
Penalized-Likelihood PET Image Reconstruction Using Similarity-Driven Median Regularization


Abstract
:1. Introduction
2. Methods
2.1. Penalized-Likelihood Approach to PET Reconstruction
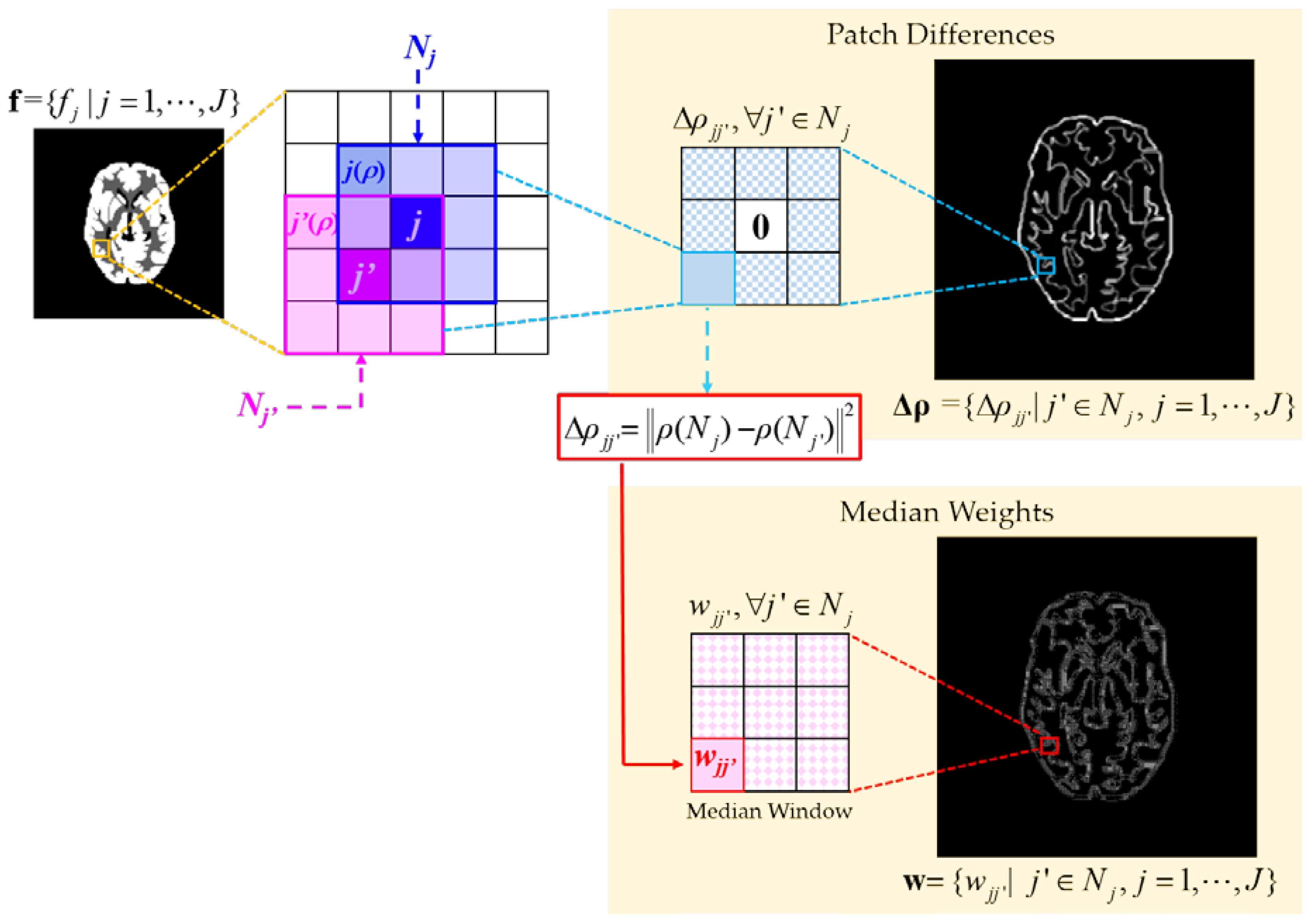
2.2. Similarity-Driven Median Regularization
2.3. Optimization of PL-SDMR Algorithm
| Algorithm 1: The outline of the PL-SDMR algorithm. |
| Initialize and |
| for each iteration n = 1,…,N |
| for each subset l = 1,…,L |
| Update using (12), |
| end |
| for each sub-iteration q = 1,…,Q |
| Update using (18), |
| end |
| end |
3. Results
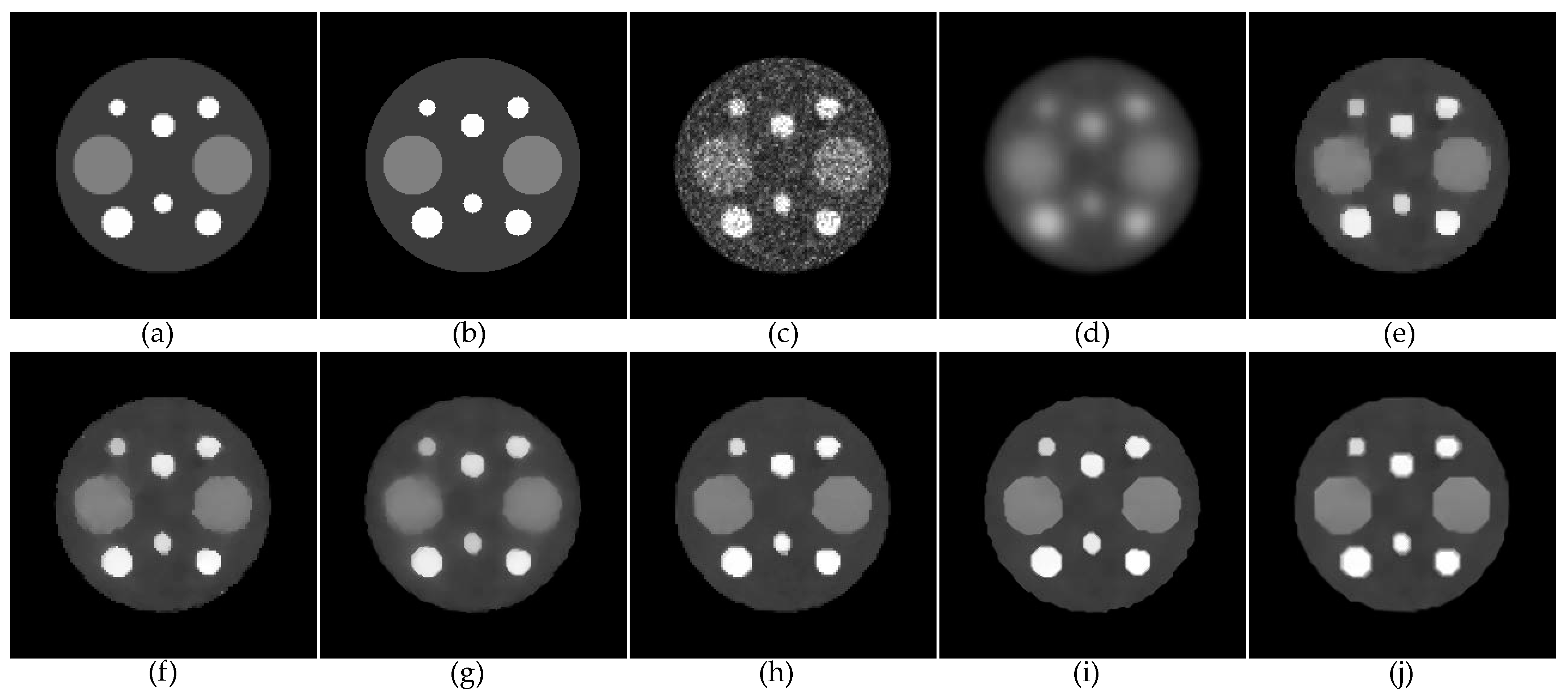
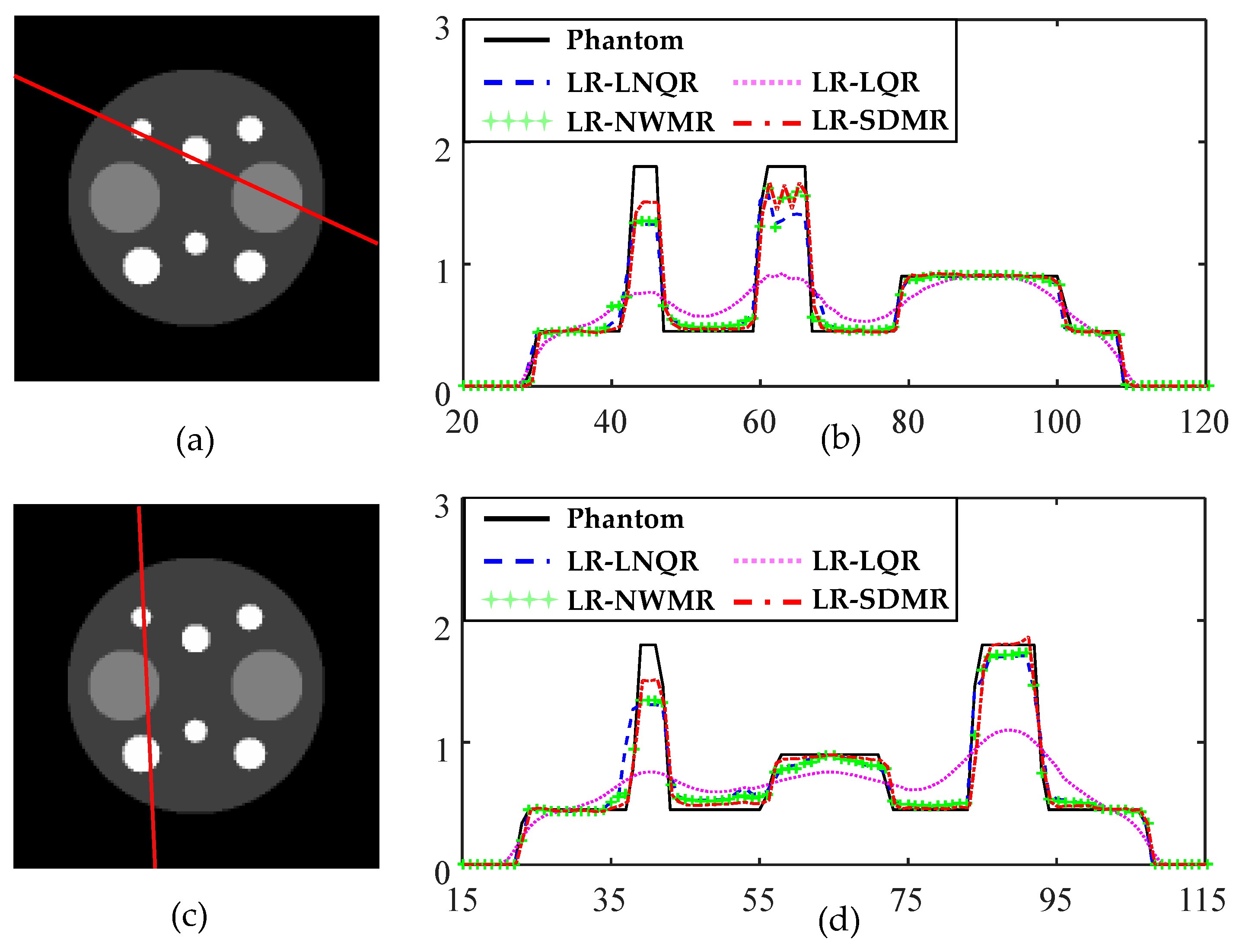
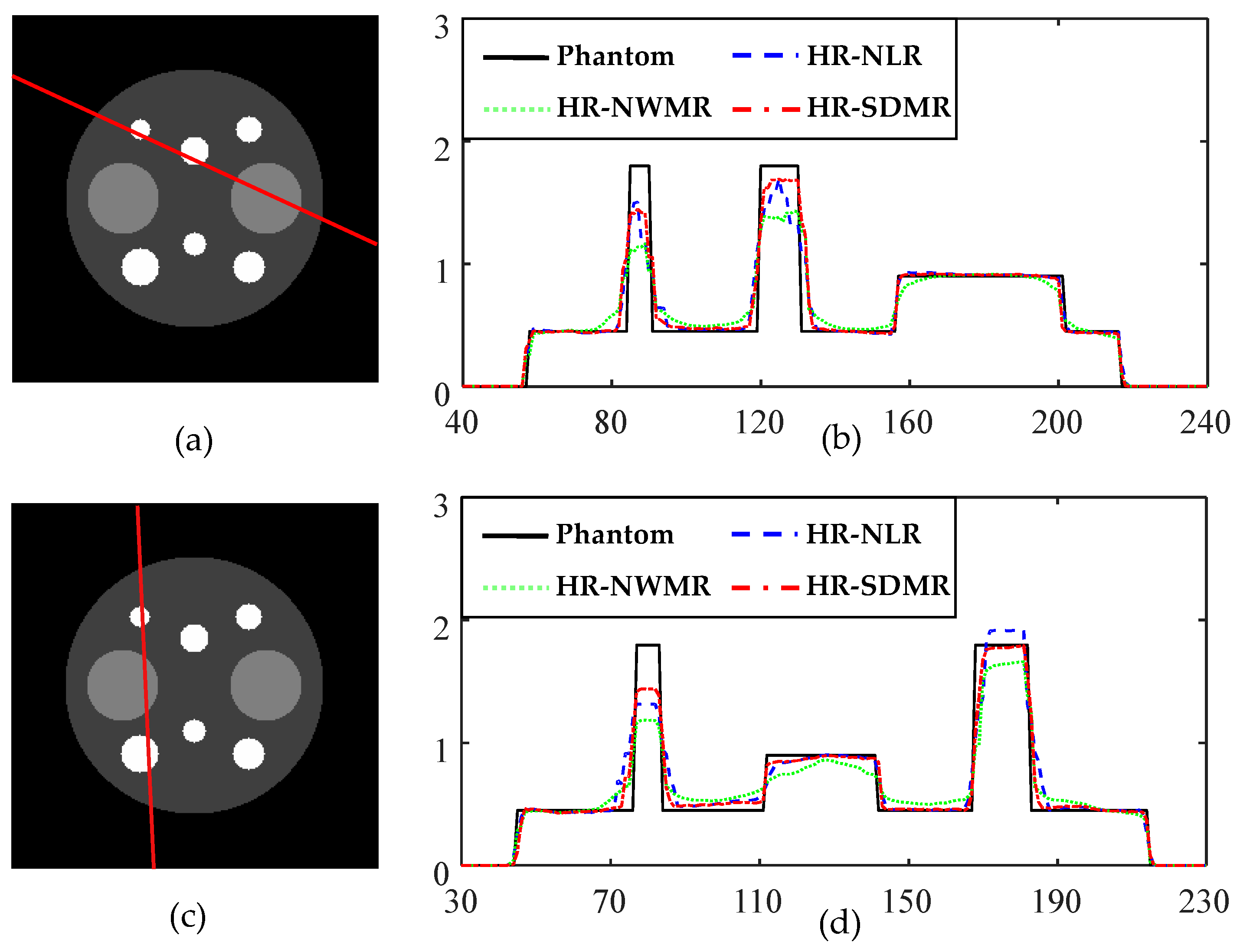
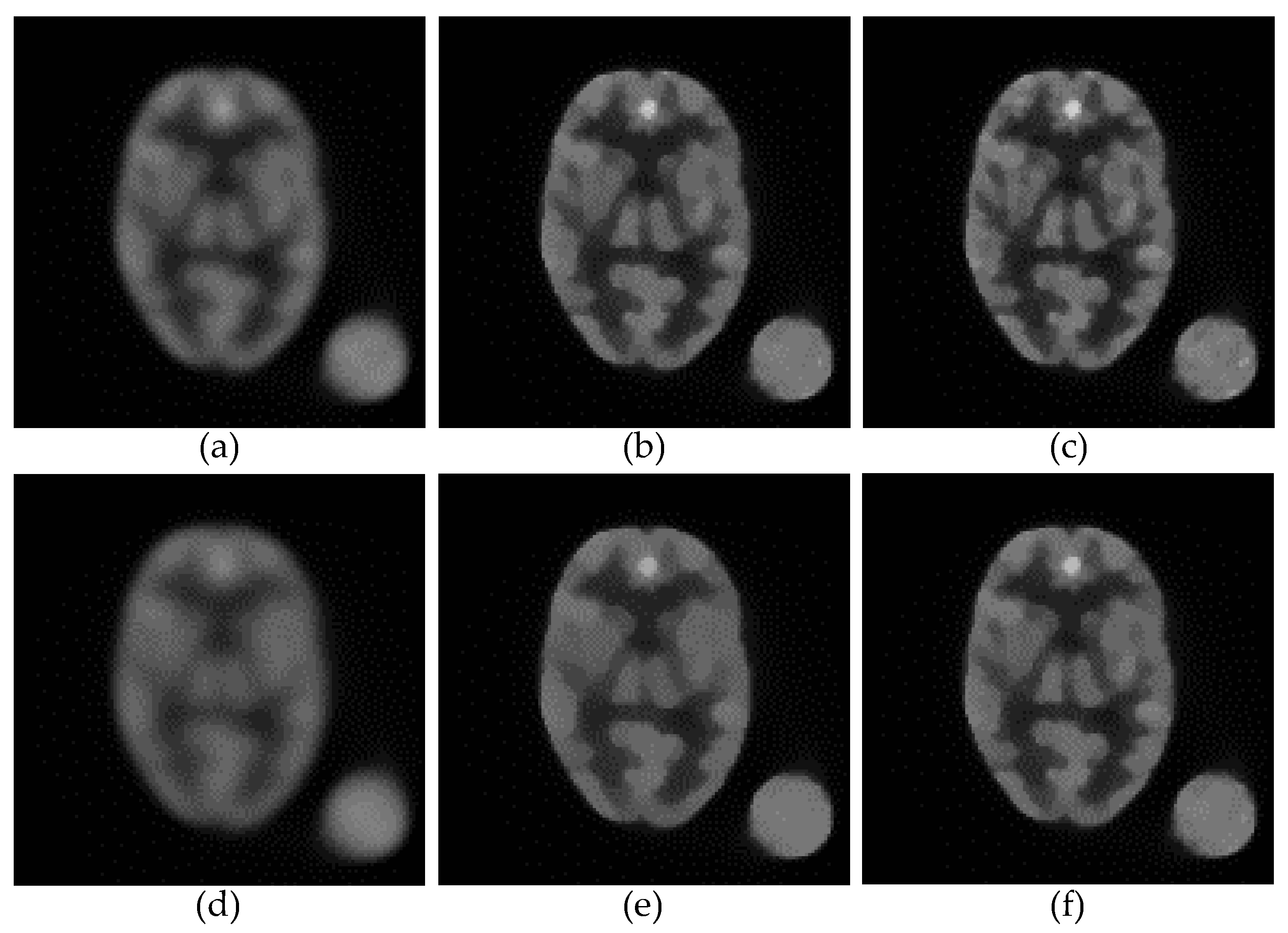
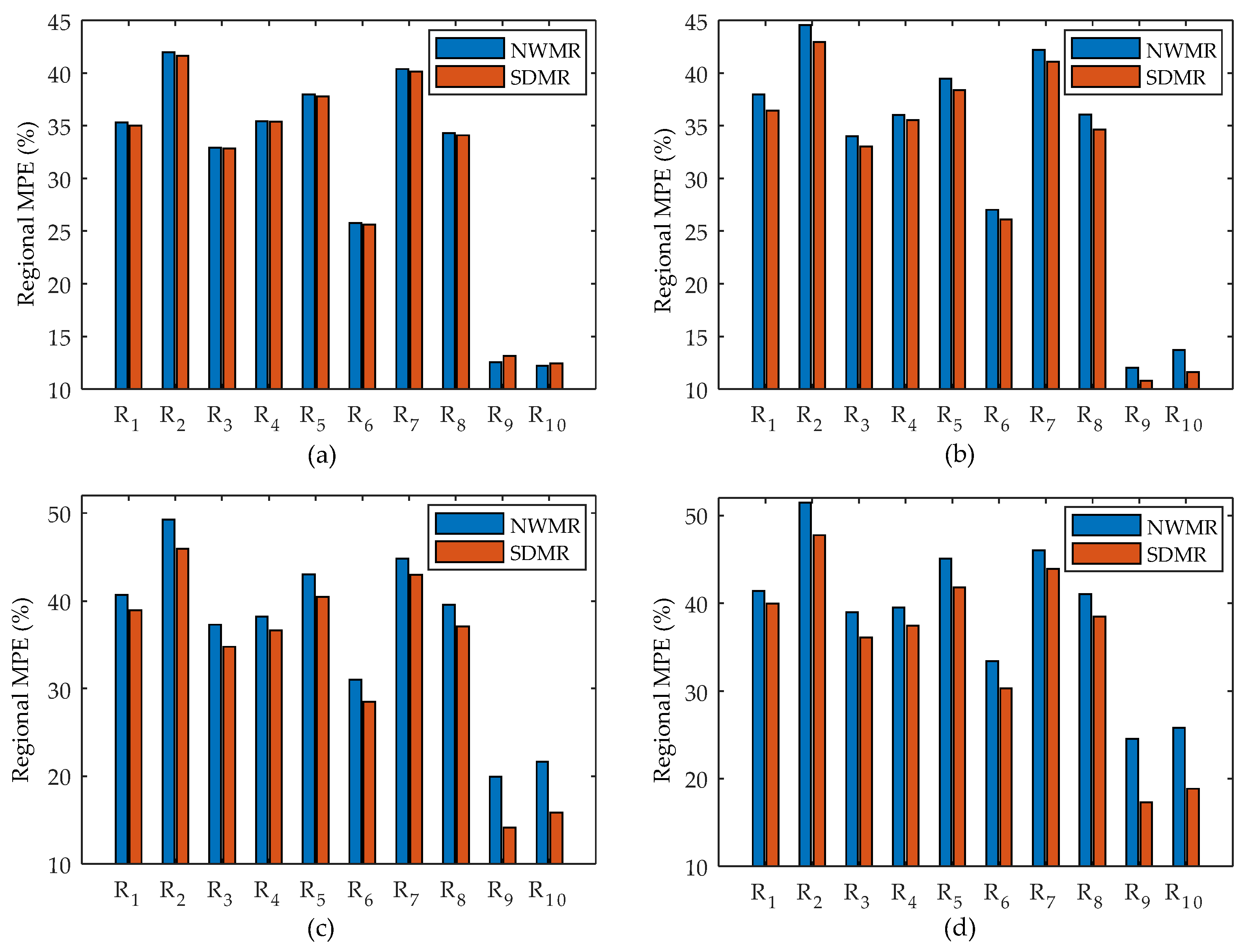
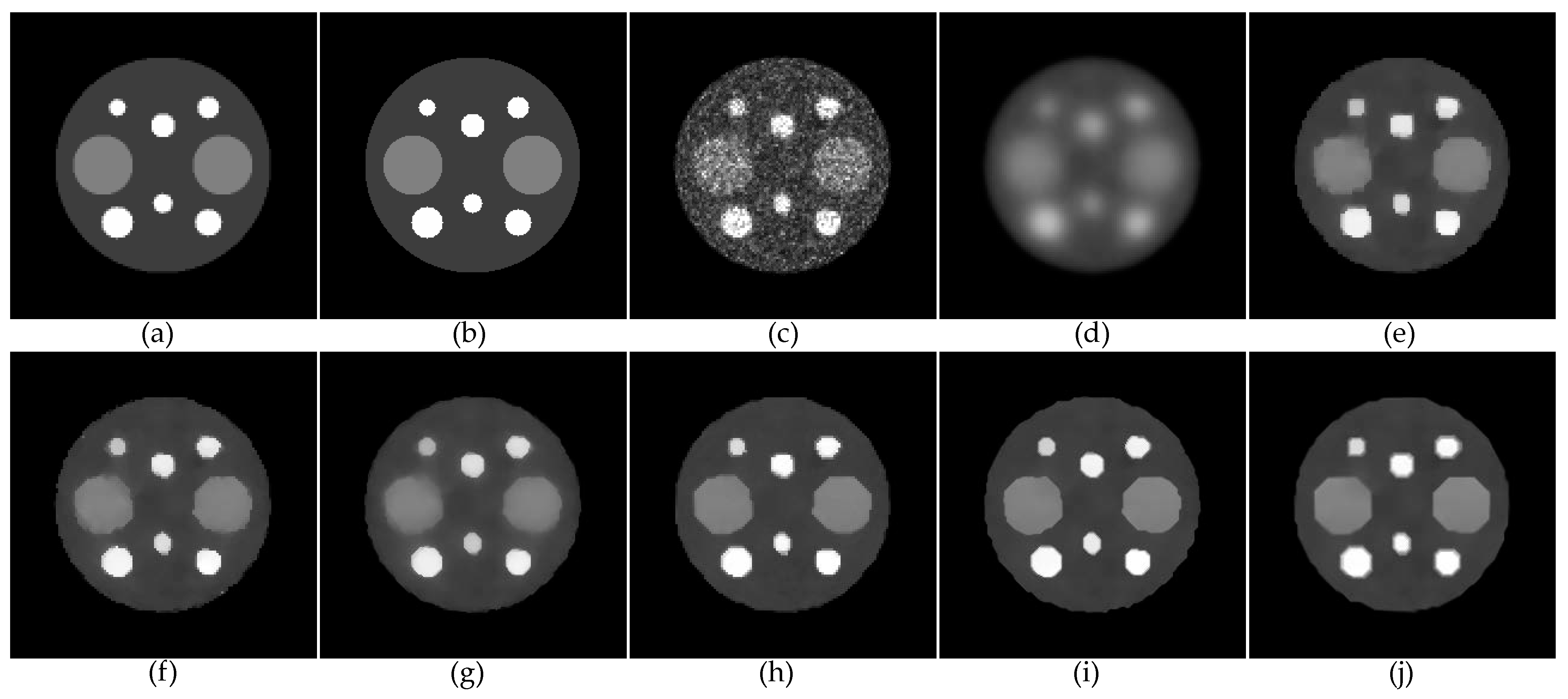
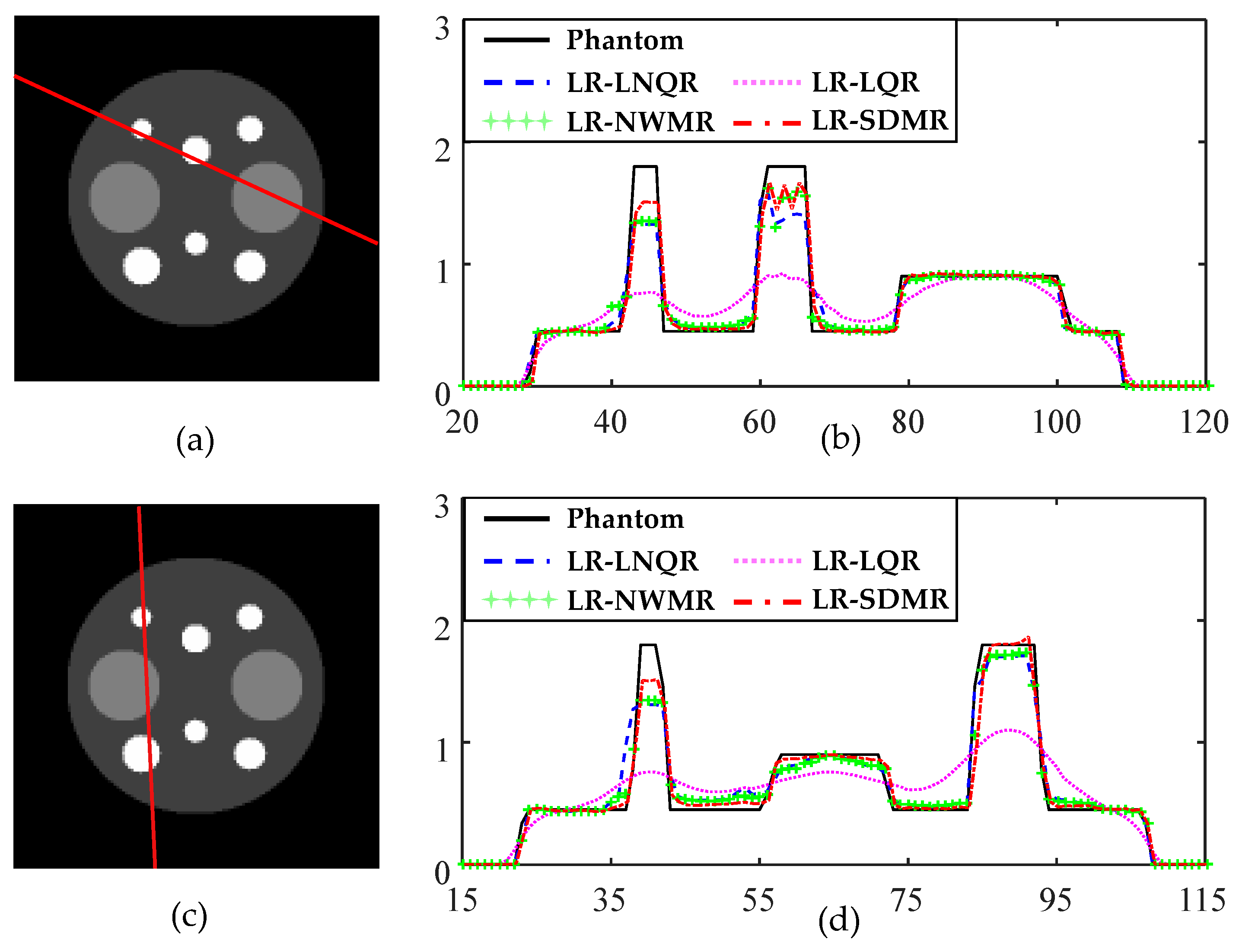
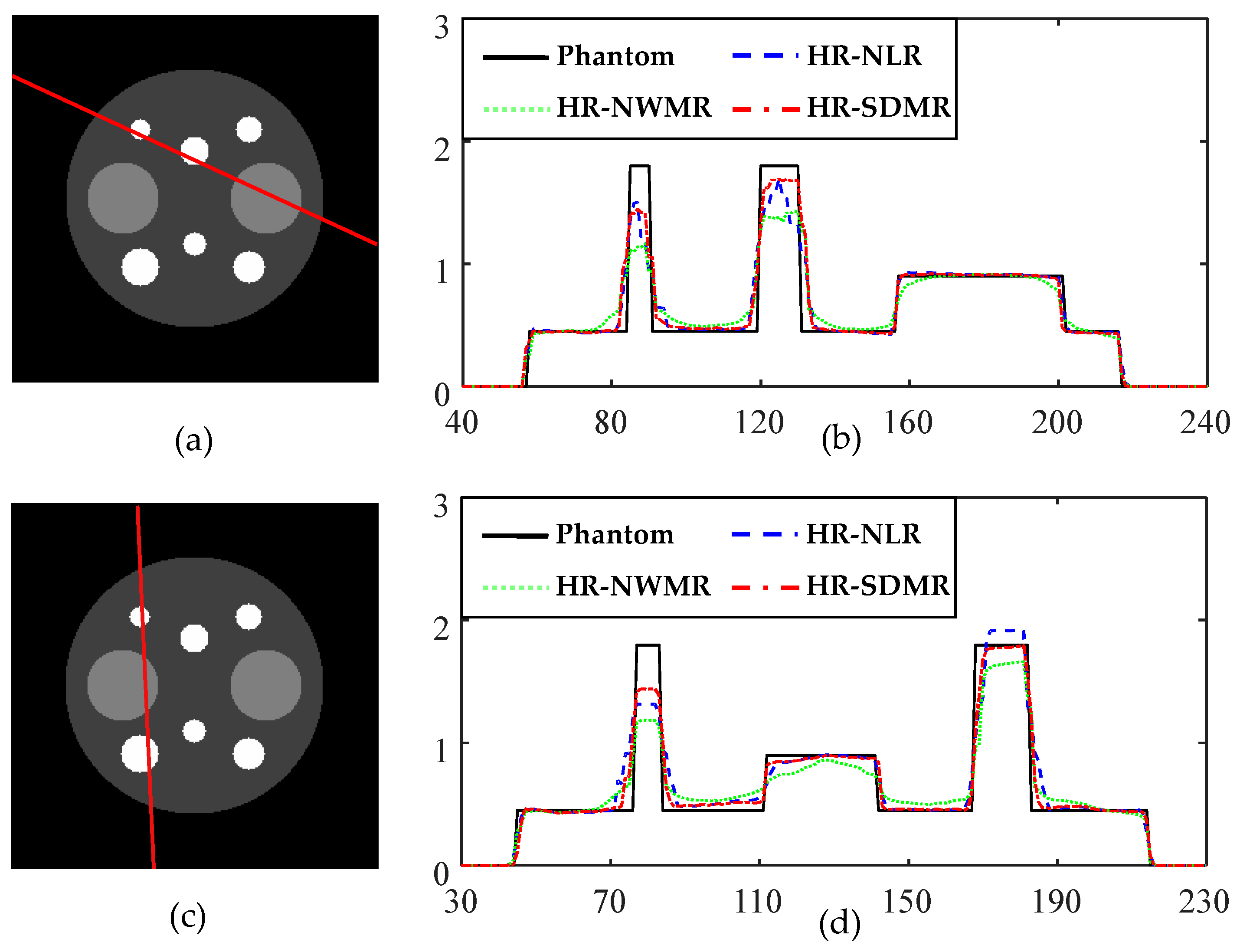
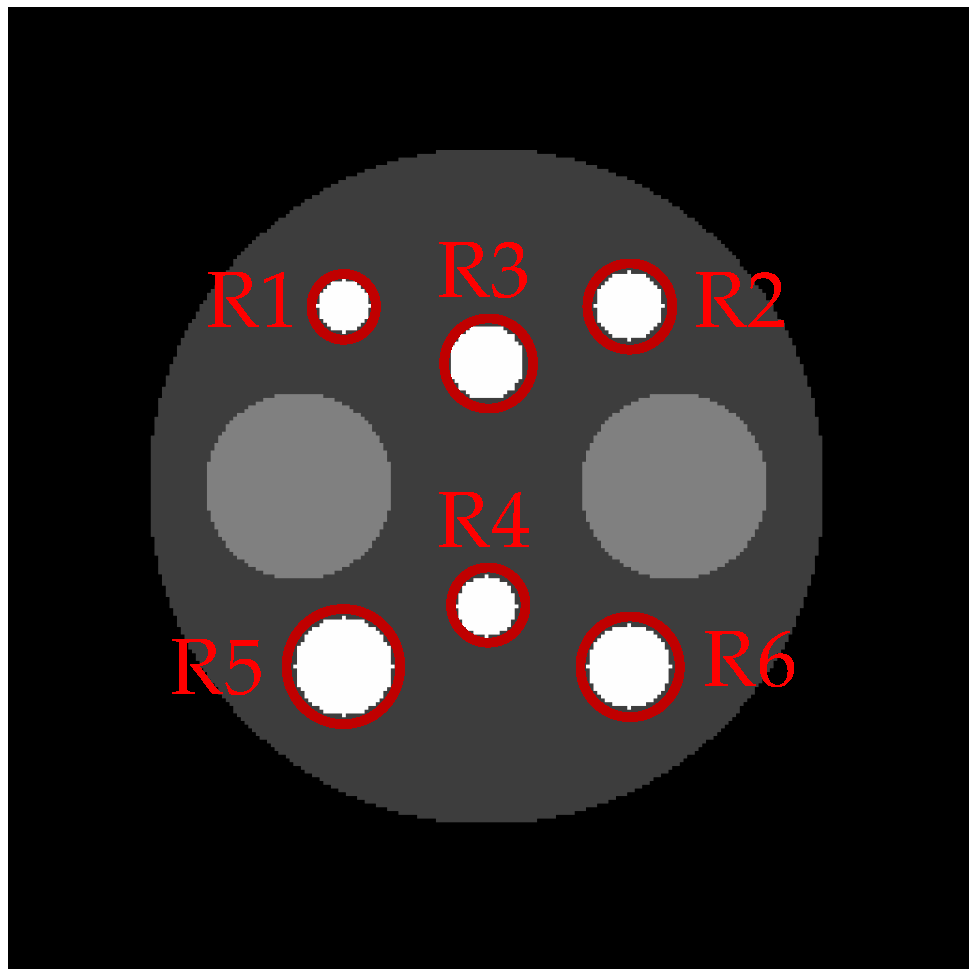
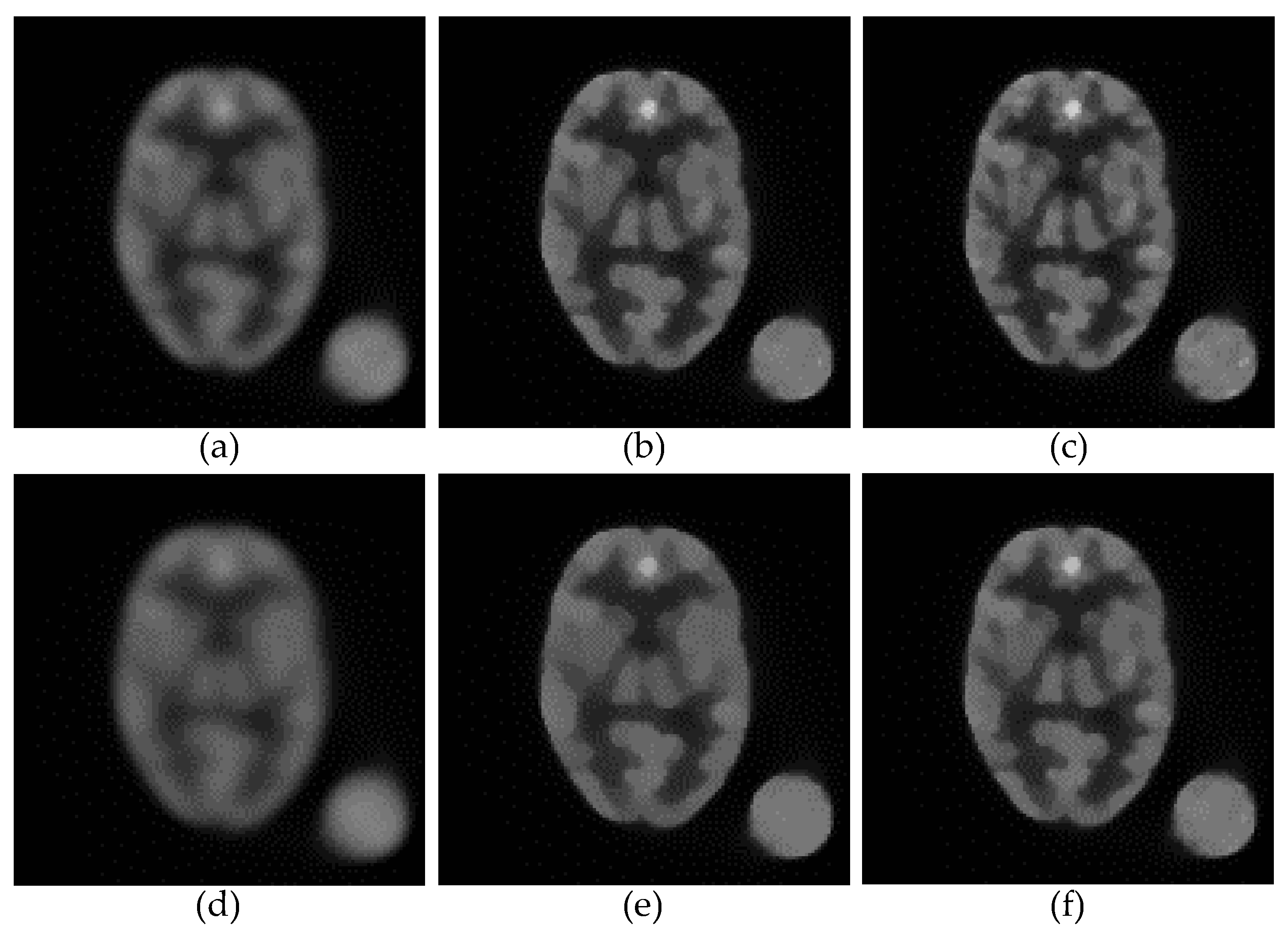
3.1. Reconstruction Accuracy
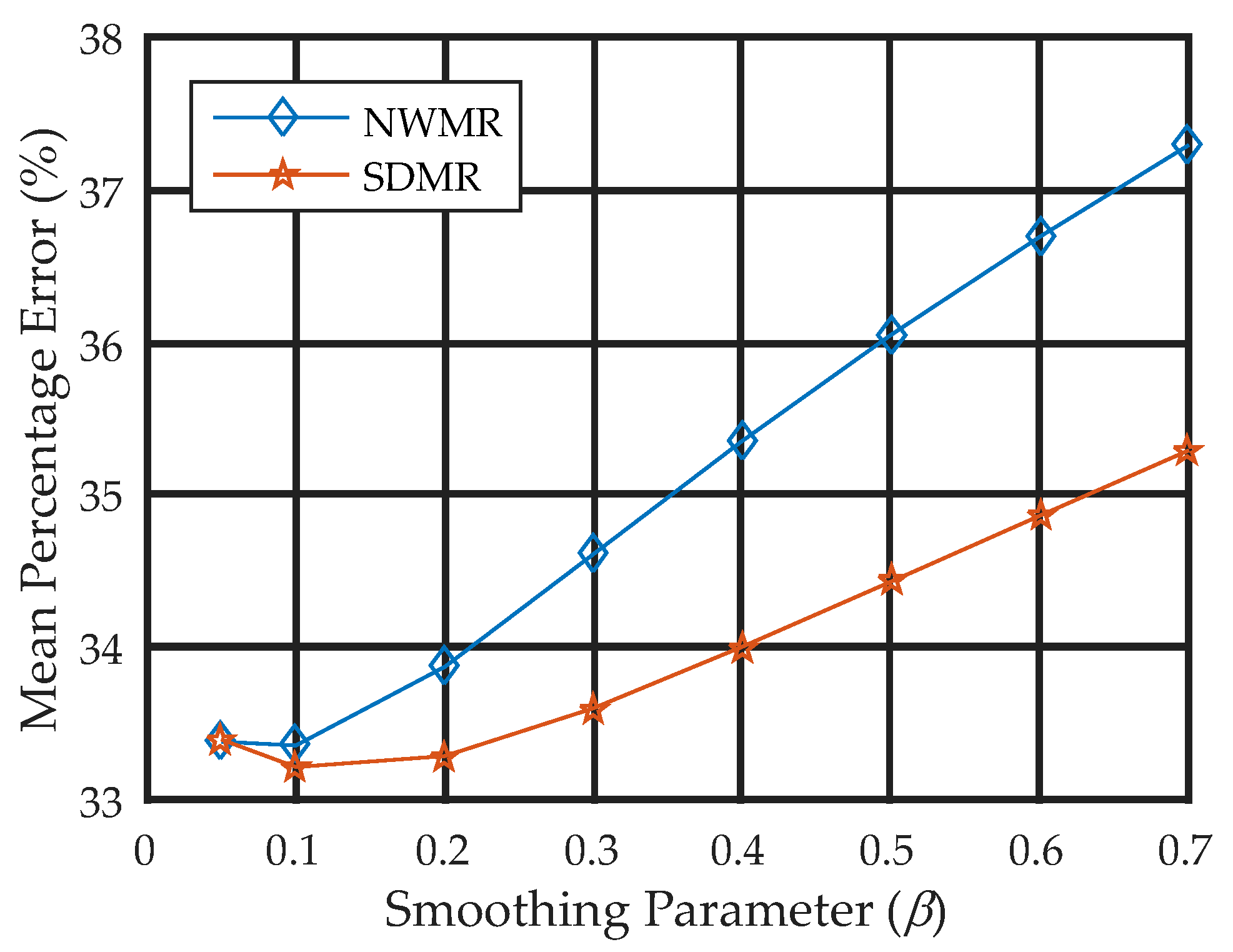
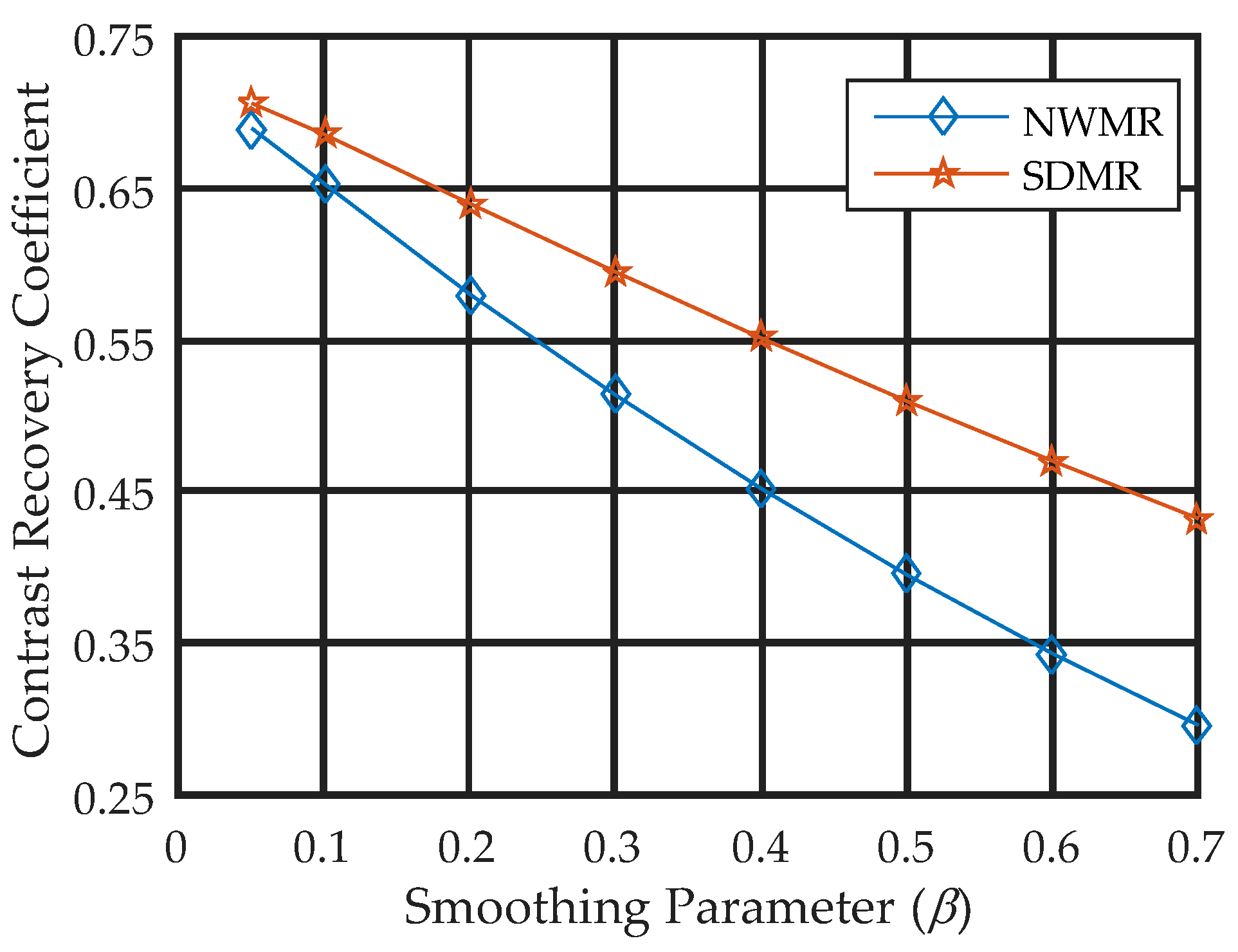
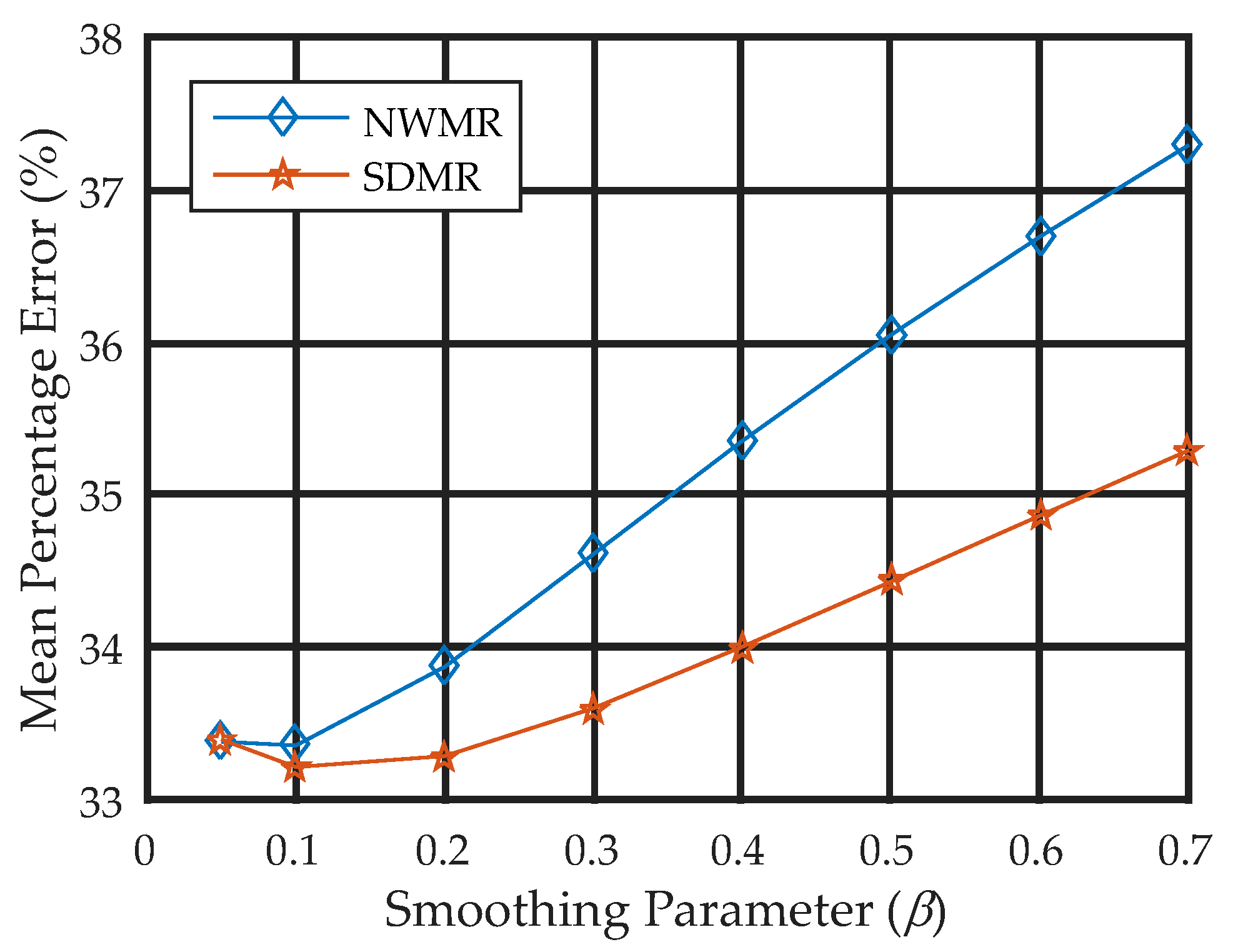
3.2. Robustness against Variation in the Smoothing Parameter
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cherry, S.R.; Sorenson, J.A.; Phelps, M.E. Physics in Nuclear Medicine; Saunders: Philadelphia, PA, USA, 2012. [Google Scholar]
- Ollinger, J.H.; Fessler, J.A. Positron Emission Tomography. IEEE Signal Process. Mag. 1997, 14, 43–55. [Google Scholar] [CrossRef]
- Lewitt, R.M.; Matej, S. Overview of methods for image reconstruction from projections in emission computed tomography. Proc. IEEE 2003, 91, 1588–1611. [Google Scholar] [CrossRef]
- Qi, J.; Leahy, R.M. Iterative reconstruction techniques in emission computed tomography. Phys. Med. Biol. 2006, 51, 541–578. [Google Scholar] [CrossRef]
- Reader, A.J.; Zaidi, H. Advances in PET image reconstruction. PET Clinics 2007, 2, 173–190. [Google Scholar] [CrossRef]
- Sahoo, S.K.; Makur, A. Enhancing image denoising by controlling noise incursion in learned dictionaries. IEEE Signal Process. Lett. 2015, 22, 1123–1126. [Google Scholar] [CrossRef]
- Gong, X.; Chen, W.; Chen, J.A. low-rank tensor dictionary learning method for hyperspectral image denoising. IEEE Trans. Signal Process. 2020, 68, 1168–1180. [Google Scholar] [CrossRef]
- Thakur, R.S.; Yadav, R.N.; Gupta, L. State-of-art analysis of image denoising methods using convolutional neural networks. IET Image Process. 2019, 13, 2367–2380. [Google Scholar] [CrossRef]
- McCann, M.; Jin, K.; Unser, M. Convolutional neural networks for inverse problems in imaging: A review. IEEE Signal Process. 2017, 34, 85–95. [Google Scholar] [CrossRef] [Green Version]
- Sidky, E.Y.; Lorente, I.; Brankov, J.G.; Pan, X. Do CNNs solve the CT inverse problem? IEEE Trans. Biomed. Eng. 2021, 68, 1799–1810. [Google Scholar] [CrossRef] [PubMed]
- Bouman, C.; Sauer, K. A generalized Gaussian image model for edge preserving MAP estimation. IEEE Trans. Image Process. 1993, 2, 296–310. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.-J. Performance comparison of convex-nonquadratic priors for Bayesian tomographic reconstruction. J. Electron. Imaging 2000, 9, 242–250. [Google Scholar] [CrossRef]
- Buades, A.; Coll, B.; Morel, J.M. A review of image denoising algorithms, with a new one. Multiscale Model Simul. 2005, 4, 490–530. [Google Scholar] [CrossRef]
- Wang, G.; Qi, J. Penalized likelihood PET image reconstruction using patch-based edge-preserving regularization. IEEE Trans. Med. Imaging 2012, 31, 2194–2204. [Google Scholar] [CrossRef]
- Nguyen, V.-G.; Lee, S.-J. Incorporating anatomical side information into PET reconstruction using nonlocal regularization. IEEE Trans. Image Process. 2013, 22, 3961–3973. [Google Scholar] [CrossRef] [PubMed]
- Ren, X.; Lee, S.-J. Image reconstruction for emission tomography using intensity normalised patch-based regularization. IET Image Process. 2019, 13, 794–803. [Google Scholar] [CrossRef]
- Alenius, S.; Ruotsalainen, U. Bayesian image reconstruction for emission tomography based on median root prior. Eur. J. Nucl. Med. 1997, 24, 258–265. [Google Scholar]
- Alenius, S.; Routsalainen, U. Generalization of median root prior reconstruction. IEEE Trans. Med. Imaging 2002, 21, 1413–1420. [Google Scholar] [CrossRef]
- Hsiao, I.-T.; Rangarajan, A.; Gindi, G. A new convex edge-preserving median prior with applications to tomography. IEEE Trans. Med. Imaging 2003, 22, 580–585. [Google Scholar] [CrossRef]
- Yin, L.; Yang, R.; Gabbouj, M.; Neuvo, Y. Weighted median filters: A tutorial. IEEE Trans. Circuits Syst. II Analog Digit. Signal Process. 1996, 43, 157–192. [Google Scholar] [CrossRef]
- Arce, G.R. A general weighted median filter structure admitting negative weights. IEEE Trans. Signal Process. 1998, 46, 3195–3205. [Google Scholar] [CrossRef]
- Li, Y.; Arce, G.R.; Bacca, J. Weighted median filters for multichannel signals. IEEE Trans. Image Process. 2006, 54, 4271–4281. [Google Scholar] [CrossRef]
- Chen, J.; Zhan, Y.; Cao, H. Adaptive sequentially weighted median filter for image highly corrupted by impulse noise. IEEE Access 2019, 7, 158545–158556. [Google Scholar] [CrossRef]
- Tsai, R.Y.; Huang, T.S. Multiple frame image restoration and registration. Adv. Comput. Vis. Image Process. 1984, 1, 317–339. [Google Scholar]
- Farsiu, S.; Robinson, M.D.; Elad, M.; Milanfar, P. Fast and robust multiframe super resolution. IEEE Trans. Image Process. 2004, 13, 1327–1344. [Google Scholar] [CrossRef]
- Narsrollahi, K.; Moeslund, T.B. Super-resolution: A comprehensive survey. Vis. Appl. 2014, 25, 1423–1468. [Google Scholar] [CrossRef] [Green Version]
- Laghrib, A.; Hardi, A.; Hakim, A.; Raghay, S. A new multiframe super-resolution based on nonlinear registration and a spatially weighted regularization. Inf. Sci. 2019, 493, 34–56. [Google Scholar] [CrossRef]
- Zhao, L.; Sun, Q.; Zhang, Z. Single Image Super-Resolution Based on Deep Learning Features and Dictionary Model. IEEE Access 2017, 5, 17126–17135. [Google Scholar] [CrossRef]
- Xie, C.; Zeng, W.; Jiang, S.; Lu, X. Multiscale self-similarity and sparse representation based single image super-resolution. Neurocomputing 2017, 260, 92–103. [Google Scholar] [CrossRef]
- Huang, S.; Sun, J.; Yang, Y.; Fang, Y.; Lin, P.; Que, Y. Robust single-image super-resolution based on adaptive edge-preserving smoothing regularization. IEEE Trans. Image Process. 2018, 27, 2650–2663. [Google Scholar] [CrossRef]
- Bifman, A.; Romano, Y.; Elad, M. Unified single-image and video super-resolution via denoising algorithms. IEEE Trans. Image Process. 2019, 28, 6063–6076. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ren, X.; Lee, S.-J. Super-resolution Image Reconstruction from Projections Using Non-local and Local Regularizations. J. Imaging Sci. Technol. 2021, 65, 10502-1–10502-11. [Google Scholar] [CrossRef]
- Shepp, L.; Vardi, Y. Maximum likelihood reconstruction for emission tomography. IEEE Trans. Med. Imaging 1982, 1, 113–122. [Google Scholar] [CrossRef]
- Hudson, H.M.; Larkin, R.S. Accelerated image reconstruction using ordered subsets of projection data. IEEE Trans. Med. Imaging 1994, 13, 601–609. [Google Scholar] [CrossRef] [Green Version]
- Hsiao, I.-T.; Rangarajan, A.; Gindi, G. An accelerated convergent ordered subset algorithm for emission tomography. Phys. Med. Biol. 2004, 49, 2145–2156. [Google Scholar] [CrossRef]
- Ahn, S.; Fessler, J.A. Globally convergent ordered subsets algorithms for emission tomography using relaxed ordered subsets algorithms. IEEE Tran. Med. Imaging 2003, 22, 613–626. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Seshadrinathan, K.; Pappas, T.N.; Safranek, R.J.; Chen, J.; Wang, Z.; Sheikh, H.R.; Bovik, A.C. Image quality assessment. In The Essential Guide to Image Processing, 2nd ed.; Bovik., A., Ed.; Academic Press: Burlington, MA, USA, 2009; pp. 535–595. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Sheikh, H.R.; Bovik, A.C. Image information and visual quality. IEEE Trans. Image Process. 2006, 15, 430–444. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
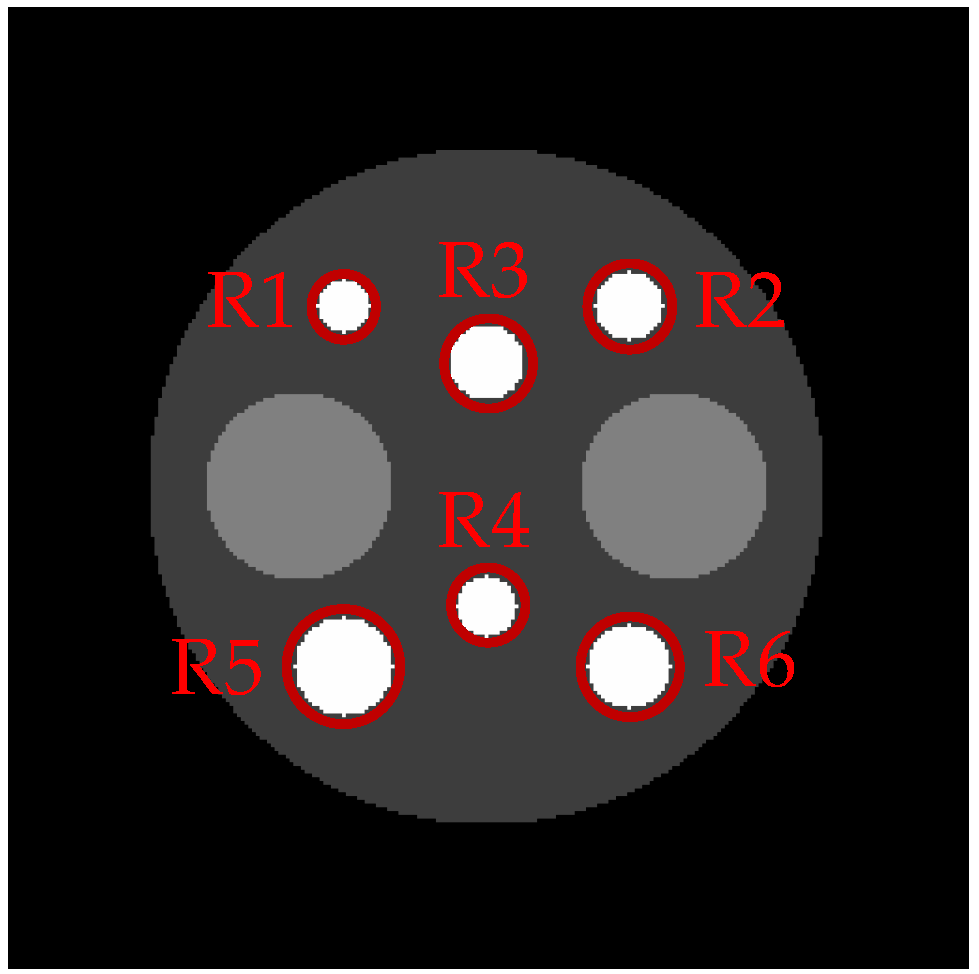
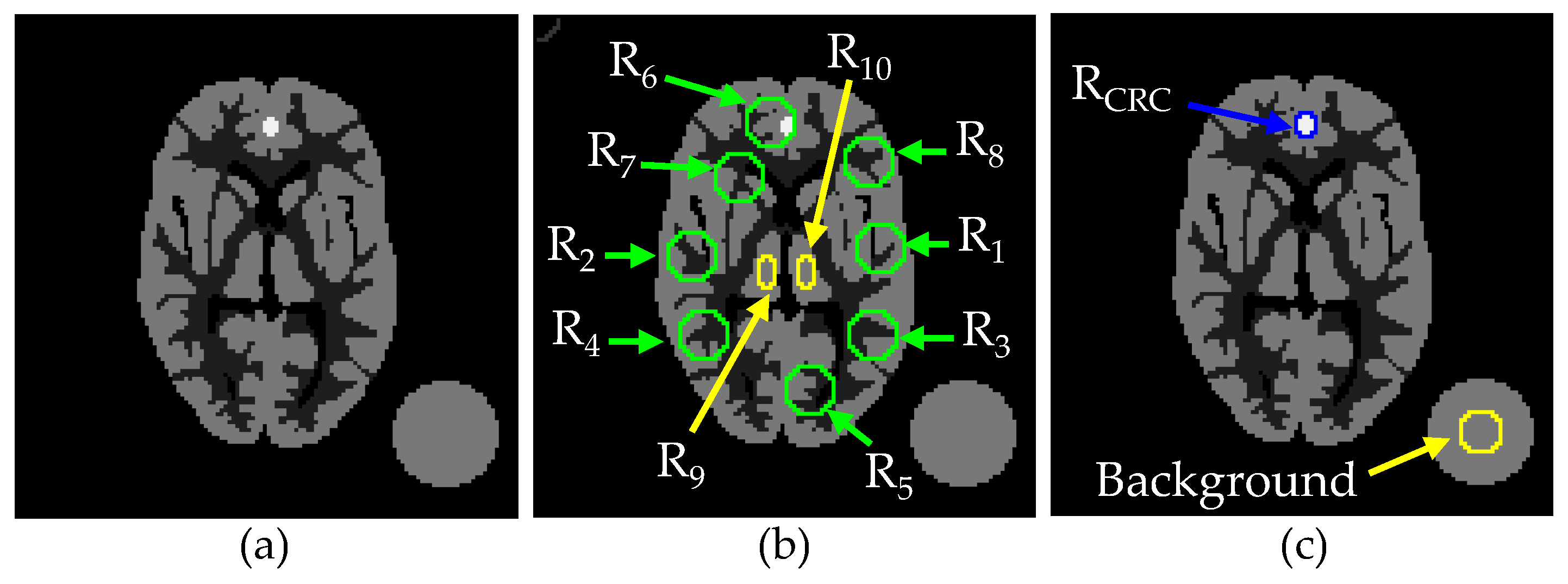
| ROI | LR-LQR | LR-LNQR | LR-NWMR | HR-NWMR | LR-SDMR | HR-SDMR | HR-NLR |
|---|---|---|---|---|---|---|---|
| R1 | 0.3131 | 0.7833 | 0.8046 | 0.7423 | 0.8777 | 0.8805 | 0.8791 |
| R2 | 0.2199 | 0.7024 | 0.7165 | 0.6347 | 0.8090 | 0.8128 | 0.8197 |
| R3 | 0.1986 | 0.6173 | 0.6303 | 0.5336 | 0.7410 | 0.7277 | 0.7384 |
| R4 | 0.3148 | 0.8090 | 0.8164 | 0.7488 | 0.8945 | 0.8844 | 0.8896 |
| R5 | 0.4454 | 0.8627 | 0.8740 | 0.8352 | 0.9256 | 0.9317 | 0.9205 |
| R6 | 0.3853 | 0.8809 | 0.8886 | 0.8395 | 0.9482 | 0.9543 | 0.9302 |
| Assessment Metrics | LR-LQR | LR-LNQR | LR-NWMR | HR-NWMR | LR-SDMR | HR-SDMR | HR-NLR |
|---|---|---|---|---|---|---|---|
| MSSIM | 0.8647 | 0.9421 | 0.9467 | 0.9447 | 0.9525 | 0.9593 | 0.9550 |
| MAE | 5.1005 | 1.7672 | 1.6545 | 2.1027 | 1.2175 | 1.1679 | 1.3433 |
| PSNR (dB) | 20.6715 | 26.4239 | 26.8659 | 26.5827 | 27.3898 | 28.1843 | 27.6263 |
| RMSE | 0.0922 | 0.0475 | 0.0452 | 0.0467 | 0.0425 | 0.0388 | 0.0414 |
| VIF | 0.1340 | 0.2973 | 0.3224 | 0.3275 | 0.3483 | 0.3460 | 0.3394 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, X.; Jung, J.E.; Zhu, W.; Lee, S.-J. Penalized-Likelihood PET Image Reconstruction Using Similarity-Driven Median Regularization. Tomography 2022, 8, 158-174. https://doi.org/10.3390/tomography8010013
Ren X, Jung JE, Zhu W, Lee S-J. Penalized-Likelihood PET Image Reconstruction Using Similarity-Driven Median Regularization. Tomography. 2022; 8(1):158-174. https://doi.org/10.3390/tomography8010013
Chicago/Turabian StyleRen, Xue, Ji Eun Jung, Wen Zhu, and Soo-Jin Lee. 2022. "Penalized-Likelihood PET Image Reconstruction Using Similarity-Driven Median Regularization" Tomography 8, no. 1: 158-174. https://doi.org/10.3390/tomography8010013
APA StyleRen, X., Jung, J. E., Zhu, W., & Lee, S.-J. (2022). Penalized-Likelihood PET Image Reconstruction Using Similarity-Driven Median Regularization. Tomography, 8(1), 158-174. https://doi.org/10.3390/tomography8010013