
Deep CNN-Based Static Modeling of Soft Robots Utilizing Absolute Nodal Coordinate Formulation



Abstract
:1. Introduction
2. Absolute Nodal Coordinate Formulation (ANCF)
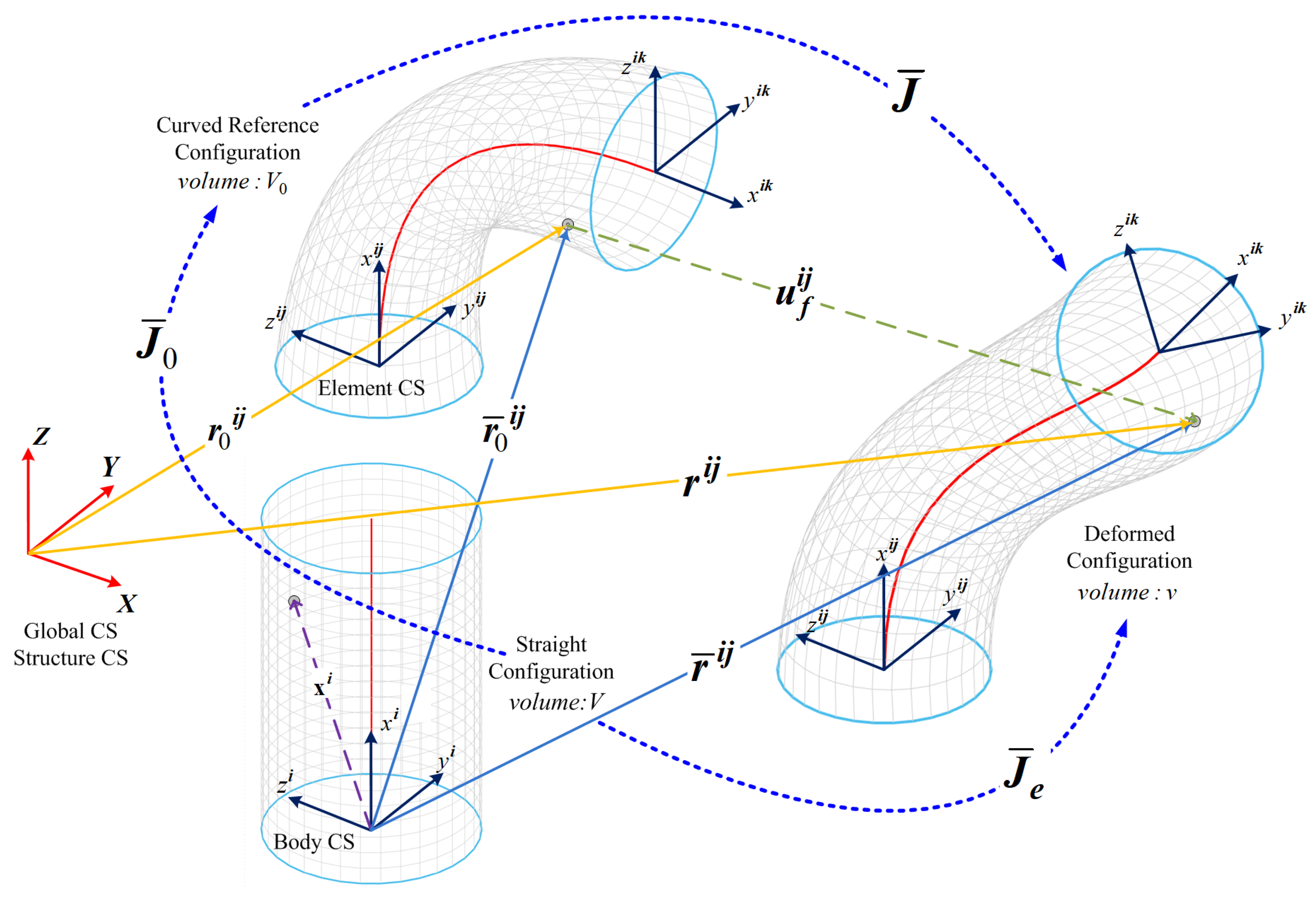
2.1. Problem Definition
2.2. Elastic Forces
2.3. Generalized External Forces
2.4. Static Analysis
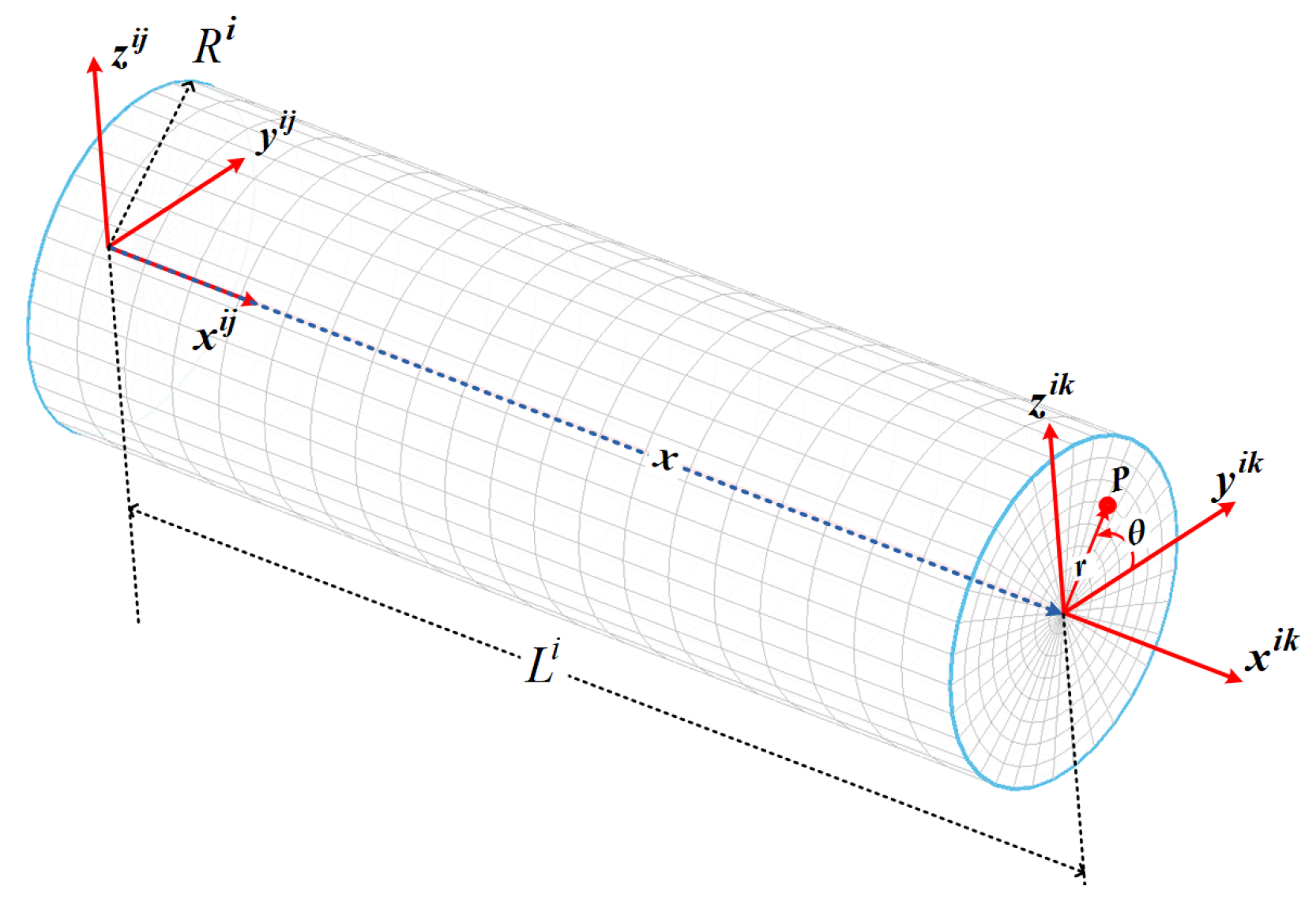
2.5. 3D-Beam Element with Circular Cross Section
3. Deep-CNN Quasi-Statics Modeling
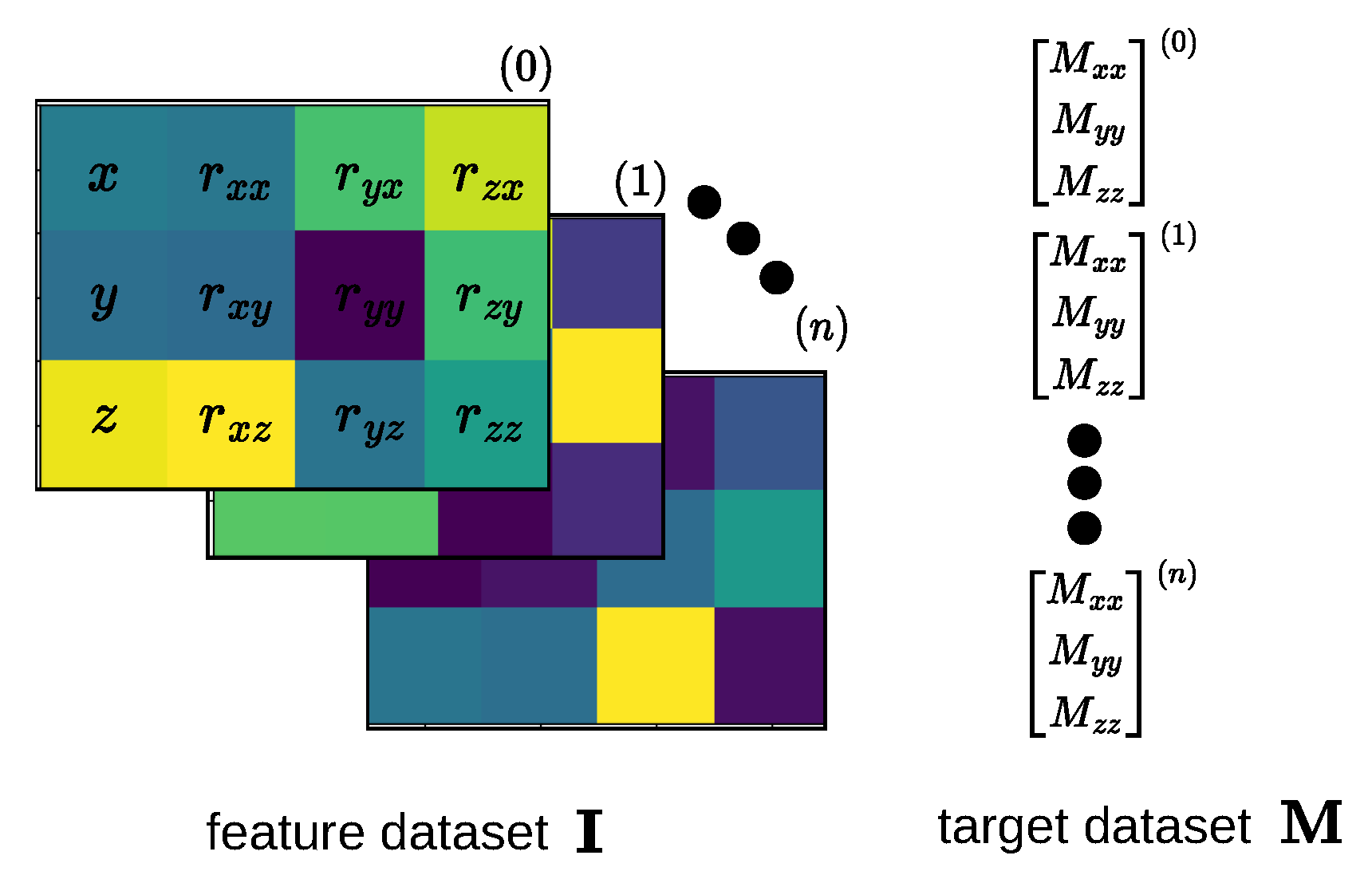
3.1. Data Collection and Processing
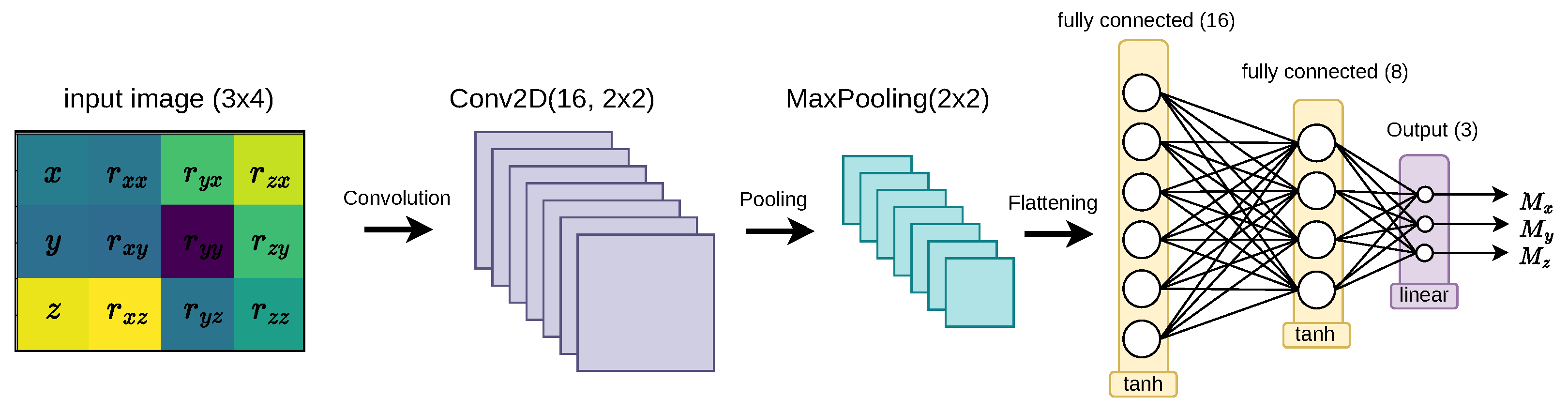
3.2. CNN Model Architectures
3.3. Training of DNN Models
4. Results and Discussion
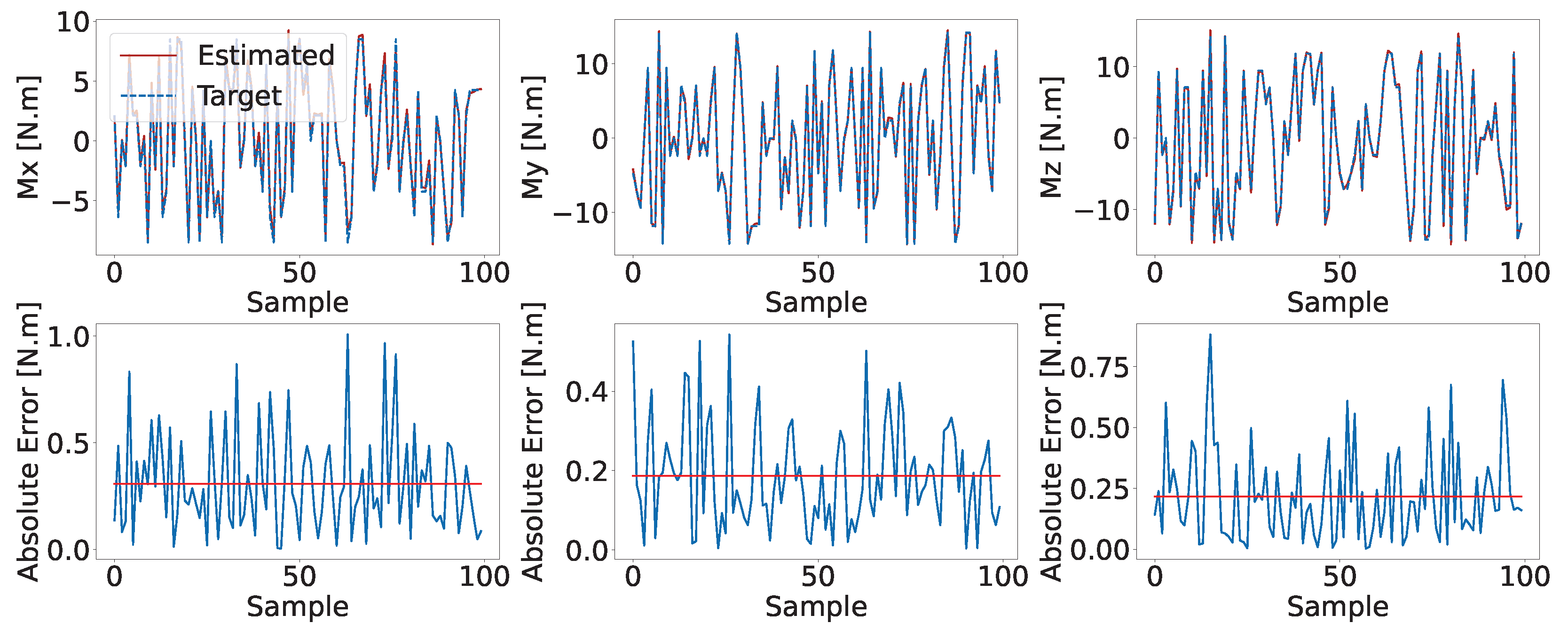
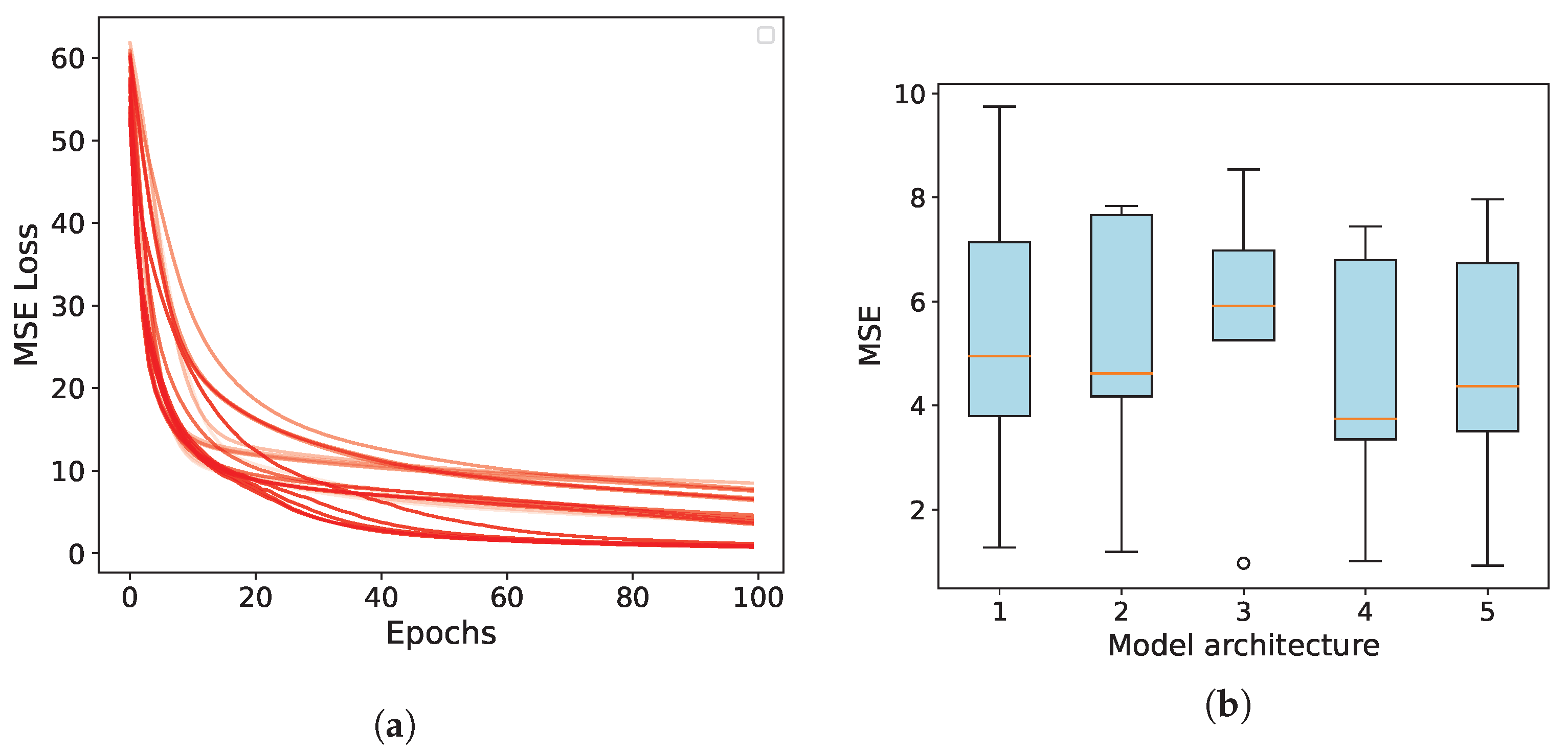
4.1. CNN Model Performance
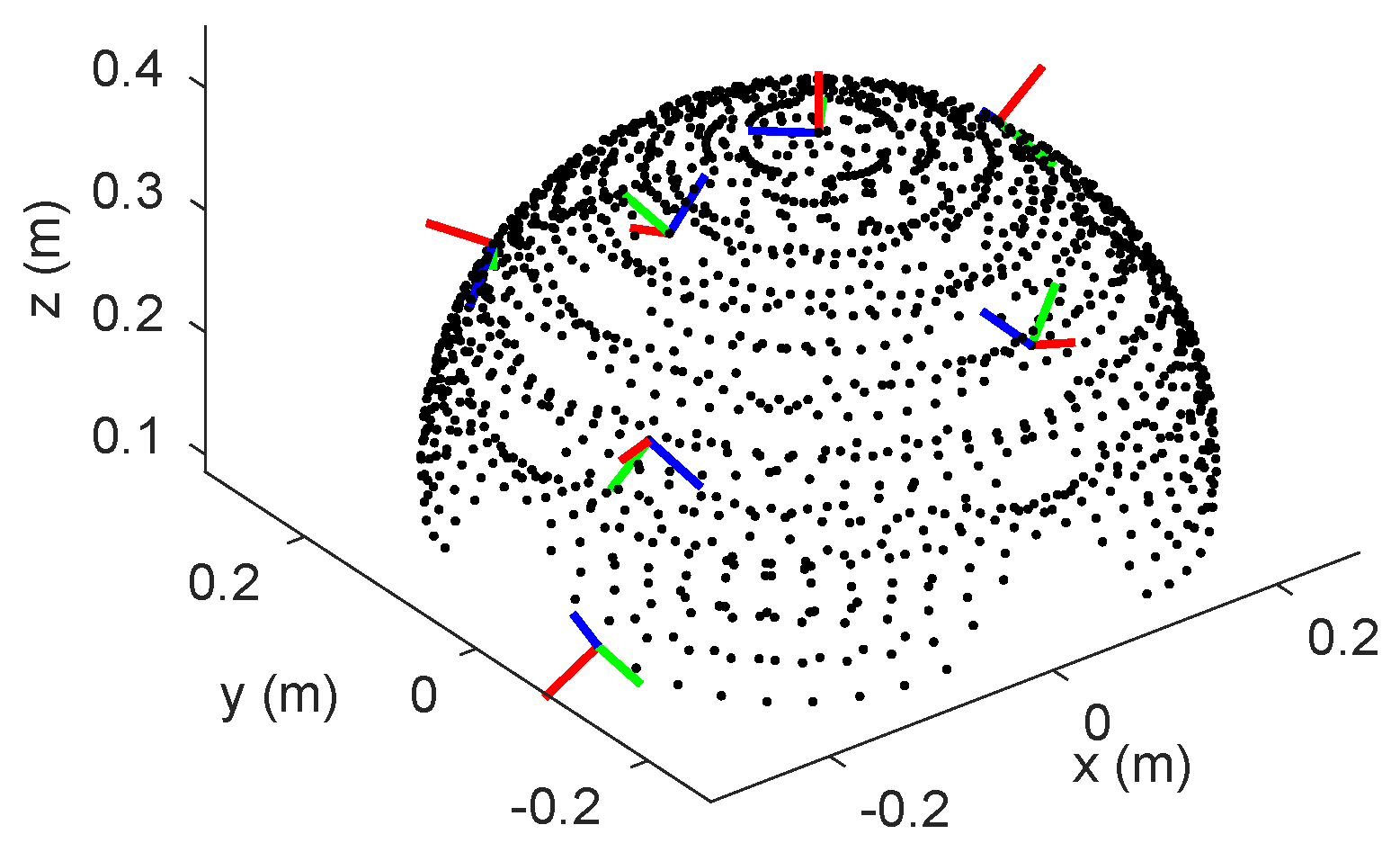
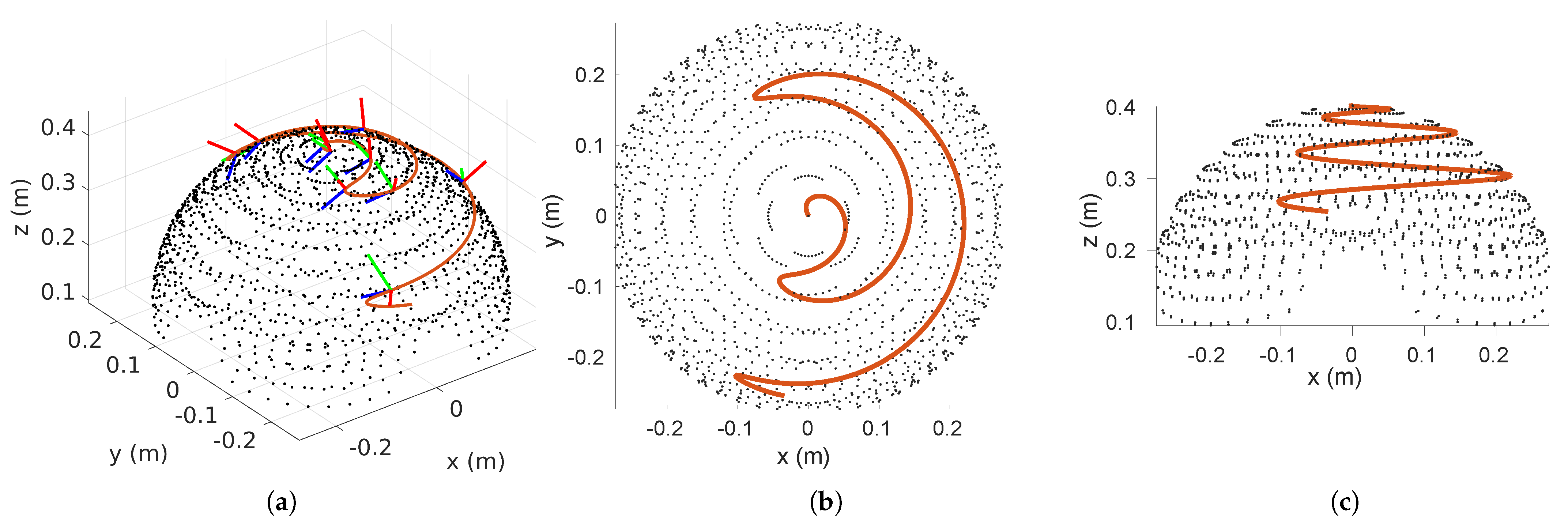
4.2. Trajectory Generation
4.3. K-Fold Cross Validation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ANCF | Absolute Nodal Coordinate Formulation |
| CNN | Convolutional Neural Networks |
| MSE | Mean Square Error |
| CCM | Constant Curvature Model |
References
- Russo, M.; Sadati, S.M.H.; Dong, X.; Mohammad, A.; Walker, I.D.; Bergeles, C.; Xu, K.; Axinte, D.A. Continuum robots: An overview. Adv. Intell. Syst. 2023, 5, 2200367. [Google Scholar] [CrossRef]
- Burgner-Kahrs, J.; Rucker, D.C.; Choset, H. Continuum robots for medical applications: A survey. IEEE Trans. Robot. 2015, 31, 1261–1280. [Google Scholar] [CrossRef]
- Runciman, M.; Darzi, A.; Mylonas, G.P. Soft robotics in minimally invasive surgery. Soft Robot. 2019, 6, 423–443. [Google Scholar] [CrossRef] [PubMed]
- Seleem, I.A.; El-Hussieny, H.; Ishii, H. Imitation-Based Motion Planning and Control of a Multi-Section Continuum Robot Interacting with the Environment. IEEE Robot. Autom. Lett. 2023, 8, 1351–1358. [Google Scholar] [CrossRef]
- Stroppa, F.; Selvaggio, M.; Agharese, N.; Luo, M.; Blumenschein, L.H.; Hawkes, E.W.; Okamura, A.M. Shared-Control Teleoperation Paradigms on a Soft-Growing Robot Manipulator. J. Intell. Robot. Syst. 2023, 109, 30. [Google Scholar] [CrossRef]
- Wooten, M.; Frazelle, C.; Walker, I.D.; Kapadia, A.; Lee, J.H. Exploration and inspection with vine-inspired continuum robots. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 5526–5533. [Google Scholar]
- Li, G.; Yu, J.; Dong, D.; Pan, J.; Wu, H.; Cao, S.; Pei, X.; Huang, X.; Yi, J. Systematic Design of a 3-DOF Dual-Segment Continuum Robot for In Situ Maintenance in Nuclear Power Plants. Machines 2022, 10, 596. [Google Scholar] [CrossRef]
- Shi, C.; Luo, X.; Qi, P.; Li, T.; Song, S.; Najdovski, Z.; Fukuda, T.; Ren, H. Shape sensing techniques for continuum robots in minimally invasive surgery: A survey. IEEE Trans. Biomed. Eng. 2016, 64, 1665–1678. [Google Scholar] [CrossRef]
- Chikhaoui, M.T.; Burgner-Kahrs, J. Control of continuum robots for medical applications: State of the art. In Proceedings of the ACTUATOR 2018; 16th International Conference on New Actuators, Bremen, Germany, 25–27 June 2018; pp. 1–11. [Google Scholar]
- Dupont, P.E.; Simaan, N.; Choset, H.; Rucker, C. Continuum robots for medical interventions. Proc. IEEE 2022, 110, 847–870. [Google Scholar] [CrossRef]
- Li, G.; Wong, T.W.; Shih, B.; Guo, C.; Wang, L.; Liu, J.; Wang, T.; Liu, X.; Yan, J.; Wu, B.; et al. Bioinspired soft robots for deep-sea exploration. Nat. Commun. 2023, 14, 7097. [Google Scholar] [CrossRef]
- Azami, O.; Ishibashi, K.; Komagata, M.; Yamamoto, K. Development of hydraulically-driven soft hand for handling heavy vegetables and its experimental evaluation. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 2577–2583. [Google Scholar]
- Car, M.; Ferreira, B.A.; Vuletic, J.; Orsag, M. Structured Ecological Cultivation with Autonomous Robots in Agriculture: Toward a Fully Autonomous Robotic Indoor Farming System. IEEE Robot. Autom. Mag. 2023, 2–13. [Google Scholar] [CrossRef]
- Seleem, I.A.; El-Hussieny, H.; Ishii, H. Recent Developments of Actuation Mechanisms for Continuum Robots: A Review. Int. J. Control. Autom. Syst. 2023, 21, 1592–1609. [Google Scholar] [CrossRef] [PubMed]
- Della Santina, C.; Katzschmann, R.K.; Bicchi, A.; Rus, D. Soft Robotic Modeling and Control: Bringing Together Articulated Soft Robots and Soft-Bodied Robots. Int. J. Robot. Res. 2021, 40, 3–6. [Google Scholar] [CrossRef]
- George Thuruthel, T.; Renda, F.; Iida, F. First-order dynamic modeling and control of soft robots. Front. Robot. AI 2020, 7, 95. [Google Scholar] [CrossRef]
- El-Hussieny, H.; Hameed, I.A.; Zaky, A.B. Plant-Inspired Soft Growing Robots: A Control Approach Using Nonlinear Model Predictive Techniques. Appl. Sci. 2023, 13, 2601. [Google Scholar] [CrossRef]
- El-Hussieny, H.; Hameed, I.A.; Ryu, J.H. Nonlinear model predictive growth control of a class of plant-inspired soft growing robots. IEEE Access 2020, 8, 214495–214503. [Google Scholar] [CrossRef]
- AlAttar, A.; Hmida, I.B.; Renda, F.; Kormushev, P. Kinematic-Model-Free Tip Position Control of Reconfigurable and Growing Soft Continuum Robots. In Proceedings of the 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023; pp. 1–7. [Google Scholar]
- Lin, D.; Dong, X.; Yang, C. Position Tracking for Continuum Robots with Joint Limit Constraints. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems and Artificial Intelligence (ICUSAI), Xi’an, China, 22–24 November 2019; pp. 39–44. [Google Scholar]
- Armanini, C.; Boyer, F.; Mathew, A.T.; Duriez, C.; Renda, F. Soft Robots Modeling: A Structured Overview. IEEE Trans. Robot. 2023, 39, 1728–1748. [Google Scholar] [CrossRef]
- Habibi, H.; Yang, C.; Kang, R.; Walker, I.D.; Godage, I.S.; Dong, X.; Branson, D.T. Modelling an Actuated Large Deformation Soft Continuum Robot Surface Undergoing External Forces Using a Lumped-Mass Approach. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 5958–5963. [Google Scholar] [CrossRef]
- Webster, R.J.; Jones, B.A. Design and Kinematic Modeling of Constant Curvature Continuum Robots: A Review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Falkenhahn, V.; Mahl, T.; Hildebrandt, A.; Neumann, R.; Sawodny, O. Dynamic modeling of constant curvature continuum robots using the Euler-Lagrange formalism. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2428–2433. [Google Scholar] [CrossRef]
- Seleem, I.A.; Assal, S.F.; Ishii, H.; El-Hussieny, H. Demonstration-Guided Pose Planning and Tracking for Multi-Section Continuum Robots Considering Robot Dynamics. IEEE Access 2019, 7, 166690–166703. [Google Scholar] [CrossRef]
- Seleem, I.A.; El-Hussieny, H.; Assal, S.F.; Ishii, H. Development and Stability Analysis of an Imitation Learning-Based Pose Planning Approach for Multi-Section Continuum Robot. IEEE Access 2020, 8, 99366–99379. [Google Scholar] [CrossRef]
- Qi, F.; Chen, B.; Gao, S.; She, S. Dynamic model and control for a cable-driven continuum manipulator used for minimally invasive surgery. Int. J. Med. Robot. Comput. Assist. Surg. 2021, 17, e2234. [Google Scholar] [CrossRef]
- Naughton, N.; Sun, J.; Tekinalp, A.; Parthasarathy, T.; Chowdhary, G.; Gazzola, M. Elastica: A Compliant Mechanics Environment for Soft Robotic Control. IEEE Robot. Autom. Lett. 2021, 6, 3389–3396. [Google Scholar] [CrossRef]
- Huang, W.; Huang, X.; Majidi, C.; Jawed, M.K. Dynamic simulation of articulated soft robots. Nat. Commun. 2020, 11, 2233. [Google Scholar] [CrossRef] [PubMed]
- Bieze, T.M.; Largilliere, F.; Kruszewski, A.; Zhang, Z.; Merzouki, R.; Duriez, C. Finite Element Method-Based Kinematics and Closed-Loop Control of Soft, Continuum Manipulators. Soft Robot. 2018, 5, 348–364. [Google Scholar] [CrossRef] [PubMed]
- Grazioso, S.; Gironimo, G.D.; Siciliano, B. A Geometrically Exact Model for Soft Continuum Robots: The Finite Element Deformation Space Formulation. Soft Robot. 2019, 6, 790–811. [Google Scholar] [CrossRef] [PubMed]
- Du Pasquier, C.; Jeong, S.; Okamura, A.M. Finite Element Modeling of Pneumatic Bending Actuators for Inflated-Beam Robots. IEEE Robot. Autom. Lett. 2023, 8, 7416–7423. [Google Scholar] [CrossRef]
- Sadati, S.M.; Naghibi, S.E.; Shiva, A.; Michael, B.; Renson, L.; Howard, M.; Rucker, C.D.; Althoefer, K.; Nanayakkara, T.; Zschaler, S.; et al. TMTDyn: A Matlab package for modeling and control of hybrid rigid–continuum robots based on discretized lumped systems and reduced-order models. Int. J. Robot. Res. 2021, 40, 296–347. [Google Scholar] [CrossRef]
- Gravagne, I.A.; Rahn, C.D.; Walker, I.D. Large deflection dynamics and control for planar continuum robots. IEEE/ASME Trans. Mechatron. 2003, 8, 299–307. [Google Scholar] [CrossRef]
- Wang, X.; Li, Y.; Kwok, K.W. A survey for machine learning-based control of continuum robots. Front. Robot. AI 2021, 8, 730330. [Google Scholar] [CrossRef]
- Pierson, H.A.; Gashler, M.S. Deep learning in robotics: A review of recent research. Adv. Robot. 2017, 31, 821–835. [Google Scholar] [CrossRef]
- Nada, A.A.; Hussein, B.A.; Megahed, S.M.; Shabana, A.A. Floating Frame of Reference and Absolute Nodal Coordinate Formulations in the Large Deformation Analysis of Robotic Manipulators: A Comparative Experimental and Numerical Study. In Volume 4: 7th International Conference on Multibody Systems, Nonlinear Dynamics, and Control, Parts A, B and C; ASME: New York, NY, USA, 2009; Volume 4, pp. 889–900. [Google Scholar] [CrossRef]
- Shabana, A.A. Dynamics of Multibody Systems; University Press: Cambridge, UK, 2013; Volume 9781107042, pp. 1–384. [Google Scholar] [CrossRef]
- Shabana, A.A. Definition of ANCF Finite Elements. J. Comput. Nonlinear Dyn. 2015, 10, 054506. [Google Scholar] [CrossRef]
- Shabana, A.A. An overview of the ANCF approach, justifications for its use, implementation issues, and future research directions. Multibody Syst. Dyn. 2023, 58, 433–477. [Google Scholar] [CrossRef]
- Taylor, M.; Serban, R.; Negrut, D. An efficiency comparison of different ANCF implementations. Int. J. Non-Linear Mech. 2023, 149, 104308. [Google Scholar] [CrossRef]
- Wang, T.; Mikkola, A.; Matikainen, M.K. An Overview of Higher-Order Beam Elements Based on the Absolute Nodal Coordinate Formulation. J. Comput. Nonlinear Dyn. 2022, 17, 091001. [Google Scholar] [CrossRef]
- Bayoumy, A.; Nada, A.; Megahed, S. Modeling slope discontinuity of large size wind-turbine blade using absolute nodal coordinate formulation. In Proceedings of the ASME Design Engineering Technical Conference, Chicago, IL, USA, 12–15 August 2012; Volume 6. [Google Scholar] [CrossRef]
- Nada, A.A.; Hussein, B.A.; Megahed, S.M.; Shabana, A.A. Use of the floating frame of reference formulation in large deformation analysis: Experimental and numerical validation. Proc. Inst. Mech. Eng. Part K J. -Multi-Body Dyn. 2010, 224, 45–58. [Google Scholar] [CrossRef]
- García-Vallejo, D.; Mayo, J.; Escalona, J.L.; Domínguez, J. Efficient evaluation of the elastic forces and the jacobian in the absolute nodal coordinate formulation. Nonlinear Dyn. 2004, 35, 313–329. [Google Scholar] [CrossRef]
- Sugiyama, H.; Suda, Y. A curved beam element in the analysis of flexible multi-body systems using the absolute nodal coordinates. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2007, 221, 219–231. [Google Scholar] [CrossRef]
- Sugiyama, H.; Escalona, J.L.; Shabana, A.A. Spatial Joint Constraints in Flexible Multibody Systems Using the Absolute Nodal Coordinate Formulation. Proc. ASME Des. Eng. Tech. Conf. 2008, 5A, 467–476. [Google Scholar] [CrossRef]
- Bechtel, S.E.; Lowe, R.L. Fundamentals of Continuum Mechanics: With Applications to Mechanical, Thermomechanical, and Smart Materials; Academic Press: Cambridge, MA, USA, 2015; p. 330. [Google Scholar]
- Nada, A.; Al-Shahrani, A. Use of mixed coordinates in modeling wind turbines including tubular tower. Mech. Sci. 2019, 10, 35–46. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Anguita, D.; Ghio, A.; Ridella, S.; Sterpi, D. K-Fold Cross Validation for Error Rate Estimate in Support Vector Machines. In Proceedings of The 2009 International Conference on Data Mining, Las Vegas, NV, USA, 13–16 July 2009; pp. 291–297. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Layers | Size | Average MSE |
|---|---|---|---|
| 1 | 259 | 4.19 | |
| 2 | 187 | 8.17 | |
| 3 | 199 | 7.19 | |
| 4 | 651 | 4.54 | |
| 5 | 2515 | 1.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Hussieny, H.; Hameed, I.A.; Nada, A.A. Deep CNN-Based Static Modeling of Soft Robots Utilizing Absolute Nodal Coordinate Formulation. Biomimetics 2023, 8, 611. https://doi.org/10.3390/biomimetics8080611
El-Hussieny H, Hameed IA, Nada AA. Deep CNN-Based Static Modeling of Soft Robots Utilizing Absolute Nodal Coordinate Formulation. Biomimetics. 2023; 8(8):611. https://doi.org/10.3390/biomimetics8080611
Chicago/Turabian StyleEl-Hussieny, Haitham, Ibrahim A. Hameed, and Ayman A. Nada. 2023. "Deep CNN-Based Static Modeling of Soft Robots Utilizing Absolute Nodal Coordinate Formulation" Biomimetics 8, no. 8: 611. https://doi.org/10.3390/biomimetics8080611
APA StyleEl-Hussieny, H., Hameed, I. A., & Nada, A. A. (2023). Deep CNN-Based Static Modeling of Soft Robots Utilizing Absolute Nodal Coordinate Formulation. Biomimetics, 8(8), 611. https://doi.org/10.3390/biomimetics8080611