In this section, the proposed SFO is applied to three classical engineering design problems to evaluate its optimization performance in practical scenarios. These problems include the pressure vessel design problem (PVD) [
36], the speed reducer design problem [
37], and the gear train design problem [
38], which are widely recognized benchmarks in the field of structural and mechanical optimization. These design problems are characterized by nonlinear, constrained, and multi-variable objective functions, making them suitable for testing the global search capabilities and convergence robustness of metaheuristic algorithms. For each case, the mathematical formulation, design constraints, and variable bounds are retained in accordance with the respective literature to ensure comparability of results. The effectiveness of SFO in solving these problems is assessed based on solution quality, convergence speed, and constraint-handling performance, and is compared with existing optimization approaches.
4.1. Pressure Vessel Design Problem
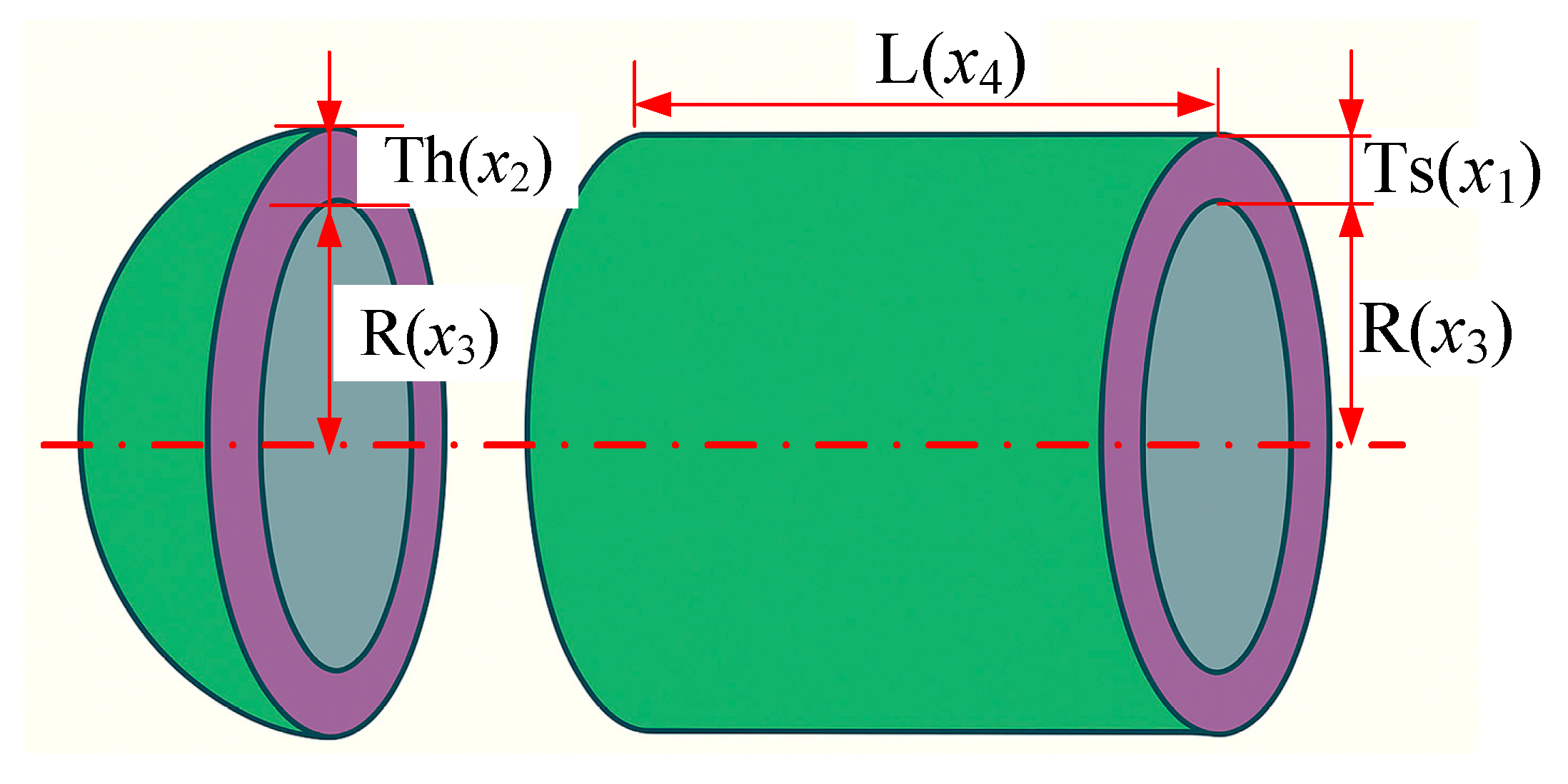
The pressure vessel design problem is a widely cited benchmark in structural engineering optimization. The design consists of a cylindrical vessel capped with two hemispherical heads. The primary objective is to minimize the total fabrication cost, which comprises the material cost, forming cost, and welding cost. To achieve this, the design must determine four key variables: the thickness of the shell and head (denoted as Ts = x
1 and Th = x
2, respectively), the inner radius of the vessel (R = x
3), and the length of the cylindrical section excluding the head (L = x
4), as illustrated in
Figure 6.
The mathematical formulation of the optimization problem is as follows:
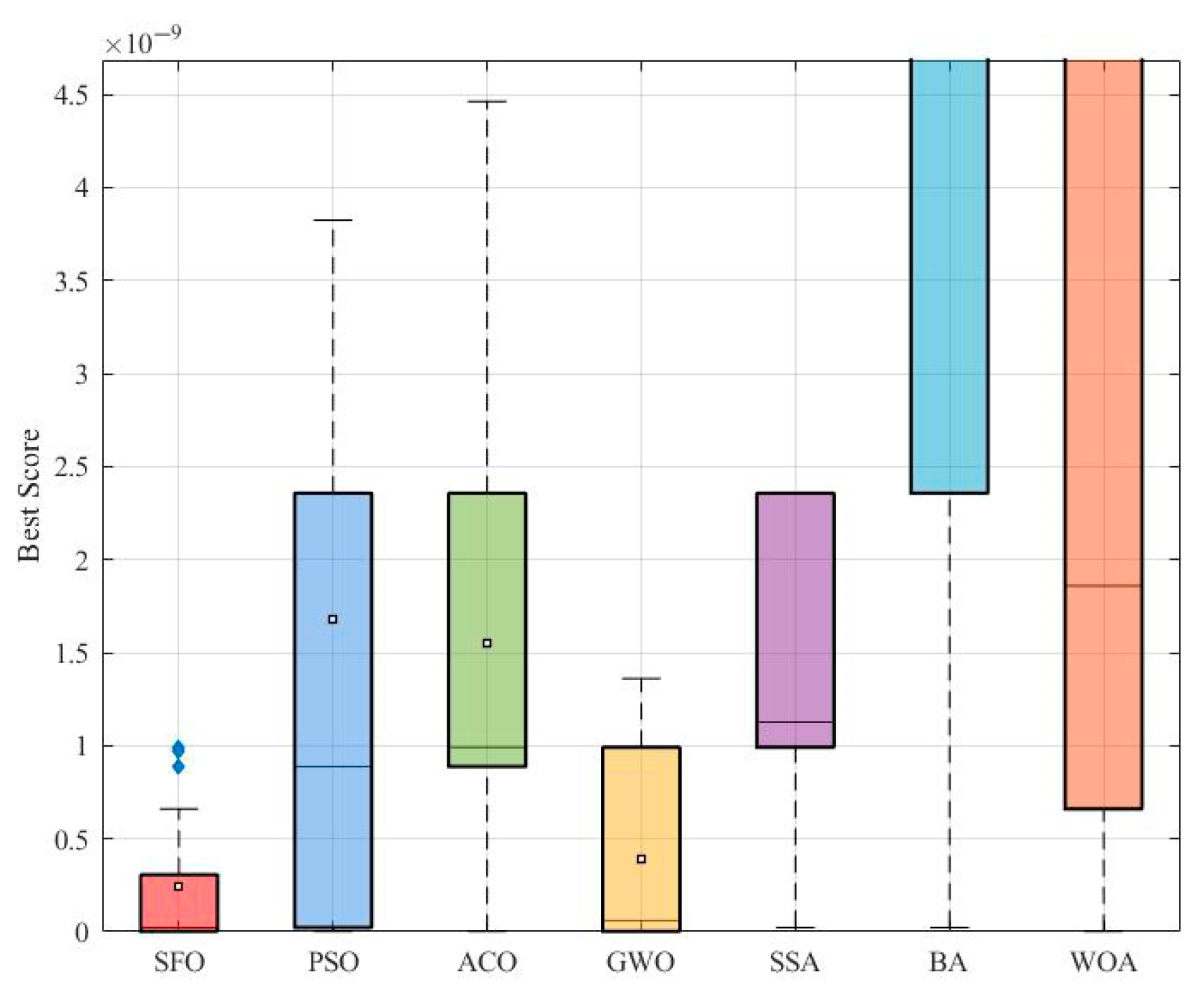
To evaluate the performance of the proposed SFO on engineering design tasks, a benchmark test was conducted on the pressure vessel design problem. Seven algorithms, including SFO, PSO, ACO, GWO, SSA, BA, and WOA, were tested independently over 50 runs.
Figure 7 shows the boxplot of the best fitness values achieved by each algorithm. While SFO displays a relatively concentrated distribution with few outliers, it is slightly outperformed by GWO and PSO in terms of median and overall spread. Notably, GWO achieves the smallest variation, indicating highly stable performance, whereas BA and WOA exhibit much larger dispersion.
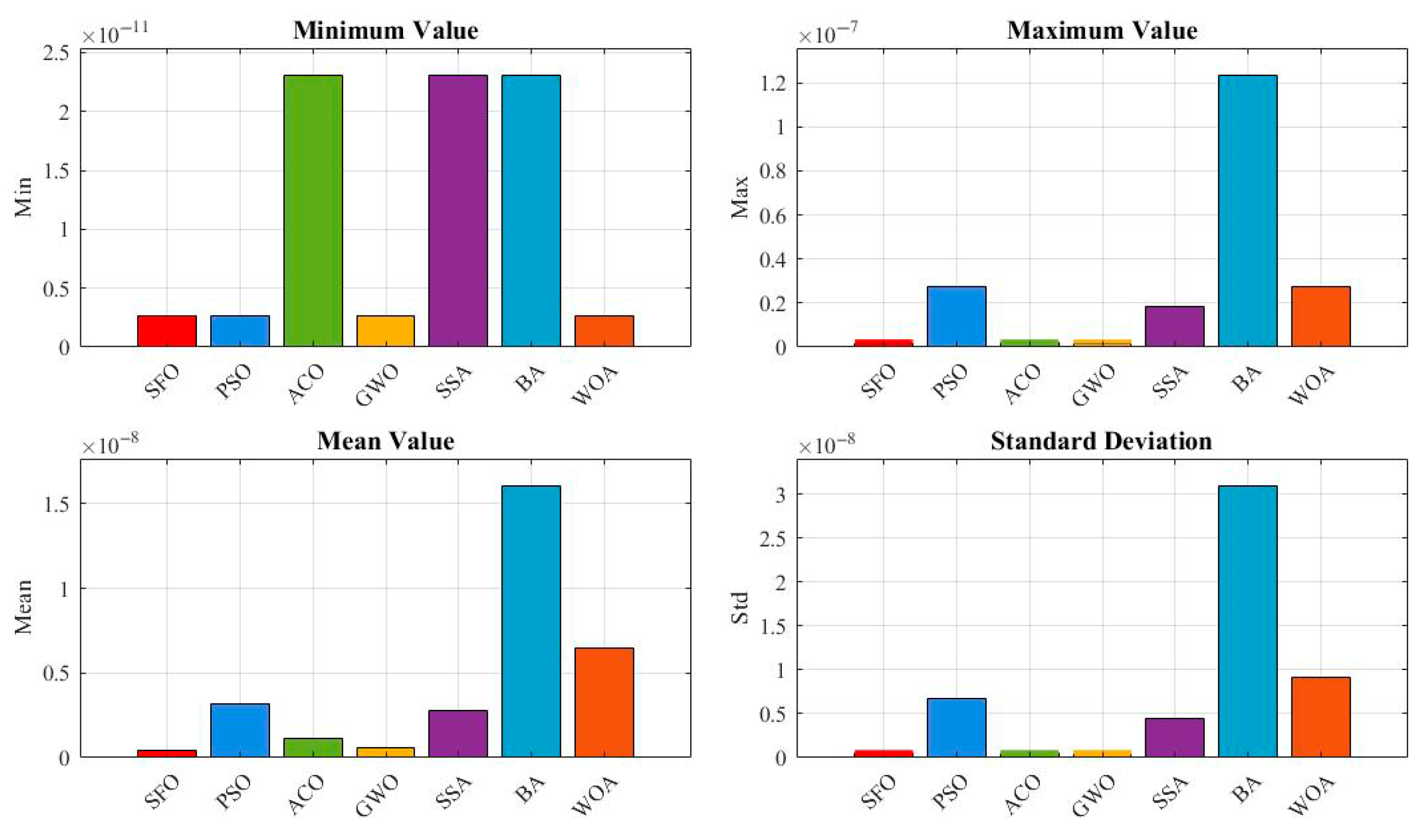
Figure 8 provides a breakdown of four statistical metrics: minimum, maximum, mean, and standard deviation. SFO achieves competitive results, with moderate mean and variance values, but trails behind GWO and PSO, both of which demonstrate lower mean and standard deviation, suggesting better convergence precision and consistency.
Table 5 lists the best solutions found by each algorithm. SFO’s best-found solution yields a relatively low objective value, though not the lowest. PSO obtains a slightly better optimum value, while ACO and WOA show significantly higher costs.
Table 6 summarizes the statistical indicators and includes the Friedman ranking and Wilcoxon signed-rank test. SFO ranks third overall (F-Rank = 3), following GWO (Rank 1) and PSO (Rank 2). According to the Wilcoxon test, SFO is statistically superior to several weaker algorithms (e.g., ACO, BA, WOA), but not significantly better than GWO and PSO (
p > 0.05 in these cases).
In summary, although SFO does not outperform all competitors on this specific problem, it achieves stable and competitive performance and remains statistically better than several mainstream algorithms. This suggests that SFO is a reliable optimization approach, though further tuning or hybridization may be needed for pressure vessel design task with strong structural constraints.
4.2. Speed Reducer Design
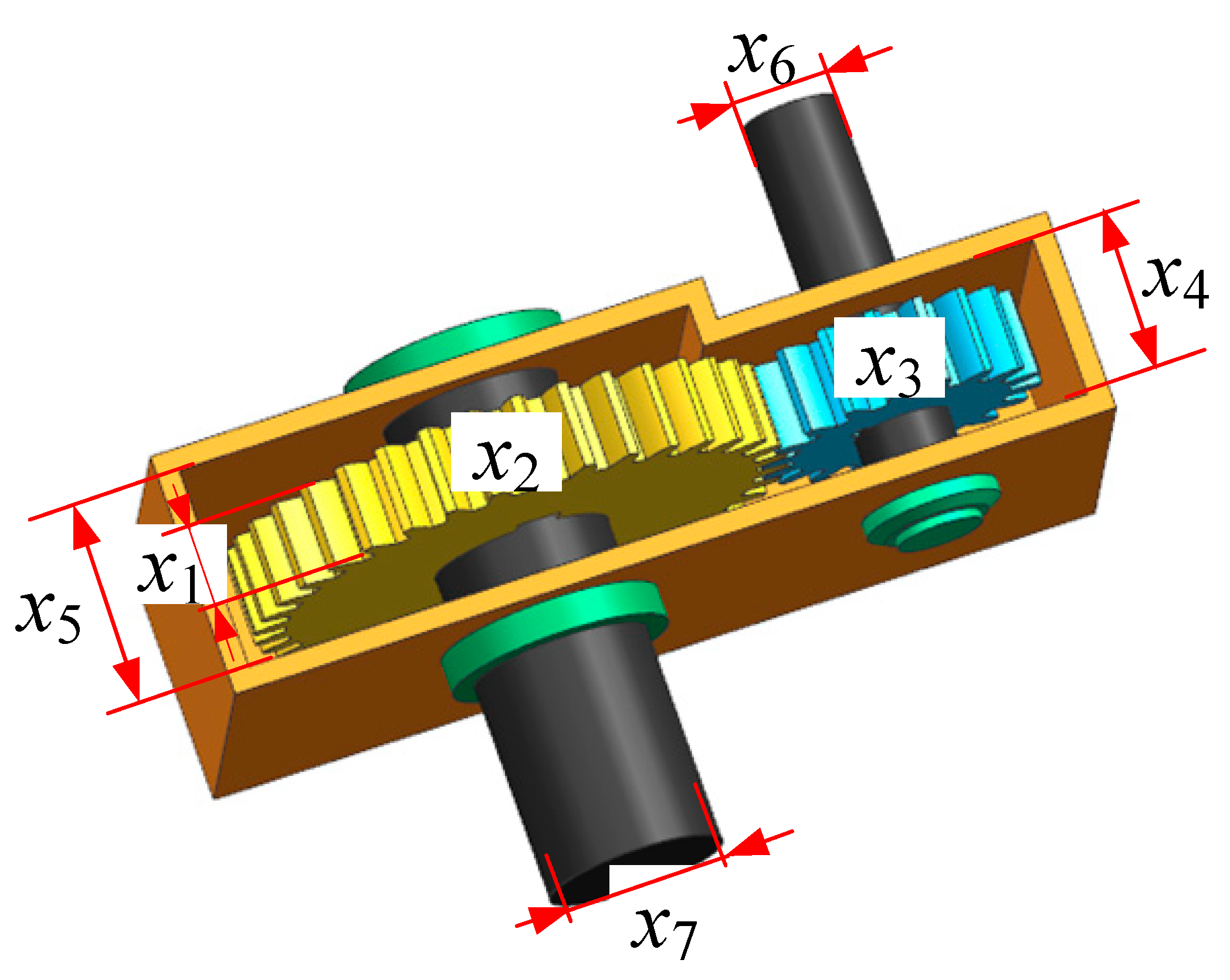
The speed reducer design problem is a classical constrained engineering optimization problem. The objective of this problem is to minimize the total weight of the speed reducer. As illustrated in
Figure 9, the speed reducer consists of two independent shafts equipped with gears, which are sequentially connected to the main shaft via bearings. The optimization problem involves seven design variables and eleven inequality constraints. The decision variables include the following: face width (x
1), module of the teeth (x
2), number of teeth on the pinion (x
3), length of the first shaft between bearings (x
4), length of the second shaft between bearings (x
5), diameter of the first shaft (x
6), and diameter of the second shaft (x
7).
The detailed mathematical formulation is provided below:
consider:
To evaluate the performance of the proposed SFO, we applied it to the classic speed reducer design problem and compared it with six widely used metaheuristic algorithms: PSO, ACO, GWO, SSA, BA, and WOA. The comparative analysis was conducted from multiple perspectives, including solution distribution, statistical indicators, and significance tests.
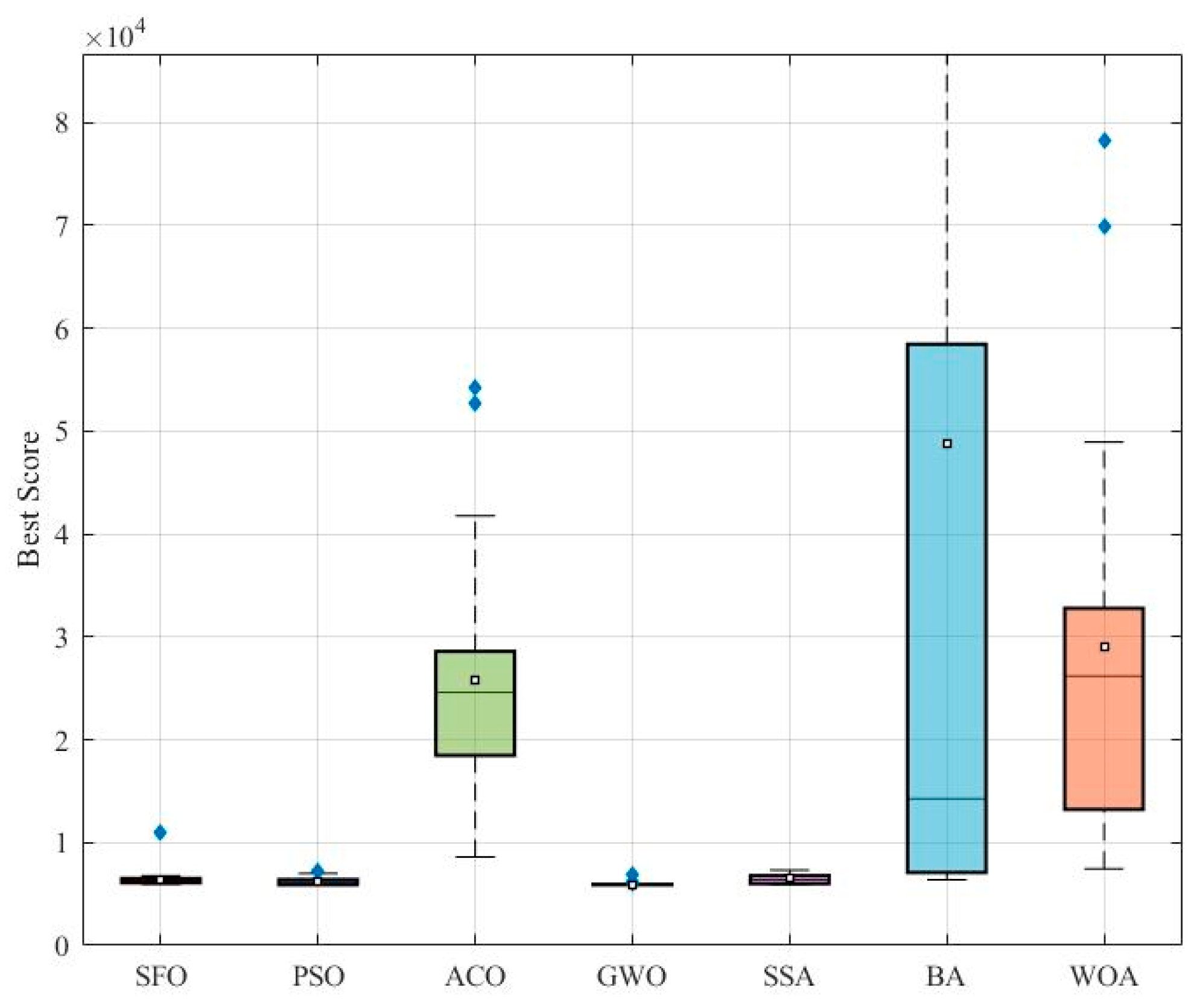
Figure 10 presents a boxplot of the best objective values obtained by each algorithm over 50 independent runs. It can be observed that SSA achieves the lowest median and overall tighter spread, indicating its superior consistency and performance. The SFO algorithm shows a relatively narrow interquartile range and low median value, reflecting stable performance and outperforming PSO, ACO, GWO, BA, and WOA.
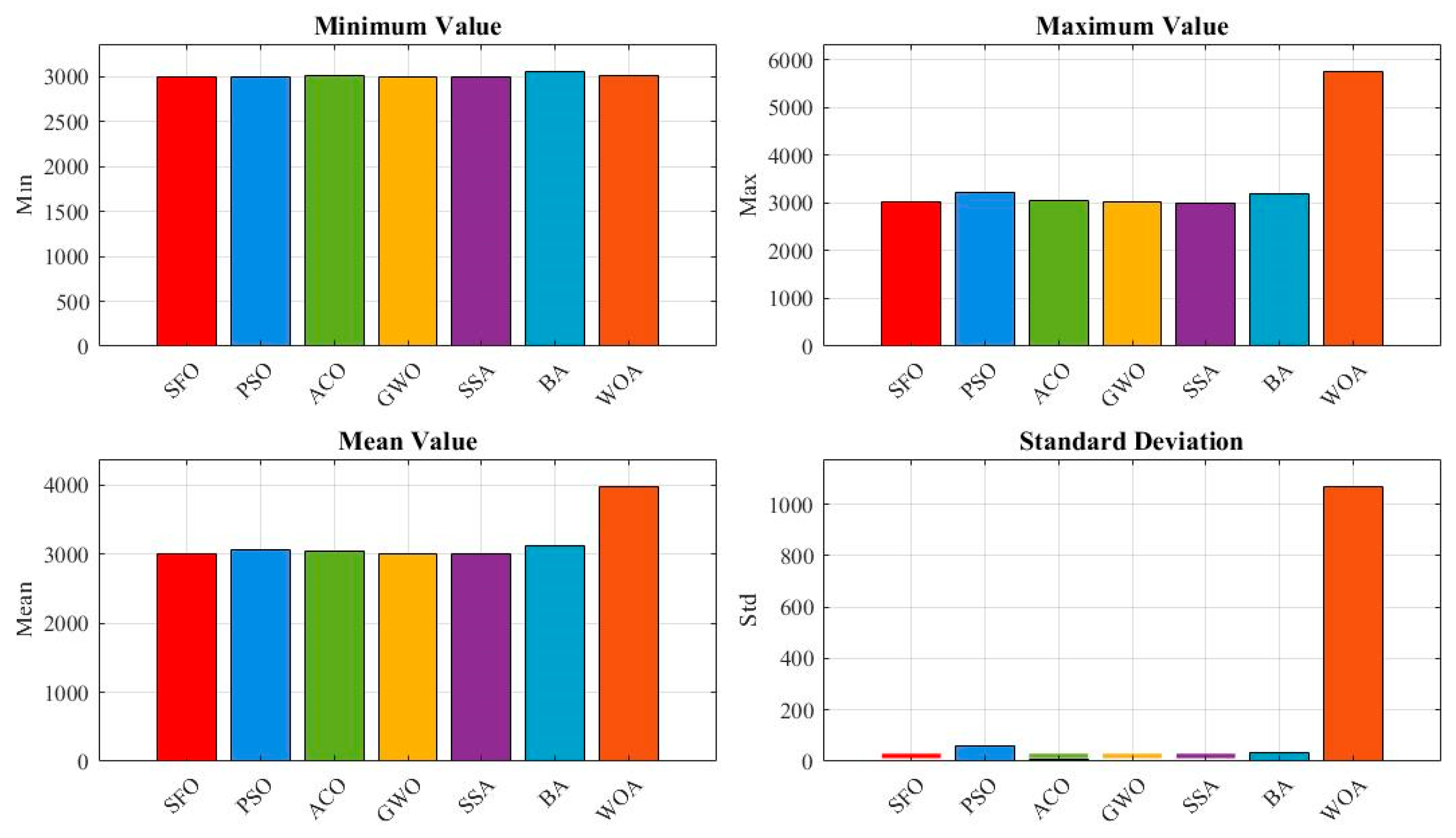
Figure 11 provides a bar chart comparison of four statistical indicators: minimum, maximum, mean, and standard deviation. SFO ranks second in minimum and mean values, slightly behind SSA, which achieves the best scores across all metrics. The standard deviation of SFO is notably lower than that of most compared algorithms, demonstrating robust convergence.
Table 7 lists the best design variables and corresponding objective values found by each algorithm. The best solution obtained by SFO is f(x) = 3006.9523, which is only slightly higher than SSA’s f(x) = 2994.4711, reinforcing the conclusion that SFO is a strong competitor but marginally outperformed by SSA. Nonetheless, SFO yields better solutions than PSO, ACO, GWO, BA, and WOA in this context.
Table 8 presents the statistical comparison results, including Min, Max, Mean, Std, Friedman ranking (F-Rank), Wilcoxon test outcomes, and corresponding
p-values. SFO obtains a Friedman Rank of 2, second only to SSA, which ranks first. The Wilcoxon test confirms that the performance difference between SFO and the weaker algorithms (e.g., WOA, BA, and ACO) is statistically significant at the 0.05 level. Although SSA surpasses SFO in terms of optimality, the performance of SFO is statistically superior to most other algorithms.
Overall, SFO demonstrates strong optimization capabilities on the speed reducer design problem. While SSA exhibits the best overall performance, SFO consistently outperforms PSO, ACO, GWO, BA, and WOA across most metrics, showing its effectiveness and stability.
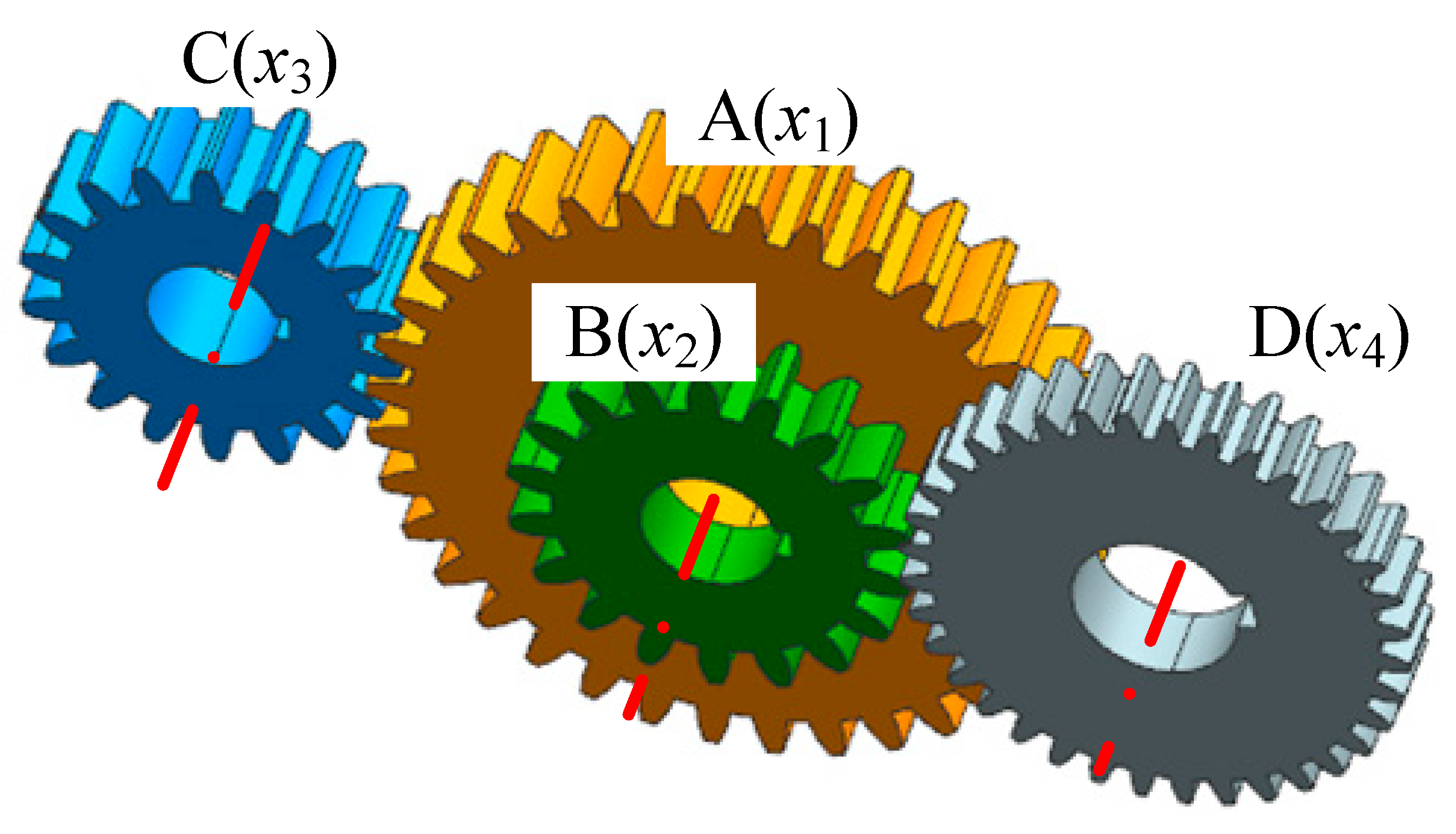
4.3. Gear Train Design Problem
The gear train design problem is a typical unconstrained discrete integer optimization problem in mechanical engineering. The objective is to minimize the gear ratio error between the input and output shafts. The gear ratio is defined as the ratio of the angular velocity of the output shaft to that of the input shaft. Let the number of teeth on gears A, B, C, and D be denoted as
x1,
x2,
x3, and
x4, respectively, as shown in
Figure 12.
The mathematical model of the optimization problem is formulated as follows:
consider:
Subject to:
To further evaluate the effectiveness of the proposed SFO, this section investigates its performance on the gear train design problem, a discrete, integer, and nonlinear optimization task in mechanical systems. The goal is to minimize the deviation from a target gear ratio. SFO is compared with six established metaheuristic algorithms: PSO, ACO, GWO, SSA, BA, and WOA.
As shown in
Figure 13, the boxplot reveals the distribution of the best objective values over 50 independent runs. The SFO algorithm clearly outperforms all other algorithms, achieving the lowest median value and the narrowest spread. In contrast, algorithms such as BA and WOA exhibit much higher variability and worse overall solution quality, with significant outliers. This indicates that SFO not only finds better solutions but also maintains high stability and robustness.
Figure 14 provides a quantitative comparison in terms of minimum, maximum, mean, and standard deviation values. SFO achieves the lowest mean and standard deviation, highlighting its consistent convergence toward the global optimum. Notably, although all algorithms reach a best fitness of 0 (as shown in
Table 7), the statistical indicators in this figure show that only SFO consistently converges to zero with minimal variance, while other algorithms exhibit higher average errors and wider dispersions.
Table 9 lists the best gear tooth combinations and corresponding objective values for each algorithm. All algorithms achieve an objective value of 0 at least once, demonstrating the solvability of the problem. However, the gear combinations identified by SFO—(53,30,13,51)—represent one of the ideal configurations that precisely meet the desired gear ratio. The robustness of SFO in repeatedly finding such solutions is further confirmed by the statistical results in
Table 8.
Table 10 presents the statistical analysis of algorithm performance, including minimum, maximum, mean, standard deviation, Friedman ranking (F-Rank), Wilcoxon signed-rank test, and
p-values. SFO ranks first (F-Rank = 1), with a mean value of 4.491 × 10
−10 and the smallest standard deviation of 4.848 × 10
−10. The Wilcoxon test confirms that the performance of SFO is statistically superior to all other competitors at the 0.05 significance level. These results strongly support the effectiveness and reliability of SFO for discrete, nonlinear problems such as gear train design.
Across the three engineering design problems investigated—pressure vessel design, speed reducer design, and gear train design—the proposed SFO consistently demonstrates competitive optimization performance. Although SFO is slightly outperformed by GWO and PSO in the pressure vessel case, it achieves stable convergence and ranks among the top three algorithms. In the speed reducer problem, SFO exhibits superior performance over five of the six compared algorithms, trailing only SSA by a narrow margin. Most notably, in the gear train design problem, SFO ranks first in all statistical indicators, clearly outperforming all competitors in both accuracy and robustness. These results collectively highlight the generalizability, reliability, and strong optimization capability of SFO across a diverse set of engineering scenarios, including both continuous and discrete design domains.
These engineering cases, together with the preceding CEC2022 benchmark tests, demonstrate that SFO is not limited to specific types of problems but exhibits strong versatility across diverse optimization scenarios. It performs reliably on both numerical and real-world design problems, including continuous and discrete domains, unimodal and multimodal landscapes, and problems with complex structural constraints. While no algorithm can guarantee superiority in all possible cases—as asserted by the No-Free-Lunch (NFL) theorem—the experimental results confirm that SFO is a robust and competitive alternative for solving complex engineering and computational optimization tasks.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}