

Individual Fish Echo Detection Method Based on Peak Delay Estimation and Instantaneous Frequency Characterization

Abstract
:1. Introduction
2. Materials and Methods
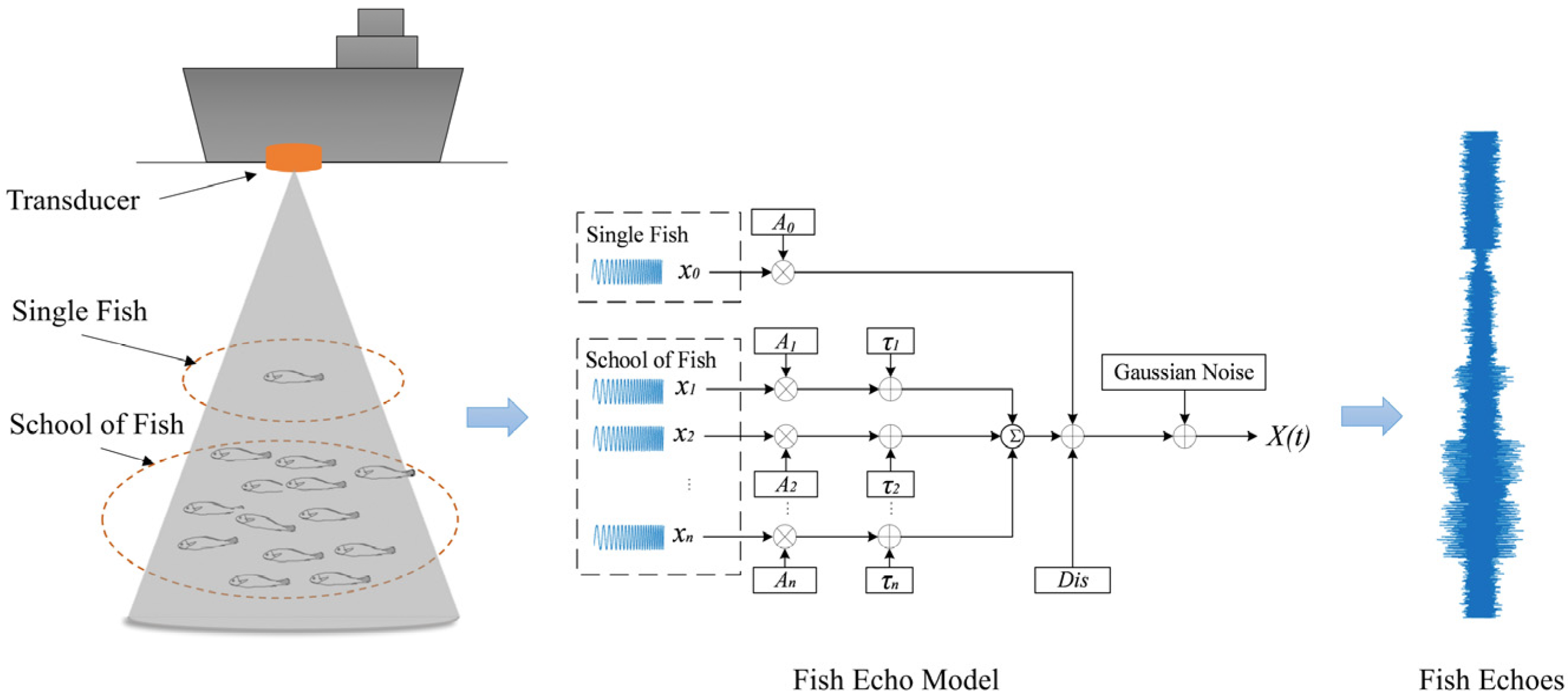
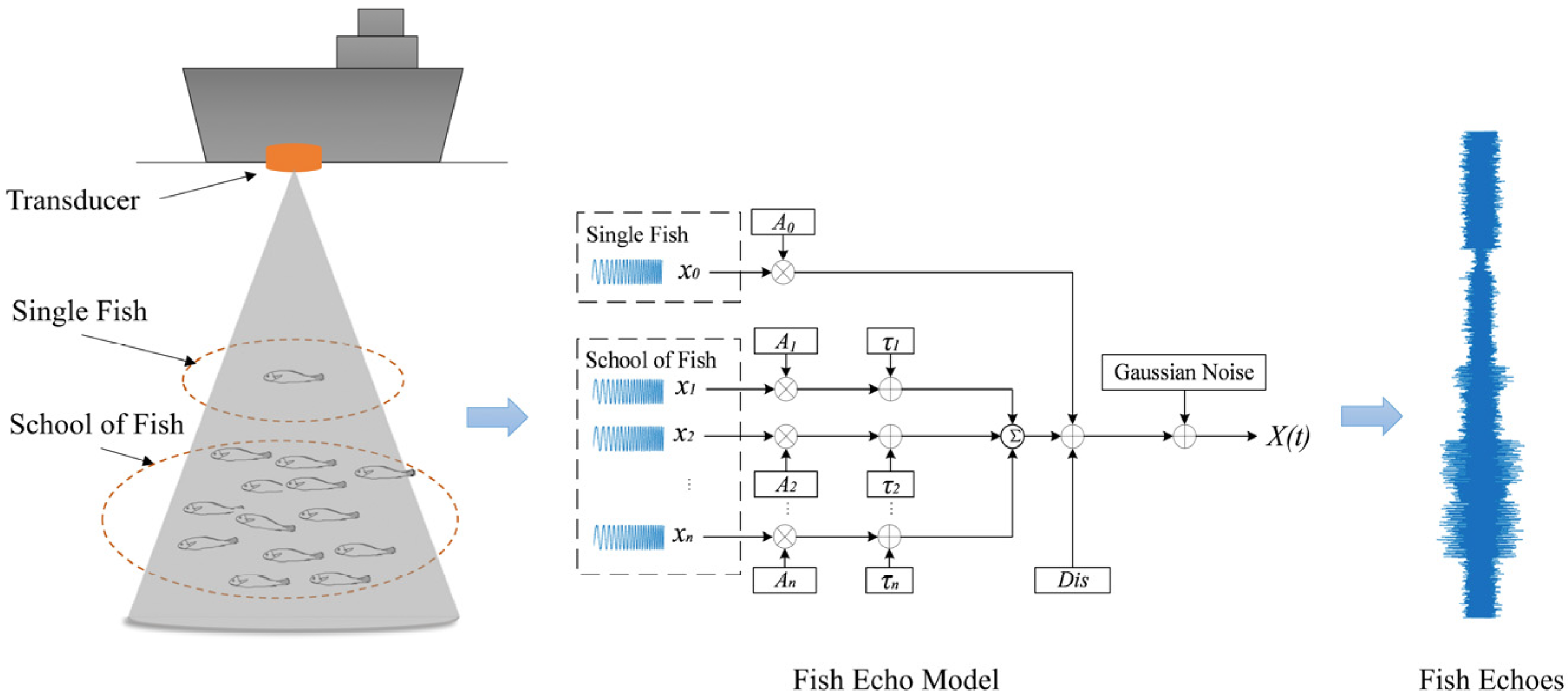
2.1. Detection Principle
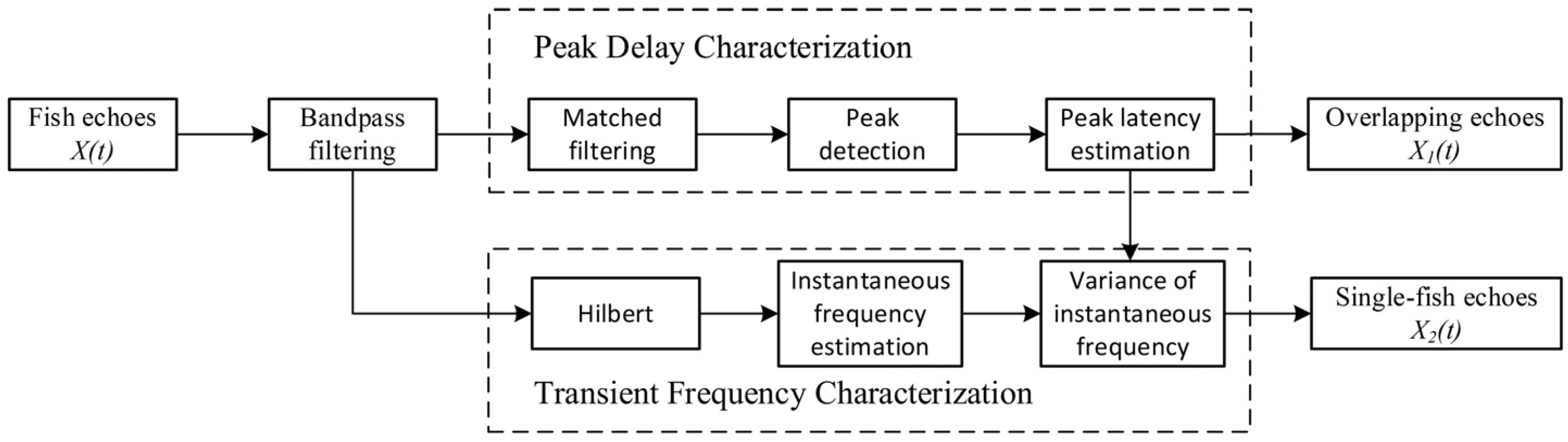
2.2. Detection Methods
2.2.1. Detection and Echo Signals
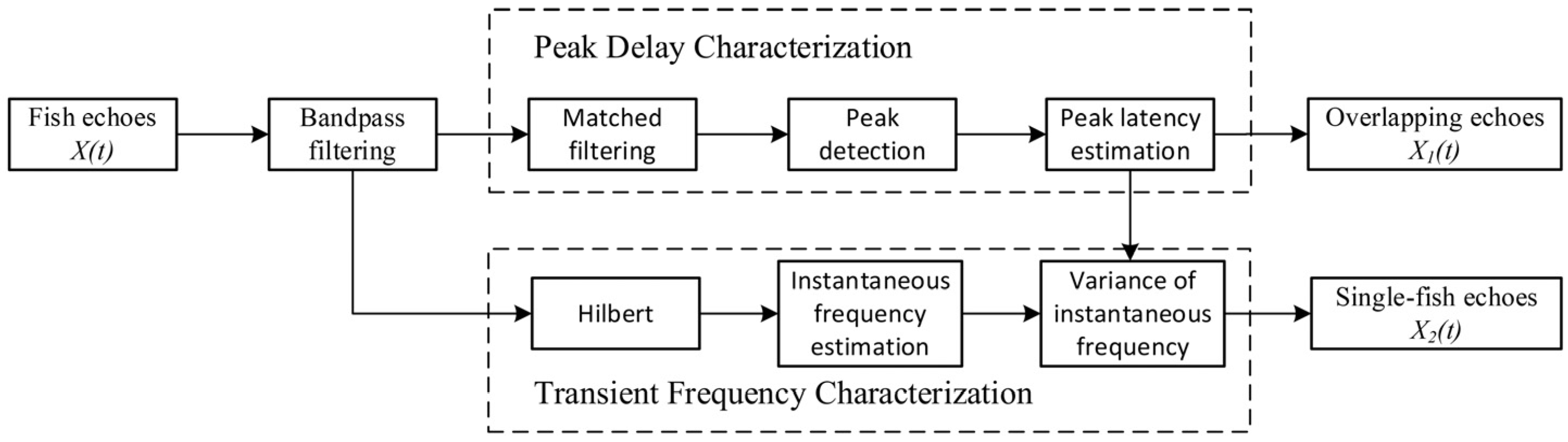
2.2.2. Detection of Single Fish Echoes Based on Peak Delay Characteristics
2.2.3. Detection of Single Fish Echoes Based on Instantaneous Frequency Characteristics
2.2.4. Simulation and Threshold Setting
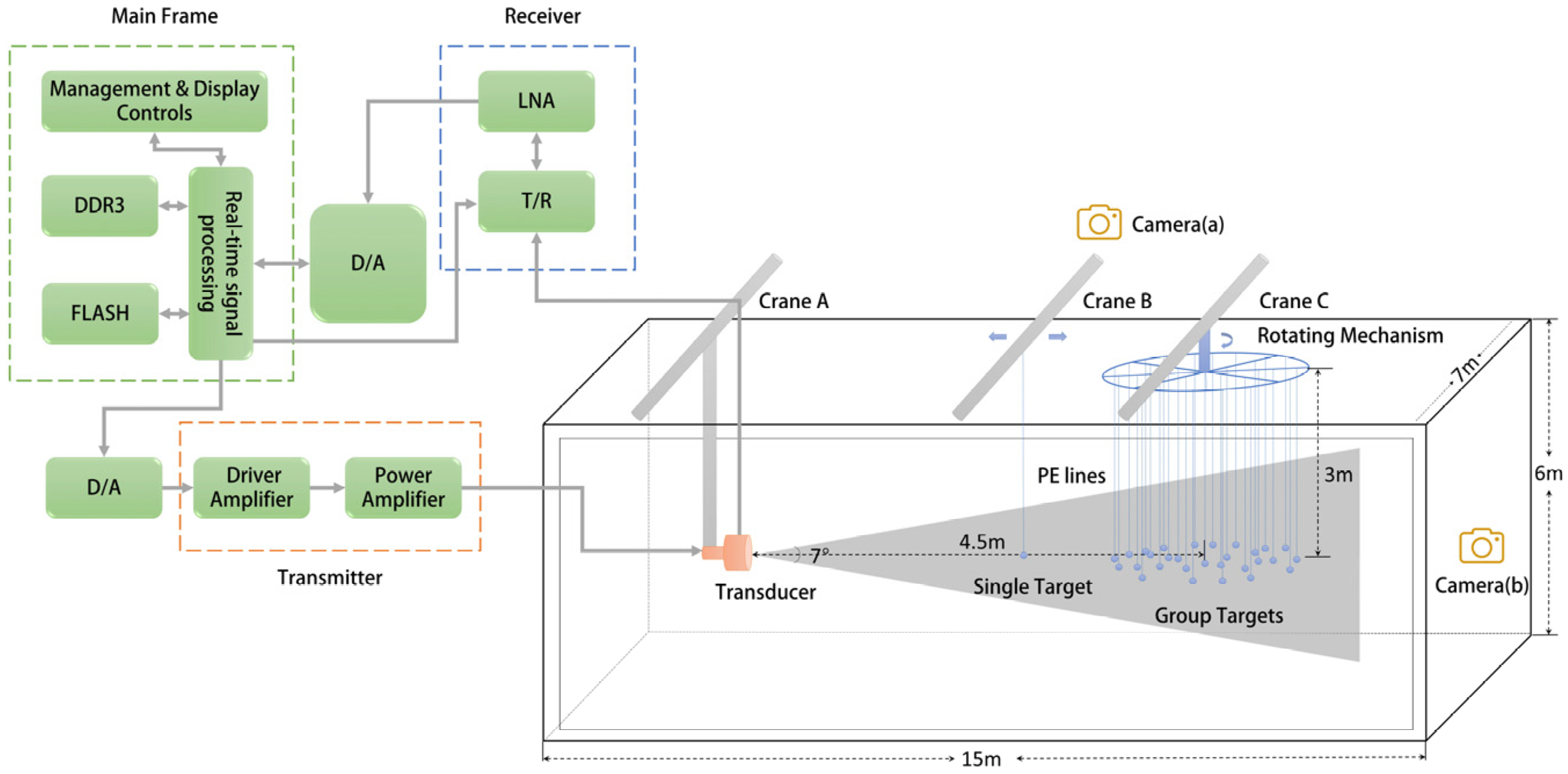
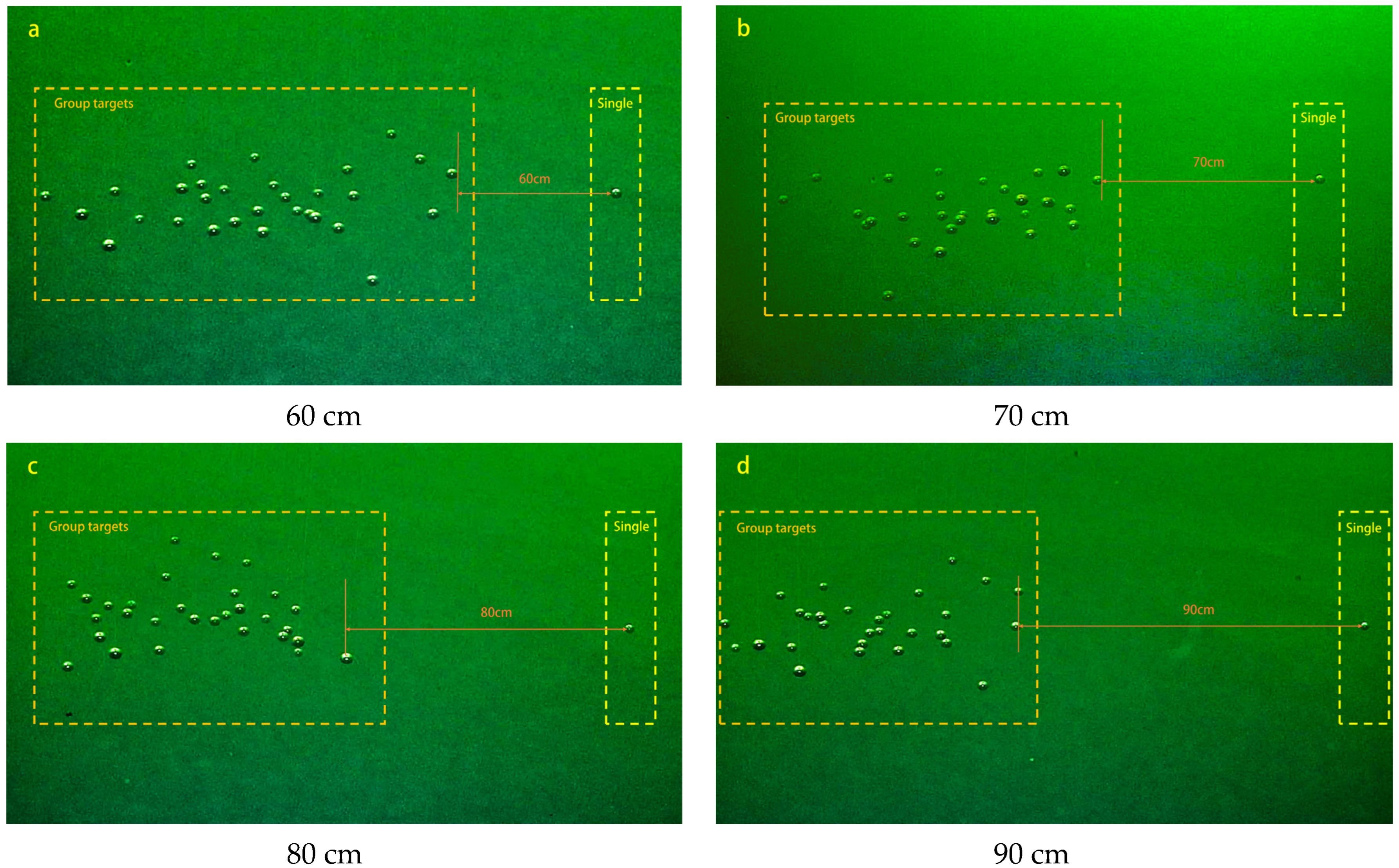
2.3. Measurement Method
2.3.1. Apparatus Configuration
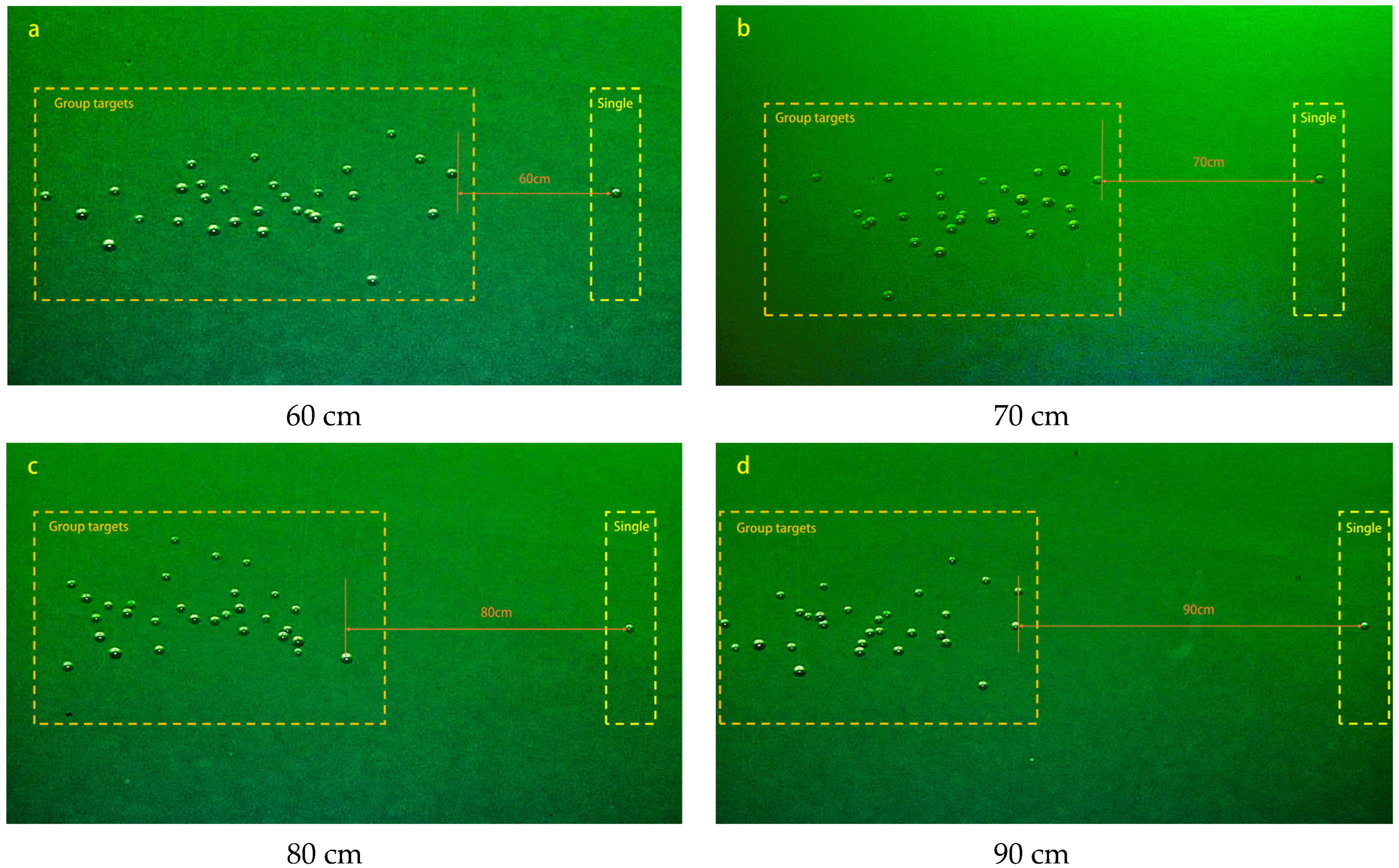
2.3.2. Echo Acquisition
3. Results
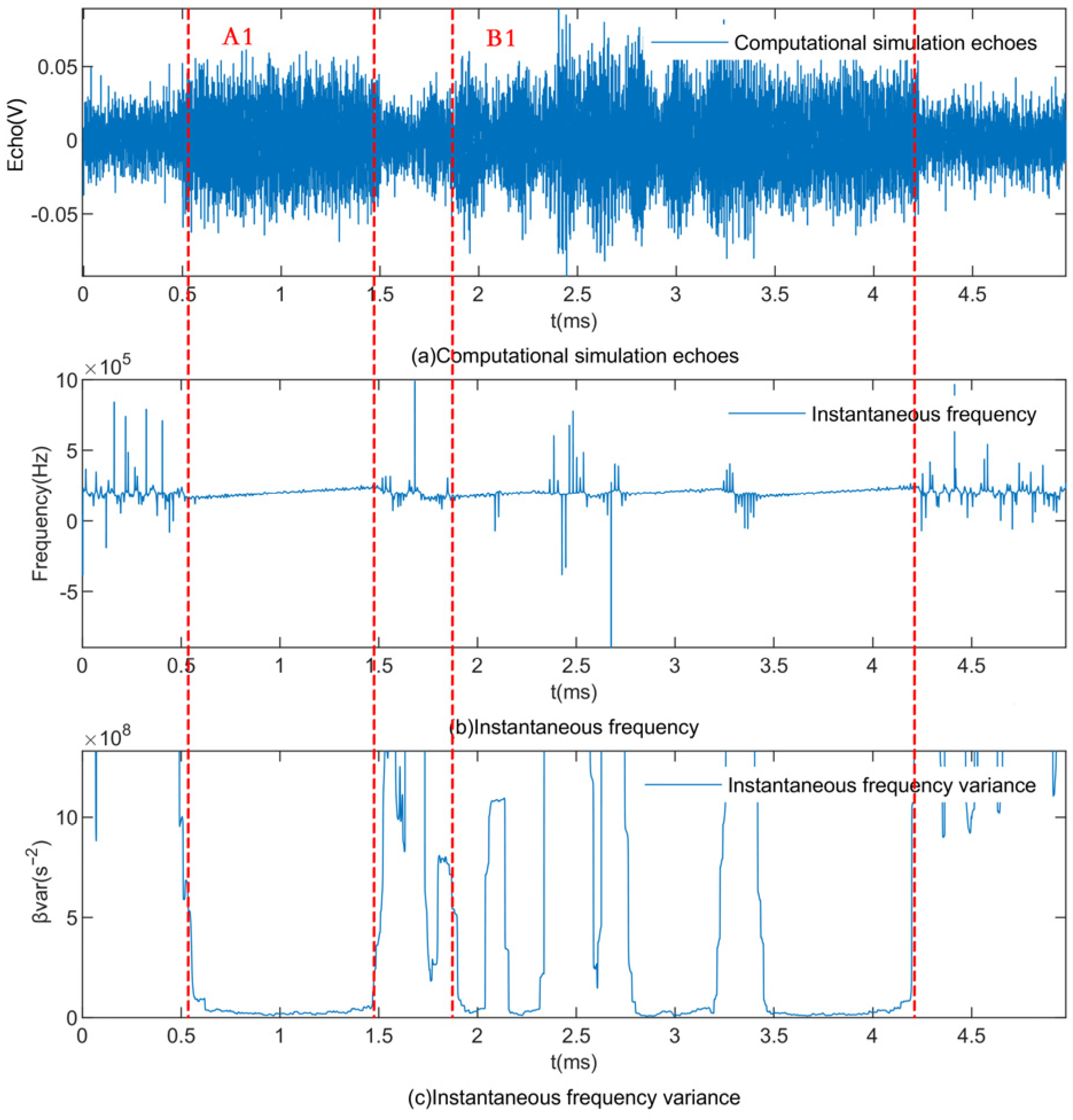
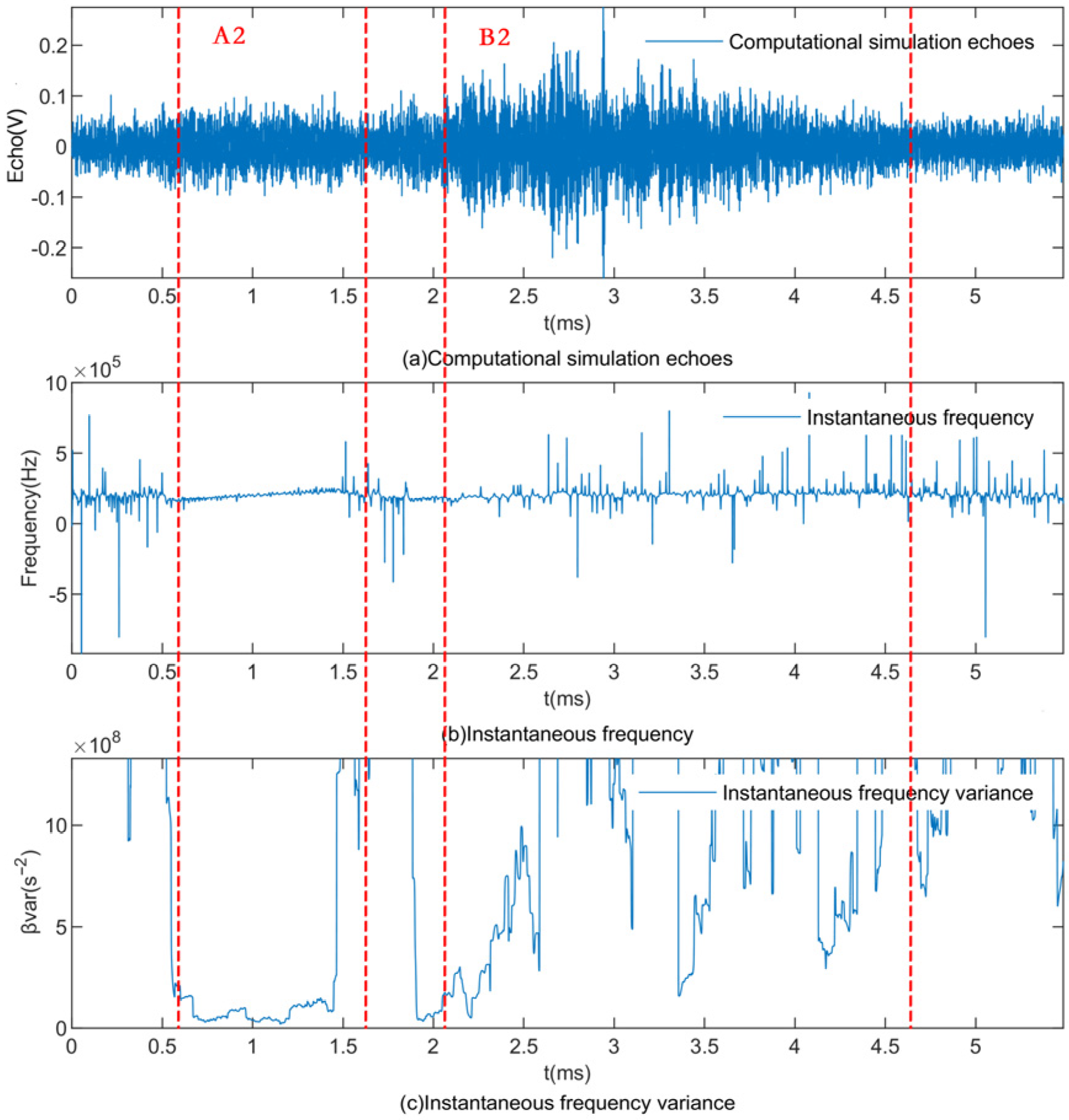
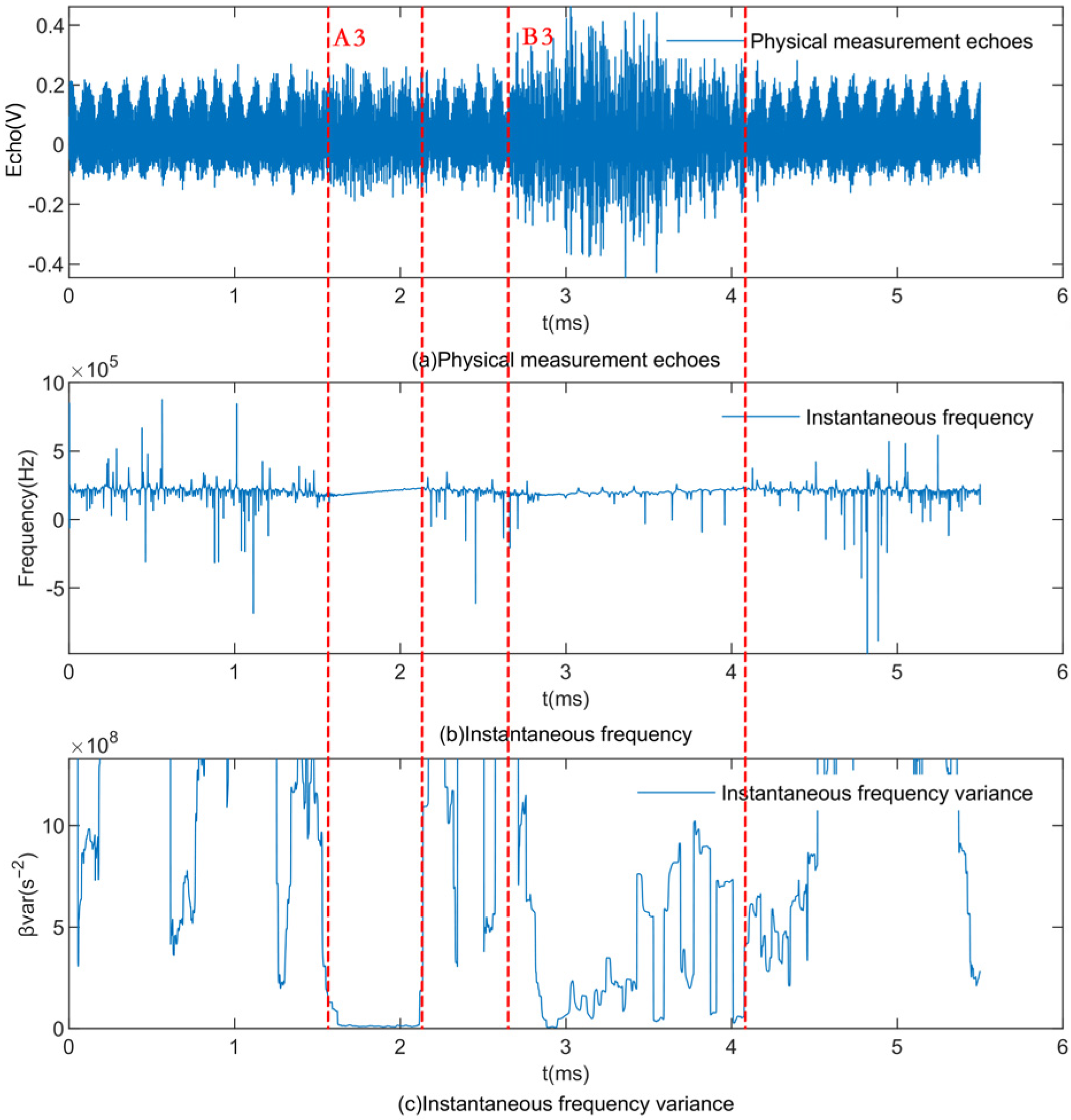
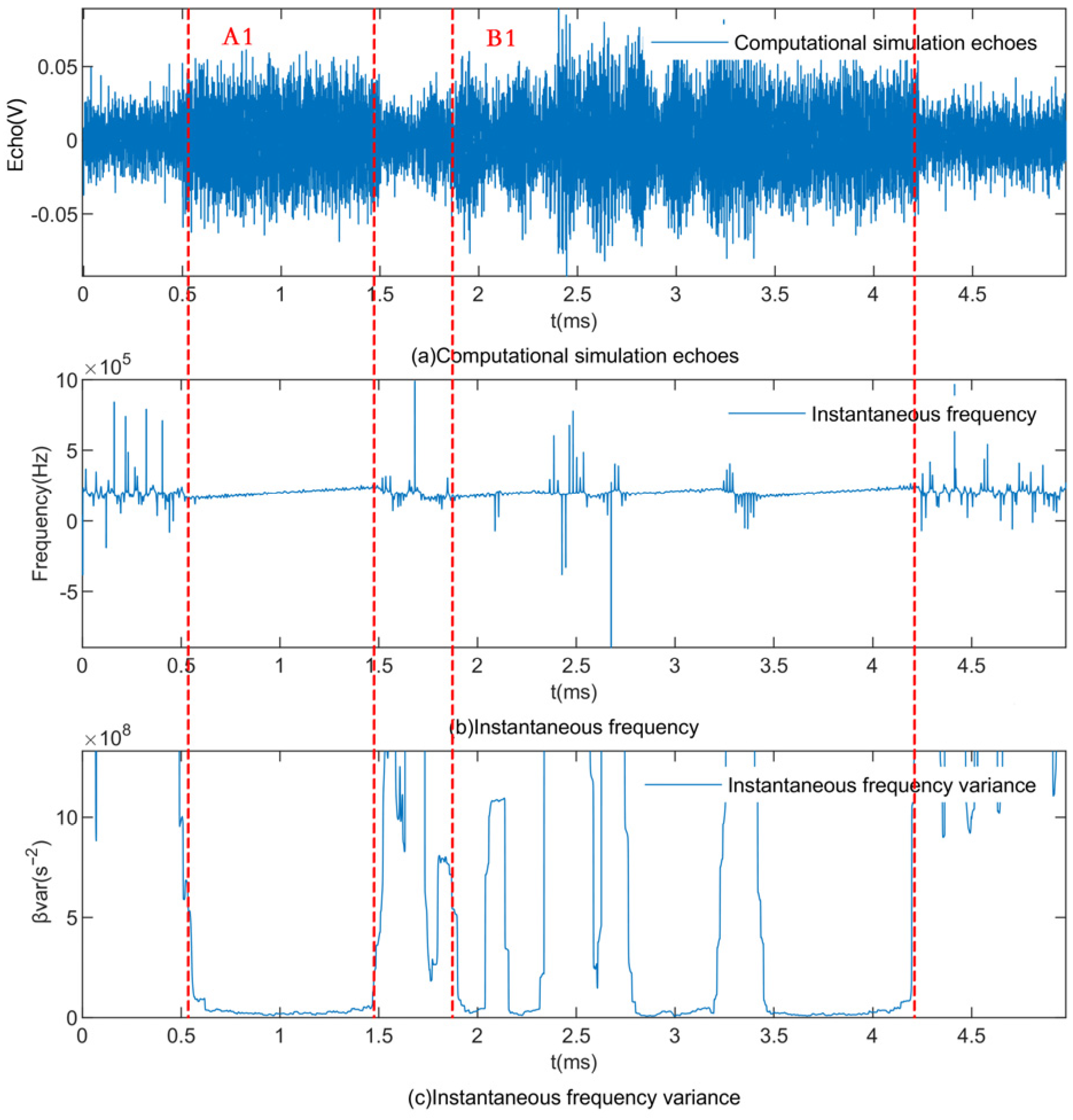
3.1. Instantaneous Frequency Estimation
3.2. Single Target Echo Detection Performance in Computational Simulations
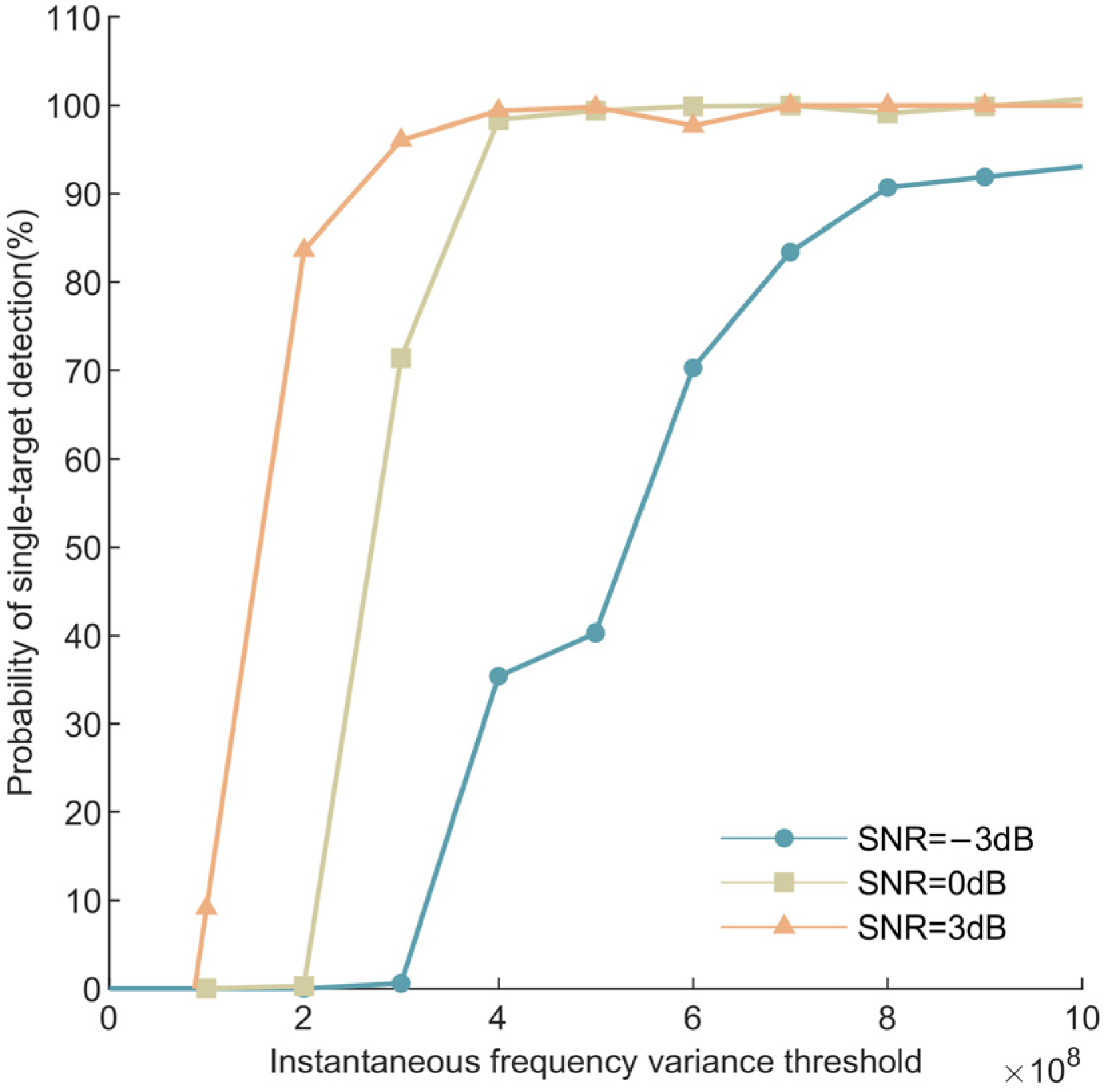
3.2.1. Effect of Instantaneous Frequency Variance Threshold on Single Target Detection Probability in Computational Simulations
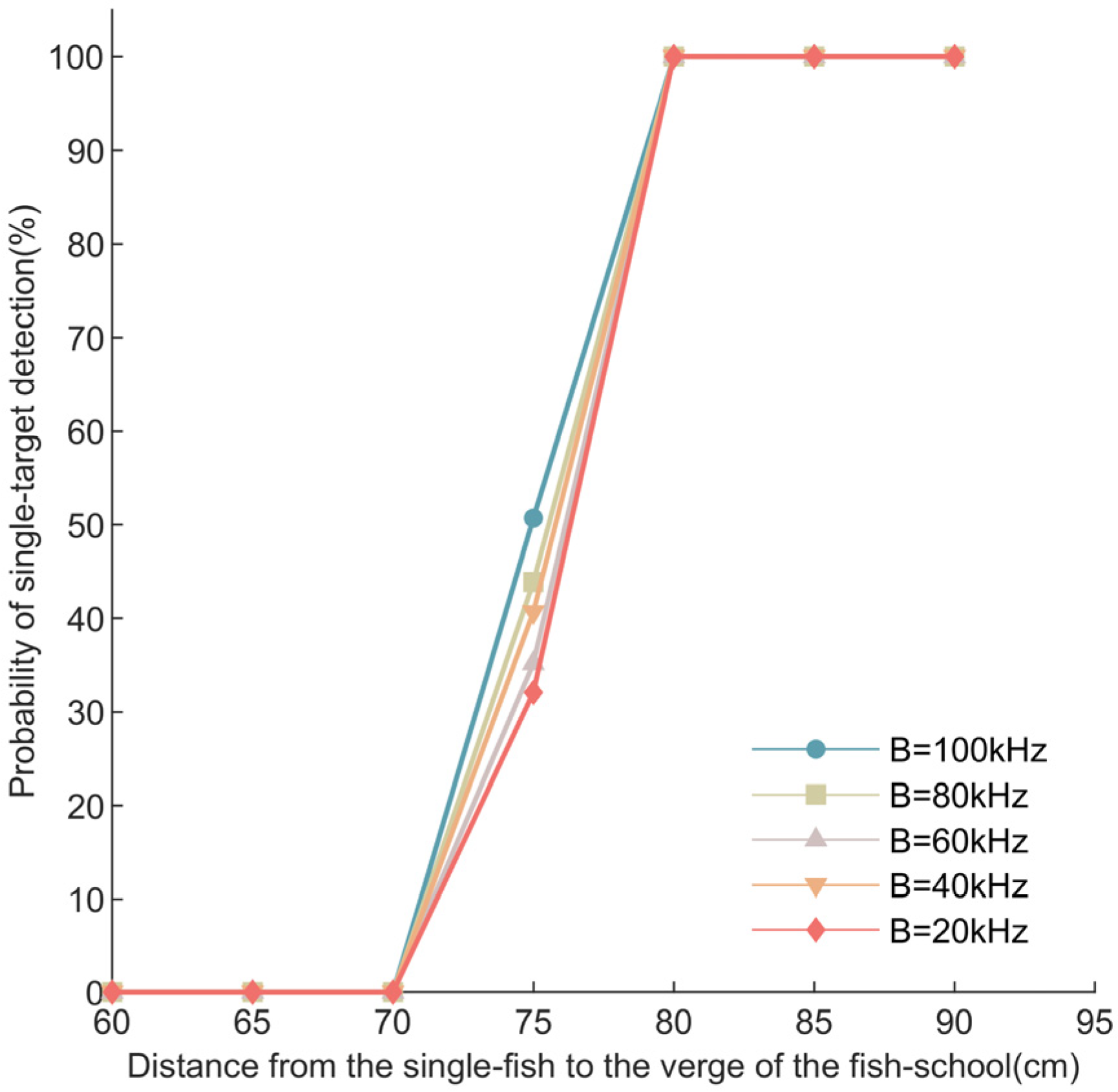
3.2.2. Effect of Monomer Group Spacing and Signal-To-Noise Ratio on Monomer Target Recognition Probability in Computational Simulations
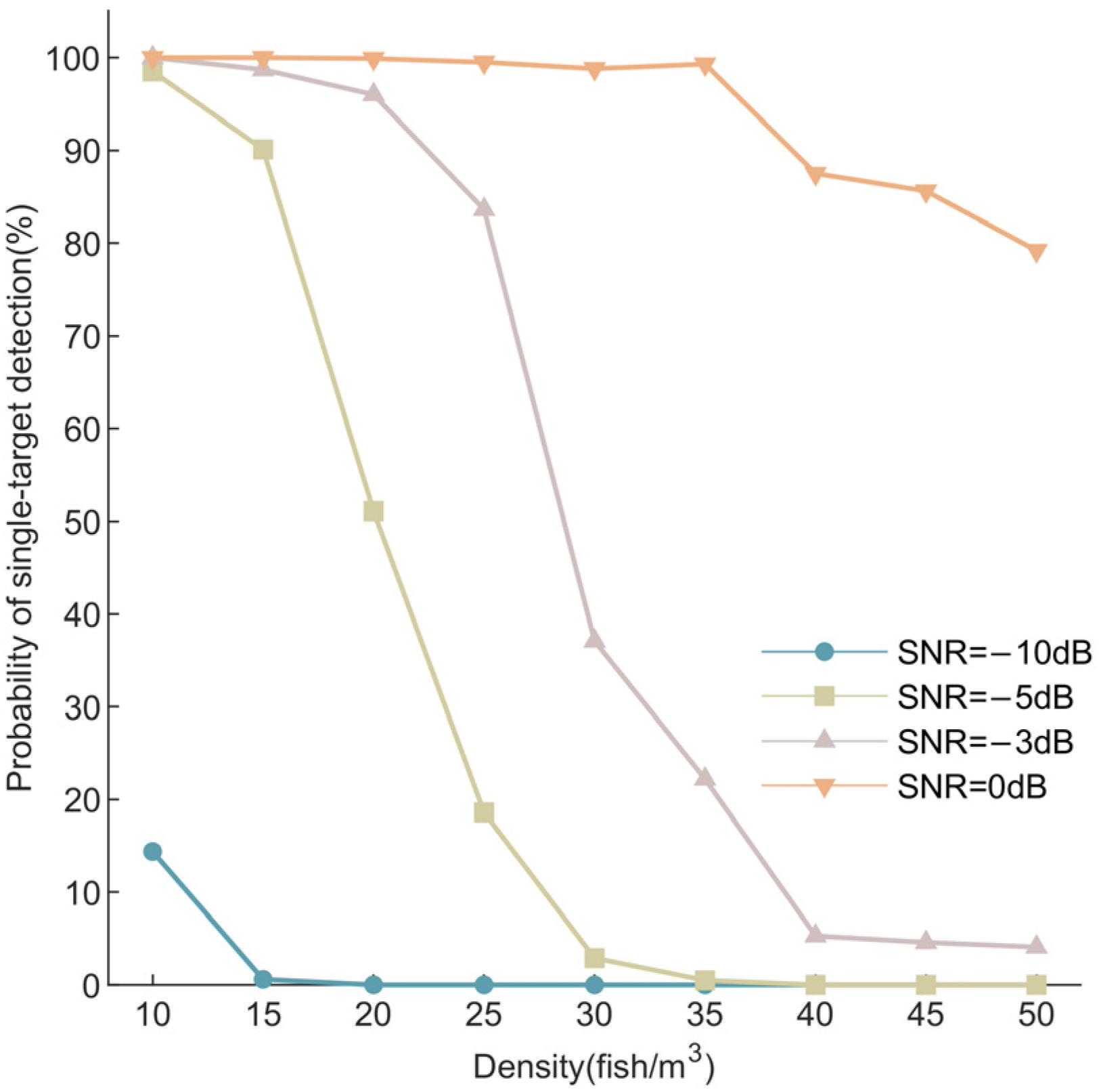
3.2.3. Effect of Fish School Density on Detection Probability in Computational Simulations
3.2.4. Probability of Overlapping Echoes Misclassified as Single Echoes in Computational Simulations
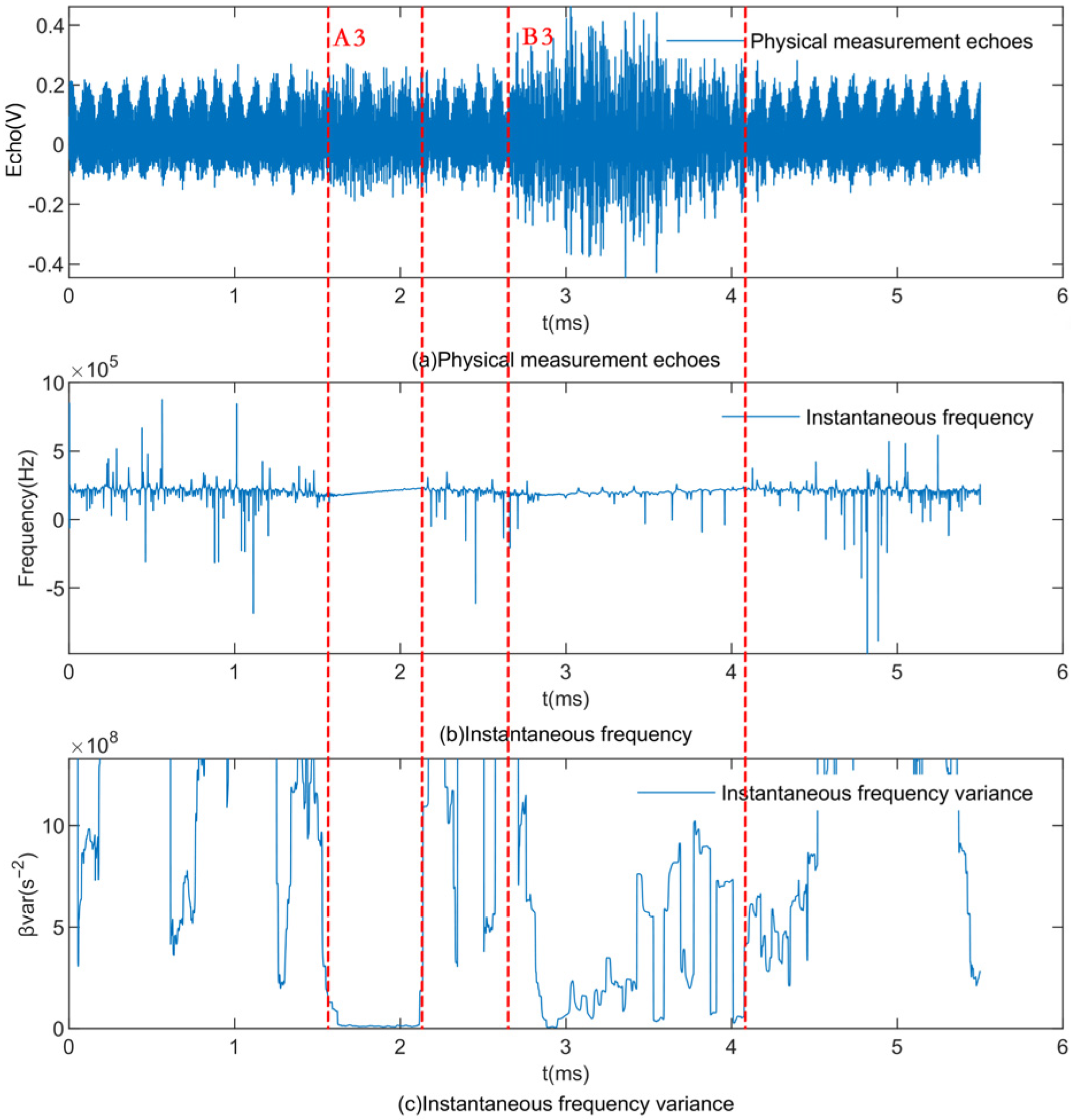
3.3. Single Target Echo Detection Performance in Physical Measurements
4. Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Benoit-Bird, K.J.; Waluk, C.M. Exploring the promise of broadband fisheries echo sounders for species discrimination with quantitative assessment of data processing effects. J. Acoust. Soc. Am. 2020, 147, 411–427. [Google Scholar] [CrossRef] [PubMed]
- Homma, H.; Ostrovsky, I. The relationship between target strength frequency response and vertical swim velocity: A new approach for fish discrimination. Aquat. Living Resour. 2021, 34, 11. [Google Scholar] [CrossRef]
- Damptey-Boakye, A. Extracting Single Target Information from a Simple Echo Sounder Mounted on a Drifting Fish Aggregating Device (FAD). Master’s Thesis, The University of Bergen, Bergen, Norway, 2015. [Google Scholar]
- Puig-Pons, V.; Muñoz-Benavent, P.; Pérez-Arjona, I.; Ladino, A.; Llorens-Escrich, S.; Andreu-García, G.; Valiente-González, J.M.; Atienza-Vanacloig, V.; Ordoñez-Cebrian, P.; Pastor-Gimeno, J.I.; et al. Estimation of Bluefin Tuna (Thunnus thynnus) mean length in sea cages by acoustical means. Appl. Acoust. 2022, 197, 108960. [Google Scholar] [CrossRef]
- Dunning, J.; Jansen, T.; Fenwick, A.J.; Fernandes, P.G. A new in-situ method to estimate fish target strength reveals high variability in broadband measurements. Fish. Res. 2023, 261, 106611. [Google Scholar] [CrossRef]
- Kubilius, R.; Macaulay, G.J.; Ona, E. Remote sizing of fish-like targets using broadband acoustics. Fish. Res. 2020, 228, 105568. [Google Scholar] [CrossRef]
- Soule, M.; Barange, M.; Hampton, I. Evidence of bias in estimates of target strength obtained with a split-beam echo-sounder. ICES J. Mar. Sci. 1995, 52, 139–144. [Google Scholar] [CrossRef]
- Ito, M.; Matsuo, I.; Imaizumi, T.; Akamatsu, T.; Wang, Y.; Nishimori, Y. Target strength spectra of tracked individual fish in schools. Fish. Sci. 2015, 81, 621–633. [Google Scholar] [CrossRef]
- Scoulding, B.; Gastauer, S.; MacLennan, D.N.; Fässler, S.M.; Copland, P.; Fernandes, P.G. Effects of variable mean target strength on estimates of abundance: The case of Atlantic mackerel (Scomber scombrus). ICES J. Mar. Sci. 2017, 74, 822–831. [Google Scholar] [CrossRef]
- Soule, M.; Hampton, I.; Barange, M. Potential improvements to current methods of recognizing single targets with a split-beam echo-sounder. ICES J. Mar. Sci. 1996, 53, 237–243. [Google Scholar] [CrossRef]
- Soule, M.; Barange, M.; Solli, H.; Hampton, I. Performance of a new phase algorithm for discriminating between single and overlapping echoes in a split-beam echosounder. ICES J. Mar. Sci. 1997, 54, 934–938. [Google Scholar] [CrossRef]
- Demer, D.; Andersen, L.; Bassett, C.; Berger, L.; Chu, D.; Condiotty, J.; Cutter, G. Evaluation of a wideband echosounder for fisheries and marine ecosystem science. ICES Coop. Res. Rep. 2017, 336, 2318. [Google Scholar]
- Chu, D.; Stanton, T.K. Application of pulse compression techniques to broadband acoustic scattering by live individual zooplankton. J. Acoust. Soc. Am. 1998, 104, 39–55. [Google Scholar] [CrossRef]
- Stanton, T.K. 30 years of advances in active bioacoustics: A personal perspective. Methods Oceanogr. 2012, 1, 49–77. [Google Scholar] [CrossRef]
- Ehrenberg, J.E.; Torkelson, T.C. FM slide (chirp) signals: A technique for significantly improving the signal-to-noise performance in hydroacoustic assessment systems. Fish. Res. 2000, 47, 193–199. [Google Scholar] [CrossRef]
- Lavery, A.C.; Bassett, C.; Lawson, G.L.; Jech, J.M. Exploiting signal processing approaches for broadband echosounders. ICES J. Mar. Sci. 2017, 74, 2262–2275. [Google Scholar] [CrossRef]
- Cotter, E.; Bassett, C.; Lavery, A. Comparison of mesopelagic organism abundance estimates using in situ target strength measurements and echo-counting techniques. JASA Express Lett. 2021, 1, 40801. [Google Scholar] [CrossRef]
- Cotter, E.; Bassett, C.; Lavery, A. Classification of broadband target spectra in the mesopelagic using physics-informed machine learning. J. Acoust. Soc. Am. 2021, 149, 3889–3901. [Google Scholar] [CrossRef]
- Bhattacharyya, A.; Singh, L.; Pachori, R.B. Fourier–Bessel series expansion based empirical wavelet transform for analysis of non-stationary signals. Digit. Signal Process. 2018, 78, 185–196. [Google Scholar] [CrossRef]
- Wang, S.; Zeng, X. Robust underwater noise targets classification using auditory inspired time–frequency analysis. Appl. Acoust. 2014, 78, 68–76. [Google Scholar] [CrossRef]
- Jia, H.; Li, X. Underwater reverberation suppression based on non-negative matrix factorisation. J. Sound Vib. 2021, 506, 116166. [Google Scholar] [CrossRef]
- Meng, X.; Jakobsson, A.; Li, X.; Lei, Y. Estimation of chirp signals with time-varying amplitudes. Signal Process. 2018, 147, 1–10. [Google Scholar] [CrossRef]
- Jiang, J.; Wu, Z.; Lu, J.; Huang, M.; Xiao, Z. Interpretable features for underwater acoustic target recognition. Measurement 2021, 173, 108586. [Google Scholar] [CrossRef]
- Wu, Y.; Li, X.; Wang, Y. Extraction and classification of acoustic scattering from underwater target based on Wigner-Ville distribution. Appl. Acoust. 2018, 138, 52–59. [Google Scholar] [CrossRef]
- Li, X.; Xia, Z. Research of underwater bottom object and reverberation in feature space. J. Mar. Sci. Appl. 2013, 12, 235–239. [Google Scholar] [CrossRef]
- Muller, M.W.; Allen, I.J.S.; Au, W.W. Time-frequency analysis and modeling of the backscatter of categorized dolphin echolocation clicks for target discrimination. J. Acoust. Soc. Am. 2008, 124, 657–666. [Google Scholar] [CrossRef] [PubMed]
- Yoon, E.; Lee, H.; Park, C.; Lee, Y.D.; Hwang, K.; Kim, D.N. Ex situ target strength of yellow croaker (Larimichthys polyactis) in a seawater tank. Fish. Res. 2023, 260, 106610. [Google Scholar] [CrossRef]
- Henderson, M.J.; Horne, J.K. Comparison of in situ, ex situ, and backscatter model estimates of Pacific hake (Merluccius productus) target strength. Can. J. Fish. Aquat. Sci. 2007, 64, 1781–1794. [Google Scholar] [CrossRef]
- Kang, D.; Cho, S.; Lee, C.; Myoung, J.G.; Na, J. Ex situ target-strength measurements of Japanese anchovy (Engraulis japonicus) in the coastal Northwest Pacific. ICES J. Mar. Sci. 2009, 66, 1219–1224. [Google Scholar] [CrossRef]
- Stanton, T.K.; Chu, D.; Jech, J.M.; Irish, J.D. New broadband methods for resonance classification and high-resolution imagery of fish with swimbladders using a modified commercial broadband echosounder. ICES J. Mar. Sci. 2010, 67, 365–378. [Google Scholar] [CrossRef]
- Tomiyasu, M.; Kao, W.Y.; Abe, K.; Minami, K.; Hirose, T.; Ogawa, M.; Miyashita, K. The relationship between body angle and target strength of ribbonfish (Trichiurus japonicus) displaying a vertical swimming motion. ICES J. Mar. Sci. 2016, 73, 2049–2057. [Google Scholar]
- Christopher, B.; Alex, D.R.; Wilson, C.D. Broadband echosounder measurements of the frequency response of fishes and euphausiids in the Gulf of Alaska. ICES J. Mar. Sci. 2018, 75, 1131–1142. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold Name | Species | Threshold Range | Associated Parameters |
|---|---|---|---|
| PeakAmp | Yellow croaker [27] | −60 dB | TS −56.9~−29.3 dB (120 kHz) |
| Thunnus thynnus [4] | −20 dB | TS −18.1~−11.7 dB (200 kHz) | |
| Merluccius productus [28] | −60 dB | TS −65.1~−23.7dB (120 kHz) | |
| Engraulis japonicus [29] | −60 dB | TS −53.7~−46.7 dB (200 kHz) | |
| PeakVar | \ | 1 × 109 | Instantaneous Frequency f |
| PeakTmin | \ | 0.9 ms | Transmit Signal Pulsewidth T |
| PeakTmax | \ | 1.0 ms | Transmit Signal Pulsewidth T |
| Equipment Name | Model Number | Equipment Performance |
|---|---|---|
| Transducer | SIMRAD ES200-7C | Fe 160–260 kHz, B = 100 kHz |
| Programmable Signal Sources | HITEK HTPX1370A | Maximum output frequency 43 MHz DAC, 16-bit precision |
| Multi-Channel Amplifiers | Krohn-Hite KH7008 | Noise 7 nV/Hz |
| Linear Amplifier | AR 800A3B | Power 800 W |
| Data Acquisition | HITEK HTPX14484 | Maximum sampling frequency 2 MHz ADC, 12-bit precision |
| Signal Processors | NI PXIe-8133 | CPU Core i7-820QM |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Cheng, J.; Li, G.; Tang, T.; Chen, J. Individual Fish Echo Detection Method Based on Peak Delay Estimation and Instantaneous Frequency Characterization. Fishes 2023, 8, 580. https://doi.org/10.3390/fishes8120580
Yang H, Cheng J, Li G, Tang T, Chen J. Individual Fish Echo Detection Method Based on Peak Delay Estimation and Instantaneous Frequency Characterization. Fishes. 2023; 8(12):580. https://doi.org/10.3390/fishes8120580
Chicago/Turabian StyleYang, Hang, Jing Cheng, Guodong Li, Taolin Tang, and Jun Chen. 2023. "Individual Fish Echo Detection Method Based on Peak Delay Estimation and Instantaneous Frequency Characterization" Fishes 8, no. 12: 580. https://doi.org/10.3390/fishes8120580
APA StyleYang, H., Cheng, J., Li, G., Tang, T., & Chen, J. (2023). Individual Fish Echo Detection Method Based on Peak Delay Estimation and Instantaneous Frequency Characterization. Fishes, 8(12), 580. https://doi.org/10.3390/fishes8120580