Transformer Coupling and Its Modelling for the Flux-Ramp Modulation of rf-SQUIDs



 , , , and
, , , and
Abstract
1. Introduction
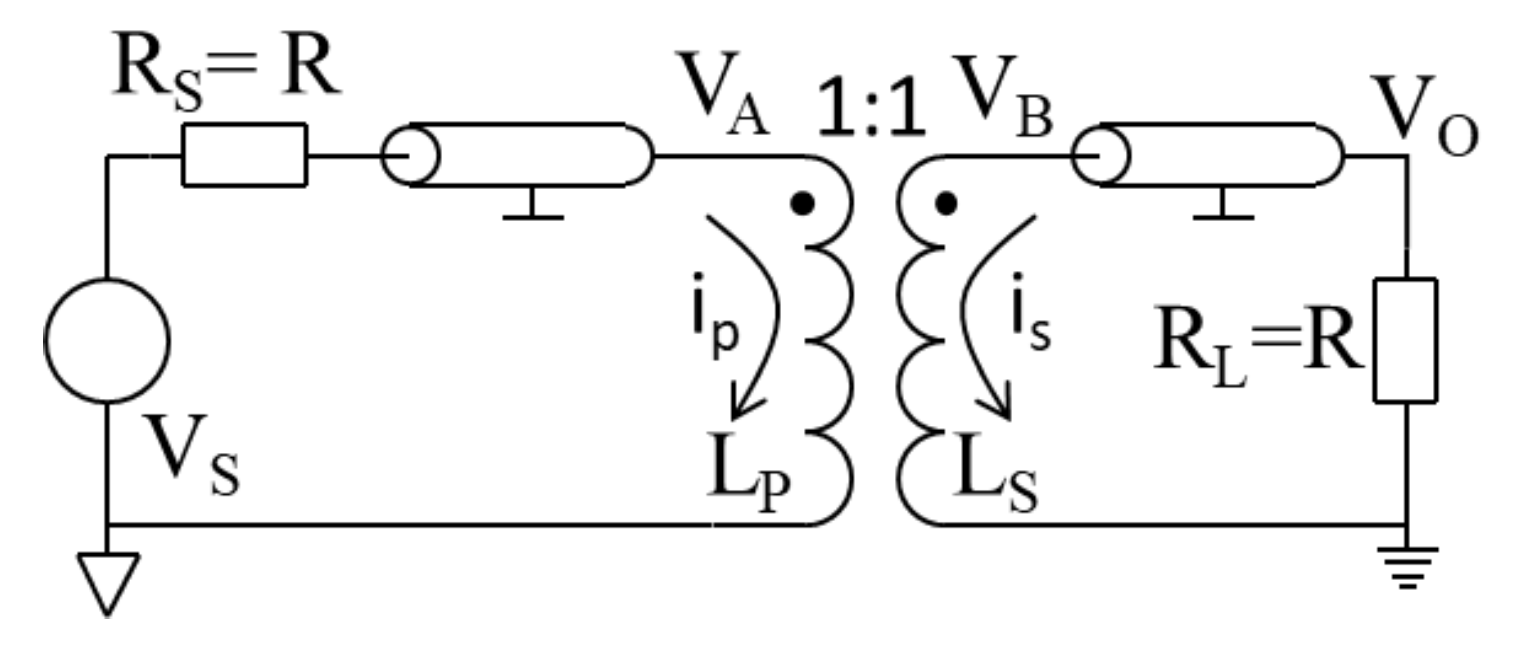
2. Principles of Operation and Modeling
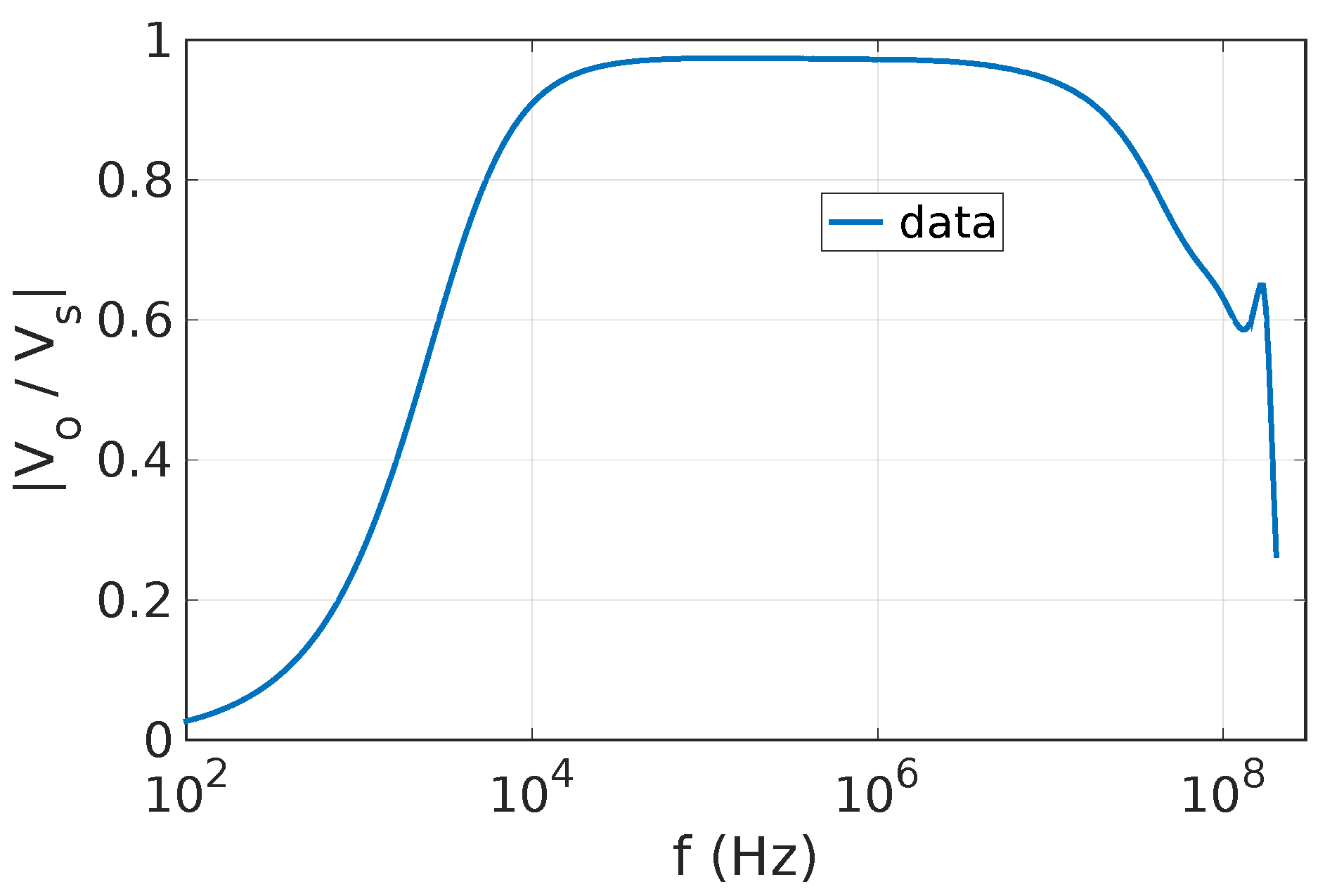
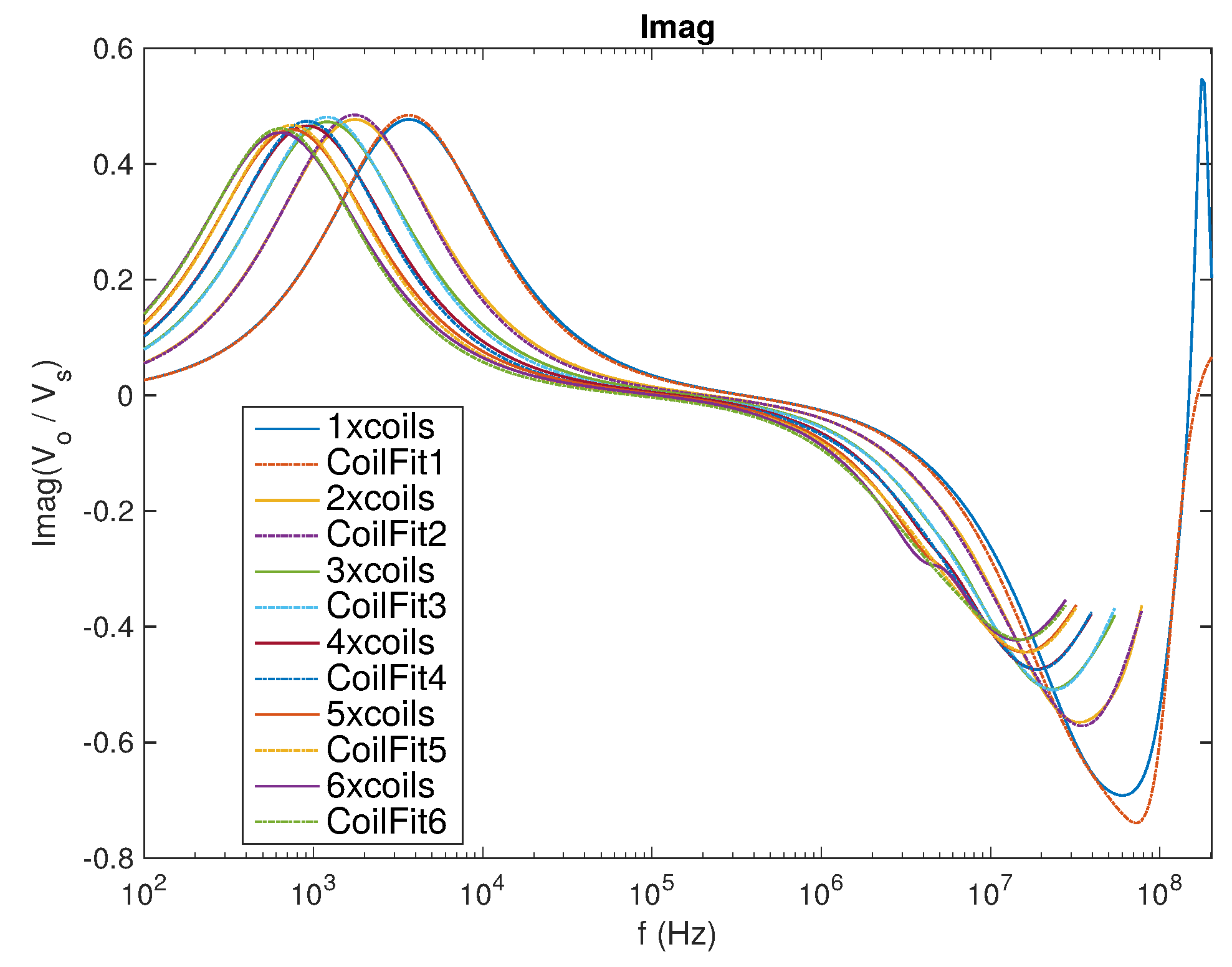
- The first deviation from the ideal model can be appreciated from the measured transfer function obtained with the selected transformer (Würth Elektronik 749012011), shown in Figure 4: A high-frequency roll-off, not predicted by (6), is present. We have verified that this high-frequency limitation deteriorates if the value of the load impedance is decreased. This can be modeled with the presence of a small parasitic inductance in series to the output of the transformer, forming a low pass filter with termination resistance .
- The roll-off gets a 20 dB/dec slope, due to the pole , only at high frequency, but shows a smaller slope near its db frequency. This second effect can be accounted for by the presence of some distributed parasitic capacitance between and within the coils.
- Lower the value of : In this case, the signal will be attenuated and will need to be increased to maintain the appropriate output value (there is a lower limit in frequency beyond which the transformer core saturates); and/or
- Increase the value of the inductance of the primary coil.
3. The Trimmable-Transformer Set-Up and Results
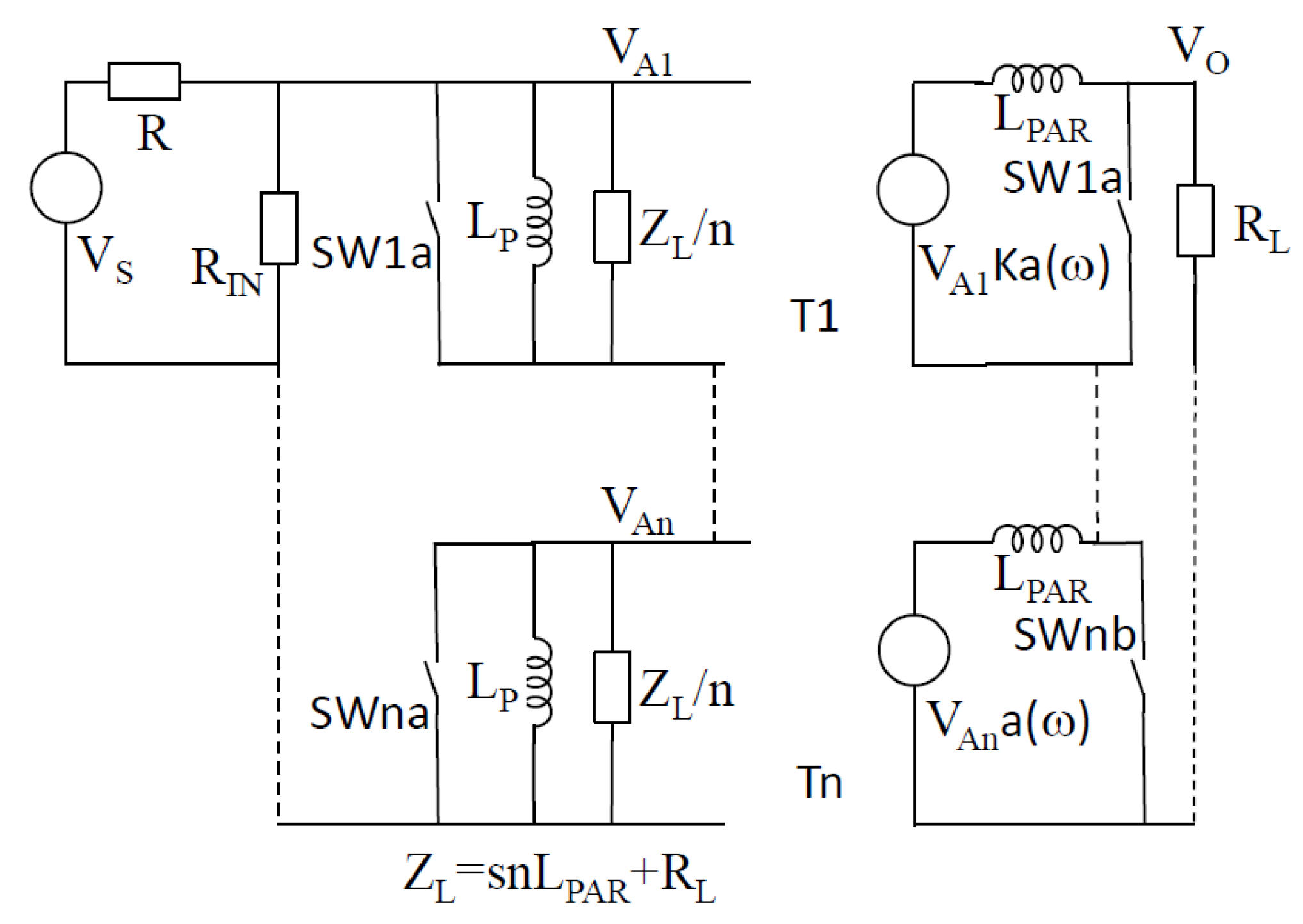
3.1. Circuit Description
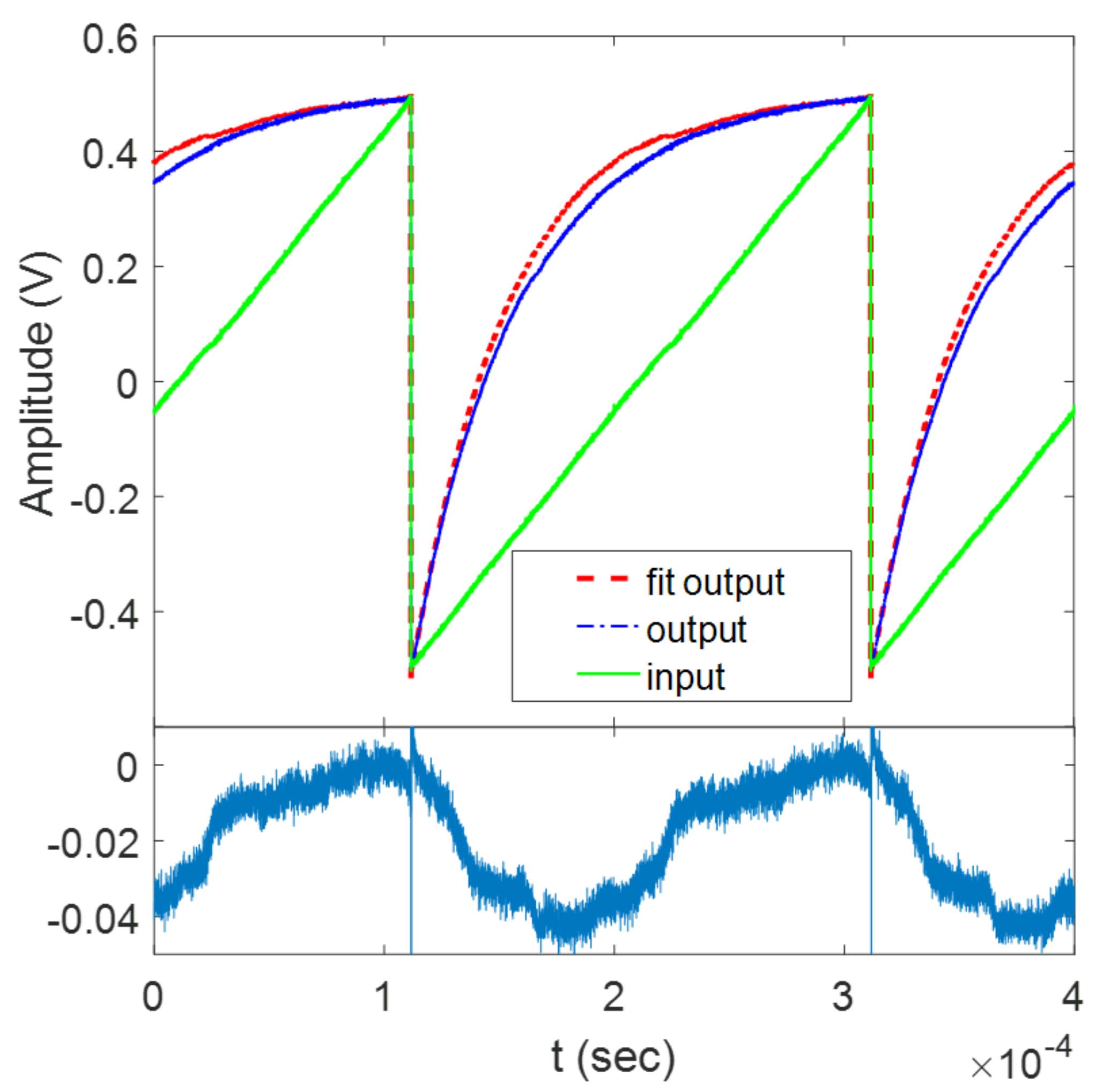
3.2. Measurement Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alpert, B.; Balata, M.; Bennett, D.; Biasotti, M.; Boragno, C.; Brofferio, C.; Ceriale, V.; Corsini, D.; Day, P.K.; de Gerone, M.; et al. HOLMES. EPJ C 2015, 75, 112. [Google Scholar] [CrossRef] [PubMed]
- Hays-Wehle, J.P.; Schmidt, D.R.; Ullom, J.N.; Swetz, D.S. Thermal Conductance Engineering for High-Speed TES Microcalorimeters. J. Low Temp. Phys. 2016, 184, 492. [Google Scholar] [CrossRef]
- Orlando, A.; Ceriale, V.; Ceruti, G.; de Gerone, M.; Faverzani, M.; Ferri, E.; Gallucci, G.; Giachero, A.; Nucciotti, A.; Puiu, D.; et al. Microfabrication of Transition-Edge Sensor Arrays of Microcalorimeters with 163 Ho for Direct Neutrino Mass Measurements with HOLMES. J. Low Temp. Phys. 2018, 193, 771–776. [Google Scholar] [CrossRef]
- Barone, A.; Paternò, G. Physics and Applications of the Josephson Effect; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1982. [Google Scholar]
- Clarke, J.; Braginski, A.I. The SQUID Handbook, Vol. I Fundamentals and Technology of SQUIDs and SQUID Systems; WILEY-VCH Verlag GmbH & Co. KGaA: Weinheim, Germany, 2004. [Google Scholar]
- Fagaly, R.L. Superconducting quantum interference device instruments and applications. Rev. Sci. Instrum. 2006, 77, 101101. [Google Scholar] [CrossRef]
- Giffard, R.P.; Webb, R.A.; Wheatley, J.C. Principles and Methods of Low-Frequency Electric and Magnetic Measurements Using an rf-Biased Point-Contact Superconducting Device. J. Low Temp. Phys. 1972, 6, 533–610. [Google Scholar] [CrossRef]
- Mates, J.A.B.; Irwin, K.D.; Vale, L.R.; Hilton, G.C.; Gao, J.; Lehnert, K.W. Flux-Ramp Modulation for SQUID Multiplexing. J. Low Temp. Phys. 2012, 167, 707. [Google Scholar] [CrossRef]
- Noroozian, O.; Mates, J.A.B.; Bennett, D.A.; Brevik, J.A.; Fowler, J.W.; Gao, J.; Hilton, G.C.; Horansky, R.D.; Irwin, K.D.; Kang, Z.; et al. Hig-resolution gamma-ray spectroscopy with a microwave-multiplexed transition-edge sensor array. Appl. Phys. Lett. 2013, 103, 202602. [Google Scholar] [CrossRef]
- Mates, J.A.B.; Hilton, G.C.; Irwin, K.D.; Lehnert, K.W.; Vale, L.R. Demonstration of a multiplexer of dissipationless superconducting quantum interference devices. Appl. Phys. Lett. 2008, 92, 023514. [Google Scholar] [CrossRef]
- Martinez, J.A.; Mork, B.A. Transformer Modeling for Low- and Mid-Frequency Transients—A Review. IEEE Trans. Power Deliv. 2005, 20, 1625–1632. [Google Scholar] [CrossRef]
- Lu, H.Y.; Zhu, J.G.; Hui, S.Y.R. Experimental Determination of Stray Capacitances in High Frequency Transformers. IEEE Trans. Power Electron. 2003, 18, 1105–1112. [Google Scholar]
- Abeywickrama, N.; Serdyuk, Y.V.; Gubanski, S.M. High-Frequency Modeling of Power Transformers for Use in Frequency Response Analysis (FRA). IEEE Trans. Power Deliv. 2008, 23, 2042–2049. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, F.; Liang, G. A High-Frequency Circuit Model of a Potential Transformer for the Very Fast Transient Simulation in GIS. IEEE Trans. Power Deliv. 2008, 23, 1995–1999. [Google Scholar]
- Morched, A.; Mad, L.; Ottevangers, J. A High Frequency Transformer Model for the EMTP. IEEE Trans. Power Deliv. 1993, 8, 1615–1626. [Google Scholar] [CrossRef]
- Tziouvaras, D.A.; McLaren, P.; Alexander, G.; Dawson, D.; Esztergalyos, J.; Fromen, C.; Glinkowski, M.; Hasenwinkle, I.; Kezunovic, M.; Kojovic, L.; et al. Mathematical Models for Current, Voltage, and Coupling Capacitor Voltage Transformers. IEEE Trans. Power Deliv. 2000, 15, 62–71. [Google Scholar] [CrossRef]
- Vaessen, P.T.M.; Kema, N.V. Transformer Model For High Frequencies. IEEE Trans. Power Deliv. 1998, 3, 1761–1768. [Google Scholar] [CrossRef]
- Islam, S.M.; Coates, K.M.; Ledwich, G. Identification of High Frequency Transformer Equivalent Circuit Using Matlab from Frequency Domain Data. In Proceedings of the IEEE Industry Applications Society Annual Meeting, New Orleans, LA, USA, 5–9 October 1997; pp. 357–364. [Google Scholar]
- Dessaint, L.A.; Al-Haddad, K.; Le-Huy, H.; Sybille, G.; Brunelle, P. A Power System Simulation Tool Based on Simulink. IEEE Trans. Ind. Electron. 1999, 46, 1252–1254. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [H] | [nH] | K | [MHz] | [MHz] | [MHz] | [MHz] | |
|---|---|---|---|---|---|---|---|
| Pedestal | 0 | 200 | 0.97 | ||||
| Slope | 1030 | 300 | −0.008 | ||||
| Valid for n = 1 | −72 | 138 | −150 | −150 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carniti, P.; Cassina, L.; Faverzani, M.; Ferri, E.; Giachero, A.; Gotti, C.; Maino, M.; Nucciotti, A.; Pessina, G.; Puiu, A. Transformer Coupling and Its Modelling for the Flux-Ramp Modulation of rf-SQUIDs. Instruments 2019, 3, 3. https://doi.org/10.3390/instruments3010003
Carniti P, Cassina L, Faverzani M, Ferri E, Giachero A, Gotti C, Maino M, Nucciotti A, Pessina G, Puiu A. Transformer Coupling and Its Modelling for the Flux-Ramp Modulation of rf-SQUIDs. Instruments. 2019; 3(1):3. https://doi.org/10.3390/instruments3010003
Chicago/Turabian StyleCarniti, Paolo, Lorenzo Cassina, Marco Faverzani, Elena Ferri, Andrea Giachero, Claudio Gotti, Matteo Maino, Angelo Nucciotti, Gianluigi Pessina, and Andrei Puiu. 2019. "Transformer Coupling and Its Modelling for the Flux-Ramp Modulation of rf-SQUIDs" Instruments 3, no. 1: 3. https://doi.org/10.3390/instruments3010003
APA StyleCarniti, P., Cassina, L., Faverzani, M., Ferri, E., Giachero, A., Gotti, C., Maino, M., Nucciotti, A., Pessina, G., & Puiu, A. (2019). Transformer Coupling and Its Modelling for the Flux-Ramp Modulation of rf-SQUIDs. Instruments, 3(1), 3. https://doi.org/10.3390/instruments3010003