
Smart Shipboard Power System Operation and Management




Abstract
:
1. Introduction
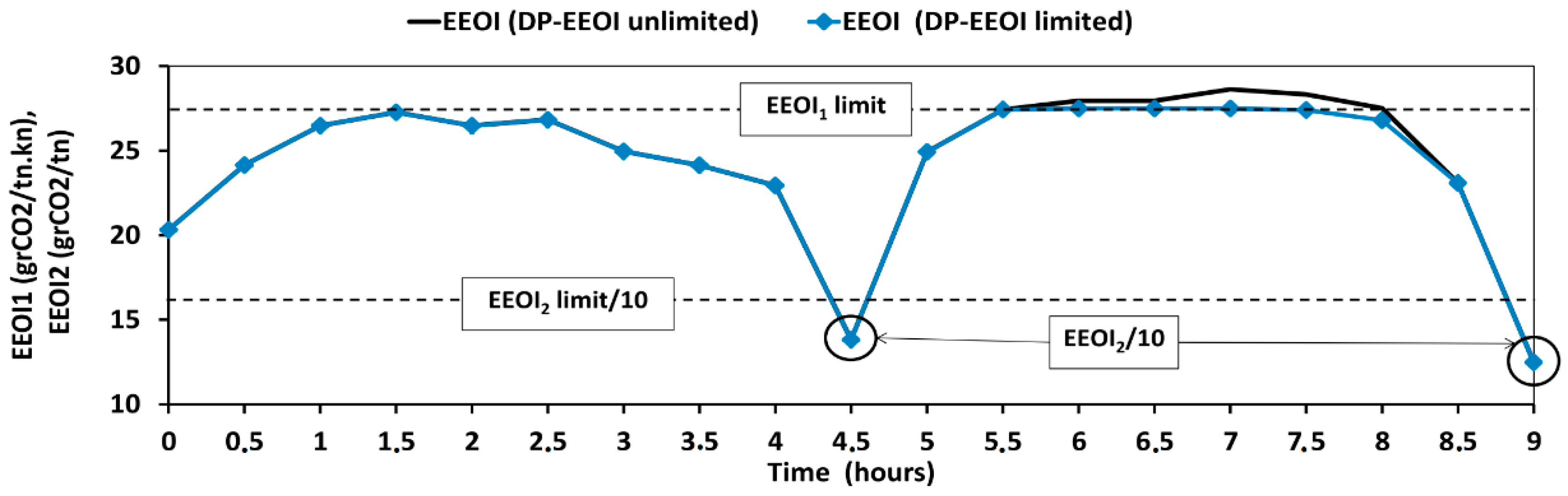
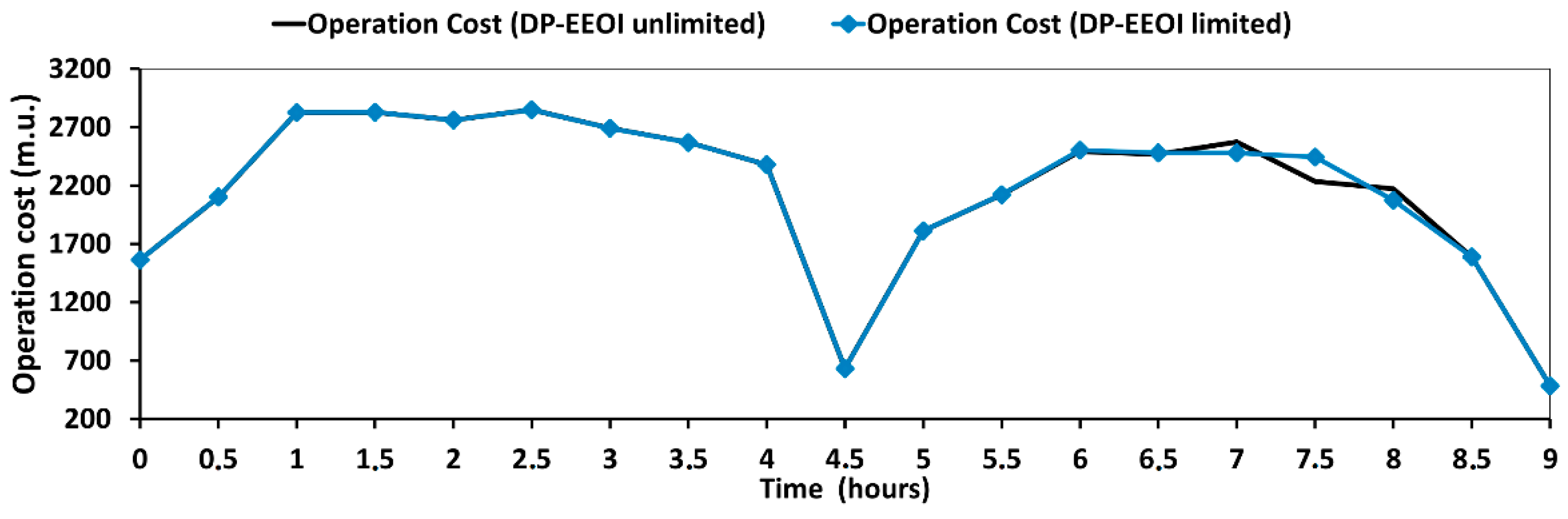
- Shipboard PMS is designed not only to ensure economic operation of the vessel under any working condition, but also to meet the pollutants emission constraints according to the available standards. It is noted that energy efficiency indices adopted by IMO do not include NOx and SOx and are focused on CO2 emissions.
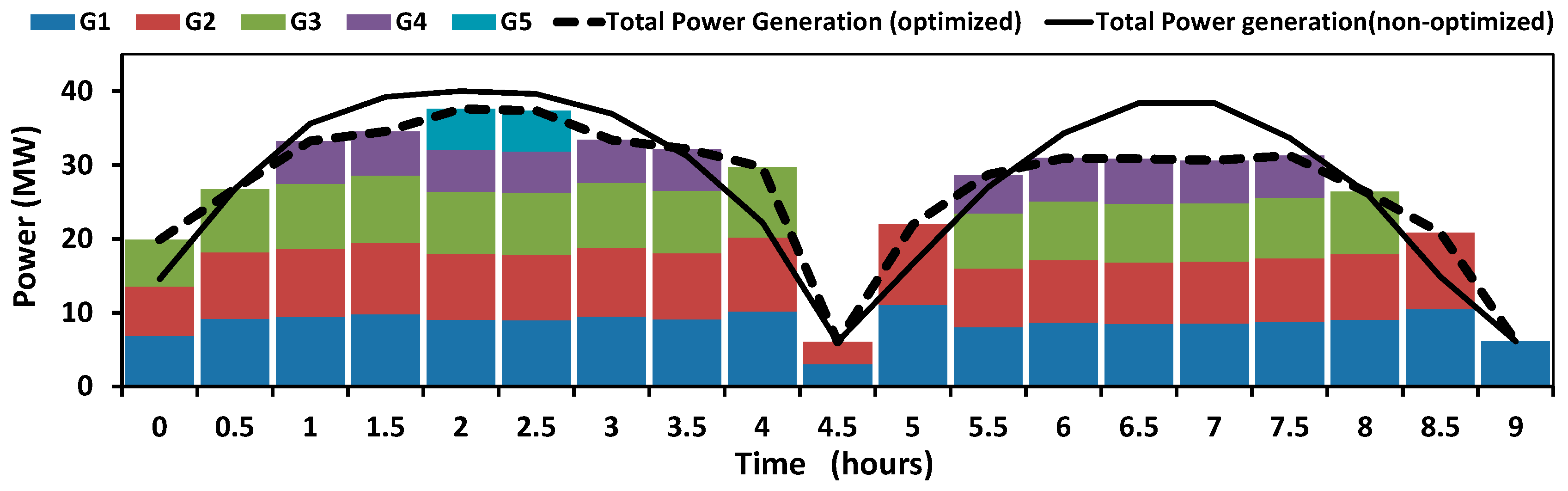
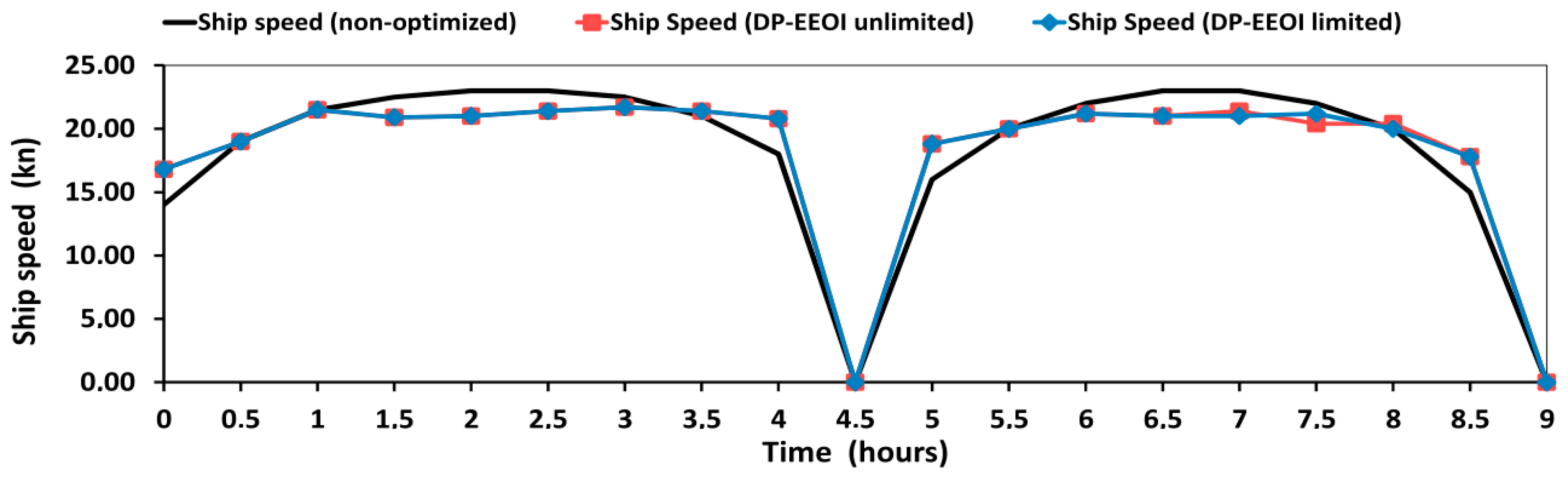
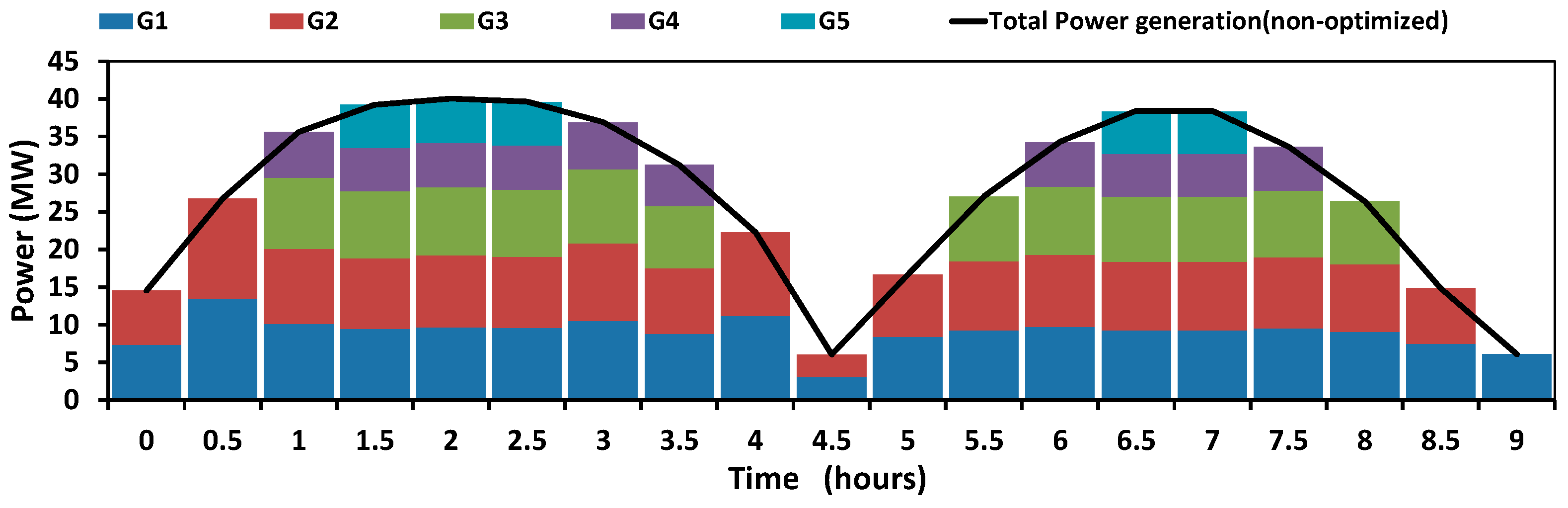
- Power scheduling within the AES is considered simultaneously at the supply and demand sides and their system-level interaction is modeled accordingly, i.e., the propulsion load at the demand side is appropriately adjusted so that the optimal points of operation of the electric generators at the supply side are approached.
2. Materials and Methods
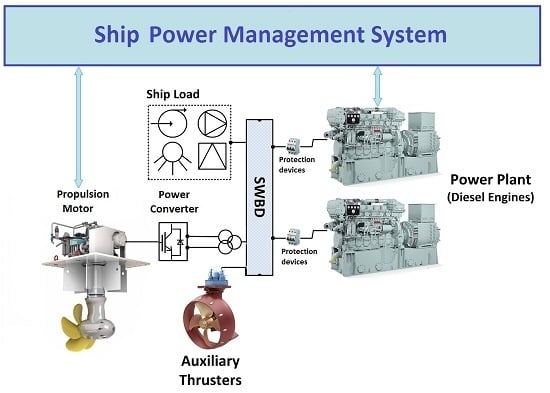
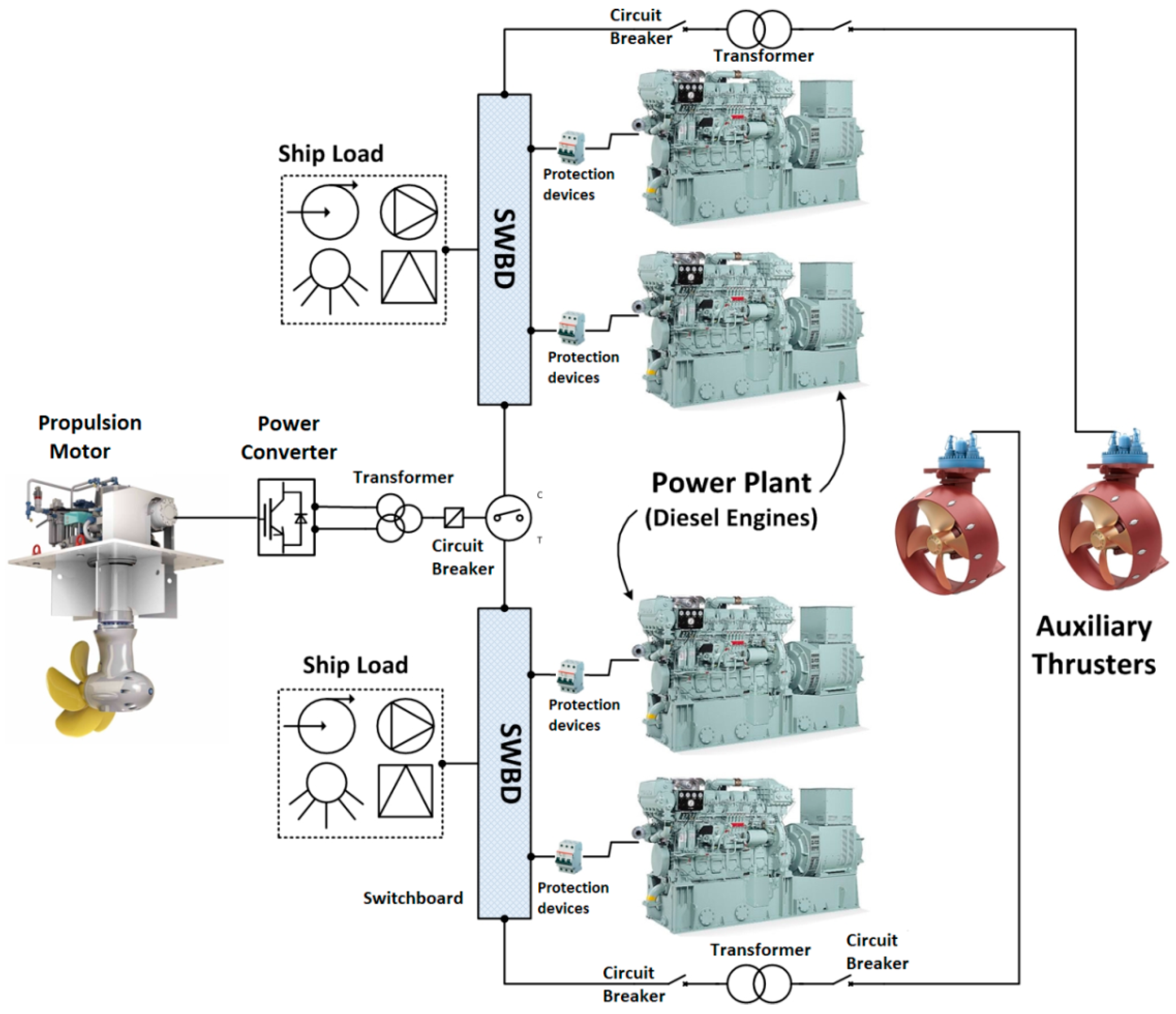
2.1. Ship Power System Economic and Environment-Friendly Operation Modeling
2.2. Formulation of Shipboard Power Management with Environmental Constraints
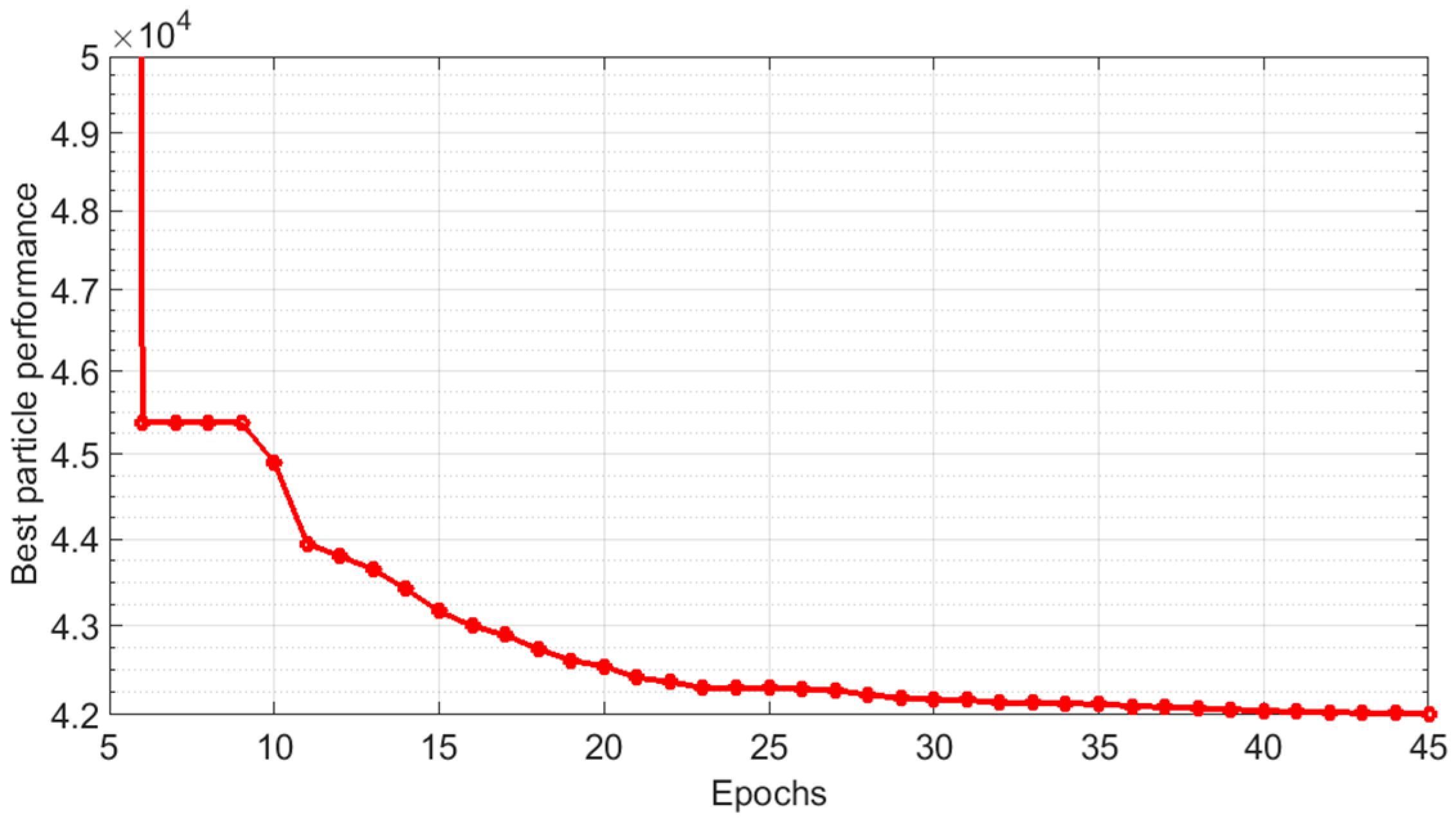
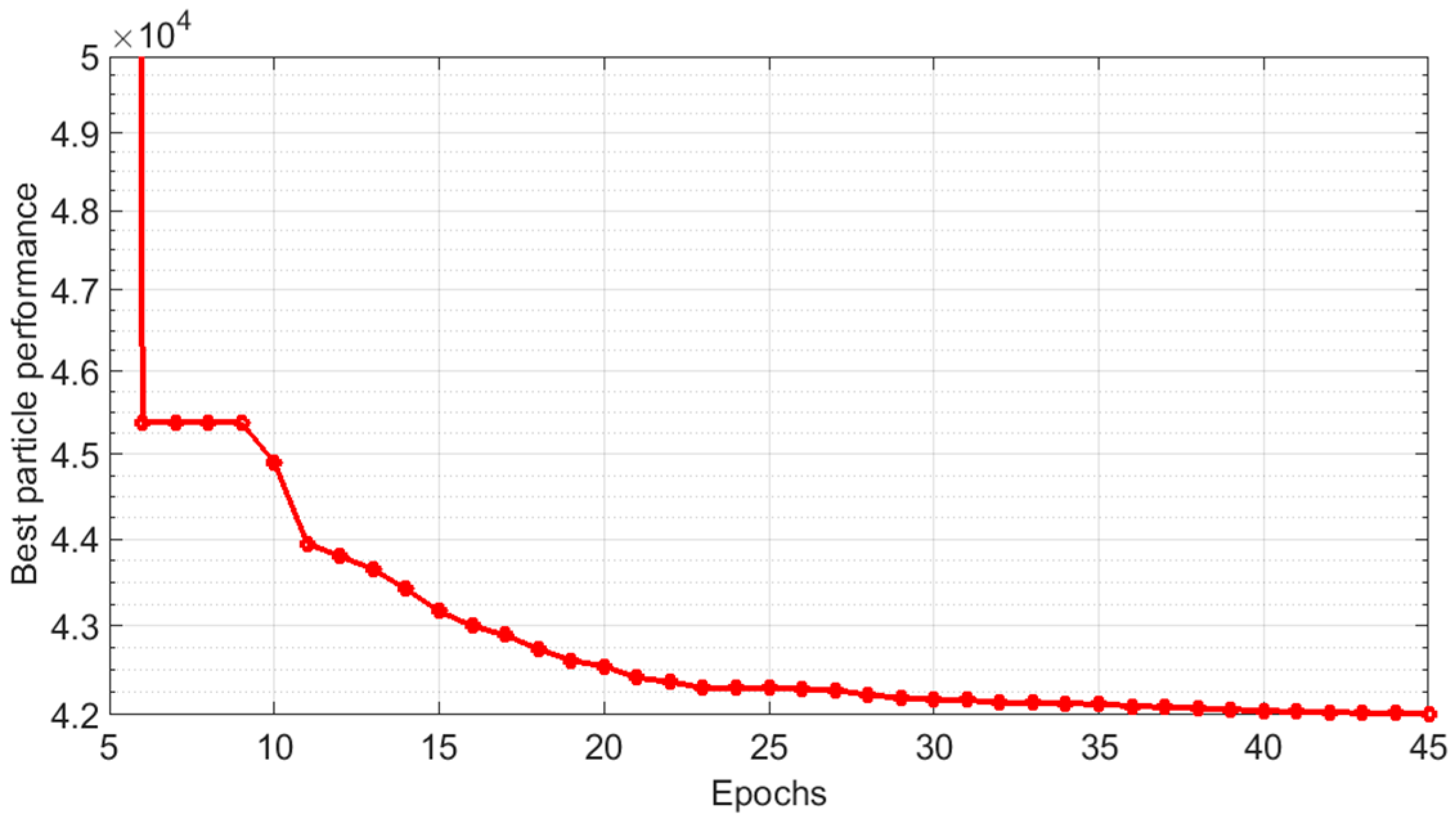
2.3. Solution with Particle Swarm Optimization
(1). Initialization of particles’ positions (2). Evaluation of each particle (3). Penalty application Epoch = 0; While {termination criteria} Estimation of new positions; Epoch = Epoch + 1; Evaluation of each particle; Penalty application; Save Global best; Save personal bests; End Evaluation of the best particle
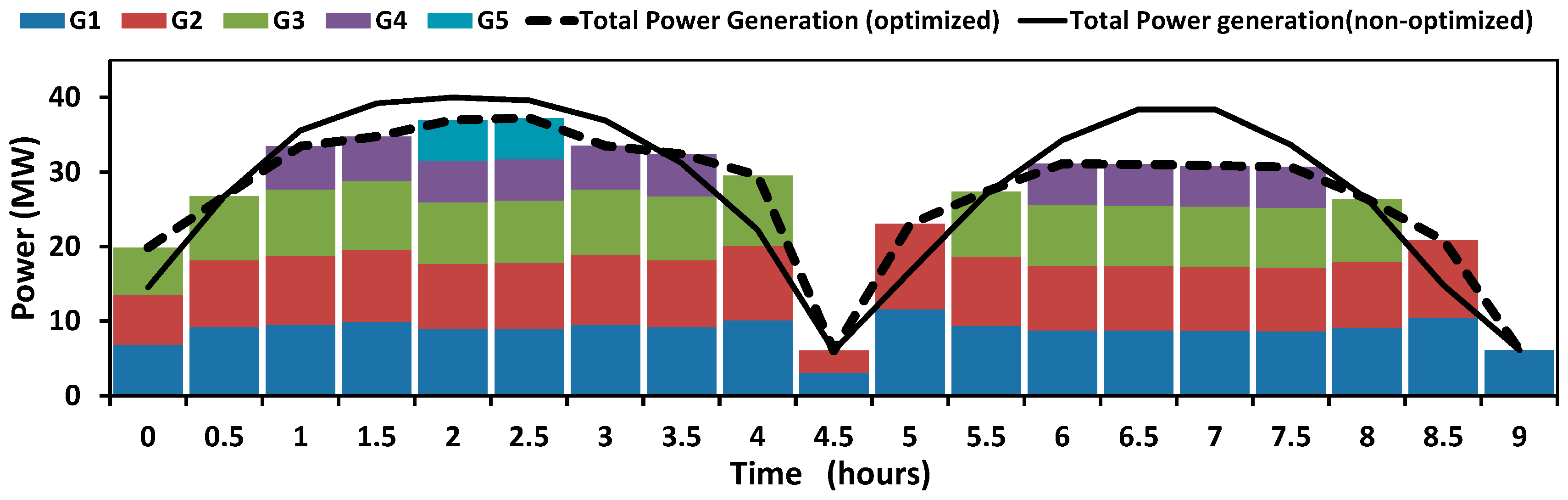
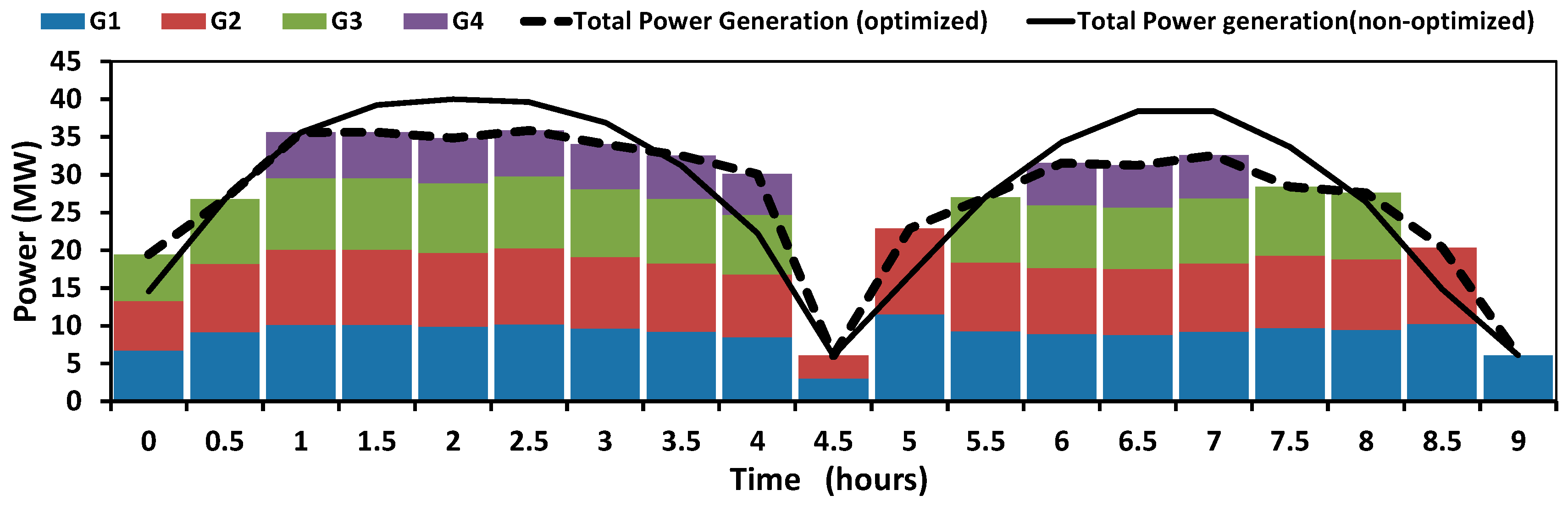
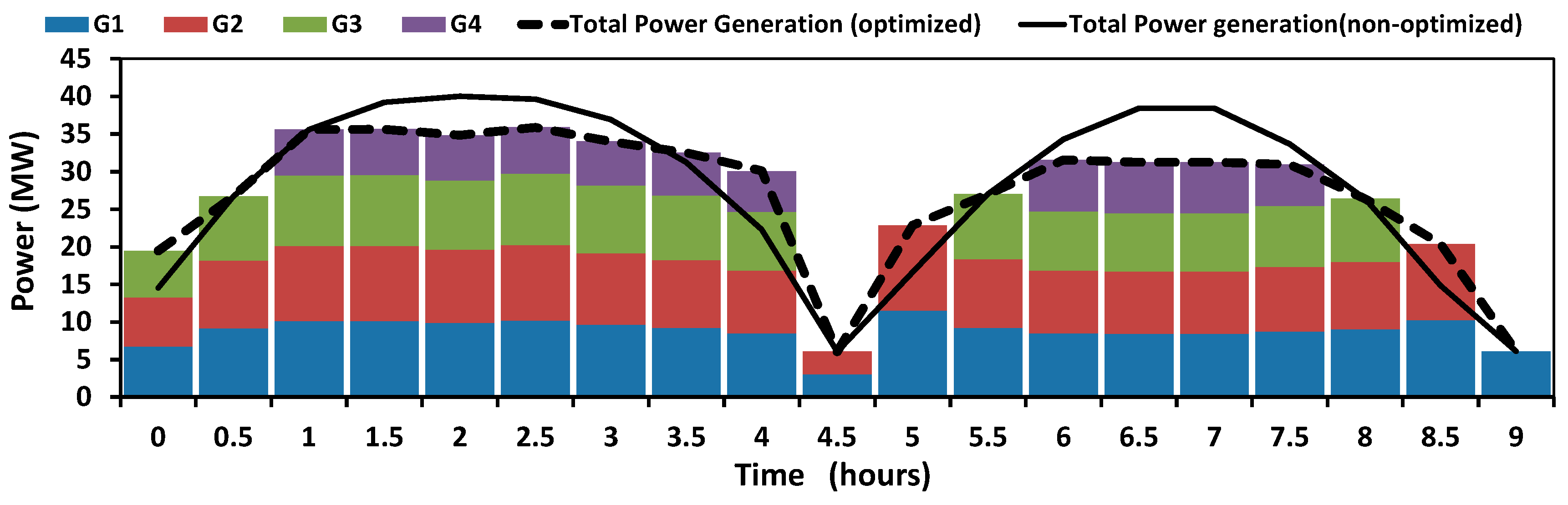
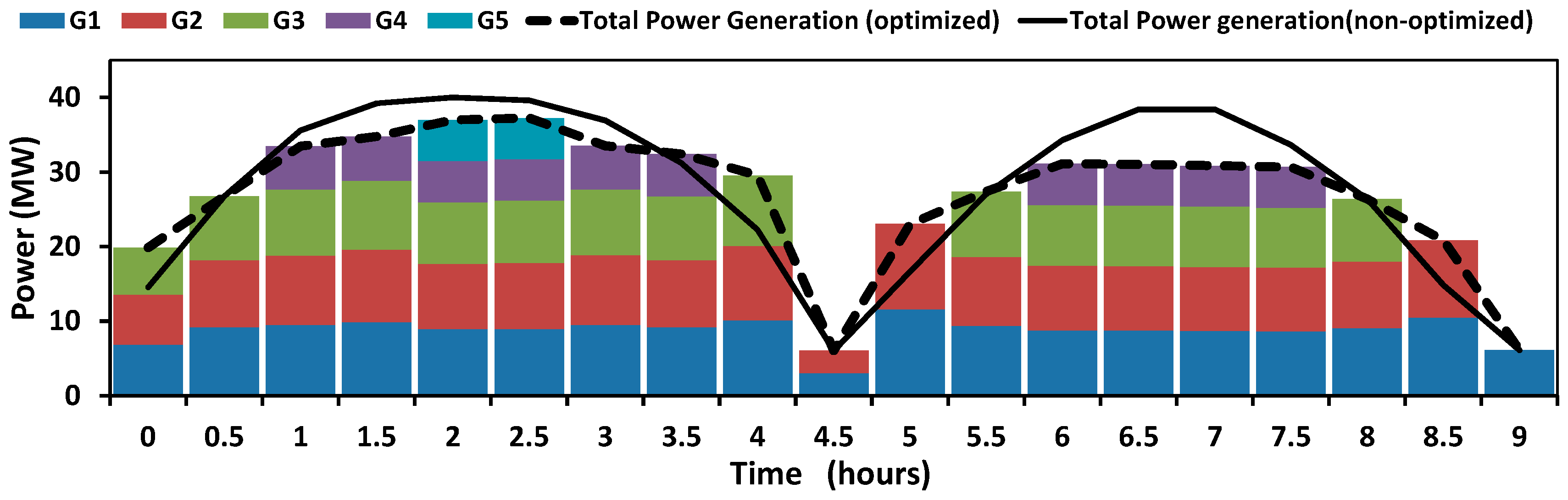
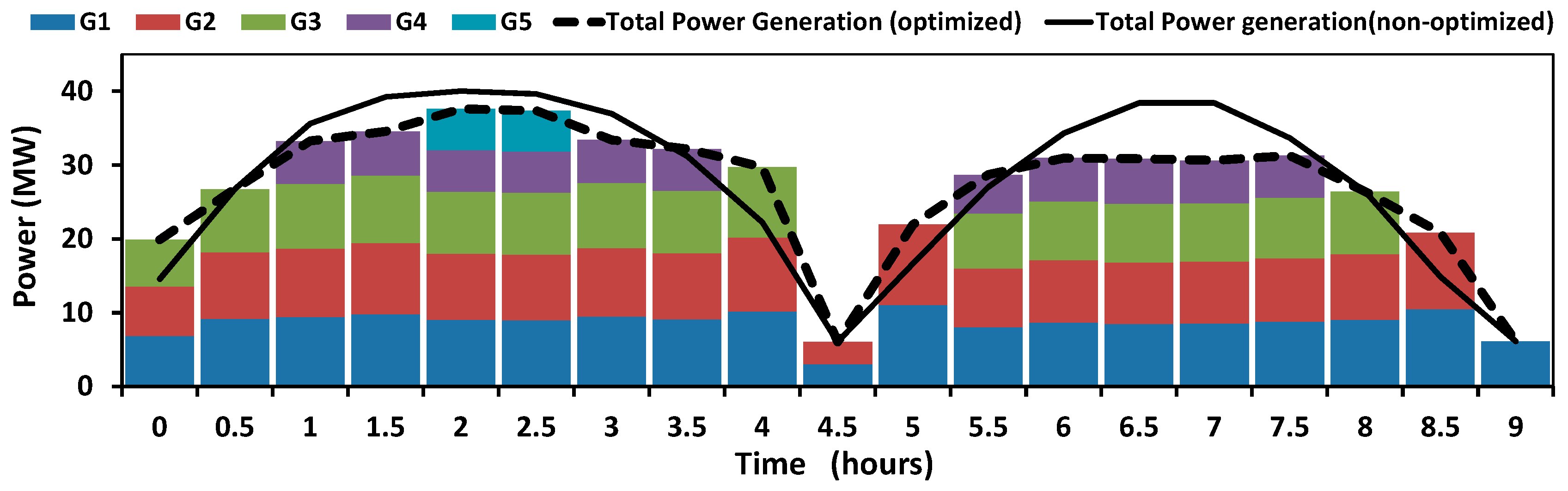
3. Results
Case Study
4. Discussion
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Seenumani, G.; Sun, J.; Peng, H. Real-time power management of integrated power systems in all electric ships leveraging multi time scale property. IEEE Trans. Control Syst. Technol. 2012, 20, 232–240. [Google Scholar] [CrossRef]
- Sudhoff, S.D. Currents of change. IEEE Power Energy Mag. 2011, 1, 30–37. [Google Scholar] [CrossRef]
- Gertsos, S.A.; Prousalidis, J.M.; Frangopoulos, C.A. Electric propulsion: From infancy to adolescence. In Proceedings of the 8th International Marine Design Conference (IMDC), Athens, Greece, 5–8 May 2003.
- McCoy, T.J.; Amy, J.V. The state-of-the-art of integrated electric power and propulsion systems and technologies on ships. In Proceedings of the IEEE Electric Ship Technologies Symposium (ESTS), Baltimore, MD, USA, 20–22 April 2009.
- McCoy, T.J. Trends in ship electric propulsion. In Proceedings of the IEEE Power Engineering Society Meeting, Chicago, IL, USA, 21–25 July 2002; pp. 343–346.
- Faruque, M.O.; Dinavahi, V.; Sioderbeck, M.; Steurer, M. Geographically distributed thermo-electric co-simulation of all-electric ship. In Proceedings of the IEEE Electric Ship Technologies Symposium (ESTS), Baltimore, MD, USA, 20–22 April 2009; pp. 36–43.
- Prousalidis, J.M.; Tsekouras, G.J.; Kanellos, F. New challenges emerged from the development of more efficient electric energy generation units. In Proceedings of the IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 10–13 April 2011; pp. 374–381.
- Tsekouras, G.J.; Kanellos, F.D. Optimal operation of ship electrical power system with energy storage system and photovoltaics: Analysis and application. WSEAS Trans. Power Syst. 2013, 8, 145–155. [Google Scholar]
- Wu, W.; Wang, D.; Arapostathis, A.; Davey, K. Optimal Power Generation Scheduling of a Shipboard Power System. In Proceedings of the IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 21–23 May 2007; pp. 519–522.
- Park, H.; Sun, J.; Pekarek, S.; Stone, P.; Opila, D.; Meyer, R.; Kolmanovsky, I.; DeCarlo, R. Real-time model predictive control for shipboard power management using the IPA-SQP approach. IEEE Trans. Control Syst. Technol. 2015, 23, 2129–2143. [Google Scholar] [CrossRef]
- Banaei, M.R.; Alizadeh, R. Simulation-based modeling and power management of all-electric ships based on renewable energy generation using model predictive control strategy. IEEE Intell. Transp. Syst. Mag. 2016, 8, 90–103. [Google Scholar] [CrossRef]
- Rapeti1, A.; Rao, A.A. Optimization and simulation of electric ship with low voltage AC/DC hybrid power system. Int. J. Sci. Res. 2014, 3, 2159–2166. [Google Scholar]
- Mashayekh, S.; Butler-Purry, K.L. An Integrated security-constrained model-based dynamic power management approach for isolated microgrids in All-Electric Ships. IEEE Trans. Power Syst. 2015, 30, 2934–2945. [Google Scholar] [CrossRef]
- Tafanidis, K.K.; Taxeidis, K.D.; Tsekouras, G.J.; Kanellos, F.D. Optimal operation of war-ship electric power system equipped with energy storage system. J. Comput. Model. 2013, 3, 41–60. [Google Scholar]
- Kanellos, F.D. Optimal power management with GHG emissions limitation in All-Electric Ship power systems comprising energy storage systems. IEEE Trans. Power Syst. 2014, 29, 330–339. [Google Scholar] [CrossRef]
- Anvari-Moghaddam, A.; Dragicevic, T.; Meng, L.; Sun, B.; Guerrero, J.M. Optimal planning and operation management of a ship electrical power system with energy storage system. In Proceedings of the 42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016.
- Zahedi, B.; Norum, L.E.; Ludvigsen, K.B. Optimized efficiency of All-Electric Ships by DC hybrid power systems. J. Power Sources 2014, 255, 341–354. [Google Scholar] [CrossRef]
- Kanellos, F.D.; Prousalidis, J.M.; Skouras, G.J. Control system for fuel consumption minimization–gas emission limitation of full electric propulsion ship power systems. J. Eng. Marit. Environ. 2014, 228, 17–28. [Google Scholar] [CrossRef]
- Kanellos, F.D.; Tsekouras, G.J.; Hatziargyriou, N.D. Optimal demand side management and power generation scheduling in All Electric Ship. IEEE Trans. Sustain. Energy 2014, 5, 1166–1175. [Google Scholar] [CrossRef]
- Feng, X.; Butler-Purry, K.L.; Zourntos, T. Multi-agent system-based real-time load management for all-electric ship power systems in DC zone level. IEEE Trans. Power Syst. 2012, 27, 1719–1728. [Google Scholar] [CrossRef]
- Tang, D.; Yan, X.; Yuan, Y.; Wang, K.; Qiu, L. Multi-agent Based Power and Energy Management System for Hybrid Ships. In Proceedings of the International Conference Renewable Energy Research and Application (ICRERA), Palermo, Italy, 22–25 November 2015; pp. 383–387.
- Feng, X.; Butler-Purry, K.L.; Zourntos, T. A Multi-agent system framework for real-time electric load management in MVAC All-Electric ship power systems. IEEE Trans. Power Syst. 2015, 30, 1327–1336. [Google Scholar] [CrossRef]
- Seenumani, G.; Sun, J.; Peng, H. A hierarchical optimal control strategy for power management of hybrid power systems in all electric ships applications. In Proceedings of the 49th IEEE Conference Decision & Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 3972–3977.
- Larsson, L.; Raven, H.C. The Principles of Naval Architecture Series: Ship Resistance and Flow; Society of Naval Architects and Marine Engineers: Jersey City, NJ, USA, 2010. [Google Scholar]
- Woud, H.K.; Stapersma, D. Design of Propulsion and Electric Power Generation Systems; Institute of Marine Engineers: Bellevue, WA, USA, 2002. [Google Scholar]
- International Maritime Organization (IMO). Prevention of Air Pollution from Ships; MARPOL 73/78 Annex VI; Technical Report; IMO: London, UK, 2004. [Google Scholar]
- International Maritime Organization (IMO). RESOLUTION MEPC.213(63): 2012 Guidelines for the Development of a Ship Energy Efficiency Management Plan (SEEMP). 2012. Available online: http://www.imo.org/OurWork/Environment/PollutionPrevention/AirPollution/Documents/Technical%20and%20Operational%20Measures/MEPC.213%2863%29.pdf (accessed on 1 August 2016).
- International Maritime Organization (IMO). MEPC.1/Circ.684: Guidelines for Voluntary Use of the Ship Energy Efficiency Operational Indicator. 2009. Available online: http://www.imo.org/blast/blastDataHelper.asp?data_id=26531&filename=684.pdf (accessed on 1 August 2016).
- Anvari-Moghaddam, A.; Seifi, A.R.; Niknam, T. Multi-operation management of a typical microgrid using particle swarm optimization: A comparative study. Renew. Sustain. Energy Rev. 2012, 16, 1268–1281. [Google Scholar] [CrossRef]
- Anvari-Moghaddam, A.; Seifi, A.R.; Niknam, T.; Alizadeh Pahlavani, M.R. Multi-objective operation management of a renewable micro grid with back-up micro turbine/fuel cell/battery hybrid power source. Energy 2011, 36, 6490–6507. [Google Scholar] [CrossRef]
- Singhal, P.K.; Sharma, R.N. Dynamic programming approach for solving power generating unit commitment problem. In Proceedings of the 2nd International Conference on Computer and Communication Technology (ICCCT), Allahabad, India, 15–17 September 2011; pp. 298–303.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ship Electric System Parameters | ||||||
| Parameters | Gen 1 | Gen 2 | Gen 3 | Gen 4 | Gen 5 | |
| Nominal power (MW) | 15 | 15 | 15 | 9 | 9 | |
| Minimum up/down time (h) | 1/1 | 1/1 | 1/1 | 1/1 | 1/1 | |
| Generator startup/shut-down cost * (m.u. **) | 0/0 | 0/0 | 0/0 | 0/0 | 0/0 | |
| Generator operation cost as function of the produced power (m.u./h) | 390 + 61.5∙P + 5.4∙P2 | 400 + 63∙P + 5.4∙P2 | 420 + 65∙P + 5.6∙P2 | 430 + 12∙P + 13.1∙P2 | 450 + 10∙P + 13.5∙P2 | |
| CO2 emissions (gCO2/g fuel) | 3.20 | 3.20 | 3.20 | 2.50 | 2.50 | |
| Fuel cost (m.u./kg) | 0.50 | 0.50 | 0.50 | 0.70 | 0.70 | |
| Technical minimum (MW) | 3 | 3 | 3 | 2 | 2 | |
| Technical maximum (MW) | 15 | 15 | 15 | 9 | 9 | |
| Ship Parameters | ||||||
| Type | RO-PAX Ferry | No. of Vehicles (nv) | 700 | Full Load Displacement (tns) | 70,000 | |
| Nominal speed (kn) | 24 | EEOImax1 (gCO2/tn.kn) | 27.5 | |||
| Maximum number of passengers | 2500 | EEOImax2 (gCO2/tn.h) | 165 | |||
| Part of Examined Route | Number of Passengers, | Number of Vehicles, | Ship Loading Factor, LF (tns) |
|---|---|---|---|
| Departure–Intermediate port | 1955 | 600 | 58,616 |
| Intermediate port–Final Destination | 1720 | 500 | 49,515 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kanellos, F.D.; Anvari-Moghaddam, A.; Guerrero, J.M. Smart Shipboard Power System Operation and Management. Inventions 2016, 1, 22. https://doi.org/10.3390/inventions1040022
Kanellos FD, Anvari-Moghaddam A, Guerrero JM. Smart Shipboard Power System Operation and Management. Inventions. 2016; 1(4):22. https://doi.org/10.3390/inventions1040022
Chicago/Turabian StyleKanellos, Fotis D., Amjad Anvari-Moghaddam, and Josep M. Guerrero. 2016. "Smart Shipboard Power System Operation and Management" Inventions 1, no. 4: 22. https://doi.org/10.3390/inventions1040022
APA StyleKanellos, F. D., Anvari-Moghaddam, A., & Guerrero, J. M. (2016). Smart Shipboard Power System Operation and Management. Inventions, 1(4), 22. https://doi.org/10.3390/inventions1040022