
Bio-Inspired Robots and Structures toward Fostering the Modernization of Agriculture

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
1.1. Global Agricultural Challenges and Need for Biomimetic Innovations
1.2. Review Framework
2. Biomimetic Innovations and Climate-Smart Agriculture
2.1. Intelligent Systems Connectivity and Cost
2.2. Soft Robotics in Commercial Harvesting
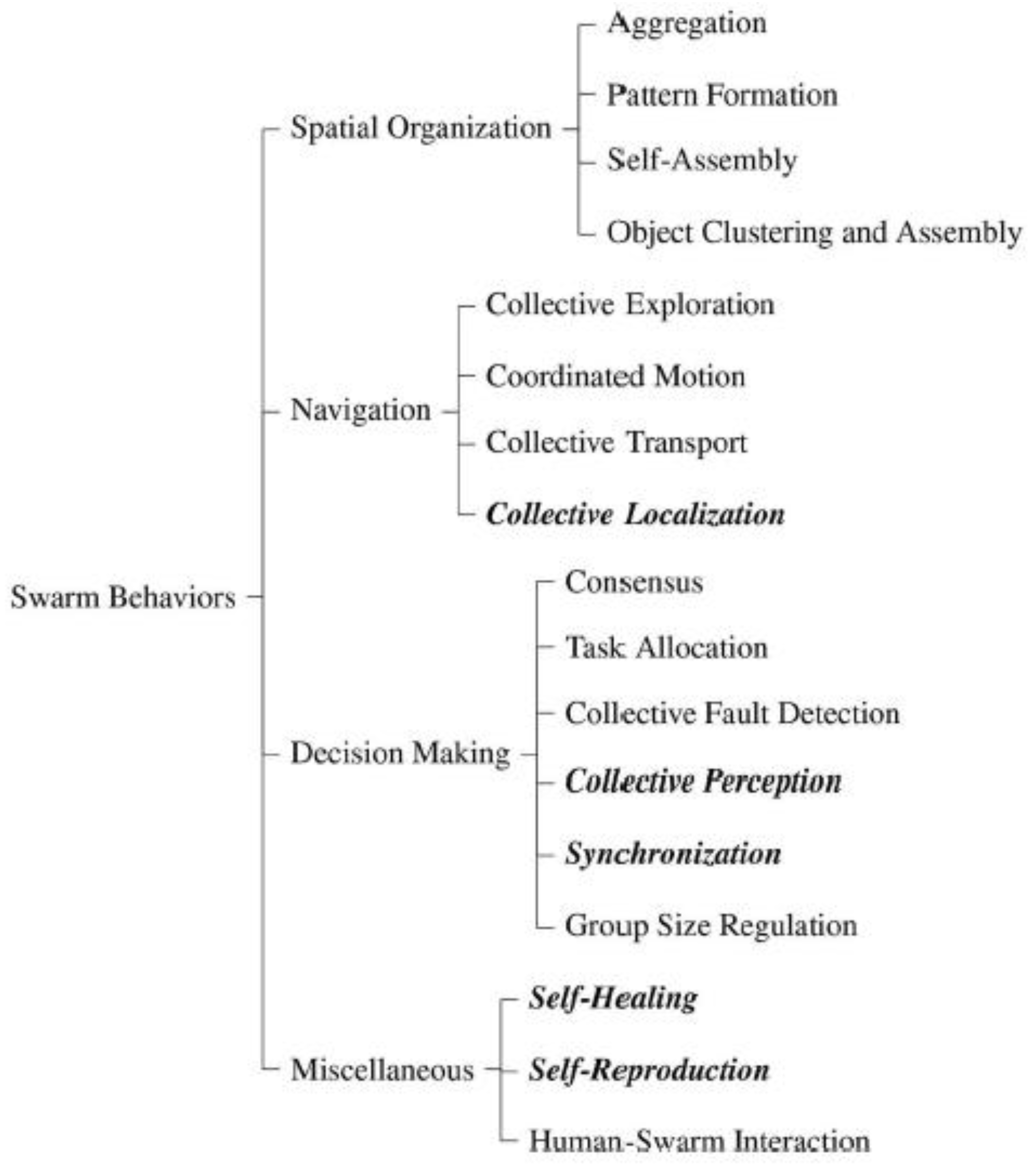
2.3. Swarm Robotics and Robot Bees
2.3.1. Case Studies of Commercial Adoption
2.3.2. Swarm Robotic Systems for Intelligent Pesticide Application
2.3.3. Robot-Animal Artifacts
3. Biomimetic Materials, Structures, and Resource Management
3.1. Biomimetic Materials
3.2. Biomimetic Structures
3.3. Resources Management—Solar Energy Harvesting
3.4. Water Resource Management
4. Future Prospects
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stojanovic, M. Biomimicry in Agriculture: Is the Ecological System-Design Model the Future Agricultural Paradigm? J. Agric. Environ. Ethics 2017, 32, 789–804. [Google Scholar] [CrossRef]
- Hwang, J.; Jeong, Y.; Park, J.M.; Lee, K.H.; Hong, J.W.; Choi, J. Biomimetics: Forecasting the future of science, engineering, and medicine. Int. J. Nanomed. 2015, 10, 5701–5713. [Google Scholar]
- Bounakoff, C.; Hayward, V.; Genest, J.; Michaud, F.; Beauvais, J. Artificial fast-adapting mechanoreceptor based on carbon nanotube percolating network. Sci. Rep. 2022, 12, 2818. [Google Scholar] [CrossRef] [PubMed]
- Kang, D.H.; Han, W.B.; Il Ryu, H.; Kim, N.H.; Kim, T.Y.; Choi, N.; Kim, T.S. Tunable and scalable fabrication of block copolymer-based 3D polymorphic artificial cell membrane array. Nat. Commun. 2022, 13, 1261. [Google Scholar] [CrossRef]
- Lukic, I.; Vulic, J.; Ivanovic, J. Antioxidant activity of PLA/PCL films loaded with thymol and/or carvacrol using scCO2 for active food packaging. Food Packag. Shelf Life 2020, 26, 100578. [Google Scholar] [CrossRef]
- González-Henríquez, C.M.; Sarabia-Vallejos, M.A.; Rodriguez-Hernandez, J. Progress in Polymer Science Polymers for additive manufacturing and 4D-printing: Materials, methodologies, and biomedical applications. Prog. Polym. Sci. 2019, 94, 57–116. [Google Scholar] [CrossRef]
- Baruah, S.; Dutta, Æ.J. Nanotechnology applications in pollution sensing and degradation in agriculture: A review. Environ. Chem. Lett. 2009, 7, 191–204. [Google Scholar] [CrossRef]
- Navas, E.; Fernández, R.; Sepúlveda, D.; Armada, M.; Gonzalez-de-Santos, P. Soft Gripper for Robotic Harvesting in Precision Agriculture Applications. In Proceedings of the 2021 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Santa Maria da Feira, Portugal, 28–29 April 2021; pp. 167–172. [Google Scholar]
- Blender, T.; Buchner, T.; Fernandez, B.; Pichlmaier, B.; Schlegel, C. Managing a Mobile Agricultural Robot Swarm for a seeding task. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6879–6886. [Google Scholar]
- Gleadow, R.; Hanan, J.; Dorin, A. Averting robo-bees: Why free-flying robotic bees are a bad idea. Emerg. Top. Life Sci. 2019, 3, 723–729. [Google Scholar]
- Vidwath, S.M.G.; Rohith, P.; Dikshithaa, R.; Nrusimha Suraj, N.; Chittawadigi, R.G.; Sambandham, M. Soft Robotic Gripper for Agricultural Harvesting BT. In Machines, Mechanism and Robotics; Springer: Singapore, 2022; pp. 1347–1353. [Google Scholar]
- Blok, V.; Gremmen, B. Agricultural technologies as living machines: Toward a biomimetic conceptualization of smart farming technologies. Ethics Policy Environ. 2018, 21, 246–263. [Google Scholar] [CrossRef]
- Shamshiri, R.R.; Kalantari, F.; Ting, K.C.; Thorp, K.R.; Hameed, I.A.; Weltzien, C.; Shad, Z.M. Advances in greenhouse automation and controlled environment agriculture: A transition to plant factories and urban agriculture. Int. J. Agric. Biol. Eng. Open 2018, 11, 1–22. [Google Scholar] [CrossRef]
- Raj, M.; Gupta, S.; Chamola, V.; Elhence, A.; Garg, T.; Atiquzzaman, M.; Niyato, D. A survey on the role of Internet of Things for adopting and promoting agriculture 4.0. J. Netw. Comput. Appl. 2021, 187, 103107. [Google Scholar] [CrossRef]
- Wong, K. Biomimicry: Using Nature’s Designs to Transform Agriculture. The Guardian. Available online: https://www.theguardian.com/sustainable-business/2015/oct/30/biomimicry-institute-sxsw-eco-agriculture-bioinspired (accessed on 20 April 2022).
- FAO-IFAD-UNICEF. The State of Food Security and Nutrition in the World 2021: Transforming Food Systems for Food Security, Improved Nutrition and Affordable Healthy Diet for All. 2021. Available online: https://reliefweb.int/report/world/brief-state-food-security-and-nutrition-world-2021-transforming-food-systems-food (accessed on 20 April 2022).
- United Nations. Global Issues: Food. 2021. Available online: https://wyss.harvard.edu/technology/robobees-autonomous-flying-microrobots/ (accessed on 20 April 2022).
- Food and Agricultural Organization of the United Nations. The Future of Food and Agriculture: Trends and Challenges; FAO: Rome, Italy, 2017. [Google Scholar]
- Pereira, M.; Oliveira, A.M. Poverty and food insecurity may increase as the threat of COVID-19 spreads. Public Heal. Nutr. 2020, 23, 3236–3240. [Google Scholar] [CrossRef] [PubMed]
- Galanakis, C.M. Environment and Climate-Smart Food Production; Springer International Publishing AG: Berlin/Heilderberg, Germany, 2021. [Google Scholar] [CrossRef]
- Gaspar, P.D.; Soares, V.N.G.J.; Caldeira, J.M.L.P.; Andrade, L.P.; Soares, C.D. Technological modernization and innovation of traditional agri-food companies based on ICT solutions—The Portuguese case study. J. Food Process. Preserv. 2019. [Google Scholar] [CrossRef] [Green Version]
- Alibabaei, K.; Gaspar, P.D.; Lima, T.M. Crop Yield Estimation Using Deep Learning Based on Climate Big Data and Irrigation Scheduling. Energies 2021, 14, 3004. [Google Scholar] [CrossRef]
- Alibabaei, K.; Gaspar, P.D.; Lima, T.M.; Campos, R.M.; Girão, I.; Monteiro, J.; Lopes, C.M. A Review of the Challenges of Using Deep Learning Algorithms to Support Decision-Making in Agricultural Activities. Remote Sens. 2022, 14, 638. [Google Scholar] [CrossRef]
- Maraveas, C. Durability Issues and Corrosion of Structural Materials and Systems in Farm Environment. Appl. Sci. 2020, 10, 990. [Google Scholar] [CrossRef] [Green Version]
- Maraveas, C.; Bartnazas, T. Application of internet of things for optimized greenhouse environments. AgriEngineering 2021, 3, 954–970. [Google Scholar] [CrossRef]
- Maraveas, C.; Bayer, I.S.; Bartzanas, T. 4D printing: Perspectives for the production of sustainable plastics for agriculture. Biotechnol. Adv. 2021, 54, 107785. [Google Scholar] [CrossRef]
- Maraveas, C. Production of Sustainable and Biodegradable Polymers from Agricultural Waste. Polymers 2020, 12, 1127. [Google Scholar] [CrossRef]
- Othmani, N.; Sahak, N.M.; Yunos, M.Y.M. Biomimicry in agrotechnology: Future solution of water problem for the agriculture industry? IOP Conf. Series Earth Environ. Sci. 2021, 756. [Google Scholar] [CrossRef]
- Gruber, M.F.; Wood, E.; Truelsen, S.; Østergaard, T.; Hélix-Nielsen, C. Computational Design of Biomimetic Phosphate Scavengers. Environ. Sci. Technol. 2015, 49, 9469–9478. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amend, J.; Cheng, N.; Fakhouri, S.; Culley, B. Soft Robotics Commercialization: Jamming Grippers from Research to Product. Soft Robot. 2016, 3, 213–222. [Google Scholar] [CrossRef] [PubMed]
- Chowdhary, G.; Gazzola, M.; Krishnan, G.; Soman, C.; Lovell, S. Soft Robotics as an Enabling Technology for Agroforestry Practice and Research. Sustainability 2019, 11, 6751. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef]
- Vause, C. This Robot Has Soft Hands. It Could Be the Future of Sustainable Production. 2018. Available online: https://www.weforum.org/agenda/2018/06/robot-soft-hands-sustainable-production-soft-robotics/ (accessed on 25 April 2022).
- Gonzalez-de-Santos, P.; Fernández, R.; Sepúlveda, D.; Navas, E.; Emmi, L.; Armada, M. Field robots for intelligent farms—inhering features from industry. Agronomy 2020, 10, 1638. [Google Scholar] [CrossRef]
- Rial-Lovera, R. Agricultural Robots: Drivers, barriers and opportunities for adoption. In Proceedings of the 14th International Conference on Precision Agriculture, Montreal, QC, Canada, 24–27 June 2018; pp. 24–27. [Google Scholar]
- Albani, D.; Manoni, T.; Arik, A.; Nardi, D.; Trianni, V. Field Coverage for Weed Mapping: Toward Experiments with a UAV Swarm. In Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering (LNICST); Springer: Cham, Switzerland, 2019; Volume 289, pp. 132–146. [Google Scholar] [CrossRef]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm Intell Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef] [Green Version]
- Gornall, J.; Betts, R.; Burke, E.; Clark, R.; Camp, J.; Willett, K.; Wiltshire, A. Implications of climate change for agricultural productivity in the early twenty-first century. Philos. Trans. R. Soc. B Biol. Sci. 2010, 365, 2973–2989. [Google Scholar] [CrossRef]
- Sivakumar, M.V.K. Interactions between climate and desertification. Agric. For. Meteorol. 2007, 142, 143–155. [Google Scholar] [CrossRef]
- UNCCD. Urbanisation to Cause Huge Loss of Prime Farmland. 2019. Available online: https://www.downtoearth.org.in/news/agriculture/urbanisation-to-cause-huge-loss-of-prime-farmland-unccd-66562 (accessed on 20 April 2022).
- OCHA. The High Price of Desertification: 23 Hectares of Land a Minute; OCHA: Geneva, Switzerland, 2017. [Google Scholar]
- Shukla, P.R.; Skea, J.; Buendia, E.C.; Masson-Delmotte, V.; Pörtner, H.-O.; Roberts, D.C.; Zhai, P.; Slade, R.; Connors, S.; van Diemen, R.; et al. (Eds.) Intergovernmental Panel on Climate Change. In Climate Change and Land: An IPCC Special Report on Climate Change, Desertification, Land Degradation, Sustainable Land Management, Food Security, and Greenhouse Gas Fluxes in Terrestrial Ecosystems; 2019; Available online: https://www.ipcc.ch/srccl/download/ (accessed on 25 April 2022).
- Jellason, N.; Robinson, E.; Ogbaga, C. Agriculture 4.0: Is Sub-Saharan Africa Ready? Appl. Sci. 2021, 11, 5750. [Google Scholar] [CrossRef]
- Mehmood, A. Effects of Rent Seeking and Its Three Forms (Corruption, Bribery and Lobbying) on Entrepreneurship; Umea University: Umea, Sweden, 2014. [Google Scholar]
- Ovadia, J.S. The Nigerian “One Percent” and the Management of National Oil Wealth Through Nigerian Content. Sci. Soc. 2013, 77, 315–341. [Google Scholar] [CrossRef]
- Uwakonye, M.N.; Osho, G.S.; Anucha, H. The Nigerian Economy: A Rural Sector. Int. Bus. Econ. Res. J. 2006, 5, 61–78. [Google Scholar]
- Li, D.; Sun, X.; Elkhouchlaa, H.; Jia, Y.; Yao, Z.; Lin, P.; Li, J.; Lu, H. Fast detection and location of longan fruits using UAV images. Comput. Electron. Agric. 2021, 190, 106465. [Google Scholar] [CrossRef]
- Ahimbisibwe, F. Uganda and the refugee problem: Challenges and opportunities. Afr. J. Polit. Sci. Int. Relat. 2019, 13, 62–72. [Google Scholar] [CrossRef] [Green Version]
- Balafoutis, A.; Beck, B.; Fountas, S.; Vangeyte, J.; Van Der Wal, T.; Soto, I.; Gómez-Barbero, M.; Barnes, A.; Eory, V. Precision Agriculture Technologies Positively Contributing to GHG Emissions Mitigation, Farm Productivity and Economics. Sustainability 2017, 9, 1339. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-De-Soto, M.; Emmi, L.; Benavides, C.; Garcia, I.; Gonzalez-De-Santos, P. Reducing air pollution with hybrid-powered robotic tractors for precision agriculture. Biosyst. Eng. 2016, 143, 79–94. [Google Scholar] [CrossRef]
- Chen, C.-J.; Huang, Y.-Y.; Li, Y.-S.; Chen, Y.-C.; Chang, C.-Y.; Huang, Y.-M. Identification of Fruit Tree Pests With Deep Learning on Embedded Drone to Achieve Accurate Pesticide Spraying. IEEE Access 2021, 9, 21986–21997. [Google Scholar] [CrossRef]
- Cunha, J.; Gaspar, P.D.; Assunção, E.; Mesquita, R. Prediction of the Vigor and Health of Peach Tree Orchard. In Proceedings of the International Conference on Computational Science and Its Applications, Cagliary, Italy, 5–8 July 2021; Springer: Cham, Switzerland, 2021; pp. 541–551. [Google Scholar] [CrossRef]
- Assuncao, E.; Diniz, C.; Gaspar, P.D.; Proenca, H. Decision-making support system for fruit diseases classification using Deep Learning. In Proceedings of the International Conference on Decision Aid Sciences and Application (DASA), Sakheer, Bahrain, 8–9 November 2020; pp. 652–656. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, R.; Lin, Y.; Li, C.; Chen, S.; Yuan, Z.; Chen, S.; Zou, X. Plant Disease Recognition Model Based on Improved YOLOv5. Agronomy 2022, 12, 365. [Google Scholar] [CrossRef]
- University of New South Wales. Robotic tractor to deliver precision planting. Phys. Org. 2013. [Google Scholar]
- Williams, A. Cutting-Edge Agricultural Robots Offers a Low-Cost Lifeline to UK Farmers; University of Plymouth: Plymouth, UK, 2020. [Google Scholar]
- Wu, F.; Duan, J.; Chen, S.; Ye, Y.; Ai, P.; Yang, Z. Multi-Target Recognition of Bananas and Automatic Positioning for the Inflorescence Axis Cutting Point. Front. Plant Sci. 2021, 12, 705021. [Google Scholar] [CrossRef]
- Varandas, L.; Faria, J.; Gaspar, P.D.; Aguiar, M.L. Low-Cost IoT Remote Sensor Mesh for Large-Scale Orchard Monitorization. J. Sens. Actuator Netw. 2020, 9, 44. [Google Scholar] [CrossRef]
- Dube, E.E. Wireless Farming: A Mobile and Wireless Sensor Network Based Application to Create Farm Field Monitoring and Plant Protection for Sustainable Crop Production and Poverty Reduction Reduction; Malmö University: Malmö, Swedem, 2013. [Google Scholar]
- Rajasekaran, T.; Anandamurugan, S. Challenges and Applications of Wireless Sensor Networks in Smart Farming—A Survey; Springer: Singapore, 2018; Volume 750, pp. 353–361. [Google Scholar] [CrossRef]
- Canakci, M.; Emekli, N.Y.; Bilgin, S.; Caglayan, N. Heating requirement and its costs in greenhouse structures: A case study for Mediterranean region of Turkey. Renew. Sustain. Energy Rev. 2013, 24, 483–490. [Google Scholar] [CrossRef]
- Antony, A.P.; Leith, K.; Jolley, C.; Lu, J.; Sweeney, D.J. A Review of Practice and Implementation of the Internet of Things (IoT) for Smallholder Agriculture. Sustainability 2020, 12, 3750. [Google Scholar] [CrossRef]
- Zhang, K.; Lv, H.; Zheng, Y.; Yao, Y.; Li, X.; Yu, J.; Ding, B. Nanofibrous hydrogels embedded with phase-change materials: Temperature-responsive dressings for accelerating skin wound healing. Compos. Commun. 2021, 25, 100752. [Google Scholar] [CrossRef]
- Allakhverdiev, S.I. Photosynthetic and biomimetic hydrogen production. Int. J. Hydrogen Energy 2012, 37, 8744–8752. [Google Scholar] [CrossRef]
- Kishore, H. Economic and Environmental Impact of AI and IOT Based Precision Agriculture on Small and Mid-Scale Farmers Economic and Environmental Impact of AI and IOT Based Precision Agriculture On Small and Mid-Scale Farmers; Bournemouth University: Bournemouth, UK, 2020; pp. 1–4. [Google Scholar]
- Sonneveld, P.; Swinkels, G.; Campen, J.; van Tuijl, B.; Janssen, H.; Bot, G. Performance results of a solar greenhouse combining electrical and thermal energy production. Biosyst. Eng. 2010, 106, 48–57. [Google Scholar] [CrossRef]
- Alsalam, B.H.Y.; Morton, K.; Campbell, D.; Gonzalez, F. Autonomous UAV with vision based on-board decision making for remote sensing and precision agriculture. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–12. [Google Scholar]
- Foresti, R.; Rossi, S.; Magnani, M.; Bianco, C.G.L.; Delmonte, N. Smart Society and Artificial Intelligence: Big Data Scheduling and the Global Standard Method Applied to Smart Maintenance. Engineering 2020, 6, 835–846. [Google Scholar] [CrossRef]
- Patil, V.C.; Al-Gaadi, K.A.; Biradar, D.P.; Rangaswamy, M. Internet of Things (Iot) and Cloud Computing for Agriculture: An Overview. In Proceedings of the Agro-Informatics and Precision Agriculture (AIPA 2012), Hyderabad, India, 1 August 2012; pp. 292–296. [Google Scholar]
- Hernández-morales, C.A.; Luna-rivera, J.M.; Perez-jimenez, R. Design and deployment of a practical IoT-based monitoring system for protected cultivations. Comput. Commun. 2022, 186, 51–64. [Google Scholar] [CrossRef]
- Sagheer, A.; Mohammed, M.; Riad, K.; Alhajhoj, M. A Cloud-Based IoT Platform for Precision Control of Soilless Greenhouse Cultivation. Sensors 2020, 21, 223. [Google Scholar] [CrossRef]
- Rojas, A. Smart Agriculture IoT with Cloud Computing. Rev. Hist. América 2015, 29, 37–66. [Google Scholar]
- Park, J.H.; Lee, S.; Yun, S.; Kim, H.; Kim, W.-T. Dependable Fire Detection System with Multifunctional Artificial Intelligence Framework. Sensors 2019, 19, 2025. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lemayian, J.P.; Hamamreh, J.M. Drone-Based Smart Rescue System for Critical Situation Management in Future Wireless Networks. RS Open J. Innov. Commun. Technol. 2020, 1, 1–12. [Google Scholar]
- Bo, Y.; Wang, H. The Application of Cloud Computing and the Internet of Things in Agriculture and Forestry. In Proceedings of the 2011 International Joint Conference on Service Sciences, Taipei, Taiwan, 25–27 May 2011; pp. 168–172. [Google Scholar] [CrossRef]
- He, M.; Shi, J. Circulation traceability system of Chinese herbal medicine supply chain based on internet of things agricultural sensor. Sustain. Comput. Inform. Syst. 2021, 30, 100518. [Google Scholar] [CrossRef]
- Singh, R.K.; Berkvens, R.; Weyn, M. Energy Efficient Wireless Communication for IoT Enabled Greenhouses. In Proceedings of the 2020 International Conference on Communication Systems & NETworkS (COMSNETS), Bengaluru, India, 7–11 January 2020; pp. 885–887. [Google Scholar] [CrossRef]
- Madushanki, R.; Wirasagoda, H.; Halgamuge, M.; Syed, A. Adoption of the Internet of Things (IoT) in agriculture and smart farming towards urban greening: A review. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 11–28. [Google Scholar] [CrossRef] [Green Version]
- Agrawal, H.; Prieto, J.; Ramos, C.; Corchado, J.M. Smart feeding in farming through IoT in silos. Adv. Intell. Syst. Comput. 2016, 530, 355–366. [Google Scholar] [CrossRef] [Green Version]
- Duckett, T.; Pearson, S.; Blackmore, S.; Grieve, B. Agricultural Robotics: The Future of Robotic Agriculture. arXiv 2018, arXiv:1806.06762. [Google Scholar]
- Vlachopoulou, M.; Ziakis, C.; Vergidis, K.; Madas, M. Analyzing AgriFood-Tech e-Business Models. Sustainability 2021, 13, 5516. [Google Scholar] [CrossRef]
- Wang, T.; Xu, X.; Wang, C.; Li, Z.; Li, D. From Smart Farming towards Unmanned Farms: A New Mode of Agricultural Production. Agriculture 2021, 11, 145. [Google Scholar] [CrossRef]
- Peng, Y.; Liu, Y.; Yang, Y.; Yang, Y.; Liu, N.; Sun, Y. Research progress on application of soft robotic gripper in fruit and vegetable picking. Trans. Chin. Soc. Agric. Eng. 2018, 34, 11–20. [Google Scholar]
- Hussein, Z.; Fawole, O.; Opara, U.L. Harvest and Postharvest Factors Affecting Bruise Damage of Fresh Fruits. Hortic. Plant J. 2019, 6, 1–13. [Google Scholar] [CrossRef]
- Martinez-Romero, D.; Serrano, M.; Carbonell, A.; Castillo, S.; Riquelme, F.; Valero, D. Mechanical Damage During Fruit Post-Harvest Handling: Technical and Physiological Implications BT—Production Practices and Quality Assessment of Food Crops: Quality Handling and Evaluation. In Production Practices and Quality Assessment of Food Crops; Dris, R., Jain, M.S., Eds.; Springer: Dordrecht, The Netherlands, 2004; pp. 233–252. [Google Scholar]
- Navas, E.; Fernández, R.; Sepúlveda, D.; Armada, M.; Gonzalez-de-Santos, P. Soft grippers for automatic crop harvesting: A review. Sensors 2021, 21, 2689. [Google Scholar] [CrossRef] [PubMed]
- Biomimicry New England, Biomimetic Innovations Are Hindered by Challenges to Implementation, Not Inspiration. 2022. Available online: https://www.biomimicryne.org/blog/2016/5/10/biomimetic-innovations-are-hindered-by-their-implementation-not-their-inspiration (accessed on 20 April 2022).
- Miranda, M.; Spricigo, P.C.; Ferreira, M.D. Mechanical damage during harvest and loading affect orange postharvest quality. Eng. Agric. 2015, 35, 154–162. [Google Scholar] [CrossRef] [Green Version]
- Porat, R.; Lichter, A.; Terry, L.A.; Harker, R.; Buzby, J. Postharvest losses of fruit and vegetables during retail and in consumers ’ homes: Quantifications, causes, and means of prevention. Postharvest Biol. Technol. 2018, 139, 135–149. [Google Scholar] [CrossRef] [Green Version]
- Swarm Robotics for Agricultural Applications, SAGA Experiment. 2022. Available online: https://echord.eu/saga.html (accessed on 25 April 2022).
- James, A. Food and Farming Technology. Food Farming Technol. 2021. [Google Scholar]
- Dent, M.; Wang, Y. Agricultural Robotics Market 2022–2032. 2022. Available online: https://www.idtechex.com/zh/research-report/agricultural-robotics-market-2022-2032/837 (accessed on 22 April 2022).
- Zhang, E.M. Understanding the Acceptance of Mobile SMS Advertising among Young Chinese Consumers. Psychol. Mark. 2010, 30, 461–469. [Google Scholar] [CrossRef]
- Assunção, E.T.; Gaspar, P.D.; Mesquita, R.J.M.; Simões, M.P.; Ramos, A.; Proença, H.; Inacio, P.R.M. Peaches Detection Using a Deep Learning Technique—A Contribution to Yield Estimation, Resources Management, and Circular Economy. Climate 2022, 10, 11. [Google Scholar] [CrossRef]
- Nityananda, V.; Read, J. Stereopsis in animals: Evolution, function and mechanisms. J. Exp. Biol. 2017, 220, 2502–2512. [Google Scholar] [CrossRef] [Green Version]
- Vázquez-Arellano, M.; Griepentrog, H.W.; Reiser, D.; Paraforos, D.S. 3-D Imaging Systems for Agricultural Applications—A Review. Sensors 2016, 16, 618. [Google Scholar] [CrossRef] [Green Version]
- Chu, X.; Miao, P.; Zhang, K.; Wei, H.; Fu, H.; Liu, H.; Jiang, H.; Ma, Z. Green Banana Maturity Classification and Quality Evaluation Using Hyperspectral Imaging. Agriculture 2022, 12, 530. [Google Scholar] [CrossRef]
- Psiroukis, V.; Espejo-Garcia, B.; Chitos, A.; Dedousis, A.; Karantzalos, K.; Fountas, S. Assessment of Different Object Detectors for the Maturity Level Classification of Broccoli Crops Using UAV Imagery. Remote Sens. 2022, 14, 731. [Google Scholar] [CrossRef]
- Trieu, N.M.; Thinh, N.T. Quality Classification of Dragon Fruits Based on External Performance Using a Convolutional Neural Network. Appl. Sci. 2021, 11, 10558. [Google Scholar] [CrossRef]
- Zhang, G.; Fu, Q.; Fu, Z.; Li, X.; Matetić, M.; Bakaric, M.B.; Jemrić, T. A Comprehensive Peach Fruit Quality Evaluation Method for Grading and Consumption. Appl. Sci. 2020, 10, 1348. [Google Scholar] [CrossRef] [Green Version]
- Abbaspour-Gilandeh, Y.; Aghabara, A.; Davari, M.; Maja, J.M. Feasibility of Using Computer Vision and Artificial Intelligence Techniques in Detection of Some Apple Pests and Diseases. Appl. Sci. 2022, 12, 906. [Google Scholar] [CrossRef]
- Rasheed, S.U.; Muhammad, W.; Qaiser, I.; Irshad, M.J. A Multispectral Pest-Detection Algorithm for Precision Agriculture. Eng. Proc. 2021, 12, 46. [Google Scholar] [CrossRef]
- Kragh, M.F.; Christiansen, P.; Laursen, M.; Steen, K.A.; Green, O.; Karstoft, H.; Jørgensen, R.N. FieldSAFE: Dataset for Obstacle Detection in Agriculture. Sensors 2017, 17, 2579. [Google Scholar] [CrossRef] [Green Version]
- Yun, C.; Kim, H.-J.; Jeon, C.-W.; Gang, M.; Lee, W.S.; Han, J.G. Stereovision-based ridge-furrow detection and tracking for auto-guided cultivator. Comput. Electron. Agric. 2021, 191, 106490. [Google Scholar] [CrossRef]
- Navarro, I.; Matía, F. An Introduction to Swarm Robotics. ISRN Robot. 2013, 2013, 608164. [Google Scholar] [CrossRef] [Green Version]
- Jevtić, A.; Gazi, P.; Andina, D.; Jamshidi, M.O. Building a swarm of robotic bees. In Proceedings of the 2010 World Automation Congress, Kobe, Japan, 19–23 September 2010; pp. 1–6. [Google Scholar]
- Gonzalez-De-Santos, P.; Ribeiro, A.; Fernandez-Quintanilla, C.; Lopez-Granados, F.; Brandstoetter, M.; Tomic, S.; Pedrazzi, S.; Peruzzi, A.; Pajares, G.; Kaplanis, G.; et al. Fleets of robots for environmentally-safe pest control in agriculture. Precis. Agric. 2016, 18, 574–614. [Google Scholar] [CrossRef]
- BlueWeave Consulting, Global Agricultural Robots Market to Surpass 81 Billion by 2028, at a CAGR of 9.9% during the Forecast Period. 2022. Available online: https://www.globenewswire.com/news-release/2022/03/21/2406862/0/en/Global-Agricultural-Robots-Market-to-Surpass-81-Billion-by-2028-at-a-CAGR-of-9-9-during-the-forecast-period-BlueWeave-Consulting.html (accessed on 22 April 2022).
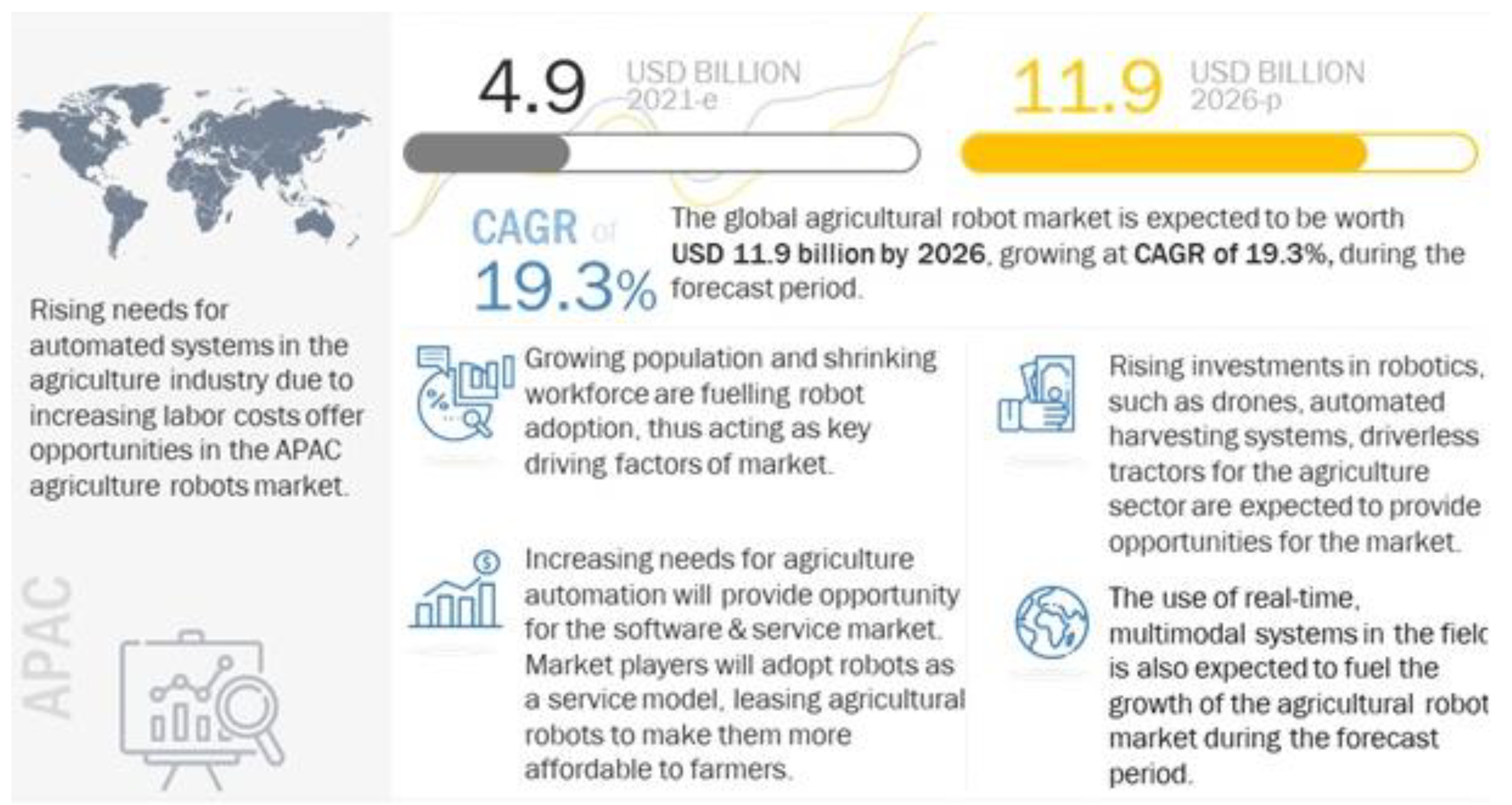
- Markets and Markets, Agricultural Robots Market by Type (Milking Robots, UAVs/Drones, Automated Harvesting Systems, Driverless Tractors), Farm Produce, Farming Environment (Indoor, Outdoor), Application, and Geography—Global Forecast to 2026. 2022. Available online: https://www.marketsandmarkets.com/Market-Reports/agricultural-robot-market-173601759.html (accessed on 22 April 2022).
- Caprari, G.; Colot, A.; Siegwart, R.; Halloy, J.; Deneubourg, J.-L. Animal and robot mixed societies—Building cooperation between microrobots and cockroaches. IEEE Robot. Autom. Mag. 2005, 12, 58–65. [Google Scholar] [CrossRef]
- Hansjörg Wyss Institute for Biologically Inspired Engineering, RoboBees: Autonomous Flying Microrobots. 2022. Available online: https://wyss.harvard.edu/technology/robobees-autonomous-flying-microrobots/ (accessed on 20 April 2022).
- University of Exeter, Biohybrid Microrobots inspired by Microbes. 2022. Available online: https://www.exeter.ac.uk/research/livingsystems/research/biohybrid-microrobots/ (accessed on 21 April 2022).
- Tan, Y.; Zheng, Z.-Y. Research Advance in Swarm Robotics. Def. Technol. 2013, 9, 18–39. [Google Scholar] [CrossRef] [Green Version]
- International Union for Conservation of Nature, Nearly One in 10 Wild Bee Species Face Extinction in Europe While the Status of More Than Half Remains unknown. 2015. Available online: https://www.iucn.org/content/nearly-one-10-wild-bee-species-face-extinction-europe-while-status-more-half-remains-unknown-iucn-report (accessed on 23 April 2022).
- Jefferson, N.; Raspe, P.; Tran, N. Agricultural Swarm Robotics with Distributed Sensing. Major Qualification Project for Bachelor Degree, Worcester Polytechnic Institute 2017. Available online: https://digital.wpi.edu/downloads/w3763840s (accessed on 21 April 2022).
- Schranz, M.; Umlauft, M.; Sende, M.; Elmenreich, W. Swarm Robotic Behaviors and Current Applications. Front. Robot. AI 2020, 7, 36. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elijah, O.; Rahman, T.A.; Orikumhi, I.; Leow, C.Y.; Hindia, M.N. An Overview of Internet of Things (IoT) and Data Analytics in Agriculture: Benefits and Challenges. IEEE Internet Things J. 2018, 5, 3758–3773. [Google Scholar] [CrossRef]
- Carbone, C.; Garibaldi, O.; Kurt, Z. Swarm Robotics as a Solution to Crops Inspection for Precision Agriculture. KnE Eng. 2018, 3, 552–562. [Google Scholar] [CrossRef] [Green Version]
- Arugga AI Farming. Robots Treating Every Plant. 2022. Available online: https://www.arugga.com/ (accessed on 20 April 2022).
- Cherney, M. Buzz Off, Bees. Pollination Robots Are Here. Wallstreet Journal, 2021. Available online: https://www.wsj.com/articles/buzz-off-bees-pollination-robots-are-here-11625673660(accessed on 20 April 2022).
- Boffey, D. Robotic Bees Could Pollinate Plants in Case of Insect Apocalypse. Guardian, 2018. [Google Scholar]
- US Environmental Protection Agency. Understanding How Pesticide Exposure Affects Honey Bee Colonies. 2018. Available online: https://www.epa.gov/sciencematters/understanding-how-pesticide-exposure-affects-honey-bee-colonies (accessed on 20 April 2022).
- Potts, S.G.; Neumann, P.; Vaissière, B.; Vereecken, N.J. Robotic bees for crop pollination: Why drones cannot replace biodiversity. Sci. Total Environ. 2018, 642, 665–667. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- University of Sussex. Goulson Lab: Are Robotic Bees the Future? 2022. Available online: http://www.sussex.ac.uk/lifesci/goulsonlab/blog/robotic-bees (accessed on 22 April 2022).
- Weiss, T. Skyx: Precise Agriculture Spraying by a Swarm of Drones. 2017. Available online: https://blog.startupnationcentral.org/agritech/skyx-agriculture-swarm-drones/ (accessed on 28 April 2022).
- Wang, S.; Li, X.; Zeng, A.; Song, J.; Xu, T.; Lv, X.; He, X. Effects of Adjuvants on Spraying Characteristics and Control Efficacy in Unmanned Aerial Application. Agriculture 2022, 12, 138. [Google Scholar] [CrossRef]
- Loukatos, D.; Templalexis, C.; Lentzou, D.; Xanthopoulos, G.; Arvanitis, K.G. Enhancing a flexible robotic spraying platform for distant plant inspection via high-quality thermal imagery data. Comput. Electron. Agric. 2021, 190, 106462. [Google Scholar] [CrossRef]
- Sammons, P.J.; Furukawa, T.; Bulgin, A. Autonomous pesticide spraying robot for use in a greenhouse, in Proceedings of the 2005 Australasian Conference on Robotics and Automation, ACRA 2005. Syndey, Australia, 5–7 December 2005; pp. 1–9. [Google Scholar]
- Jian-Sheng, P. An Intelligent Robot System for Spraying Pesticides. Open Appl. Inform. J. 2014, 8, 435–444. [Google Scholar] [CrossRef]
- European Commission. Agricultural-robotics technology company enabling a modular swarm of autonomous drones for spraying. 2022. Available online: https://cordis.europa.eu/project/id/836621 (accessed on 20 April 2022).
- Borrás, J. Swarm of Tiny Robots Could Help Eliminate Pesticides, eTransport News. 7 August 2020. Available online: https://etransportnews.com/2020/08/07/swarm-of-tiny-robots-could-help-eliminate-pesticides/ (accessed on 26 April 2022).
- Dorigo, M.; Theraulaz, G.; Trianni, V. Reflections on the future of swarm robotics. Sci. Robot. 2020, 5. [Google Scholar] [CrossRef]
- Harvard University, Better Bees: Progress Towards Robotic Pollinators. 2022. Available online: https://sitn.hms.harvard.edu/flash/2017/bees-better-progress-made-towards-robotic-pollinators/ (accessed on 21 April 2022).
- Carolan, M. Automated agrifood futures: Robotics, labor and the distributive politics of digital agriculture. J. Peasant Stud. 2019, 47, 184–207. [Google Scholar] [CrossRef]
- Labios, L. These New Soft Actuators Could Make Soft Robots Less Bulky; UC San Diego: La Jolla, CA, USA, 2019. [Google Scholar]
- Chen, H.-Y.; Diteesawat, R.S.; Haynes, A.; Partridge, A.J.; Simons, M.F.; Werner, E.; Garrad, M.; Rossiter, J.; Conn, A.T. RUBIC: An Untethered Soft Robot with Discrete Path Following. Front. Robot. AI 2019, 6, 52. [Google Scholar] [CrossRef] [Green Version]
- Melin, H.E. Analysis of the Climate Impact of Lithium-Ion Batteries and How to Measure It. Circular Energy Storage- Research and Consulting. 2019, pp. 1–17. Available online: https://www.transportenvironment.org/sites/te/files/publications/2019_11_Analysis_CO2_footprint_lithium-ion_batteries.pdf (accessed on 25 April 2022).
- Miletitch, R.; Dorigo, M.; Trianni, V. Balancing exploitation of renewable resources by a robot swarm. Swarm Intell. 2018, 12, 307–326. [Google Scholar] [CrossRef]
- Anderson, A.; Lindell, C.; Moxcey, K.; Siemer, W.; Linz, G.; Curtis, P.; Carroll, J.; Burrows, C.; Boulanger, J.; Steensma, K.; et al. Bird damage to select fruit crops: The cost of damage and the benefits of control in five states. Crop. Prot. 2013, 52, 103–109. [Google Scholar] [CrossRef] [Green Version]
- USDA’s Specialty Crop Research Initiative. The Economic Impact of Bird Damage to Select Fruit Crops in New York; USDA: Washington, DC, USA, 2014; pp. 1–7.
- USDA. Reducing Bird Damage to Agriculture Contact; USDA—National Wildlife Research Center: Washington, DC, USA, 2019; p. 1.
- Muller, B.; Clothier, R.; Watkins, S.; Fisher, A. Design of Bio-Inspired Autonomous Aircra for Bird Management Design of Bio-Inspired Autonomous Aircraft for Bird Management. In Proceedings of the AIAC16: 16th Australian International Aerospace Congress, Melbourne, Australia, 23–24 February 2015; pp. 23–24. [Google Scholar]
- Bird Gard. Australias #1 Selling Bird Deterrents & Pest Control Systems. 2022. Available online: https://www.birdgard.com.au/ (accessed on 20 April 2022).
- Mesquita, R.; Gaspar, P.D. A Novel Path Planning Optimization Algorithm Based on Particle Swarm Optimization for UAVs for Bird Monitoring and Repelling. Processes 2022, 10, 62. [Google Scholar] [CrossRef]
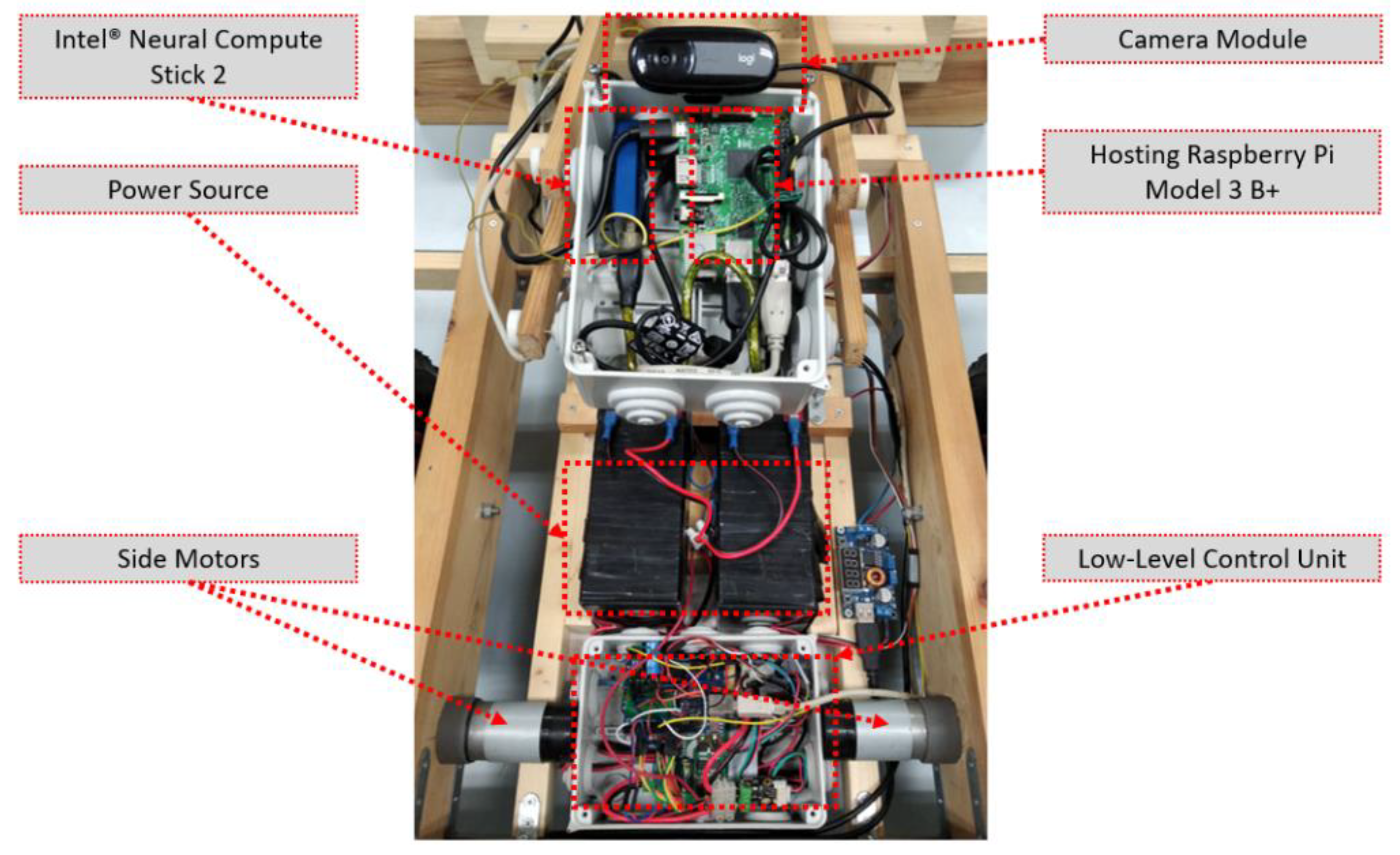
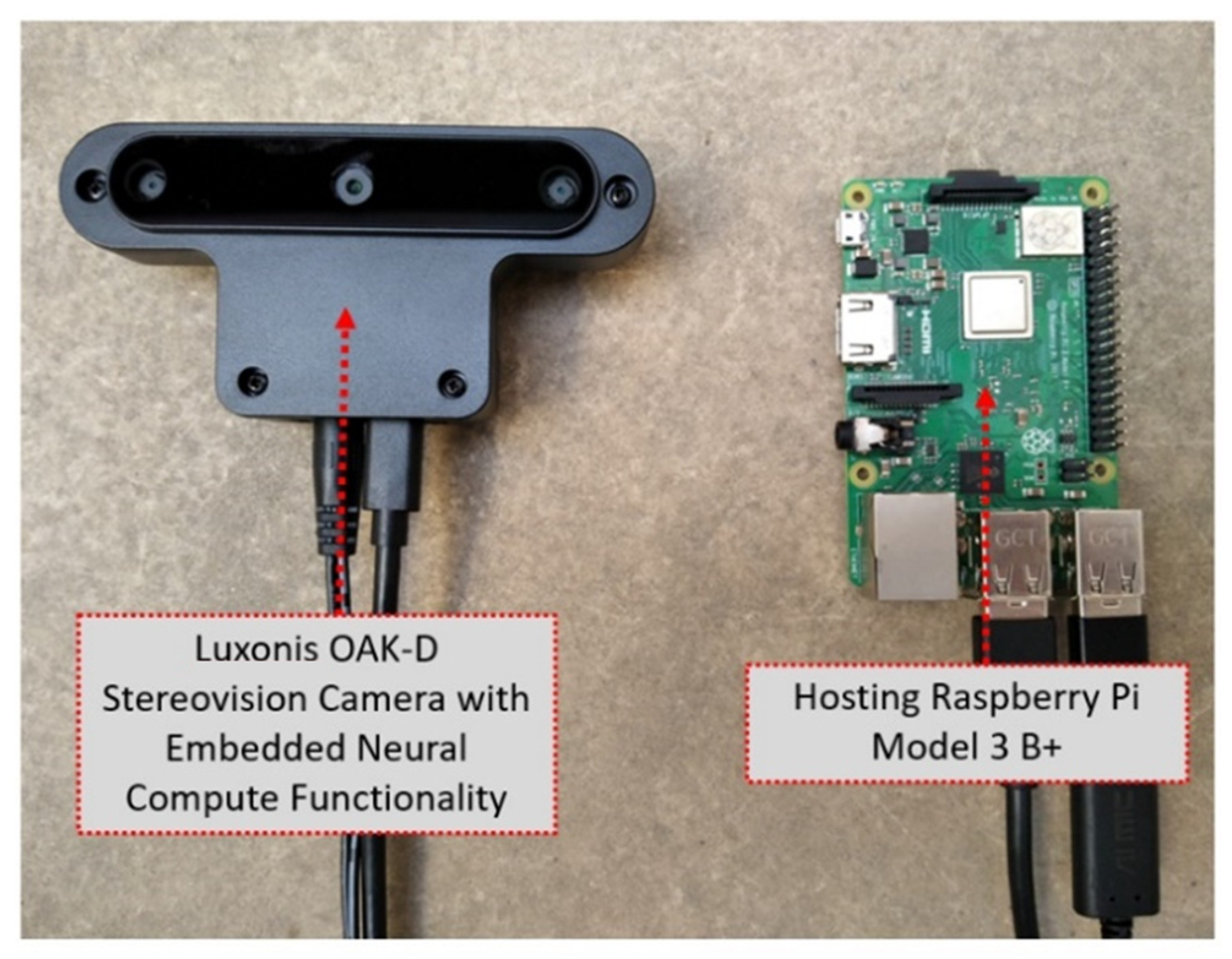
- Loukatos, D.; Petrongonas, E.; Manes, K.; Kyrtopoulos, I.-V.; Dimou, V.; Arvanitis, K.G. A Synergy of Innovative Technologies towards Implementing an Autonomous DIY Electric Vehicle for Harvester-Assisting Purposes. Machines 2021, 9, 82. [Google Scholar] [CrossRef]
- Boston Dynamics, Changing Your Idea of What Robots Can Do. 2022. Available online: https://www.bostondynamics.com/ (accessed on 20 April 2022).
- Nield, D. Video Shows Boston Dynamics’ Robot Dog Herding Sheep and Checking Crops, Science Alert. 2020. Available online: https://www.sciencealert.com/spot-the-robot-dog-is-now-herding-sheep-in-new-zealand (accessed on 20 April 2022).
- Hayward, A. Meet SwagBot, the Robot Cowboy That Can Herd and Monitor Cattle on Its Own, Smithsonian, modern farmer. 18 July 2016. Available online: https://modernfarmer.com/2016/07/swagbot/ (accessed on 20 April 2022).
- Kleen, A. Cattle-herding robot Swagbot makes debut on Australian farms. 2016. Available online: https://www.newscientist.com/article/2097004-cattle-herding-robot-swagbot-makes-debut-on-australian-farms/ (accessed on 20 April 2022).
- Fue, K.G.; Porter, W.M.; Barnes, E.M.; Rains, G.C. An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting. AgriEngineering 2020, 2, 150–174. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Huang, H.; Savkin, A.V.; Zhang, J. Robotic Herding of Farm Animals Using a Network of Barking Aerial Drones. Drones 2022, 6, 29. [Google Scholar] [CrossRef]
- Cong, P.; Cheng, Y. Advances in geopolymer materials: A comprehensive review. J. Traffic Transp. Eng. (Engl. Ed.) 2021, 8, 283–314. [Google Scholar] [CrossRef]
- Maraveas, C.; Bartzanas, T. Sensors for structural health monitoring of agricultural structures. Sensors 2021, 21, 314. [Google Scholar] [CrossRef]
- De Belie, N.; Sonck, B.; Braam, C.R.; Lenehan, J.J.; Svennerstedt, B.; Richardson, M. Durability of Building Materials and Components in the Agricultural Environment, Part II: Metal Structures. J. Agric. Eng. Res. 2000, 75, 333–347. [Google Scholar] [CrossRef]
- Baeza, E.J.; Van Breugel, A.J.B.; Hemming, S.; Stanghellini, C. Smart greenhouse covers: A look into the future. Acta Hortic. 2020, 213–224. [Google Scholar] [CrossRef]
- Ou, C.; Yang, J.; Du, Z.; Liu, Y.; Feng, Q.; Zhu, D. Long-Term Mapping of a Greenhouse in a Typical Protected Agricultural Region Using Landsat Imagery and the Google Earth Engine. Remote Sens. 2019, 12, 55. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Wang, H.; Miao, H.; Ye, B. The economic and social performance of integrated photovoltaic and agricultural greenhouses systems: Case study in China. Appl. Energy 2017, 190, 204–212. [Google Scholar] [CrossRef]
- Lazarus, B.S.; Velasco-Hogan, A.; Río, T.G.-D.; Meyers, M.A.; Jasiuk, I. A review of impact resistant biological and bioinspired materials and structures. J. Mater. Res. Technol. 2020, 9, 15705–15738. [Google Scholar] [CrossRef]
- Calvert, P.; Azhari, A. Biomimetic Materials: Properties and Processing. In Reference Module in Materials Science and Materials Engineering; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- McKenzie, R.M.; Barraclough, T.W.; Stokes, A.A. Integrating Soft Robotics with the Robot Operating System: A Hybrid Pick and Place Arm. Front. Robot. AI 2017, 4, 39. [Google Scholar] [CrossRef] [Green Version]
- Athanassopoulos, C.; Kohlman, A.; Henderson, M.; Kaul, J.; Boschuk, J. Permeability, puncture, and shear strength testing of composite liner systems under high normal loads. In Proceedings of the 2021 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Banff, AB, Canada, 1–4 November 2009; pp. 105–118. [Google Scholar]
- Vincent, J.F.V. Biomimetic Material. In Materials Experience; Butterworth-Heinemann: Oxford, UK, 2014. [Google Scholar]
- Kootstra, G.; Wang, X.; Blok, P.M.; Hemming, J.; Van Henten, E. Selective Harvesting Robotics: Current Research, Trends, and Future Directions. Curr. Robot. Rep. 2021, 2, 95–104. [Google Scholar] [CrossRef]
- Benson, T. Researchers have Developed a Durable Robot Bee. 2019. Available online: https://www.inverse.com/article/60697-robot-bee-black-mirror-research-disaster (accessed on 20 April 2022).
- Helmer, J. The Race to Build a Better Bee. JSTOR. 21 August 2018. Available online: https://daily.jstor.org/the-race-to-build-a-better-bee/ (accessed on 25 April 2022).
- Fundazioa, E. Precision Control of Movement in Robots. 2008. Available online: https://phys.org/news/2008-05-precision-movement-robots.html (accessed on 20 April 2022).
- Dobrzański, L.A.; Dobrzańska-Danikiewicz, A.D.; Gawel, T. Computer-aided design and selective laser melting of porous biomimetic materials. Adv. Mater. Process. Technol. 2016, 3, 70–82. [Google Scholar] [CrossRef]
- Hu, K.; Lin, K.; Gu, D.; Yang, J.; Wang, H.; Yuan, L. Mechanical properties and deformation behavior under compressive loading of selective laser melting processed bio-inspired sandwich structures. Mater. Sci. Eng. A 2019, 762, 138089. [Google Scholar] [CrossRef]
- Li, J.; Yu, X.; Martinez, E.E.; Zhu, J.; Wang, T.; Shi, S.; Guo, C. Emerging Biopolymer-Based Bioadhesives. Macromol. Biosci. 2022, 22, 2100340. [Google Scholar] [CrossRef]
- Bhattacharya, T.; Rather, G.; Akter, R.; Kabir, T.; Rauf, A.; Rahman, H. Nutraceuticals and Bio-inspired Materials from Microalgae and their Future Perspectives. Curr. Top. Med. Chem. 2021, 21, 1037–1051. [Google Scholar] [CrossRef]
- Mattocks, J.A.; Cotruvo, J.A. Biological, biomolecular, and bio-inspired strategies for detection, extraction, and separations of lanthanides and actinides. Chem. Soc. Rev. 2020, 49, 8315–8334. [Google Scholar] [CrossRef] [PubMed]
- Wei, X.; Huang, T.; Nie, J.; Yang, J.-H.; Qi, X.-D.; Zhou, Z.-W.; Wang, Y. Bio-inspired functionalization of microcrystalline cellulose aerogel with high adsorption performance toward dyes. Carbohydr. Polym. 2018, 198, 546–555. [Google Scholar] [CrossRef] [PubMed]
- Akinyemi, B.A.; Orogbade, B.O.; Ogheneyome, A.; Abeer, M.A.; Khan, A.; Mahmoud, A.H.; Asiri, A. Influence of alkali activators on thermo-physical properties of ecofriendly unfired clay bricks from anthill mounds. Eur. J. Environ. Civ. Eng. 2021, 1–13. [Google Scholar] [CrossRef]
- Prasad, R.; Ali, M.; Kwan, P.; Khan, H. Designing a multi-stage multivariate empirical mode decomposition coupled with ant colony optimization and random forest model to forecast monthly solar radiation. Appl. Energy 2018, 236, 778–792. [Google Scholar] [CrossRef]
- Huang, L.; Deng, L.; Li, A.; Gao, R.; Zhang, L.; Lei, W. Analytical model for solar radiation transmitting the curved transparent surface of solar greenhouse. J. Build. Eng. 2020, 32, 101785. [Google Scholar] [CrossRef]
- Li, B.; Shi, B.J.; Yao, Z.Z.; Shukla, M.K.; Du, T.S. Energy partitioning and microclimate of solar greenhouse under drip and furrow irrigation systems. Agric. Water Manag. 2020, 234, 106096. [Google Scholar] [CrossRef]
- Piromalis, D.; Arvanitis, K. SensoTube: A Scalable Hardware Design Architecture for Wireless Sensors and Actuators Networks Nodes in the Agricultural Domain. Sensors 2016, 16, 1227. [Google Scholar] [CrossRef] [Green Version]
- Singh, R.; Aernouts, M.; De Meyer, M.; Weyn, M.; Berkvens, R. Leveraging LoRaWAN Technology for Precision Agriculture in Greenhouses. Sensors 2020, 20, 1827. [Google Scholar] [CrossRef] [Green Version]
- Sofo, A.; Mininni, A.N.; Ricciuti, P. Soil Macrofauna: A key Factor for Increasing Soil Fertility and Promoting Sustainable Soil Use in Fruit Orchard Agrosystems. Agronomy 2020, 10, 456. [Google Scholar] [CrossRef] [Green Version]
- Papasolomontos, A.; Baudoin, W.; Lutaladio, N. Good Agricultural Practices for Greenhouse Vegetable Crops: Principles for Mediterranean Climate Areas; FAO: Rome, Italy, 2013. [Google Scholar]
- Oliveira, P.M.; Pires, E.S.; Boaventura-Cunha, J.; Pinho, T.M. Review of nature and biologically inspired metaheuristics for greenhouse environment control. Trans. Inst. Meas. Control 2020, 42, 2338–2358. [Google Scholar] [CrossRef]
- Colmenares-Quintero, R.F.; Góez-Sánchez, G.D.; Colmenares-Quintero, J.C.; Latorre-Noguera, L.F.; Kasperczyk, D. Application of a simulation tool based on a bio-inspired algorithm for optimisation of distributed power generation systems. Cogent Eng. 2021, 8, 1909791. [Google Scholar] [CrossRef]
- The Pennsylvania State University. Things a Greenhouse Grower Can Do to Improve Energy Efficiency; The Pennsylvania State University: State College, PA, USA, 2016. [Google Scholar]
- Trypanagnostopoulos, G.; Kavga, A.; Souliotis, M. Greenhouse performance results for roof installed photovoltaics. Renew. Energy 2017, 111, 724–731. [Google Scholar] [CrossRef]
- La Notte, L.; Giordano, L.; Calabrò, E.; Bedini, R.; Colla, G.; Puglisi, G.; Reale, A. Hybrid and organic photovoltaics for greenhouse applications. Appl. Energy 2020, 278, 115582. [Google Scholar] [CrossRef]
- Zisis, C.; Pechlivani, E.; Tsimikli, S.; Mekeridis, E.; Laskarakis, A.; Logothetidis, S. Organic Photovoltaics on Greenhouse Rooftops: Effects on Plant Growth. Mater. Today Proc. 2019, 19, 65–72. [Google Scholar] [CrossRef]
- Chaysaz, A.; Seyedi, S.R.M.; Motevali, A. Effects of different greenhouse coverings on energy parameters of a photovoltaic–thermal solar system. Sol. Energy 2019, 194, 519–529. [Google Scholar] [CrossRef]
- Huang, L.; Deng, L.; Li, A.; Gao, R.; Zhang, L.; Lei, W. A novel approach for solar greenhouse air temperature and heating load prediction based on Laplace transform. J. Build. Eng. 2021, 44, 102682. [Google Scholar] [CrossRef]
- Srinivasan, G.; Muthukumar, P. A review on solar greenhouse dryer: Design, thermal modelling, energy, economic and environmental aspects. Sol. Energy 2021, 229, 3–21. [Google Scholar] [CrossRef]
- Korecko, J.; Jirka, V.; Sourek, B.; Cerveny, J. Module greenhouse with high efficiency of transformation of solar energy, utilizing active and passive glass optical rasters. Sol. Energy 2010, 84, 1794–1808. [Google Scholar] [CrossRef]
- Wang, D.; Liu, H.; Li, Y.; Zhou, G.; Zhan, L.; Zhu, H.; Lu, X.; Chen, H.; Li, C.-Z. High-performance and eco-friendly semitransparent organic solar cells for greenhouse applications. Joule 2021, 5, 945–957. [Google Scholar] [CrossRef]
- Shankar, A.; Vijayakumar, K.; Babu, B.C. Energy saving potential through artificial lighting system in PV integrated smart buildings. J. Build. Eng. 2021, 43, 103080. [Google Scholar] [CrossRef]
- Capraro, F.; Patiño, D.; Tosetti, S.; Schugurensky, C. Neural network-based irrigation control for precision agriculture. In Proceedings of the 2008 IEEE International Conference on Networking, Sensing and Control, Sanya, China, 6–8 April 2008; pp. 357–362. [Google Scholar]
- Pérez-Alonso, J.; Pérez-García, M.; Pasamontes-Romera, M.; Callejón-Ferre, A.J. Performance analysis and neural modelling of a greenhouse integrated photovoltaic system. Renew. Sustain. Energy Rev. 2012, 16, 4675–4685. [Google Scholar] [CrossRef]
- Carballo, J.A.; Bonilla, J.; Roca, L.; Berenguel, M. New low-cost solar tracking system based on open source hardware for educational purposes. Sol. Energy 2018, 174, 826–836. [Google Scholar] [CrossRef]
- Qian, X.; Zhao, Y.; Alsaid, Y.; Wang, X.; Hua, M.; Galy, T.; Gopalakrishna, H.; Yang, Y.; Cui, J.; Liu, N.; et al. Artificial phototropism for omnidirectional tracking and harvesting of light. Nat. Nanotechnol. 2019, 14, 1048–1055. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.; Xu, Y.; Zhang, X.; Bisoyi, H.K.; Xue, P.; Yang, Y.; Yang, X.; Valenzuela, C.; Chen, Y.; Wang, L.; et al. Bioinspired Phototropic MXene-Reinforced Soft Tubular Actuators for Omnidirectional Light-Tracking and Adaptive Photovoltaics. Adv. Funct. Mater. 2022. [Google Scholar] [CrossRef]
- Syers, J.K. Efficiency of soil and fertilizer phosphorus use: Reconciling changing concepts of soil phosphorus behaviour with agronomic information. FAO Fertil. Plant Nutr. Bull. 2018, 18, 1–108. [Google Scholar]
- FAO. The Impact of Disasters and Crises on Agriculture and Food Security; FAO: Rome, Italy, 2017; pp. 1–168. [Google Scholar]
- OECD. Water and Agriculture; OECD: Paris, France, 2022. [Google Scholar]
- Bao, J.; Lu, W.-H.; Zhao, J.; Bi, X.T. Greenhouses for CO2 sequestration from atmosphere. Carbon Resour. Convers. 2018, 1, 183–190. [Google Scholar] [CrossRef]
- Singh, G.G.; Hilmi, N.; Bernhardt, J.R.; Montemayor, A.M.C.; Cashion, M.; Ota, Y.; Acar, S.; Brown, J.M.; Cottrell, R.; Djoundourian, S.; et al. Climate impacts on the ocean are making the Sustainable Development Goals a moving target travelling away from us. People Nat. 2019, 1, 317–330. [Google Scholar] [CrossRef]
- Adekalu, K.; Balogun, J.; Aluko, O.; Okunade, D.A.; Gowing, J.W.; Faborode, M. Runoff water harvesting for dry spell mitigation for cowpea in the savannah belt of Nigeria. Agric. Water Manag. 2009, 96, 1502–1508. [Google Scholar] [CrossRef]
- Freie Universität Berlin. Macrocatchment water Harvesting. 2022. Available online: https://www.geo.fu-berlin.de/en/v/iwrm/Implementation/technical_measures/Water-harvesting-techniques/macrocatchment_harvesting/index.html (accessed on 23 April 2022).
- Knapczyk-Korczak, J.; Stachewicz, U. Biomimicking spider webs for effective fog water harvesting with electrospun polymer fibers. Nanoscale 2021, 13, 16034–16051. [Google Scholar] [CrossRef]
- Warka Water. Warka Water: Every Drop Counts. Available online: https://www.warkawater.org/ (accessed on 23 April 2022).
- Lovechio, N. Warka Water Tower: How to Collect Water from the Atmosphere. Available online: https://buildingcue.it/warka-water-tower-how-to-collect-water-from-the-atmosphere/6097/ (accessed on 24 April 2022).
- Nørgaard, T.; Dacke, M. Fog-basking behaviour and water collection efficiency in Namib Desert Darkling beetles. Front. Zoöl. 2010, 7, 23. [Google Scholar] [CrossRef] [Green Version]
- Zhai, L.; Berg, M.C.; Cebeci, F.; Kim, Y.; Milwid, J.M.; Rubner, M.F.; Cohen, R.E. Patterned Superhydrophobic Surfaces: Toward a Synthetic Mimic of the Namib Desert Beetle. Nano Lett. 2006, 6, 1213–1217. [Google Scholar] [CrossRef] [PubMed]
- Fenyvesi, K.; Park, H.G.; Choi, T.; Song, K.; Ahn, S. Modelling Environmental Problem-Solving through STEAM Activities: 4D frames Warka Water Workshop. In Proceedings of the Bridges 2016: Mathematics, Music, Art, Architecture, Education, Culture, Bridges, Jyväskylä, Finland, 9–13 August 2016; pp. 601–608. [Google Scholar]
- Aslan, D.K.; Selçuk, S.A. A Biomimetic Approach to Rainwater Harvesting Strategies Through the Use of Buildings. Eurasian J. Civ. Eng. Archit. 2018, 2, 27S–39S. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soft Technology | Grasped Object | Object Size or Weight | Gripper Type | Gripper Size | Lifting Ratio | Controllability /Scalability | Response Time | Surface Condition |
|---|---|---|---|---|---|---|---|---|
| FEAs | Lettuce | 250 × 250 mm | Two pneumatic actuators and a blade | 8000 g, 450 × 450 × 300 mm | - | Close-loop with force sensor feedback/Yes | 31.7 s | - |
| Apple | - | Three soft finger design | Two fingers length: 95.25 mm One Finger length: 152.4 mm | - | Open-loop/- | 7.3 s | - | |
| Mushroom | - | Three soft chambers in circular shell | Chamber height: 20 mm Chamber arc angle: 60o | 30 | -/Yes | - | Any surface | |
| Apple, Tomato, Carrot, Strawberry | 69 mm, 5–150 g | Magnetorheological gripper | - | - | PID/- | 0.46 s | Any surface | |
| Cupcake liners filled with peanuts | 34–64 g | Three soft finger design | Finger size: 82 × 16 × 15 mm | - | FE Analysis/Yes | - | - | |
| Cupcake liners filled with red beans, higiki, ohitashi | 75.2 g | Soft fingers | Finger length: 97 mm | 1805% | Open-Loop/Yes | 10 s pick and place (total procedure) | - | |
| Defrosted broccoli | 33.54 × 23.94 mm, 3.8–7.0 g | Two soft fingers | Actuator size: 50 × 20 mm | - | -/- | 3 s for inflation | - | |
| Granular kernel corn, Chopped green onion, Boiled hijiki | 0.77–26.6 g | Four soft fingers | Finger size: 43 × 61.5 mm | - | Open-Loop/Yes | - | Any surface | |
| Orange | 1000 g | Soft fingers | Finger size: 95 × 20 × 18 mm | - | Open-Loop/Yes | - | Any surface | |
| Tomato, Kiwifruit, Strawberry | 45–76 mm | Four soft chambers in circular shell | Internal diameter: 46 mm Height: 30 mm | - | Open-Loop/Yes | 2–5 s | Any surface | |
| Tendon-driven | Tomato | 500 g | Three soft finger design | - | - | Preprogrammed rotation of motors /Yes | - | - |
| Tomato, Cucumber (slices) Avocado (Strips) Cherry Tomato, Olives, Pineapples cubes, Broccoli | - | Quad-Spatula design | - | - | -/Yes | - | Flat surfaces | |
| FEA-Tendon-driven | Banana, Apple, Grapes | 2700 g | Three soft finger design with a suction cup | 389.69 g | 7.06 | Teleoperation Control/Yes | 0.094 s (Rise time) | Any surface |
| Topology optimized soft actuators | Apple, Grapefruit, Guava, Orange, Kiwifruit | 1499 g | Two compliant fingers | - | - | Open-loop (Arduino)/Yes | - | - |
| Cultivar | Harvest Method | Key Observations |
|---|---|---|
| Blueberry | Commercial mechanical harvester | Three out of four mechanically harvested blueberries were severely bruised and damaged by the commercial mechanical harvester. |
| Handpicking | Nearly one in four hand-harvested blueberries had noticeable bruise damage. | |
| Apple | Shake-and-catch harvesting system | At least eight percent of the three cultivars led to fruit bruises. |
| Robotic picking using a three-finger gripper | If the robotic finger gripper’s grasping pressure and force are properly programmed, the risk of mechanical damage is reduced. Significant bruising of apples (46–60% of the harvest) was observed at higher grasping forces (14.5 to 15.9 N) 46.7% and grasping pressure (0.28 and 0.29 MPa). Based on the data, proper adjustment of the pressure and force is essential to minimize fruit damage. | |
| Handpicking | The risk of severe bruise damage on plants was mitigated if the average grasping force (5.05 N) and grasping pressure (0.24 MPa) were maintained at 5 N and 0.24 MPa. However, it is challenging for human hands to exert constant pressure and force during the entire harvesting process; bruise damage is unavoidable in handpicking fruits and vegetables. | |
| Table olive | Manual picking | Manual picking by hand was responsible for 17.5–51% of the severe bruise damage. |
| Trunk shaking harvester | There was a 62–77% % risk of damage if the farmers used mechanical trunk shakers. | |
| Grape straddle harvester | The risk of bruising damage was the highest, at between 91% and 100%. | |
| Prune | Straddle mechanical harvester | Less than 10% of the prunes harvested using mechanical techniques showed signs of bruise damage. |
| Handpicking | ∼50% bruise damage | |
| Plum | Straddle mechanical harvester | ∼18% of the plums showed some bruise damage. |
| Environment | Project/Product Name | Basic Swarm Behaviors | Availability |
|---|---|---|---|
| Aerial | Distributed Flight Array | Self-assembly, coordinated motion | n.a. |
| Crazyflie 2.1 | Aggregation, collective exploration, coordinated motion, collective localization, collective perception | Open-source, commercial | |
| Finken-III | n.a. | ||
| Aquatic | CoCoRo | Aggregation, collective exploration, collective localization, task allocation | n.a |
| Monsun | |||
| CORATAM | Open-source | ||
| Outer Space | Swarmers | Collective exploration, collective localization | n.a |
| Marsbee | Collective exploration, coordinated motion, task allocation |
| Crop | Yield per Acre | Annual Bird Management Costs | Current | Percent Lost to Bird Damage | |
|---|---|---|---|---|---|
| No Management (Low Estimate) | No Management (High Estimate) | ||||
| Wine Grapes | 5.11 | $1570 | 6% | 36% | 39% |
| Blueberries | 5191 | $404 | 12% | 52% | 54% |
| Tart Cherries | 7260 | $510 | 9% | 43% | 47% |
| Sweet Cherries | 3.40 | $692 | 31% | 60% | 67% |
| HC Apples | 679 | $249 | 5% | 13% | 15% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kondoyanni, M.; Loukatos, D.; Maraveas, C.; Drosos, C.; Arvanitis, K.G. Bio-Inspired Robots and Structures toward Fostering the Modernization of Agriculture. Biomimetics 2022, 7, 69. https://doi.org/10.3390/biomimetics7020069
Kondoyanni M, Loukatos D, Maraveas C, Drosos C, Arvanitis KG. Bio-Inspired Robots and Structures toward Fostering the Modernization of Agriculture. Biomimetics. 2022; 7(2):69. https://doi.org/10.3390/biomimetics7020069
Chicago/Turabian StyleKondoyanni, Maria, Dimitrios Loukatos, Chrysanthos Maraveas, Christos Drosos, and Konstantinos G. Arvanitis. 2022. "Bio-Inspired Robots and Structures toward Fostering the Modernization of Agriculture" Biomimetics 7, no. 2: 69. https://doi.org/10.3390/biomimetics7020069
APA StyleKondoyanni, M., Loukatos, D., Maraveas, C., Drosos, C., & Arvanitis, K. G. (2022). Bio-Inspired Robots and Structures toward Fostering the Modernization of Agriculture. Biomimetics, 7(2), 69. https://doi.org/10.3390/biomimetics7020069