1. Introduction
Conventional rigid-body robots have been widely used for delivering fast and precise motions. However, due to the bulky structure, difficult interaction in dynamic environments, and poor adaptability, it is hard or even impossible for rigid-body robots to accomplish some specific works, such as grasping different objects and walking through narrow curved paths [
1]. Originally inspired by nature, soft robots (normally composed of elastomers and gels) exhibit the advantages of light-weight, high energy density, mechanical compliance, low cost, and biocompatibility [
2]. These advantages endow soft robots with the merits of safe human–robot interaction while manipulating objects and adaptability to confined and dynamic environments. Soft robots exhibit great potential in soft exoskeletons, endoscopes, drug delivery, blood clot cleaning, and human assistance [
3,
4].
Biological inchworms (e.g., larva of Geometer moth) have been extensively studied as soft and rigid robots due to their simple and compliant structure. Inchworms move with an anchor push-pull strategy, i.e., anchoring their anterior leg and contracting the longitudinal muscles, pulling the posterior leg forward; anchoring the posterior leg and releasing the muscle, pushing the anterior leg forward and following the looping gait. Various inchworm-based soft robots have been developed with different actuators, such as dielectric elastomer (DE) [
5], shape memory alloy (SMA) [
6,
7], liquid crystalline elastomer (LCE) [
8], piezoelectric material (PEM) [
9], twisted and coiled polymer (TCP) [
10], and magneto-active elastomer (MAE) [
11,
12,
13,
14,
15,
16,
17]. Among them, MAE-based inchworms exhibit the advantages of strong load-carrying ability, small scale, flexibility, adaptability to harsh environments, and untethered structures [
11,
12,
13,
14,
15,
16,
17], making them the closest to the biological inchworm. Moreover, the magnetic field is easy to be decoupled from other stimuli, and the spatial gradients are intrinsic [
18,
19]. Thus, the MAE materials have been applied in crawling robots [
20], swimmers [
21], grippers [
22], micropumps [
23], and bionic robots [
11].
MAE materials for soft robots are desired with robust toughness, tear resistance, and low elastic modulus. The most popular fabrication method is to mix magnetic micro/nano-particles (soft or hard magnetic particles) with elastomer [
1,
24]. It is notable that 3D printing technology emerges as an effective method for developing complex MAE structures. Actually, hard magnetic particles (e.g., NdFeB) can maintain a given magnetization when no external magnetic field is applied, and vice versa for soft magnetic particles (e.g., Fe
3O
4). Generally, hard magneto-active elastomer (hMAE) can change its shape fast, while soft magneto-active elastomer (sMAE) can achieve a large reversible volume [
25]. With continuously distributed magnetization (or programmed magnetization) and a controlled magnetic field, the hMAE can obtain complex movements, such as jumping, crawling, gripping, and releasing, making it an ideal option for developing bionic robots [
17]. MAE-based inchworms can mainly be divided into three groups according to the modalities of magnetic materials, i.e., magnetic blocks [
15], magnetic filament [
11,
16], and magnetic particles [
12,
14]. In the literature, Joyee and Pan developed a 3D-printed inchworm robot with two permanent magnetic blocks at each end, serving as the two legs of the inchworm [
15]. However, the rigid part of the magnetic blocks will cause relatively large contact pressure and may induce damage to the crawling surface. The embedded aligned magnetic filament stiffens the soft structure, and the magnetization is also fixed, limiting its application in the biological area. Actually, the magnetic particles are uniformly distributed into elastomer, and the magnetization can be well adjusted by uni-axial magnetization [
26], continuously distributed magnetization [
14,
27], and programmed magnetization [
28]. The magnetic particle-based MAE inchworm robot outperforms the others in terms of softer structure, smaller size, and better flexibility.
Currently, the MAE-actuated inchworm robots (based on magnetic particles) are mostly actuated by electromagnetic coils [
14] or permanent magnets [
12]. The former has a confined workspace with complex mechanical and control systems. The latter permanent magnet-actuated MAE is more preferable for bionic magnetic inchworm robots. The existing magnetic inchworm robots require controlled magnetization or special 3D printing technology with custom-made or expensive instruments [
11,
12,
14,
16,
27], which impose difficulties in fabricating the simple-structure robot. Moreover, from the bionic perspective, the current magnetic inchworm robots are only constructed by magnetic sheets without legs and are driven by magnetic torques rather than the longitudinal muscle. By contrast, a biological inchworm utilizes longitudinal muscle to contract and release its body, with one leg fixed and the other leg moving with the body. Thus, the magnetic inchworm robot is expected to have easy fabrication and be more like a biological inchworm in terms of similar structures with legs and longitudinal muscle.
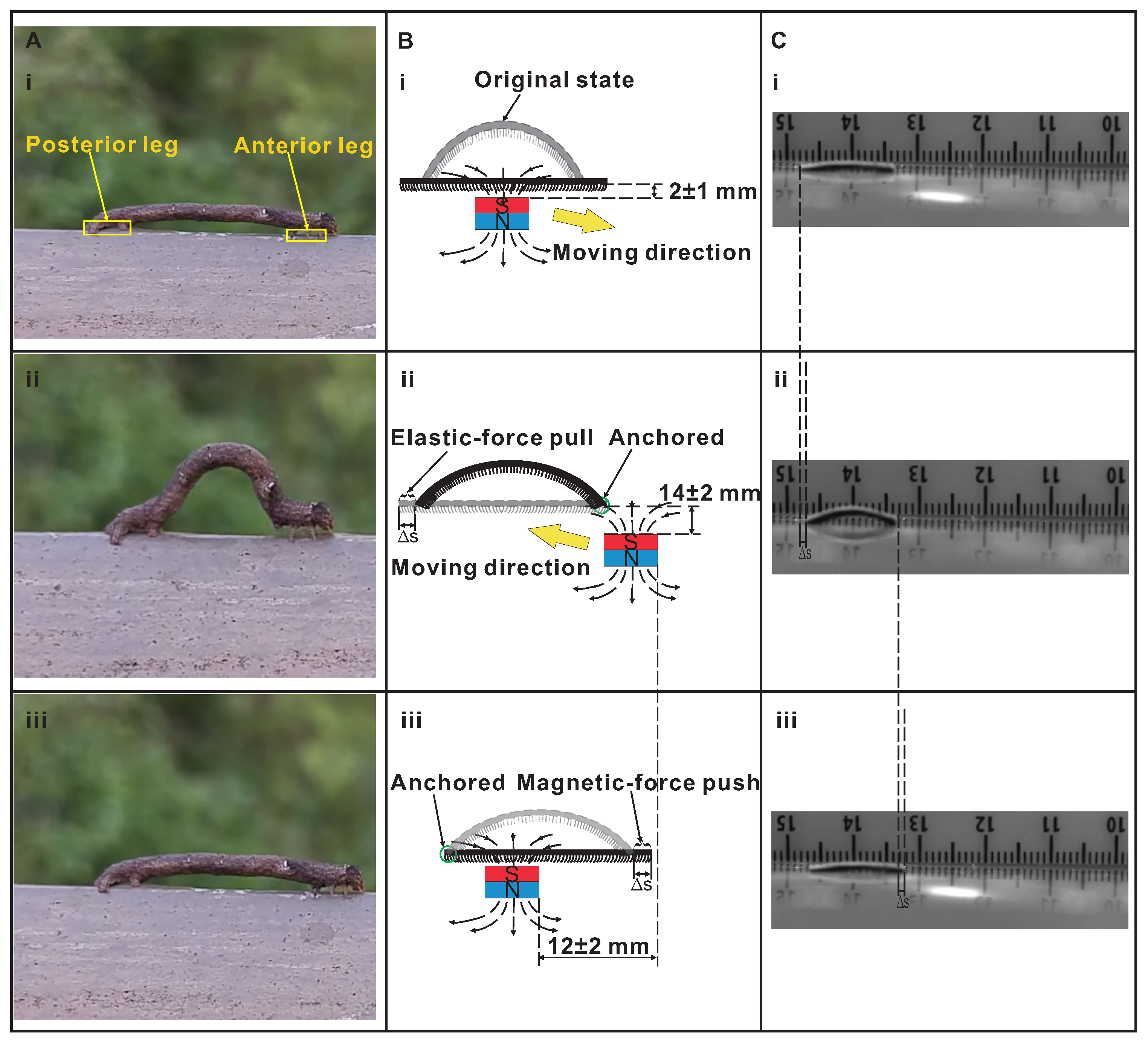
To this end, an easily-fabricated bionic magnetic inchworm robot composed of pre-strained MAE with micropillars is presented in this work. The pre-strained MAE is bonded with Polydimethylsiloxane (PDMS) substrate using double-sided tape, acting as a pre-load “muscle” to recover the arched shape when no magnetic field is applied. The pre-load muscle contracts the magnetic inchworm robot body to make the posterior section move forward when the anterior leg is fixed with micropillars by magnetic force. The magnetic micropillars are adopted as tiny legs to anchor the surface, like the biological inchworm gripping the ground surface. In this way, magnetization is not necessary for actuation, which simplifies the manufacturing process.
The main contribution of this work is the design of a new bionic magnetic inchworm robot. The robot adopts micropillars as bionic legs to anchor on the ground and uses pre-strained elastomer as the longitude muscle to contract the robot body, rather than a simply magnetized sheet, as used in the literature. The remaining parts of the paper are organized as follows. In
Section 2, the new magnetic inchworm robot is designed and fabricated. The robot parameters governing the locomotion performance are analyzed in
Section 3.
Section 4 presents the experimental results of the locomotion test for the fabricated magnetic inchworm robots. The conclusion is summarized in
Section 5.
3. Parametric Analysis of the Millirobot Design
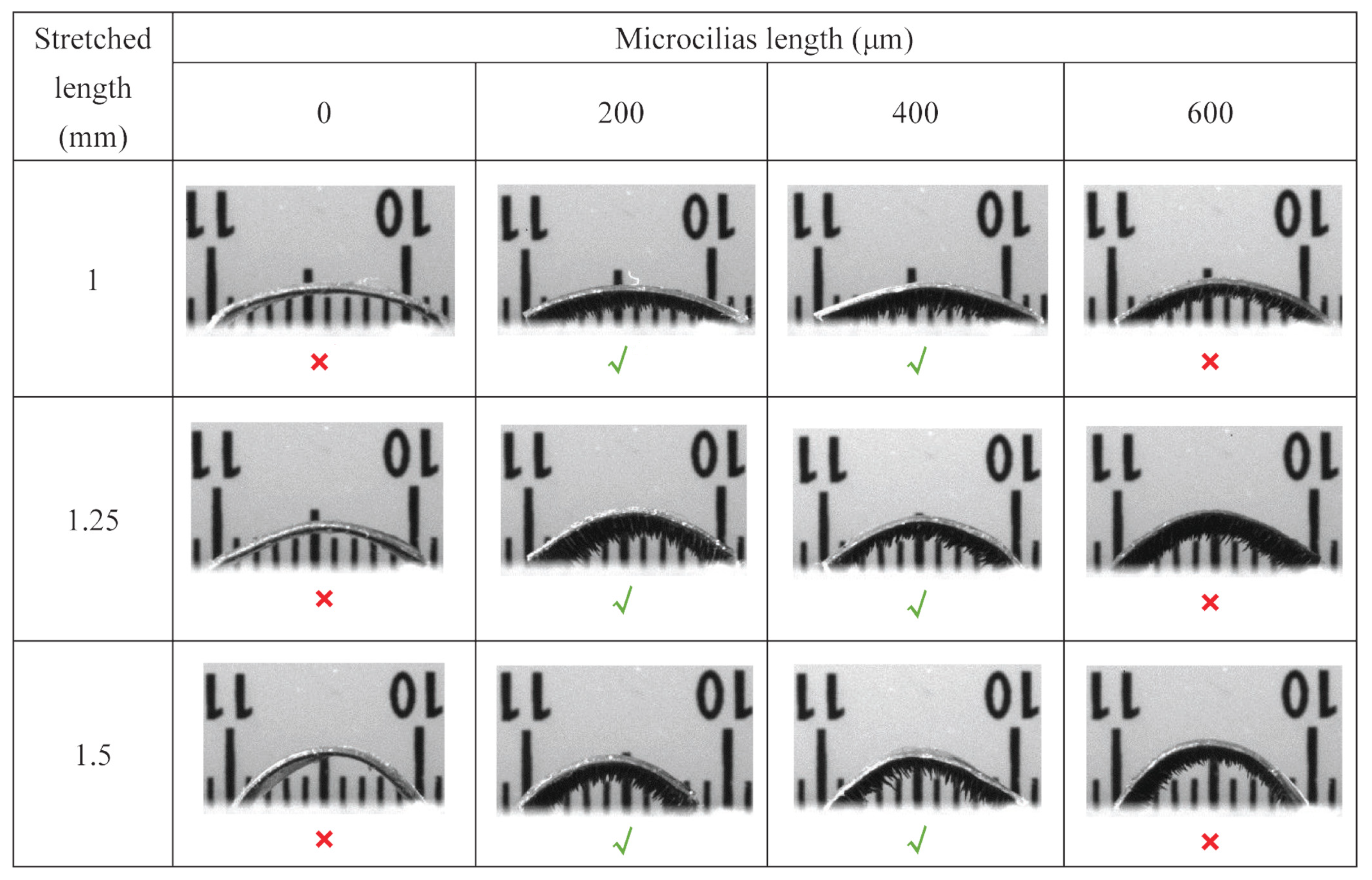
To design the magnetic inchworm robot, it is necessary to investigate the influence of the dominant parameters of the robot on the locomotion performance. In particular, the length-to-width ratio, length of micropillars, and stretched length parameters are studied by fabricating a series of millirobots with different sets of parameters. For illustration, the original length of the MAE film is selected as 14 mm, including an extra section (4 mm) for clamping in stretched equipment, and the lengths of double-sided adhesive tape and PDMS film are set as 10 mm.
First, the length-to-width ratio is determined by experimental testing. Specifically, the robots with three length-to-width ratios of 10/2.5, 10/5, and 10/7.5 are fabricated and tested. The purpose is to determine a feasible inchworm robot to analyze the effects of stretched length and the length of micropillars. The experimental results show that the magnetic inchworm robot with the length-to-width ratio of 10/5 can move like an inchworm crawling mechanism, whereas the robots with the other two length-to-width ratios can only be dragged forward by magnetic force because the friction is too small to anchor and the elastic force is too big to deform under length-to-width ratios of 10/2.5 and 10/7.5, respectively. Note that the ratio of 20/10 is used in [
12], which serves as a reference for the length-to-width ratio selection. Hence, the robot with a length-width ratio of 10/5 is chosen to provide a feasible platform for analyzing the two other important parameters, i.e., stretched length and the length of micropillars.
In particular, the effects of stretched length and length of micropillars are tested as follows. To verify the effectiveness of micropillars in locomotion and to determine the suitable length of micropillars, millirobots with different micropillar lengths (0, 200 µm, 400 µm, and 600 µm) are considered. Here, the length of micropillars describes the mean value of multiple micropillars for a specific robot and the length is positively associated with the volume of CIP microparticles. In addition, the original length of the magnetic inchworm robot is stretched by 1.00, 1.25, and 1.50 mm, which correspond to three arched inchworm robots with obviously different curvatures. A series of inchworm robots with different combinations of the design parameters, as mentioned above have been fabricated, as shown in
Figure 3. The locomotion performances have been evaluated by conducting experimental tests to verify whether the fabricated magnetic inchworm robots can move with a biological inchworm crawling mechanism.
To verify the necessity of the micropillars, three magnetic inchworm robots without micropillars are fabricated, as shown in column 1 of
Figure 3. It is found that the robots without micropillars cannot move like inchworm crawling mechanisms, whereas the robots with micropillars (e.g., lengths of 200 and 400 µm in columns 2 and 3 of
Figure 3) can move like a real inchworm. The reason lies in that the strong adhesion of PDMS in the substrate prevents the micropillars-free robot from moving forward. Meanwhile, the micropillars enable the separation between the substrate and robot body and provide certain friction. Moreover, the elastic deformation of the micropillars increases the coefficient of friction, assisting in anchoring the anterior leg during the locomotion. As a result, the magnetic inchworm robots with micropillars can move like an inchworm under permanent magnet actuation and elastic force action.
Concerning the length of micropillars, the magnetic inchworm robots with micropillar lengths of 200 and 400 µm can move like biological inchworm’s crawling mechanism, whereas the robots with a micropillar length of 600 µm cannot move, as illustrated in
Figure 3. This phenomenon indicates that the movement of the anterior leg must overcome the elastic force generated by the deformed micropillars and the friction to enable the locomotion of the robot. When the length of the micropillars is too long, the magnetic attraction force is smaller than the elastic force and friction force, resulting in no movement. Note that the movement of the magnetic inchworm robot is also governed by the coefficient of friction of the contact surface. In other words, the magnetic inchworm robot has different locomotion performances (e.g., step size and speed) under different surface roughness conditions.
Regarding the stretched length, the experimental results show that all of three sets of magnetic inchworm robots can move like real inchworms. However, different stretched lengths produce different curvatures for the robots. As a consequence, the elastic restoring forces are different, inducing different pre-load strains (see
Figure 2B(ii)). According to the test results of magnetic inchworm robots with three stretched lengths, the robot with a 1.00 mm stretched length produces a smaller step size, while the robot with a stretched length of 1.25 mm exhibits a larger step size. The robot with a stretched length of 1.50 mm offers a smaller step size than that of 1.25 mm. The reason lies in that the relatively large curvature generates too large of an elastic restoring force to be overcome (see
Figure 2B(i)) and exhibits a large contact angle and high center of gravity, which cause difficulty and instability in anchoring the anterior leg.
4. Experimental Results and Discussion of Millirobot Locomotion
To evaluate the locomotion performance of magnetic inchworm robots as illustrated in
Figure 3, these millirobots are tested for locomotion on an acrylic plane surface with a roughness of 0.3 µm. The inchworm robot is sensitive to the position and speed of the actuated permanent magnet, and hence, the permanent magnet is manually carried to move up and down diagonally, limited by the usable equipment. The movement speed of the magnet is approximately 18 ± 2.8 mm/s with the horizontal movement distance of 12 ± 2 mm and the vertical movement distance of 14 ± 2 mm. Considering the inevitable deviation for manual operation, the main parameter concerned is the maximum step size that the robot can achieve beyond the deviation of manual operation. Note that the movement speed should not be too high. Otherwise, the robot will turn over or be directly dragged away.
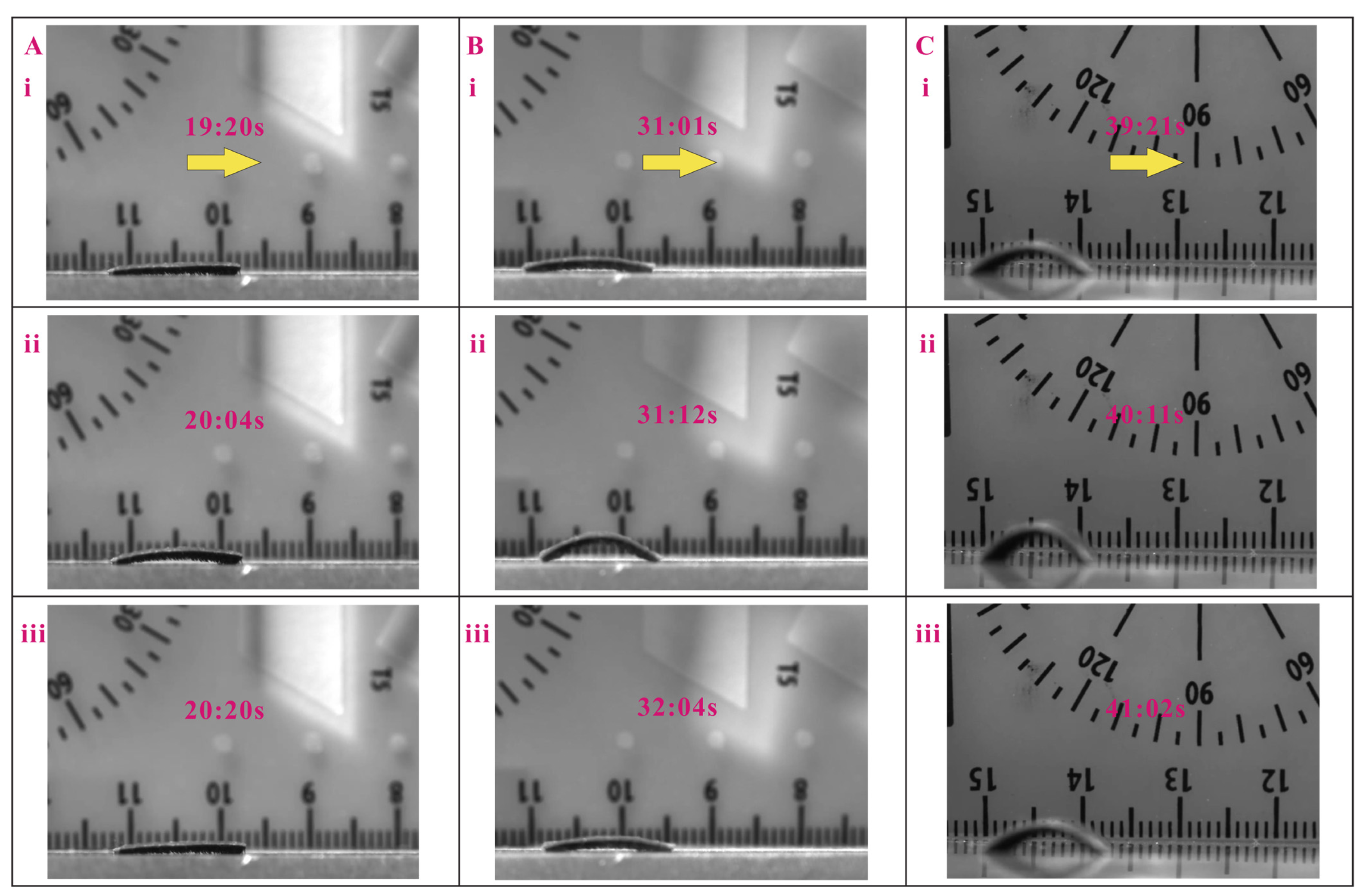
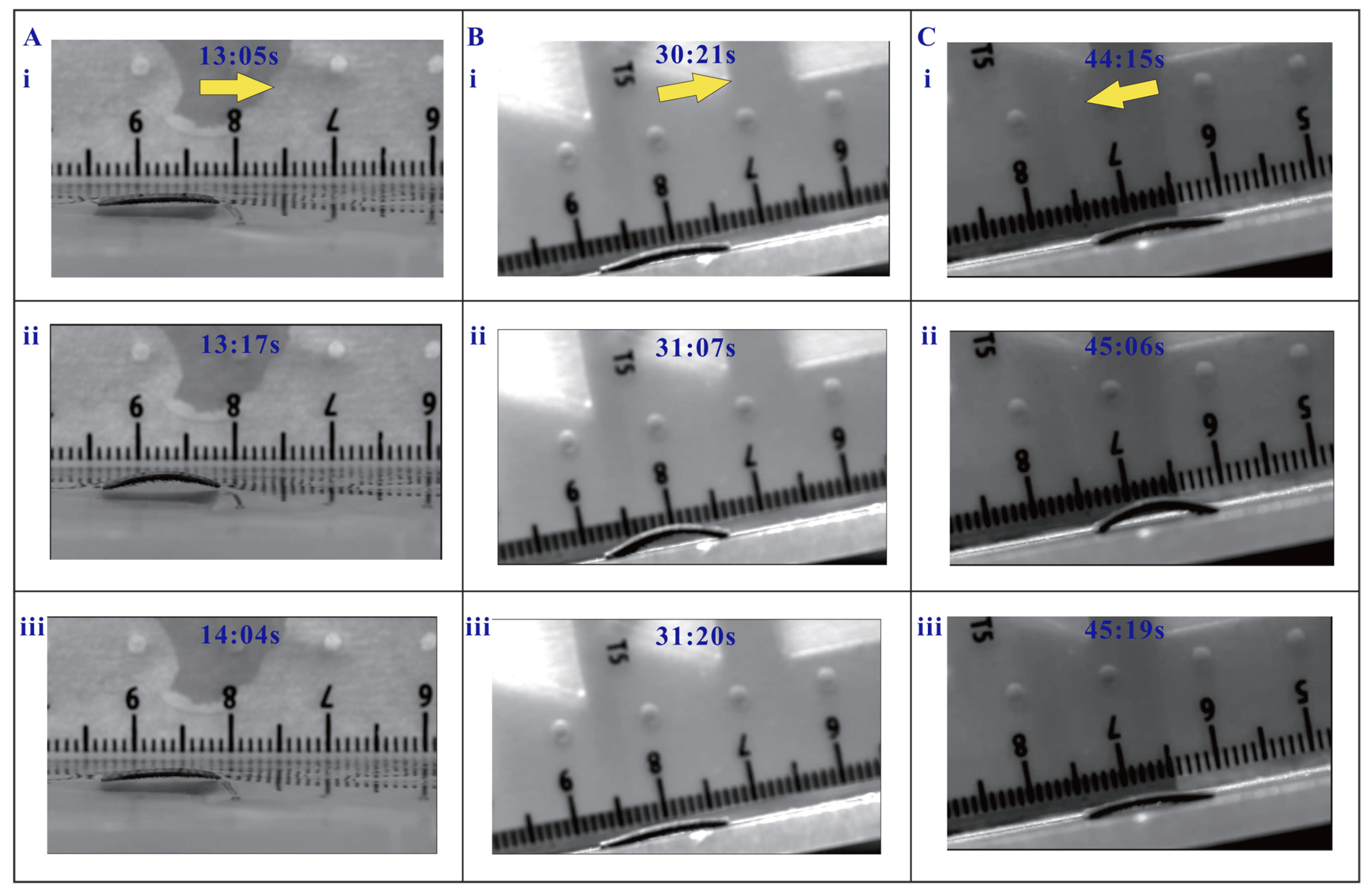
Multiple experiments have been conducted, and the full demonstrations of locomotion cycles for 5 mm displacement of the magnetic inchworm robots with micropillar lengths of 200 µand 400 µm are given in
Supplementary Videos S1 and S2. The video snapshots of one locomotion cycle of three magnetic inchworm robots with the same micropillars of 200 µm and different stretched lengths of 1.00, 1.25, and 1.50 mm are shown in
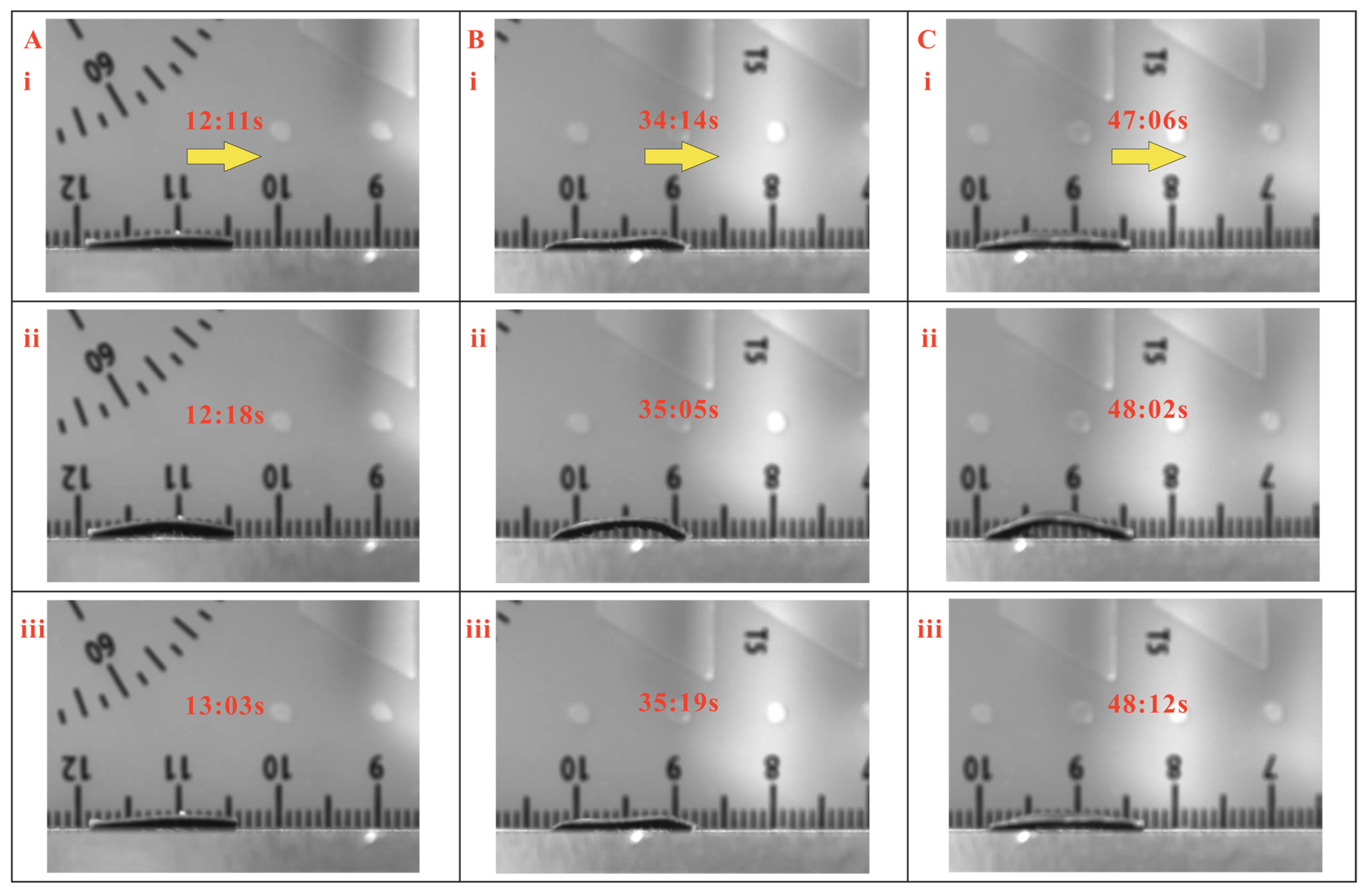
Figure 4. In addition, the test results of the three magnetic inchworm robots with the same micropillars of 400 µm are depicted in
Figure 5. The experimental results indicate that the proposed magnetic inchworm robots can successfully imitate the movement mechanism of biological inchworms with the anchoring pull-and-push strategy.
In view of the comparison of different stretched lengths, the magnetic inchworm robots with a stretched length of 1.25 mm produce a larger step size (see
Figure 4B) than the millirobots with stretched lengths of 1.00 mm and 1.50 mm. Hence, the stretched length of 1.25 mm enables a higher efficiency of locomotion. Concerning the length of micropillars, it mainly affects the coefficient of friction and the elastic restoring force of the deformed micropillars. The magnetic inchworm robots with shorter micropillars are suitable for moving on rough surfaces, whereas the millirobots with longer micropillars are more appropriate for moving on smooth surfaces.
Moreover, the proposed magnetic inchworm robot with a 1.25 mm stretched length and 200 µm micropillars has been tested to successfully move on wet surfaces with a water level height of 1 mm, and on an inclined plane surface with an inclination angle of 10°. The experimental results are shown in
Figure 6 and
Supplementary Video S3. It is notable that the friction forces on the surfaces in wet conditions and inclined planes for upward locomotion are smaller than those in flat plane surface locomotion, and the opposite is true for downward locomotion. Therefore, the step sizes of the millirobots for locomotion on wet surfaces and upward locomotion on inclined planes are smaller than that of the millirobot with downward locomotion on an inclined plane (see
Figure 6).
Considering that the mass, surface roughness, and body length considerably influence the speed of the magnetic inchworm robot, a comparison study versus existing magnetic inchworm robots has been conducted, as tabulated in
Table 1. As shown in
Supplementary Video S1, the inchworm robot (1.25 mm stretched length and 200 µm micropillars) moves a distance of 6 mm within 4 s. As compared with existing designs, the proposed magnetic inchworm robot can move on a smoother surface with similar self-mass and movement speed (considering the speed of the control mechanism). The main advantages of the proposed magnetic inchworm robot lie in the simplification of the fabrication and bionic similarity to real inchworms. The reported magnetic inchworm robot does not need extra special complex equipment to magnetize for fabrication. Actually, a square-shaped permanent magnet (about 400 mT) can be used to produce the micropillars. Like a biological inchworm using two legs to anchor and longitudinal muscle to complete pull-push motion, the proposed magnetic inchworm robot utilizes multi-micropillars to fix the two ends, and employs the elastic restoring force of pre-load longitudinal muscle and the magnetic force to achieve similar locomotion.
In practice, assembly errors are inevitably avoided during the fabrication, causing slight differences in the performance for the same series of fabricated millirobots. The main reason for the different performance is the manually inconsistent cutting of the double-sided adhesive tape and MAE. If they are cut in a standard pattern, the performance can be more consistent. Here, the function of anchoring is mainly achieved by magnetic attraction and elastic deformation of the micropillars. Nevertheless, this method requires careful movement control to anchor the anterior leg and, meanwhile, to prevent it from turning over or directly dragging away. In future work, the performance of the proposed magnetic inchworm robot will be further improved by specially designing both ends of the robot body to enhance the anchoring performance toward better locomotion on different surfaces.
5. Conclusions
In this paper, a new magnetic inchworm robot based on stretched elastomers and micropillars is presented. The stretched elastomer acts as pre-loaded muscle to contract to make the posterior leg move forward, similar to the longitudinal muscle in a real biological inchworm. The micropillars can separate the stick PDMS substrate from the contact surface and increase the coefficient of friction, contributing to the anchoring of one leg when moving forward. Analysis of the locomotion principle and influence of key design parameters of the magnetic inchworm robot on its locomotion performance has been performed. The experimental results show the fabricated magnetic inchworm robot can successfully imitate the locomotion strategy of a biological inchworm. As compared with existing magnetic inchworm robots, the proposed design (size of 10 mm × 5 mm, micropillars of 200 µm, and mass of 262 g) can move on smoother surfaces with similar mass and speed. The presented design enables a simpler fabrication process and is more like an inchworm in locomotion mechanism by using pre-load muscle and anchoring micropillars. Moreover, the proposed low-cost magnetic inchworm robot imposes no need for special magnetization for fabrication.
In future work, there are mainly three issues to be addressed. First, modeling the locomotion mechanism will be more convincing in proving the effectiveness of the micropillar in generating the asymmetric coefficient. Next, experiments will be carried out to measure the coefficients of friction with different sets of micropillars. Finally, intelligent control and standard fabrication process will be conducted to evaluate the reproducibility of the inchworm robot.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}