
Exploring Embodied Intelligence in Soft Robotics: A Review

 ,
, 
Abstract
1. Introduction
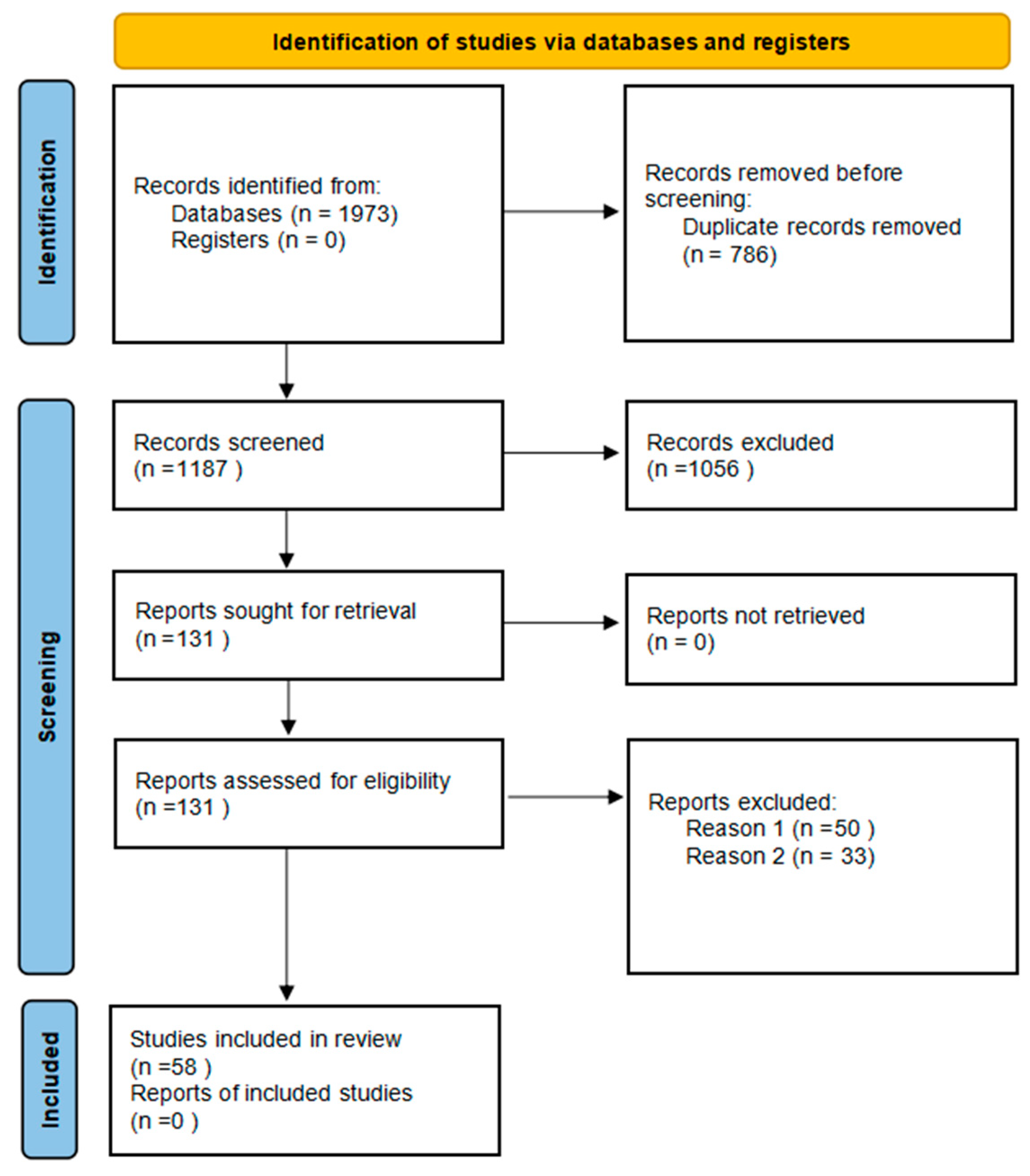
2. Methodology
2.1. Search Strategy
2.2. Pre-Inclusion and Exclusion Criteria
- The paper does not clearly discuss the application of artificial intelligence technologies in soft robotics or how artificial intelligence extends to embodied intelligence.
- The research focus deviates from soft robotics or embodied intelligence, such as concentrating solely on rigid robots, or the study does not cover enhancing robot intelligence through an interaction with the environment.
2.3. Screening and Selection Process
2.4. Data Extraction and Analysis
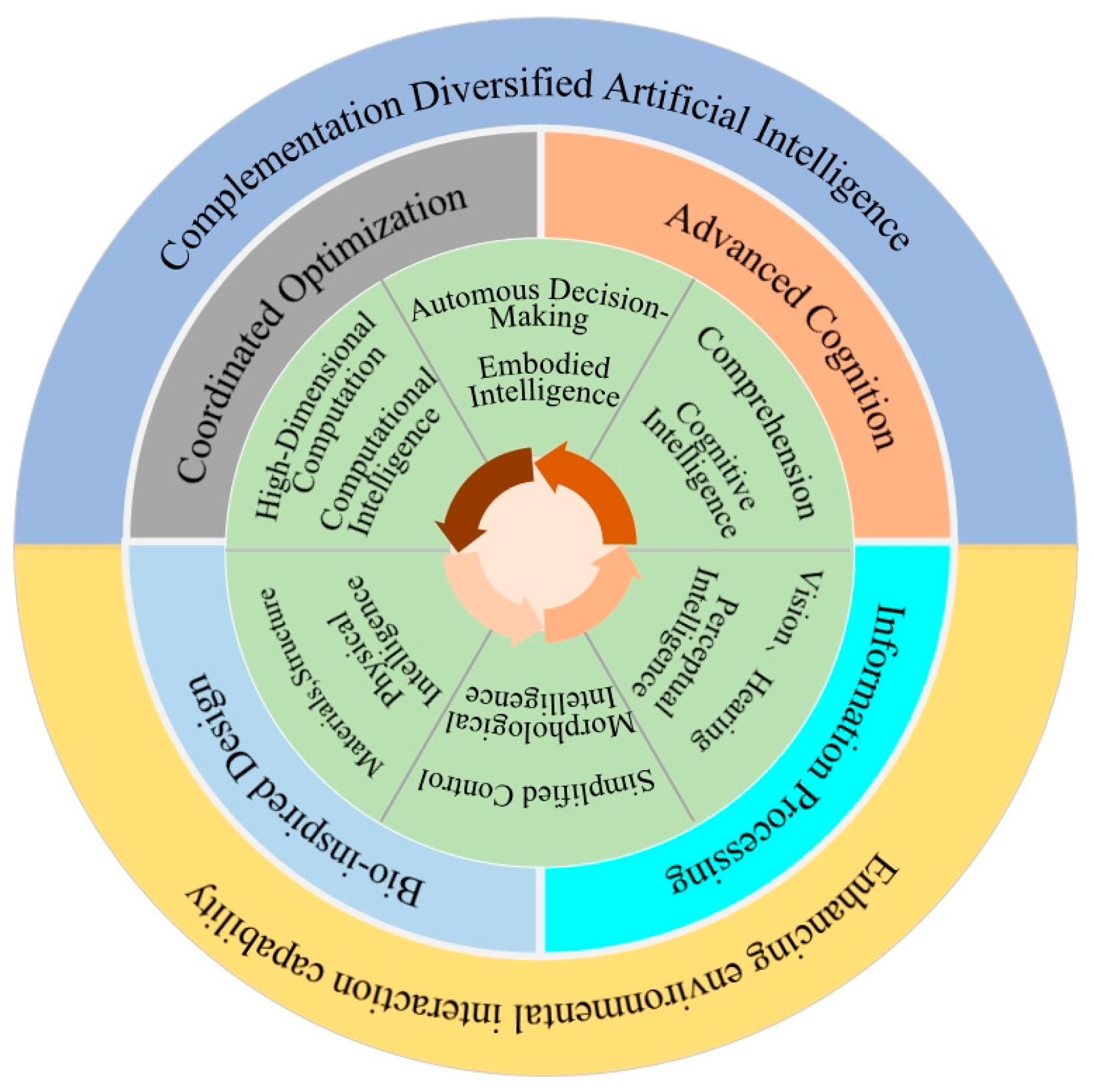
3. Embodied Intelligence and Its Relationship with Other Intelligences
4. Research Progress on Embodied Intelligence in the Context of Soft Robotics
- How to design computable body morphology: carry out research on how to achieve intended computational functionalities through designing body structure and materials, including optimizing perception, decision making, and behavior generation through morphological design.
- The co-evolution between body and control systems: carry out research on how to co-evolve the body (morphology) and brain (control system) of robots and how these interact to influence the overall performance and adaptability of the robot jointly.
- Exploring how soft robots utilize their flexible bodies and materials to perceive changes in the external environment and how to use this perceptual information for real-time decision making and control, driving the development of soft robotics towards higher intelligence, autonomy, and practicality.
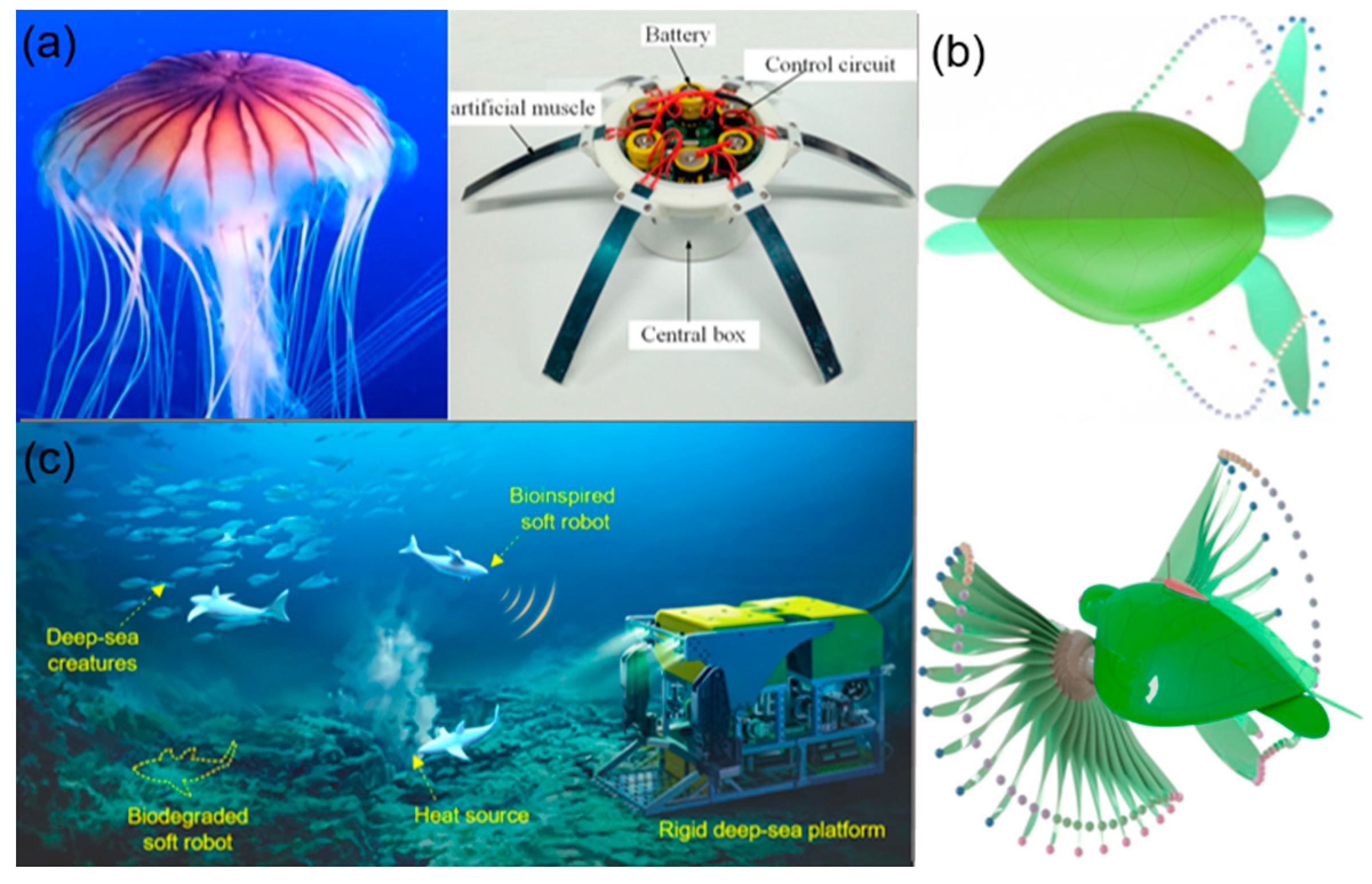
4.1. Bionic Soft Robots
4.2. Embodied Morphological Computing
4.3. Embodied Artificial Evolution
4.4. Perception, Control, and Decision Making
4.4.1. Multimodal Perception
4.4.2. Control Strategies
4.4.3. Autonomous Decision Making
5. Summary and Future Challenges
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Turing, A.M. Computing Machinery and Intelligence; Springer: Dordrecht, The Netherlands, 2009; pp. 23–65. [Google Scholar] [CrossRef]
- Brooks, R. A robust layered control system for a mobile robot. IEEE J. Robot. Autom. 1986, 2, 14–23. [Google Scholar] [CrossRef]
- Keller, B.; Venkatesan, R.; Dai, S.; Tell, S.G.; Zimmer, B.; Sakr, C.; Dally, W.J.; Gray, C.T.; Khailany, B. A 95.6-TOPS/w deep learning inference accelerator with per-vector scaled 4-bit quantization in 5 nm. In Proceedings of the 2022 IEEE Symposium on VLSI Technology and Circuits, Honolulu, HI, USA, 12–17 June 2022; pp. 16–17. [Google Scholar]
- Laschi, C. Embodied intelligence in soft robotics: Joys and sorrows. IOP Conf. Ser. Mater. Sci. Eng. 2022, 1261, 012002. [Google Scholar] [CrossRef]
- Romano, D.; Wahi, A.; Miraglia, M.; Stefanini, C. Development of a novel underactuated robotic fish with magnetic transmission system. Machines 2022, 10, 755. [Google Scholar] [CrossRef]
- Majumdar, A.; Yadav, K.; Arnaud, S.; Ma, Y.J.; Chen, C.; Silwal, S.; Jain, A.; Berges, V.; Abbeel, P.; Malik, J.; et al. Where are we in the search for an Artificial Visual Cortex for Embodied Intelligence? Adv. Neural Inf. Process. Syst. 2024, 36. [Google Scholar]
- Ma, B.; Xu, C.; Cui, L.; Zhao, C.; Liu, H. Magnetic printing of liquid metal for perceptive soft actuators with embodied Intelligence. ACS Appl. Mater. Interfaces 2021, 13, 5574–5582. [Google Scholar] [CrossRef] [PubMed]
- Straub, I. Embodied intelligence in physical, social and technological environments. IOP Conf. Ser. Mater. Sci. Eng. 2022, 1261, 012024. [Google Scholar] [CrossRef]
- Liu, H.; Guo, D.; Sun, F.; Zhang, X. Morphology-based embodied intelligence: Historical retrospect and research progress. Acta Autom. Sin. 2023, 49, 1131–1154. [Google Scholar]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2020, 372, n71. [Google Scholar]
- Alrahhal, H.; Razan, J. AFOX: A new adaptive nature-inspired optimization algorithm. Artif. Intell. Rev. 2023, 56, 15523–15566. [Google Scholar] [CrossRef]
- Kumaravel, A.; Muthu, K.; Deenadayalan, N. A view of artificial neural network models in different application Areas. E3S Web Conf. 2021, 287, 03001. [Google Scholar]
- Reel, P.S.; Reel, S.; Pearson, E.; Trucco, E.; Jefferson, E.R. Using machine learning approaches for multi-omics data analysis: A review. Biotechnol. Adv. 2021, 49, 107739. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Xie, Z.; Yuan, F.; Li, L.; Liu, Y.; Wang, T.; Wen, L. Bio-inspired physical intelligence for soft robotics. Sci. Bull. 2022, 67, 959–975. [Google Scholar] [CrossRef]
- Schmarje, L.; Santarossa, M.; Schröder, S.M.; Koch, R. A survey on semi-, self-and unsupervised learning for image classification. IEEE Access 2021, 9, 82146–82168. [Google Scholar] [CrossRef]
- Wu, T.; He, S.; Liu, J.; Sun, S.; Liu, K.; Han, Q.L.; Tang, Y. A brief overview of ChatGPT: The history, status quo and potential future development. IEEE/CAA J. Autom. Sin. 2023, 10, 1122–1136. [Google Scholar] [CrossRef]
- Vemprala, S.; Bonatti, R.; Bucker, A.; Kapoor, A. Chatgpt for robotics: Design principles and model abilities. arXiv 2023, arXiv:2306.17582. [Google Scholar] [CrossRef]
- Mengaldo, G.; Renda, F.; Brunton, S.L.; Bächer, M.; Calisti, M.; Duriez, C.; Chirikjian, G.S.; Laschi, C. A concise guide to modelling the physics of embodied intelligence in soft robotics. Nat. Rev. Phys. 2022, 4, 595–610. [Google Scholar] [CrossRef]
- Laschi, C. Modeling embodied intelligence: Can we capture its essence by modeling internal and external interactions? IOP Conf. Ser. Mater. Sci. Eng. 2023, 1292, 012001. [Google Scholar] [CrossRef]
- Sitti, M. Physical intelligence as a new paradigm. Extrem. Mech. Lett. 2021, 46, 101340. [Google Scholar] [CrossRef]
- Horibe, K.; Walker, K.; Risi, S. Regenerating soft robots through neural cellular automata. In Proceedings of the Genetic Programming: 24th European Conference, EuroGP 2021, Held as Part of EvoStar 2021, Virtual Event, 7–9 April 2021; Proceedings 24. Springer International Publishing: Berlin/Heidelberg, Germany, 2021; pp. 36–50. [Google Scholar]
- Wang, C.; Sim, K.; Chen, J.; Kim, H.; Rao, Z.; Li, Y.; Chen, W.; Song, J.; Verduzco, R.; Yu, C. Soft ultrathin electronics innervated adaptive fully soft robots. Adv. Mater. 2018, 30, 1706695. [Google Scholar] [CrossRef]
- Ahmed, F.; Waqas, M.; Jawed, B.; Soomro, A.M.; Kumar, S.; Hina, A.; Khan, U.; Kim, K.H.; Choi, K. Decade of bio-inspired soft robots: A review. Smart Mater. Struct. 2022, 31, 073002. [Google Scholar] [CrossRef]
- Yang, Y.; Chu, C.; Jin, H.; Hu, Q.; Xu, M.; Dong, E. Design, Modeling, and Control of an Aurelia-Inspired Robot Based on SMA Artificial Muscles. Biomimetics 2023, 8, 261. [Google Scholar] [CrossRef] [PubMed]
- van der Geest, N.; Garcia, L.; Nates, R.; Borrett, F. New Insights into Sea Turtle Propulsion and Their Cost of Transport Point to a Potential New Generation of High-Efficient Underwater Drones for Ocean Exploration. J. Mar. Sci. Eng. 2023, 11, 1944. [Google Scholar] [CrossRef]
- Li, G.; Wong, T.W.; Shih, B.; Guo, C.; Wang, L.; Liu, J.; Wang, T.; Liu, X.; Yan, J.; Wu, B.; et al. Bioinspired soft robots for deep-sea exploration. Nat. Commun. 2023, 14, 7097. [Google Scholar] [CrossRef] [PubMed]
- Bell, M.A.; Weaver, J.C.; Wood, R.J. An ambidextrous starfish-inspired exploration and reconnaissance robot (The ASTER-bot). Soft Robot. 2022, 9, 991–1000. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Zhang, P.; Huang, H.; Zhu, J. Bio-inspired transparent soft jellyfish robot. Soft Robot. 2023, 10, 590–600. [Google Scholar] [CrossRef] [PubMed]
- Xie, Z.; Yuan, F.; Liu, J.; Tian, L.; Chen, B.; Fu, Z.; Mao, S.; Jin, T.; Wang, Y.; He, X.; et al. Octopus-inspired sensorized soft arm for environmental interaction. Sci. Robot. 2023, 8, eadh7852. [Google Scholar] [CrossRef]
- Aubin, C.A.; Gorissen, B.; Milana, E.; Buskohl, P.R.; Lazarus, N.; Slipher, G.A.; Keplinger, C.; Bongard, J.C.; Iida, F.; Lewis, J.; et al. Towards enduring autonomous robots via embodied energy. Nature 2022, 602, 393–402. [Google Scholar] [CrossRef] [PubMed]
- Merces, L.; Ferro, L.M.M.; Thomas, A.; Karnaushenko, D.D.; Luo, Y.; Egunov, A.I.; Zhang, W.; Bandari, V.K.; Lee, Y.; McCaskill, J.S.; et al. Bio-Inspired Dynamically Morphing Microelectronics towards High-Density Energy Applications and Intelligent Biomedical Implants. Adv. Mater. 2024, 2313327. [Google Scholar] [CrossRef]
- McCaskill, J.S.; Karnaushenko, D.; Zhu, M.; Schmidt, O.G. Microelectronic Morphogenesis: Smart Materials with Electronics Assembling into Artificial Organisms. Adv. Mater. 2023, 35, 2306344. [Google Scholar] [CrossRef]
- Medina-Sánchez, M.; Schwarz, L.; Meyer, A.K.; Hebenstreit, F.; Schmidt, O.G. Cellular cargo delivery: Toward assisted fertilization by sperm-carrying micromotors. Nano Lett. 2016, 16, 555. [Google Scholar] [CrossRef]
- Yan, M.; Huang, C.; Bienstman, P.; Tino, P.; Lin, W.; Sun, J. Emerging opportunities and challenges for the future of reservoir computing. Nat. Commun. 2023, 15, 2056. [Google Scholar] [CrossRef] [PubMed]
- Hauser, H.; Nanayakkara, T.; Forni, F. Leveraging morphological computation for controlling soft robots: Learning from nature to control soft robots. IEEE Control Syst. 2023, 43, 114–129. [Google Scholar] [CrossRef]
- Nakajima, K.; Hauser, H.; Kang, R.; Guglielmino, E. A soft body as a reservoir: Case studies in a dynamic model of octopus-inspired soft robotic arm. Front. Comput. Neurosci. 2013, 7, 91. [Google Scholar] [CrossRef] [PubMed]
- Eder, M.; Hisch, F.; Hauser, H. Morphological computation-based control of a modular, pneumatically driven, soft robotic arm. Adv. Robot. 2018, 32, 375–385. [Google Scholar] [CrossRef]
- Judd, E.; Soter, G.; Rossiter, J.; Hauscr, H. Sensing through the body-non-contact object localisation using morphological computation. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; pp. 558–563. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Eiben, A.E.; Kernbach, S.; Haasdijk, E. Embodied artificial evolution: Artificial evolutionary systems in the 21st Century. Evol. Intell. 2012, 5, 261–272. [Google Scholar] [CrossRef] [PubMed]
- Feng, F.; Wang, J.; Zhang, C.; Li, W.; Yang, X.; Geng, X. Genes in Intelligent Agents. arXiv 2023, arXiv:2306.10225. [Google Scholar]
- Gupta, A.; Savarese, S.; Ganguli, S.; Fei-Fei, L. Embodied intelligence via learning and evolution. Nat. Commun. 2021, 12, 5721. [Google Scholar] [CrossRef] [PubMed]
- Saito, T.; Nishimura, H.; Oka, M. Comparative studies of evolutionary methods and RL for learning behavior of virtual creatures. In Proceedings of the 2022 IEEE Symposium Series on Computational Intelligence (SSCI), Singapore, 4–7 December 2022; pp. 1059–1065. [Google Scholar]
- Kriegman, S.; Nick, C.; Josh, B. How morphological development can guide evolution. Sci. Rep. 2018, 8, 13934. [Google Scholar] [CrossRef]
- Pathak, D.; Lu, C.; Darrell, T.; Isola, P.; Efros, A.A. Learning to Control Self-Assembling Morphologies: A Study of Generalization via Modularity. In Proceedings of the 33rd Conference on Neural Information Processing Systems (NeurIPS 2019), Vancouver, BC, Canada, 8–14 December 2019; Volume 32. [Google Scholar]
- Williams, R.S.B.; Chubb, J.R.; Insall, R.; King, J.S.; Pears, C.J.; Thompson, E.; Weijer, C.J. Moving the research forward: The best of british biology using the tractable model system dictyostelium discoideum. Cells 2021, 10, 3036. [Google Scholar] [CrossRef]
- Kalimuthu, M.; Pathmakumar, T.; Hayat, A.A.; Elara, M.R.; Wood, K. A metaheuristic approach to optimal morphology in reconfigurable tiling robots. Complex Intell. Syst. 2023, 9, 5831–5850. [Google Scholar] [CrossRef]
- Liu, W.; Duo, Y.; Chen, X.; Chen, B.; Bu, T.; Li, L.; Duan, J.; Zuo, Z.; Wang, Y.; Fang, B.; et al. An intelligent robotic system capable of sensing and describing objects based on bimodal, self-Powered Flexible Sensors. Adv. Funct. Mater. 2023, 33, 2306368. [Google Scholar] [CrossRef]
- Ham, J.; Han, A.K.; Cutkosky, M.R.; Bao, Z. UV-laser-machined stretchable multi-modal sensor network for soft robot interaction. NPJ Flex. Electron. 2022, 6, 94. [Google Scholar] [CrossRef]
- Xu, F.; Li, X.; Shi, Y.; Li, L.; Wang, W.; He, L.; Liu, R. Recent developments for flexible pressure sensors: A review. Micromachines 2018, 9, 580. [Google Scholar] [CrossRef] [PubMed]
- Centurelli, A.; Arleo, L.; Rizzo, A.; Tolu, S.; Laschi, C.; Falotico, E. Closed-loop dynamic control of a soft manipulator using deep reinforcement learning. IEEE Robot. Autom. Lett. 2022, 7, 4741–4748. [Google Scholar] [CrossRef]
- Agabiti, C.; Ménager, E.; Falotico, E. Whole-arm grasping strategy for soft arms to capture space debris. In Proceedings of the 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023; pp. 1–6. [Google Scholar]
- Morimoto, R.; Nishikawa, S.; Niiyama, R.; Kuniyoshi, Y. Model-free reinforcement learning with ensemble for a soft continuum robot arm. In Proceedings of the 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 12–16 April 2021; pp. 141–148. [Google Scholar]
- Youssef, S.M.; Soliman, M.; Saleh, M.A.; Elsayed, A.H.; Radwan, A.G. Design and control of soft biomimetic pangasius fish robot using fin ray effect and reinforcement learning. Sci. Rep. 2022, 12, 21861. [Google Scholar] [CrossRef] [PubMed]
- Schegg, P.; Ménager, E.; Khairallah, E.; Marchal, D.; Dequidt, J.; Preux, P.; Duriez, C. SofaGym: An open platform for reinforcement learning based on soft robot simulations. Soft Robot. 2023, 10, 410–430. [Google Scholar] [CrossRef] [PubMed]
- Naughton, N.; Sun, J.; Tekinalp, A.; Parthasarathy, T.; Chowdhary, G.; Gazzola, M. Elastica: A compliant mechanics environment for soft robotic control. IEEE Robot. Autom. Lett. 2021, 6, 3389–3396. [Google Scholar] [CrossRef]
- Graule, M.A.; McCarthy, T.P.; Teeple, C.B.; Werfel, J.; Wood, R.J. SoMoGym: A toolkit for developing and evaluating controllers and reinforcement learning algorithms for soft robots. IEEE Robot. Autom. Lett. 2022, 7, 4071–4078. [Google Scholar] [CrossRef]
- Bhatia, J.; Jackson, H.; Tian, Y.; Xu, J.; Matusik, W. Evolution gym: A large-scale benchmark for evolving soft robots. Adv. Neural Inf. Process. Syst. 2021, 34, 2201–2214. [Google Scholar]
- Min, S.; Won, J.; Lee, S.; Park, J.; Lee, J. SoftCon: Simulation and control of soft-bodied animals with biomimetic actuators. ACM Trans. Graph. 2019, 38, 208:1–208:12. [Google Scholar] [CrossRef]
- Bai, S.; Chen, F.; Englot, B. Toward autonomous mapping and exploration for mobile robots through deep supervised learning. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2379–2384. [Google Scholar]
- Jitosho, R.; Lum, T.G.W.; Okamura, A.; Liu, K. Reinforcement learning enables real-time planning and control of agile maneuvers for soft robot arms. In Proceedings of the 7th Conference on Robot Learning (CoRL 2023), PMLR, Atlanta, GA, USA, 6–9 November 2023; pp. 1131–1153. [Google Scholar]
- Zhang, R.; Lv, J.; Li, J.; Bao, J.; Zheng, P.; Peng, T. A graph-based reinforcement learning-enabled approach for adaptive human-robot collaborative assembly operations. J. Manuf. Syst. 2022, 63, 491–503. [Google Scholar] [CrossRef]
- Haarnoja, T.; Zhou, A.; Hartikainen, K.; Tucker, G.; Ha, S.; Tan, J.; Kumar, V.; Zhu, H.; Gupta, A.; Abbeel, P.; et al. Soft actor-critic algorithms and applications. arXiv 2018, arXiv:1812.05905. [Google Scholar]
- Charbuty, B.; Mohsin Abdulazeez, A. Classification based on decision tree algorithm for machine learning. J. Appl. Sci. Technol. Trends 2021, 2, 20–28. [Google Scholar] [CrossRef]
- Berrueta, T.A.; Murphey, T.D.; Truby, R.L. Materializing autonomy in soft robots across Scales. Adv. Intell. Syst. 2023, 6, 2300111. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noun | Definition | Emphasis |
|---|---|---|
| Computational Intelligence | A method imitating natural intelligence, including neural networks, evolutionary algorithms, fuzzy systems, and machine learning [11,12,13]. | Solving complex computational problems. |
| Physical Intelligence | Encode sensing, actuation, control, logic, and computing intelligence into the robot’s body [14]. | Reduce costs. Response speed. Enhance robustness. |
| Perceptual Intelligence | Perceptual intelligence allows machines to sense and interpret the environment, covering senses like sight, hearing, and touch [15]. | Accurate information acquisition. |
| Cognitive Intelligence | The ability of machines to simulate or mimic human cognitive behaviors, including understanding, thinking, and reasoning [16,17]. | Enabling machines to understand and utilize knowledge. |
| Morphological Intelligence | An intelligent robot’s shape affects how it interacts with its surroundings and its smart actions. | Used for simplifying control and data processing. |
| Embodied Intelligence | Emphasizing the interaction with the environment, integrating complex processes such as perception, learning, decision making, and action, surpassing mere physical movements. | Intelligent systems tightly integrate with their physical environment. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Wu, Q.; Wang, J.; Zhang, B.; Zhong, C.; Zhilenkov, A.A. Exploring Embodied Intelligence in Soft Robotics: A Review. Biomimetics 2024, 9, 248. https://doi.org/10.3390/biomimetics9040248
Zhao Z, Wu Q, Wang J, Zhang B, Zhong C, Zhilenkov AA. Exploring Embodied Intelligence in Soft Robotics: A Review. Biomimetics. 2024; 9(4):248. https://doi.org/10.3390/biomimetics9040248
Chicago/Turabian StyleZhao, Zikai, Qiuxuan Wu, Jian Wang, Botao Zhang, Chaoliang Zhong, and Anton A. Zhilenkov. 2024. "Exploring Embodied Intelligence in Soft Robotics: A Review" Biomimetics 9, no. 4: 248. https://doi.org/10.3390/biomimetics9040248
APA StyleZhao, Z., Wu, Q., Wang, J., Zhang, B., Zhong, C., & Zhilenkov, A. A. (2024). Exploring Embodied Intelligence in Soft Robotics: A Review. Biomimetics, 9(4), 248. https://doi.org/10.3390/biomimetics9040248