
Research on Self-Stiffness Adjustment of Growth-Controllable Continuum Robot (GCCR) Based on Elastic Force Transmission

Abstract
1. Introduction
1.1. Background and Previous Work
- Active stiffness adjustment: It requires an additional structure or mechanism to lock the robot actively, which can be understood as active stiffness adjustment;
- Passive stiffness adjustment: Based on the motion characteristics of the robot, stiffness adjustment is achieved without introducing additional actuation components;
- Lightweight design: The use of lightweight materials can effectively reduce the impact of robot weight on motion accuracy in gravity; continuum robots with gradually changing diameters can effectively shorten the distance between the center of mass and fixed end;
- Kinematics compensation: To fit the target by changing the actuation displacement initiative by kinematics algorithms.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Stiffness Adjustment Method | Robot Length (m) | End Load (N) | Deflection (m) | Stiffness (N/mm) | Increase Percent (%) | Actuation for Stiffness Adjustment |
|---|---|---|---|---|---|---|---|
| Yang et al. [29] | Locking mechanism | 0.88 | 3 | 0.135 | 0.037 | 187 | Independent |
| Kang et al. [31] | - | - | - | - | - | Independent | |
| Ours | 0.2–0.75 | 5 | 0.018 | 0.032 | 80 | Coupled | |
| Kim et al. [15] | Layer jamming | 0.44 | 3.8 | 0.02 | 0.198 | 90 | Independent |
| Li et al. [32] | 0.063 | 1.1 | 0.024 | 0.046 | 540 | Independent | |
| Wei et al. [33] | Particle jamming | 0.15 | 3.5 | 0.014 | 0.259 | 900 | Independent |
| Cianchetti et al. [14] | 0.050 | 4.1 | 0.016 | 0.256 | 36 | Independent | |
| Kim et al. [34] | Antagonistic actuation | 0.087 | 5 | 0.01 | 0.484 | 198 | Independent |
| Zhao et al. [9] | Inserting rigid rod | 0.315 | - | - | 2.71 | 983 | Independent |
1.2. Contribution
- A stiffness adjustment mechanism (SAM) is proposed and built in a growth-controllable continuum robot (GCCR) to improve the motion accuracy in variable scale motion.
- A statistics model that considers the weight of the robot and the end load is constructed and the shape of the robot can be predicted.
- Experimental testing is carried out to investigate the effect of the proposed SAM, modeling errors, and stiffness enhancement. The results provide efficacious insights to improve the design of the stiffness adjustment mechanism.
1.3. Outline
2. Generalized Growth-Controllable Continuum Robot
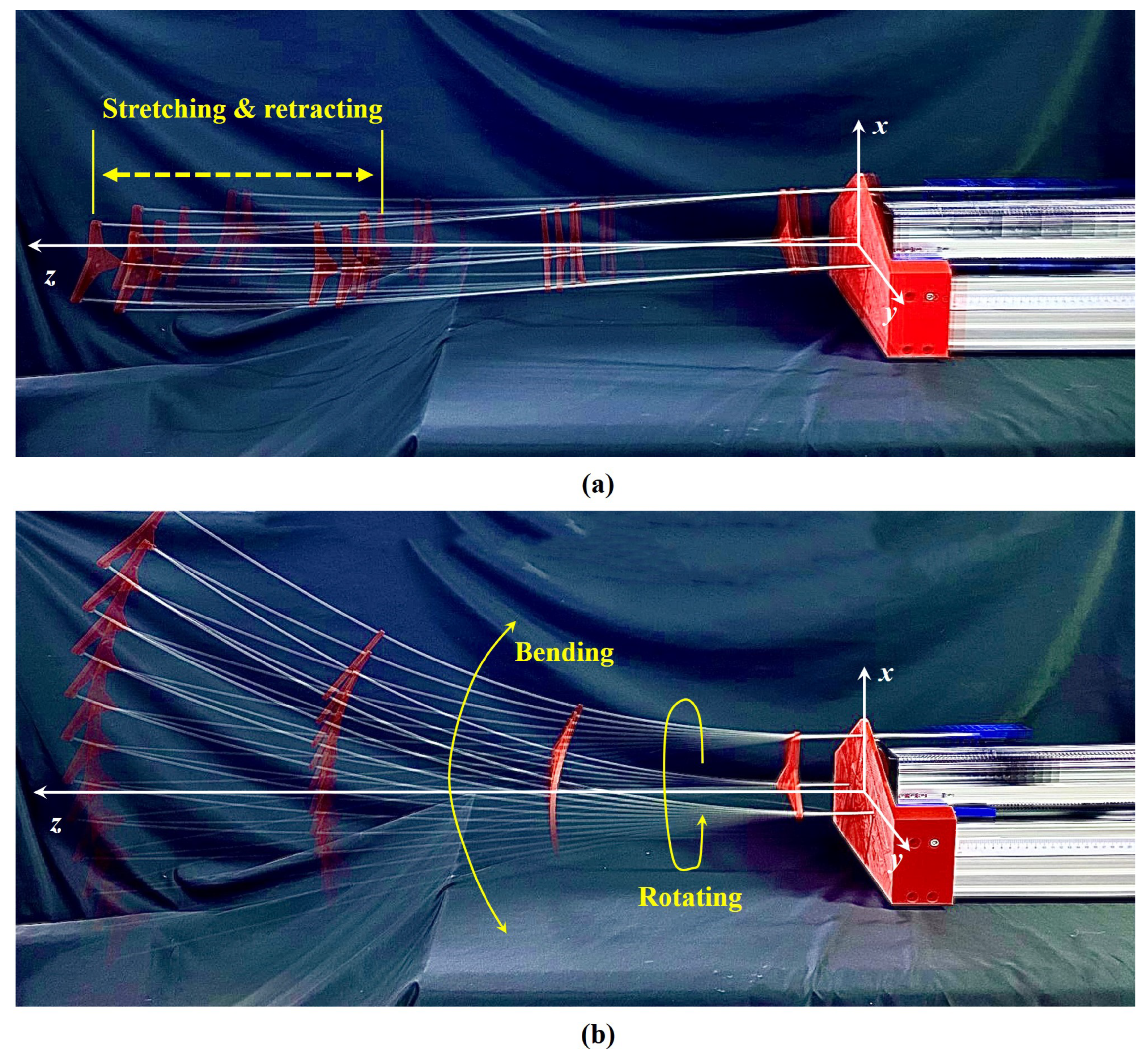
2.1. Configuration
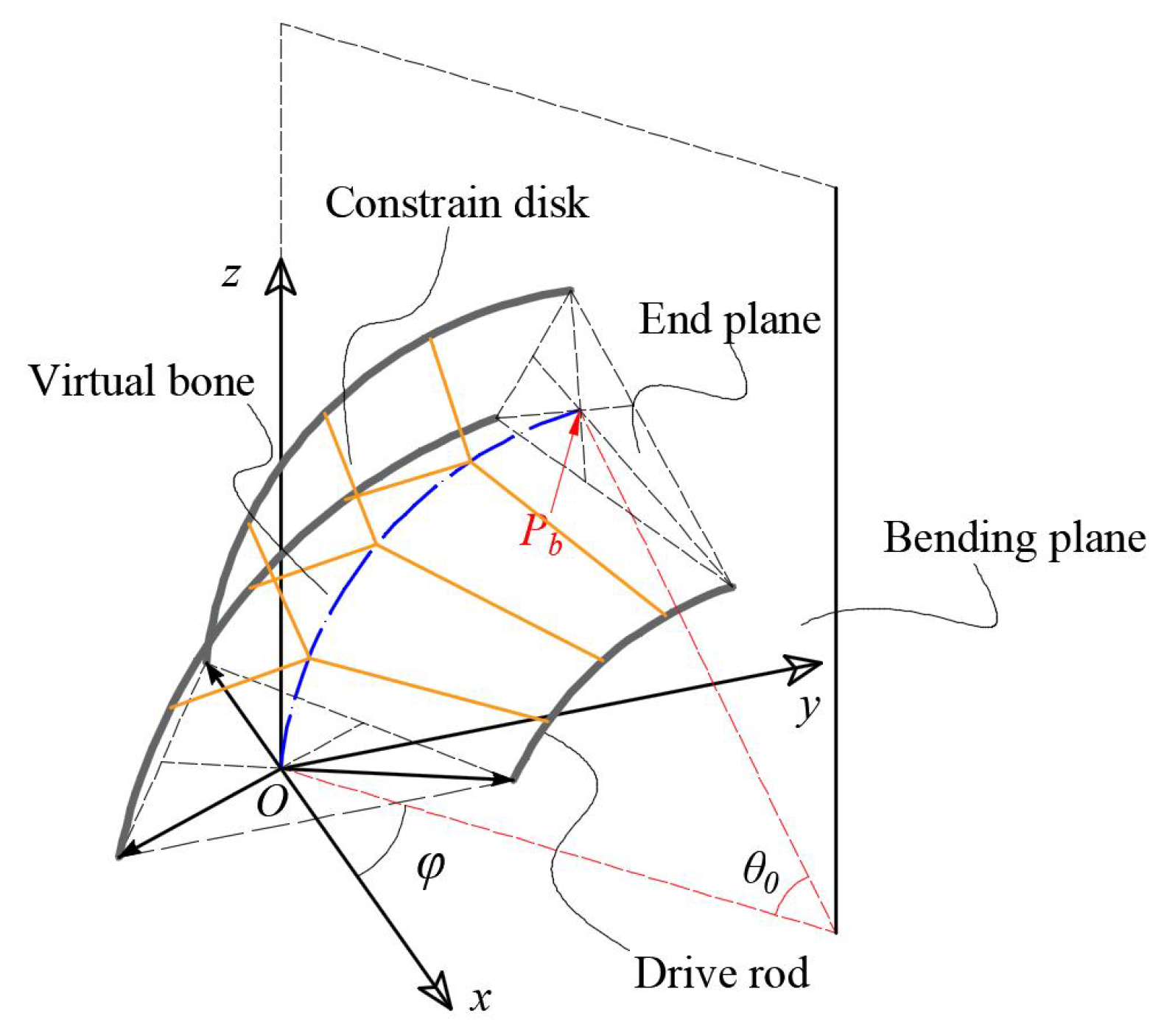
2.2. Kinematics
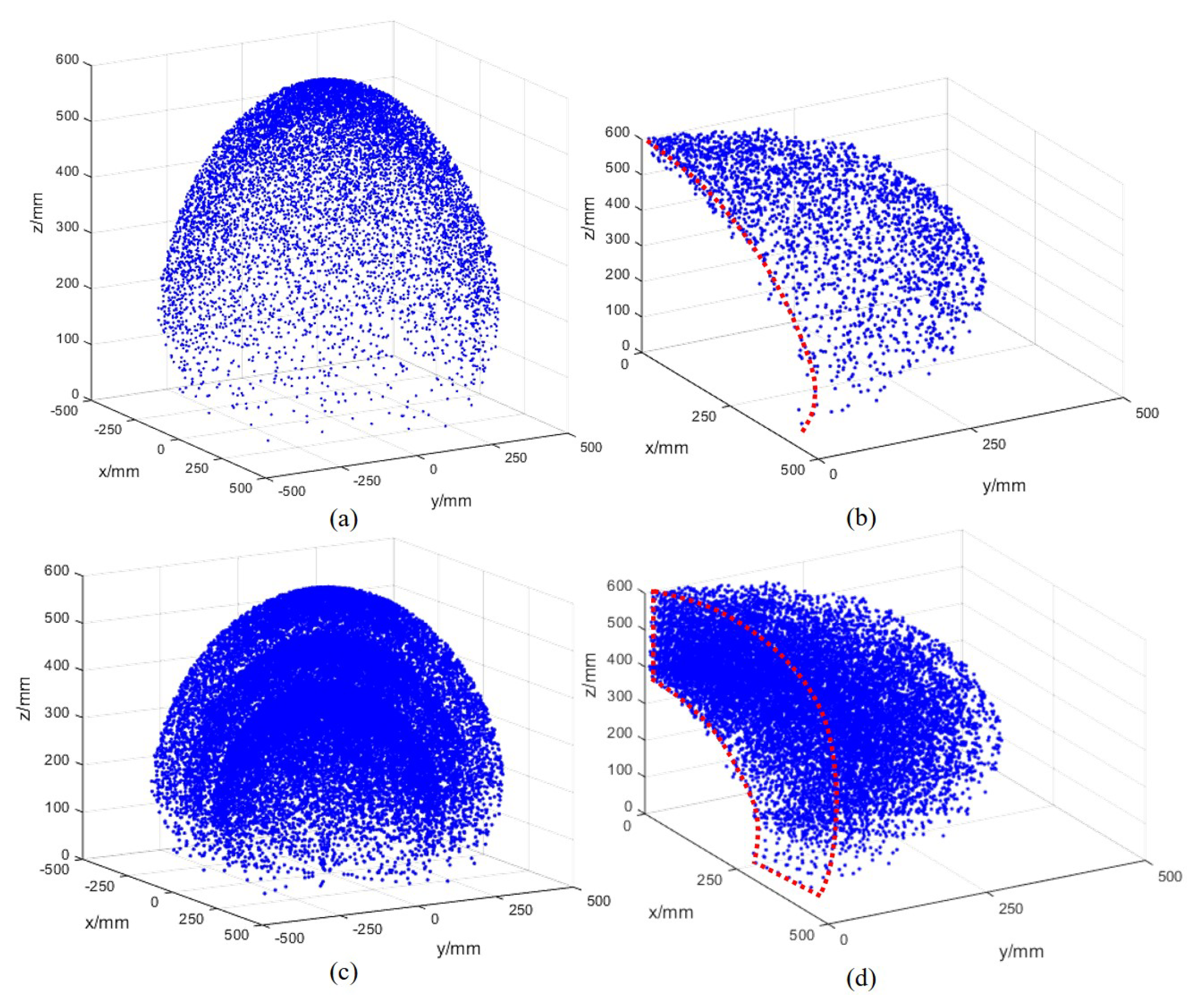
2.3. Workspace
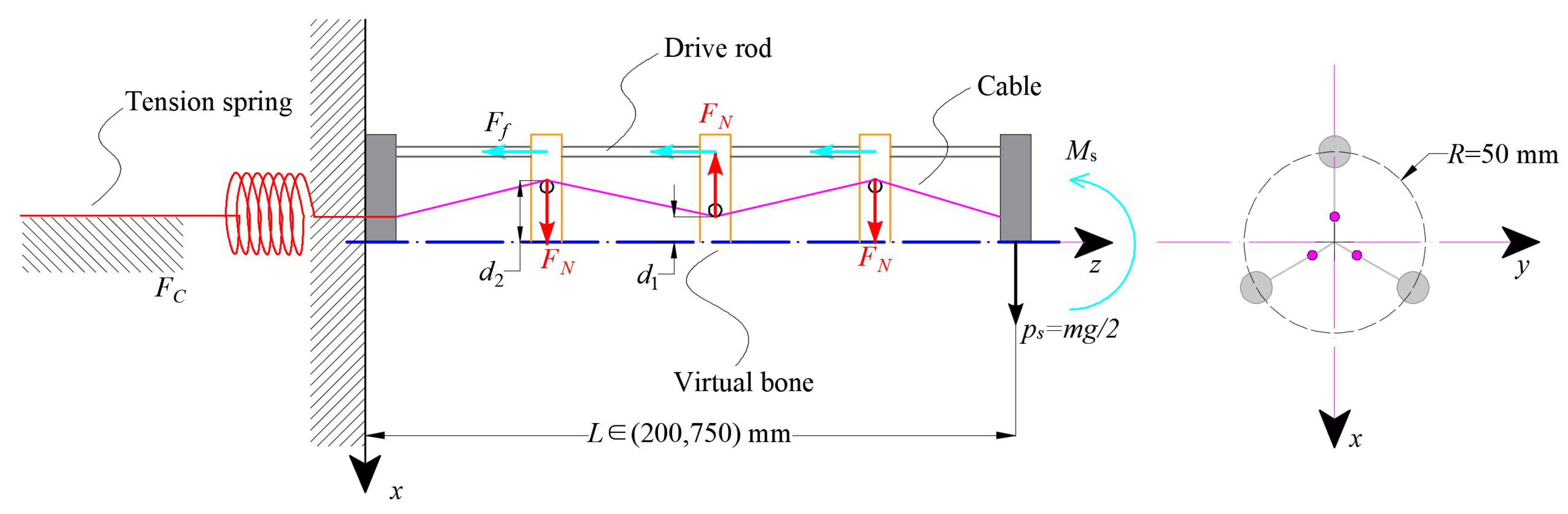
3. Stiffness Adjustment Mechanism (SAM)
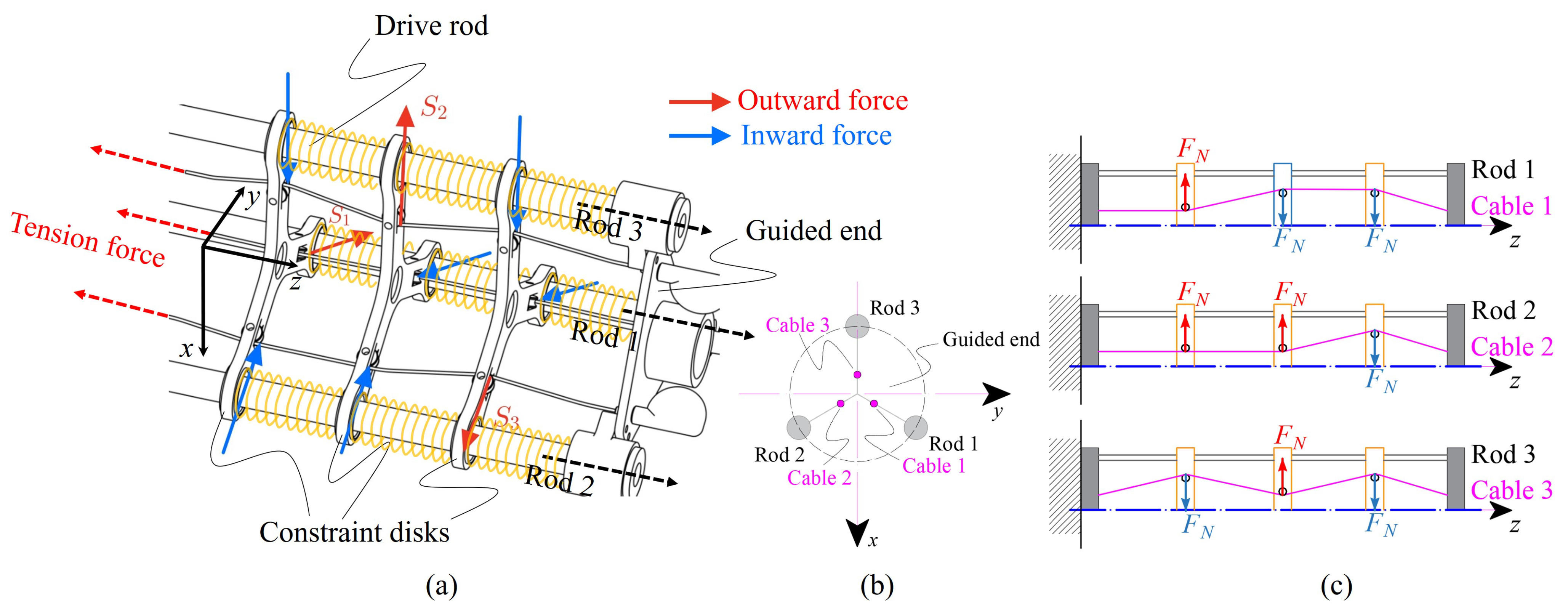
3.1. Working Principle
3.2. Force Transmission
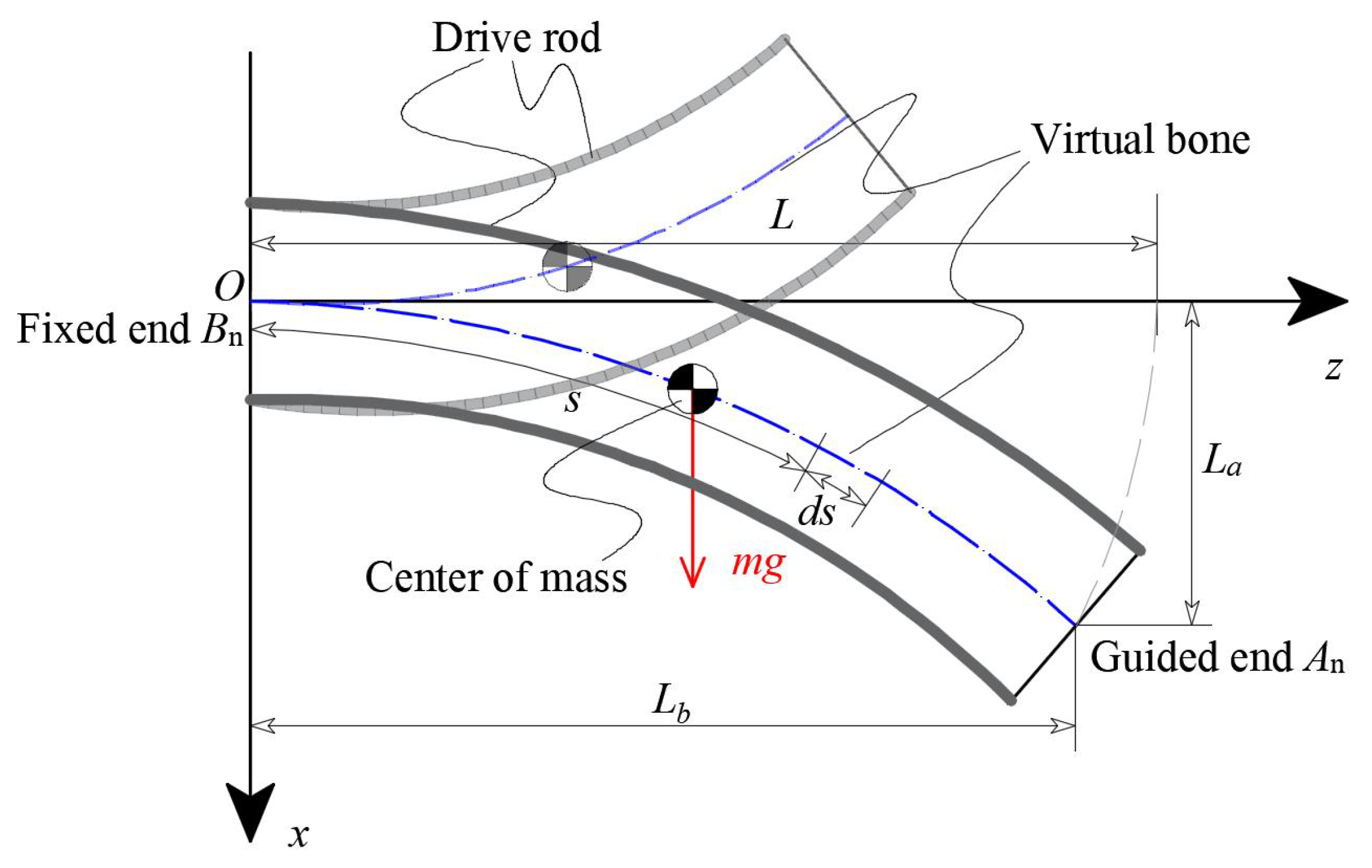
4. Static Modeling and Analysis
- The continuum robot has a slender structure, and the mass distribution is assumed uniform;
- Each curve of the drive rod is parallel to each other, including the virtual bone;
- Due to the compression springs being utilized to keep an equidistant sate of the constraint disks, the elastic potential energy is negligible.
4.1. Elastic Potential Energy and Bending Stiffness
4.2. Static Modeling
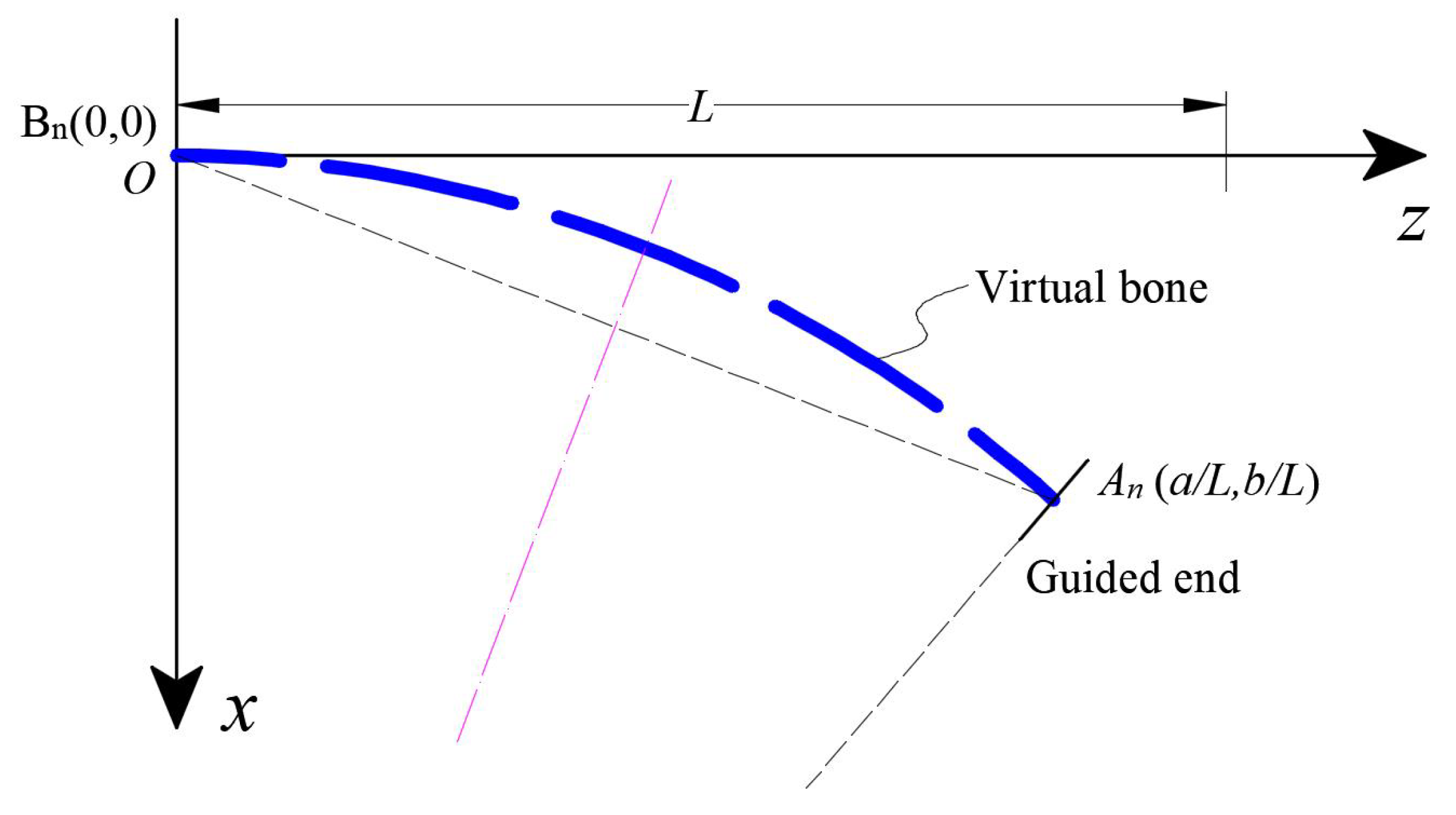
4.3. Predicted Robot Shape
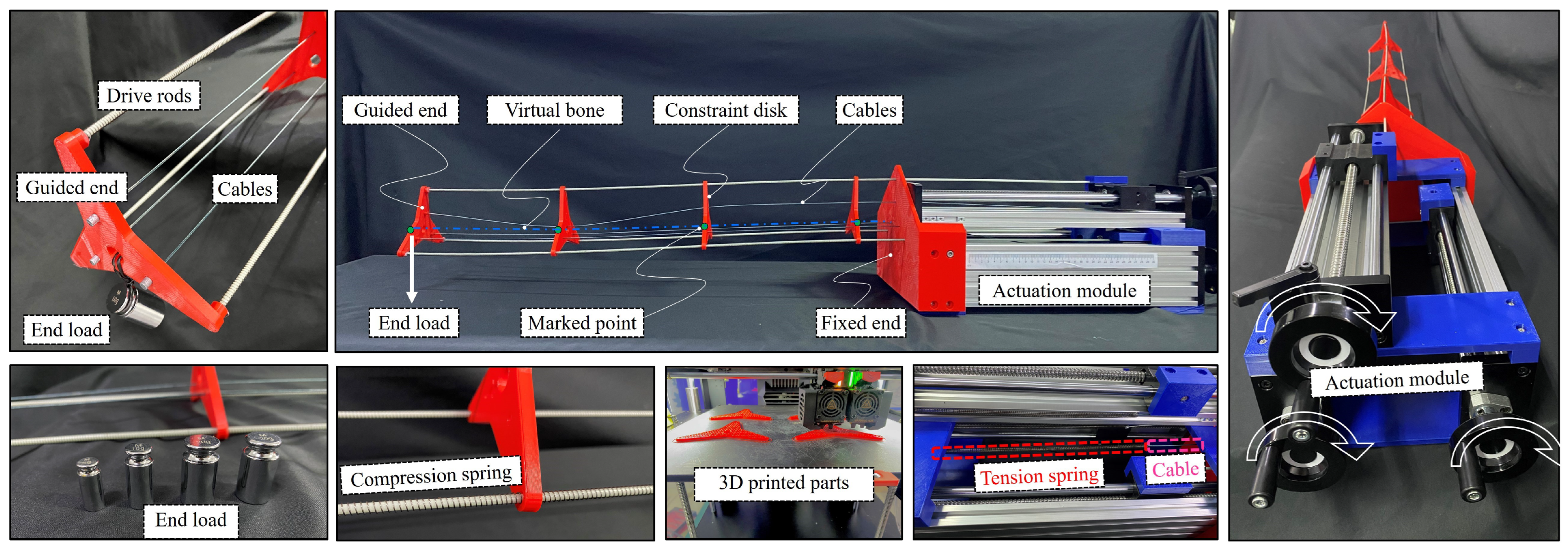
5. Experiments and Results
5.1. Robot Prototype and Test Platform Setup
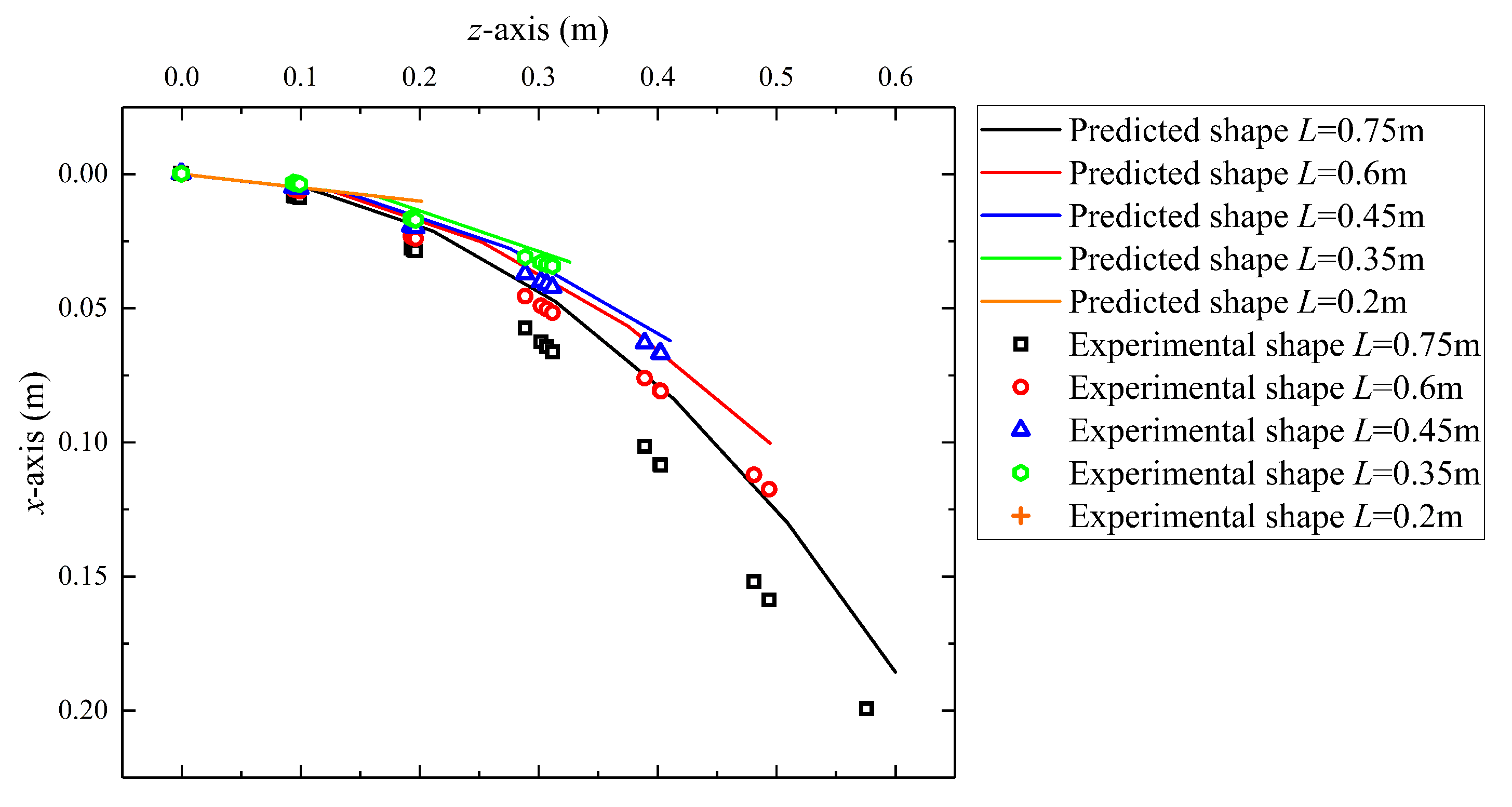
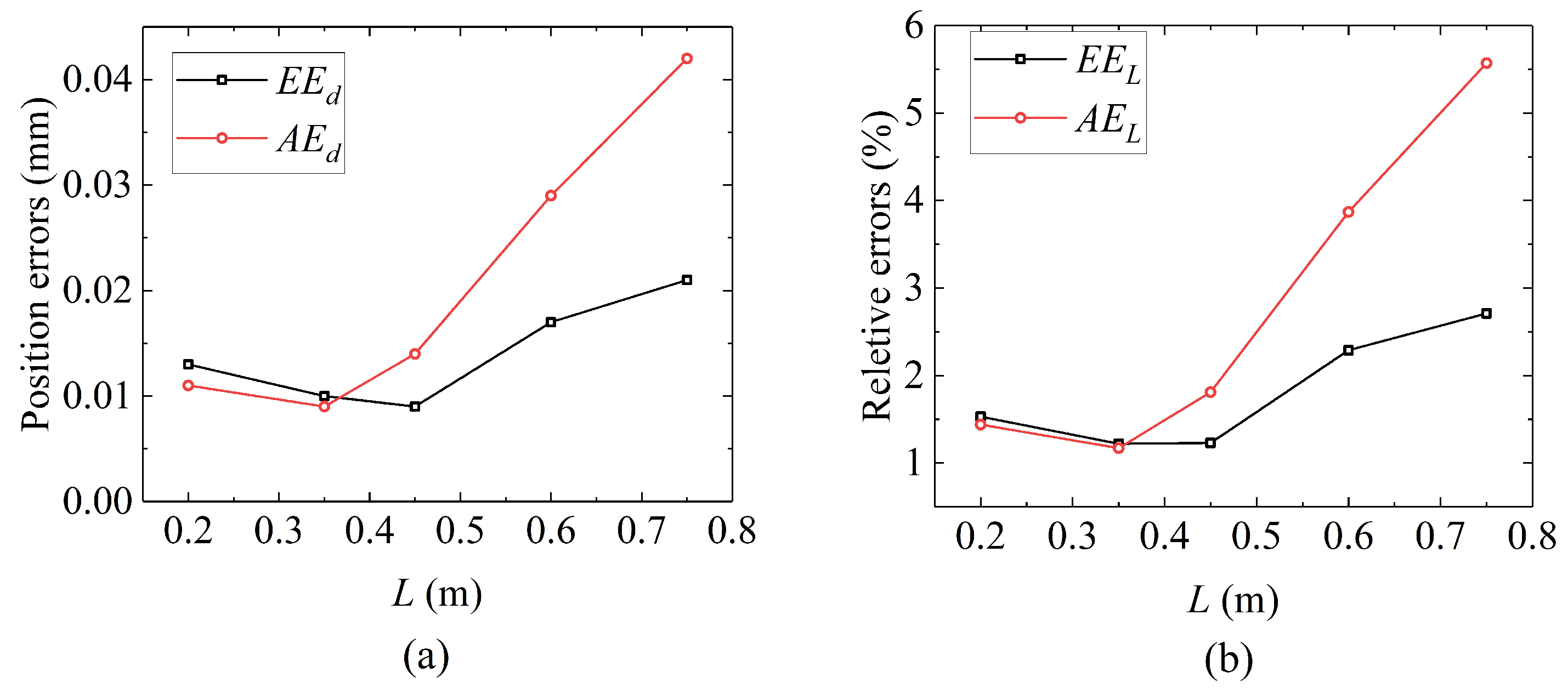
5.2. Predicted Robot Shape in Different Actuation Displacement
- Both absolute and relative errors increase with the elongation of the robot.
- In general, the average error is greater than the robot end error.
- The average error almost shows a linear trend after the robot length is greater than 0.3 m, while the trend of end error change is not as significant as the average error.
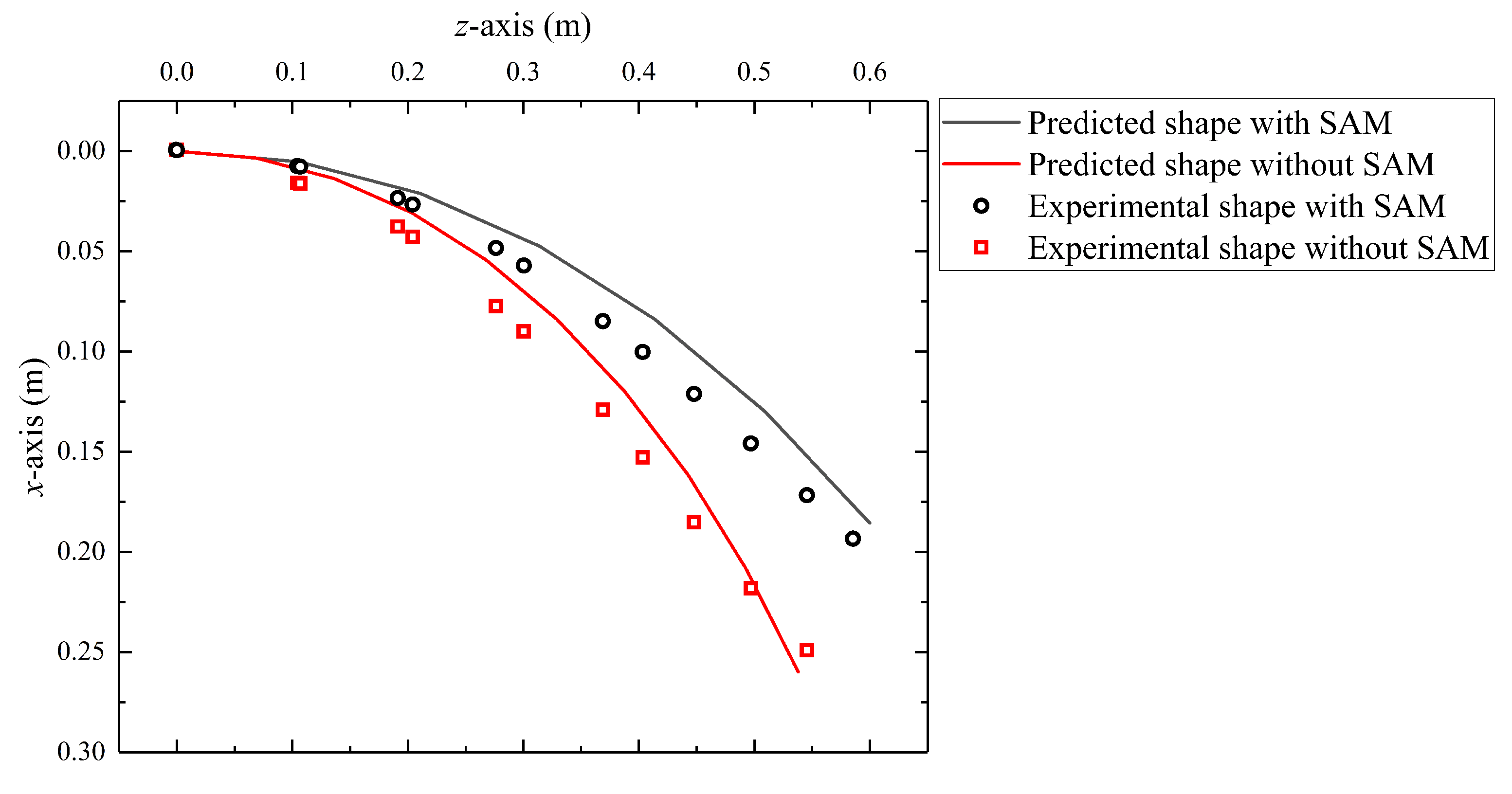
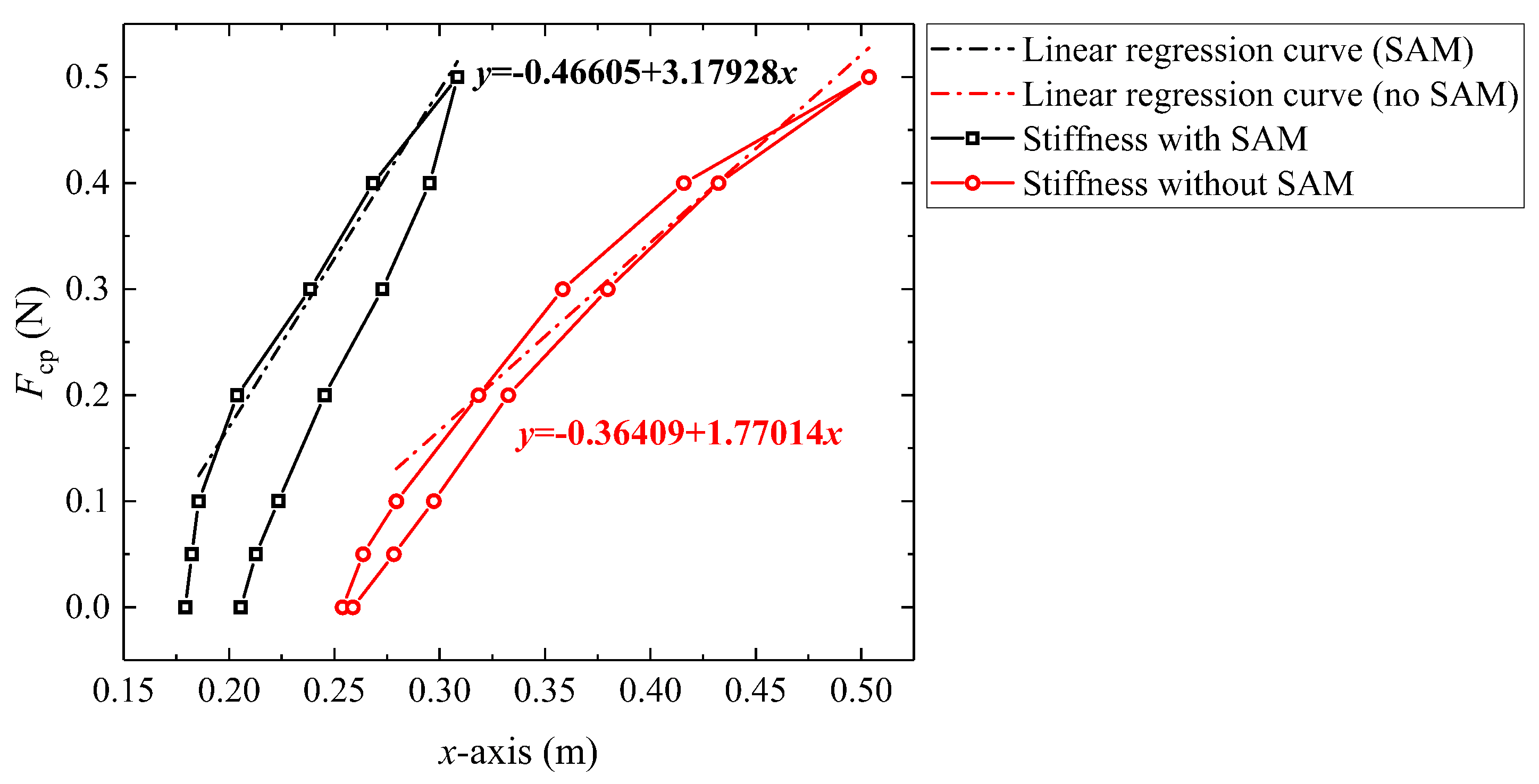
5.3. Effect of Stiffness Adjustment Mechanism
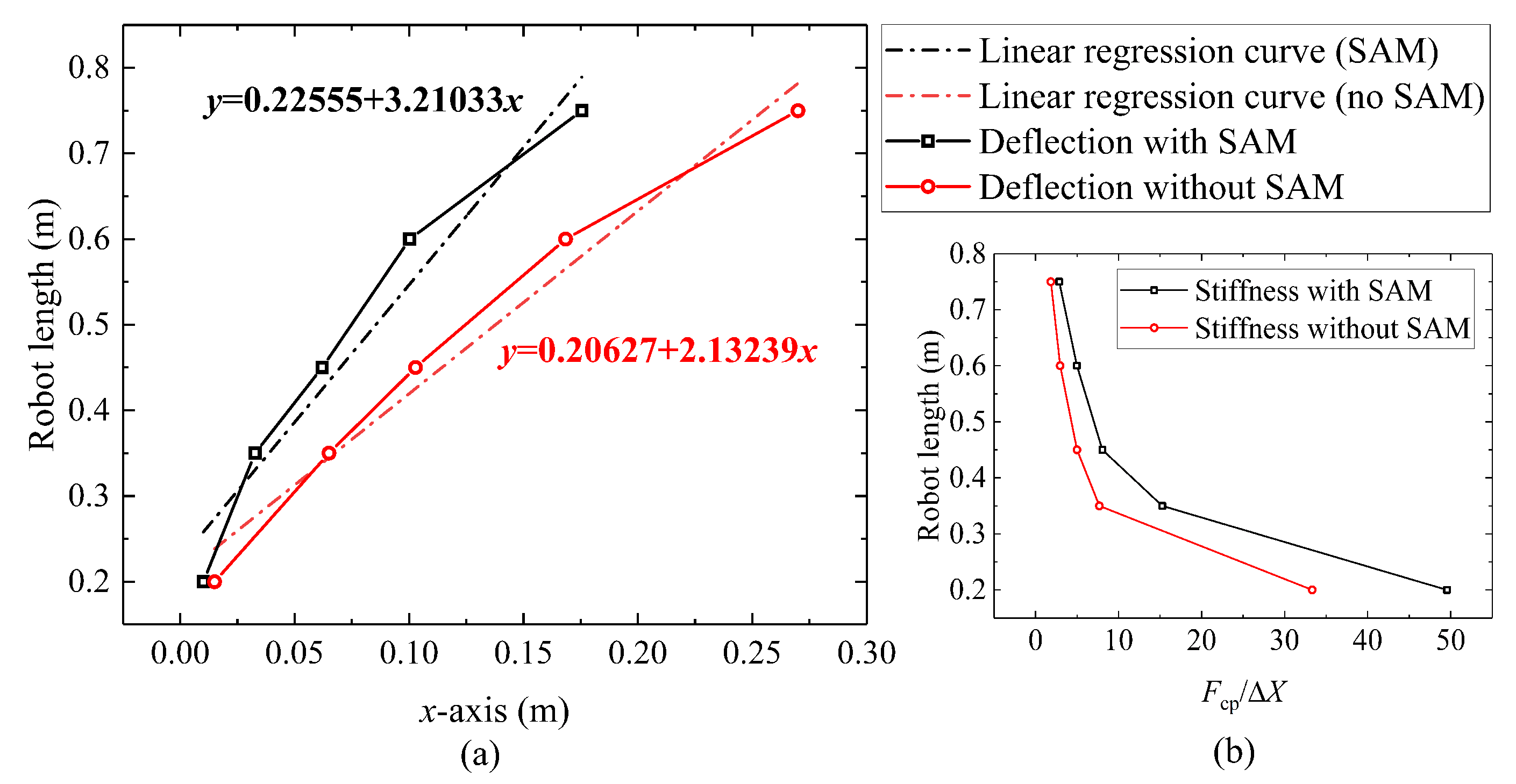
5.4. Effect of Variable Stiffness Demonstration and Validation
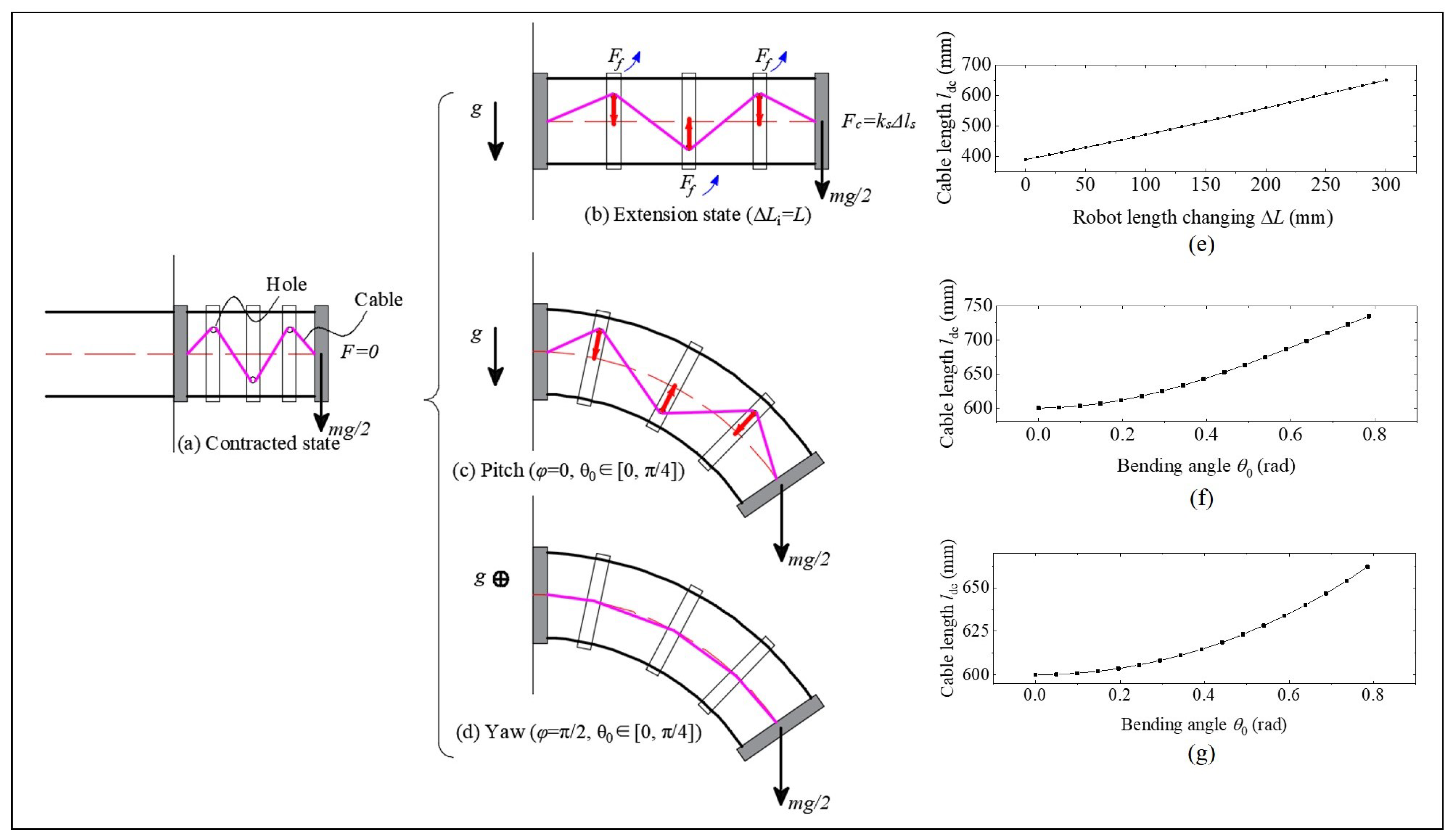
5.5. Effect of Basic Motions on Cable Length Changing
6. Discussion and Conclusions
7. Patents
- Mingyuan Wang et al., A driving component for a continuum robot, Chinese patent, ZL202111404400.5, Shanghai University, 2022. 12. 27. (Granted)
- Mingyuan Wang et al., A Modular Continuum Robot with Multiple Operation Modes, Chinese patent, ZL202111403853.6, Shanghai University, 2023. 8. 11. (Granted)
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CR | Continuum Robot |
| GCCR | Growth-controllable Continuum Robot |
| SAM | Stiffness Adjustment Mechanism |
| SMA | Shape Memory Alloy |
| CM | Center of Mass |
| Bending angle between the end plane and base plane | |
| Rotation angle between and the projection of bending plane on the base plane | |
| L | The length of the robot, i.e., virtual bone’s length |
| The variable length of each drive rod () | |
| The posture parameters of the robot | |
| The guided end position of the robot | |
| r | The distance between the drive rods and the virtual bone |
| The diameter of the drive rods | |
| The normal force between constraint disks and drive rods | |
| The frictional force between constraint disks and drive rods | |
| The tension force provided by the tension springs | |
| The load on the guided end | |
| The distance between the cable and the virtual bone () | |
| Stiffness of the tension spring | |
| Stiffness of the robot | |
| Variable length of each spring | |
| Length of the built in cable | |
| Frictional coefficient of cable and constraint disks | |
| Equivalent compensation torque provided by the frictional force | |
| Elastic potential energy of each fiberglass rod (drive rod) () | |
| Bending stiffness of the fiberglass rod () | |
| Curvature of each point on the fiberglass rod () | |
| Equivalent bending stiffness of the robot | |
| Bending moment acting on the guided end of the robot | |
| Equivalent mass on the guided end of the robot | |
| K | Curvature of the virtual bone |
| The load factor [44] | |
| The equivalent density per unit length of the robot | |
| g | Gravitational acceleration |
| n | Number of the drive rods |
| N | Number of the constraint disks |
| The direction of force on the i-th constraint disk |
References
- Webster, R.J., III; Jones, B.A. Design and kinematic modeling of constant curvature continuum robots: A review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Walker, I.D. Continuous backbone “continuum” robot manipulators. Int. Sch. Res. Not. 2013, 13, 726506. [Google Scholar] [CrossRef]
- Barrientos-Diez, J.; Dong, X.; Axinte, D.; Kell, J. Real-time kinematics of continuum robots: Modeling and validation. Robot. Comput.-Integr. Manuf. 2021, 67, 102019. [Google Scholar] [CrossRef]
- Wang, M.; Palmer, D.; Dong, X.; Alatorre, D.; Axinte, D.; Norton, A. Design and development of a slender dual-structure continuum robot for in-situ aeroengine repair. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 5648–5653. [Google Scholar] [CrossRef]
- Liu, S.; Yang, Z.; Zhu, Z.; Han, L.; Zhu, X.; Xu, K. Development of a dexterous continuum manipulator for exploration and inspection in confined spaces. Ind. Robot. Int. J. 2016, 43, 284–295. [Google Scholar] [CrossRef]
- Tang, L.; Wang, J.; Zheng, Y.; Gu, G.; Zhu, L.; Zhu, X. Design of a cable-driven hyper-redundant robot with experimental validation. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417734458. [Google Scholar] [CrossRef]
- Gilbert, H.B.; Neimat, J.; Webster, R.J. Concentric tube robots as steerable needles: Achieving follow-the-leader deployment. IEEE Trans. Robot. 2015, 31, 246–258. [Google Scholar] [CrossRef] [PubMed]
- Palmer, D.; Axinte, D. Active uncoiling and feeding of a continuum arm robot. Robot. Comput.-Integr. Manuf. 2019, 56, 107–116. [Google Scholar] [CrossRef]
- Zhao, B.; Zeng, L.; Wu, Z.; Xu, K. A continuum manipulator for continuously variable stiffness and its stiffness control formulation. Mech. Mach. Theory 2020, 149, 103746. [Google Scholar] [CrossRef]
- Kanada, A.; Giardina, F.; Howison, T.; Mashimo, T.; Iida, F. Reachability improvement of a climbing robot based on large deformations induced by tri-tube soft actuators. Soft Robot. 2019, 6, 483–494. [Google Scholar] [CrossRef]
- Mahvash, M.; Dupont, P.E. Stiffness control of surgical continuum manipulators. IEEE Trans. Robot. 2011, 27, 334–345. [Google Scholar] [CrossRef]
- Bajo, A.; Simaan, N. Hybrid motion/force control of multi-backbone continuum robots. Int. J. Robot. Res. 2016, 35, 422–434. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef] [PubMed]
- Cianchetti, M.; Ranzani, T.; Gerboni, G.; De Falco, I.; Laschi, C.; Menciassi, A. STIFF-FLOP surgical manipulator: Mechanical design and experimental characterization of the single module. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3576–3581. [Google Scholar] [CrossRef]
- Kim, Y.J.; Cheng, S.; Kim, S.; Iagnemma, K. A novel layer jamming mechanism with tunable stiffness capability for minimally invasive surgery. IEEE Trans. Robot. 2013, 29, 1031–1042. [Google Scholar] [CrossRef]
- Cao, C.; Zhao, X. Tunable stiffness of electrorheological elastomers by designing mesostructures. Appl. Phys. Lett. 2013, 103, 041901. [Google Scholar] [CrossRef]
- Cheng, N.G.; Gopinath, A.; Wang, L.; Iagnemma, K.; Hosoi, A.E. Thermally tunable, self-healing composites for soft robotic applications. Macromol. Mater. Eng. 2014, 299, 1279–1284. [Google Scholar] [CrossRef]
- Suzumori, K.; Wakimoto, S.; Miyoshi, K.; Iwata, K. Long bending rubber mechanism combined contracting and extending tluidic actuators. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4454–4459. [Google Scholar] [CrossRef]
- Russo, M.; Sadati, S.M.H.; Dong, X.; Mohammad, A.; Walker, I.D.; Bergeles, C.; Xu, K.; Axinte, D.A. Continuum robots: An overview. Adv. Intell. Syst. 2023, 5, 2200367. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Chen, Y. Principles and methods for stiffness modulation in soft robot design and development. Bio-Des. Manuf. 2018, 1, 14–25. [Google Scholar] [CrossRef]
- Mattar, E. A survey of bio-inspired robotics hands implementation: New directions in dexterous manipulation. Robot. Auton. Syst. 2013, 61, 517–544. [Google Scholar] [CrossRef]
- Li, S.; Wang, K. Plant-inspired adaptive structures and materials for morphing and actuation: A review. Bioinspir. Biomimetics 2016, 12, 011001. [Google Scholar] [CrossRef]
- Manti, M.; Cacucciolo, V.; Cianchetti, M. Stiffening in Soft Robotics: A Review of the State of the Art. IEEE Robot. Autom. Mag. 2016, 23, 93–106. [Google Scholar] [CrossRef]
- Saavedra Flores, E.I.; Friswell, M.I.; Xia, Y. Variable stiffness biological and bio-inspired materials. J. Intell. Mater. Syst. Struct. 2013, 24, 529–540. [Google Scholar] [CrossRef]
- Calderón, A.A.; Ugalde, J.C.; Chang, L.; Zagal, J.C.; Pérez-Arancibia, N.O. An earthworm-inspired soft robot with perceptive artificial skin. Bioinspir. Biomimetics 2019, 14, 056012. [Google Scholar] [CrossRef] [PubMed]
- Young, M. The molecular basis of muscle contraction. Annu. Rev. Biochem. 1969, 38, 913–950. [Google Scholar] [CrossRef] [PubMed]
- Xiong, Q.; Ang, B.W.; Jin, T.; Ambrose, J.W.; Yeow, R.C. Earthworm-Inspired Multi-Material, Adaptive Strain-Limiting, Hybrid Actuators for Soft Robots. Adv. Intell. Syst. 2023, 5, 2200346. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Blumenschein, L.H.; Greer, J.D.; Okamura, A.M. A soft robot that navigates its environment through growth. Sci. Robot. 2017, 2, eaan3028. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Geng, S.; Walker, I.; Branson, D.T.; Liu, J.; Dai, J.S.; Kang, R. Geometric constraint-based modeling and analysis of a novel continuum robot with Shape Memory Alloy initiated variable stiffness. Int. J. Robot. Res. 2020, 39, 1620–1634. [Google Scholar] [CrossRef]
- Wang, P.; Guo, S.; Wang, X.; Wu, Y. Design and analysis of a novel variable stiffness continuum robot with built-in winding-styled ropes. IEEE Robot. Autom. Lett. 2022, 7, 6375–6382. [Google Scholar] [CrossRef]
- Kang, B.; Kojcev, R.; Sinibaldi, E. The first interlaced continuum robot, devised to intrinsically follow the leader. PLoS ONE 2016, 11, e0150278. [Google Scholar] [CrossRef]
- Li, D.C.F.; Wang, Z.; Ouyang, B.; Liu, Y.H. A reconfigurable variable stiffness manipulator by a sliding layer mechanism. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3976–3982. [Google Scholar] [CrossRef]
- Wei, Y.; Chen, Y.; Yang, Y.; Li, Y. A soft robotic spine with tunable stiffness based on integrated ball joint and particle jamming. Mechatronics 2016, 33, 84–92. [Google Scholar] [CrossRef]
- Kim, Y.J.; Cheng, S.; Kim, S.; Iagnemma, K. A stiffness-adjustable hyperredundant manipulator using a variable neutral-line mechanism for minimally invasive surgery. IEEE Trans. Robot. 2014, 30, 382–395. [Google Scholar] [CrossRef]
- Gao, G.; Wang, H.; Fan, J.; Xia, Q.; Li, L.; Ren, H. Study on stretch-retractable single-section continuum manipulator. Adv. Robot. 2019, 33, 1–12. [Google Scholar] [CrossRef]
- Amanov, E.; Nguyen, T.D.; Burgner-Kahrs, J. Tendon-driven continuum robots with extensible sections—A model-based evaluation of path-following motions. Int. J. Robot. Res. 2021, 40, 7–23. [Google Scholar] [CrossRef]
- Kroese, D.P.; Rubinstein, R.Y. Monte carlo methods. WIREs Comput. Stat. 2012, 4, 48–58. [Google Scholar] [CrossRef]
- Althoefer, K. Antagonistic actuation and stiffness control in soft inflatable robots. Nat. Rev. Mater. 2018, 3, 76–77. [Google Scholar] [CrossRef]
- Zhong, Y.; Hu, L.; Xu, Y. Recent advances in design and actuation of continuum robots for medical applications. Actuators 2020, 9, 142. [Google Scholar] [CrossRef]
- Oliver-Butler, K.; Till, J.; Rucker, C. Continuum robot stiffness under external loads and prescribed tendon displacements. IEEE Trans. Robot. 2019, 35, 403–419. [Google Scholar] [CrossRef]
- Puig-Diví, A.; Escalona-Marfil, C.; Padullés-Riu, J.M.; Busquets, A.; Padullés-Chando, X.; Marcos-Ruiz, D. Validity and reliability of the Kinovea program in obtaining angles and distances using coordinates in 4 perspectives. PLoS ONE 2019, 14, e0216448. [Google Scholar] [CrossRef] [PubMed]
- Russo, M.; Sriratanasak, N.; Ba, W.; Dong, X.; Mohammad, A.; Axinte, D. Cooperative Continuum Robots: Enhancing Individual Continuum Arms by Reconfiguring Into a Parallel Manipulator. IEEE Robot. Autom. Lett. 2022, 7, 1558–1565. [Google Scholar] [CrossRef]
- Sadati, S.H.; Naghibi, S.E.; Shiva, A.; Walker, I.D.; Althoefer, K.; Nanayakkara, T. Mechanics of continuum manipulators, a comparative study of five methods with experiments. In Proceedings of the Towards Autonomous Robotic Systems: 18th Annual Conference (TAROS), Guildford, UK, 19–21 July 2017; Springer: Berlin/Heidelberg, Germany, 2017; pp. 686–702. [Google Scholar] [CrossRef]
- Holst, G.L.; Teichert, G.H.; Jensen, B.D. Modeling and Experiments of Buckling Modes and Deflection of Fixed-Guided Beams in Compliant Mechanisms. J. Mech. Des. 2011, 133, 051002. [Google Scholar] [CrossRef]
- Kiakojouri, F.; De Biagi, V.; Abbracciavento, L. Design for Robustness: Bio-Inspired Perspectives in Structural Engineering. Biomimetics 2023, 8, 95. [Google Scholar] [CrossRef]














| Variable | Value | Unit | Description |
|---|---|---|---|
| n | 3 | — | The number of drive rods |
| 0.2 | m | The initial length of the GCCR (minimum length of the robot) | |
| L | 0.2∼0.75 | m | The length range of the GCCR in this paper |
| 7.5 × 10 | Pa | Young’s modulus of fiberglass | |
| 2.029 × 10 | kgm | The moment of inertia of an area of fiberglass | |
| 0.17 | kg/m | The equivalent density of the GCCR | |
| r | 0.05 | m | The distance between the fiberglass rods and the virtual bone |
| 0.0015 | m | Diameter of each fiberglass rod | |
| g | 9.81 | m/s | Gravitational acceleration |
| 43.8 | N/m | The stiffness of the tension spring | |
| 0.128 | — | Frictional coefficient of cable and constraint disks |
| Length (m) | State | (m) | (%) | (m) | (%) |
|---|---|---|---|---|---|
| 0.20 | With SAM * | 0.013 | 1.44 | 0.011 | 1.53 |
| 0.35 | 0.010 | 1.17 | 0.009 | 1.22 | |
| 0.45 | 0.009 | 1.23 | 0.014 | 1.81 | |
| 0.60 | 0.017 | 2.29 | 0.029 | 3.87 | |
| 0.75 | 0.021 | 2.71 | 0.042 | 5.57 |
| Length (m) | State | (m) | (%) | (m) | (%) | (m) [ (%)] | (m) [ (%)] |
|---|---|---|---|---|---|---|---|
| 0.75 | With SAM * | 0.021 | 2.71 | 0.042 | 5.56 | 0.097 [12.91] | 0.069 [9.27] |
| No SAM | 0.023 | 3.03 | 0.051 | 6.82 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Yuan, J.; Bao, S.; Du, L.; Ma, S. Research on Self-Stiffness Adjustment of Growth-Controllable Continuum Robot (GCCR) Based on Elastic Force Transmission. Biomimetics 2023, 8, 433. https://doi.org/10.3390/biomimetics8050433
Wang M, Yuan J, Bao S, Du L, Ma S. Research on Self-Stiffness Adjustment of Growth-Controllable Continuum Robot (GCCR) Based on Elastic Force Transmission. Biomimetics. 2023; 8(5):433. https://doi.org/10.3390/biomimetics8050433
Chicago/Turabian StyleWang, Mingyuan, Jianjun Yuan, Sheng Bao, Liang Du, and Shugen Ma. 2023. "Research on Self-Stiffness Adjustment of Growth-Controllable Continuum Robot (GCCR) Based on Elastic Force Transmission" Biomimetics 8, no. 5: 433. https://doi.org/10.3390/biomimetics8050433
APA StyleWang, M., Yuan, J., Bao, S., Du, L., & Ma, S. (2023). Research on Self-Stiffness Adjustment of Growth-Controllable Continuum Robot (GCCR) Based on Elastic Force Transmission. Biomimetics, 8(5), 433. https://doi.org/10.3390/biomimetics8050433