


Fault Diagnosis of Planetary Gearbox Based on Dynamic Simulation and Partial Transfer Learning


Abstract
:1. Introduction
- Through the rigid-flexible coupling dynamic model of PG, a wealth of fault simulation data is obtained, and then the problem of scarcity of labeled fault data in real-world scenarios is solved.
- By introducing multiple domain discriminators and a weighted learning scheme, the interference from simulation data of irrelevant categories is filtered, thereby improving the diagnostic accuracy of partial transfer tasks.
2. Theoretical Background
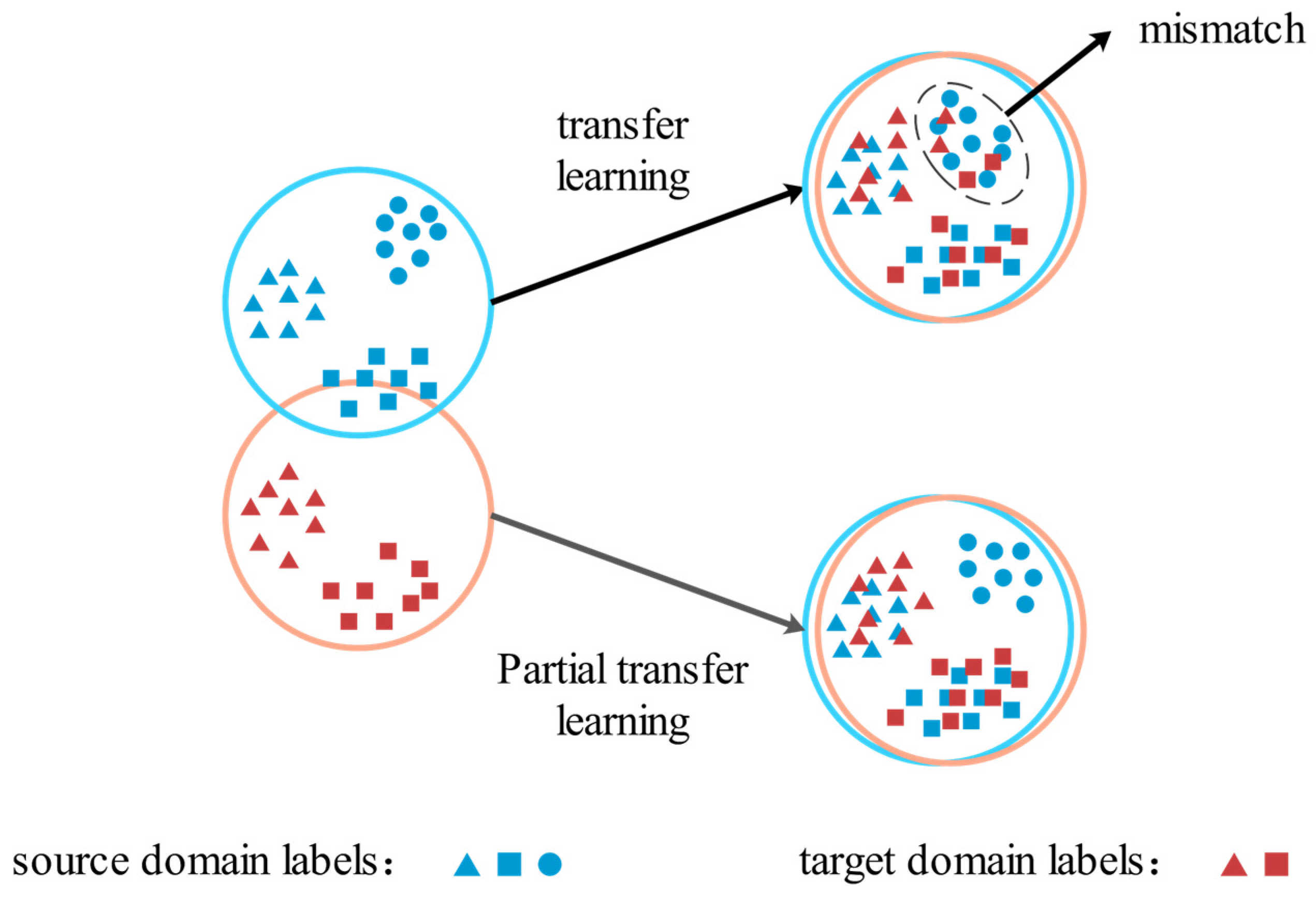
2.1. Partial Transfer Learning
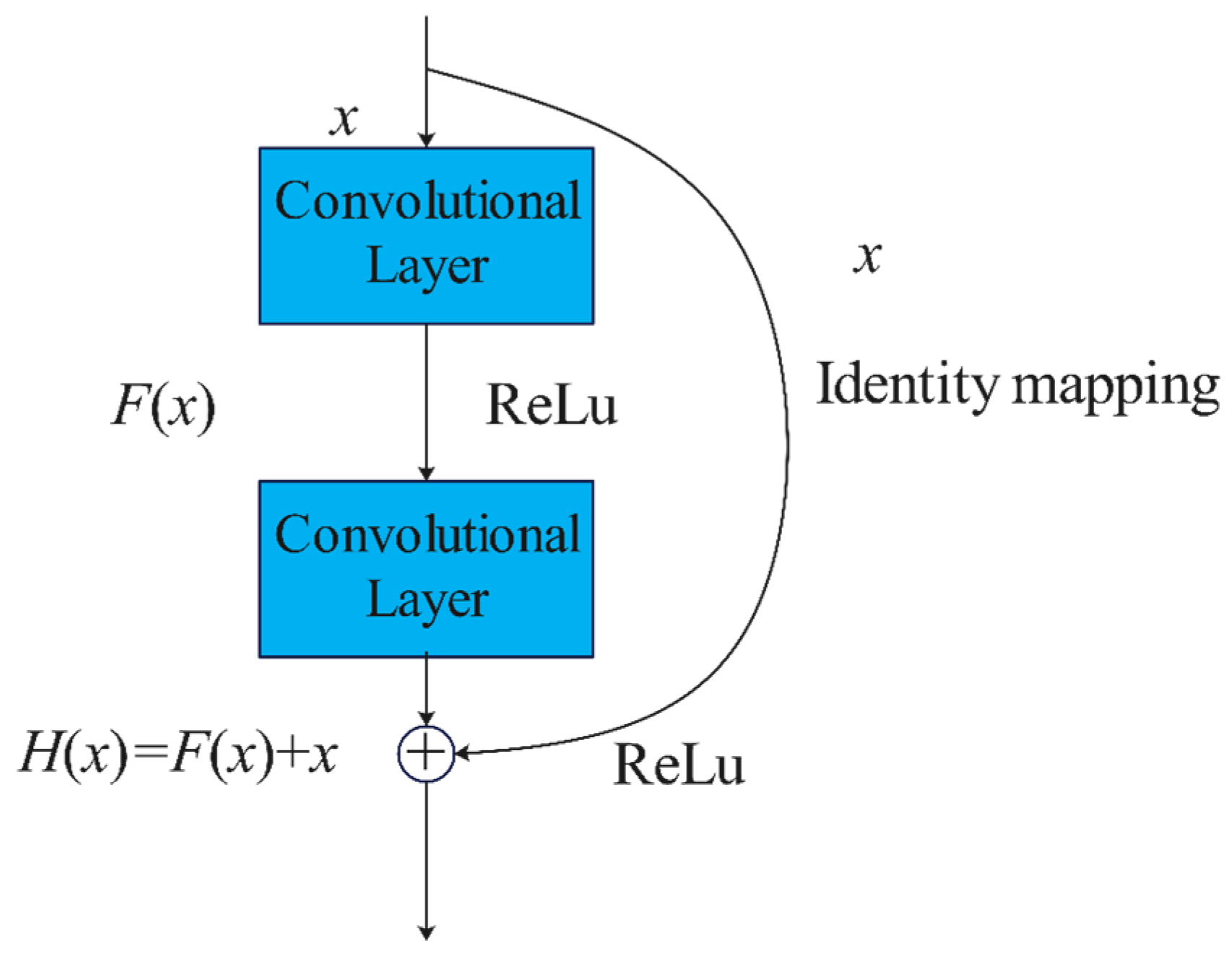
2.2. Residual Neural Network
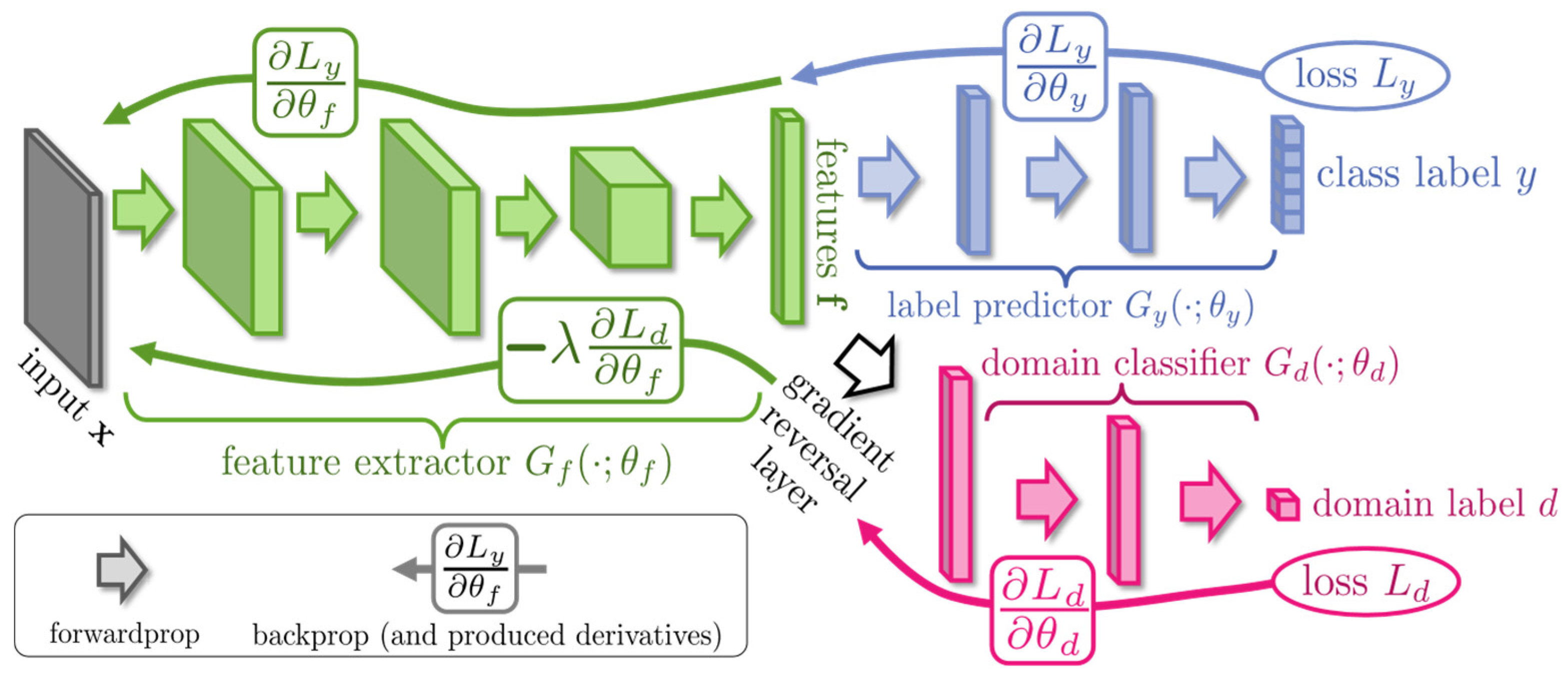
2.3. Domain Adversarial Neural Network
3. Proposed Method
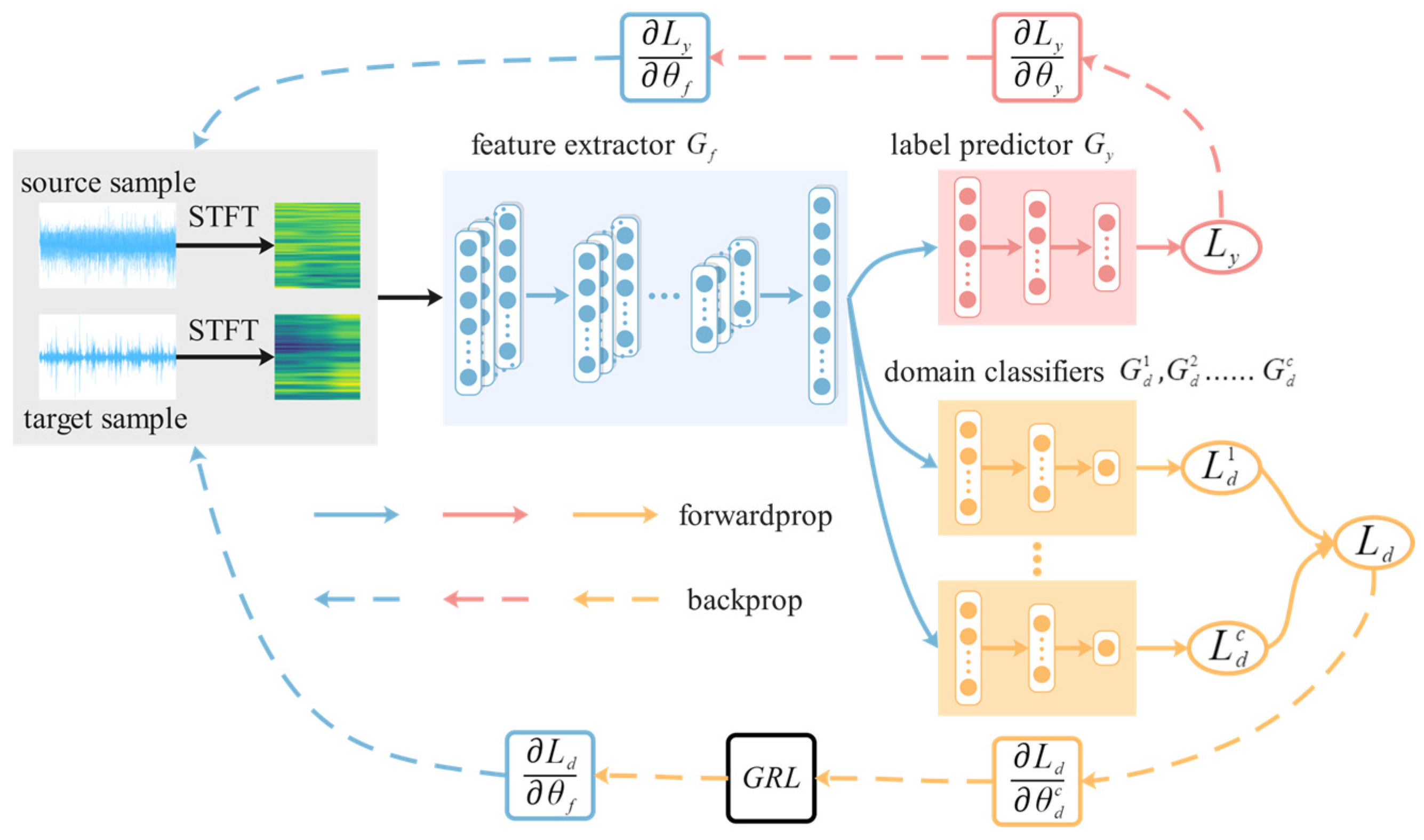
Weighted Domain Adversarial Neural Network Diagnostic Model
4. Experiment and Analysis
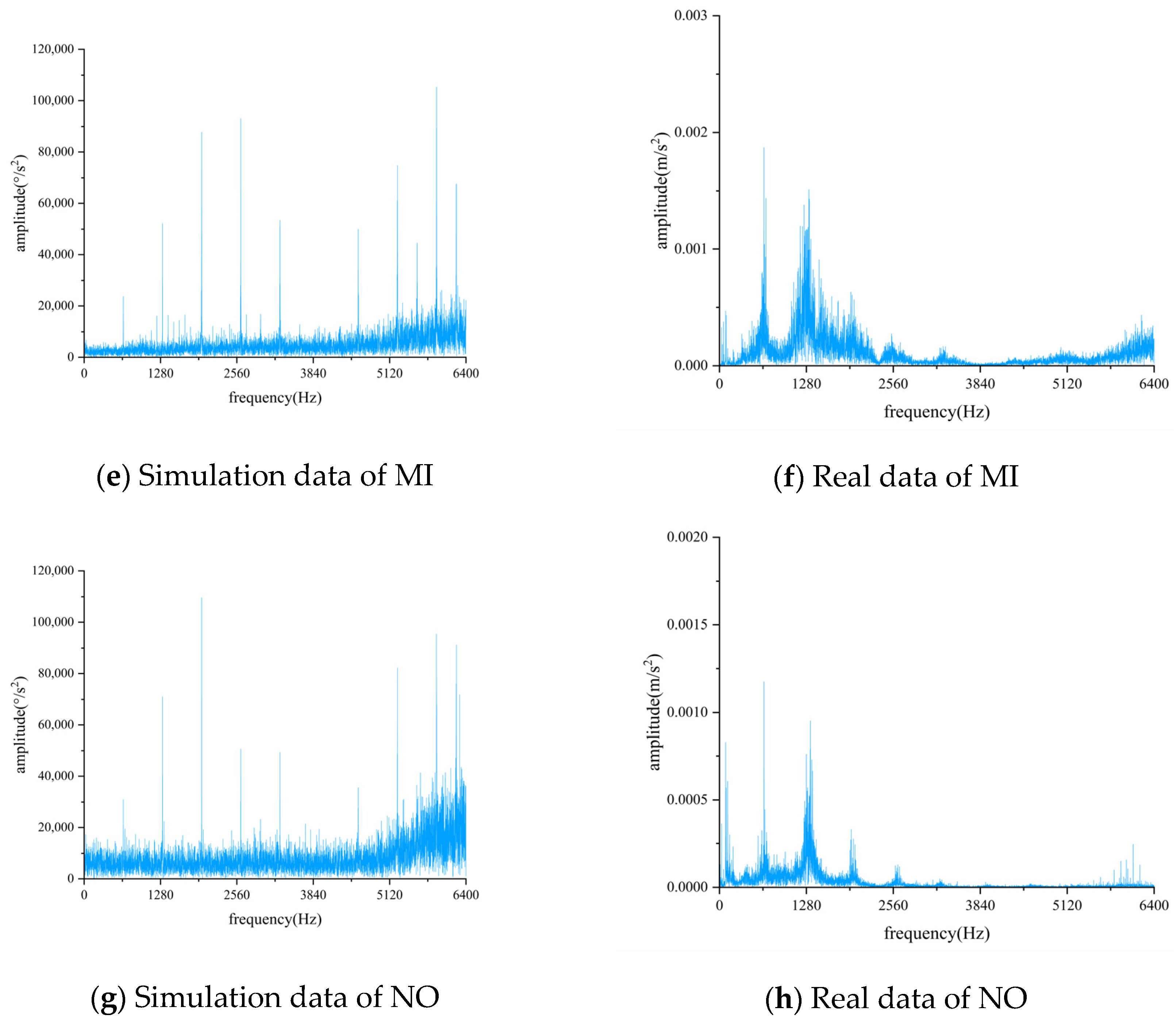
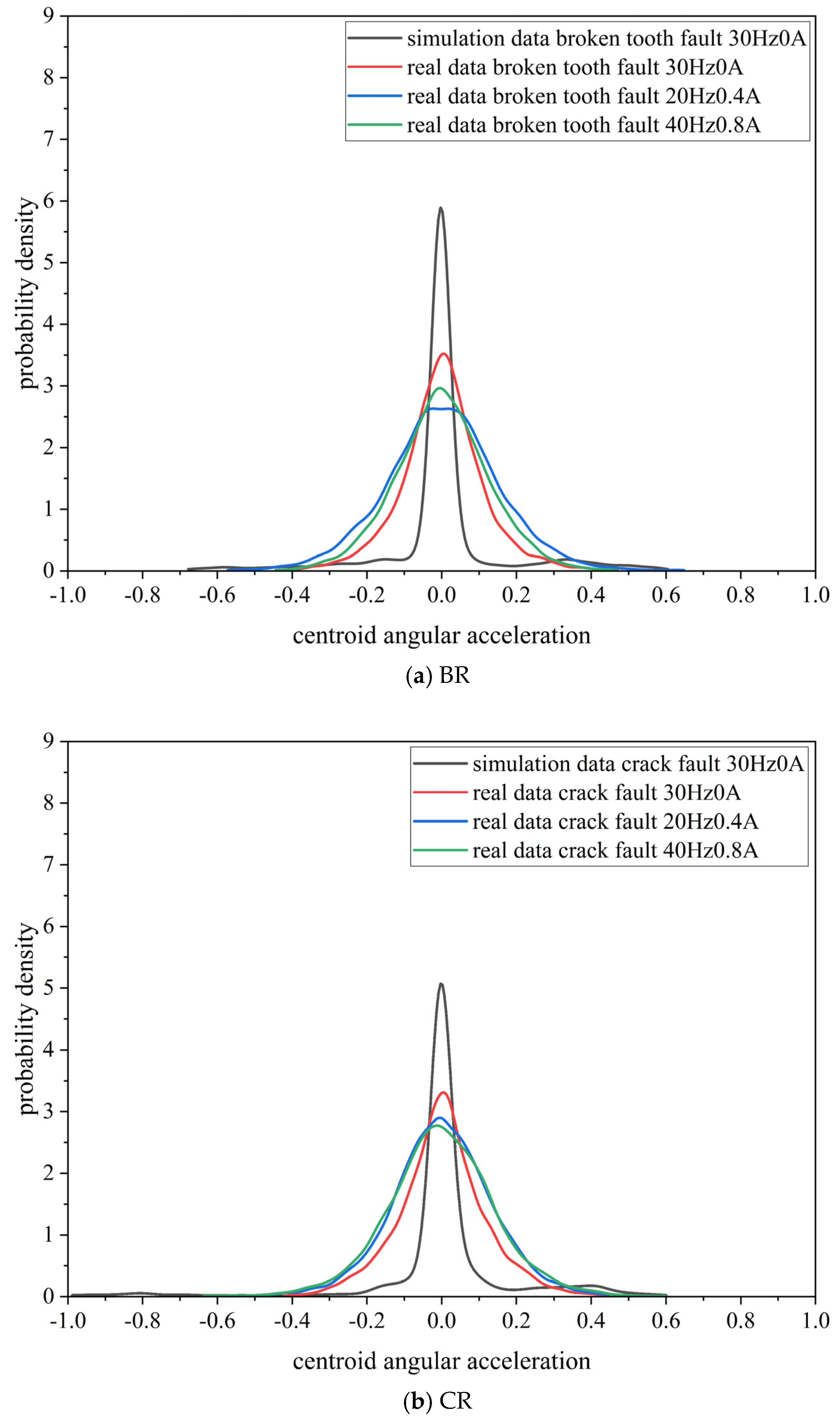
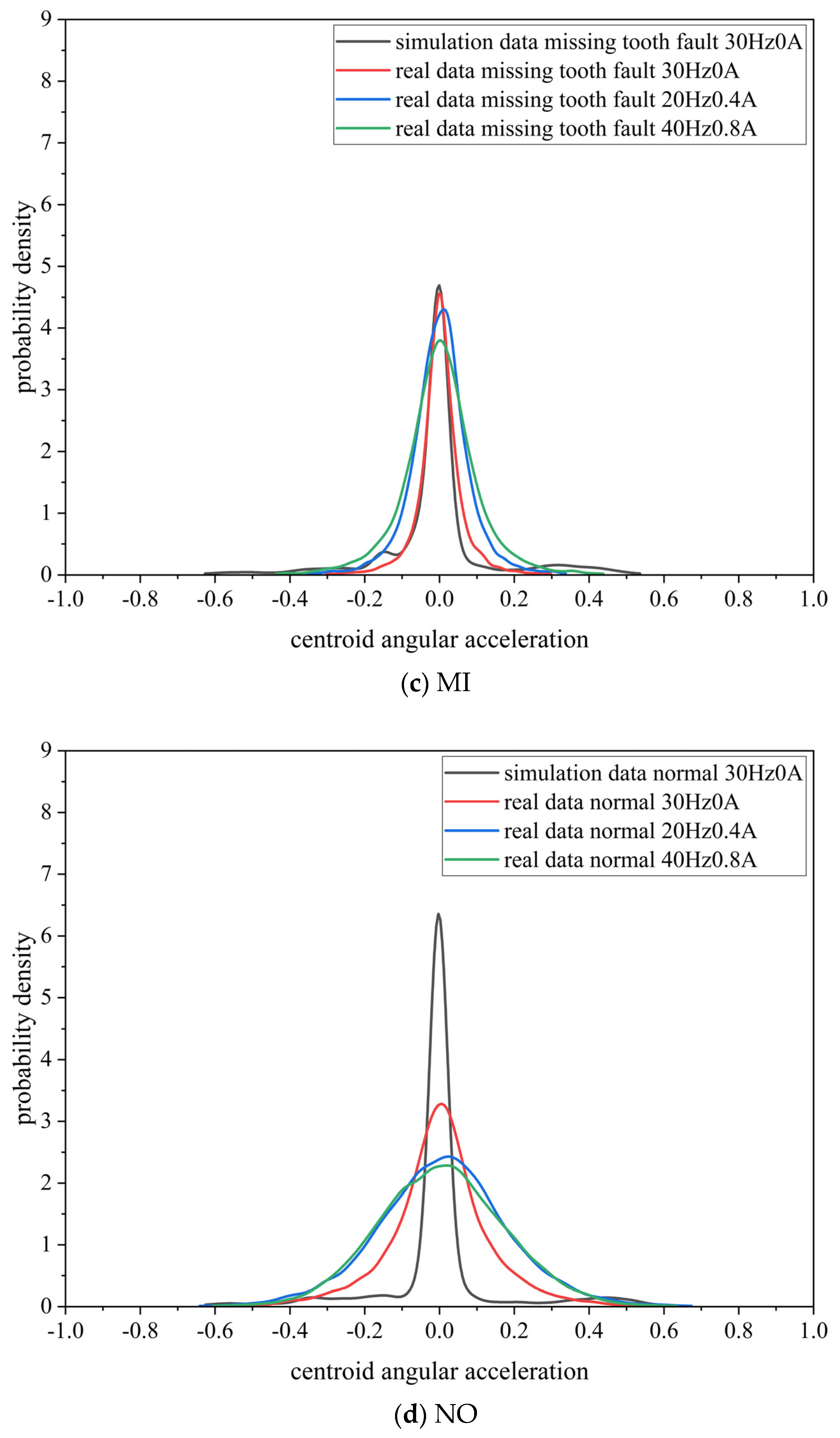
4.1. Dataset Comparison and Analysis
4.2. Dataset Description
4.3. Result Comparison
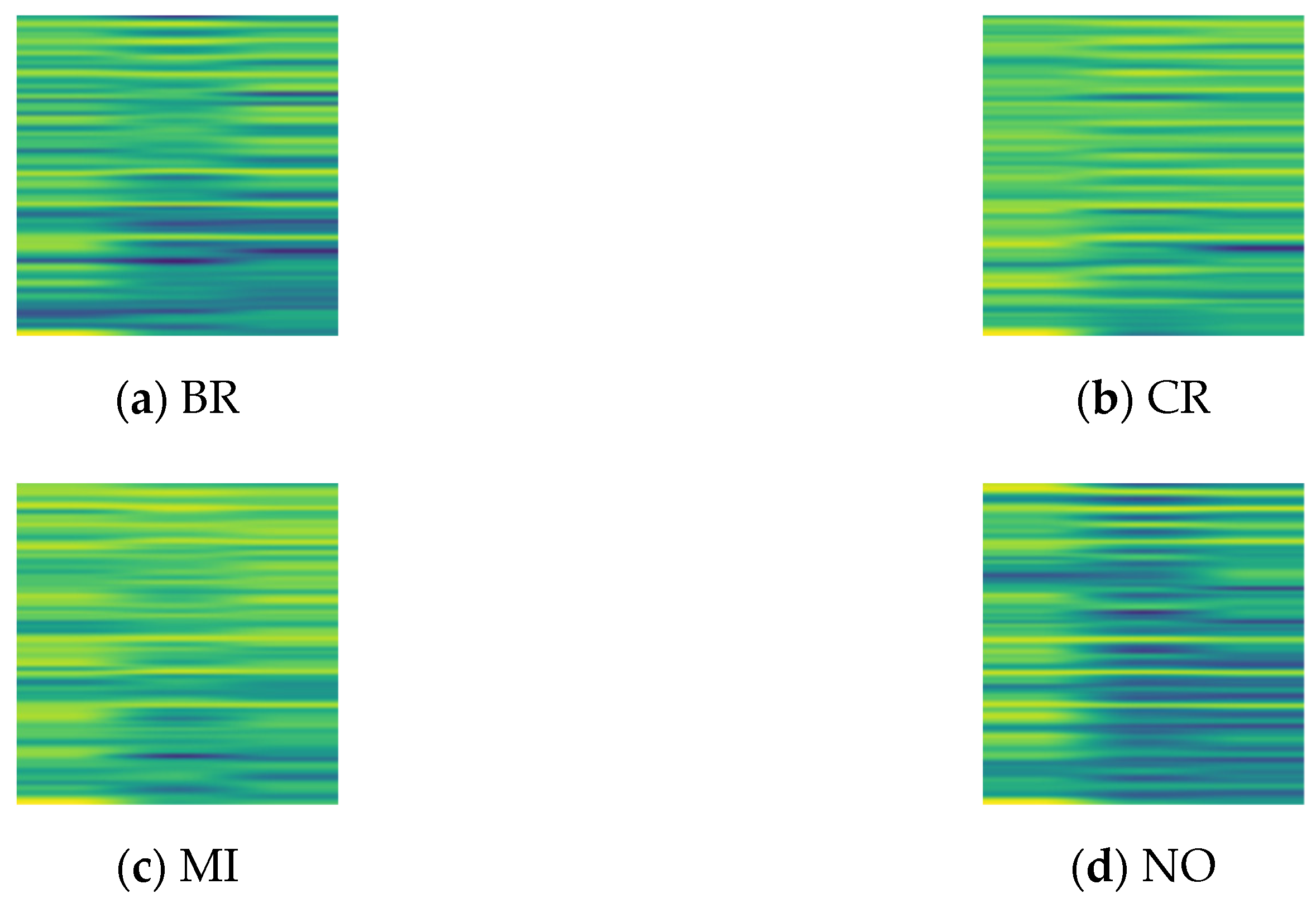
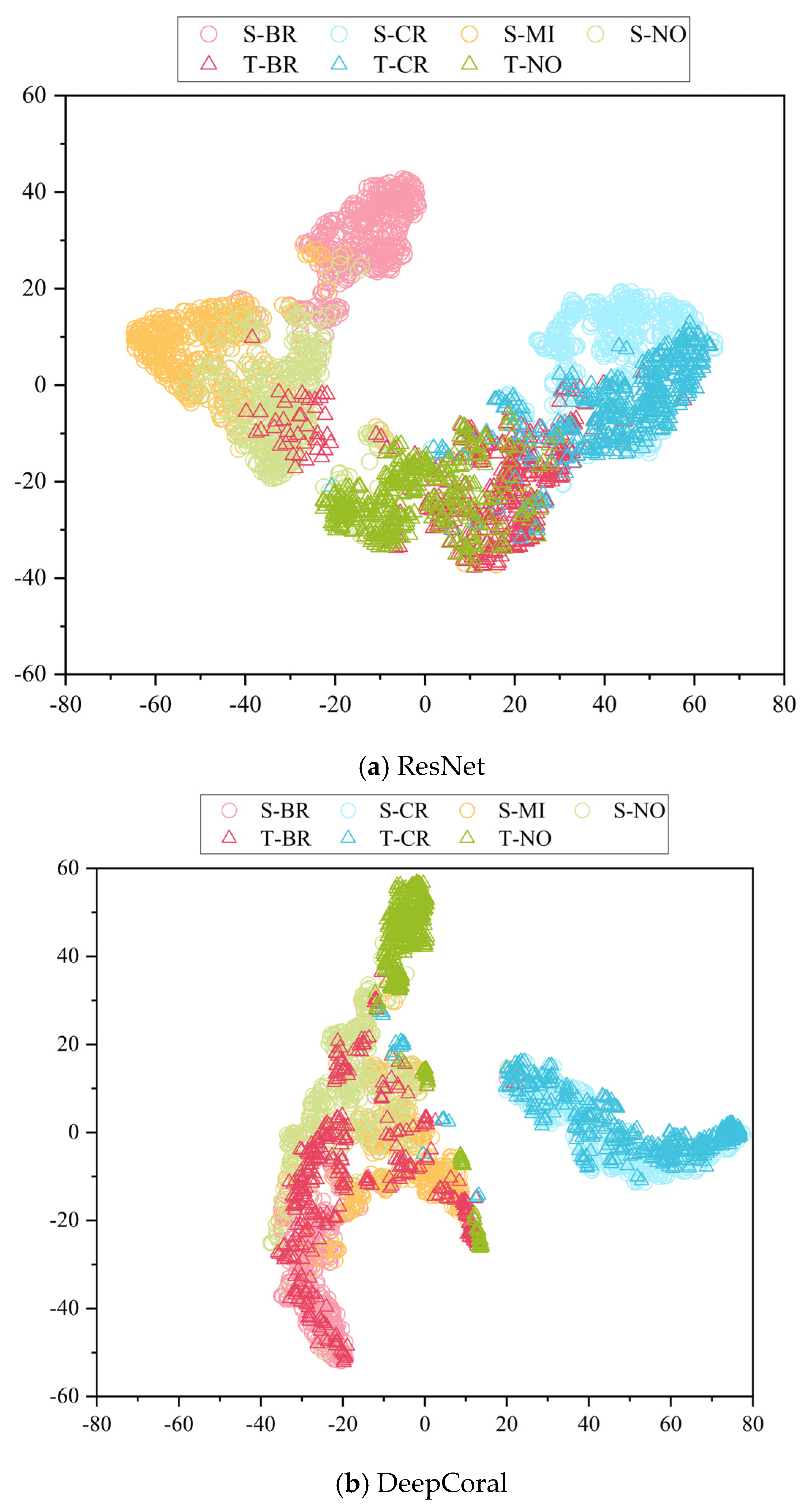
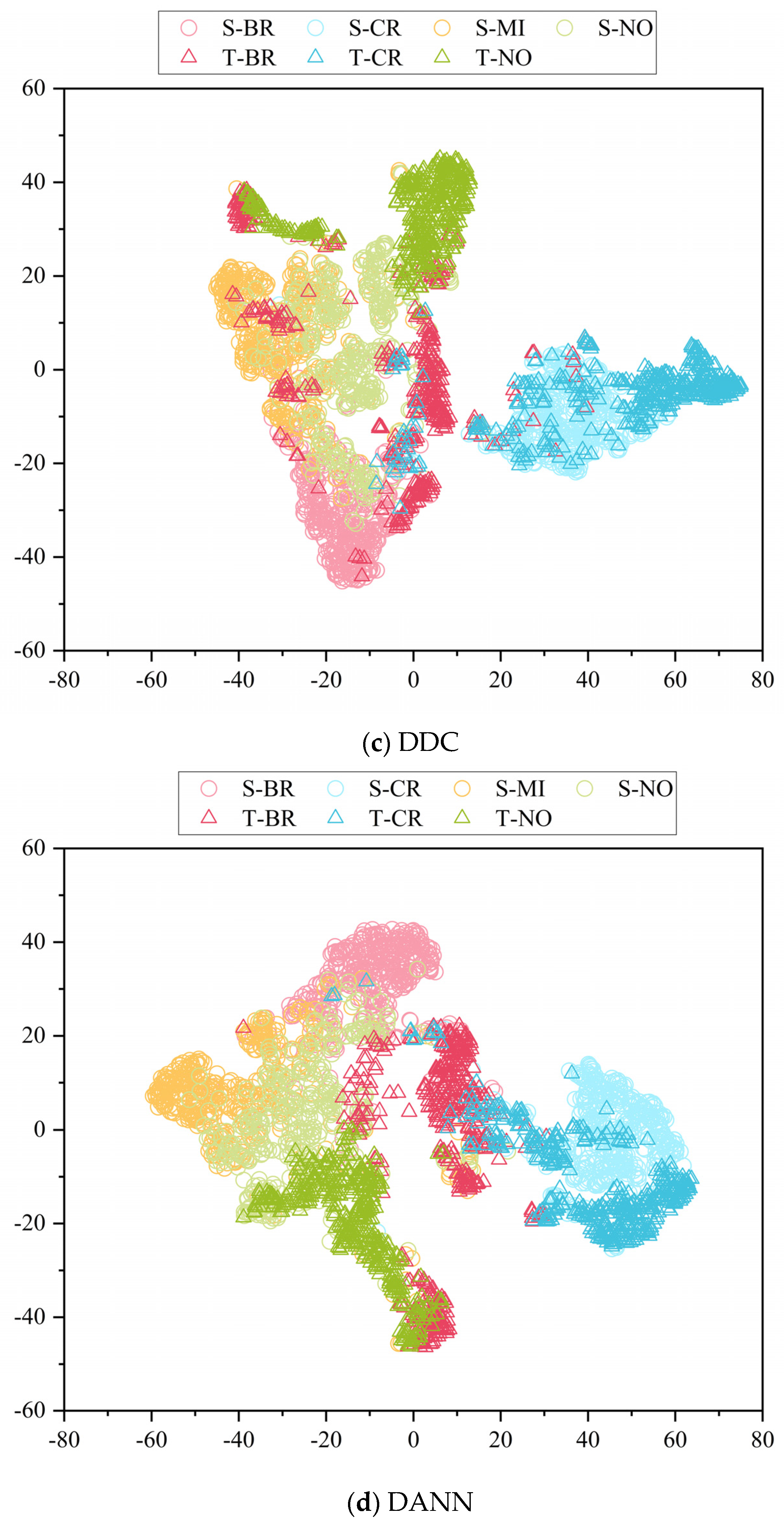
4.4. Feature Visualization Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Feng, Z.; Zhu, W.; Zhang, D. Time-Frequency demodulation analysis via Vold-Kalman filter for wind turbine planetary gearbox fault diagnosis under nonstationary speeds. Mech. Syst. Signal Process. 2019, 128, 93–109. [Google Scholar] [CrossRef]
- He, Z.; Shao, H.; Cheng, J.; Zhao, X.; Yang, Y. Support tensor machine with dynamic penalty factors and its application to the fault diagnosis of rotating machinery with unbalanced data. Mech. Syst. Signal Process. 2020, 141, 106441. [Google Scholar] [CrossRef]
- Kwak, J.; Lee, T.; Kim, C.O. An incremental clustering-based fault detection algorithm for class-imbalanced process data. IEEE Trans. Semicond. Manuf. 2015, 28, 318–328. [Google Scholar] [CrossRef]
- Li, D.; Zhao, Y.; Zhao, Y. A dynamic-model-based fault diagnosis method for a wind turbine planetary gearbox using a deep learning network. Prot. Control Mod. Power Syst. 2022, 7, 22. [Google Scholar] [CrossRef]
- Dong, Y.; Li, Y.; Zheng, H.; Wang, R.; Xu, M. A new dynamic model and transfer learning based intelligent fault diagnosis framework for rolling element bearings race faults: Solving the small sample problem. ISA Trans. 2022, 121, 327–348. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Gu, S.; Zhang, X.; Chen, T. Transfer learning for process fault diagnosis: Knowledge transfer from simulation to physical processes. Comput. Chem. Eng. 2020, 139, 106904. [Google Scholar] [CrossRef]
- Zhu, P.; Dong, S.; Pan, X.; Hu, X.; Zhu, S. A simulation-data-driven subdomain adaptation adversarial transfer learning network for rolling element bearing fault diagnosis. Meas. Sci. Technol. 2022, 33, 075101. [Google Scholar] [CrossRef]
- Liu, C.; Gryllias, K. Simulation-driven domain adaptation for rolling element bearing fault diagnosis. IEEE Trans. Ind. Inform. 2021, 18, 5760–5770. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Chow, T.W.; Gu, J.; Zhang, M. A Balanced Adversarial Domain Adaptation Method for Partial Transfer Intelligent Fault Diagnosis. IEEE Trans. Instrum. Meas. 2022, 71, 3526711. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ma, H.; Luo, Z.; Li, X. Partial transfer learning in machinery cross-domain fault diagnostics using class-weighted adversarial networks. Neural Netw. 2020, 129, 313–322. [Google Scholar] [CrossRef] [PubMed]
- Sun, R.; Liu, X.; Liu, S.; Xiang, J. A game theory enhanced domain adaptation network for mechanical fault diagnosis. Meas. Sci. Technol. 2022, 33, 115501. [Google Scholar] [CrossRef]
- Li, W.; Chen, Z.; He, G. A novel weighted adversarial transfer network for partial domain fault diagnosis of machinery. IEEE Trans. Ind. Inform. 2020, 17, 1753–1762. [Google Scholar] [CrossRef]
- Jiao, J.; Zhao, M.; Lin, J.; Ding, C. Classifier inconsistency-based domain adaptation network for partial transfer intelligent diagnosis. IEEE Trans. Ind. Inform. 2019, 16, 5965–5974. [Google Scholar] [CrossRef]
- Kuang, J.; Xu, G.; Tao, T.; Wu, Q.; Han, C.; Wei, F. Dual-weight Consistency-induced Partial Domain Adaptation Network for Intelligent Fault Diagnosis of Machinery. IEEE Trans. Instrum. Meas. 2022, 71, 3519612. [Google Scholar] [CrossRef]
- Cao, Z.; Long, M.; Wang, J.; Jordan, M.I. Partial transfer learning with selective adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 2724–2732. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Ganin, Y.; Ustinova, E.; Ajakan, H.; Germain, P.; Larochelle, H.; Laviolette, F.; Marchand, M.; Lempitsky, V. Domain-adversarial training of neural networks. J. Mach. Learn. Res. 2016, 17, 2096–2130. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Long, M.; Wang, J.; Ding, G.; Sun, J.; Yu, P.S. Transfer feature learning with joint distribution adaptation. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 2200–2207. [Google Scholar]
- Song, M.-M.; Xiong, Z.-C.; Zhong, J.-H.; Xiao, S.-G.; Tang, Y.-H. Research on fault diagnosis method of planetary gearbox based on dynamic simulation and deep transfer learning. Sci. Rep. 2022, 12, 17023. [Google Scholar] [CrossRef] [PubMed]
- Sun, B.; Saenko, K. Deep coral: Correlation alignment for deep domain adaptation. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 443–450. [Google Scholar]
- Tzeng, E.; Hoffman, J.; Zhang, N.; Saenko, K.; Darrell, T. Deep domain confusion: Maximizing for domain invariance. arXiv 2014, arXiv:1412.3474. [Google Scholar]
- Ganin, Y.; Lempitsky, V. Unsupervised domain adaptation by backpropagation. In Proceedings of the International conference on machine learning, Lille, France, 6–11 July 2015; pp. 1180–1189. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task Name | Dt Conditions | Dt Health Conditions |
|---|---|---|
| C1 | 30 Hz 0.8 A | BR, CR, MI |
| C2 | 20 Hz 0 A | BR, CR |
| C3 | 20 Hz 0.4 A | CR, NO |
| C4 | 40 Hz 0.8 A | CR |
| Task Name | Dt Conditions | Dt Health Conditions |
|---|---|---|
| C5 | 30 Hz 0 A | BR, CR, NO |
| C6 | 30 Hz 0.8 A | BR, CR, MI |
| C7 | 20 Hz 0 A | BR, CR |
| C8 | 20 Hz 0.4 A | CR, NO |
| C9 | 40 Hz 0.8 A | CR |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, M.; Xiong, Z.; Zhong, J.; Xiao, S.; Ren, J. Fault Diagnosis of Planetary Gearbox Based on Dynamic Simulation and Partial Transfer Learning. Biomimetics 2023, 8, 361. https://doi.org/10.3390/biomimetics8040361
Song M, Xiong Z, Zhong J, Xiao S, Ren J. Fault Diagnosis of Planetary Gearbox Based on Dynamic Simulation and Partial Transfer Learning. Biomimetics. 2023; 8(4):361. https://doi.org/10.3390/biomimetics8040361
Chicago/Turabian StyleSong, Mengmeng, Zicheng Xiong, Jianhua Zhong, Shungen Xiao, and Jihua Ren. 2023. "Fault Diagnosis of Planetary Gearbox Based on Dynamic Simulation and Partial Transfer Learning" Biomimetics 8, no. 4: 361. https://doi.org/10.3390/biomimetics8040361
APA StyleSong, M., Xiong, Z., Zhong, J., Xiao, S., & Ren, J. (2023). Fault Diagnosis of Planetary Gearbox Based on Dynamic Simulation and Partial Transfer Learning. Biomimetics, 8(4), 361. https://doi.org/10.3390/biomimetics8040361