
Application of Improved Sparrow Search Algorithm to Path Planning of Mobile Robots


Abstract
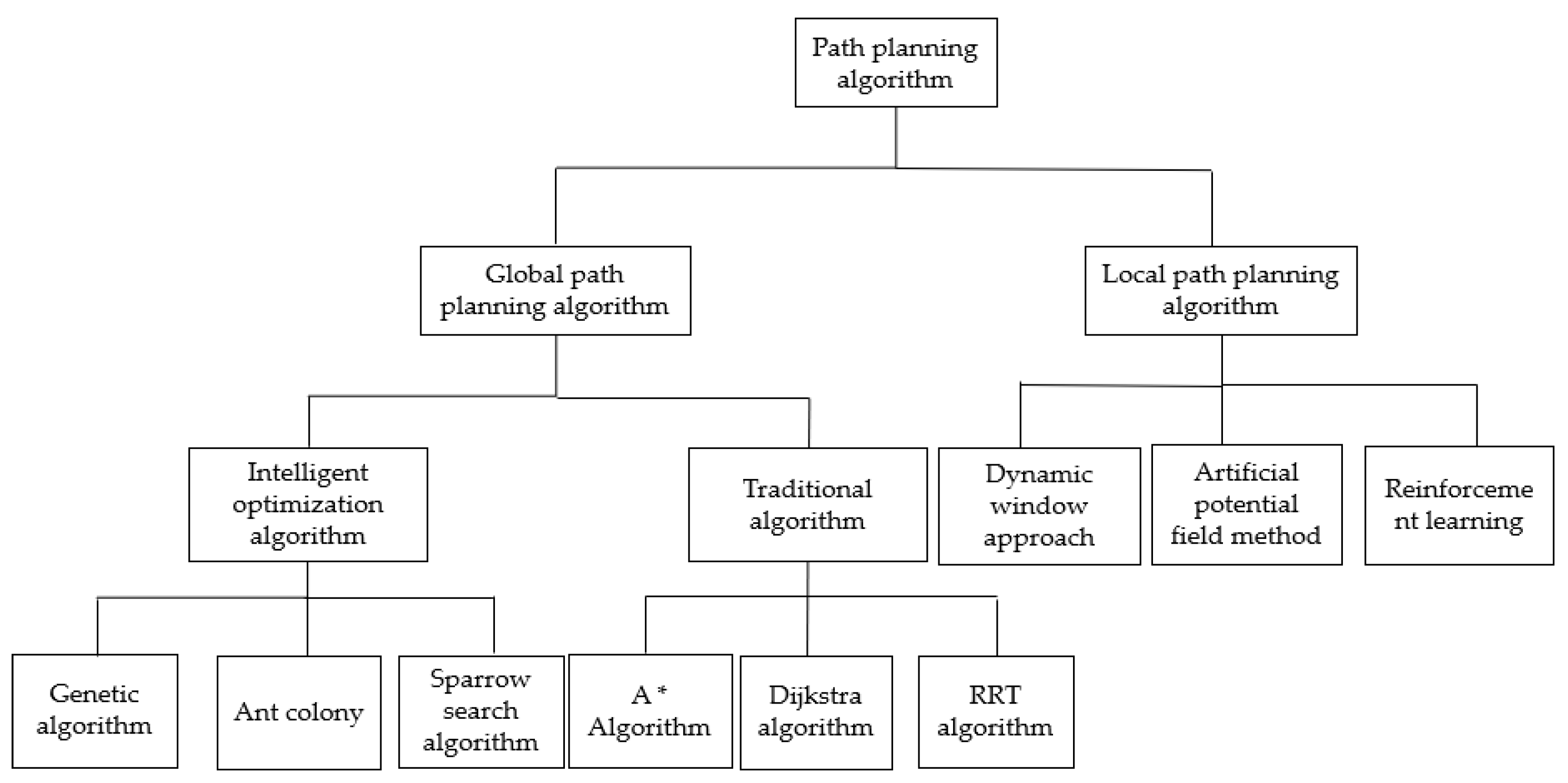
1. Introduction
2. Sparrow Search Algorithm
| Algorithm 1 The framework of the SSA |
| Input: T: the maximum iterations nump: the number of producers nums: the number of sparrows who perceive the danger R2: the alarm value pop: the number of sparrows Initialize a population of n sparrows and define its relevant parameters. Output: Xbest, fg. 1: while (t < T) 2: Rank the fitness values and find the current best individual and the current worst individual. 3: R2 = rand(1) 4: for i = 1: nump 5: Using Equation (1) update the sparrow’s location; 6: end for 7: for i = (nump + 1): pop 8: Using Equation (2) update the sparrow’s location; 9: end for 10: for l = 1: nums 11: Using Equation (3) update the sparrow’s location; 12: end for 13: Get the current new location; 14: If the new location is better than before, update it; 15: t = t + 1 16: end while 17: return Xbest, fg. |
3. Improved Sparrow Search Algorithm
3.1. Circular Chaotic Mapping
3.2. Integration of Northern Goshawk Exploration Phase Location Strategy
3.3. Lévy Flight Strategy
3.4. Adaptive T-Distribution Variation Strategy
| Algorithm 2 Improved sparrow search algorithm (ISSA) |
| Input: T: the maximum iterations nump: the number of producers nums: the number of sparrows who perceive the danger R2: the alarm value pop: the number of sparrows Circle maps the Halton sequence to initialize the sparrow population pop and define relevant parameters; Output: Xbest, fg. 1: while (t < T) 2: Rank the fitness values and find the current best individual and the current worst individual. 3: R2 = rand(1) 4: for i = 1: nump 5: Using Equation (5) update the sparrow’s location; 6: end for 7: for i = (nump + 1): pop 8: Using Equation (6) update the sparrow’s location; 9: end for 10: for l = 1: nums 11: Using Equation (3) update the sparrow’s location; 12: end for 13:If rand < p, adaptive t-distribution mutation is performed according to Formula (9),the current optimal value is disturbed, and a new solution is generated. 14: Get the current new location; 15: Determine whether the conditions are met and output the results if they are met. Otherwise, repeat the 2 until the end condition is met.; 16: t = t + 1 17: end while 18: return Xbest, fg. |
4. Algorithm Performance Test
4.1. Algorithm Parameter Settings
4.2. Comparative Analysis of Algorithm Performance
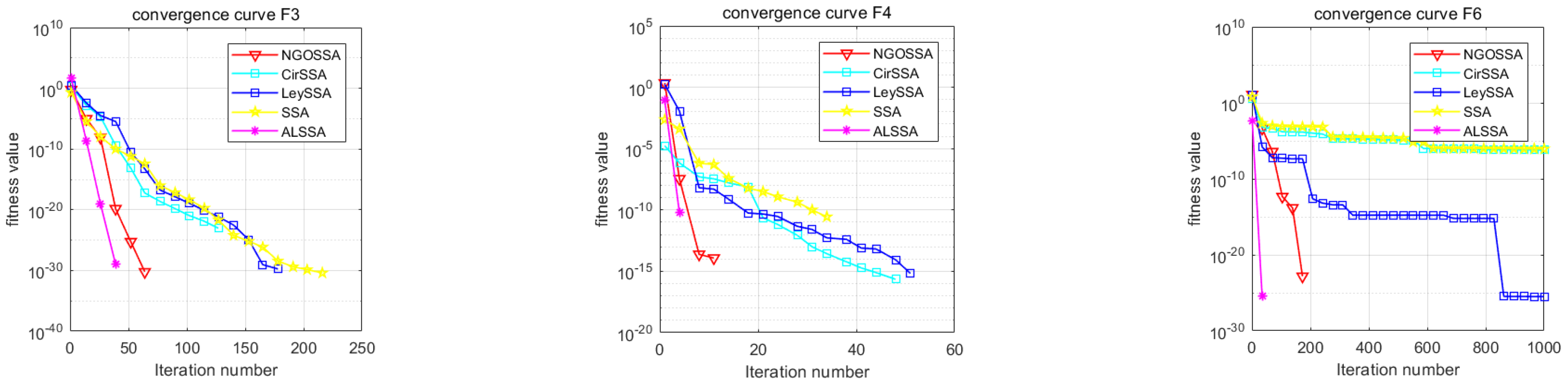
4.2.1. Comparative Analysis of Algorithm Convergence Curves and Boxplots
4.2.2. Compared with the Improved Sparrow Algorithm (CASSA), Which Combines Cauchy Mutation and Opposition-Based Learning
4.2.3. Ablation Experiment
5. Mobile Robot Path Planning
5.1. Environmental Model Map Building
5.2. Establishment of the Random-Obstacle Environment Map
5.3. Path-Planning Problem Research
- (1)
- Distance factor
- (2)
- Turning factorswhere n is the number of steering times. This method determines whether the robot turns at the point by comparing the values of the arc-tangent function corresponding to the two path points before and after: if the values of the arc-tangent function before and after are not equal, it indicates that the robot completes the turn at that point, and the number of turns at that point is recorded as 1; otherwise, the number of turns at that point is recorded as 0. The turning factor is defined as the path that has the minimum number of turning times and, thus, guides the individual sparrow to minimize the turns as much as possible, which is particularly important in complex environments where there are more obstacles.
- (3)
- Elevation factor
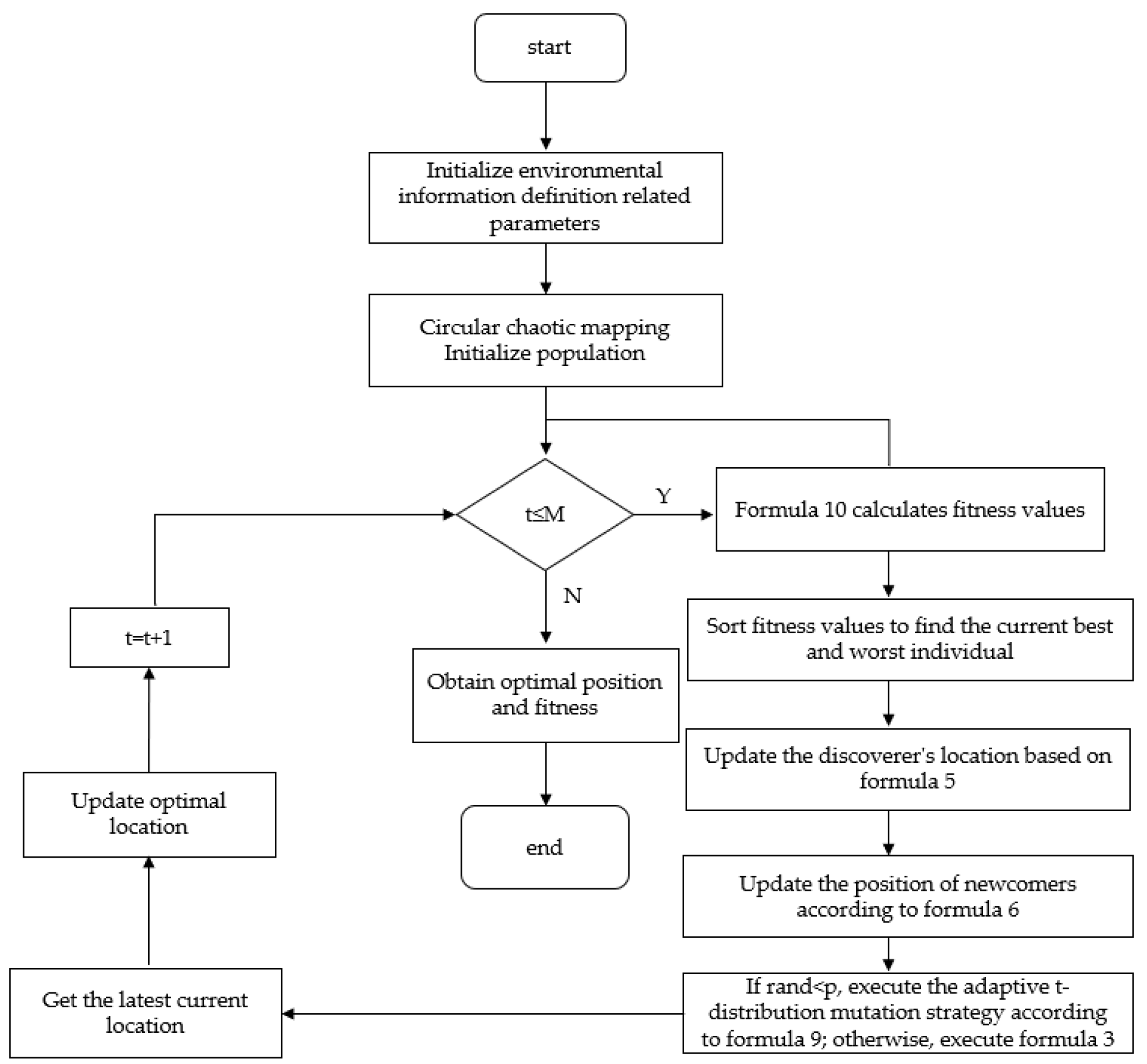
5.4. ISSA-Based Global Path-Planning Method for Mobile Robots
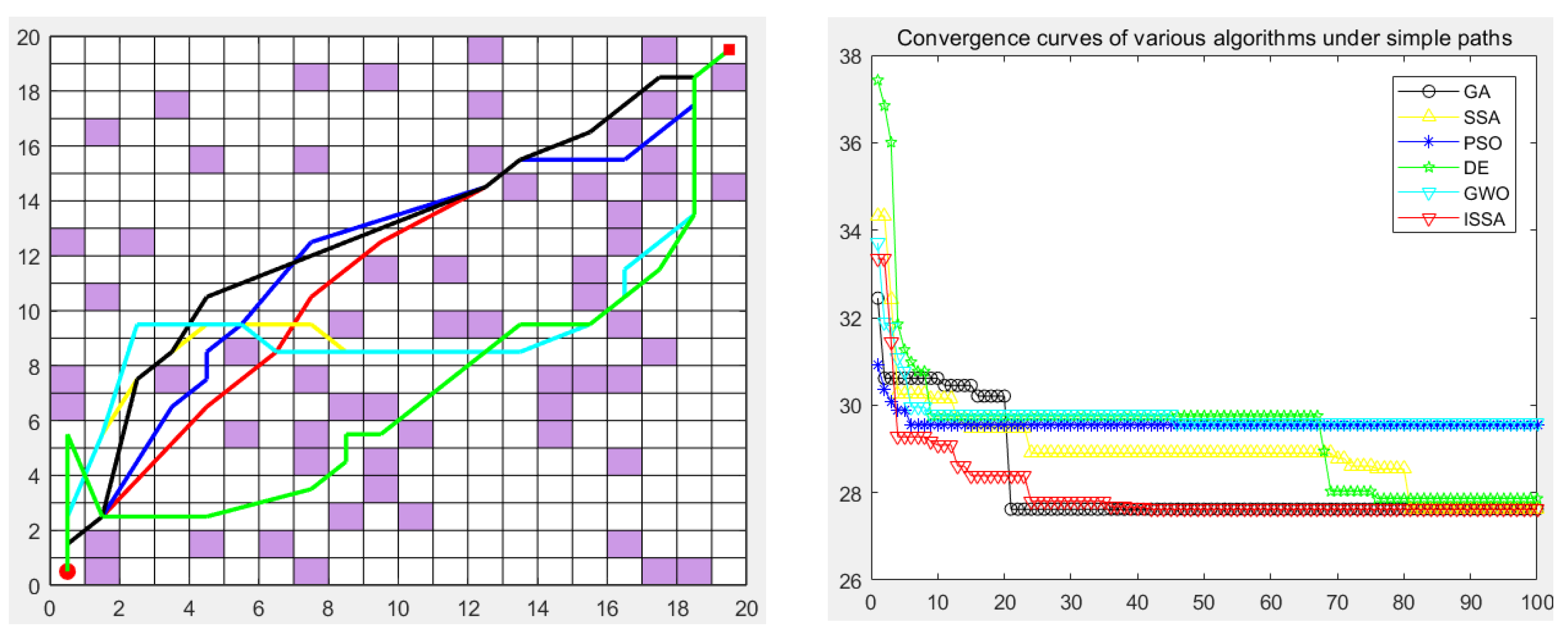
5.5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, D.; Yan, M. Overview of path planning technology for mobile robots. Control Decis. Mak. 2010, 25, 961–967. [Google Scholar]
- Dai, B.; Xiao, X.; Cai, Z. The research status and prospects of path planning technology for mobile robots. Control Eng. 2005, 12, 198–202. [Google Scholar]
- Zhang, Y.; Zhang, A.; Zhang, Z.; Zhang, J. Tactical Flight Path Planning Algorithm. J. Transp. Eng. 2006, 6, 84–87. [Google Scholar]
- Le, Y.; Gong, J. An Efficient Implementation of Dijkstra’s Shortest Path Algorithm. Geomat. Inf. Sci. Wuhan Univ. 1999, 3, 209–212. [Google Scholar]
- Li, J.; Sun, X. Research on UAV trajectory planning algorithm based on improved A-Star algorithm. J. Ordnance Ind. 2008, 29, 788–792. [Google Scholar]
- Kaveh, A.; Talatahari, S. An improved ant colony optimization for constrained engineering design problems. Eng. Comput. 2010, 27, 155–182. [Google Scholar] [CrossRef]
- Jiang, Y.; Hu, T.; Huang, C.C.; Wu, X. An improved particle swarm optimization algorithm. Appl. Math. Comput. 2007, 193, 231–239. [Google Scholar] [CrossRef]
- Park, J.B.; Park, Y.M.; Won, J.R.; Lee, K.Y. An improved genetic algorithm for generation expansion planning. IEEE Trans. Power Syst. 2000, 15, 916–922. [Google Scholar] [CrossRef]
- Chen, J.; Fan, Y.; Dai, X. Research on Intelligent Vehicle Path Planning with Improved Sparrow Search Algorithm. J. Chongqing Univ. Technol. 2023, 37, 50–56. [Google Scholar]
- Tuerxun, W.; Chang, X.; Hongyu, G.; Zhijie, J.; Huajian, Z. Fault diagnosis of wind turbines based on a support vector machine optimized by the sparrow search algorithm. IEEE Access 2021, 9, 69307–69315. [Google Scholar] [CrossRef]
- Song, L.; Chen, W.; Chen, W.; Lin, Y.; Sun, X. Improvement and Application of Sparrow Search Algorithm Based on Hybrid Strategy. J. Beihang Univ. 2022, 49, 2187–2199. [Google Scholar]
- Chen, Z.; Liang, D.; Deng, X.; Zhang, Y. Performance analysis and improvement of logistic chaotic mapping. J. Electron. Inf. 2016, 38, 1547–1551. [Google Scholar]
- Alsattar, H.A.; Zaidan, A.A.; Zaidan, B.B. Novel meta-heuristic bald eagle search optimisation algorithm. Artif. Intell. Rev. 2020, 53, 2237–2264. [Google Scholar] [CrossRef]
- Liu, C.; Ye, C. A bat algorithm with L é vy flight characteristics. J. Intell. Syst. 2013, 8, 240–246. [Google Scholar]
- McDonald, J.B.; Newey, W.K. Partially adaptive estimation of regression models via the generalized t distribution. Econom. Theory 1988, 4, 428–457. [Google Scholar] [CrossRef]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Xue, J.; Bo, S. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2023, 79, 7305–7336. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; El-Shahat, D.; Jameel, M.; Abouhawwash, M. Young’s double-slit experiment optimizer: A novel metaheuristic optimization algorithm for global and constraint optimization problems. Comput. Methods Appl. Mech. Eng. 2023, 403, 115652. [Google Scholar] [CrossRef]
- Li, Y.; Lin, X.; Liu, J. An improved gray wolf optimization algorithm to solve engineering problems. Sustainability 2021, 13, 3208. [Google Scholar] [CrossRef]
- Dehghani, M.; Hubalovsky, S.; Trojovsky, P. Northern goshawk optimization: A new swarm-based algorithm for solving optimization problems. IEEE Access 2021, 9, 162059–162080. [Google Scholar] [CrossRef]
- Hadi, A.A.; Agrawal, P.; Sallam, K.M.; Mohamed, A.K. Gaining-sharing knowledge based algorithm with adaptive parameters hybrid with IMODE algorithm for solving CEC 2021 benchmark problems. In Proceedings of the 2021 IEEE Congress on Evolutionary Computation (CEC), Kraków, Poland, 28 June 2021–1 July 2021. [Google Scholar]
- Pfannkuch, M. Comparing box plot distributions: A teacher’s reasoning. Stat. Educ. Res. J. 2006, 5, 27–45. [Google Scholar] [CrossRef]
- Mao, Q.; Zhang, Q. Improved Sparrow Algorithm Combining Cauchy Mutation and Reverse Learning. Comput. Sci. Explor. 2021, 15, 1155–1164. [Google Scholar] [CrossRef]
- Zheng, B.; Jiang, G.; Wang, W.; Wang, K.; Mei, X. Ablation experiment and threshold calculation of titanium alloy irradiated by ultra-fast pulse laser. AIP Adv. 2014, 4, 031310. [Google Scholar] [CrossRef]
- Tian, C.; Liu, Y.; Feng, S.; Zhu, S. A complete traversal algorithm for mobile robots based on grid maps—Rectangular decomposition method. J. Mech. Eng. 2004, 40, 56–61. [Google Scholar] [CrossRef]
- Kuhnert, M.; Voinov, A.; Seppelt, R. Comparing raster map comparison algorithms for spatial modeling and analysis. Photogramm. Eng. Remote Sens. 2005, 71, 975–984. [Google Scholar] [CrossRef]
- Li, Y.; Jin, R.; Xu, X.; Qian, Y.; Wang, H.; Xu, S.; Wang, Z. A Mobile Robot Path Planning Algorithm Based on Improved A* Algorithm and Dynamic Window Approach. IEEE Access 2022, 10, 57736–57747. [Google Scholar] [CrossRef]
- Bai, J. Platinum Coca Research on Path Planning for Mobile Robots. Master’s Thesis, Henan University, Kaifeng, China, 2011. [Google Scholar] [CrossRef]
- Li, Z. Research on Mobile Robot Motion Planning with Improved Sparrow Search Algorithm. Master’s Thesis, Chongqing Jiaotong University, Chongqing, China, 2023. [Google Scholar] [CrossRef]
- Luan, P.G.; Thinh, N.T. Hybrid genetic algorithm based smooth global-path planning for a mobile robot. Mech. Based Des. Struct. Mach. 2021, 51, 1758–1774. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Chen, J. Research on Intelligent Vehicle Path Planning Based on Improved Sparrow Search Algorithm. Master’s Thesis, Taiyuan University of Science and Technology, Taiyuan, China, 2023. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Arithmetic | Parameterization |
|---|---|
| SSA | PD = 20%, R2 = 0.8, SD = 10% |
| ISSA | PD = 20%, R2 = 0.8, SD = 10%, ωmax = 1, ωmin = 0.4 |
| DBO | γ = 0.1, k = 0.1, u = 0.3, s = 0.5 |
| GWO | a decreases from 2 to 0 |
| NGO | R = 0. 02 × (1 − t/Maxiter), w = 0.9 |
| PSO | wmax = 0.9, wmin = 0.4, c1 = c2 = 2 |
| CASSA | PD = 20%, R2 = 0.8, SD = 10%, ωmax = 1, ωmin = 0.4 |
| YDSE | I = 0.01, L = 1, d = 5 × 10−3 |
| No. | Function | FI * | |
|---|---|---|---|
| Unimodal Function | 1 | Shifted and Rotated Bent Cigar Function (CEC 2017 [4] F1) | 100 |
| Basic Functions | 2 | Shifted and Rotated Schwefel’s Function (CEC 2014 [3] F11) | 1100 |
| 3 | Shifted and Rotated Lunacek bi-Rastrigin Function (CEC 2017 [4] F7) | 700 | |
| 4 | Expanded Rosenbrock’s plus Griewangk’s Function (CEC2017 [4] f19) | 1900 | |
| Hybrid Functions | 5 | Hybrid Function 1 (N = 3) (CEC 2014 [3] F17) | 1700 |
| 6 | Hybrid Function 2 (N = 4) (CEC 2017 [4] F16) | 1600 | |
| 7 | Hybrid Function 3 (N = 5) (CEC 2014 [3] F21) | 2100 | |
| Composition Functions | 8 | Composition Function 1 (N = 3) (CEC 2017 [4] F22) | 2200 |
| 9 | Composition Function 2 (N = 4) (CEC 2017 [4] F24) | 2400 | |
| 10 | Composition Function 3 (N = 5) (CEC 2017 [4] F25) | 2500 | |
| Search range: [−100, 100]D | |||
| ISSA | SSA | DBO | YDSE | GWO | PSO | NGO | HHO | ||
|---|---|---|---|---|---|---|---|---|---|
| F1 | min | 0 | 0 | 0 | 0.015284 | 2.4 × 10−118 | 3.04 × 10−18 | 1.9 × 10−200 | 9.1 × 10−212 |
| std | 0 | 1.86 × 10−68 | 0 | 0.200305 | 3.5 × 10−111 | 2537.081 | 0 | 0 | |
| avg | 0 | 3.39 × 10−69 | 2.3 × 10−223 | 0.250047 | 1.3 × 10−111 | 666.6667 | 5.1 × 10−195 | 8.8 × 10−177 | |
| median | 0 | 7.44 × 10−79 | 1.9 × 10−262 | 0.193235 | 4.8 × 10−114 | 1.2 × 10−16 | 9.9 × 10−197 | 2.5 × 10−193 | |
| worse | 0 | 1.02 × 10−67 | 6.8 × 10−232 | 0.789163 | 1.5 × 10−110 | 10000 | 6 × 10−194 | 2.6 × 10−175 | |
| F2 | min | 0 | 0 | 0 | 19.02603 | 0 | 0.249818 | 0 | 0 |
| std | 0 | 0 | 0.022805 | 186.9538 | 4.064476 | 116.2454 | 0.087062 | 0 | |
| avg | 0 | 0 | 0.004164 | 388.8823 | 2.143601 | 99.71918 | 0.027247 | 0 | |
| median | 0 | 0 | 0 | 354.8508 | 9.09 × 10−13 | 66.23645 | 0 | 0 | |
| worse | 0 | 0 | 0.124909 | 790.2157 | 15.18306 | 458.4334 | 0.380224 | 0 | |
| F3 | min | 0 | 0 | 0 | 18.2813 | 0 | 0.994959 | 0 | 0 |
| std | 0 | 0 | 16.99432 | 4.573419 | 17.24524 | 5.390551 | 4.14 × 10−27 | 0 | |
| avg | 0 | 0 | 9.343137 | 25.28394 | 31.76978 | 10.4188 | 7.56 × 10−28 | 0 | |
| median | 0 | 0 | 0 | 25.47547 | 36.66364 | 12.14196 | 0 | 0 | |
| worse | 0 | 0 | 54.41579 | 35.16091 | 64.03087 | 21.03211 | 2.27 × 10−26 | 0 | |
| F4 | min | 0 | 0 | 0 | 0.696801 | 0 | 0.42937 | 0 | 0 |
| std | 0 | 0 | 0.838748 | 0.315215 | 0.564758 | 0.19892 | 0.035287 | 0 | |
| avg | 0 | 0 | 0.562159 | 1.250387 | 0.336316 | 0.713897 | 0.009235 | 0 | |
| median | 0 | 0 | 0 | 1.200206 | 0.020998 | 0.668404 | 0 | 0 | |
| worse | 0 | 0 | 2.666209 | 1.957046 | 2.058048 | 1.139975 | 0.150512 | 0 | |
| F5 | min | 0 | 0 | 2.3 × 10−261 | 14.86381 | 3.34 × 10−96 | 0.416286 | 4.2 × 10−27 | 6.7 × 10−207 |
| std | 0 | 3.24 × 10−16 | 1.86 × 10−19 | 14.30704 | 0.529293 | 152.4478 | 8.94 × 10−25 | 0 | |
| avg | 0 | 6.82 × 10−17 | 3.79 × 10−20 | 37.92861 | 0.166304 | 181.6502 | 2.65 × 10−25 | 2.4 × 10−173 | |
| median | 0 | 9.61 × 10−19 | 4.83 × 10−28 | 35.9939 | 1.26 × 10−31 | 163.1174 | 8.22 × 10−26 | 5.9 × 10−188 | |
| worse | 0 | 1.78 × 10−15 | 1.02 × 10−18 | 69.52328 | 2.227112 | 526.4074 | 4.96 × 10−24 | 5.5 × 10−172 | |
| F6 | min | 0 | 0 | 0 | 1.852781 | 2.23 × 10−05 | 0.244513 | 0.000346 | 0 |
| std | 0 | 2.49 × 10−06 | 0.390172 | 7.751756 | 1.403388 | 21.78618 | 0.064971 | 5.06 × 10−05 | |
| avg | 0 | 1.12 × 10−06 | 0.135026 | 10.24319 | 0.513367 | 7.46933 | 0.031283 | 1.72 × 10−05 | |
| median | 0 | 2.11 × 10−08 | 1.7 × 10−06 | 8.578803 | 0.043709 | 0.997865 | 0.023131 | 1.33 × 10−09 | |
| worse | 0 | 1.05 × 10−05 | 1.319029 | 40.33987 | 6.801991 | 118.7575 | 0.368195 | 0.000256 | |
| F7 | min | 0 | 0 | 2.5 × 10−118 | 0.616441 | 2.26 × 10−05 | 0.02437 | 7 × 10−05 | 3.7 × 10−214 |
| std | 0 | 0.001786 | 0.304532 | 4.882744 | 0.258574 | 58.11001 | 0.000579 | 8.65 × 10−06 | |
| avg | 2.5 × 10−279 | 0.000354 | 0.073356 | 5.604158 | 0.083544 | 56.92354 | 0.000628 | 1.74 × 10−06 | |
| median | 1.6 × 10−305 | 2.23 × 10−06 | 8.67 × 10−07 | 4.549893 | 0.011282 | 17.48157 | 0.000455 | 6.02 × 10−15 | |
| worse | 7.4 × 10−264 | 0.009806 | 1.623121 | 26.92456 | 1.215745 | 136.089 | 0.002573 | 4.74 × 10−05 | |
| F8 | min | 0 | 0 | 0 | 16.45564 | 0 | 5.18 × 10−15 | 0 | 0 |
| std | 0 | 0 | 0 | 77.82427 | 0 | 32.68747 | 0 | 0 | |
| avg | 0 | 0 | 0 | 78.08676 | 0 | 23.15519 | 0 | 0 | |
| median | 0 | 0 | 0 | 55.60085 | 0 | 20.72099 | 0 | 0 | |
| worse | 0 | 0 | 0 | 332.8596 | 0 | 184.3961 | 0 | 0 | |
| F9 | min | 0 | 8.2 × 10−148 | 3.2 × 10−307 | 0.011849 | 8.88 × 10−15 | 8.07 × 10−12 | 1.28 × 10−86 | 1.3 × 10−211 |
| std | 0 | 2.34 × 10−66 | 0 | 0.038802 | 0 | 1.33 × 10−10 | 1.62 × 10−15 | 0 | |
| avg | 0 | 4.27 × 10−67 | 1.2 × 10−166 | 0.057248 | 8.88 × 10−15 | 1.04 × 10−10 | 8.59 × 10−15 | 2.6 × 10−187 | |
| median | 0 | 1.07 × 10−81 | 6.3 × 10−270 | 0.046869 | 8.88 × 10−15 | 6.29 × 10−11 | 8.88 × 10−15 | 2.5 × 10−200 | |
| worse | 0 | 1.28 × 10−65 | 3.6 × 10−165 | 0.187565 | 8.88 × 10−15 | 6.8 × 10−10 | 8.88 × 10−15 | 7.8 × 10−186 | |
| F10 | min | 0 | 1.5 × 10−222 | 6.18 × 10−11 | 48.68945 | 48.91734 | 0.01106 | 0.000838 | 9.8 × 10−210 |
| std | 0 | 8.51 × 10−05 | 26.71263 | 0.277585 | 10.87702 | 10.38203 | 16.89705 | 0.00023 | |
| avg | 0 | 5.82 × 10−05 | 21.28953 | 49.33463 | 55.8605 | 48.04923 | 6.51828 | 8.46 × 10−05 | |
| median | 0 | 6.51 × 10−10 | 0.001958 | 49.29573 | 50.1522 | 48.37445 | 0.001947 | 3.16 × 10-07 | |
| worse | 0 | 0.000309 | 67.07167 | 49.82168 | 78.9468 | 75.79175 | 49.04756 | 0.00119 |
| Min | Std | Avg | Median | Worse | ||
|---|---|---|---|---|---|---|
| F1 | ISSA | 0 | 0 | 0 | 0 | 0 |
| SSA | 5.20 × 10−135 | 6.91 × 10−09 | 1.36 × 10−69 | 2.72 × 10−76 | 3.78 × 10−68 | |
| CASSA | 2.01 × 10−124 | 9.68 × 10−40 | 1.76 × 10−40 | 2.06 × 10−58 | 5.30 × 10−39 | |
| F2 | ISSA | 0 | 0 | 0 | 0 | 0 |
| SSA | 0 | 2.77 × 10−13 | 9.09 × 10−14 | 0 | 9.09 × 10−13 | |
| CASSA | 0 | 0 | 0 | 0 | 0 | |
| F3 | ISSA | 0 | 0 | 0 | 0 | 0 |
| SSA | 0 | 0 | 0 | 0 | 0 | |
| CASSA | 0 | 0 | 0 | 0 | 0 | |
| F4 | ISSA | 0 | 0 | 0 | 0 | 0 |
| SSA | 0 | 0 | 0 | 0 | 0 | |
| CASSA | 0 | 0 | 0 | 0 | 0 | |
| F5 | ISSA | 0 | 0 | 0 | 0 | 0 |
| SSA | 1.22 × 10−251 | 2.79 × 10−17 | 1.10 × 10−17 | 5.26 × 10−21 | 1.11 × 10−16 | |
| CASSA | 3.50 × 10−66 | 4.93 × 10−17 | 9.55 × 10−18 | 1.33 × 10−23 | 2.70 × 10−16 | |
| F6 | ISSA | 0 | 0 | 0 | 0 | 0 |
| SSA | 0 | 2.65 × 10−06 | 1.96 × 10−06 | 7.22 × 10−07 | 1.02 × 10−05 | |
| CASSA | 0 | 9.15 × 10−14 | 2.27 × 10−14 | 1.23 × 10−29 | 4.54 × 10−13 | |
| F7 | ISSA | 0 | 0 | 4.48 × 10−271 | 0 | 1.25 × 10−269 |
| SSA | 0 | 0.002619909 | 0.00070175 | 7.09231 × 10−07 | 0.010439418 | |
| CASSA | 9.53 × 10−150 | 4.38 × 10−20 | 8.56 × 10−21 | 3.64 × 10−38 | 2.40 × 10−19 | |
| F8 | ISSA | 0 | 0 | 0 | 0 | 0 |
| SSA | 0 | 0 | 0 | 0 | 0 | |
| CASSA | 0 | 0 | 0 | 0 | 0 | |
| F9 | ISSA | 0 | 0 | 1.69 × 10−299 | 0 | 5.07 × 10−298 |
| SSA | 0 | 4.78 × 10−65 | 8.99 × 10−66 | 8.61 × 10−87 | 2.62 × 10−64 | |
| CASSA | 7.65 × 10−120 | 3.94 × 10−43 | 7.19 × 10−44 | 1.64 × 10−66 | 2.15 × 10−42 | |
| F10 | ISSA | 0 | 0 | 0 | 0 | 0 |
| SSA | 3.10 × 10−96 | 0.000151407 | 9.89 × 10−05 | 5.72 × 10−11 | 0.000451946 | |
| CASSA | 2.74 × 10−138 | 1.29 × 10−15 | 2.36 × 10−16 | 2.56 × 10−63 | 7.10 × 10−15 |
| Min | Std | Avg | Median | Worse | ||
|---|---|---|---|---|---|---|
| F3 | NGOSSA | 0 | 0 | 0 | 0 | 0 |
| CirSSA | 0 | 0 | 0 | 0 | 0 | |
| LeySSA | 0 | 0 | 0 | 0 | 0 | |
| SSA | 0 | 3.60 × 10−32 | 6.57 × 10−33 | 0 | 1.97 × 10−31 | |
| ALSSA | 0 | 0 | 0 | 0 | 0 | |
| F4 | NGOSSA | 0 | 0 | 0 | 0 | 0 |
| CirSSA | 0 | 0 | 0 | 0 | 0 | |
| LeySSA | 0 | 0 | 0 | 0 | 0 | |
| SSA | 0 | 0 | 0 | 0 | 0 | |
| ALSSA | 0 | 0 | 0 | 0 | 0 | |
| F6 | NGOSSA | 0 | 5.58 × 10−06 | 2.26 × 10−06 | 9.84 × 10−08 | 2.34 × 10−05 |
| CirSSA | 0 | 4.42 × 10−06 | 2.35 × 10−06 | 1.49 × 10−08 | 1.81 × 10−05 | |
| LeySSA | 0 | 2.08 × 10−05 | 5.23 × 10−06 | 1.01 × 10−07 | 0.000114711 | |
| SSA | 3.37 × 10−05 | 0.000926195 | 0.00101274 | 0.000749823 | 0.003835879 | |
| ALSSA | 0 | 2.08 × 10−05 | 6.35 × 10−06 | 2.39 × 10−07 | 0.000113873 | |
| F8 | NGOSSA | 0 | 0 | 0 | 0 | 0 |
| CirSSA | 0 | 0 | 0 | 0 | 0 | |
| LeySSA | 0 | 0 | 0 | 0 | 0 | |
| SSA | 0 | 2.81 × 10−16 | 7.40 × 10−17 | 0 | 1.11 × 10−15 | |
| ALSSA | 0 | 0 | 0 | 0 | 0 | |
| F9 | NGOSSA | 5.33 × 10−168 | 6.37 × 10−63 | 1.16 × 10−63 | 1.44 × 10−92 | 3.49 × 10−62 |
| CirSSA | 0 | 3.65 × 10−70 | 6.66 × 10−71 | 8.79 × 10−94 | 2.00 × 10−69 | |
| LeySSA | 1.70 × 10−191 | 5.87 × 10−70 | 1.49 × 10−70 | 2.38 × 10−88 | 2.84 × 10−69 | |
| SSA | 6.02 × 10−40 | 6.84 × 10−15 | 3.55 × 10−15 | 3.82 × 10−35 | 2.66 × 10−14 | |
| ALSSA | 1.54 × 10−126 | 2.50 × 10−63 | 4.57 × 10−64 | 8.27 × 10−85 | 1.37 × 10−62 |
| Raster Map Name | Dimension | Number of Grids | Percentage of Obstacles | Number of Obstacle Grids |
|---|---|---|---|---|
| Raster map 4 | 20 × 20 | 400 | 20% | 80 |
| Raster map 5 | 30 × 30 | 900 | 20% | 180 |
| Raster map 6 | 40 × 40 | 1600 | 20% | 320 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Sang, B.; Zhang, Y. Application of Improved Sparrow Search Algorithm to Path Planning of Mobile Robots. Biomimetics 2024, 9, 351. https://doi.org/10.3390/biomimetics9060351
Xu Y, Sang B, Zhang Y. Application of Improved Sparrow Search Algorithm to Path Planning of Mobile Robots. Biomimetics. 2024; 9(6):351. https://doi.org/10.3390/biomimetics9060351
Chicago/Turabian StyleXu, Yong, Bicong Sang, and Yi Zhang. 2024. "Application of Improved Sparrow Search Algorithm to Path Planning of Mobile Robots" Biomimetics 9, no. 6: 351. https://doi.org/10.3390/biomimetics9060351
APA StyleXu, Y., Sang, B., & Zhang, Y. (2024). Application of Improved Sparrow Search Algorithm to Path Planning of Mobile Robots. Biomimetics, 9(6), 351. https://doi.org/10.3390/biomimetics9060351