
Stair-Climbing Wheeled Robot Based on Rotating Locomotion of Curved-Spoke Legs


Abstract
1. Introduction
2. Materials and Methods
3. Results
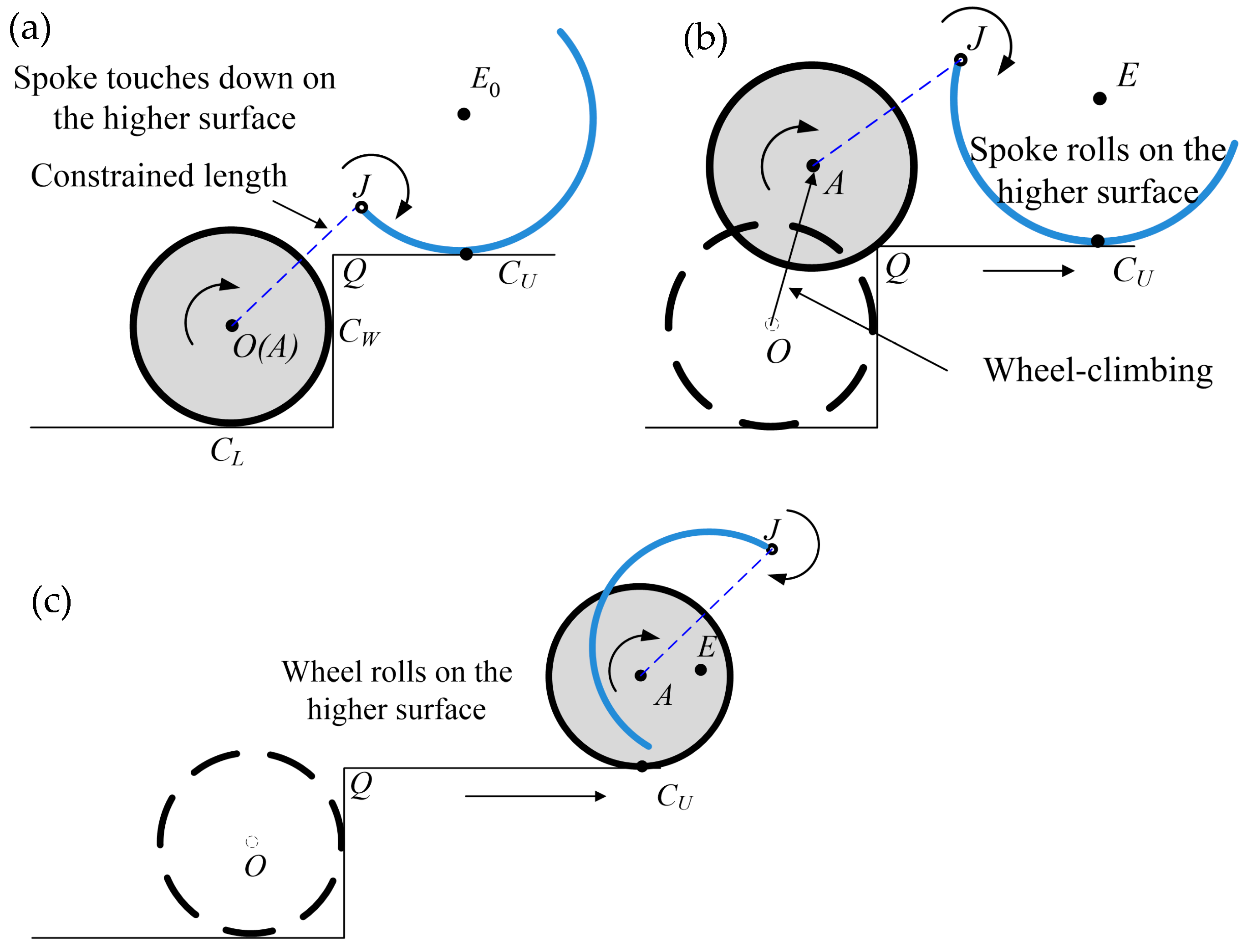
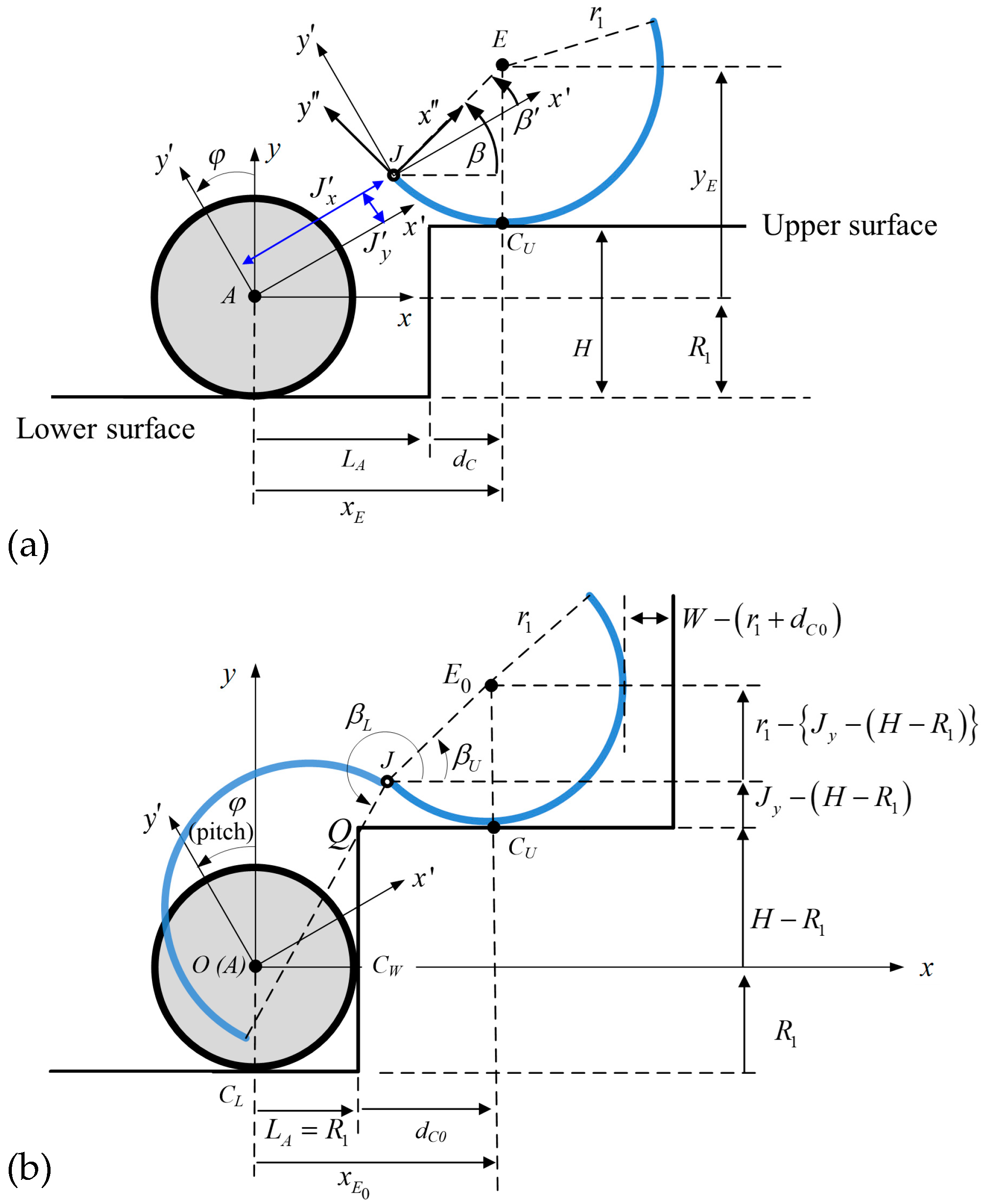
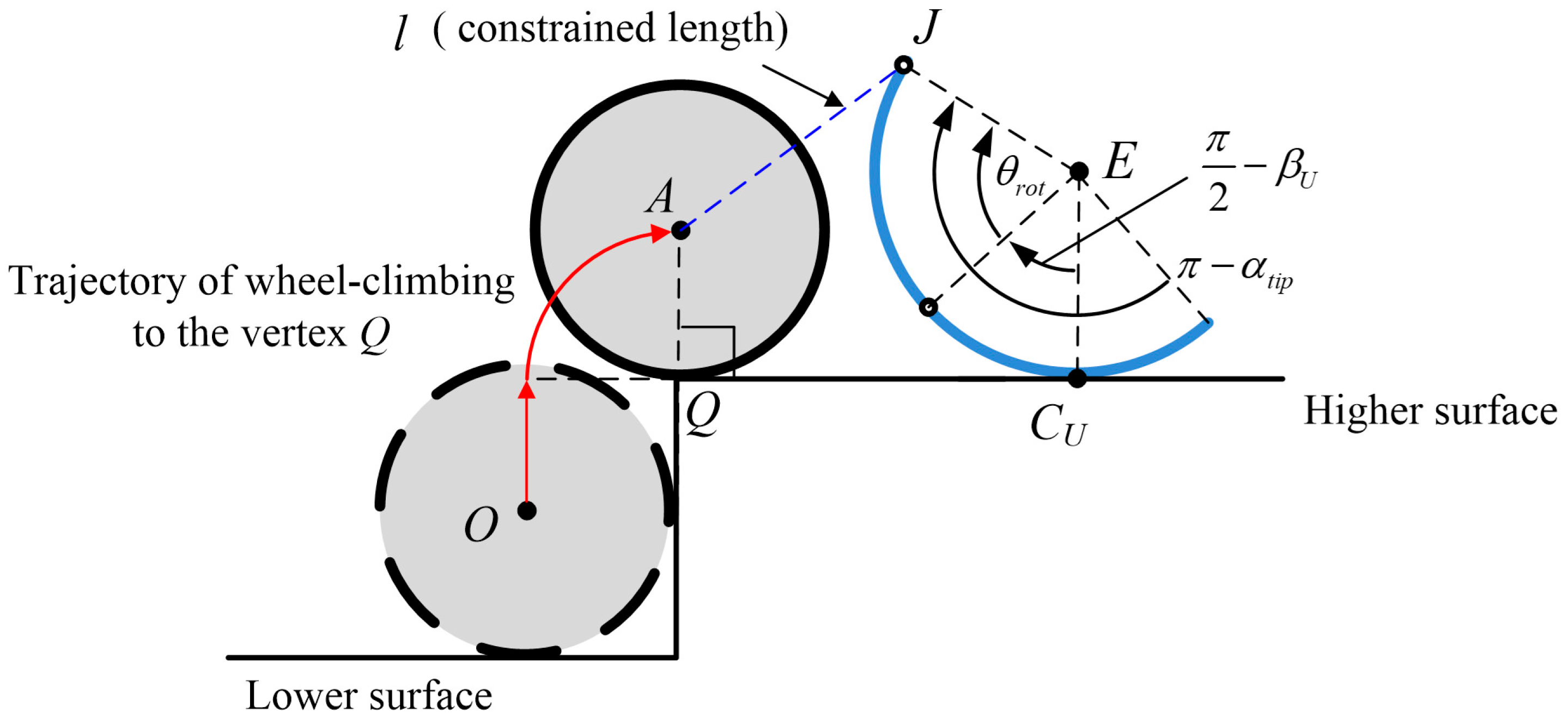
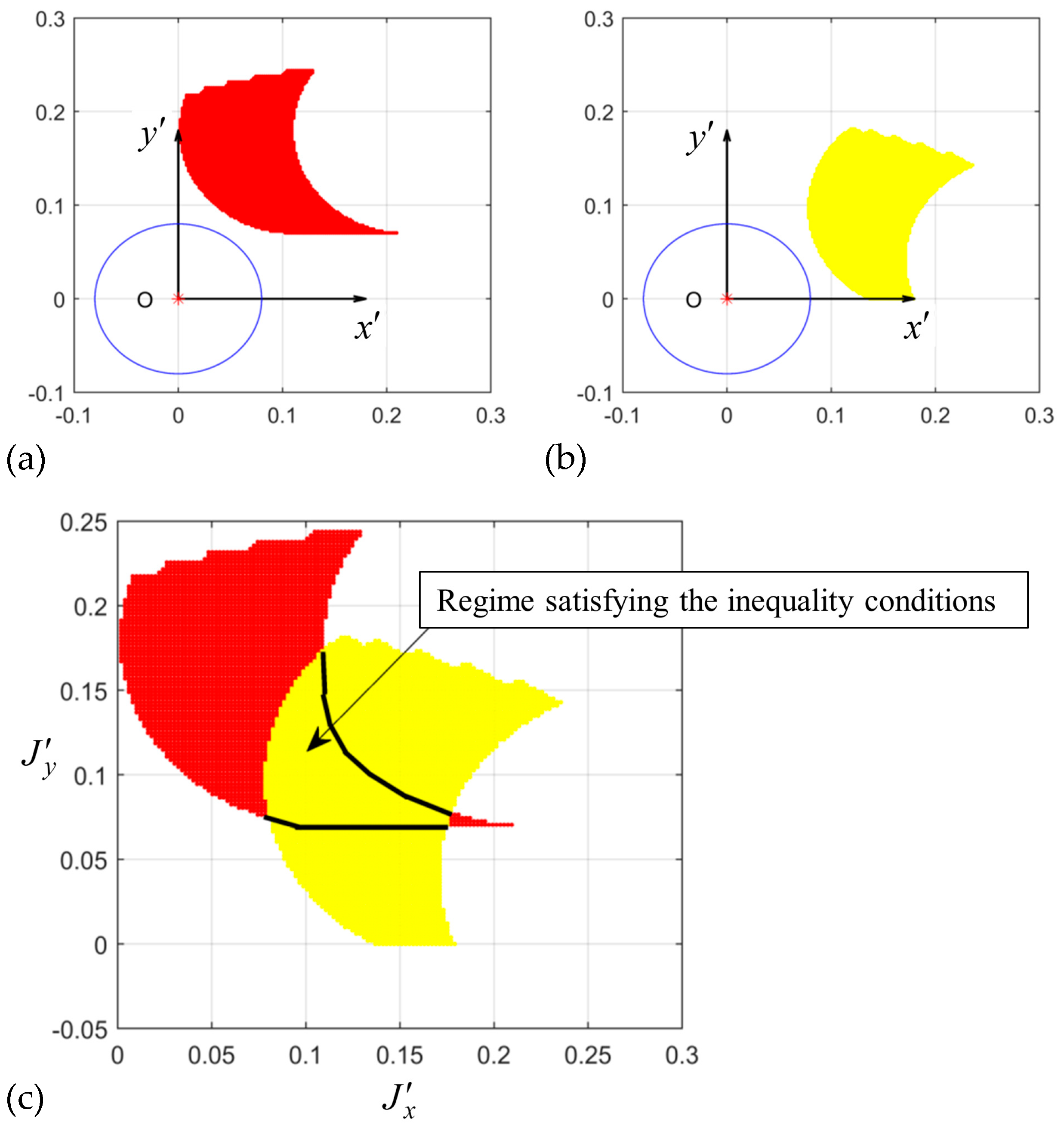
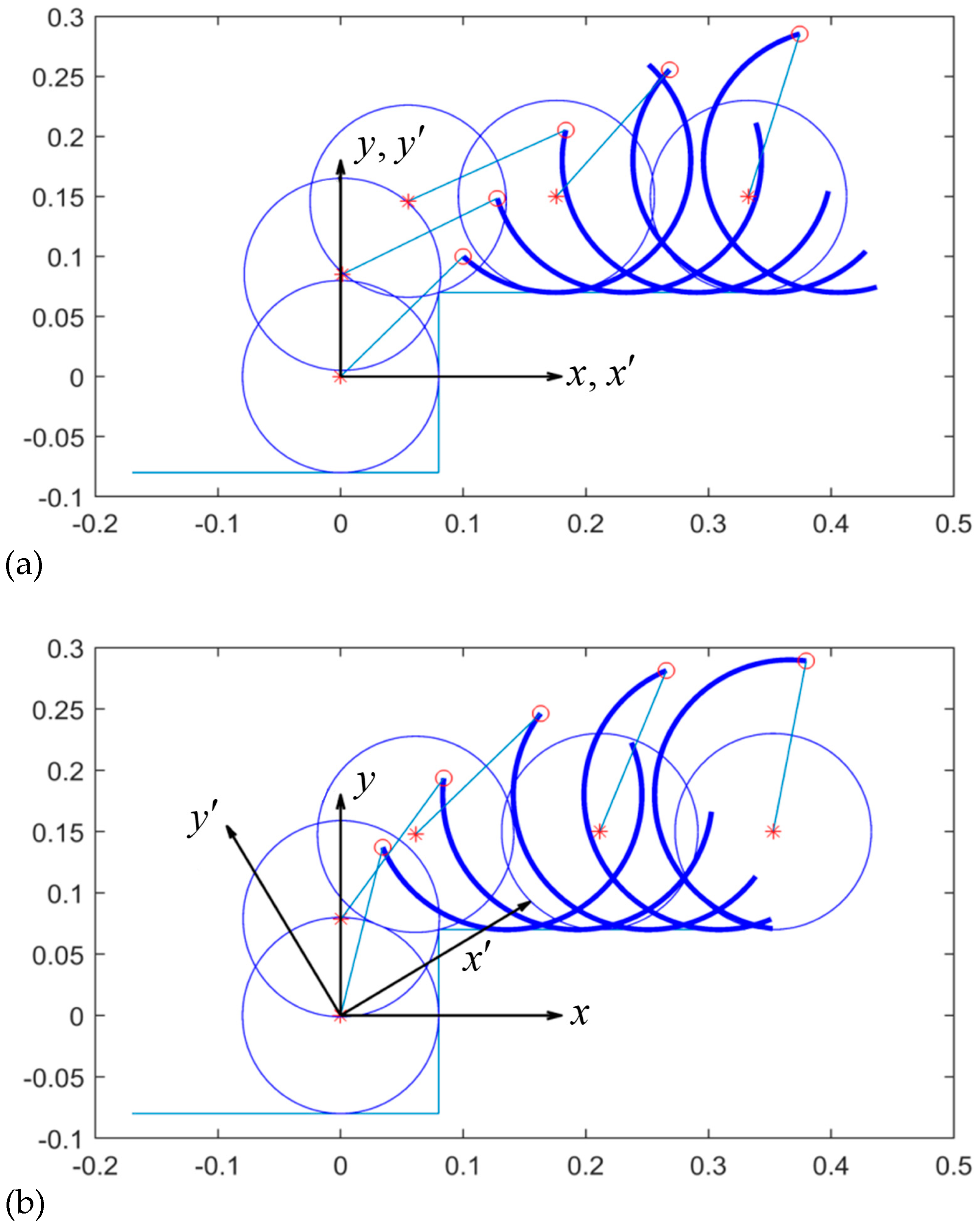
3.1. Kinematic Results for the Single-Wheel Climbing
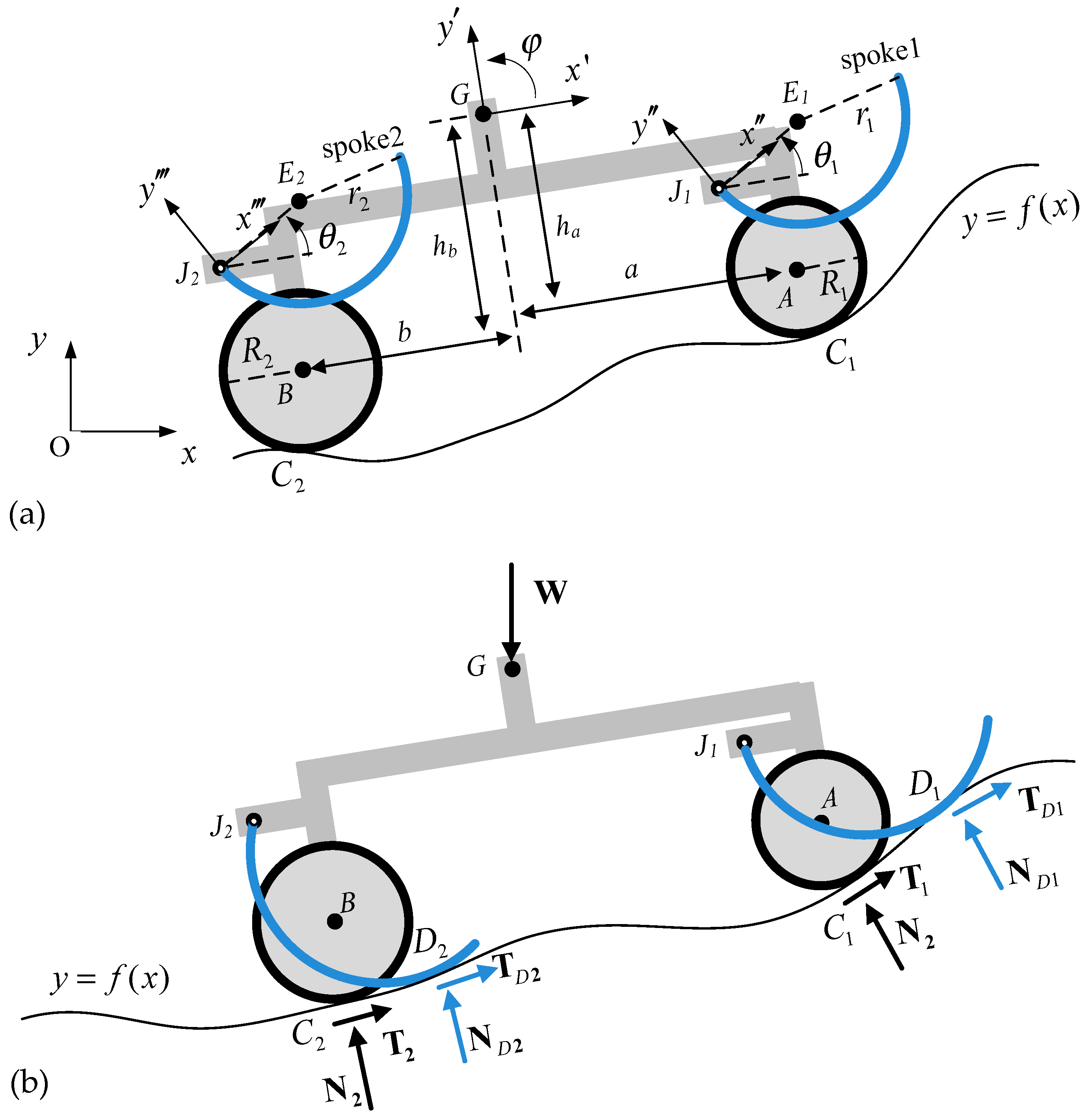
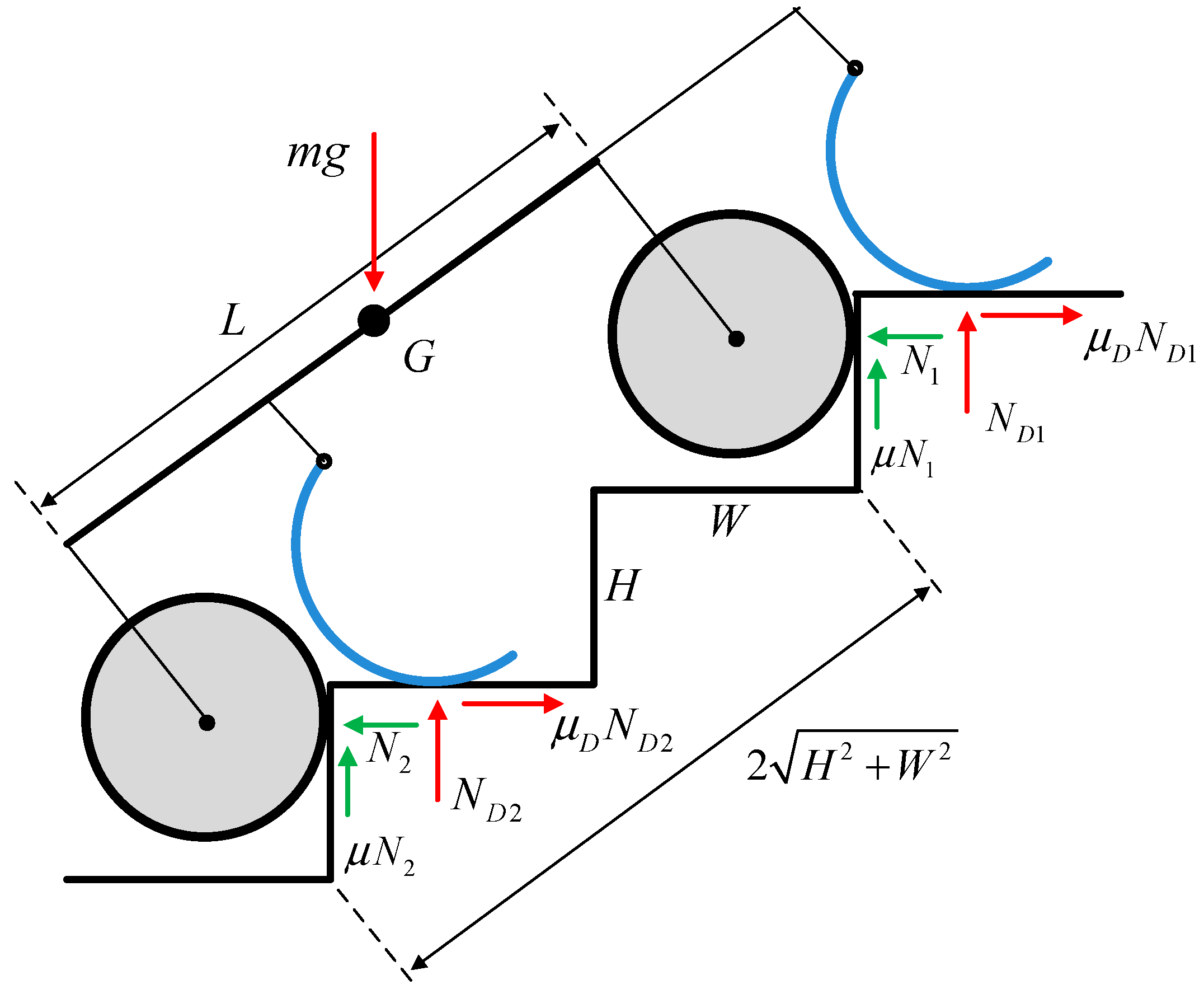
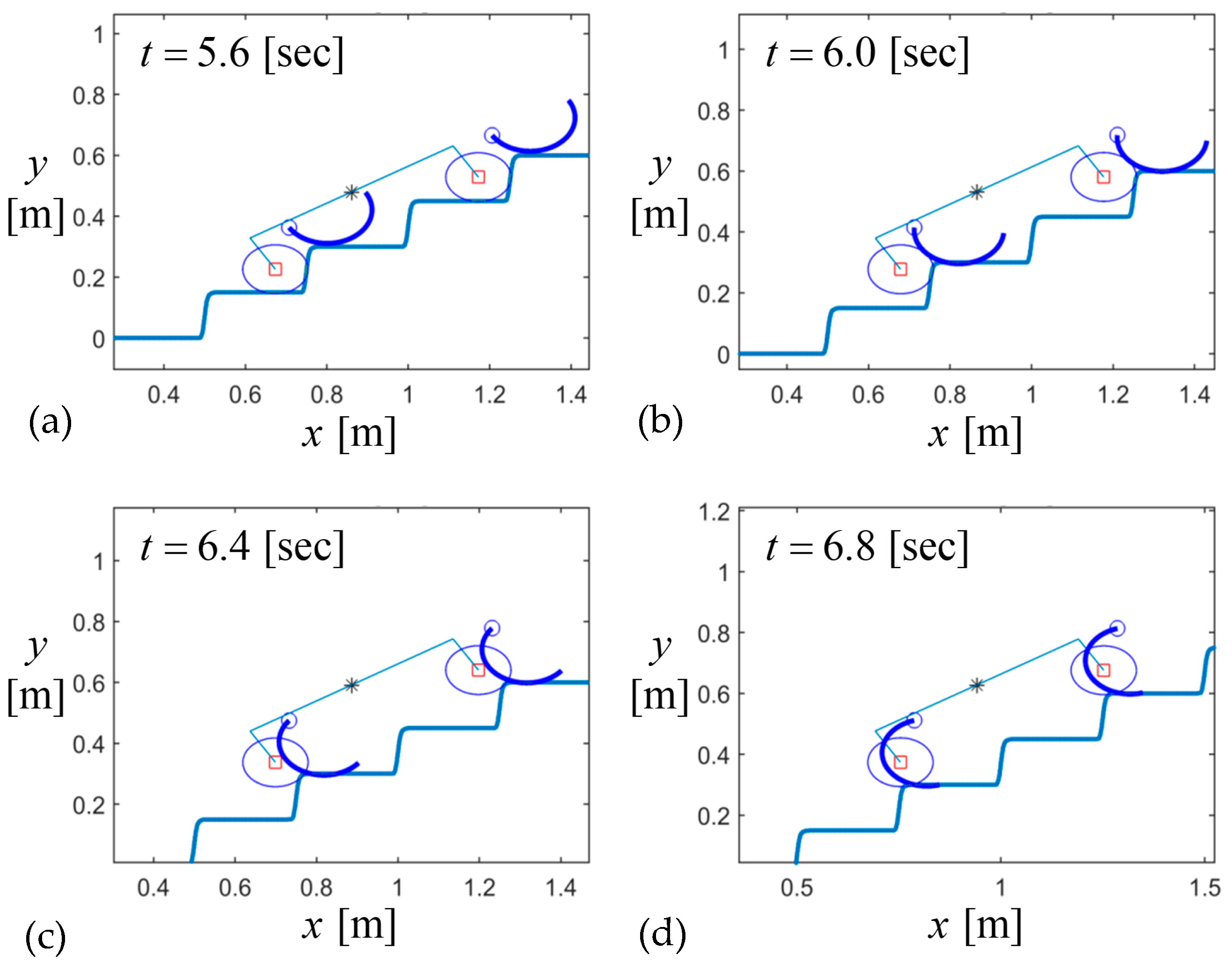
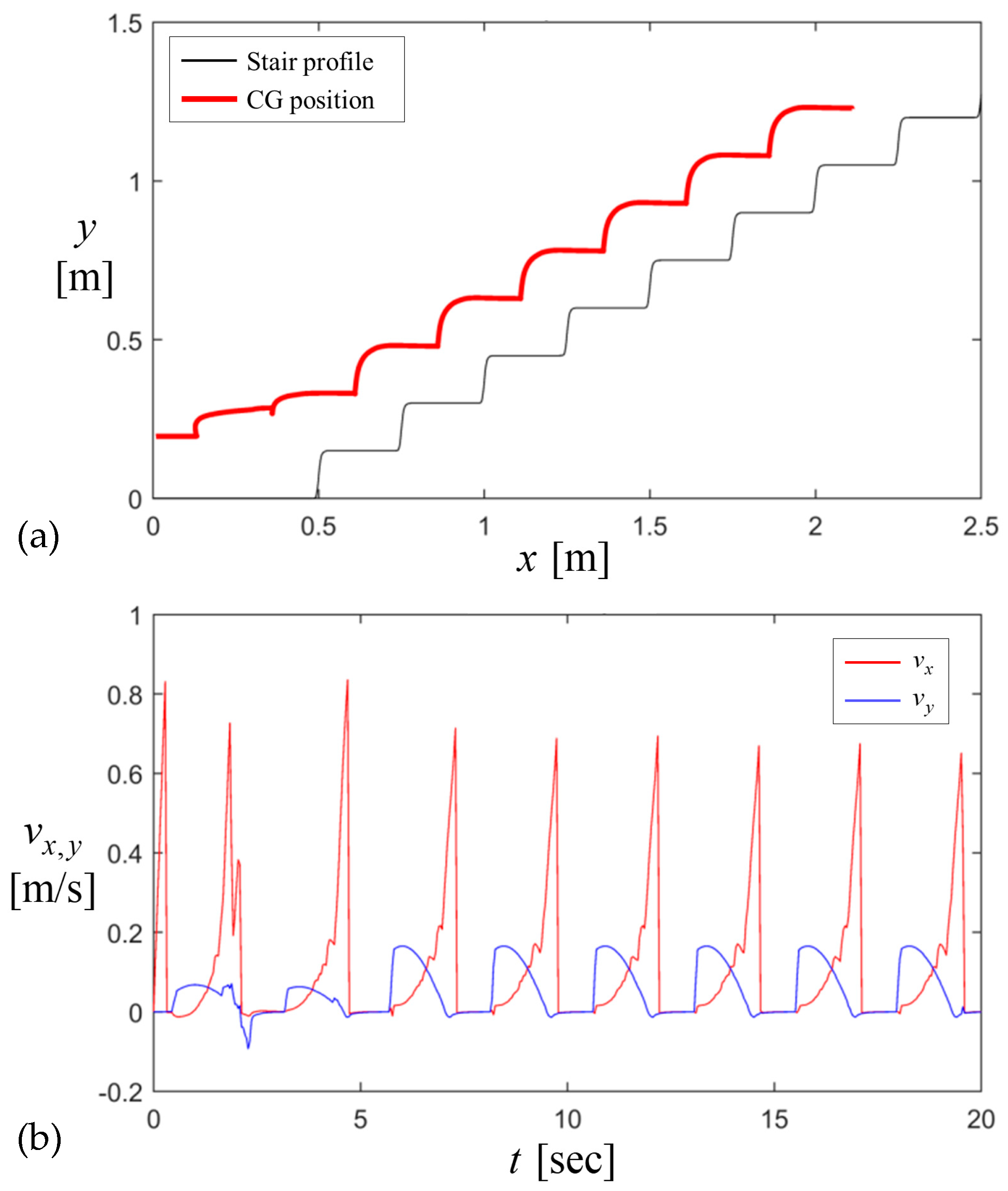
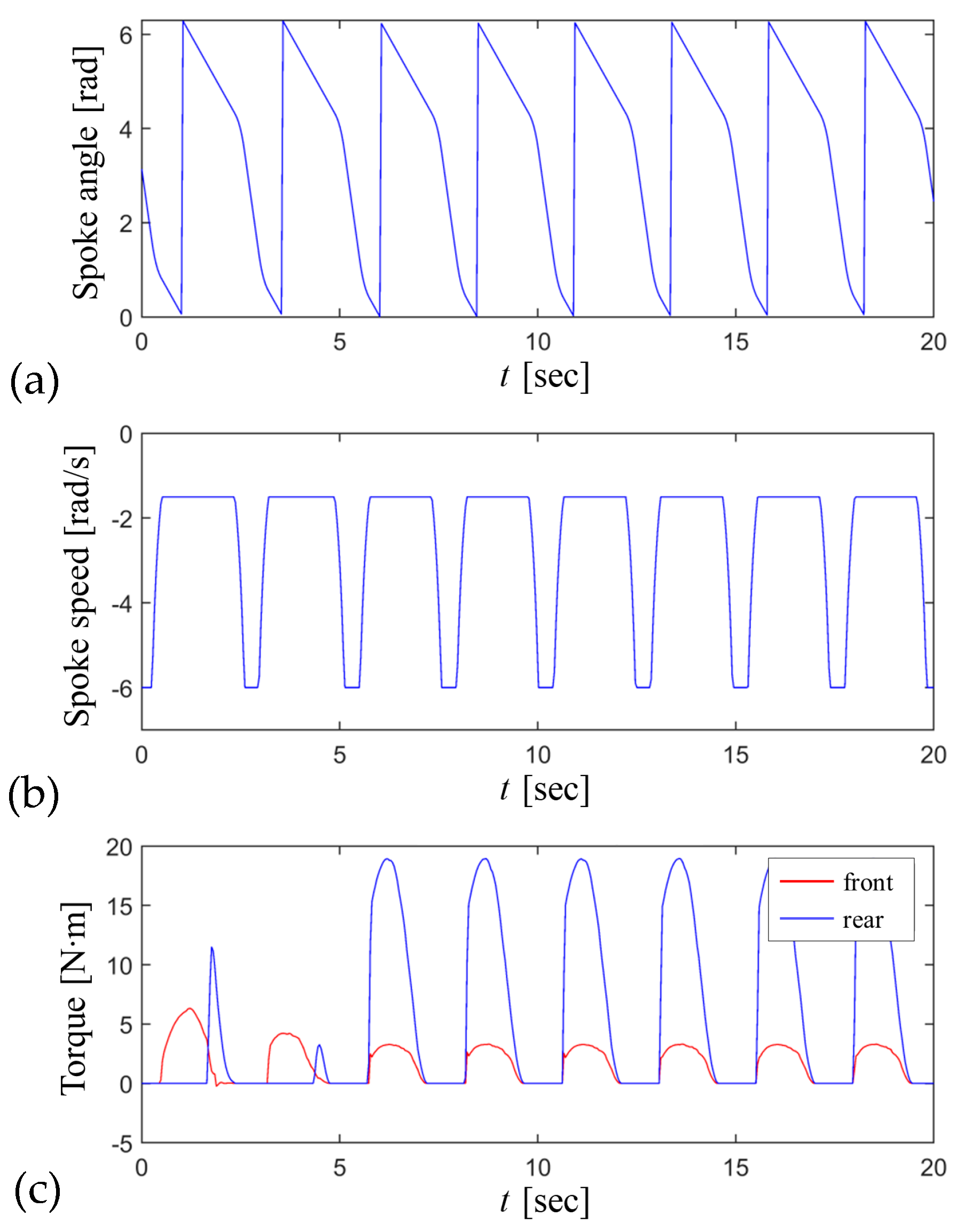
3.2. Dynamic Results for the Stair Climbing of the Whole Robot
4. Discussion
- −
- Wheel climbing can be achieved by utilizing a curved-spoke leg.
- −
- Wheel climbing is a necessary condition for the stair climbing of the whole robot.
- −
- The spoke position relative to a wheel should be carefully determined for both the flat and slant robot using the proposed kinematic inequality constraints.
- −
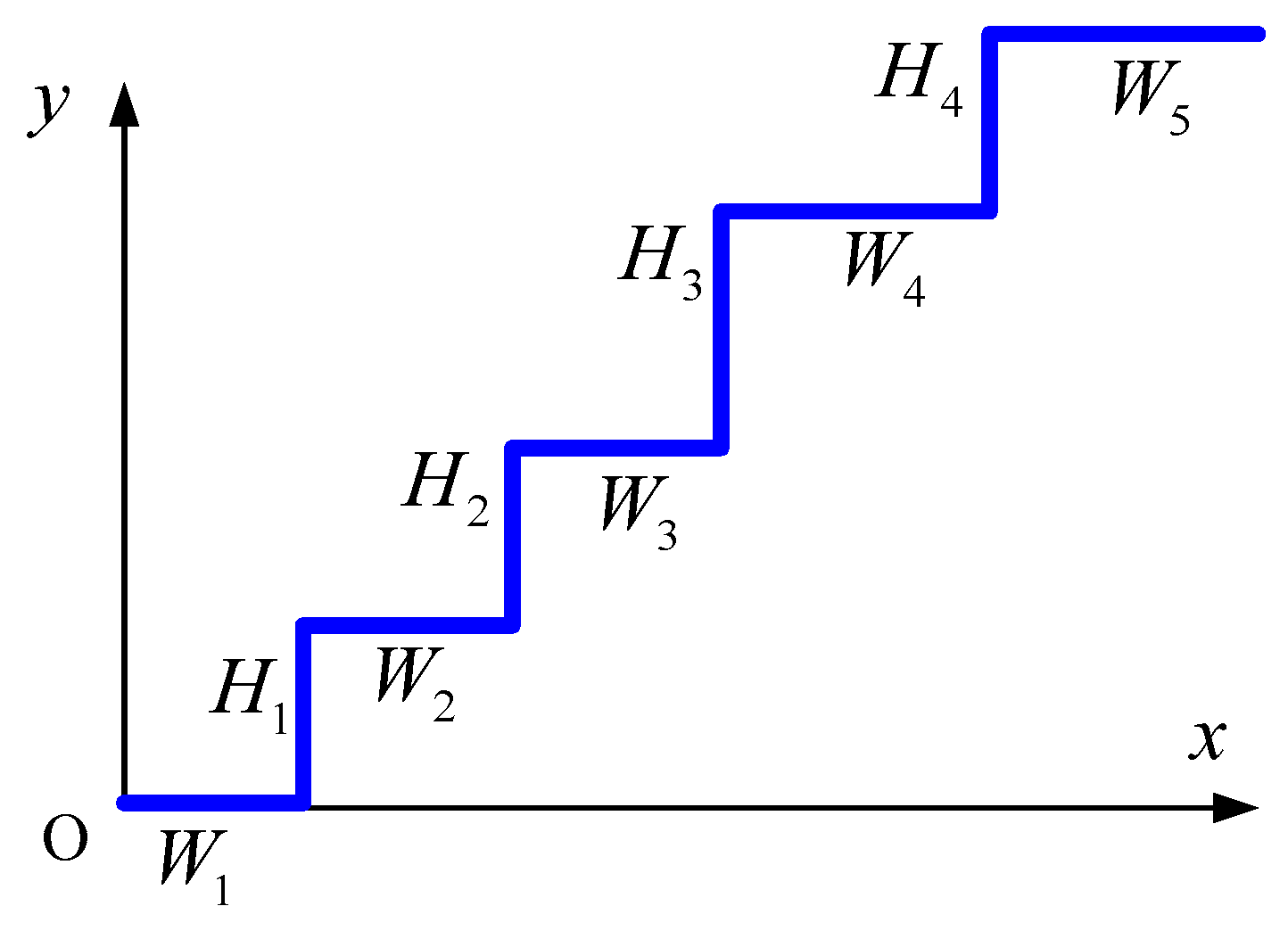
- The proposed robot could effectively climb a given stair geometry if the curved-spoke leg is well defined under the kinematic inequality conditions, and the wheelbases are adjusted to the hypotenuse of several steps.
- −
- The required minimum friction coefficient for the static state of stair climbing is very low for wheel-spoke leg locomotion if the kinematic wheel-climbing conditions are met.
Author Contributions
Funding
Conflicts of Interest
References
- Seo, T.; Ryu, S.; Won, J.H.; Kim, Y.; Kim, H.S. Stair-Climbing Robots: A Review on Mechanism, Sensing, and Performance Evaluation. IEEE Access 2023, 11, 60539–60561. [Google Scholar] [CrossRef]
- Pappalettera, A.; Bottiglione, F.; Mantriota, G.; Reina, G. Watch the Next Step: A Comprehensive Survey of Stair-Climbing Vehicles. Robotics 2023, 12, 74. [Google Scholar] [CrossRef]
- Sundaram, S.A.; Wang, H.; Ding, D.; Cooper, R.A. Step-Climbing Power Wheelchairs: A Literature Review. Top. Spinal Cord Inj. Rehabil. 2017, 23, 98–109. [Google Scholar] [CrossRef] [PubMed]
- Verma, A.; Shrivastava, S.; Ramkumar, J. Mapping wheelchair functions and their associated functional elements for stair climbing accessibility: A systematic review. Disabil. Rehabil. Assist. Technol. 2022, 19, 200–221. [Google Scholar] [CrossRef]
- Park, W.-S.; Park, M.-S.; Yang, H.-W. The optimal design scheme of an SUGV for surveillance and reconnaissance missions in urban and rough terrain. Int. J. Control Autom. Syst. 2012, 10, 992–999. [Google Scholar] [CrossRef]
- Lee, J.; Jeong, W.; Han, J.; Kim, T.; Oh, S. Barrier-Free Wheelchair with a Mechanical Transmission. Appl. Sci. 2021, 11, 5280. [Google Scholar] [CrossRef]
- Phannil, N.; Jettanasen, C. Design and Simulation of Removable Pavement Edge Climbing Electric Wheelchair for Elderly and Disabled Users. Int. J. Control Autom. Syst. 2023, 21, 1910–1925. [Google Scholar] [CrossRef]
- Meyer, J.T.; Weber, S.; Jäger, L.; Sigrist, R.; Gassert, R.; Lambercy, O. A survey on the influence of CYBATHLON on the development and acceptance of advanced as-sistive technologies. J. Neuroeng. Rehabil. 2022, 19, 38. [Google Scholar] [CrossRef]
- Kim, J.-Y.; Park, I.-W.; Oh, J.-H. Experimental Realization of Dynamic Stair Climbing and Descending of Biped Humanoid Robot, Hubo. Int. J. Humanoid Robot. 2009, 6, 205–240. [Google Scholar] [CrossRef]
- Jung, T.; Lim, J.; Bae, H.; Lee, K.K.; Joe, H.-M.; Oh, J.-H. Development of the Humanoid Disaster Response Platform DRC-HUBO+. IEEE Trans. Robot. 2018, 34, 1–17. [Google Scholar] [CrossRef]
- Dong, E.Z.; Wang, D.D.; Tong, J.G.; Chen, C.; Wang, Z.H. A Stable Gait Planning Method of Biped Robot Based on Ankle motion Smooth Fitting. Int. J. Control Autom. Syst. 2018, 16, 284–294. [Google Scholar] [CrossRef]
- Yong, S.; Teng, C.; Yanzhe, H.; Xiaoli, W. Implementation and dynamic gait planning of a quadruped bionic robot. Int. J. Control Autom. Syst. 2017, 15, 2819–2828. [Google Scholar] [CrossRef]
- Hyun, D.J.; Seok, S.; Lee, J.; Kim, S. High speed trot-running: Implementation of a hierarchical controller using proprioceptive impedance control on the MIT Cheetah. Int. J. Robot. Res. 2014, 33, 1417–1445. [Google Scholar] [CrossRef]
- Seok, S.; Wang, A.; Chuah, M.Y.; Hyun, D.J.; Lee, J.; Otten, D.M.; Lang, J.H.; Kim, S. Design Principles for Energy-Efficient Legged Locomotion and Implementation on the MIT Cheetah Robot. IEEE/ASME Trans. Mechatron. 2014, 20, 1117–1129. [Google Scholar] [CrossRef]
- Park, H.-W.; Wensing, P.M.; Kim, S. High-speed bounding with the MIT Cheetah 2: Control design and experiments. Int. J. Robot. Res. 2017, 36, 167–192. [Google Scholar] [CrossRef]
- Bhardwaj, G.; Sukavanam, N.; Raman, B. Fast terminal discrete-time sliding mode control with fuzzy-based impedance modulation for toe foot bipedal robot going upstairs. Int. J. Control Autom. Syst. 2023, 21, 1659–1669. [Google Scholar] [CrossRef]
- Bhole, A.; Turlapati, S.H.; Rajashekhar, V.S.; Dixit, J.; Shah, S.V.; Krishna, K.M. Design of a robust stair-climbing compliant modular robot to tackle overhang on stairs. Robotica 2018, 37, 428–444. [Google Scholar] [CrossRef]
- Lawn, M.; Ishimatsu, T. Modeling of a stair-climbing wheelchair mechanism with high single-step capacity. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 323–332. [Google Scholar] [CrossRef]
- Quaglia, G.; Franco, W.; Oderio, R. Wheelchair.q, a motorized wheelchair with stair climbing ability. Mech. Mach. Theory 2011, 46, 1601–1609. [Google Scholar] [CrossRef]
- Park, S.; Ahn, S.; Shin, J.; Kim, H.; Yang, J.; Kim, Y.; Lim, K.; Seo, T. WAVE: Last Mile Delivery Robotic Platform with Stair-Climbing Ability Via Four-Bar Linkage-Based Locomotion. IEEE/ASME Trans. Mechatron. 2023, 29, 313–323. [Google Scholar] [CrossRef]
- Tian, Y.; Gao, F. Efficient motion generation for a six-legged robot walking on irregular terrain via integrated foothold selection and optimization-based whole-body planning. Robotica 2017, 36, 333–352. [Google Scholar] [CrossRef]
- Kim, D.; Hong, H.; Kim, H.S.; Kim, J. Optimal design and kinetic analysis of a stair-climbing mobile robot with rocker-bogie mechanism. Mech. Mach. Theory 2012, 50, 90–108. [Google Scholar] [CrossRef]
- Choi, D.; Oh, J.; Kim, J. Analysis method of climbing stairs with the rocker-bogie mechanism. J. Mech. Sci. Technol. 2013, 27, 2783–2788. [Google Scholar] [CrossRef]
- Eich, M.; Grimminger, F.; Kirchner, F. Adaptive compliance control of a multi-legged stair-climbing robot based on proprioceptive data. Ind. Robot. Int. J. Robot. Res. Appl. 2009, 36, 331–339. [Google Scholar] [CrossRef]
- Chen, W.-H.; Lin, H.-S.; Lin, Y.-M.; Lin, P.-C. TurboQuad: A Novel Leg–Wheel Transformable Robot with Smooth and Fast Behavioral Transitions. IEEE Trans. Robot. 2017, 33, 1025–1040. [Google Scholar] [CrossRef]
- Ramadan, M.; Hilles, S.; Alkhedher, M. Design and study of an AI-supported autonomous stair climbing robot. EI-Cezeri J. Sci. Eng. 2023, 10, 571–585. [Google Scholar]
- Kim, Y.; Kim, J.; Kim, H.S.; Seo, T. Curved-Spoke Tri-Wheel Mechanism for Fast Stair-Climbing. IEEE Access 2019, 7, 173766–173773. [Google Scholar] [CrossRef]
- Altendorfer, R.; Moore, N.; Komsuoglu, H.; Buehler, M.; Brown, H.B., Jr.; McMordie, D.; Saranli, U.; Full, R.; Koditschek, D. RHex: A Biologically Inspired Hexapod Runner. Auton. Robot. 2001, 11, 207–213. [Google Scholar] [CrossRef]
- Cui, T.; Wang, W.; Zhu, Z.; Wu, J.; Jia, Z. A stair-climbing robot with star-wheel configuration. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Jinghong, China, 5–9 December 2022; pp. 542–548. [Google Scholar]
- Shin, J.; Son, D.; Kim, Y.; Seo, T. Design exploration and comparative analysis of tail shape of tri-wheel-based stair-climbing robotic platform. Sci. Rep. 2022, 12, 1–19. [Google Scholar] [CrossRef]
- Wu, G.; Wu, L.; Wang, H.; Yang, W.; Wang, Z.; Zhang, Z.; Shen, T. Design and study of a stair climbing robots with two wheels and a “4R+2P” pattern. Machines 2022, 10, 631. [Google Scholar] [CrossRef]
- Arunkumar, A.; Ramabalan, S.; Elayaraja, D. Optimum Design of Stair-Climbing Robots Using Taguchi Method. Intell. Autom. Soft Comput. 2023, 35, 1229–1244. [Google Scholar] [CrossRef]
- Shin, J.; Kim, Y.; Kim, D.-Y.; Yoon, G.H.; Seo, T. Parametric Design Optimization of a Tail Mechanism Based on Tri-Wheels for Curved Spoke-Based Stair-Climbing Robots. Int. J. Precis. Eng. Manuf. 2023, 24, 1205–1220. [Google Scholar] [CrossRef]
- Sasaki, K.; Suzuki, K. Active rotary-legs mechanism for stair-climbing mobility robot. IEEE Robot. Autom. Lett. 2018, 3, 2237–2244. [Google Scholar] [CrossRef]
- Sasaki, K.; Eguchi, Y.; Suzuki, K. Stair-climbing wheelchair with lever propulsion control of rotary legs. Adv. Robot. 2020, 34, 802–813. [Google Scholar] [CrossRef]
- Ordoñez-Avila, J.L.; Moreno, H.A.; Perdomo, M.E.; Calderón, I.G.C. Designing Legged Wheels for Stair Climbing. Symmetry 2023, 15, 2071. [Google Scholar] [CrossRef]
- Tang, J.; Yao, S.; Liu, R.; Yao, Y.-A. A Schatz-based omnidirectional mobile mechanism with Oloid-like paddlewheels. Mech. Mach. Theory 2023, 189, 105434. [Google Scholar] [CrossRef]
- Siegwart, R.; Lamon, P.; Estier, T.; Lauria, M.; Piguet, R. Innovative design for wheeled locomotion in rough terrain. Robot. Auton. Syst. 2002, 40, 151–162. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unit |
|---|---|---|
| m | 30 | kg |
| R | 0.08 | m |
| r | 0.11 | m |
| H | 0.15 | m |
| W | 0.25 | m |
| 1.0 × 106 | N/m2 | |
| 1.0 × 106 | N/m2 | |
| 2.5 × 105 | Ns/m2 | |
| 2.5 × 105 | Ns/m2 | |
| 0.3 | - | |
| 0.3 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, D.; Kang, J. Stair-Climbing Wheeled Robot Based on Rotating Locomotion of Curved-Spoke Legs. Biomimetics 2024, 9, 633. https://doi.org/10.3390/biomimetics9100633
Seo D, Kang J. Stair-Climbing Wheeled Robot Based on Rotating Locomotion of Curved-Spoke Legs. Biomimetics. 2024; 9(10):633. https://doi.org/10.3390/biomimetics9100633
Chicago/Turabian StyleSeo, Dongwoo, and Jaeyoung Kang. 2024. "Stair-Climbing Wheeled Robot Based on Rotating Locomotion of Curved-Spoke Legs" Biomimetics 9, no. 10: 633. https://doi.org/10.3390/biomimetics9100633
APA StyleSeo, D., & Kang, J. (2024). Stair-Climbing Wheeled Robot Based on Rotating Locomotion of Curved-Spoke Legs. Biomimetics, 9(10), 633. https://doi.org/10.3390/biomimetics9100633