1. Introduction
The behavior of fishing vessels refers to the movement and action mode of fishing vessels to carry out fishing operations, mainly including their navigation status, movement characteristics, temporal and spatial distribution, etc. The analysis of fishing vessel behavior can reveal the distribution of hot fishing areas and the variation in fishery grounds, as well as an understanding and evaluation of the exploitation of fishery resources. In addition, it is important for fishery managers to monitor the behavior of fishing vessels to prevent illegal fishing and facilitate production safety.
The activities of fishing vessels affect all aspects of the maritime domain, and the monitoring of fishing vessels is an important part of managing fisheries. Monitoring the footprint of fishing vessels has become a necessary means of rationally utilizing marine fishery resources and maintaining a healthy ecological environment. With the rapid advancement in information technology, numerous systems (e.g., AIS, VMS) have been developed to track the real-time position of fishing vessels. As a result, a large quantity of data are becoming available to study the behavior of fishing vessels. To efficiently process and analyze such a high quantity of data, a series of machine learning algorithms have emerged with the advancement of AI. Machine learning [
1] is designed to obtain new experiences and knowledge by learning the intrinsic regularity information in big data, so as to improve the intelligence of the computer and enable it to make decisions independently. As a branch of machine learning, deep learning [
2] is one of the most popular trends in AI research. Specifically, deep learning technology eliminates the complex feature engineering steps in machine learning, speeds up operations and improves prediction accuracy. It can be more easily adapted to applications in different fields, bringing revolutionary progress to computer vision and machine learning.
In order to quickly process massive quantities of data and extract feature information from it, big data technology and AI technology have been closely integrated, and digital fisheries have successfully transformed into smart fisheries. With the continuous optimization of algorithms such as machine learning and deep learning, more accurate and in-depth fishing vessel behavior information can be obtained by collecting, storing, mining and analyzing the big data of fishing vessels through AI technology.
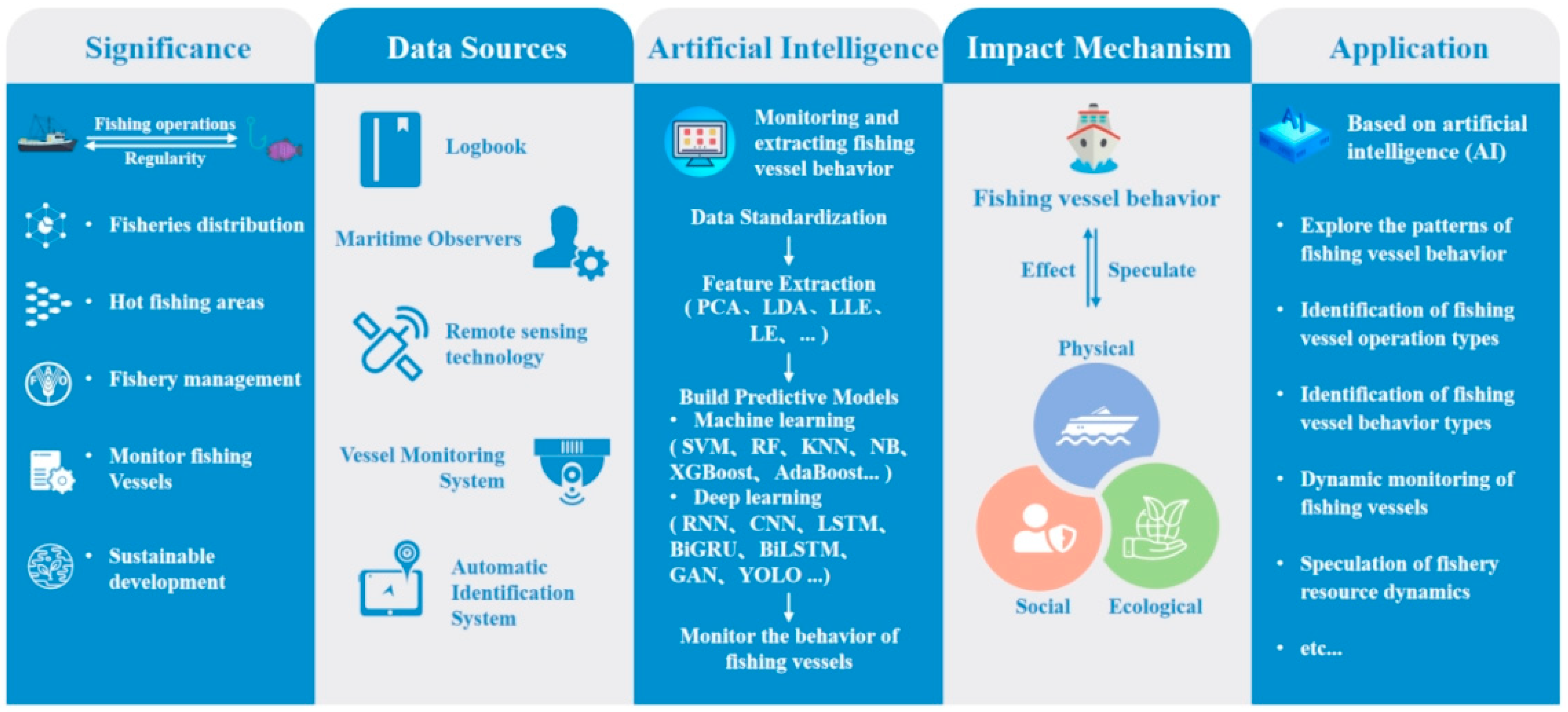
In this paper, we conducted a comprehensive review on fishing vessel behavior in the context of AI. Firstly, the data acquisition methods used to study the behavior of fishing vessels were introduced and compared. Secondly, the AI methods for extracting behavioral information from fishing vessels’ big data were summarized. Thirdly, the mechanisms affecting fishing vessel behavior were explored, covering the intrinsic, ecological and social factors. Lastly, several application scenarios of fishing vessel behavior in fishery management were reviewed. The overall structural framework of this review is shown in
Figure 1.
2. Data Sources of the Fishing Vessel Behavior Research
2.1. Fisheries Logbook
The fishery logbook [
3] is a carrier document that records the main conditions of fishing vessels during navigation and berthing, mainly providing relevant records of fishing activities, including the situation of fishing vessels, navigation conditions and important events that occur during navigation. It should be filled in by the captain or usually by designated personnel and properly maintained. The fishery logbook reflects the actual situation of the vessels’ navigation, is an important basis for analyzing and summarizing navigation experiences, judging and dealing with average accidents, and is most suitable for use with other monitoring methods, such as fishmonger reporting and electronic monitoring, to improve the accuracy of data.
The cost of fishery logbooks is relatively low, and the electronic version can greatly reduce the data turnover time and recording errors, which can improve the convenience of fishermen. However, the validity and reliability of the data obtained by the fishery logbook as a tool for collecting vessel data usually depend on the situation of the fishing ground and the ability of the recorder to complete the logbook. As a result, the obtained data of fishing vessels may be incomplete and inaccurate.
2.2. Fisheries Observers
Maritime observers [
4] are officials formally authorized by the competent government authorities to monitor fishing activities on their own ocean-going fishing vessels or on vessels of other countries in defined operating areas. According to the nature of the work, it can be divided into scientific observers and law enforcement observers. Scientific observers mainly collect data on the catch, biological data and production statistics on fishing vessels, record data such as vessel location, fishing activities and catch estimates, collect biological samples and information, understand the actual fishing conditions, and provide a basis for resource assessment, improvement of management and conservation measures. In order to implement the provisions of their conservation and management measures, enforcement observers conduct inspections of operating fishing vessels to determine whether they are complying with fishing regulations, including the extent of the operating area, the specifications of fishing gear, the allowable and bycatch targets, catch quotas, species and quantities discarded.
Maritime observers are one of the most effective ways to independently and systematically collect accurate catch and effort data. Ensuring the level of monitoring coverage of observers allows for an accurate accounting of the total catch in an area. However, the maritime observer program is one of the most logistically and costly complex monitoring tools. While managers can determine the level of marine observer coverage for fisheries and each vessel, the functionality of the data collected for fishery management will depend on the level of coverage chosen by managers. In addition, the fishing vessel operator may change their fishing behavior because the maritime observer is on board. The relatively high cost of maritime observers often leads to managers being unable to implement full coverage or high-level sampling, and therefore the data obtained cannot be highly trusted.
2.3. Vessel Monitoring System
A vessel monitoring system (VMS) is a specialized system established by international fishery organizations or nations to monitor fishing activities by fishing vessels in areas under their jurisdiction [
5]. It is mainly divided into three parts, namely, a transmitter installed on board, a satellite transmission system and a ground receiver. VMS provides independent and accurate fishing vessel information, reporting the position, speed, heading and date of fishing vessels in real time, which can effectively implement fishing vessel monitoring, and can also be used as a law enforcement tool to monitor the intrusion of fishing vessels in prohibited fishing areas, so as to solve the increasing number of illegal, unreported and unregulated (IUU) issues.
With the rapid development of marine informatization, VMS has gradually become an effective means of fishing intensity supervision. Although VMS does not directly provide specific information on vessel operating status, vessel type, catch, discard, effort or gear, it is able to obtain vessel trajectory data on a regular basis. The use of trajectory data combined with fishery data to mine the fishing behavior of fishing vessels can not only analyze the fishing effort, fishing behavior and fishing intensity assessment, but also study the dynamic changes in fisheries [
6], the development of fishery resources and the impact of fishing vessel behavior on the marine ecological environment [
7], which is of great significance for ensuring the safety of maritime traffic, combating illegal fishing activities and realizing the sustainable development of marine resources.
2.4. Automatic Identification System
An automatic identification system (AIS) is a new type of navigational assistance telecommunications system for identification, positioning and collision avoidance between ships [
8]. It allows offshore equipment to send and receive real-time fishing vessel information [
9] and is an effective means of obtaining traffic information without radar detection. Land-based and satellite-based AIS receivers can typically generate large amounts of AIS data, covering the identification number, position, speed and heading information of ships [
10]. The exchange of this information can lead to early collision detection [
11], especially in waters with poor visibility and night navigation, which can effectively reduce ship collisions and greatly improve the overall maritime safety.
Due to the short time interval between sending and receiving information by AIS, the obtained AIS data have the characteristics of big data, that is, large data volume, multiple data types, and low numerical density. Therefore, it is crucial to analyze and use AIS data to discover the valuable information hidden in fishing vessel operations. Recently, with the wide application of AIS systems, the continuous development of communication technology and the improvement in AIS data processing methods, AIS data have become an important part of marine big data, which has attracted extensive attention from academia in related fields at home and abroad [
12], and has been increasingly applied to the study of fishing vessel behavior. In particular, with the help of AI algorithms to analyze and mine AIS data, a series of achievements have been made in the fields of maritime traffic safety, fishing vessel positioning, fishing ground research, fishing vessel classification, fishing behavior identification and detection of ship anomalies [
13]. It can be said that the emergence of AIS has ushered in the digital era of marine governance, port and shipping operations and management [
14].
With the continuous development of remote sensing technology and geographic information technology, the acquisition of fishing vessel behavior data is more accurate and comprehensive. Although the data obtained by each method are not absolutely accurate and comprehensive, the data are sufficient to provide researchers with a basis for research on fishing vessel behavior. This paper summarizes and compares the advantages and disadvantages of the above methods for obtaining fishing vessel behavior data, as shown in
Table 1.
3. AI Methods for Monitoring and Extracting Fishing Vessel Behavior from Big Data
3.1. Data Standardization
Since the VMS or AIS data received by the satellite may have problems such as data error and loss caused by satellite signal transmission and human factors, the data are not conducive to the analysis in practical applications [
15,
16]. Thus, data preprocessing with the help of big data technology is needed to solve these negative effects, so as to provide reliable data sources for subsequent research on fishing vessel behavior.
For the original fishing vessel data obtained, the invalid and abnormal data should be deleted first. Invalid data generally refer to duplicate and incomplete data, and abnormal data refer to data outside the threshold range, for example, the speed of all types of fishing vessels is usually 0–20 knots, and speed data outside this range are considered an outlier [
17]. Due to the different dimensions and orders of magnitude of the obtained fishing vessel data, if the original index values are directly analyzed, the role of the index with higher value in the comprehensive analysis will be highlighted, and the role of the index with a lower value will be relatively weakened. So, it is necessary to standardize the original data to ensure the reliability of the extracted fishing vessel behavior information. Data normalization [
18] removes the unit limitation of data and converts them into pure values without dimensions, which facilitating the simultaneous analysis of fishing vessel data of different units or magnitudes. Common data normalization methods include min–max normalization (min-max), zero-mean normalization (z-score), log function normalization, etc.
3.2. Feature Extraction
The purpose of feature extraction of fishing vessel data is to screen out better fishing vessel behavior characteristics and obtain better training data. To achieve the best performance of a predictive model, it is important not only to choose the best algorithm, but also to obtain as much information as possible from the original data. Feature engineering is the step of extracting more information from the data that is useful for the prediction results [
19]. It can be said that data and features determine the upper limit of machine learning, and models and algorithms only approximate this upper limit. Feature extraction is a key part of mining fishing vessel behavior information, and machine learning algorithms can better analyze fishing vessel behavior. The feature extraction methods based on machine learning mainly include clustering, dimensionality reduction and feature importance analysis.
The clustering algorithm [
20] is the a priori step to explore the behavior of fishing vessels. Classification of fishing vessel behavior can help summarize the commonalities and rules, discover the particularities and differences and explore the potential scientific theories. The clustering algorithms mainly include hierarchical clustering, K-means, density-based spatial clustering of applications with noise (DBSCAN), etc.
Furthermore, the data of fishing vessels obtained by VMS or AIS are often extensive and complex, which increases the difficulty and computational overhead to search for fishing vessel behavior patterns. Therefore, it is necessary to extract the essential structure of the data by the dimensionality reduction method [
21] to reduce the error caused by redundant information and noise. Dimensionality reduction algorithms mainly include principal component analysis (PCA), linear discriminant analysis (LDA), t-distributed stochastic neighbor embedding (t-SNE), etc.
When applying fishing vessel behavior for prediction, the feature importance analysis can be performed to further explore the influence of different data features on the prediction model. Knowing the importance of features in fishing vessel data for predictions allows the constructed model to be more interpretable and provides a deeper understanding of fishing vessel behavior. Feature importance analysis methods include logistic regression (LR), random forest (RF), extreme gradient boosting (XGBoost), etc.
3.3. Dynamic Monitoring of Fishing Vessels
With the increase in maritime activities and the frequent activities of fishing vessels, the large-scale information on fishing vessel activities puts forward higher requirements for maritime surveillance systems [
22]. Real-time and accurate fishing vessel monitoring systems help to improve the turnover efficiency of port management fishing vessels, helping maritime traffic monitoring, fishery management, and environmental protection [
23]. In addition, fishing is one of the most dangerous industrial sectors in which a number of accidents occur with a high probability [
24]. Dynamic monitoring of fishing vessel behavior can better ensure the safety of fishing vessels and reduce response times for rescue at sea. Although the existing traditional ship monitoring systems are equipped with intelligent AIS, VMS, global positioning systems (GPS) and other radio communication equipment, they lack real-time analysis and processing of data, cannot cope with the situation of multiple vessels entering and leaving the port at the same time, cannot provide efficient monitoring, early warning and management of “three-no fishing vessels”, and their limitations make IUU behavior evade detection [
25]. Therefore, it is necessary to improve the dynamic monitoring of fishing vessels at sea with the help of advanced AI technology.
Using digital image processing and video image analysis, it automatically detects the moving target in the video scene, warns of abnormal situations, and can guide and plan corresponding disposal actions. In recent years, deep learning has become popular in image recognition and object detection [
26]. Since the limited improvement in fishing vessel detection from the perspective of image analysis, models with higher prediction accuracy can be established with the help of deep learning algorithms.
As the most classic deep learning algorithm, the neural network model was first applied to fishing vessel monitoring. For instance, Tang et al. [
27] devised a method based on a deep neural network (DNN), which can quickly extract candidate ships using compressed domains. Results with shorter detection times and higher detection accuracy were obtained by utilizing an extreme learning machine (ELM) for efficient feature pooling and decision-making. Hwang et al. [
28] proposed an effective method to detect target vessels from SAR images using artificial neural networks (ANNs). This method used ANN to generate a vessel probability map, which can detect vessels by using thresholds. Kim et al. [
29] built a deep learning-based ship detection and classification system, which used the faster region-based convolutional neural network (Faster R-CNN) to detect ships in each image and determine the class of ships through Bayesian fusion.
On the basis of neural networks, the You Only Look Once (YOLO) algorithm was proposed and continuously improved. It combines image recognition and target location, and is widely used in fishing vessel monitoring because of its simple structure and high accuracy. For example, Chang et al. [
30] proposed a YOLOv2-based deep learning framework to detect ships from synthetic aperture radar (SAR) images. A new architecture with fewer layers, called the YOLOv2-reduction, has been developed, which has improved the accuracy of ship inspections and significantly reduced calculation time. Later, Liu et al. [
31] designed a vessel detection algorithm based on YOLO V5. It combined the feature extraction process with the ghost bottleneck algorithm to refine and capture the image features, which further improves the detection accuracy. Furthermore, Zhou et al. [
32] proposed a modified ship target detection method of YOLOv5, which improved the traditional convolution operation and coordinated attention mechanism by mixed convolutional kernels (MixConv), and used focus loss and complete intersection over union (CIoU) loss to optimize the loss function of the original method, so as to improve the accuracy and efficiency of ship detection.
The dynamic monitoring of fishing vessels from big data can not only promote the development of fisheries from a scientific perspective, but also have significant practical significance for fishing vessel management, production safety, ecological protection, and implementation of international compliance.
3.4. Identifying Behavioral Characteristics of Fishing Vessels
Fishing vessel behavior identification is to judge fishing and non-fishing behavior characteristics of fishing vessels through big data, with the main purpose of comprehensively and objectively monitoring the operation process of fishing vessels. At present, AIS [
33,
34] and VMS [
35,
36] have been increasingly applied to the field of fishing vessel monitoring and fishing vessel behavior recognition, and the research content is becoming more and more in-depth and extensive.
Many scholars have studied the fishing behavior through the fishing vessel operation data of VMS system, and achieved good results. For example, Gao et al. [
37] proposed a feature fusion recognition algorithm to transform the fishing vessel operation type identification problem into a multi-classification problem based on feature fusion. By extracting the feature information of VMS data, the feature fusion space of the target task was constructed, and the fishing vessel operation-type recognition model was established. The results showed that the accuracy of fishing vessel operation-type recognition after feature fusion was significantly improved. Feng et al. [
38] used VMS data and back propagation (BP) neural networks to identify the fishing behavior of fishing vessels. The change trend in the direction angle and speed of the fishing vessels were selected as the input parameters of the BP neural network model, and the fishing behavior was effectively identified. Vermard et al. [
39] proposed a Bayesian hierarchical model based on hidden Markov processes to predict fishing vessel states. The relative importance of each behavior state in the fishing process was quantified by using the speed and transfer of the fishing vessels as the parameters of the movement process, and the fishing, sailing and docking behaviors of the fishing vessels were inferred.
VMS usually records the information of ships every one or two hours [
40], with a large time interval, in which there may be missing data and other information. The emergence of AIS has greatly improved the resolution, which can broadcast information such as the position and speed of a vessel at intervals of minutes or even a minute, providing real-time information about the vessel more accurately. Therefore, many studies have used AIS data to identify the operational status of fishing vessels with the help of AI algorithms. For instance, Zhang et al. [
41] identified and analyzed fishing vessel behavior by relying on characteristic information such as vessel speed, sailing time, fishing vessel trajectory and fishing effort. According to the behavior of vessels, the location of fish stocks could be directly determined, and the fishing output and resource spatial distribution were statistically analyzed. Natale et al. [
42] proposed a method for identifying fishing behavior of fishing vessels based on a Gaussian hybrid model for the speed distribution characteristics in AIS data, and determined the speed distribution thresholds corresponding to different behavior stages of fishing vessels. Next, they divided the trajectory into three categories of behavior comprising navigation, fishing and anchoring through the threshold, so as to distinguish the fishing and non-fishing behavior states in the fishing vessel trajectory.
By identifying the fishing status of fishing vessels, the monitoring and management of fishing vessels can be strengthened to ensure the healthy and sustainable development of the fishery economy. At the same time, studying behavior patterns of fishing vessels can enable relevant departments to capture information such as the distribution of hot fishing areas and the evolution of fishing grounds, so as to formulate reasonable fishery planning of great significance to fishermen and countries.
4. Mechanisms Affecting Fishing Vessel Behavior
In order to understand and explore fishing vessel behavior more comprehensively, it is necessary to fully explore its influencing factors. A full understanding of the activities of users of fishery resources and the mechanisms influencing their behavior can provide scientific explanations for changes in fishing effort and intensity, thereby contributing to fishery development and vessel management. Understanding the influence mechanisms helps in understanding the emergence and changes in fishing vessel behavior, so that changes in the influence mechanism can predict the response behavior of fishing vessels. Therefore, the exploration of the influence mechanism of fishing vessel behavior is also one of the important contents for successfully managing fishery. The factors affecting fishing vessel behavior are complex and diverse. This paper comprehensively and synthetically explored the influence of fishing vessel characteristics, fishing gear differences, the ecological environment, social system and customs on fishing vessel behavior.
4.1. The Intrinsic Mechanisms
4.1.1. Types of Fishing Vessels
Due to the different functional requirements and the target species of fish caught, operating waters and characteristics of fishing vessels are different. Additionally, differences in the individual performance of fishing vessels, such as size, materials and sailing speed, will also affect their navigation range and speed to some extent. According to the length of the vessel or the power of the main engine, fishing vessels can generally be divided into small, medium and large fishing vessels. The functional tasks of fishing vessels can be mainly divided into fishing vessels and fishery auxiliary vessels. Among them, fishing vessels can be divided into marine fishing vessels and inland fishing vessels in terms of different operating waters. Marine fishing vessels are commonly used to catch aquatic flora and fauna, which need higher seaworthiness requirements and sufficient fuel tanks on board to increase the fishing time at sea. Large marine fishing vessels have higher speeds, larger main engine power, and are also equipped with propulsion devices suitable for fishing operations. Fishery auxiliary vessel is a general term for vessels that are not directly engaged in fishery production, such as fish processing, transportation, replenishment of fishing materials, resource investigation, fishery law enforcement and maritime rescue. They generally need to ensure good stability, seakeeping, maneuverability, and necessary equipment according to functional requirements, including refrigerated tanks, motor boats, marine life sampling equipment, environmental observation equipment and others.
In general, in order to meet the needs of the operation, there are differences in the attributes of the fishing vessels themselves. The larger the size, the harder the material, the greater the draft and displacement, means that the fishing vessels’ ability to resist extreme weather is stronger; however, it requires not only higher stability, endurance and self-sustaining power, but also larger economic expenditure, which is more suitable for farther ocean operations. Conversely, the smaller size of fishing vessels is less resilient to extreme weather, but the economic and operational expenditure is less and suitable for offshore or inland operations.
4.1.2. Types of Fishing Gear
In addition to the different attributes, fishing vessels with different types of fishing gear have different operating waters, speeds, time and trajectories. Taking Chinese fishing boats as an example, under normal meteorological conditions, gillnetters generally operate in shallow water and need to wait on the surface of the water during operation, so the speed of the vessels will be close to 0 during operation, and the maximum can reach 2 knots. Trawlers generally operate in offshore deep-water areas or open water, the speed of double trawlers is 3–4 knots, and single trawlers is generally operating at speeds of 4–6 knots. Purse seiners generally operate in shallow offshore waters, which have faster speed to chase over fish, the free speed is probably 11–12 knots, and the speed during the operation is 2–3 knots.
Because of the different operational methods of different types of fishing vessels, there are also differences in the operating waters, latitude, longitude and headings. For example, trawlers have a wide range of operations, with large latitude and longitude spans, and their operating trajectories are mostly linear and ring-shaped. Drift gillnetters’ nets are lined up in the bow direction and will drift with the net downwind during operation, so the heading direction will be disorderly, the trajectory points at a certain position will be very dense, and the trajectory will be mostly point-shaped. Purse seiners encircle schools of fish through nets when operating, so their trajectory will produce a distinct circular shape. Therefore, the type of operation of the fishing vessels is also one of the important factors affecting the behavior of the fishing vessels.
4.2. The Ecological Mechanisms
4.2.1. Fish Behavior and Marine Environment
Fish foraging, defending, attacking, migrating or swarming induce changes in the trajectory of fishing vessels. For fishing vessels, the operating time will gradually vary according to the living habits of the fishing target, sometimes the net is released before sunset and raised at sunrise, sometimes they continue day and night, and sometimes they only fish during the day. Due to the different distribution ranges and migration patterns of different species, the trajectory and operation mode of fishing vessels will also be different in order to catch fish with different targets.
The natural environment will vary depending on the area in which fishing vessels operate and the target species to be caught. The choice of fishing location by fishing vessels may be influenced by gradients of marine attributes, such as waves, temperature, salinity and pollution, and other marine ecological factors. Changes in the marine environment affect a range of fish behavior and distribution, with unavoidable impacts on fishing vessels. For example, ocean temperature can positively affect the metabolic rate of fish, which in turn affects growth and reproduction [
43], and may favor or limit the growth of specific species. In addition, eddies also play a key role in marine ecosystems. Research progress on pelagic predators have shown that the depth and duration of these animals’ mid-deep sea foraging dives are affected by eddies, which are hot spots for marine predators [
44]. Della et al. [
45] observed and collected the distribution of acoustic backscatter in the vortex field in the Northwest Atlantic; they found that anticyclonic vortices affect the distribution of pelagic microparticles, which may have the potential to locally enhance or construct spatial upper and middle communities. In addition, the height of the waves affects the behavior of fishing vessels whether or not they go to sea. For example, a study by Watson et al. [
46] of fleets below 10 m of British sea bass showed that in calm sea conditions (wave height less than 1 m), most fishing vessels would choose to leave port to fish. As the wave height increases, fewer and fewer ships leave the port, and almost none at wave heights above 3 m. Therefore, the level of the waves directly affects the decision of whether the fishing vessels operate.
4.2.2. Climatic Change
Climate change is altering the physical and chemical environment of the oceans with massive emissions of greenhouse gases caused by human activities, with a potential impact on ecosystems and fisheries. One of the most important consequences of global warming is the decline in ocean oxygen content. Lack of oxygen in seawater may cause fish death, leading to changes in fish distribution due to migration to avoid hypoxia stress [
47]. Purcell et al. [
48] integrated the geographic distribution of dissolved oxygen in the northwestern Gulf of Mexico to assess the effect of hypoxia on the spatial pattern of shrimp fishing effort. The results suggest that hypoxia changes the spatial dynamics of shrimp fisheries in the Gulf of Mexico, affecting the catch volumes and the economic status of fisheries.
Furthermore, an increase in storms is a climatic stressor affecting marine life and habitats, disrupting fishing activities and even causing more serious disasters, with potentially negative impacts on fishing vessel behavior [
49]. Today, the increased frequency and intensity of storms caused by climate change threatens the well-being of fishermen who depend on fisheries for their livelihoods, reducing fishing opportunities and causing loss of life. Sainsbury et al. [
50] empirically assessed how fishermen from a temperate mixed-species fishery in southwest England weigh risks from harsh environments against expected benefits by using the captain’s statement. From the data collected, it was found that when the harsh environment reaches a fixed threshold, fishermen increasingly hate the deterioration in the conditions, which will influence the captain’s decision to go to sea. Therefore, to better study fishing vessel behavior, it is also necessary to understand the impact of storms on marine ecosystems and the links to direct or indirect social and economic disturbances caused by fisheries to support the assessment of fisheries’ vulnerability and to inform studies of fishing vessel behavior.
4.3. The Social Mechanisms
4.3.1. Social Development and Policy
Although the science supporting vessel management is generally dominated by natural ecology, the social development of different countries affects the fishing behavior of fishing vessels in that country. In order to explore the relationship between the level of national development and fishing patterns of fishing vessels, McCauley et al. [
51] analyzed the industrial fishing patterns of vessels flying the flags of developed and developing countries in the maritime areas under their jurisdiction, revealing the dominance of fishing vessels in developed countries in global fishing. While these publicly accessible vessel data have limitations, they demonstrate the impact of social development on fishing areas and intensity, and draw conclusions that can provide international and national strategic information to ensure that national fishing vessels can operate fairly.
In addition, changes in social policy and the political environment may restrict fishing vessel behavior to some extent. For example, the UK’s exit from the EU is a major governance change that will directly affect fishery access, quota renegotiation and trade [
52], as well as indirectly affect the behavior of fishing vessels to change the waters in which they operate and the intensity of their catches. At present, due to the Blue Growth Plan, the creation of exclusive economic zones and marine protected areas, the operating areas and fishing space of fishing vessels may be reduced [
53]. Marine protected areas have been widely proposed as tools for the management of fishing vessels. Horta et al. [
49] analyzed the mechanisms affecting the spatial and temporal distribution of different types of fleets using data before, during, and after the implementation of the Temperate Atlantic Marine Protected Area Management Plan. Studies have shown that space allocation in fisheries is well-defined, but increases fleet competition in buffer zones. Moreover, different fisheries respond differently to the implementation of conservation measures, and the habitat of the target species is the most important factor influencing the choice of fisheries by the fleet.
4.3.2. The Behavior of Fishermen
The behavior of fishing vessels is related to changes in their fishing capacity and activities, including the intensity of their fishing efforts and the allocation of a range of methods in time and space. These changes stem from the choice of decision-making units, usually referred to as “fishermen”. Hilborn et al. [
47] argued that most fisheries’ problems can be attributed to a lack of insight into fishermen’s behavior rather than a lack of biological knowledge of fishery resources. Recognizing the diversity of fishermen’s behaviors and how fishermen can combine their techniques with fishery distribution and environmental changes helps in learning about the behavioral dynamics of fleets.
However, studying the impact of fishermen’s behavior on fishing vessel behavior requires society to understand the employment relationships of fishermen, as well as their motivations or constraints, which are inseparable from the social factors in which fishermen live, such as national policies, social institutions and customs. Branch et al. [
54] used the Dutch ground-dwelling flounder fishery as an example to explore the social factors influencing fishermen’s behavior, namely employment relationships, work rhythms and diversity of fishermen’s behaviors. Among them, the employment relationship determines the frequency and operation duration of fishing vessels at sea, the work rhythm influenced by social norms leads to differences in the continuous operation time of fishing vessels, and the diversity of fishermen’s behavior affects the choice of fishing grounds and fishing intensity. In order to adapt to changes in the social environment, fishermen will develop new fishing strategies, which will indirectly affect the fishing area, operating time and operation mode of fishing vessels.
5. Application of Artificial Intelligence in the Field of Fishing Vessel Behavior
With the help of AI algorithms to mine and analyze the behavior patterns and characteristics of fishing vessels, it is helpful to understand the utilization of fishery resources and the protection of the fishery ecological environment, further standardize the fishing operation behavior of fishing vessels, improve fishery production efficiency, ensure production safety and realize the sustainable development of marine resources. Methods based on machine learning and deep learning have been widely used to study the behavior of fishing vessels, such as identifying the type of operation of fishing vessels, analyzing fishing operation status, monitoring the dynamics of fishing vessels, assessing fishing effort and avoiding marine traffic accidents.
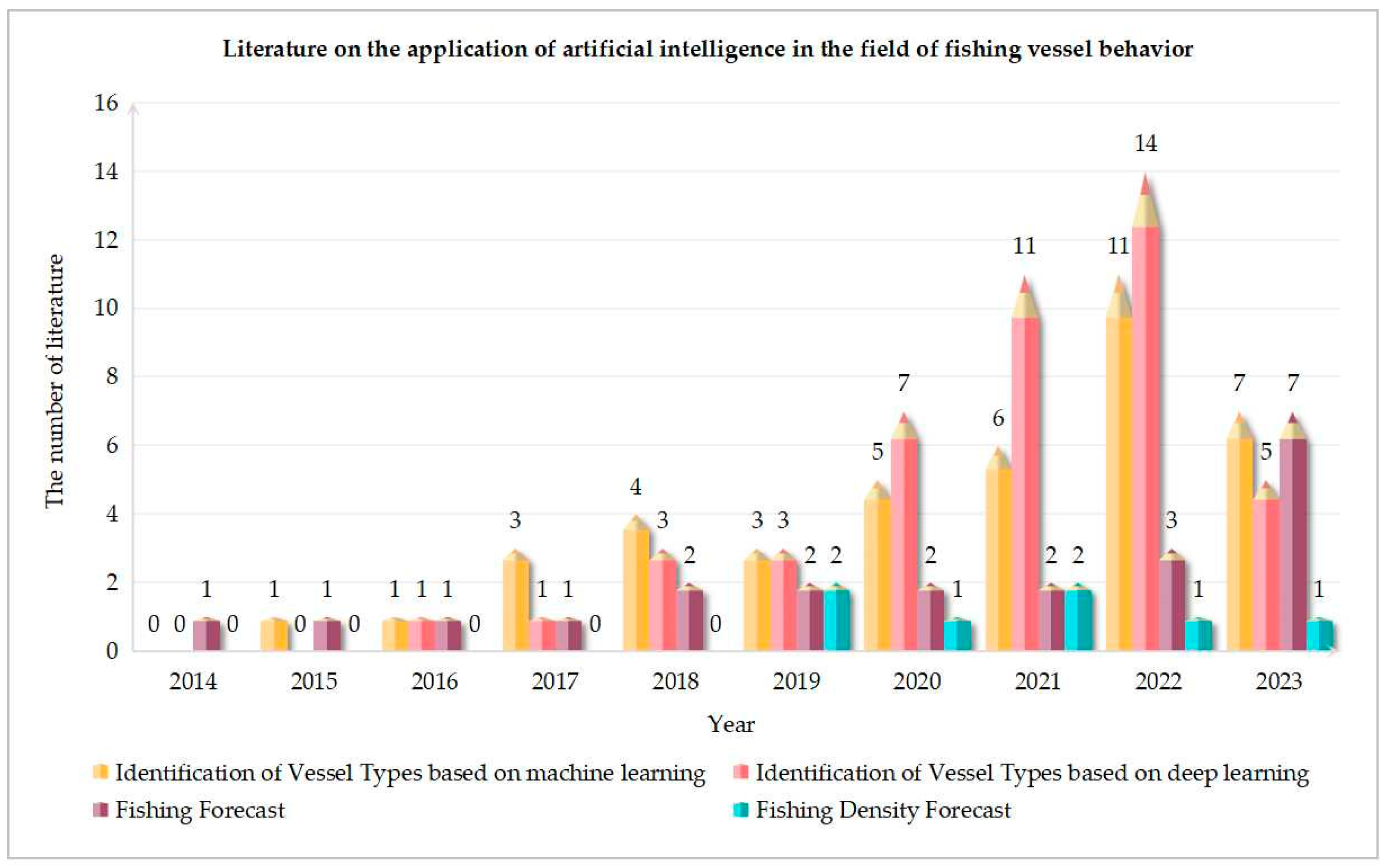
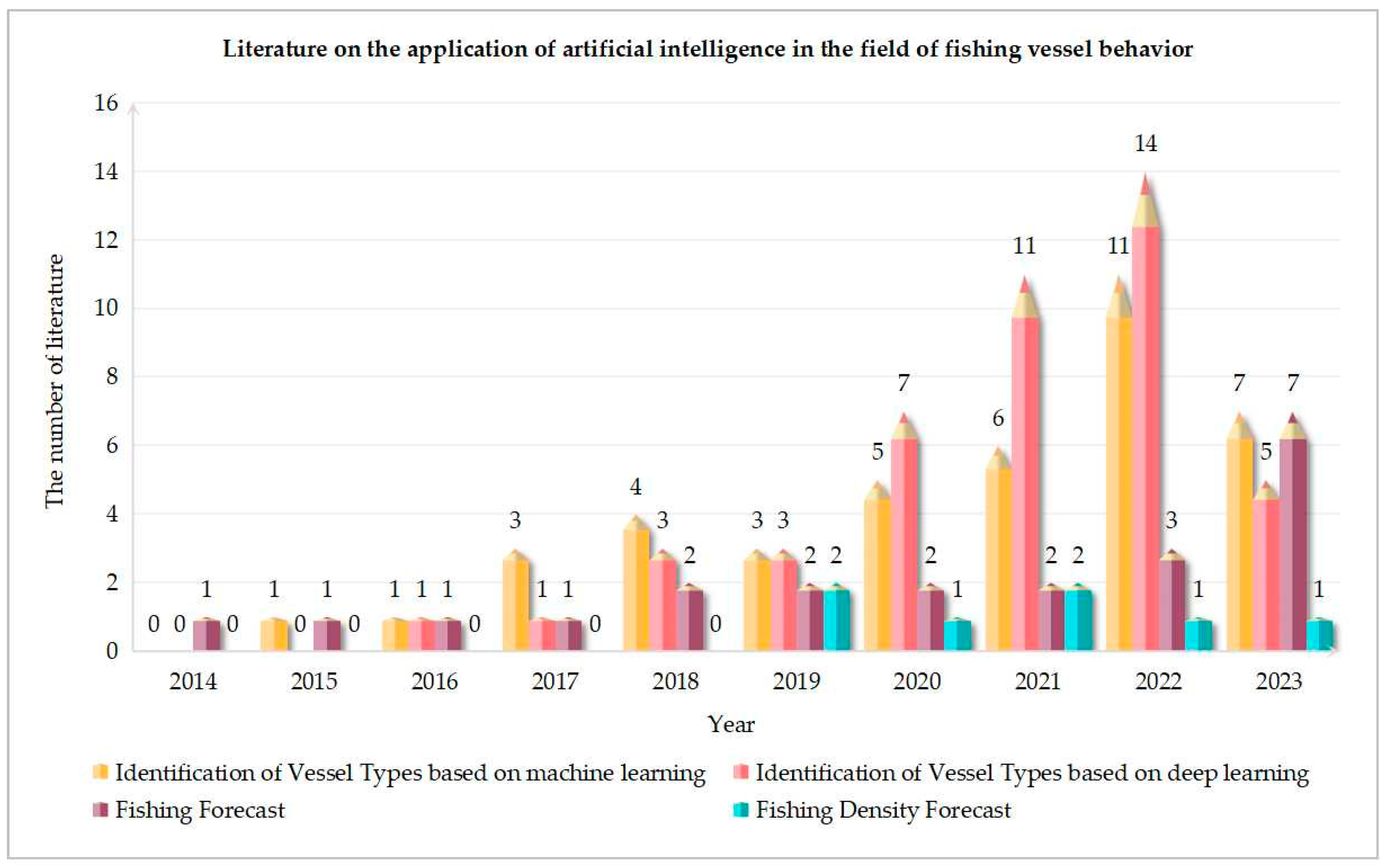
This paper used the Web of Science resource library to search for four applications, namely vessel type identification based on machine learning, vessel type identification based on deep learning, fishing forecasts and fishing density forecasts. The literature covered the period from 2014 to 2023, and the search topics of the four applications include: “ship/vessel type identification/classification” and “machine learning”; “ship/vessel type identification/classification and “deep learning”; “fishing forecasting/fishing ground forecasting” and “machine learning/deep learning”; “fishing vessel density/fishing effort” and “machine learning/deep learning”. By reading the title and abstract of each article, the number of studies in four applications over the past decade was obtained after manually eliminating papers that did not belong to the field of fishing vessel behavior with AI methods, as shown in
Figure 2.
Due to the late application of AI in fisheries, and that the study of fishing vessel behavior is an emerging field in fishery research, the number of existing studies in the literature is small and concentrated in recent years, especially after 2020. Among them, there are 41 articles on vessel type identification based on machine learning, 45 articles on vessel type identification based on deep learning, 22 studies on fishing forecasts, and 7 pieces of research on fishing density forecasts. As can be seen from
Figure 2, AI methods have been applied more and more in the study of fishing vessel behavior, and there is a trend of continuous increase. This shows that AI methods can effectively help research in the field of fisheries, and there is a lot of room for improvement. The application of AI in the field of fishing vessel behavior is detailed as follows.
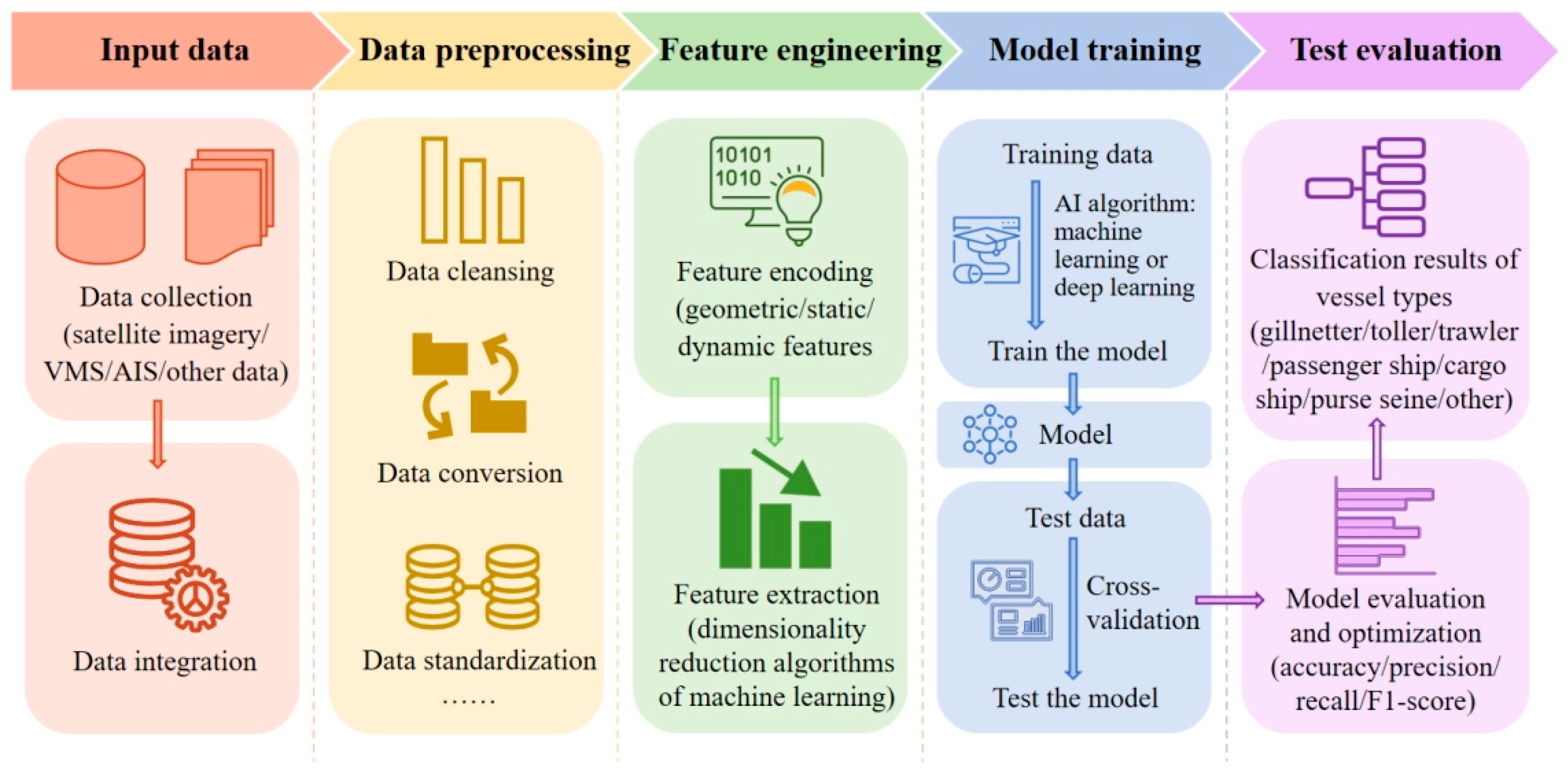
5.1. Identification of Vessel Types
Effective fishery management is essential for achieving sustainable development of the oceans [
55], because different types of fishing vessel have different impacts on marine living resources and the marine environment, so, the task of classifying types of vessel operations is becoming increasingly important. Recently, many scholars have studied different classification methods of fishing vessel operation types [
56,
57,
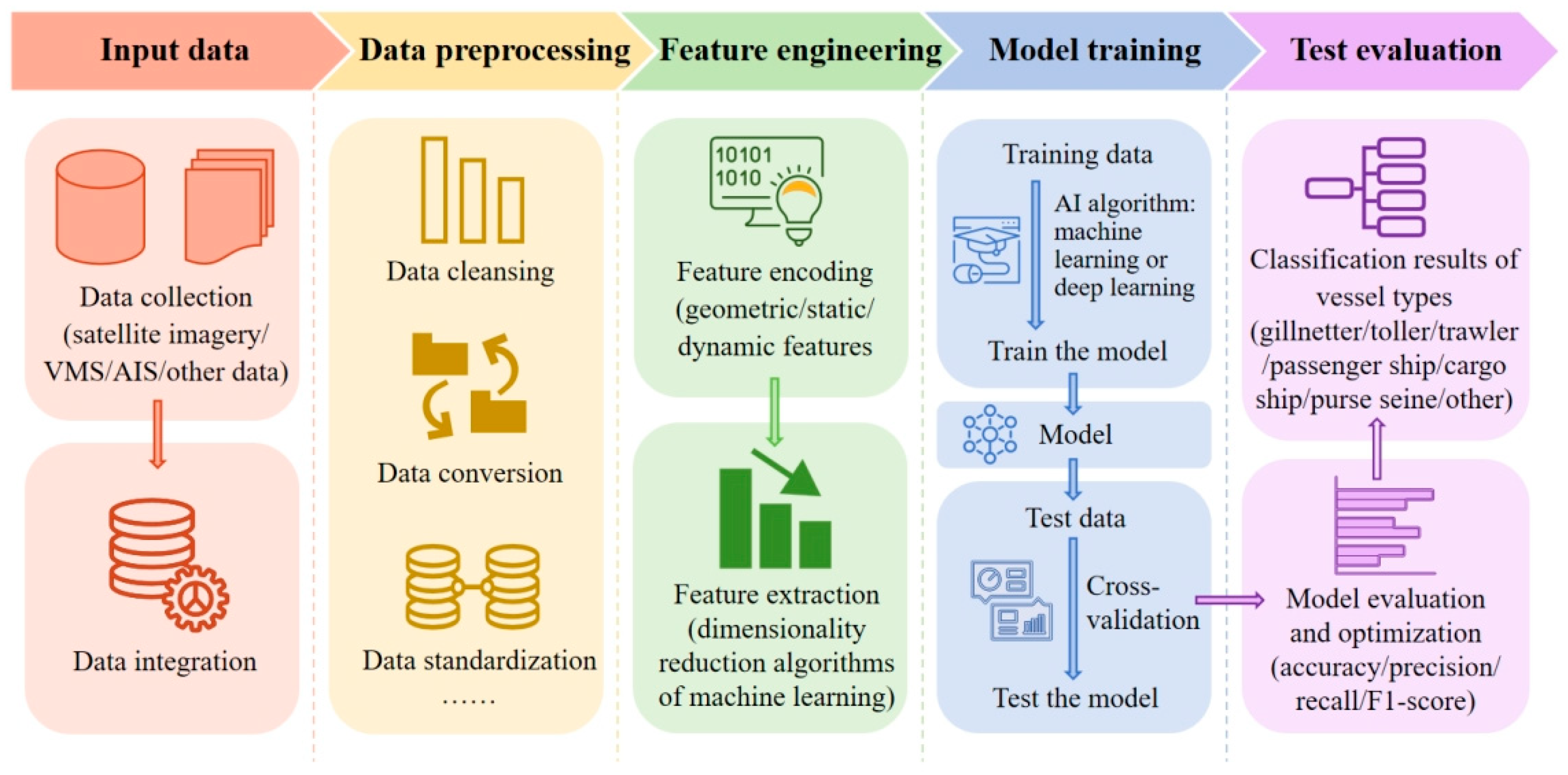
58]. With the advent of the era of big data, a variety of powerful machine learning and deep learning algorithms have emerged, and are increasingly applied to the identification of fishing vessel operation types. The process of fishing vessel behavior-type identification based on an AI algorithm is shown in
Figure 3.
5.1.1. Research Based on Machine Learning
Based on AIS trajectory data, Sheng et al. [
59] proposed three basic motion modes according to ship navigation characteristics. A logistic regression (LR) classification model was constructed to identify fishing vessels and cargo ships by using the features extracted from ship trajectories combined with the relevant sub-trajectory division algorithm. However, it is not possible to identify the trajectory of a specific type of fishing vessel. Zhou et al. [
60] developed a novel method for classifying ships in ports based on behavioral clustering. This method summarized the classification characteristics by clustering the behavior of ships in the port area, and classified ships into different behavior clusters. The research has shown that the length and width of ships can be used as explanatory variables for ship classification. Huang et al. [
61] fully considered the registration information of fishing vessels, took the feature engineering of XGBoost and machine learning scheme as key modules, and used VMS data to divide nine different fishing vessel operation types. By calculating and comparing the fishing density distribution of unregistered fishing vessels before and after application, the importance of unregistered fishing vessel’s type identification is confirmed. But the classification accuracy can be further improved. Guan et al. [
62] analyzed the spatio-temporal distribution and activity patterns of fishing vessels in different seasons, and extracted 60 features including speed, heading and position change. The light gradient boosting machine (LightGBM) method was used to establish a classifier for three types of fishing vessels, which significantly improved the identification effect of fishing vessel types. Yan et al. [
63] used AIS data to build a machine learning-based ship classification and anomaly detection method. According to the characteristics of different types of ships, the extraction of ship behavior features except traditional geometric features was introduced, and the effectiveness and feasibility of the proposed method were proved.
The research on the identification of fishing vessel operation types based on machine learning provides the value of decision-making assistance for fishery resources development and marine safety management, and lays a foundation for further research on applications such as camouflage vessel identification, behavior pattern mining, outlier behavior detection and other applications.
5.1.2. Research Based on Deep Learning
Nowadays, the extensive research of deep learning has greatly promoted the development of AI and machine learning. Deep learning has achieved great success in many fields such as natural language processing (NLP) and computer vision, which has made breakthroughs in many technical tasks. Due to the rapid development of deep learning and the continuous birth of new learning techniques, some studies have applied it to solve the type identification problem of ships. For example, Nguyen et al. [
64] converted latitude and longitude coordinates into heat vectors to represent the geometric patterns of ships, and developed a multi-task deep learning framework based on recurrent neural networks (RNNs) algorithms to solve the ship-type classification problem. Duan et al. [
65] proposed a semi-supervised deep learning method based on AIS historical data for the first time. The kinematic and static information of the vessels was fed into a convolutional neural network (CNN) to obtain the feature representations. Then, the variational auto-encoder was used for semi-supervised learning to simultaneously perform discriminant learning and generative learning, so that the model can make full use of unlabeled data for vessel classification. In addition, hybrid ensemble algorithms of machine learning and deep learning have been widely used in the fishery field and have achieved higher performance than traditional methods. Murray et al. [
66] designed an RNN deep learning framework to process AIS sequence data and used the clustering algorithm of machine learning to predict regional ship behavior. However, it has regional limitations. Wang et al. [
67] built a multi-feature ensemble learning classification model to classify AIS data of passenger ships, cargo ships, fishing vessels and tankers. Four base classifiers including RF, one-dimensional CNN, bidirectional gated recurrent unit (Bi-GRU), and XGBoost were trained with the extracted static feature samples, dynamic feature distribution samples, time series samples and time series feature samples. Finally, the basic classifier was integrated by another RF algorithm, and the prediction effect is better than that of the base classifier.
Ship-type classification has important applications in ship behavior anomaly detection and maritime artificial supervision. The classification results reveal the patterns and differences in fishing vessel behavior in specific regions, contributing to vessel management, marine safety protection and marine ecological sustainability. By combining advanced intelligence technologies, the distribution patterns of fishing vessel activities can be further explored and guidance can be provided for the development and management of fisheries.
5.2. Speculation of Fishery Resource Dynamics
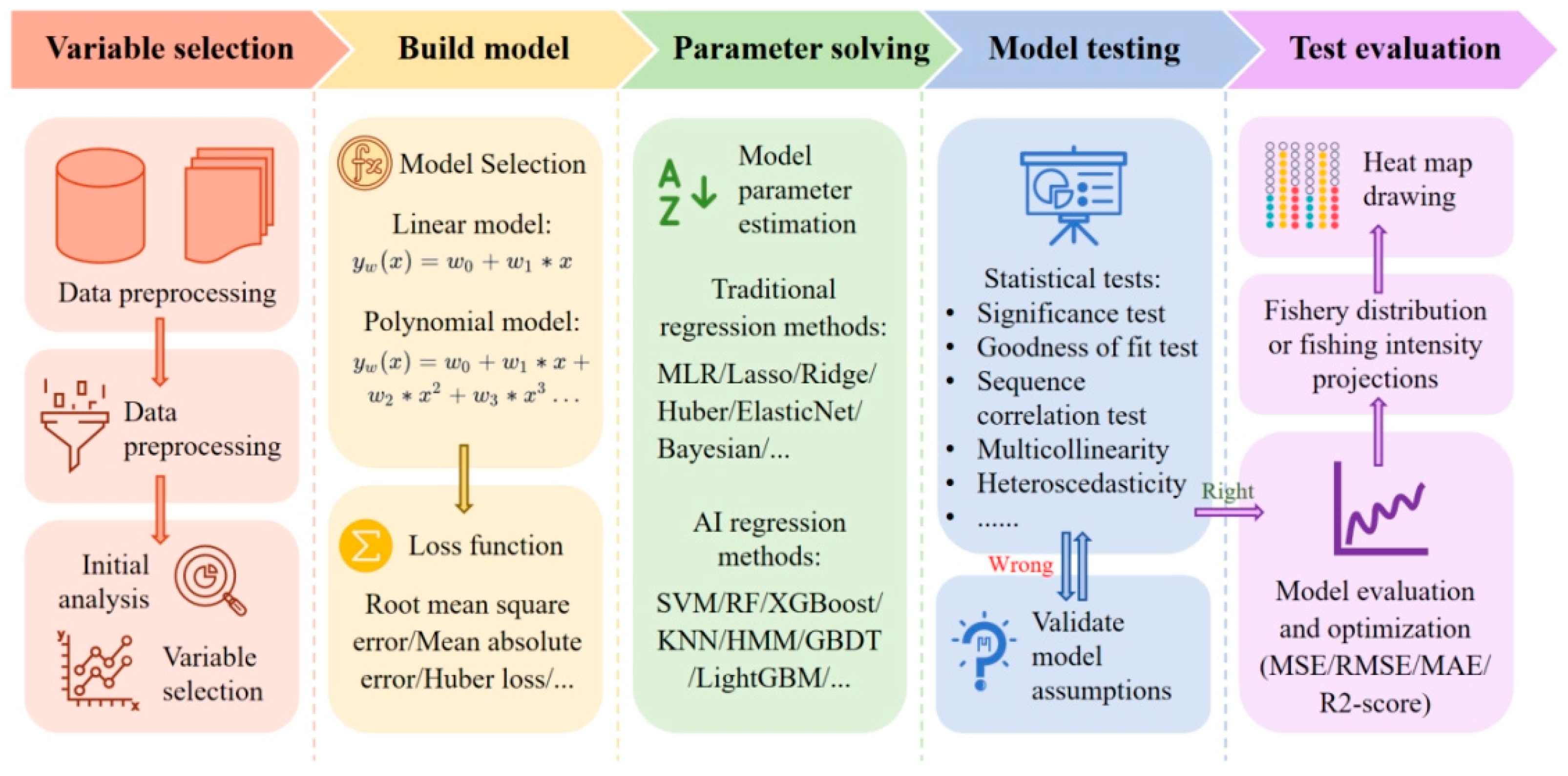
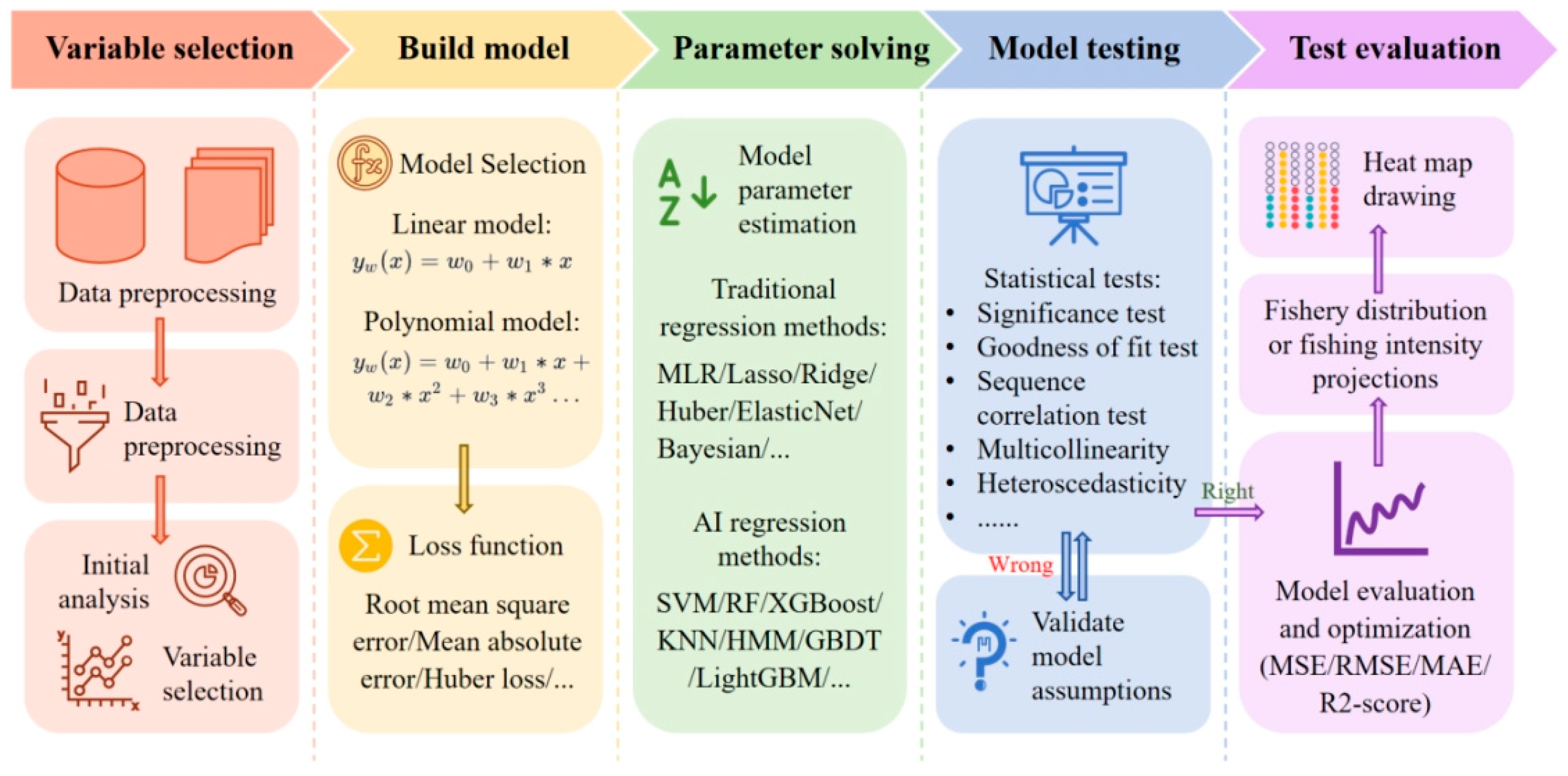
Fishery resources are the natural source and foundation of fishery production. Dynamic projections of fishery resources are required in order to maintain the reproduction capacity of fishery resources and obtain optimal sustainable catches, and to ensure the maximum sustainable use of ecosystems and biological species by humans. Since fishing vessel behavior is affected by the distribution of biological resources, analyzing the fishing activity gathering area and fishing intensity of fishing vessels can not only infer the temporal and spatial distribution of fishery stocks and the dynamic changes of fishery resources such as the fishery environment, but also provide important information support for marine ecological protection and spatial planning management. The dynamic estimation process of fishery resources based on AI is shown in
Figure 4.
5.2.1. Fishing Forecast
The fishing forecast refers to the establishment of corresponding prediction models to judge the future position of future fish stocks and the richness of fish stocks by collecting, collating and analyzing marine environmental data, meteorological data and fish behavior data in a certain area. With information about the future of the fishing situation, managers can develop effective strategies and fishermen can rationalize when and where to catch.
So far, many algorithms of fishing forecast have emerged one after another, which have solved the problem of resource prediction of various fisheries and achieved good prediction results. For example, Le et al. [
68] proposed for the first time to use AIS data to estimate fishing effort, adopted a general method to identify fishing grounds based on vessel speed and position to analyze the temporal and spatial seasonal changes of fishing effort in Brest Bay in France, confirming the feasibility of AIS data to provide spatiotemporal variation information of fishing effort in fishing grounds. Subsequently, Guiet et al. [
69] analyzed the spatial and temporal distribution of global fishing effort through AIS fishing vessel trajectory data from 2015 to 2017. The study showed that socioeconomic factors are the dominant factors in spatial seasonal variations in global fishing effort, but are also correlated with natural seasons. Hsu et al. [
70] used the habitat suitability index (HSI) to identify potential fishing grounds for skipjack tuna in the Western and Central Pacific (WCPO), based on global fishing activity and remote sensing data from 2012 to 2015, and the results showed that the model performed well in fitting daily prediction and actual fishery location data.
With the advent of AI algorithms, intelligent algorithms designed to effectively predict fishing conditions have achieved greater accuracy and used less time. In terms of fishing vessel behavior combined with AI algorithms for fishing situation prediction, Gao et al. [
71] developed a new fishery prediction model based on elevated regression tree (ERT) by using the mackerel fishery data in mainland China from 2003 to 2010 and environmental data such as sea surface temperature (SST), sea surface temperature gradient, sea surface height (SSH) and geostropy velocity (GV). Guan et al. [
72] predicted the distribution of shrimp farms in the East China Sea by studying the trajectories and behavior patterns of shrimp fishing vessels in the fishing trajectory system. At the same time, a set of shrimp farm distribution management system based on the BP algorithm was established, which can monitor the trajectory of fishing vessels and the distribution of shrimp population in real time. Sivasankari et al. [
73] proposed a hybrid prediction architecture for potential fishing zones based on remote sensing images, which integrated deep convolution layer and RNN based on flitter bat-optimized long short-term memory (FB-LSTM). These convolutional layers were used to remove various color features such as chlorophyll, sea surface temperature (SST) and GPS location from satellite images, and FB-LTSM was used to predict potential fishing locations. To identify and predict potential fisheries of
Engraulis ringens, Armas et al. [
74] implemented a neural network-based fishery prediction model, which used sea surface temperature, salinity, mixed layer depth, sea height and ocean current as marine science variables, effectively improving the prediction accuracy.
The fishing forecast plays an important role in fishery production. Reasonable use of fishery data to predict future fishery production can improve the efficiency of fishery production and make greater contribution to the sustainable development of fisheries. With the continuous development of satellite remote sensing technology and AI technology, the fishing forecast will be more accurate and real-time, and the rational planning and management of fishery resources will be further realized.
5.2.2. Fishing Density Forecast
In fishery resource science, fishing intensity is often used to measure the fishing situation of fishery resources. The distribution and changes of fishing activity gathering areas can reveal the temporal and spatial distribution characteristics of fishery resources to a certain extent, which has important guiding significance for the restoration and management of fishery resources.
Existing research has made progress in developing the spatial and temporal distribution of fishing activities by fishing vessels [
75]. With the widespread application of AIS and VMS, the analysis of fishing conditions by studying fishing vessel behavior provides a new perspective for researchers. For instance, Natale et al. [
42] proposed a method to segment the trajectory of fishing behavior by using AIS data from Swedish waters, which were combined with the Gaussian mixture model (GMM). Later, a fishing intensity map was constructed using the fishing operation status trajectory data, and the fishing log was used for verification. Yan et al. [
76] developed a fishing activity analysis method based on AIS data to quantify the fishing footprint in the waters of China’s exclusive economic zone. Through the spatial correlation studies and hot spot analysis of fishing intensity, the spatial and temporal patterns of fishing activities in this area were explored.
In addition, machine learning and deep learning algorithms have demonstrated powerful predictive power in the study of fishing intensity problems. Soykan et al. [
77] used ERT to model the spatial and temporal distribution of fishing efforts for two different fisheries in the North Pacific Ocean, and even relatively short time series fishery data were sufficient to accurately predict the location of future fishing activities at a range of target species, fishing methods and spatial scales. Hong et al. [
78] meshed the study area through the fishing vessel trajectory data provided by VMS, captured the dynamic changes in fishing vessel operation density in time and space, and used the deep residual network to predict future fishing efforts. Using the VMS dataset, Zhao et al. [
79] proposed a CNN-based weekly level prediction system for the distribution of fishing efforts. The system also validated the early birds’ fishing behavior as a predictive indicator of short-term fishing effort distribution. Moreover, Jeon et al. [
80] utilized the method of convolutional networks for biomedical image segmentation (U-Net) to predict fishing density in space and time domains, which identified the fishing status by using vessel position and speed data representing time series, and then generated daily 0.01° gridded fishing density data.
Short-term projections of fishery effort distribution and catch density will dynamically guide fishery management. Speculating on the dynamics of fishery resources by studying the behavior of fishing vessels has become an important means to discover the rules, providing scientific support for the orderly development, rational utilization and scientific management of marine fishery resources, which is of great significance to the sustainable development of marine fishery resources.
6. Conclusions and Discussion
This review first introduced several main methods of monitoring fishing vessel behavior, including logbooks, maritime observers, AIS and VMS, and compared their advantages and disadvantages. Secondly, AI methods for extracting behavioral information from fishing vessel big data were collated. Next, the physical, ecological and social mechanisms influencing fishing vessel behavior were comprehensively analyzed, and existing research on the mechanisms of influence on fishing vessel behavior was briefly introduced. Finally, the application of existing AI technology in the field of fishing vessel behavior is summarized. Judging from the existing literature, AI technology has been widely used in the analysis and research of fishing vessel behavior, and has achieved satisfactory results. Specifically, the identification of fishing vessel’s type and fishing status with the help of AI algorithms can strengthen the abnormal behavior detection and daily monitoring of fishing vessels. Dynamic monitoring of fishing vessels based on deep learning can ensure the safety of fishing vessels and improve the turnover efficiency of managing fishing vessels at the port. In order to make dynamic predictions of fishery resources, AI algorithms can help predict the gathering areas and fishing intensity of fishing vessels more accurately, providing important information support for marine ecological protection and spatial planning management.
In summary, the research on fishing vessel behavior in the context of big data has made a qualitative leap with the help of AI technology. However, achieving sustainable development of marine fishery resources still requires global efforts. The popularization and application of various fishing vessel monitoring systems and the maturity of observation remote sensing technology have realized the efficient acquisition of dynamic position data of ships, and laid a solid data accumulation and technical support. In future work, the acquisition technology of fishing vessel trajectory data can be further improved and optimized. As the volume of data increases, it is necessary to establish a set of standards for processing and analyzing the data. In addition, the use of AI technology combined with the advantages of VMS and AIS can more comprehensively mine and analyze the big data of fishing vessels. Based on prior knowledge, the fishing types and behaviors of fishing vessels can be more accurately identified and studied. The application of data mining-related algorithms will be further explored in the future. The extraction model method and simulation prediction effect of fishing activity agglomeration area will be improved to achieve more accurate dynamic prediction of fishery resources. At the same time, a variety of application scenarios can be developed using research on fishing vessel behavior. Strive to build a smart fishery operation supervision system based on the behavior of fishing vessels, and realize the combination of transparent fishing and smart fisheries as soon as possible.






{kind=link}
{kind=link}
{kind=link}
{kind=link}