

A Review and Evaluation of Control Architectures for Modular Legged and Climbing Robots





Abstract
1. Introduction
2. Classification of Modular Legged and Climbing Robots
2.1. Legged Robots
- Depending on the application and capabilities: walking or climbing robots.
- According to the leg structure: articulated legs (with and without wheels), orthogonal legs, pantograph legs, or telescopic legs (Table 1).
- According to the number of legs: monopod, biped, quadruped, hexapod, etc.
2.2. Climbing Robots
2.3. Modular Robots
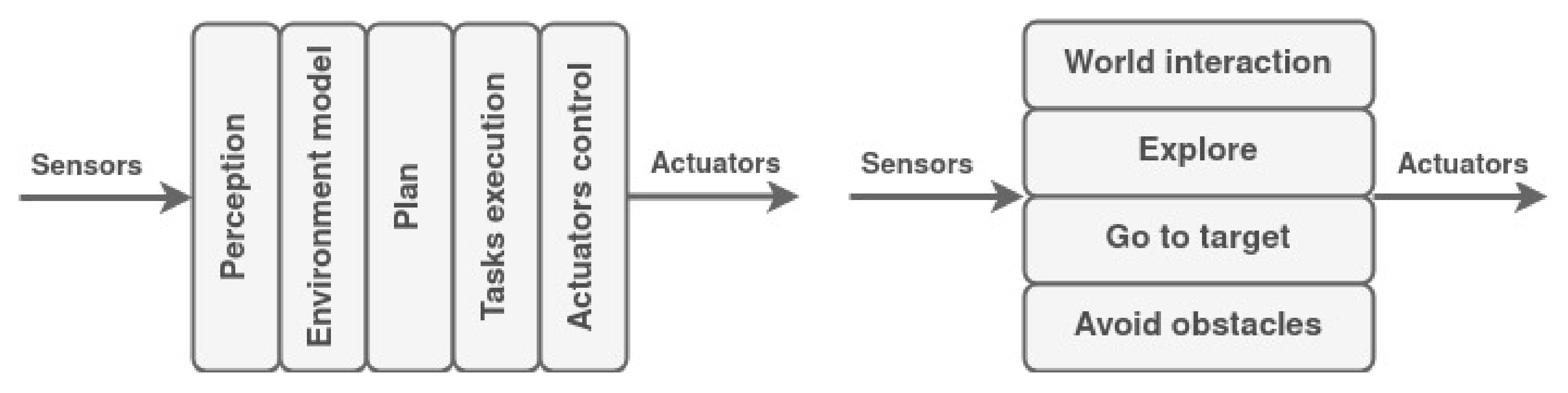
3. Robot Control Architectures
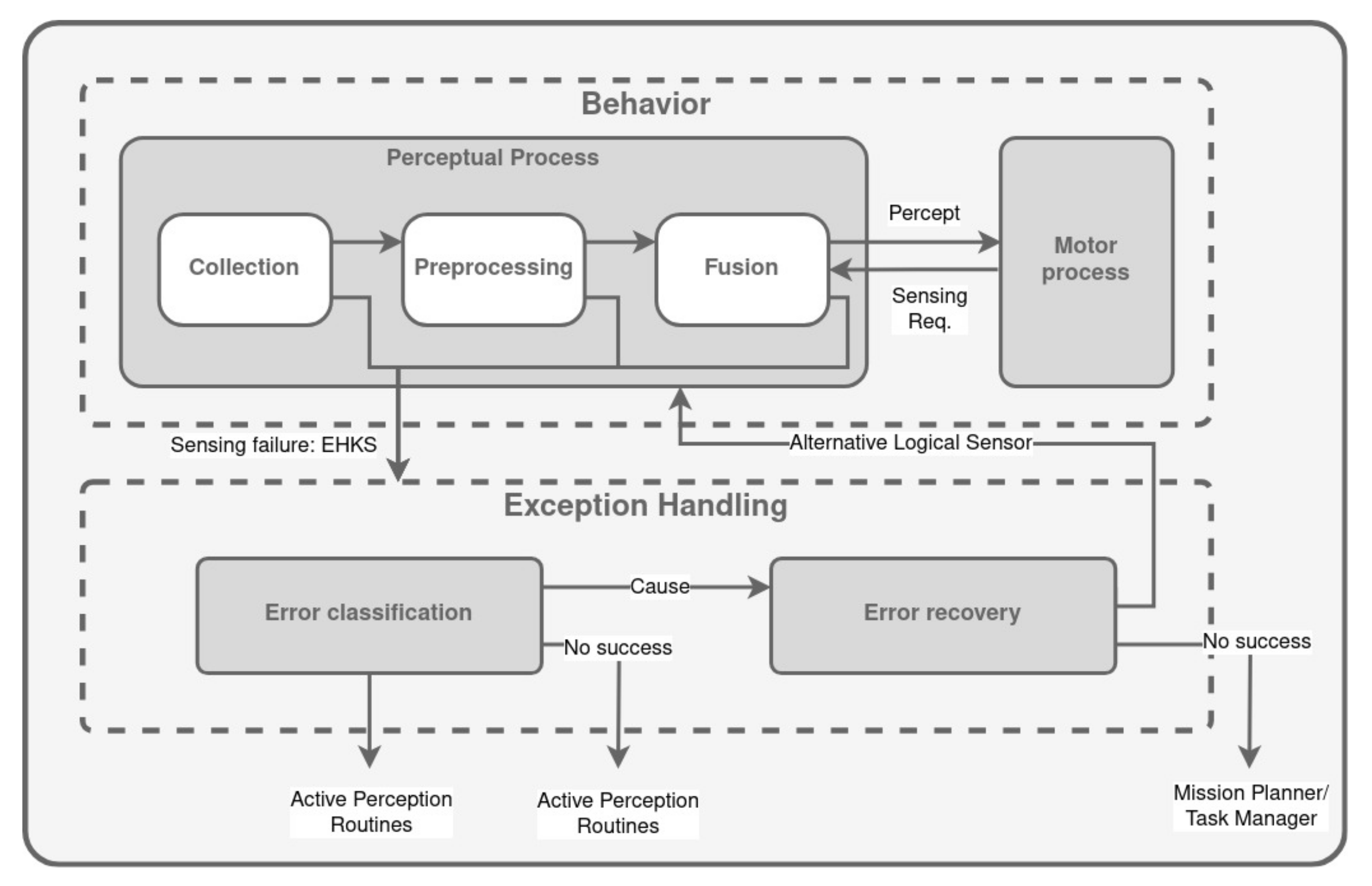
3.1. SFX-EH
- Error classification, which generates hypotheses about the underlying cause of the failure. It follows the following procedure: (a) generate all possible causes based on the symptom. (b) Order the list of associated tests and execute them to confirm any of these causes. (c) Terminate classification when all tests have been performed or an environmental change has been confirmed.
- Error recovery, which attempts to replace the logical sensor with an alternative. If there is no other option, the mission is deemed unsuccessful, and the robot planner is given control.
3.2. CIRCA
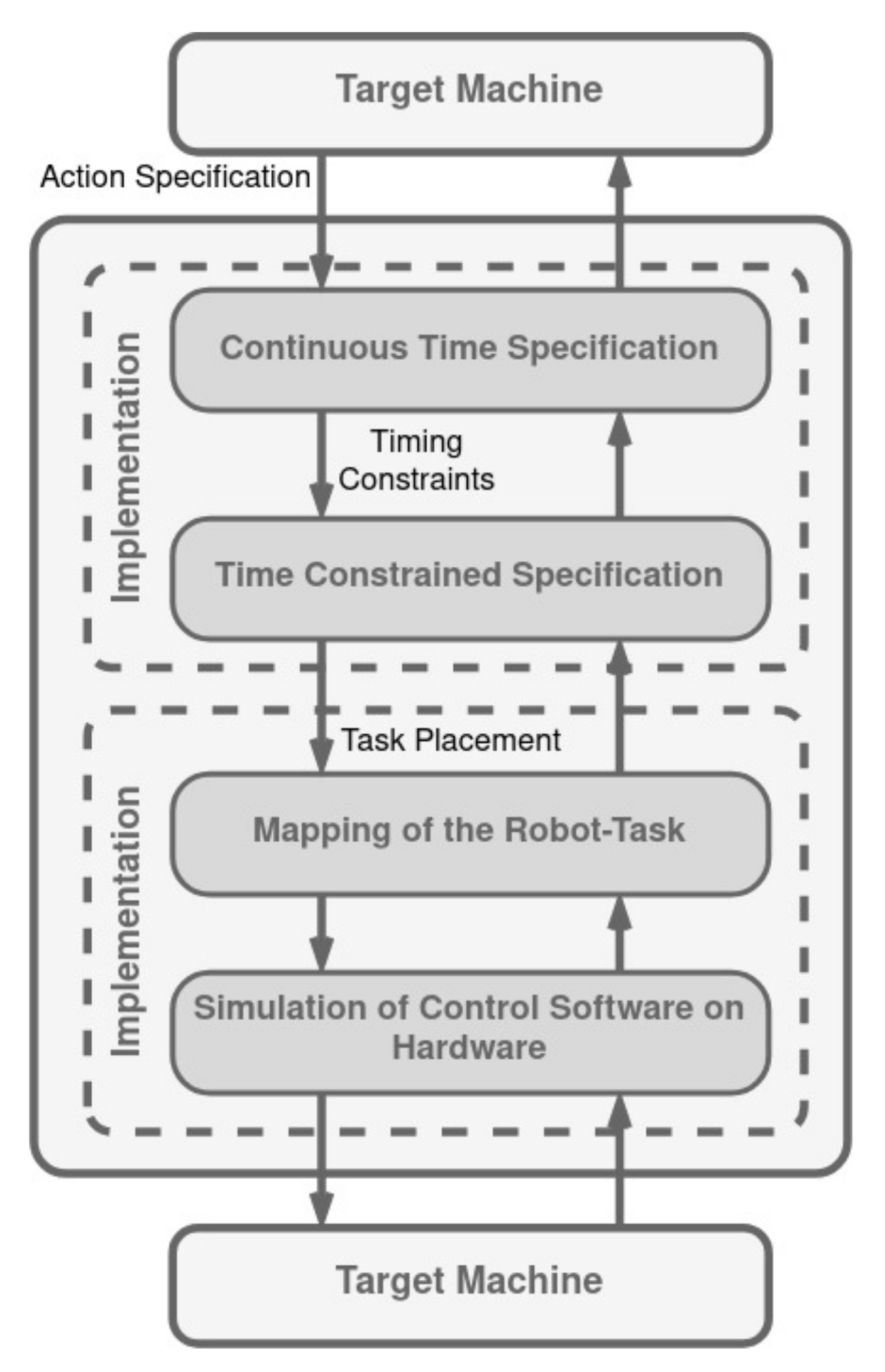
3.3. ORCCAD
- The Robot-task (RT). It represents an elementary robotic action, where automatic control aspects are predominant, although coherently merged with behavioral ones.
- The Robot-procedure (RP), which is a basic element where only behavioral aspects are considered.
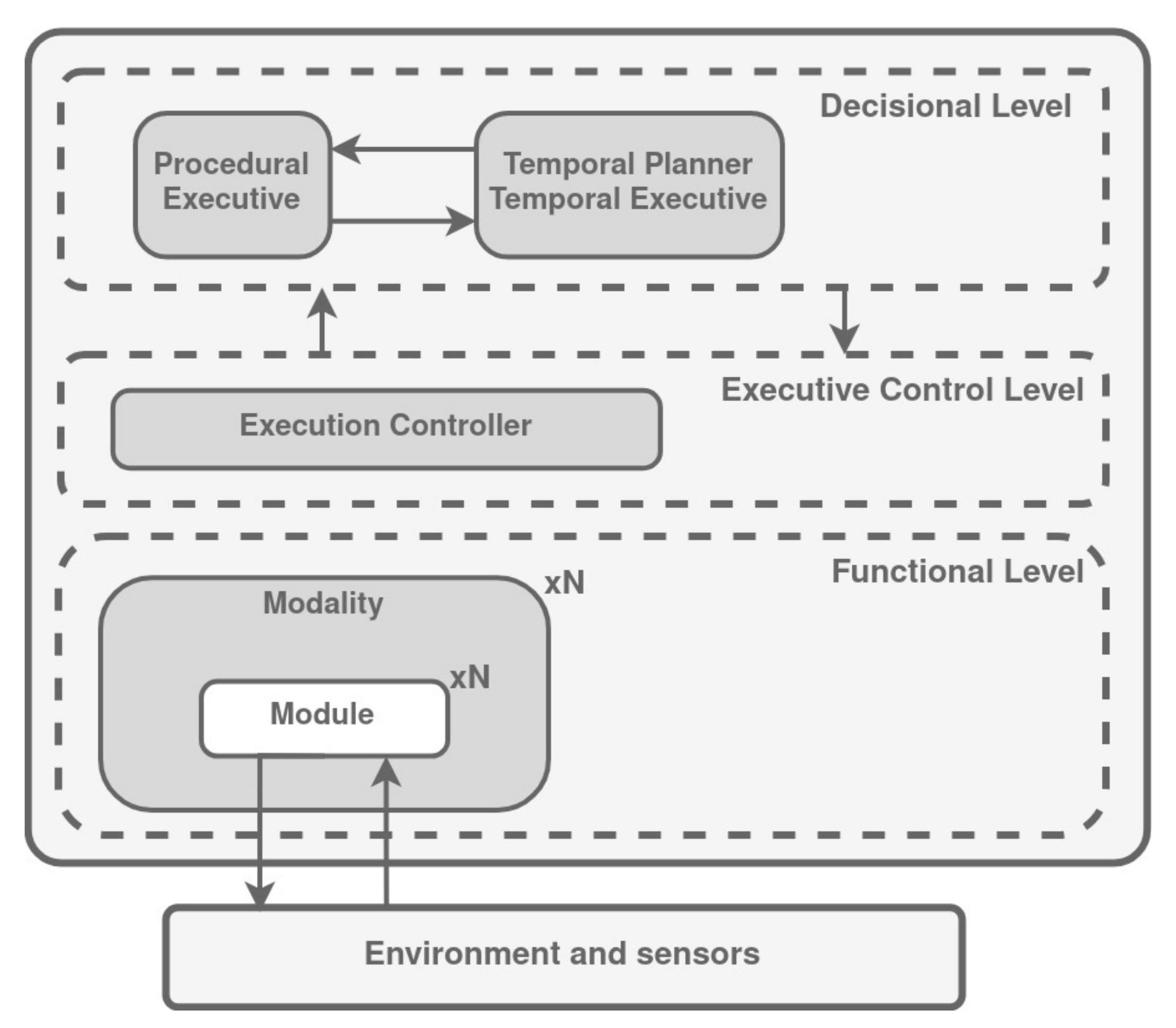
3.4. LAAS Architecture
- Functional level: it includes all basic built-in robot action and perception capabilities. These processing functions and control loops are encapsulated into controllable communication modules. Each module provides services which can be activated by the decisional level according to the current tasks, and exports posters containing data produced by the module and for others to use.
- Decisional level: this level includes the capacities of producing the task plan and supervising its execution, while being at the same time reactive to events from the functional level.
- Execution control level: it functions like the interface between the decisional and the functional levels. It controls the proper execution of the services according to safety constraints and rules and prevents functional modules from unforeseen interactions leading to catastrophic outcomes.
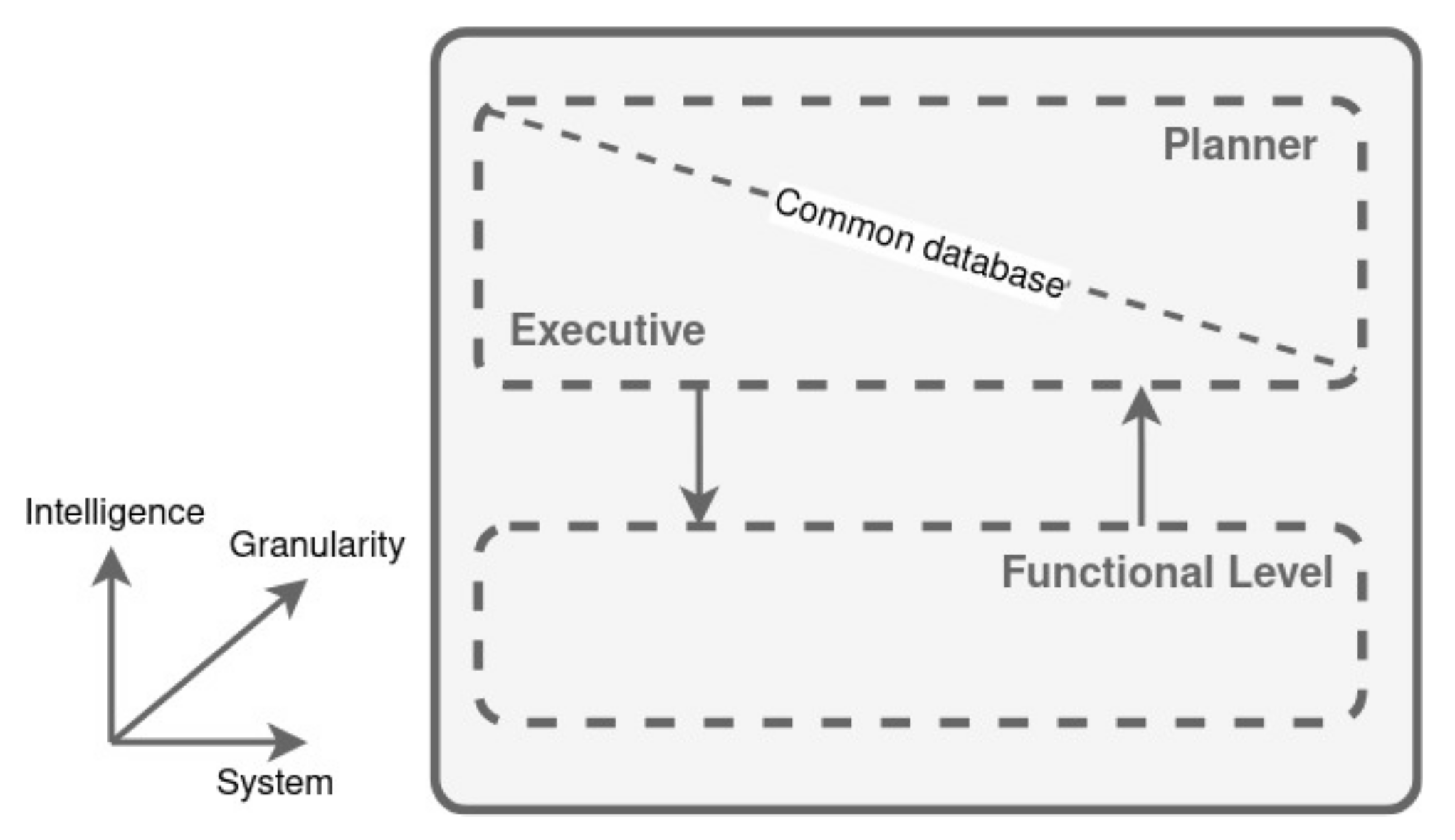
3.5. CLARAty
- A system with a very capable Decision Layer and a Functional Layer that provides only basic services.
- A system with a very limited Decision Layer that relies on a very capable Functional Layer to execute robustly given high-level commands.
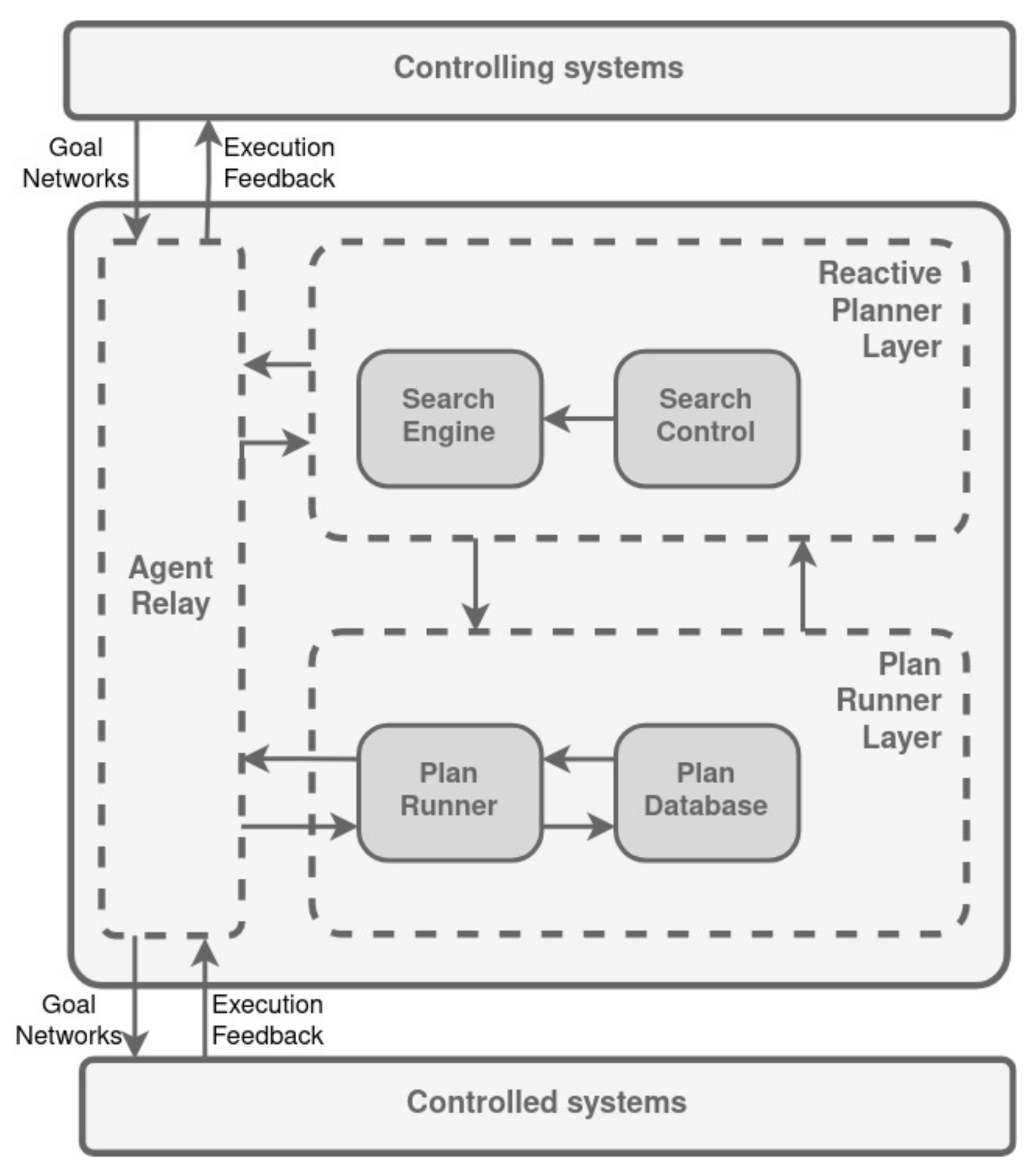
3.6. RA
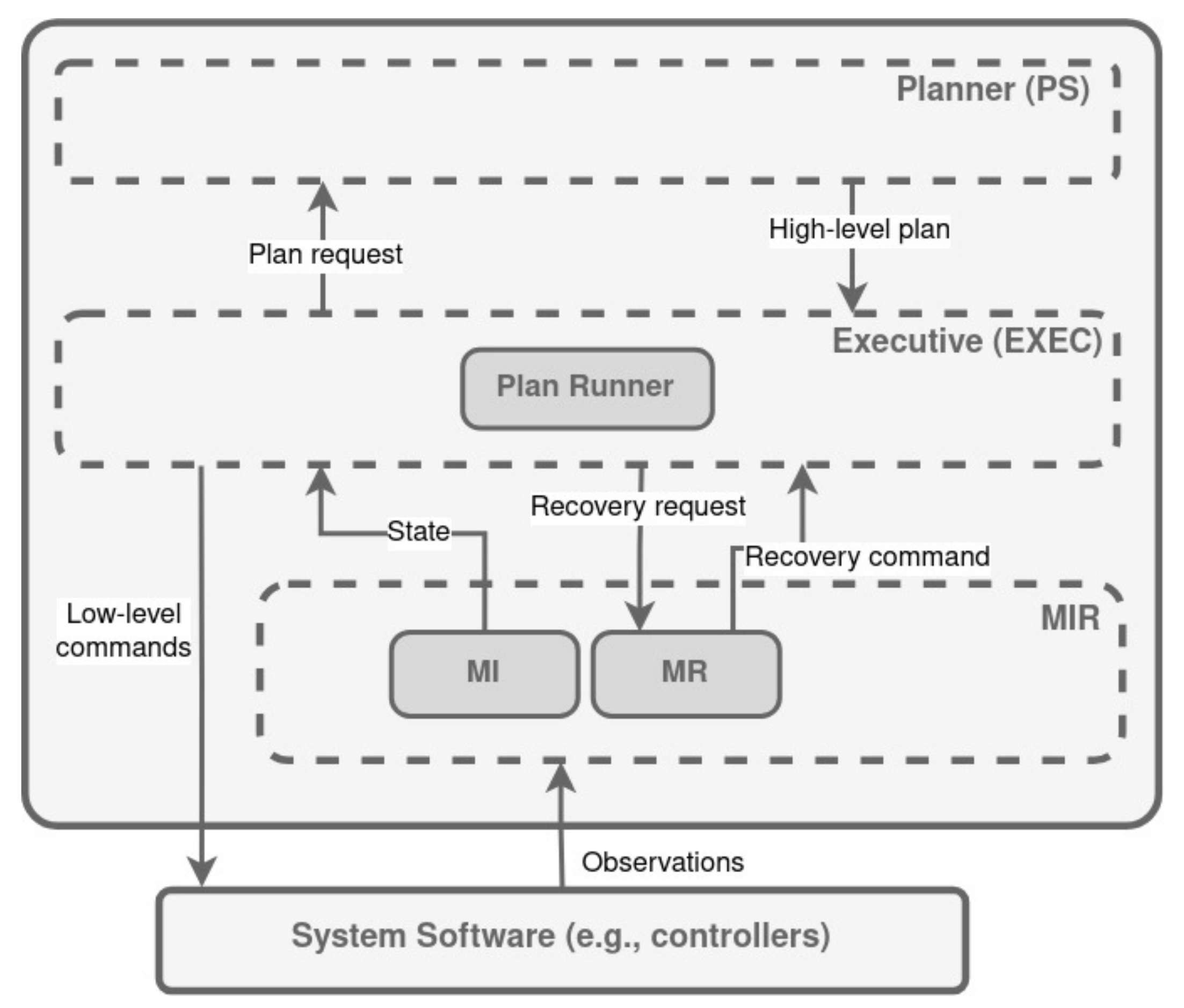
3.7. IDEA
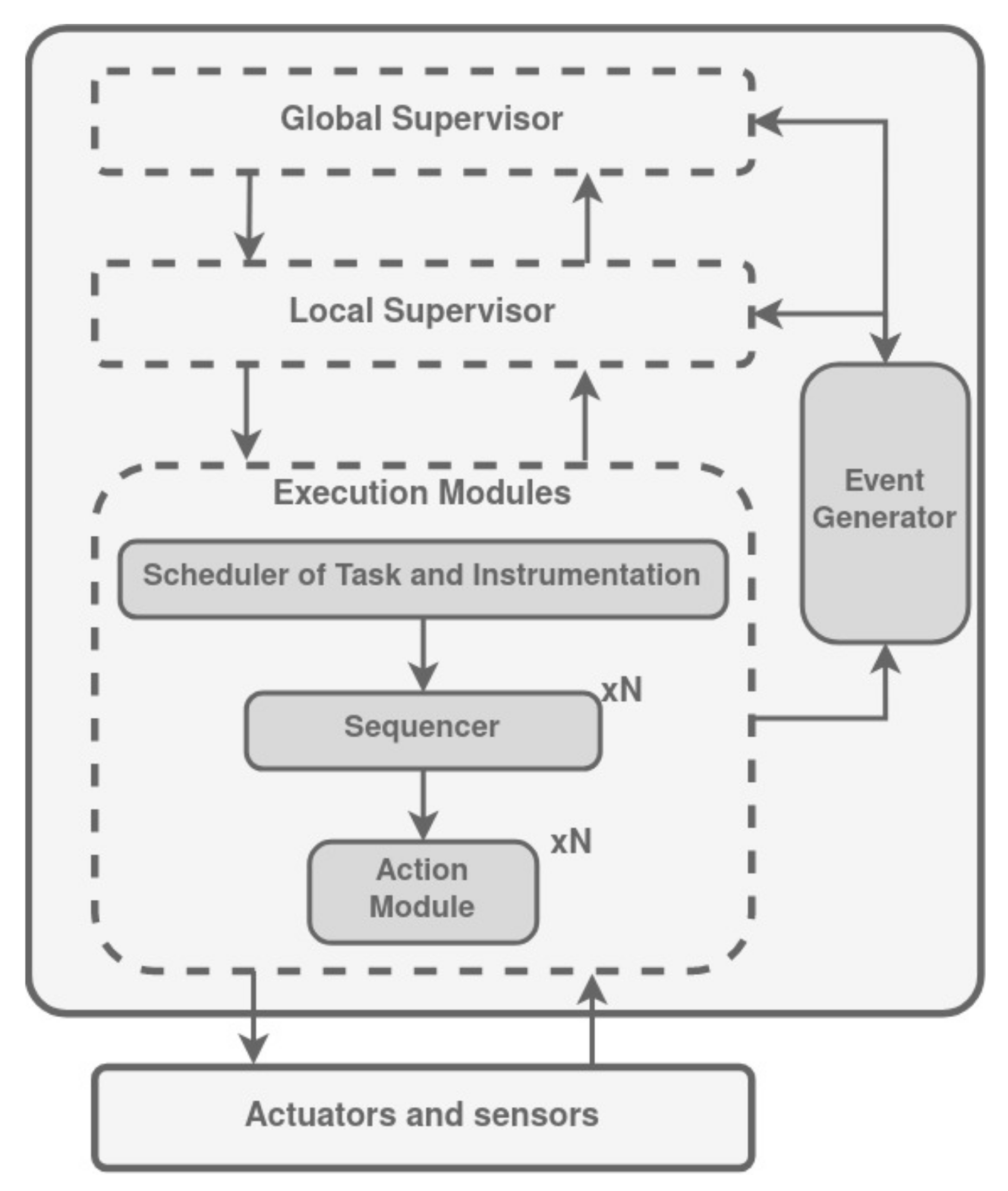
3.8. CMTI
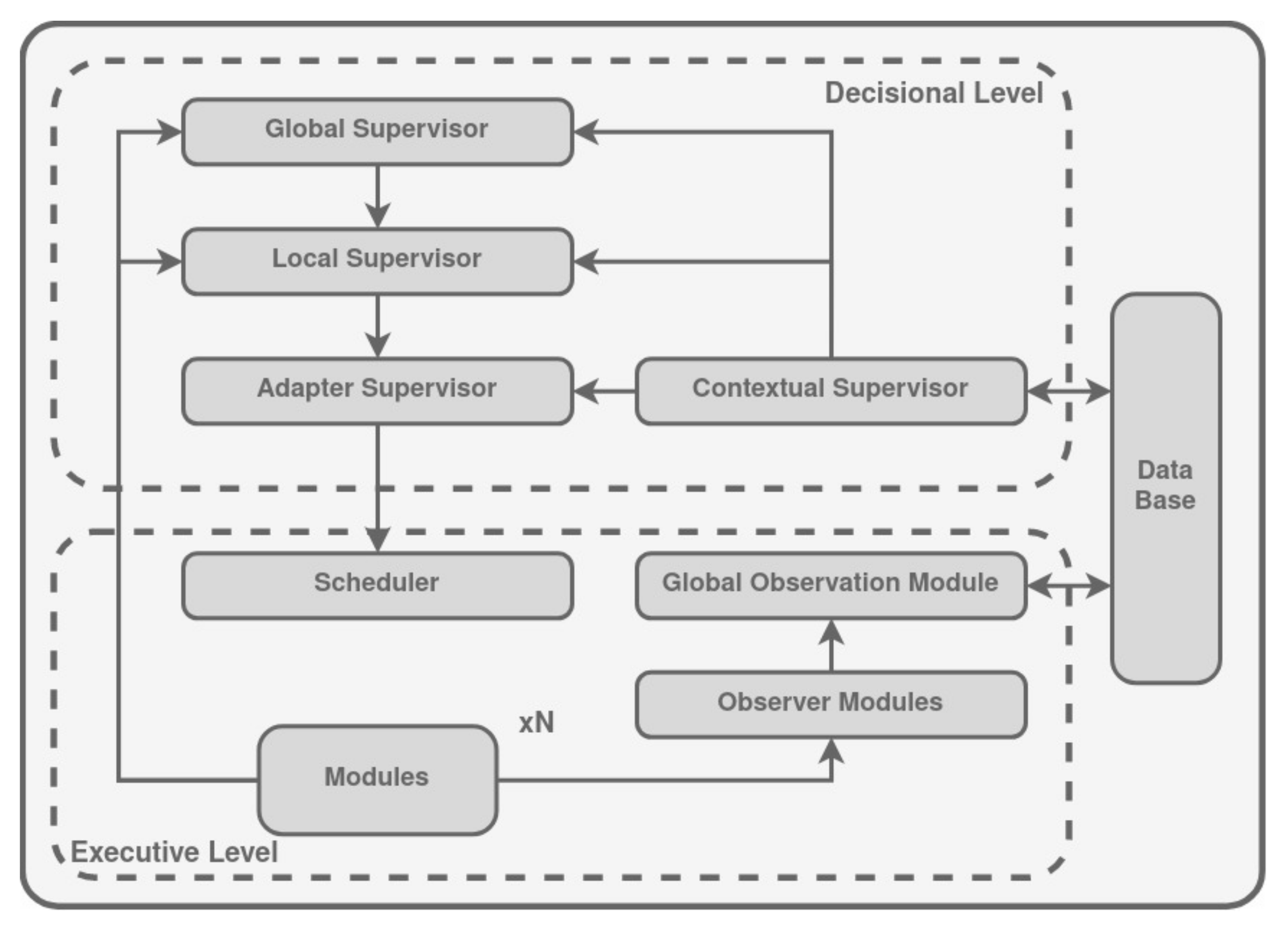
3.9. COTAMA
- Control modules, which embed robotic algorithms (e.g., path planning or a location system).
- Functional modules which implement specific functionalities (e.g., in/out ports).
- The specific Observer modules that implement fault detection.
3.10. ORCA
3.11. LAURON Control Architecture
3.12. Nimble Limbs Architecture
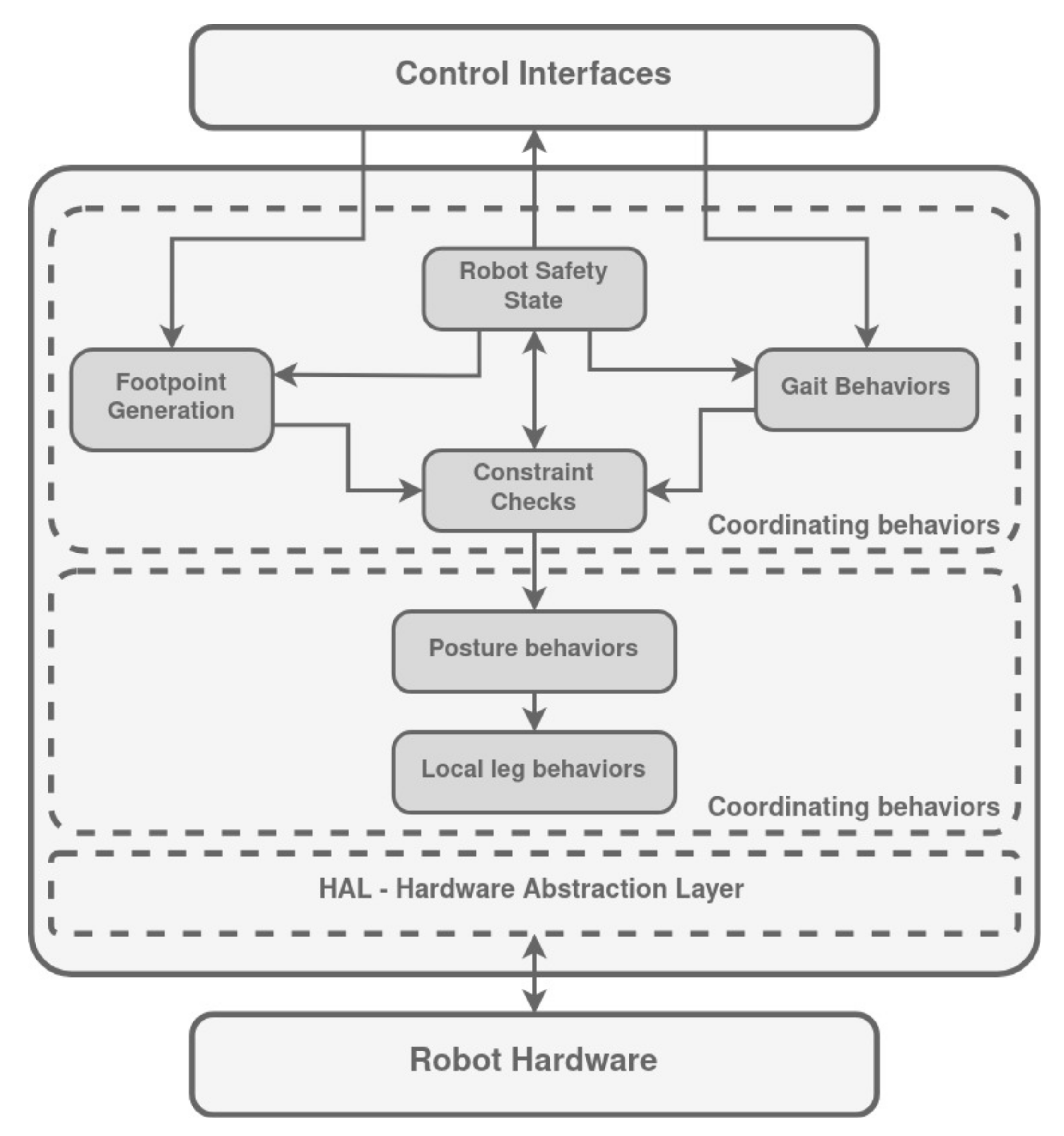
3.13. MoCLORA
- It seeks to imitate the behavior of animals, specifically those of legged insects.
- Modules support an intentional movement expressed by the body.
- The number of modules can be variable.
- The components of the robot can be replaced by virtual components (digital twin).
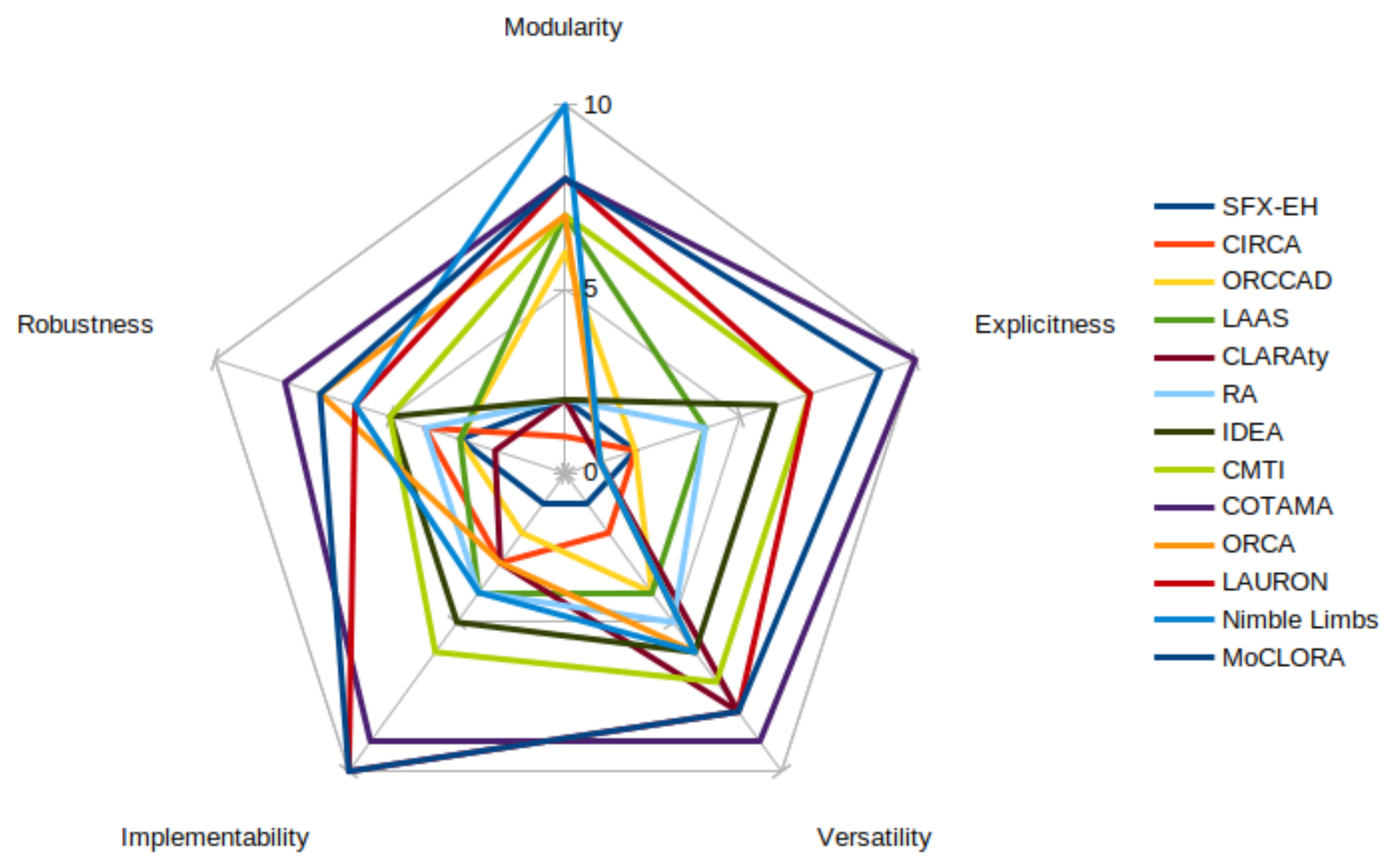
4. Comparative of the Control Architectures
- Modularity. It is the degree to which a system’s components may be separated and recombined, often with the benefit of flexibility and variety in use. An architecture that is qualified with 0 is considered to be extremely difficult to recombine in a modular way, whereas an architecture that is qualified with 10 is fully modularly designed and components can be placed, recombined, and flexibly used. An architecture qualified with a middle rating would be one in which some components can be reused, separated, and combined, but modularity is not the main objective of the architecture, or it fails in its implementation.
- Robustness. It is the ability to withstand or overcome adverse conditions or rigorous tests. An architecture qualified with 0 is considered to be weak under unexpected circumstances, whereas an architecture qualified with 10 is strong against failures and noise. For example, a legged robot can react to the loss of a joint and reconfigure itself to continue to be able to perform its intended tasks. An architecture qualified with 5 would be the one that overcomes a few of the unforeseen scenarios or attempts to cover many of them but fails in the attempt.
- Implementability. It is the quality of being implementable and the quality or condition of being plain or uncomplicated in form or design. An architecture that is qualified with 0 is considered extremely difficult or even impossible to implement into a real system, whereas an architecture that is qualified with 10 is easy and very intuitive to implement. An architecture qualified with 5 would be the one that allows the developer to implement some of the components, but the entire architecture is thought for a specific target and cannot be reused.
- Versatility. It is the ability to be adapted to many different functions or activities. An architecture that is qualified with 0 is considered extremely difficult to adapt to different applications and to include required features, whereas an architecture that is qualified with 10 is adaptable to all the needed functions. An architecture qualified with 5 would be the one that can be adapted to some specific tasks, but it fails to be implemented in a wide range of applications.
- Explicitness. It is the quality of being expressed without vagueness, implication, or ambiguity. An architecture that is qualified with 0 is considered to be ambiguous, and implementation details are not explained in depth, whereas an architecture that is qualified with 10 is well-detailed and very explicit. An architecture qualified with 5 would be the one that expresses some items in depth, but it does not go into detail in many others or does not include important implementation details.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Wooldridge, M. Intelligent agents. In Multiagent Systems; MIT Press: Cambridge, MA, USA, 1999; Volume 6. [Google Scholar]
- Jamroga, W.; Ågotnes, T. What agents can achieve under incomplete information. In Proceedings of the Fifth International Joint Conference on Autonomous Agents and Multiagent Systems, Hakodate, Japan, 8–12 May 2006; pp. 232–234. [Google Scholar] [CrossRef]
- Machado, J.T.; Silva, M.F. An overview of legged robots. In Proceedings of the International Symposium on Mathematical Methods in Engineering, Ankara, Turkey, 27–29 April 2006; MME Press: Cankaya, Ankara, Turkey, 2006; pp. 1–40. [Google Scholar]
- Katz, D.; Kenney, J.; Brock, O. How can robots succeed in unstructured environments. In Proceedings of the In Workshop on Robot Manipulation: Intelligence in Human Environments at Robotics: Science and Systems, 2008. [Google Scholar]
- Hernando, M.; Brunete, A.; Gambao, E. ROMERIN: A Modular Climber Robot for Infrastructure Inspection. IFAC-PapersOnLine 2019, 52, 424–429. [Google Scholar] [CrossRef]
- Brunete, A.; Ranganath, A.; Segovia, S.; de Frutos, J.; Hernando, M.; Gambao, E. Current trends in reconfigurable modular robots design. Int. J. Adv. Robot. Syst. 2017, 14, 1–21. [Google Scholar] [CrossRef]
- Zhuang, H.; Gao, H.; Deng, Z.; Ding, L.; Liu, Z. A review of heavy-duty legged robots. Sci. China Technol. Sci. 2014, 57, 298–314. [Google Scholar] [CrossRef]
- Roennau, A.; Heppner, G.; Nowicki, M.; Dillmann, R. LAURON V: A versatile six-legged walking robot with advanced maneuverability. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014. [Google Scholar] [CrossRef]
- Hutter, M.; Gehring, C.; Jud, D.; Lauber, A.; Bellicoso, C.D.; Tsounis, V.; Hwangbo, J.; Bodie, K.; Fankhauser, P.; Bloesch, M.; et al. ANYmal—A highly mobile and dynamic quadrupedal robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar] [CrossRef]
- Wilcox, B.H.; Litwin, T.; Biesiadecki, J.; Matthews, J.; Heverly, M.; Morrison, J.; Townsend, J.; Ahmad, N.; Sirota, A.; Cooper, B. ATHLETE: A cargo handling and manipulation robot for the moon. J. Field Robot. 2007, 24, 421–434. [Google Scholar] [CrossRef]
- Hernando, M.; Gambao, E.; Prados, C.; Brito, D.; Brunete, A. ROMERIN: A new concept of a modular autonomous climbing robot. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221123416. [Google Scholar] [CrossRef]
- Prados, C.; Hernando, M.; Gambao, E.; Brunete, A. ROMERIN: Organismo robótico escalador basado en patas modulares con ventosas activas. Rev. Iberoam. Autom. Inform. Ind. 2022, 20, 175–186. [Google Scholar] [CrossRef]
- Schwarz, M.; Rodehutskors, T.; Schreiber, M.; Behnke, S. Hybrid driving-stepping locomotion with the wheeled-legged robot Momaro. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5589–5595. [Google Scholar] [CrossRef]
- Smith, J.A.; Sharf, I.; Trentini, M. PAW: A hybrid wheeled-leg robot. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 4043–4048. [Google Scholar] [CrossRef]
- Bares, J.; Hebert, M.; Kanade, T.; Krotkov, E.; Mitchell, T.; Simmons, R.; Whittaker, W. Ambler: An autonomous rover for planetary exploration. Computer 1989, 22, 18–26. [Google Scholar] [CrossRef]
- Nabulsi, S.; Sarria, J.F.; Montes, H.; Armada, M.A. High-resolution indirect feet–ground interaction measurement for hydraulic-legged robots. IEEE Trans. Instrum. Meas. 2009, 58, 3396–3404. [Google Scholar] [CrossRef]
- Montes, H.; Mena, L.; Fernández, R.; Armada, M. Energy-efficiency hexapod walking robot for humanitarian demining. Ind. Robot. Int. J. 2017, 44, 457–466. [Google Scholar] [CrossRef]
- Tanaka, Y.; Shirai, Y.; Lin, X.; Schperberg, A.; Kato, H.; Swerdlow, A.; Kumagai, N.; Hong, D. Scaler: A tough versatile quadruped free-climber robot. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 5632–5639. [Google Scholar] [CrossRef]
- Spröwitz, A.T.; Tuleu, A.; Ajallooeian, M.; Vespignani, M.; Möckel, R.; Eckert, P.; D’Haene, M.; Degrave, J.; Nordmann, A.; Schrauwen, B.; et al. Oncilla robot: A versatile open-source quadruped research robot with compliant pantograph legs. Front. Robot. 2018, 5, 67. [Google Scholar] [CrossRef]
- Liang, C.; Ceccarelli, M.; Takeda, Y. Operation analysis of a Chebyshev-Pantograph leg mechanism for a single DOF biped robot. Front. Mech. Eng. 2012, 7, 357–370. [Google Scholar] [CrossRef]
- Hirose, S. The basic motion regulation system for quadruped walking vehicle. In Proceedings of the ASME Design Engineering Technical Conference, Lakeland, FL, USA, 26 March 1981. [Google Scholar]
- Hartikainen, K.K.; Halme, A.; Lehtinen, H.; Koskinen, K. MECANT I: A six legged walking machine for research purposes in outdoor environment. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; pp. 157–163. [Google Scholar] [CrossRef]
- Doosti, P.; Mahjoob, M.; Dadashzadeh, B. Finite-time control strategy for the running of a telescopic leg biped robot. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 196. [Google Scholar] [CrossRef]
- Kajita, S.; Matsumoto, O.; Saigo, M. Real-time 3D walking pattern generation for a biped robot with telescopic legs. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. no. 01ch37164), Seoul, Republic of Korea, 21–26 May 2001; Volume 3, pp. 2299–2306. [Google Scholar] [CrossRef]
- Roth, Z. Machines That Walk: The Adaptive Suspension Vehicle; Elsevier BV: Amsterdam, The Netherlands, 1990; Volume 25, p. 587. [Google Scholar] [CrossRef]
- Prados, C.; Hernando, M.; Gambao, E.; Brunete, A. MoCLORA—An Architecture for Legged-and-Climbing Modular Bio-Inspired Robotic Organism. Biomimetics 2022, 8, 11. [Google Scholar] [CrossRef] [PubMed]
- Grieco, J.; Prieto, M.; Armada, M.; de Santos, P.G. A six-legged climbing robot for high payloads. In Proceedings of the 1998 IEEE International Conference on Control Applications (Cat. No.98CH36104), Trieste, Italy, 4 September 1998. [Google Scholar] [CrossRef]
- Hernando, M.; Alonso, M.; Prados, C.; Gambao, E. Behavior-Based Control Architecture for Legged-and-Climber Robots. Appl. Sci. 2021, 11, 9547. [Google Scholar] [CrossRef]
- Irawan, A.; Razali, A.R.; Ishak, W.W.; Arshad, M.R.; Yin, T.Y. Development of hexaquad robot: Modeling and framework. Arpn J. Eng. Appl. Sci. 2015, 10, 17506–17513. [Google Scholar]
- Kim, H.; Kang, T.; Loc, V.G.; Choi, H.R. Gait planning of quadruped walking and climbing robot for locomotion in 3D environment. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2733–2738. [Google Scholar] [CrossRef]
- Kennedy, B.; Okon, A.; Aghazarian, H.; Badescu, M.; Bao, X.; Bar-Cohen, Y.; Chang, Z.; Dabiri, B.E.; Garrett, M.; Magnone, L.; et al. Lemur IIb: A robotic system for steep terrain access. Ind. Robot. Int. J. 2006, 33, 265–269. [Google Scholar] [CrossRef]
- Bandyopadhyay, T.; Steindl, R.; Talbot, F.; Kottege, N.; Dungavell, R.; Wood, B.; Barker, J.; Hoehn, K.; Elfes, A. Magneto: A Versatile Multi-Limbed Inspection Robot. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 2253–2260. [Google Scholar] [CrossRef]
- Peters, G.; Pagano, D.; Liu, D.; Waldron, K. A prototype climbing robot for inspection of complex ferrous structures. In Emerging Trends in Mobile Robotics; World Scientific Publishing Co Pte Ltd.: Singapore, 2010. [Google Scholar] [CrossRef]
- Waldron, K.; McGhee, R. The adaptive suspension vehicle. IEEE Control. Syst. Mag. 1986, 6, 7–12. [Google Scholar] [CrossRef]
- De Santos, P.G.; Cobano, J.A.; Garcia, E.; Estremera, J.; Armada, M. A six-legged robot-based system for humanitarian demining missions. Mechatronics 2007, 17, 417–430. [Google Scholar] [CrossRef]
- Jakimovski, B.; Meyer, B.; Maehle, E. Self-reconfiguring hexapod robot OSCAR using organically inspired approaches and innovative robot leg amputation mechanism. In Proceedings of the International Conference on Automation, Robotics and Control Systems, ARCS-09, Orlando, FL, USA, 13–16 July 2009. [Google Scholar]
- Kitano, S.; Hirose, S.; Horigome, A.; Endo, G. TITAN-XIII: Sprawling-type quadruped robot with ability of fast and energy-efficient walking. Robomech J. 2016, 3, 1–16. [Google Scholar] [CrossRef]
- Hutter, M.; Gehring, C.; Bloesch, M.; Hoepflinger, M.A.; Remy, C.D.; Siegwart, R. StarlETH: A compliant quadrupedal robot for fast, efficient, and versatile locomotion. In Adaptive Mobile Robotics; World Scientific: Singapore, 2012; pp. 483–490. [Google Scholar] [CrossRef]
- Dynamics, B. Spot—The Agile Mobile Robot. 2023. Available online: https://www.bostondynamics.com/products/spot (accessed on 22 April 2023).
- Buettner, T.; Heppner, G.; Roennau, A.; Dillmann, R. Nimble Limbs—Intelligent attachable legs to create walking robots from variously shaped objects. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019. [Google Scholar] [CrossRef]
- Nansai, S.; Mohan, R.E. A survey of wall climbing robots: Recent advances and challenges. Robotics 2016, 5, 14. [Google Scholar] [CrossRef]
- Dethe, R.D.; Jaju, S. Developments in wall climbing robots: A review. Int. J. Eng. Res. Gen. Sci. 2014, 2, 33–42. [Google Scholar]
- Miripour, B. Climbing and Walking Robots; IntechOpen: Rijeka, Croatia, 2010. [Google Scholar] [CrossRef]
- Brusell, A.; Andrikopoulos, G.; Nikolakopoulos, G. A survey on pneumatic wall-climbing robots for inspection. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 220–225. [Google Scholar] [CrossRef]
- Jian-yong, L.; Xiang-yan, L.; Yao-juan, Z.; Jing, Z. The development of rotation investigation wall-climbing robot. In Proceedings of the 2011 International Conference on Mechatronic Science, Electric Engineering and Computer (MEC), Jilin, China, 19–22 August 2011; pp. 632–635. [Google Scholar] [CrossRef]
- Nishi, A. A wall climbing robot using propulsive force of propeller. In Proceedings of the Fifth International Conference on Advanced Robotics ’Robots in Unstructured Environments, Pisa, Italy, 19–22 June 1991; Volume 1, pp. 320–325. [Google Scholar] [CrossRef]
- Zhou, Q.; Li, X. Experimental investigation on climbing robot using rotation-flow adsorption unit. Robot. Auton. Syst. 2018, 105, 112–120. [Google Scholar] [CrossRef]
- Tache, F.; Fischer, W.; Siegwart, R.; Moser, R.; Mondada, F. Compact magnetic wheeled robot with high mobility for inspecting complex shaped pipe structures. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 261–266. [Google Scholar] [CrossRef]
- Lee, G.; Wu, G.; Kim, J.; Seo, T. High-payload climbing and transitioning by compliant locomotion with magnetic adhesion. Robot. Auton. Syst. 2012, 60, 1308–1316. [Google Scholar] [CrossRef]
- Tavakoli, M.; Viegas, C.; Marques, L.; Pires, J.N.; de Almeida, A.T. OmniClimbers: Omni-directional magnetic wheeled climbing robots for inspection of ferromagnetic structures. Robot. Auton. Syst. 2013, 61, 997–1007. [Google Scholar] [CrossRef]
- Huang, H.; Li, D.; Xue, Z.; Chen, X.; Liu, S.; Leng, J.; Wei, Y. Design and performance analysis of a tracked wall-climbing robot for ship inspection in shipbuilding. Ocean. Eng. 2017, 131, 224–230. [Google Scholar] [CrossRef]
- Xu, F.; Wang, B.; Shen, J.; Hu, J.; Jiang, G. Design and realization of the claw gripper system of a climbing robot. J. Intell. Robot. Syst. 2018, 89, 301–317. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, S.; Wu, X.; Mei, T. A wheeled wall-climbing robot with bio-inspired spine mechanisms. J. Bionic Eng. 2015, 12, 17–28. [Google Scholar] [CrossRef]
- Unver, O.; Sitti, M. Tankbot: A Palm-size, Tank-like Climbing Robot using Soft Elastomer Adhesive Treads. Int. J. Robot. Res. 2010, 29, 1761–1777. [Google Scholar] [CrossRef]
- Seo, T.; Sitti, M. Tank-Like Module-Based Climbing Robot Using Passive Compliant Joints. IEEE/ASME Trans. Mechatron. 2013, 18, 397–408. [Google Scholar] [CrossRef]
- Kim, S.; Spenko, M.; Trujillo, S.; Heyneman, B.; Santos, D.; Cutkosky, M.R. Smooth vertical surface climbing with directional adhesion. IEEE Trans. Robot. 2008, 24, 65–74. [Google Scholar]
- Prahlad, H.; Pelrine, R.; Stanford, S.; Marlow, J.; Kornbluh, R. Electroadhesive robots—Wall climbing robots enabled by a novel, robust, and electrically controllable adhesion technology. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 3028–3033. [Google Scholar] [CrossRef]
- Gao, F.; Fan, J.; Zhang, L.; Jiang, J.; He, S. Magnetic crawler climbing detection robot basing on metal magnetic memory testing technology. Robot. Auton. Syst. 2020, 125, 103439. [Google Scholar] [CrossRef]
- Kim, H.; Kim, D.; Yang, H.; Lee, K.; Seo, K.; Chang, D.; Kim, J. Development of a wall-climbing robot using a tracked wheel mechanism. J. Mech. Sci. Technol. 2008, 22, 1490–1498. [Google Scholar] [CrossRef]
- Baghani, A.; Ahmadabadi, M.; Harati, A. Kinematics Modeling of a Wheel-Based Pole Climbing Robot (UT-PCR). In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar] [CrossRef]
- Alkalla, M.G.; Fanni, M.A.; Mohamed, A.M.; Hashimoto, S. Tele-operated propeller-type climbing robot for inspection of petrochemical vessels. Ind. Robot. Int. J. 2017, 44, 166–177. [Google Scholar] [CrossRef]
- Gambao, E.; Hernando, M.; Hernández, F.; Pinilla, E. Cost-Effective Robots for Façade Cleaning. In Proceedings of the 21st International Symposium on Automation and Robotics in Construction; International Association for Automation and Robotics in Construction (IAARC), Jeju, Republic of Korea, 21–25 September 2004. [Google Scholar] [CrossRef]
- Mir-Nasiri, N.; J, H.S.; Ali, M.H. Portable Autonomous Window Cleaning Robot. Procedia Comput. Sci. 2018, 133, 197–204. [Google Scholar] [CrossRef]
- Li, X.P.; Wang, X.; Feng, B. Modeling and control of a novel facade cleaning robot with four-ducted fan drive. Int. J. Adv. Robot. Syst. 2021, 18, 1729881420985721. [Google Scholar] [CrossRef]
- Yoshida, Y.; Ma, S. Design of a wall-climbing robot with passive suction cups. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; pp. 1513–1518. [Google Scholar] [CrossRef]
- Ge, D.; Ren, C.; Matsuno, T.; Ma, S. Guide rail design for a passive suction cup based wall-climbing robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 5776–5781. [Google Scholar] [CrossRef]
- Longo, D.; Muscato, G. The Alicia/sup 3/climbing robot: A three-module robot for automatic wall inspection. IEEE Robot. Autom. Mag. 2006, 13, 42–50. [Google Scholar] [CrossRef]
- Bisht, R.S.; Pathak, P.M.; Panigrahi, S.K. Design and development of a glass façade cleaning robot. Mech. Mach. Theory 2022, 168, 104585. [Google Scholar] [CrossRef]
- Andrikopoulos, G.; Papadimitriou, A.; Brusell, A.; Nikolakopoulos, G. On Model-based adhesion control of a vortex climbing robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1460–1465. [Google Scholar] [CrossRef]
- Peidró, A.; Tavakoli, M.; Marín, J.M.; Reinoso, Ó. Design of compact switchable magnetic grippers for the HyReCRo structure-climbing robot. Mechatronics 2019, 59, 199–212. [Google Scholar] [CrossRef]
- Prados Sesmero, C.; Buonocore, L.R.; Di Castro, M. Omnidirectional Robotic Platform for Surveillance of Particle Accelerator Environments with Limited Space Areas. Appl. Sci. 2021, 11, 6631. [Google Scholar] [CrossRef]
- Eto, H.; Asada, H.H. Development of a Wheeled Wall-Climbing Robot with a Shape-Adaptive Magnetic Adhesion Mechanism. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar] [CrossRef]
- Seriani, S.; Scalera, L.; Caruso, M.; Gasparetto, A.; Gallina, P. Upside-down robots: Modeling and experimental validation of magnetic-adhesion mobile systems. Robotics 2019, 8, 41. [Google Scholar] [CrossRef]
- Balaguer, C.; Pastor, J.; Giménez, A.; Padrón, V.; Abderrahim, M. ROMA: Multifunctional autonomous self-supported climbing robot for inspection applications. IFAC Proc. Vol. 1998, 31, 563–568. [Google Scholar] [CrossRef]
- Bevly, D.M.; Farritor, S.; Dubowsky, S. Action module planning and its application to an experimental climbing robot. In Proceedings of the 2000 ICRA. Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 4, pp. 4009–4014. [Google Scholar] [CrossRef]
- Kasem, H.; Tsipenyuk, A.; Varenberg, M. Biomimetic wall-shaped hierarchical microstructure for gecko-like attachment. Soft Matter 2015, 11, 2909–2915. [Google Scholar] [CrossRef] [PubMed]
- Kalouche, S.; Wiltsie, N.; Su, H.; Parness, A. Inchworm style gecko adhesive climbing robot. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2319–2324. [Google Scholar] [CrossRef]
- Xu, J.; Xu, L.; Liu, J.; Li, X.; Wu, X. Survey on Bioinspired Adhesive Methods and Design and Implementation of A Multi-Mode Biomimetic Wall-Climbing Robot. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 688–693. [Google Scholar] [CrossRef]
- Papadimitriou, A.; Andrikopoulos, G.; Nikolakopoulos, G. Development and control of a differential wall climbing robot based on vortex adhesion. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 1610–1615. [Google Scholar] [CrossRef]
- Koo, I.M.; Trong, T.D.; Lee, Y.H.; Moon, H.; Koo, J.; Park, S.K.; Choi, H.R. Development of wall climbing robot system by using impeller type adhesion mechanism. J. Intell. Robot. Syst. 2013, 72, 57–72. [Google Scholar] [CrossRef]
- Kang, T.; Kim, H.; Son, T.; Choi, H. Design of quadruped walking and climbing robot. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Las Vegas, NV, USA, 27–31 October 2003; Volume 1, pp. 619–624. [Google Scholar] [CrossRef]
- Parness, A.; Abcouwer, N.; Fuller, C.; Wiltsie, N.; Nash, J.; Kennedy, B. Lemur 3: A limbed climbing robot for extreme terrain mobility in space. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5467–5473. [Google Scholar] [CrossRef]
- Yim, M.; Zhang, Y.; Duff, D. Modular robots. IEEE Spectr. 2002, 39, 30–34. [Google Scholar] [CrossRef]
- Shen, Y.; Salemi, W.; Rus, B.; Moll, D.; Lipson, M. Modular self-reconfigurable robot systems. IEEE Robot. Autom. Mag. 2007, 14, 43–52. [Google Scholar]
- Ahmadzadeh, H.; Masehian, E.; Asadpour, M. Modular Robotic Systems: Characteristics and Applications. J. Intell. Robot. Syst. 2016, 81, 317–357. [Google Scholar] [CrossRef]
- Jorgensen, M.; Ostergaard, E.; Lund, H. Modular ATRON: Modules for a self-reconfigurable robot. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 2, pp. 2068–2073. [Google Scholar] [CrossRef]
- Humza, R.; Scholz, O.; Mokhtar, M.; Timmis, J.; Tyrrell, A. Towards Energy Homeostasis in an Autonomous Self-Reconfigurable Modular Robotic Organism. In Proceedings of the 2009 Computation World: Future Computing, Service Computation, Cognitive, Adaptive, Content, Patterns, Athens, Greece, 15–20 November 2009; pp. 21–26. [Google Scholar] [CrossRef]
- Shen, W.M.; Krivokon, M.; Chiu, H.; Everist, J.; Rubenstein, M.; Venkatesh, J. Multimode locomotion via SuperBot reconfigurable robots. Auton. Robot. 2006, 20, 165–177. [Google Scholar] [CrossRef]
- Qadir, R.H. Self-Sufficiency of an Autonomous Reconfigurable Modular Robotic Organism; Springer: Cham, Switzerland, 2015; Volume XV, 154p. [Google Scholar] [CrossRef]
- Chen, C.A.; Collins, T.; Shen, W.M. A near-optimal dynamic power sharing scheme for self-reconfigurable modular robots. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5183–5188. [Google Scholar] [CrossRef]
- Yim, M.; Duff, D.G.; Roufas, K.D. PolyBot: A modular reconfigurable robot. In Proceedings of the 2000 ICRA. Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 514–520. [Google Scholar] [CrossRef]
- Rus, D.; Vona, M. A physical implementation of the self-reconfiguring crystalline robot. In Proceedings of the 2000 ICRA. Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 1726–1733. [Google Scholar] [CrossRef]
- Murata, S.; Yoshida, E.; Kamimura, A.; Kurokawa, H.; Tomita, K.; Kokaji, S. M-TRAN: Self-reconfigurable modular robotic system. IEEE/ASME Trans. Mechatron. 2002, 7, 431–441. [Google Scholar] [CrossRef]
- Suh, J.; Homans, S.; Yim, M. Telecubes: Mechanical design of a module for self-reconfigurable robotics. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; pp. 4095–4101. [Google Scholar] [CrossRef]
- Zykov, V.; Chan, A.; Lipson, H. Molecubes: An open-source modular robotics kit. In Proceedings of the IROS-2007 Self-Reconfigurable Robotics Workshop, San Diego, CA, USA, 2 November 2007; pp. 3–6. [Google Scholar]
- Sprowitz, A.; Pouya, S.; Bonardi, S.; Kieboom, J.V.D.; Mockel, R.; Billard, A.; Dillenbourg, P.; Ijspeert, A.J. Roombots: Reconfigurable Robots for Adaptive Furniture. IEEE Comput. Intell. Mag. 2010, 5, 20–32. [Google Scholar] [CrossRef]
- Zhao, J.; Cui, X.; Zhu, Y.; Tang, S. A new self-reconfigurable modular robotic system UBot: Multi-mode locomotion and self-reconfiguration. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar] [CrossRef]
- Qiao, G.; Song, G.; Zhang, J.; Sun, H.; Wang, W.; Song, A. Design of transmote: A modular self-reconfigurable robot with versatile transformation capabilities. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012. [Google Scholar] [CrossRef]
- Liedke, J.; Matthias, R.; Winkler, L.; Worn, H. The Collective Self-reconfigurable Modular Organism (CoSMO). In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013. [Google Scholar] [CrossRef]
- Kee, V.; Rojas, N.; Elara, M.R.; Sosa, R. Hinged-Tetro: A self-reconfigurable module for nested reconfiguration. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014. [Google Scholar] [CrossRef]
- Wang, W.C.; Lu, Z.; Tsui, C.L. A design for autonomous self-building blocks. J. Reliab. Intell. Environ. 2019, 5, 115–128. [Google Scholar] [CrossRef]
- Tiwari, S.; Kazi, R.; Nambisan, A.; Jani, P. Morphius: A Self-configuring modular robot that navigates through cracks and debris for inspection. In Proceedings of the 21st International Conference on Distributed Computing and Networking, Kolkata, India, 4–7 January 2020. [Google Scholar] [CrossRef]
- Romanishin, J.; Bern, J.M.; Rus, D. Self-Reconfiguring Robotic Gantries Powered by Modular Magnetic Lead Screws. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 4225–4231. [Google Scholar] [CrossRef]
- Hayakawa, T.; Matsuno, F. Autonomous distributed system for single-legged modular robots to traverse environments by adaptive reconfiguration. Robot. Auton. Syst. 2022, 155, 104152. [Google Scholar] [CrossRef]
- Castano, A.; Behar, A.; Will, P.M. The Conro modules for reconfigurable robots. IEEE/ASME Trans. Mechatron. 2002, 7, 403–409. [Google Scholar] [CrossRef]
- Brunete, A.; Hernando, M.; Gambao, E. Modular Multiconfigurable Architecture for Low Diameter Pipe Inspection Microrobots. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 490–495. [Google Scholar] [CrossRef]
- Lyder, A.; Garcia, R.F.M.; Stoy, K. Mechanical design of odin, an extendable heterogeneous deformable modular robot. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 883–888. [Google Scholar] [CrossRef]
- Ryland, G.G.; Cheng, H.H. Design of iMobot, an intelligent reconfigurable mobile robot with novel locomotion. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar] [CrossRef]
- Wolfe, K.C.; Moses, M.S.; Kutzer, M.D.; Chirikjian, G.S. M3Express: A low-cost independently-mobile reconfigurable modular robot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar] [CrossRef]
- Pfotzer, L.; Ruehl, S.; Heppner, G.; Roennau, A.; Dillmann, R. KAIRO 3: A modular reconfigurable robot for search and rescue field missions. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014. [Google Scholar] [CrossRef]
- Pacheco, M.; Fogh, R.; Lund, H.H.; Christensen, D.J. Fable II: Design of a modular robot for creative learning. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar] [CrossRef]
- Hong, S.; Choi, D.; Kang, S.; Lee, H.; Lee, W. Design of manually reconfigurable modular manipulator with three revolute joints and links. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar] [CrossRef]
- Kim, J.; Alspach, A.; Yamane, K. Snapbot: A reconfigurable legged robot. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5861–5867. [Google Scholar] [CrossRef]
- Wang, M.; Su, Y.; Liu, H.; Xu, Y. WalkingBot: Modular Interactive Legged Robot with Automated Structure Sensing and Motion Planning. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020. [Google Scholar] [CrossRef]
- Spröwitz, A.; Moeckel, R.; Vespignani, M.; Bonardi, S.; Ijspeert, A. Roombots: A hardware perspective on 3D self-reconfiguration and locomotion with a homogeneous modular robot. Robot. Auton. Syst. 2014, 62, 1016–1033. [Google Scholar] [CrossRef]
- Gilpin, K.; Rus, D. Modular Robot Systems. IEEE Robot. Autom. Mag. 2010, 17, 38–55. [Google Scholar] [CrossRef]
- Kuipers, B.; Feigenbaum, E.A.; Hart, P.E.; Nilsson, N.J. Shakey: From Conception to History. AI Mag. 2017, 38, 88–103. [Google Scholar] [CrossRef]
- Murphy, R.; Arkin, R. Sfx: An Architecture For Action-oriented Sensor Fusion. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Raleigh, NC, USA, 7–10 July 1992; Volume 2, pp. 1079–1086. [Google Scholar] [CrossRef]
- Murphy, R.R.; Hershberger, D. Classifying and recovering from sensing failures in autonomous mobile robots. In Proceedings of the National Conference on Artificial Intelligence, Portland, Oregon, 4–8 August 1996; pp. 922–929. [Google Scholar]
- Musliner, D.J.; Durfee, E.H.; Shin, K.G. CIRCA: A cooperative intelligent real-time control architecture. IEEE Trans. Syst. Man, Cybern. 1993, 23, 1561–1574. [Google Scholar] [CrossRef]
- Simon, D.; Espiau, B.; Castillo, E.; Kapellos, K. Computer-aided design of a generic robot controller handling reactivity and real-time control issues. IEEE Trans. Control. Syst. Technol. 1993, 1, 213–229. [Google Scholar] [CrossRef]
- Borrelly, J.J.; Simon, D. Propositions d’architecture de contrôleur ouvert pour la robotique. In Rapports de Recherche; INRIA: Le Chesnay, France, 1990. [Google Scholar]
- CosteManiere, E.; Espiau, B.; Simon, D. Reactive objects in a task level open controller. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; pp. 2732–2733. [Google Scholar] [CrossRef]
- Espiau, B.; Kapellos, K.; Jourdan, M. Formal verification in robotics: Why and how? In Robotics Research; Springer: London, UK, 1996; pp. 225–236. [Google Scholar] [CrossRef]
- Alami, R.; Chatila, R.; Fleury, S.; Ghallab, M.; Ingrand, F. An architecture for autonomy. Int. J. Robot. Res. 1998, 17, 315–337. [Google Scholar] [CrossRef]
- Bensalem, S.; Gallien, M.; Ingrand, F.; Kahloul, I.; Nguyen, T.H. Toward a more dependable software architecture for autonomous robots. IEEE Robot. Autom. Mag. 2009, 16, 67–77. [Google Scholar] [CrossRef]
- Volpe, R.; Nesnas, I.; Estlin, T.; Mutz, D.; Petras, R.; Das, H. The CLARAty architecture for robotic autonomy. In Proceedings of the 2001 IEEE Aerospace Conference Proceedings (Cat. No. 01TH8542), Big Sky, MT, USA, 10–17 March 2001; Volume 1, pp. 1–121. [Google Scholar] [CrossRef]
- Muscettola, N.; Dorais, G.A.; Fry, C.; Levinson, R.; Plaunt, C.; Clancy, D. Idea: Planning at the core of autonomous reactive agents. In Proceedings of the Sixth International Conference on AI Planning and Scheduling, Toulouse, France, 23–27 April 2002. [Google Scholar]
- Bonasso, R.P.; Kortenkamp, D.; Miller, D.P.; Slack, M. Experiences with an architecture for intelligent, reactive agents. In Proceedings of the Intelligent Agents II Agent Theories, Architectures, and Languages: IJCAI’95 Workshop (ATAL), Montréal, QC, Canada, 19–20 August 1995; pp. 187–202. [Google Scholar] [CrossRef]
- Pell, B.; Bernard, D.E.; Chien, S.; Gat, E.; Muscettola, N.; Nayak, P.P.; Wagner, M.D.; Williams, B.C. Remote agent prototype for spacecraft autonomy. In Proceedings of the Space Sciencecraft Control and Tracking in the New Millennium, Denver, CO, USA, 6–8 August 1996; Volume 2810, pp. 74–90. [Google Scholar] [CrossRef]
- El Jalaoui, A.; Andreu, D.; Jouvencel, B. Contextual Management of Tasks and Instrumentation within an AUV control software architecture. In Proceedings of the IROS, Beijing, China, 9–15 October 2006; pp. 3761–3766. [Google Scholar] [CrossRef]
- El Jalaoui, A.; Andreu, D.; Jouvencel, B. A control architecture for contextual tasks management: Application to the AUV Taipan. In Proceedings of the Europe Oceans 2005, Brest, France, 20–23 June 2005; Volume 2, pp. 752–757. [Google Scholar] [CrossRef]
- Durand, B.; Godary-Dejean, K.; Lapierre, L.; Passama, R.; Crestani, D. Reliability improvement in control architecture for mobile robots: Implementation using COTAMA. In Proceedings of the CAR: Control Architectures of Robots, Wuhan, China, 6–7 March 2010. [Google Scholar]
- Durand, B.; Godary-Dejean, K.; Lapierre, L.; Passama, R.; Crestani, D. Fault tolerance enhancement using autonomy adaptation for autonomous mobile robots. In Proceedings of the 2010 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 6–8 October 2010; pp. 24–29. [Google Scholar] [CrossRef]
- Maas, R.; Maehle, E.; Großpietsch, K.E. Applying the organic robot control architecture ORCA to cyber-physical systems. In Proceedings of the 2012 38th Euromicro Conference on Software Engineering and Advanced Applications, Cesme, Turkey, 5–8 September 2012; pp. 250–257. [Google Scholar] [CrossRef]
- Larionova, S.; Jakimovski, B.; Auf, A.E.S.; Litza, M.; Moesch, F.; Maehle, E.; Brockmann, W. Toward a fault tolerant mobile robot: Mutual information for monitoring of the robot health status. In Proceedings of the International Workshop on Technical Challenges for Dependable Robots in Human Environments, 2007; pp. 1–5. [Google Scholar]
- Brockmann, W.; Maehle, E.; Grosspietsch, K.E.; Rosemann, N.; Jakimovski, B. ORCA: An organic robot control architecture. In Organic Computing—A Paradigm Shift for Complex Systems; Springer: Basel, Switzerland, 2011; pp. 385–398. [Google Scholar] [CrossRef]
- Maehle, E.; Brockmann, W.; Grosspietsch, K.E.; Auf, A.E.S.; Jakimovski, B.; Krannich, S.; Litza, M.; Maas, R.; Al-Homsy, A. Application of the organic robot control architecture ORCA to the six-legged walking robot OSCAR. In Organic Computing—A Paradigm Shift for Complex Systems; Springer: Basel, Switzerland, 2011; pp. 517–530. [Google Scholar] [CrossRef]
- Kerscher, T.; Roennau, A.; Ziegenmeyer, M.; Gassmann, B.; Zoellner, J.; Dillmann, R. Behaviour-based control of the six-legged walking machine Lauron IVc. In Advances In Mobile Robotics; World Scientific: Singapore, 2008; pp. 736–743. [Google Scholar] [CrossRef]
- Regenstein, K.; Kerscher, T.; Birkenhofer, C.; Asfour, T.; Zollner, M.; Dillmann, R. Universal Controller Module (UCoM)-component of a modular concept in robotic systems. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 2089–2094. [Google Scholar] [CrossRef]
- Murray IV, T.J.; Pham, B.N.; Pirjanian, P. Hardware Abstraction Layer for a Robot. US Patent 6,889,118, 3 May 2005. [Google Scholar]
- Prados, C.; Hernando, M.; Gambao, E.; Brunete, A. Torque-Based Control of a Bio-Inspired Modular Climbing Robot. Machines 2023, 11, 757. [Google Scholar] [CrossRef]
- Sesmero, C.P.; Lorente, S.V.; Castro, M.D. Graph SLAM Built over Point Clouds Matching for Robot Localization in Tunnels. Sensors 2021, 21, 5340. [Google Scholar] [CrossRef] [PubMed]
- Murphy, R.R.; Hershberger, D. Handling sensing failures in autonomous mobile robots. Int. J. Robot. Res. 1999, 18, 382–400. [Google Scholar] [CrossRef]
- The Old Robots Web Site. Heathkit Hero 2000. 2022. Available online: http://www.theoldrobots.com/hero2k.html (accessed on 18 September 2023).
- Jourdan, M. Integrating formal verification methods of quantitative real-time properties into a development environment for robot controllers. In Rapport de Recherche-Institut National de Recherche en Informatique et en Automatique; INRIA: Le Chesnay, France, 1995. [Google Scholar]
- Verimag. Dala Robot. 2022. Available online: https://www-verimag.imag.fr/Dala-Robot.html (accessed on 22 April 2023).
- Openrobots. iRobot ATRV Platform. 2022.
- Kawada Industries; AIST. HRP-2. 2002. Available online: https://robots.ieee.org/robots/hrp2/ (accessed on 22 April 2023).
- Clodic, A.; Fleury, S.; Alami, R.; Chatila, R.; Bailly, G.; Brethes, L.; Cottret, M.; Danes, P.; Dollat, X.; Elisei, F.; et al. Rackham: An interactive robot-guide. In Proceedings of the ROMAN 2006-the 15th IEEE International Symposium on Robot and Human Interactive Communication, Hatfield, UK, 6–8 September 2006; pp. 502–509. [Google Scholar] [CrossRef]
- LAAS. Jido. 2022. Available online: http://www.laas.fr/robots/jido/data/en/jido.php (accessed on 22 April 2023).
- NASA Jet Propulsion Laboratory. PDM: Planetary Dexterous Manipulators. 2022. Available online: https://www-robotics.jpl.nasa.gov/what-we-do/research-tasks/pdm-planetary-dexterous-manipulators/ (accessed on 22 January 2021).
- Das, H.; Bao, X.; Bar-Cohen, Y.; Bonitz, R.; Lindemann, R.A.; Maimone, M.; Nesnas, I.A.; Voorhees, C.J. Robot manipulator technologies for planetary exploration. In Proceedings of the Smart Structures and Materials 1999: Smart Structures and Integrated Systems. International Society for Optics and Photonics; 1999; Volume 3668, pp. 175–182. [Google Scholar]
- Volpe, R.; Balaram, J.; Ohm, T.; Ivlev, R. The rocky 7 mars rover prototype. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS’96, Osaka, Japan, 8 November 1996; Volume 3, pp. 1558–1564. [Google Scholar] [CrossRef]
- NASA Jet Propulsion Laboratory. JPL Robotics: The Rocky 8 Rover. 2003. Available online: https://www-robotics.jpl.nasa.gov/how-we-do-it/systems/the-rocky-8-rover/ (accessed on 18 September 2023).
- NASA. Deep Space 1. 1998. Available online: https://www.jpl.nasa.gov/missions/deep-space-1-ds1 (accessed on 23 April 2023).
- Durand, B.; Godary-Dejean, K.; Lapierre, L.; Passama, R.; Crestani, D. Using adaptive control architecture to enhance mobile robot reliability. In Proceedings of the TAROS 2010-11th Annual Conference Towards Autonomous Robotic Systems, Plymouth, UK, 31 August–2 September 2010; pp. 54–61. [Google Scholar]
- Yi, S.J.; Lee, D.D. Dynamic heel-strike toe-off walking controller for full-size modular humanoid robots. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 395–400. [Google Scholar] [CrossRef]
- Park, I.W.; Kim, J.Y.; Oh, J.H. Online biped walking pattern generation for humanoid robot khr-3 (kaist humanoid robot-3: Hubo). In Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 398–403. [Google Scholar] [CrossRef]
- Vladareanu, V.; Boscoianu, C.; Munteanu, R.I.; Yu, H.; Vladareanu, L. Dynamic control of a walking robot using the versatile intelligent portable robot platform. In Proceedings of the 2015 20th International Conference on Control Systems and Computer Science, Bucharest, Romania, 27–29 May 2015; pp. 38–45. [Google Scholar] [CrossRef]
- Fankhauser, P.; Bellicoso, C.D.; Gehring, C.; Dubé, R.; Gawel, A.; Hutter, M. Free gait—An architecture for the versatile control of legged robots. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 1052–1058. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Sketch | Advantages | Disadvantages | Examples |
|---|---|---|---|---|
| Articulated leg |  | High maneuverability and flexibility | Reverse articulated torque under the unreasonable walking way | LAURON V [8], ANYmal [9], ATHLETE [10], ROMERIN [11,12] |
 | High maneuverability, high mobile speed, and high energy efficiency | Reverse articulated torque under the unreasonable walking way, difficult to control, and low versatility | Momaro [13], PAW [14] | |
| Orthogonal leg |  | Gravity decoupling | Low flexibility | Ambler [15], ROBOCLIMBER [16], H. Montes hexapod [17] |
| Pantograph leg |  | The horizontal and vertical motions are decoupled | High peak power requirements | SCALER [18], Oncilla [19], LARM [20], PV-II [21], MECANT I [22] |
| Telescopic leg |  | Compact structure | Low energy efficiency | Mainly for biped robots [23,24] |
| Robot | Mechanically Homogeneous | Intramodule Communication | Power Sharing | Decentralized Control | Self-Configuring |
|---|---|---|---|---|---|
| ine Polybot | |||||
| ine Crystalline | |||||
| ine Conro | |||||
| ine M-TRAN | |||||
| ine Telecube | |||||
| ine ATRON | |||||
| ine Microtub | |||||
| ine Superbot | |||||
| ine Molecubes | |||||
| ine Odin | |||||
| ine Roombot | |||||
| ine iMOBOT | |||||
| ine Ubot | |||||
| ine Transmote | |||||
| ine M3 Express | |||||
| ine CoSMO | |||||
| ine Kairo 3 | |||||
| ine Hinged-Tetro | |||||
| ine Fable II | |||||
| ine TR:R | |||||
| ine Ani-Bot | |||||
| ine Snapbot | |||||
| ine SB blocks | |||||
| ine NL | |||||
| ine Morphius | |||||
| ine WalkingBot | |||||
| ine MLS | |||||
| ine KARAKASA | |||||
| ine ROMERIN |
| Name | Applications | Analysis | Year | Number of Layers |
|---|---|---|---|---|
| SFX-EH | Sensor fusion and failure detection on robots, such as Clementine 2 [144] | It requires only a partial causal model of sensing failure, and the control scheme strives for a fast response. However, it is (a) an old architecture with obsolete approaches, (b) only applicable to sensor failure treatments, and (c) difficult to implement on a high scale and in complex systems with the objective of robustness and fault tolerance. It has a lack of fault handling in many situations and high limitations in new control systems. | 1992 | 2 |
| CIRCA | Heathkit Hero 2000 [145] | It is an approach focused mainly on control-level goals, not on task-level goals. It is thought to produce a precise, high-confidence response in a timely fashion to a limited set of inputs. Thus, the environment and the problem should be well-known and defined. | 1993 | 3 |
| ORCCAD | Autonomous vehicles [146] | There are two different types of modules, RT performs the task and RP defines the interface of RT. It contemplates error types and simple fault tolerance techniques. However, as well as ORCA, the complexity of the system may increase exponentially with new fault tolerance techniques, while the organization structure may become untenable. | 1996 | 2 1 |
| LAAS | DALA [147], iRobot ATRV [148], HRP2 [149], Rackham [150], Jido [151] | Similarly to CMTI, the division in three layers, where the middle one ensures the system safety, improves the robustness. However, it is very open, where it is the user who has to apply more fault tolerance techniques. | 1998 | 3 |
| CLARAty | PDM [152,153], Rocky 7 [154] and 8 [155] | The suppression of a layer increases the granularity as a third dimension. However, the tasks of the executive and planner are fuzzy. It gives more freedom to the researcher but less control architecture definition. | 2001 | 2 |
| RA | Deep Space 1 [156] | Thought for planned tasks, where the main planner is a state machine with predefined actions. | 2002 | 3 |
| IDEA | Deep Space 1, spacecrafts [156] | Improvement of RA through the use of tokens. It combines reactive and deliberative control, depending on the problem scope, giving more robustness than RA. | 2002 | 3 |
| CMTI | AUV TAIPAN [132] | Good architecture for improving with fault tolerance mechanisms. The structure is simple, but it covers a high amount of situations. | 2006 | 3 |
| COTAMA | Mobile robots [157] | Complex architecture that covers a huge quantity of situations and problems, becoming the most fault-tolerant architecture included in this article. It includes the capabilities of ORCA (with the addition of observer modules) and CMTI, but it improves reliability and robustness respecting the others. | 2010 | 2 |
| ORCA | OSCAR [36] | The idea of dualizing the modules covers a large amount of problems, however, the complexity of the system may increase exponentially with fault tolerance techniques implementation (which are not contemplated in the architecture), while the organization structure may become untenable. | 2012 | Non defined |
| LAURON | LAURON IV [139], LAURON V [8] | It is a good approach thought for legged robots with a variable number of legs. It contemplates all the features of the walking process, however, it does not do so for external perturbations. | 2014 | 3 |
| Nimble Limbs | Nimble Limbs system [40] | It proposes a decentralized control with a variable number of legs, but it is still preliminary and it has not been tested in a physical system to validate its behavior. It is simple, and in this way, it does not contemplate many scenarios, or communication details and also does not go into implementation details. | 2019 | 2 |
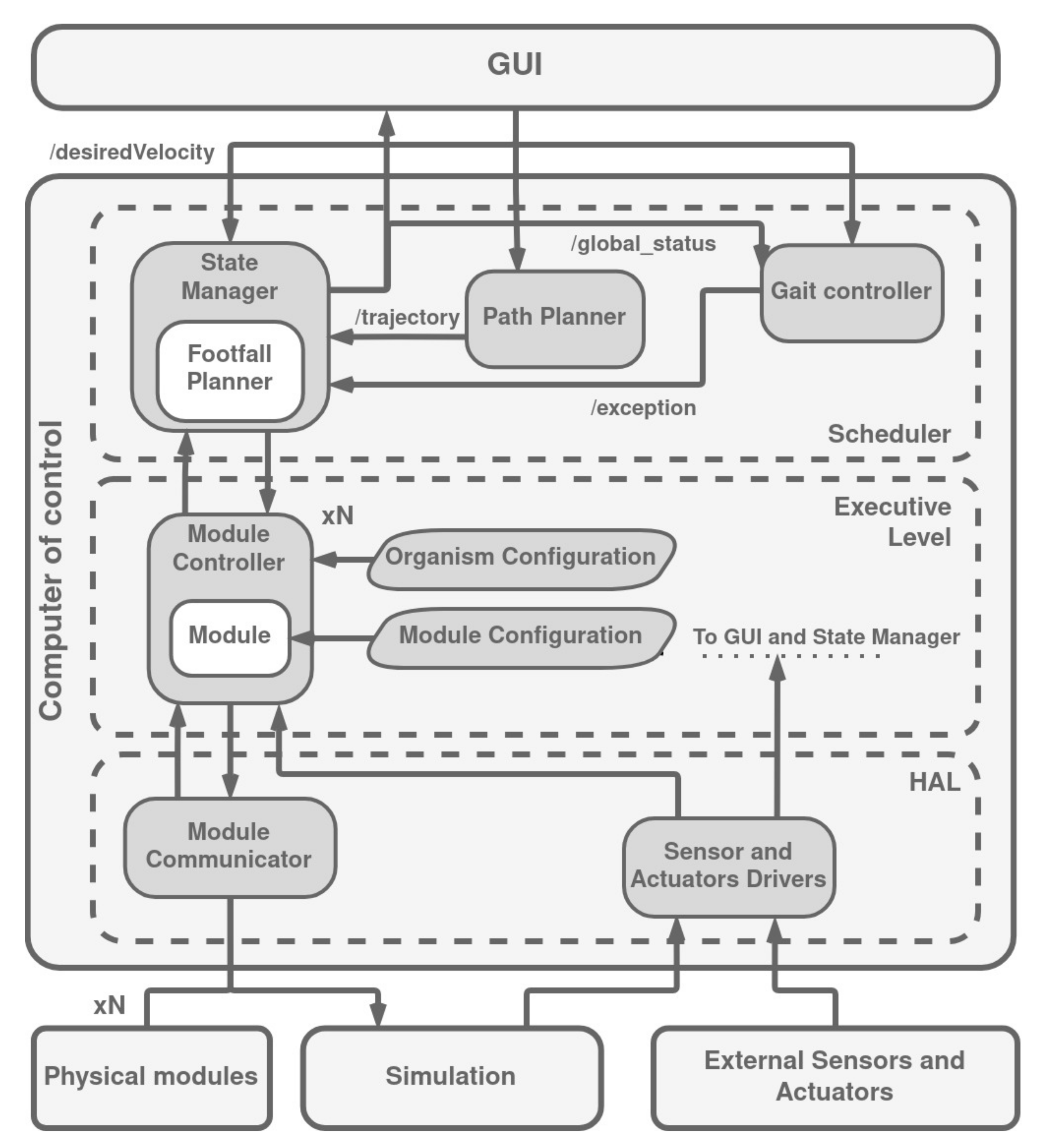
| MoCLORA | ROMERIN [26] | It proposed an approach to control modular legged robots, including a torque-based control for the position and velocity control for the robot body and legs. It includes leg coordination, state estimation, gait controller, path and footfall planning, and collision avoidance. | 2023 | 3 |
| Name | Modularity | Robustness | Implementability | Versatility | Explicitness |
|---|---|---|---|---|---|
| SFX-EH | 2 | 3 | 1 | 1 | 2 |
| CIRCA | 1 | 4 | 3 | 2 | 2 |
| ORCCAD | 6 | 3 | 2 | 4 | 2 |
| LAAS | 7 | 3 | 4 | 4 | 4 |
| CLARAty | 2 | 2 | 3 | 8 | 1 |
| RA | 2 | 4 | 4 | 5 | 4 |
| IDEA | 2 | 5 | 5 | 6 | 6 |
| CMTI | 7 | 5 | 6 | 7 | 7 |
| COTAMA | 8 | 8 | 9 | 9 | 10 |
| ORCA | 7 | 7 | 3 | 6 | 1 |
| LAURON | 8 | 6 | 10 | 8 | 7 |
| Nimble Limbs | 10 | 6 | 4 | 6 | 1 |
| MoCLORA | 8 | 7 | 10 | 8 | 9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prados, C.; Hernando, M.; Gambao, E.; Brunete, A. A Review and Evaluation of Control Architectures for Modular Legged and Climbing Robots. Biomimetics 2024, 9, 319. https://doi.org/10.3390/biomimetics9060319
Prados C, Hernando M, Gambao E, Brunete A. A Review and Evaluation of Control Architectures for Modular Legged and Climbing Robots. Biomimetics. 2024; 9(6):319. https://doi.org/10.3390/biomimetics9060319
Chicago/Turabian StylePrados, Carlos, Miguel Hernando, Ernesto Gambao, and Alberto Brunete. 2024. "A Review and Evaluation of Control Architectures for Modular Legged and Climbing Robots" Biomimetics 9, no. 6: 319. https://doi.org/10.3390/biomimetics9060319
APA StylePrados, C., Hernando, M., Gambao, E., & Brunete, A. (2024). A Review and Evaluation of Control Architectures for Modular Legged and Climbing Robots. Biomimetics, 9(6), 319. https://doi.org/10.3390/biomimetics9060319