1. Introduction
Acoustic telemetry is a widely used method for tracking aquatic animals, particularly fish [
1,
2]. Detection range among transmitters (henceforth tags) and receivers is dependent on the technical characteristics of the equipment and environmental conditions [
3,
4]. Manufacturers of acoustic telemetry equipment can only provide generalized, estimated detection ranges for ‘typical ocean conditions’ because of the variability of equipment and environmental factors inherent within each study. At any site, a general understanding of the expected detection ranges is fundamental for ensuring feasibility (i.e., can a fish be detected effectively), and to determine cost effectiveness (i.e., how many receivers and in what configuration are required to ensure a reasonable detection efficiency). Therefore, site-specific range testing of the equipment in use should be a crucial part of telemetry study design [
3,
4].
Acoustic environments are influenced by water depth and salinity, substrate types, and surface conditions (e.g., wind), as well as anthropogenic influences, such increases in ambient noise near hydropower dams. Detection range is expected to be lower where salinity levels are high due to increased absorption rates of the acoustic signal [
2,
5]. Environments with substantial wave action that causes air entrapment can increase sound absorption and acoustic signal scattering [
3,
5]. Deep waters allow an acoustic signal to travel unimpeded through spherical spreading rather than encountering the surface or bottom, at which point the acoustic signal would spread cylindrically causing it to weaken [
5]. Shallow waters where the acoustic signal reaches the bottom could have vegetation that causes attenuation, or substrate types that could dissipate (soft substrates) or reflect/scatter (hard substrates) the signal [
3,
5]. Anthropogenic activities such as watercraft can also reduce the signal-to-noise ratio.
A specific case in which anthropogenically-caused underwater noise may be increased is around hydropower generating stations. Noise is created by water flow through turbines and spillways, as well as by cavitation [
2,
6]. Acoustic signals can also be distorted and reflected off concrete and rock structures of dams causing multipath signals [
7,
8]. While use of acoustic telemetry to examine fish movements close to hydropower facilities is common [
9,
10], specific studies documenting the effects of these facilities on the acoustic environment and subsequent potential effects on acoustic signal detection are not common, and none were considered in a recent detection range testing literature review [
4].
Beyond the environmental conditions impacting detection ranges, the type of acoustic telemetry equipment used also impacts the reliability of detecting an acoustic signal. The tags and receivers selected for use in a study depends upon species-specific criteria for tag type/size and behavior to be examined, as well as the environment in which the tags and receivers will be deployed [
7]. Low power tags are smaller, have a relatively short battery life, and are commonly used to tag small fish such as juvenile Atlantic salmon (
Salmo salar; smolts), whereas high power tags can accommodate more or larger batteries, and are often used to tag large fish. These tag types differ in size to accommodate their respective acoustic transducers, electronics, and batteries. High power tags output an acoustic signal which propagates farther underwater than low power tags. Passive receivers are typically moored at a fixed location for extended periods of time because they have internal memory that stores telemetry data including tag identification and datetime stamps. Active receivers are mobile and are used for short periods of time to detect tagged individuals as they move along. Active tracking involves the transport of the receiver and associated hydrophone, most typically using a boat, and is therefore used under more benign environmental conditions that allow for safe operation of such equipment. Passive and active receiver types vary in tag detection sensitivities. Active receivers generally have a higher sensitivity than passive receivers, especially when using a directional rather than an omnidirectional hydrophone (Jonathan Mulock, Vemco, personal communication); therefore, active receivers should be able to detect a given tag at a greater distance than passive receivers.
The equipment used in this study were chosen based on the applicability of the range testing results to concurrent studies being conducted on Atlantic salmon within a large hydropower reservoir. Both juvenile (smolts) and adults were detected with acoustic technology provided by Vemco (Amirix, Bedford, NS). We used low power tags for smolts and high power tags for adults. Here, we report on the detection range of low and high power acoustic tags by passive and active receivers at a site close to a hydropower generating station, and a site upstream away from potential generating station noise but still within a large reservoir. It was hypothesized that: (1) detection ranges for both tag and receiver types would approximate the estimated detection ranges provided by the manufacturer; (2) detection ranges would be greater for the active than the passive receiver due to the higher sensitivity of the hydrophone; (3) detection ranges would be greater for the high power than the low power tag; (4) detection ranges would decrease with increasing wind speed (due to wave noise); and (5) the hydropower site would have lower detection ranges in comparison to the reservoir site due to higher background underwater noise levels and/or acoustic scattering off reflective surfaces.
3. Discussion
Range testing within a hydropower reservoir established that detection ranges often differed from manufacturer’s estimates, generally with detection ranges being higher than expected for the passive receiver, and lower than expected for the active receiver. Deviations from expected detection ranges have been observed in other studies. For example, detection ranges of only 88–111 m for the low power tag and 65 m for the high power tag have been documented in oceanic conditions [
2,
6]. Such drastic differences in detection range due to environmental conditions exemplify why site-specific and equipment-specific range testing is critical for successful study design.
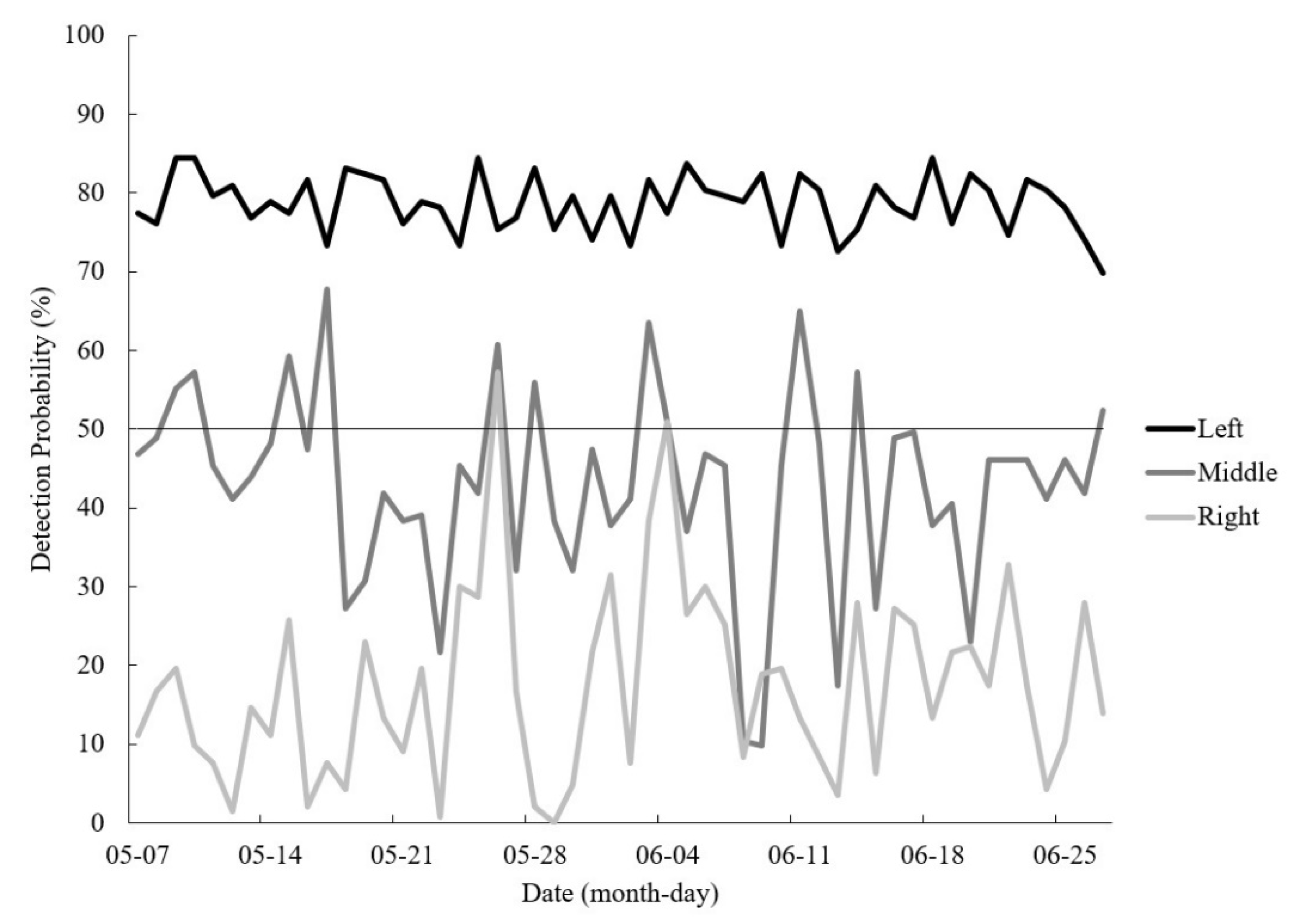
The long-term range test allowed for the quantification of detection range while taking variability of environmental conditions into account. Importantly, this test was performed during the time when tagged Atlantic salmon smolts would be out-migrating. Tagged Atlantic salmon smolts tracked in a concurrent study (transmitting every 30–90 s) took a minimum of 188 s to move through the reliable detection space (212 m) around the receiver line at the hydropower site, and therefore, at least two transmissions were available for detection when receivers were placed using the design in this study, with no undetectable area within a triple receiver line (Babin, University of New Brunswick, unpublished data). The number and placement of receivers at any site must be balanced between effectiveness and cost. Using a 50% threshold for reliable detection allows for optimizing of receiver spacing whereby detection efficiency can be balanced with the number of receivers in the area to minimize financial cost while ensuring reliable data collection.
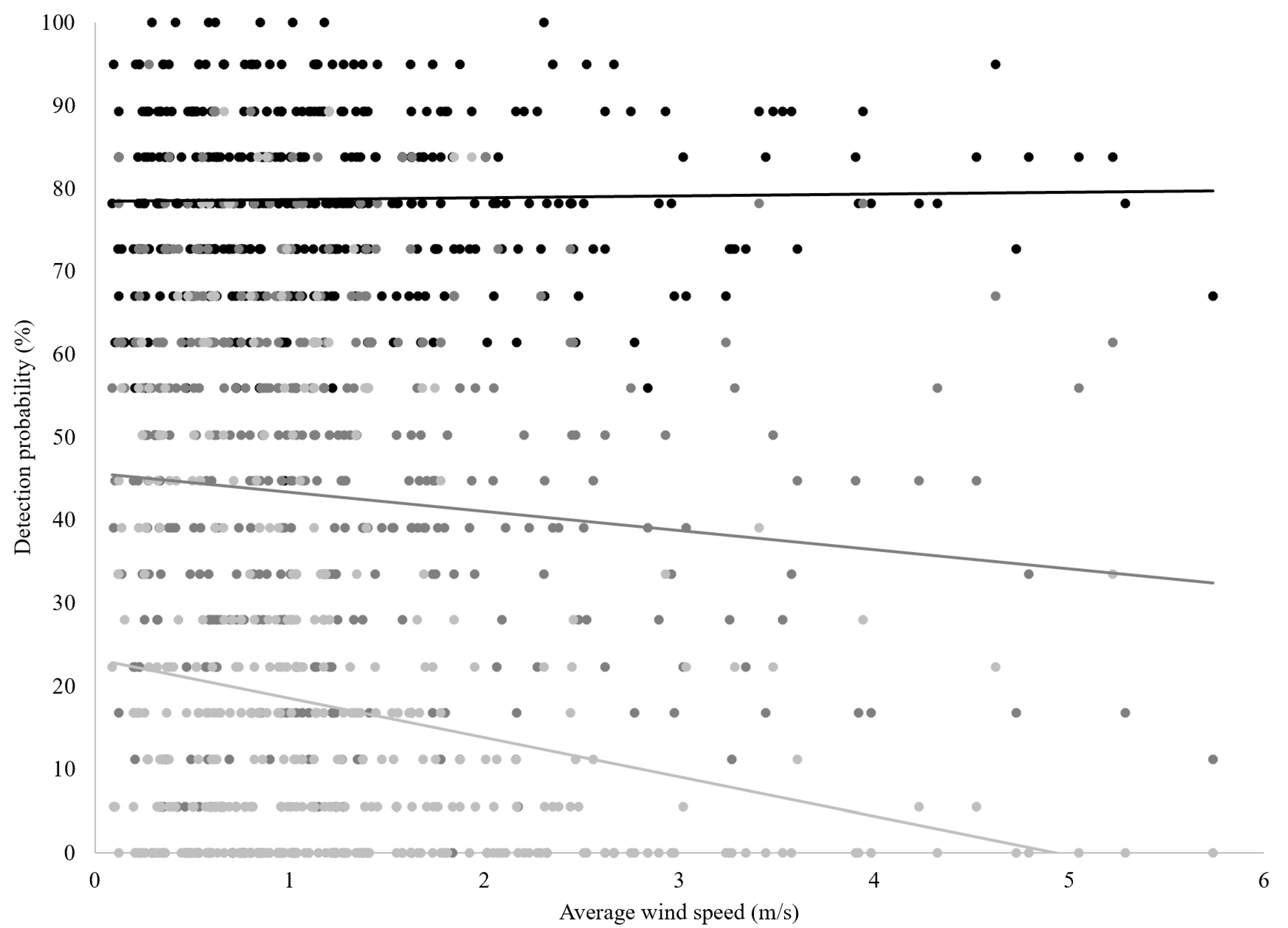
Wind speeds encountered during the range testing trials did not reach those recorded during the longer-term range test (maximum 2.7 versus 6.2 m/s), High wind speeds during the long-term test generally coincided with decreased detection ranges, especially as distance between the tag and the receiver increased, although the relationships were weak. Wind speeds high enough to affect detection reliability would probably not be encountered during active tracking in a small boat since the higher wind speeds would limit safe travel on the water before they would affect detection probabilities.
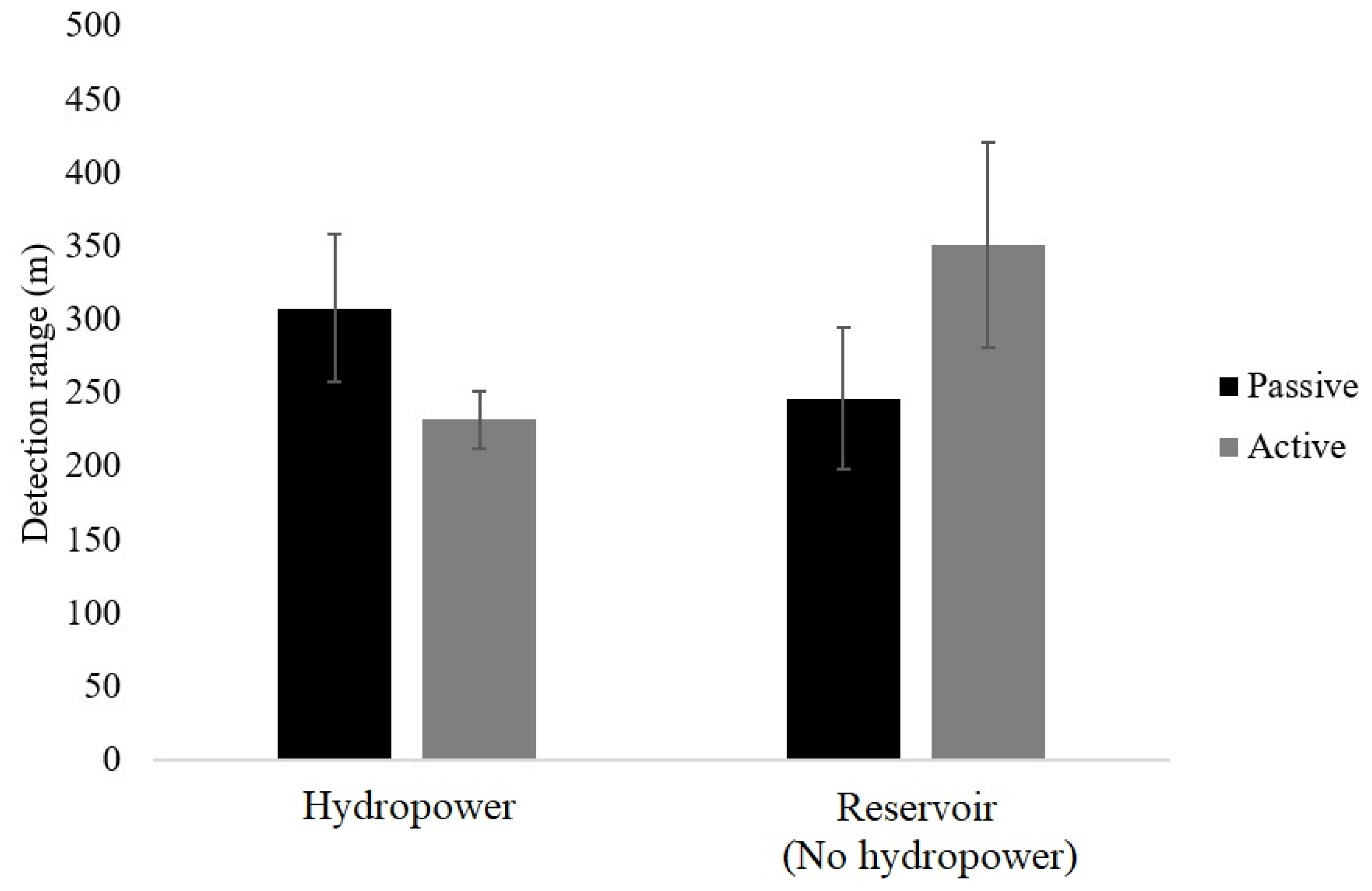
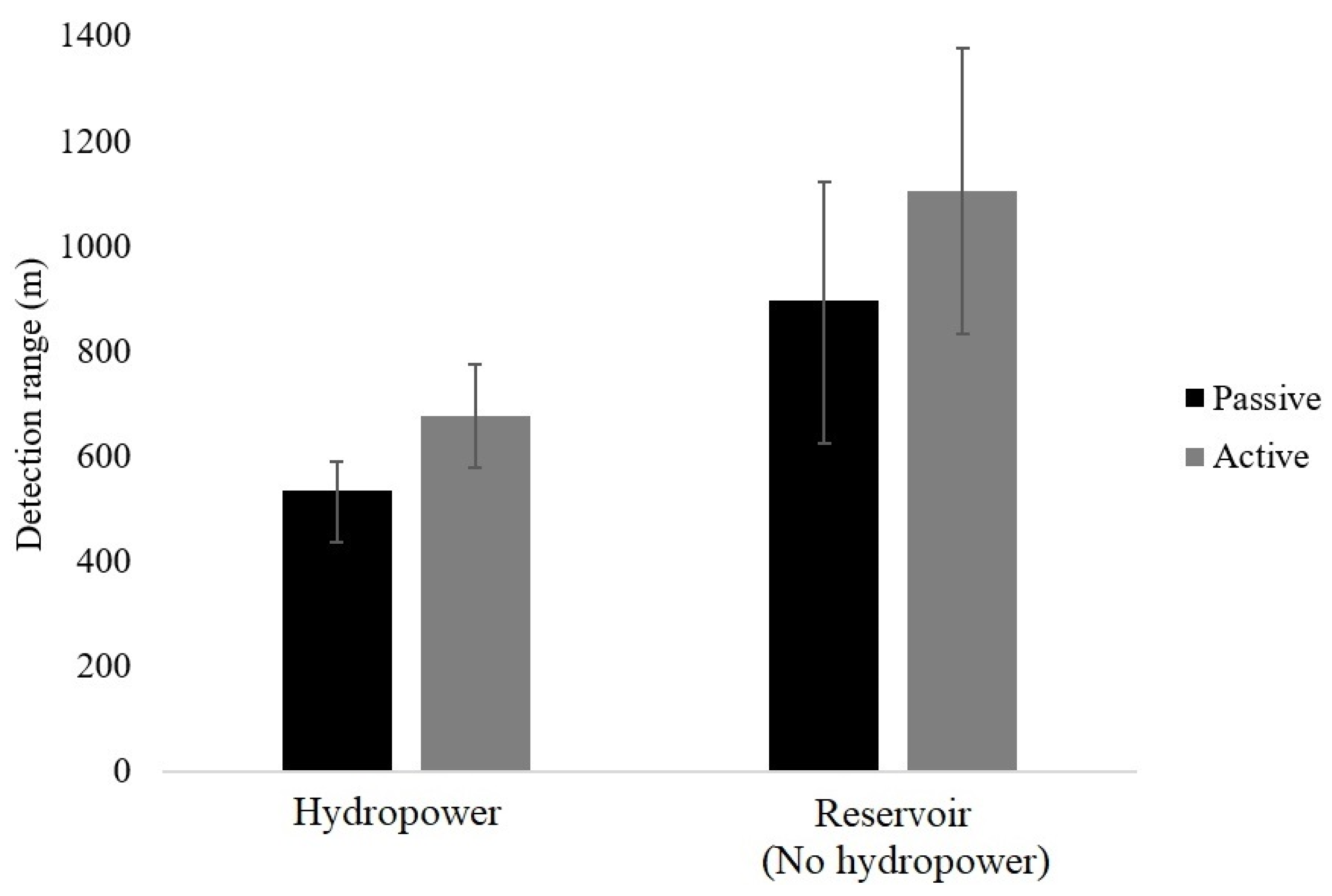
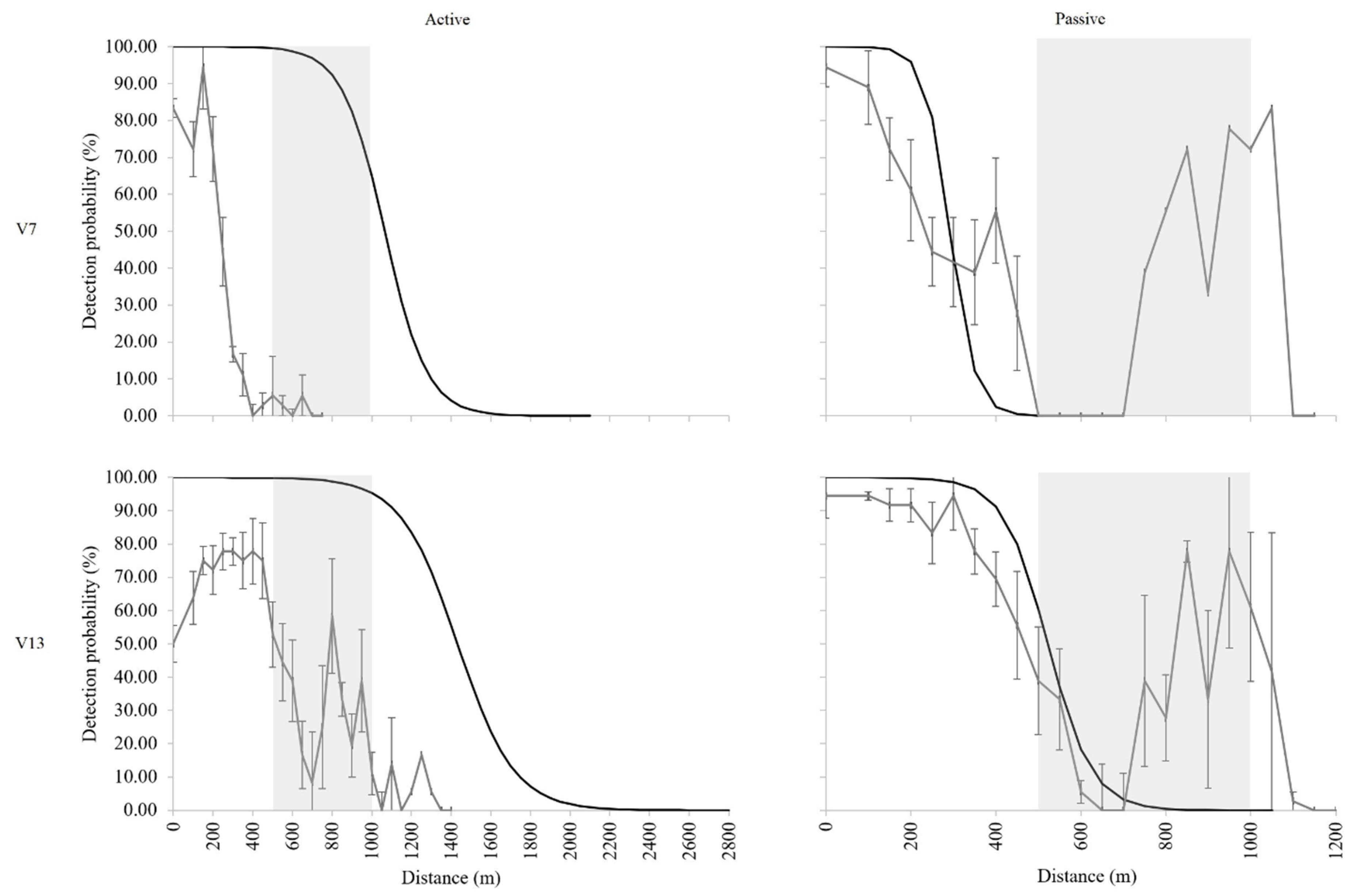
Detection ranges significantly differed between sites for the high power tag only, with ranges being generally lower near the hydropower facility than at the reservoir site. This could be partially attributable to the difference in substrate types, where the soft mud and silt bottom at the hydropower site could have attenuated some of the acoustic signals, whereas the cobble bottom at the reservoir site may have propagated the acoustic signal. Overall, the detection probability patterns in the vicinity of the hydropower generating station indicate that decreased detection probabilities were substantial (8%–95%). Reduced detection probabilities have been attributed to increased ambient noise levels caused by discharge flows and cavitation [
2,
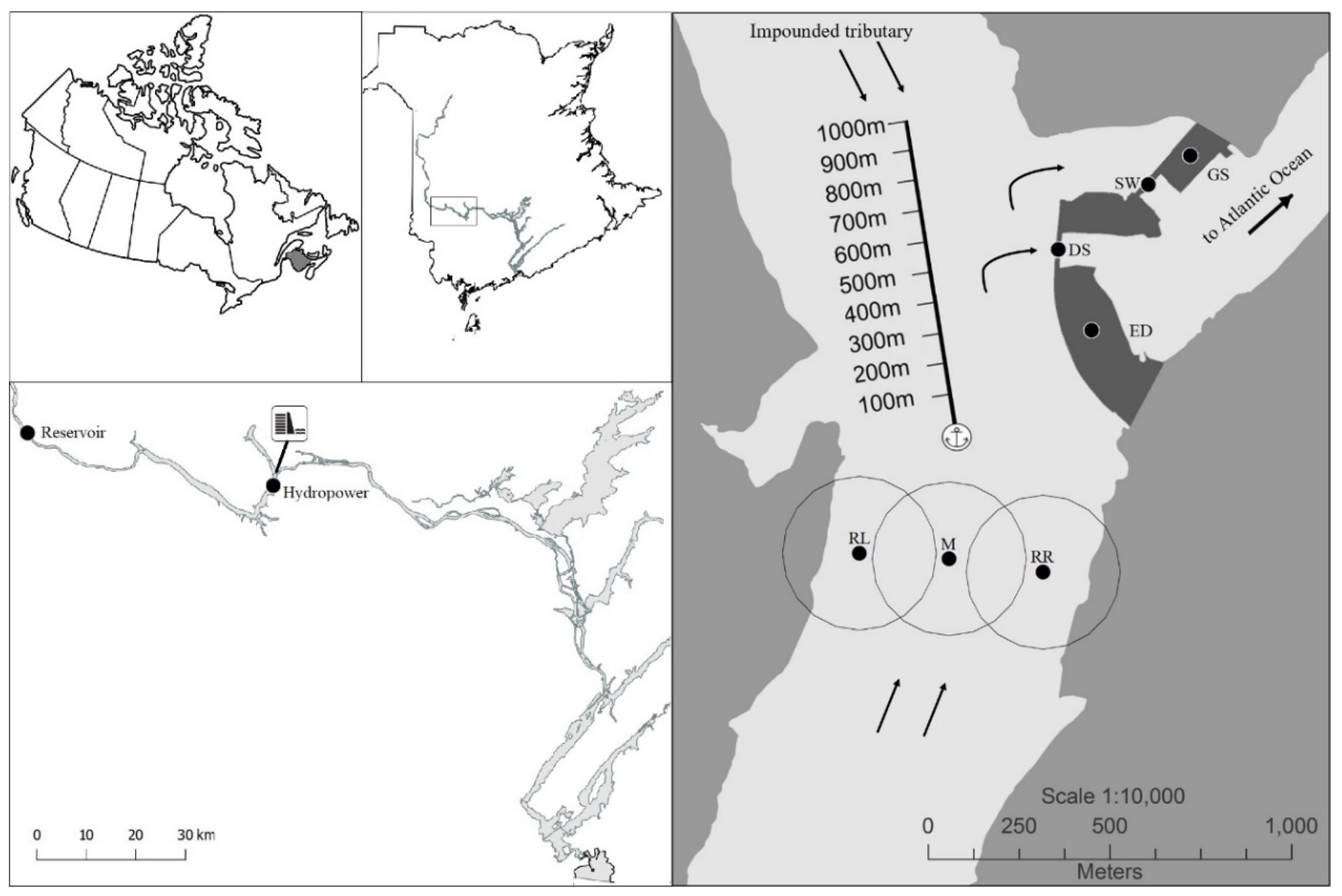
6]. In the case of the current study, the area in which detection probabilities indicated an abrupt decrease was associated with a diversion sluiceway (DS), however, it is important to note that the DS and spillway (SW) gates were closed during the range testing trials. Therefore, the relationship between the reduction in detection probability and association with the DS could be attributable to acoustic scattering off reflective surfaces rather than increases in ambient noise levels. It was similarly surprising that detection probabilities increased after the significant reduction. Particularly for the passive receiver detecting both tag types, the detection probability often exceeded 50% beyond the distance at which zero-detection probability would have been expected. This surprising result may also be attributable to the presence of the hydropower facility allowing the signal to reflect off hard surfaces and to propagate the signal farther than would be expected. Future range testing studies could consider implementing ray tracing to track where and how the sound propagates, although this would be a complex task within moving waters with numerous natural and anthropogenic obstacles [
11]. The patterns of detection probability found in the vicinity of a hydropower generating station lead the authors to recommend that telemetry studies test the detection probabilities under various (hydropower) operating conditions, as well as different environmental conditions and locations, or design their receiver deployments to have greater acoustic space overlap near hydropower dams as a precaution to ensure signals will be reliably detected. It is important to consider the study objectives when assessing optimal receiver locations.
In conclusion, (1) detection ranges were generally lower in both studied sites within the large hydropower reservoir than the expected detection ranges estimated by the manufacturer, especially for the active receiver; (2) detection ranges were generally greater for the active receiver than the passive receiver; (3) detection ranges were greater for the high power tag than the low power tag; (4) detection probabilities were decreased when wind speeds reached 6 m/s, and (5) the hydropower site had generally lower detection ranges in comparison to the reservoir site, with an estimated 8%–95% decrease in detection probability at least partially attributable to the presence of a hydropower facility.
The results of this study will inform the design of telemetry studies performed in hydropower and reservoir settings, although site-specific range testing is recommended. Researchers should carefully consider the conditions of their site, especially in relation to hydropower facilities which could have higher ambient underwater noise and concrete structures causing multipath signals. Range testing should include all tag and receiver types to be used. Additionally, range testing should be conducted in a way that captures variability in environmental conditions as well as during times of the year which are relevant for the species and life-stage which will be detected.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}