargyriou, N. FACTS Providing Grid Services: Applications and Testing. Energies 2019, 12, 2554. [Google Scholar] [CrossRef]
- Simões, M.G.; Ribeiro, P.F. Education in Electrification for Societal Sustainability: History and philosophy. IEEE Electrific. Mag. 2024, 12, 89–99. [Google Scholar] [CrossRef]
- Simões, M.G. The Evolution of Electrification—From a Non-Plan Toward an Engineering Achievement—Early Years [History]. IEEE Electrific. Mag. 2024, 12, 92–96. [Google Scholar] [CrossRef]
- Ghosh, A.; Zare, F. Control of Power Electronic Converters with Microgrid Applications; Wiley: Hoboken, NJ, USA, 2023; ISBN 978-1-119-81546-4. [Google Scholar]
- Ismail, M.A.; Alfouly, A.; Hussein, H.S.; Hamdan, I. Hardware in the Loop Real-Time Simulation of Improving Hosting Capacity in Photovoltaic Systems Distribution Grid With Passive Filtering Using OPAL-RT. IEEE Access 2023, 11, 78119–78134. [Google Scholar] [CrossRef]
- Sidorov, V.; Chub, A.; Vinnikov, D.; Lindvest, A. Novel Universal Power Electronic Interface for Integration of PV Modules and Battery Energy Storages in Residential DC Microgrids. IEEE Access 2023, 11, 30845–30858. [Google Scholar] [CrossRef]
- Jain, R.; Sawant, J.R.; Pratt, A. A Power-Hardware-in-the-Loop (PHIL) Evaluation of Service Restoration With Networked Microgrids. In Proceedings of the 2024 IEEE Power & Energy Society General Meeting (PESGM), Seattle, WA, USA, 21–25 July 2024. [Google Scholar] [CrossRef]
- Kikusato, H.; Ustun, T.S.; Suzuki, M.; Sugahara, S.; Hashimoto, J.; Otani, K.; Shirakawa, K.; Yabuki, R.; Watanabe, K.; Shimizu, T. Microgrid Controller Testing Using Power Hardware-in-the-Loop. Energies 2020, 13, 2044. [Google Scholar] [CrossRef]
- Alzate-Drada, S.; Montano-Martinez, K.; Andrade, F. Energy Management System for a Residential Microgrid in a Power Hardware-in-the-Loop Platform. In Proceedings of the 2019 IEEE Power & Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Ceceña, A.A. Power Hardware-in-the-Loop Interfacing of Grid-Forming Inverter for Microgrid Islanding Studies. In Proceedings of the 2023 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 16–19 January 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Pratt, A.; Prabakar, K.; Ganguly, S.; Tiwari, S. Power-Hardware-in-the-Loop Interfaces for Inverter-Based Microgrid Experiments Including Transitions. In Proceedings of the 2023 IEEE Energy Conversion Congress and Exposition (ECCE), Nashville, TN, USA, 29 October–2 November 2023; pp. 537–544. [Google Scholar] [CrossRef]
- Ren, W. Accuracy Evalaution of Power Hardware-in-the-Loop (PHIL) Simulation. Available online: https://www.proquest.com/openview/effd1ea0813a34dde56f0030feff5221/1?pq-origsite=gscholar&cbl=18750 (accessed on 24 October 2024).
- Kothandaraman, S.R.; Malekpour, A.; Maigha, M.; Paaso, A.; Zamani, A.; Katiraei, A. Utility Scale Microgrid Controller Power Hardware-in-the-Loop Testing. In Proceedings of the IEEE Electronic Power Grid (eGrid), Charleston, SC, USA, 12–14 November 2018; IEEE: Piscataway, NJ, USA; pp. 1–6. [Google Scholar] [CrossRef]
- Samano-Ortega, V.; Rodriguez-Estrada, H.; Rodríguez-Segura, E.; Padilla-Medina, J.; Aguilera-Alvarez, J.; Martinez-Nolasco, J. Power Sharing Control in a Grid-Tied DC Microgrid: Controller Hardware in the Loop Validation. Appl. Sci. 2021, 11, 9295. [Google Scholar] [CrossRef]
- Vodyakho, O.; Edrington, C.S.; Steurer, M.; Azongha, S.; Fleming, F. Synchronization of three-phase converters and virtual microgrid implementation utilizing the Power-Hardware-in-the-Loop concept. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 216–222. [Google Scholar] [CrossRef]
- Nasab, M.R.; Cometa, R.; Bruno, S.; Giannoccaro, G.; Scala, M.L. Power Systems Simulation and Analysis: A Review on Current Applications and Future Trends in DRTS of Grid-Connected Technologies. IEEE Access 2024, 12, 121320–121345. [Google Scholar] [CrossRef]
- Dow, A.R.R.; Darbali-Zamora, R.; Flicker, J.D.; Palacios, F.; Csank, J.T. Development of Hierarchical Control for a Lunar Habitat DC Microgrid Model Using Power Hardware-in-the-Loop. In Proceedings of the 2022 IEEE 49th Photovoltaics Specialists Conference (PVSC), Philadelphia, PA, USA, 5–10 June 2022; pp. 0754–0760. [Google Scholar] [CrossRef]
- Colet-Subirachs, A.; Paradell, P.; Vasquez, J.L.; Dominguez-Garcia, J.L.; Pampliega, D.; Ramos, F.; Gallart-Fernandez, R. Cyberattack Mitigation in a Microgrid Environment: A Power-Hardware-in-The-Loop testing methodology. In Proceedings of the 2022 IEEE International Conference on Environment and Electrical Engineering and 2022 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Prague, Czech Republic, 28 June 2022–1 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Kasper, L.; Schwarzmayr, P.; Birkelbach, F.; Javernik, F.; Schwaiger, M.; Hofmann, R. A digital twin-based adaptive optimization approach applied to waste heat recovery in green steel production: Development and experimental investigation. Appl. Energy 2024, 353, 122192. [Google Scholar] [CrossRef]
- Glass, P.; Di Marzo Serugendo, G. Coordination Model and Digital Twins for Managing Energy Consumption and Production in a Smart Grid. Energies 2023, 16, 7629. [Google Scholar] [CrossRef]
- Shitole, A.B.; Kandasamy, N.K.; Liew, L.S.; Sim, L.; Bui, A.K. Real-Time Digital Twin of Residential Energy Storage System for Cyber-Security Study. In Proceedings of the 2021 IEEE 2nd International Conference on Smart Technologies for Power, Energy and Control (STPEC), Bilaspur, Chhattisgarh, India, 19–22 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Testasecca, T.; Lazzaro, M.; Sirchia, A. Towards Digital Twins of buildings and smart energy networks: Current and future trends. In Proceedings of the 2023 IEEE International Workshop on Metrology for Living Environment (MetroLivEnv), Milano, Italy, 29–31 May 2023; pp. 96–101. [Google Scholar] [CrossRef]
- Sayed-Mouchaweh, M. (Ed.) Artificial Intelligence Techniques for a Scalable Energy Transition: Advanced Methods, Digital Technologies, Decision Support Tools, and Applications; Springer International Publishing: Cham, Switzerland, 2020; ISBN 978-3-030-42725-2. [Google Scholar] [CrossRef]
- Szcześniak, P.; Grobelna, I.; Novak, M.; Nyman, U. Overview of Control Algorithm Verification Methods in Power Electronics Systems. Energies 2021, 14, 4360. [Google Scholar] [CrossRef]
- Hoang, T.T.; Nair, N.-K.C. Advanced Approach for Stability Assessment of PHIL Setups Coupled by Clarke-Park Transform. In Proceedings of the 2023 IEEE Power & Energy Society General Meeting (PESGM), Orlando, FL, USA, 16–20 July 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Lundstrom, B.; Salapaka, M.V. Optimal Power Hardware-in-the-Loop Interfacing: Applying Modern Control for Design and Verification of High-Accuracy Interfaces. IEEE Trans. Ind. Electron. 2021, 68, 10388–10399. [Google Scholar] [CrossRef]
- Upamanyu, K.; Narayanan, G. Improved Accuracy, Modeling, and Stability Analysis of Power-Hardware-in-Loop Simulation With Open-Loop Inverter as Power Amplifier. IEEE Trans. Ind. Electron. 2020, 67, 369–378. [Google Scholar] [CrossRef]
- Constantine, J.; Lian, K.L.; Yang, N.-T. A New Interface for Power Hardware-in-the-Loop Simulation Using Nelder–Mead Algorithm Une nouvelle interface pour la simulation Hardware-in-the-Loop de puissance à l’aide de l’algorithme de Nelder-Mead. IEEE Can. J. Electr. Comput. Eng. 2025, 48, 10–18. [Google Scholar] [CrossRef]
- Ruiz, Y.L.; Ramirez, J.S.; Nuñez, C.; Visairo, N. Preliminary Power Hardware in the Loop Simulation of a Microgrid Test Bench in OPAL-RT. In Proceedings of the CONCAPAN XLII, San José, Costa Rica, 27–29 November 2024. [Google Scholar]
- Ojaghloo, B.; Gharehpetian, G.B. Power Hardware In The Loop Realization, Control and Simulation. Renew. Energy Power Qual. J. 2017, 1, 108–113. [Google Scholar] [CrossRef]
- Tozak, M.; Taskin, S.; Sengor, I.; Hayes, B.P. Modeling and Control of Grid Forming Converters: A Systematic Review. IEEE Access 2024, 12, 107818–107843. [Google Scholar] [CrossRef]
- Hatakeyama, T.; Riccobono, A.; Monti, A. Stability and accuracy analysis of power hardware in the loop system with different interface algorithms. In Proceedings of the 2016 IEEE 17th Workshop on Control and Modeling for Power Electronics (COMPEL), Trondheim, Norway, 27–30 June 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Lauss, G.; Strunz, K. Accurate and Stable Hardware-in-the-Loop (HIL) Real-Time Simulation of Integrated Power Electronics and Power Systems. IEEE Trans. Power Electron. 2021, 36, 10920–10932. [Google Scholar] [CrossRef]
- Bigarelli, L.; di Benedetto, M.; Lidozzi, A.; Solero, L. Stability and Accuracy Evaluation of LCL Coupling Networks for PMSM Emulation PHIL. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 9–13 October 2022; IEEE: Piscataway, NJ, USA; pp. 1–7. [Google Scholar] [CrossRef]
- Ayasun, S.; Fischl, R.; Vallieu, S.; Braun, J.; Çadırlı, D. Modeling and stability analysis of a simulation–stimulation interface for hardware-in-the-loop applications. Simul. Model. Pract. Theory 2007, 15, 734–746. [Google Scholar] [CrossRef]
- Rimorov, D.; Forbes, J.R.; Tremblay, O.; Gagnon, R. Robust Impedance Emulation for Transmission Line Interface in Power-Hardware-In-the-Loop Applications: Optimal Filter Approach. IEEE Open J. Ind. Electron. Soc. 2025, 6, 158–169. [Google Scholar] [CrossRef]
- Hernandez-Alvidrez, J.; Darbali-Zamora, R.; Flicker, J.D.; Gurule, N.S. Testing Functional Capabilities of Commercial Grid Forming Inverters Using a Power Hardware-in-the-Loop Setup. In Proceedings of the 2024 IEEE 52nd Photovoltaic Specialist Conference (PVSC), Seattle, WA, USA, 9–14 June 2024; pp. 0759–0765. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Merits |
|---|
|
| Drawbacks |
|
| Merits |
|---|
|
| Drawbacks |
|
| Merits |
|---|
|
| Drawbacks |
|
| Merits |
|---|
|
| Drawbacks |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Núñez-Gutiérrez, C. Power-Hardware-in-the-Loop Simulation for Applied Science, a Review to Highlight Its Merits and Challenges. Inventions 2025, 10, 19. https://doi.org/10.3390/inventions10010019
Núñez-Gutiérrez C. Power-Hardware-in-the-Loop Simulation for Applied Science, a Review to Highlight Its Merits and Challenges. Inventions. 2025; 10(1):19. https://doi.org/10.3390/inventions10010019
Chicago/Turabian StyleNúñez-Gutiérrez, Ciro. 2025. "Power-Hardware-in-the-Loop Simulation for Applied Science, a Review to Highlight Its Merits and Challenges" Inventions 10, no. 1: 19. https://doi.org/10.3390/inventions10010019
APA StyleNúñez-Gutiérrez, C. (2025). Power-Hardware-in-the-Loop Simulation for Applied Science, a Review to Highlight Its Merits and Challenges. Inventions, 10(1), 19. https://doi.org/10.3390/inventions10010019