
Adaptive Neural Network Robust Control of FOG with Output Constraints


Abstract
1. Introduction
2. Control System Model of FOG
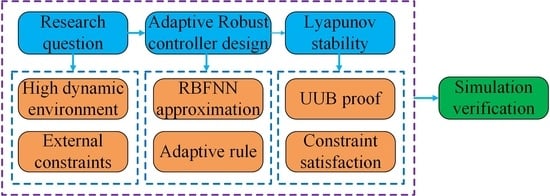
Design of the RBFNN Controller
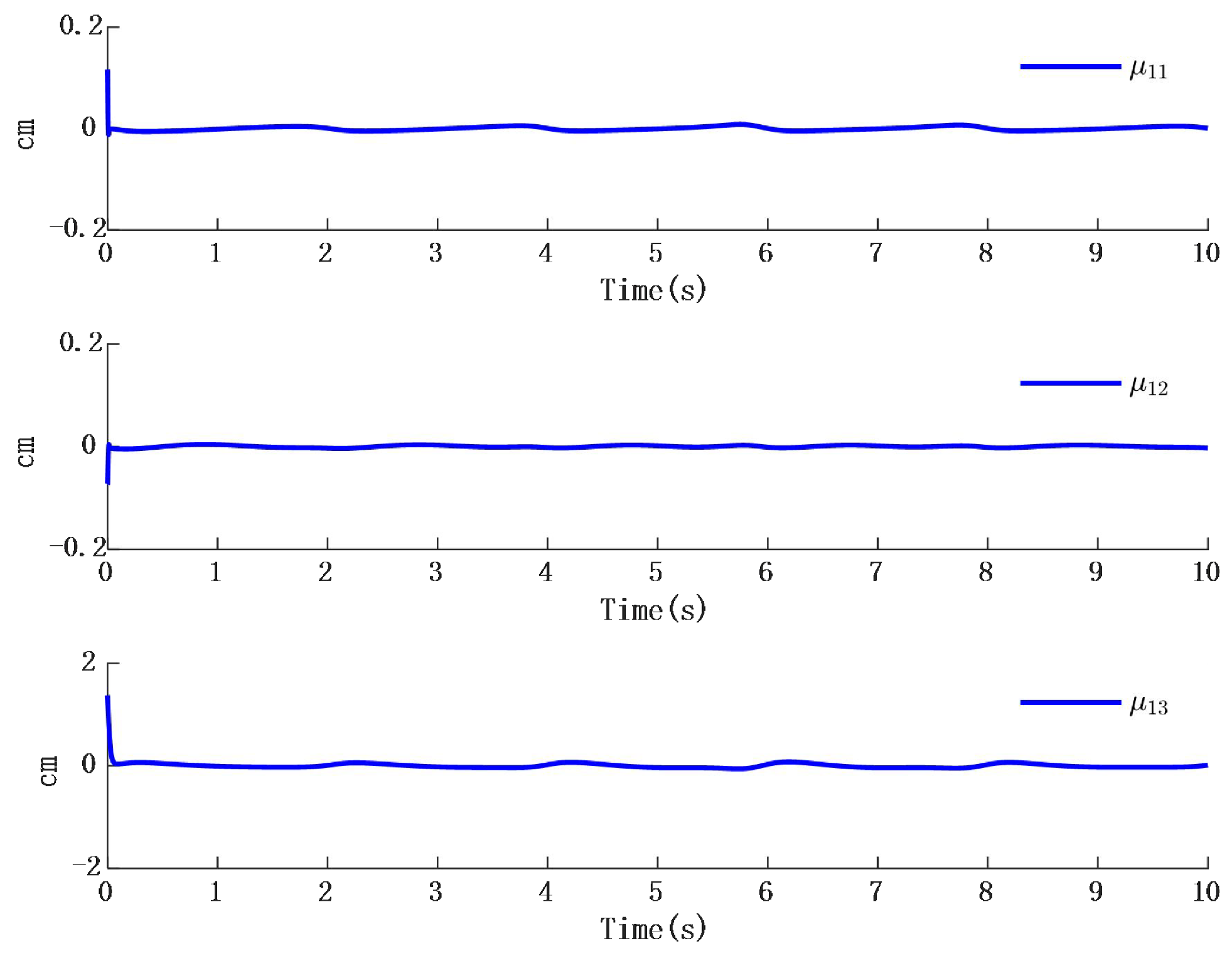
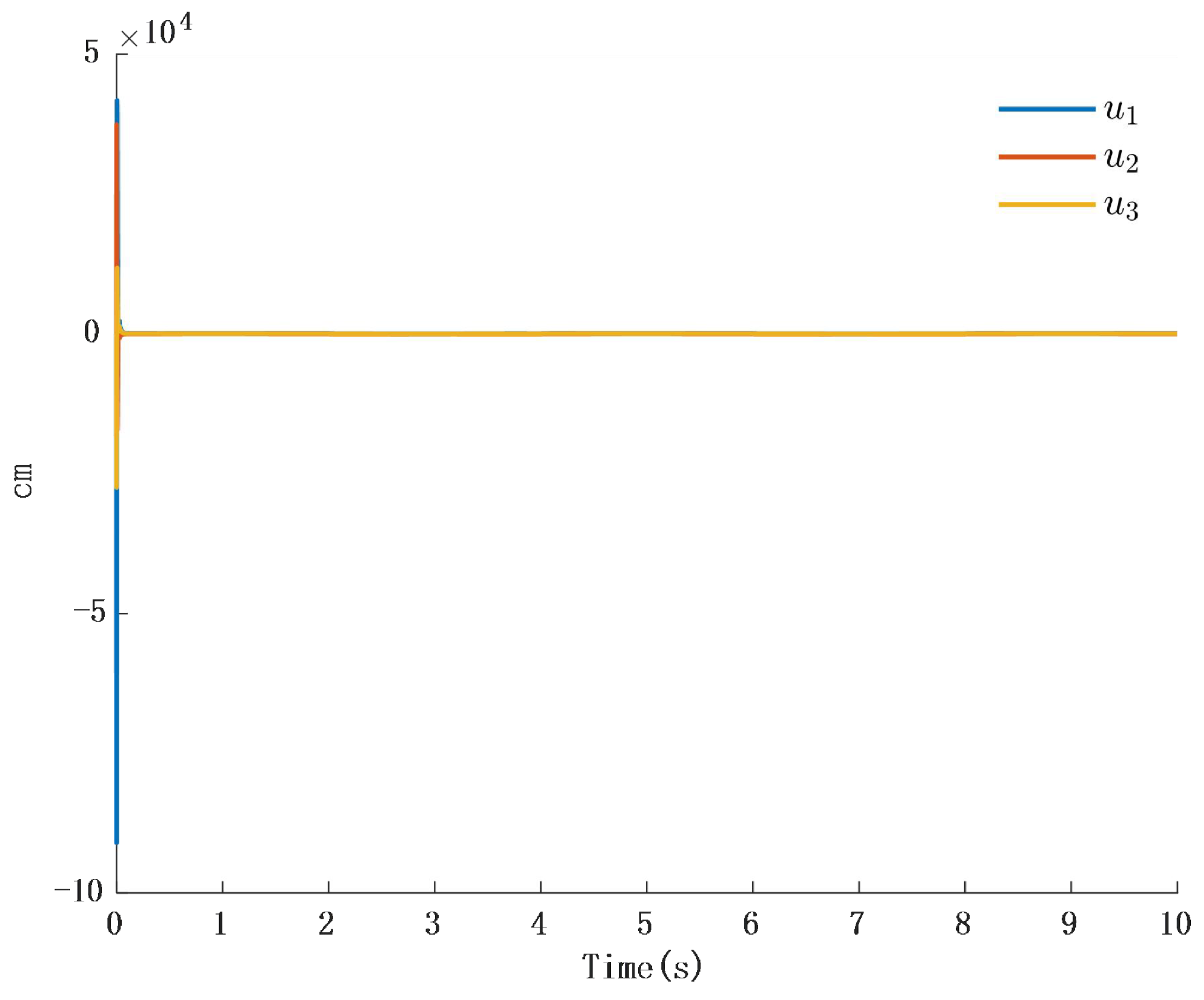
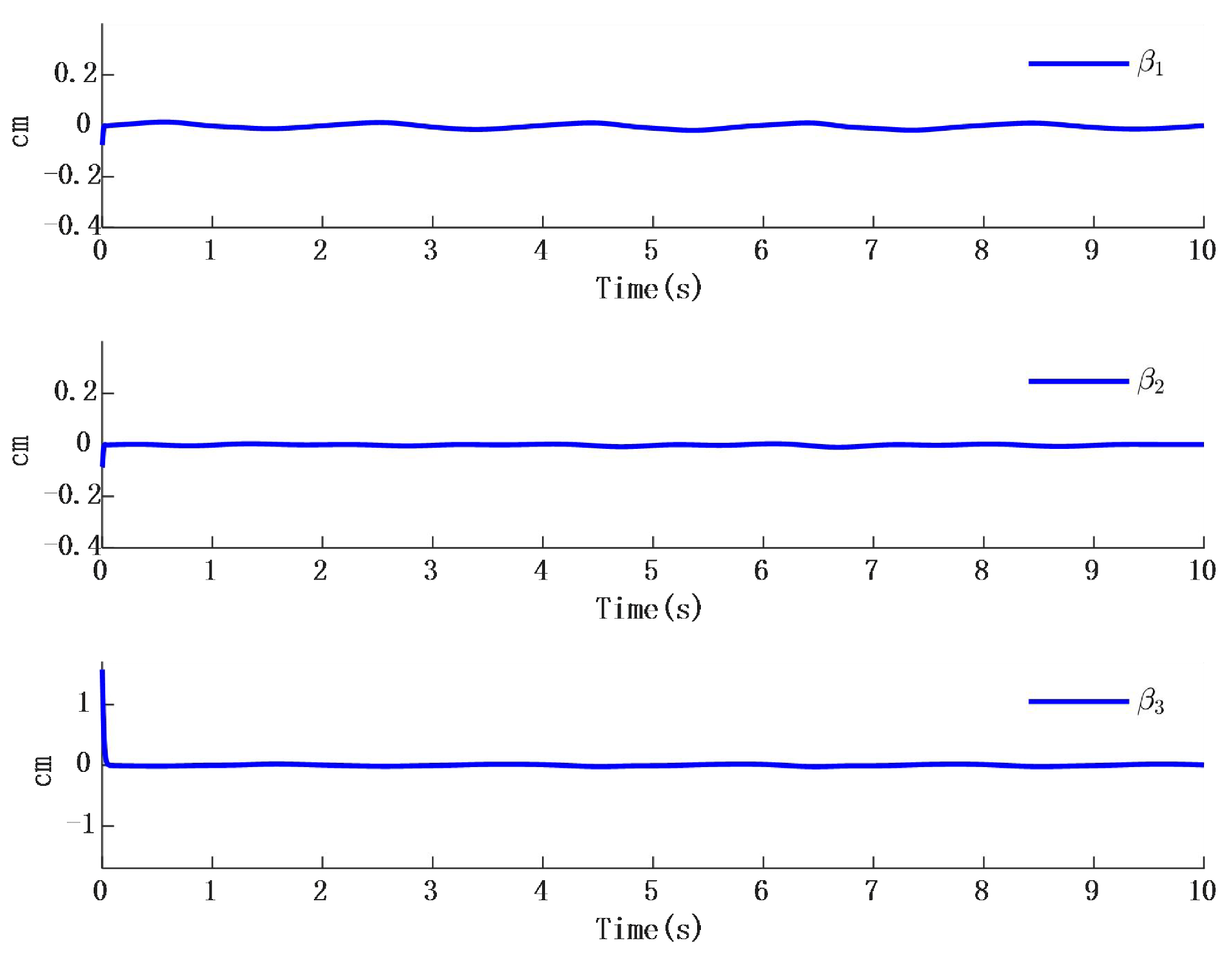
3. Simulation Verification of RBFNN-Based Adaptive Robust Control
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Udd, E. An overview of the development of fiber gyros. Opt. Waveguide Laser Sens. 2020, 11405, 1140502. [Google Scholar]
- Wang, Q.; Yang, C.; Wang, X.; Wang, Z. All-digital signal-processing open-loop fiber-optic gyroscope with enlarged dynamic range. Opt. Lett. 2013, 38, 5422–5425. [Google Scholar] [CrossRef] [PubMed]
- Jin, J.; Ren, C.; Teng, F.; Zhang, S. Method of suppression of impulse interferences in digital closed loop fiber optic gyro detected signal. Acta Astronaut. 2017, 130, 162–166. [Google Scholar] [CrossRef]
- Zhao, S.; Zhou, Y.; Shu, X. Analysis of fiber optic gyroscope dynamic error based on CEEMDAN. Opt. Fiber Technol. 2022, 69, 102835. [Google Scholar] [CrossRef]
- Mou, J.; Huang, T.; Shu, X. Error analysis and comparison of the fiber optic gyroscope scale factor obtained by angular velocity method and angular increment method. Mapan-J. Metrol. Soc. India 2020, 35, 407–419. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, C.; Li, L.; Song, L. Loop gain stabilizing with an all-digital automatic-gain-control method for high-precision fiber-optic gyroscope. Appl. Opt. 2016, 55, 4589–4595. [Google Scholar] [CrossRef]
- Pogorelaya, D.A.; Smolovik, M.A.; Volkovskiy, S.A.; Mikheev, M. Adjustment of PID controller in fiber-optic gyro feedback loop. Gyroscopy Navig. 2017, 8, 235–239. [Google Scholar] [CrossRef]
- Li, Q.; Ben, Y.; Sun, F. Strapdown fiber optic gyrocompass using adaptive network-based fuzzy inference system. Opt. Eng. 2014, 53, 014103. [Google Scholar] [CrossRef]
- Pan, Y.; Du, P.; Xue, H.; Lam, H.-K. Singularity-free fixed-time fuzzy control for robotic systems with user-defined performance. IEEE Trans. Fuzzy Syst. 2020, 29, 2388–2398. [Google Scholar] [CrossRef]
- Fei, J.; Xin, M. An adaptive fuzzy sliding mode controller for MEMS triaxial gyroscope with angular velocity estimation. Nonlinear Dyn. 2012, 70, 97–109. [Google Scholar] [CrossRef]
- Şerbetçi, H.; Navruz, İ. Kapalı Döngü Fiberoptik Jiroskop Sistemleri için Yerçekimi Arama Algoritmasına Dayalı PID Kontrolcü Tasarımı. Int. J. Eng. Res. Dev. 2019, 11, 695–704. [Google Scholar]
- Shao, X.; Shi, Y. Neural adaptive control for MEMS gyroscope with full-state constraints and quantized input. IEEE Trans. Ind. Inform. 2020, 16, 6444–6454. [Google Scholar] [CrossRef]
- Li, Z.; Yang, C.; Tang, Y. Decentralised adaptive fuzzy control of coordinated multiple mobile manipulators interacting with non-rigid environments. IET Control Theory Appl. 2013, 7, 397–410. [Google Scholar] [CrossRef]
- Ding, J.; Zhang, J.; Huang, W.; Chen, S. Laser gyro temperature compensation using modified RBFNN. Sensors 2014, 14, 18711–18727. [Google Scholar] [CrossRef]
- Zirkohi, M.M. Adaptive interval type-2 fuzzy recurrent RBFNN control design using ellipsoidal membership functions with application to MEMS gyroscope. ISA Trans. 2022, 119, 25–40. [Google Scholar] [CrossRef] [PubMed]
- Fei, J.; Ding, H.; Hou, S.; Wang, S.; Xin, M. Robust adaptive neural sliding mode approach for tracking control of a MEMS triaxial gyroscope. Int. J. Adv. Robot. Syst. 2012, 9, 20. [Google Scholar] [CrossRef]
- Xin, M.; Fei, J. Adaptive vibration control for MEMS vibratory gyroscope using backstepping sliding mode control. J. Vib. Control 2015, 21, 808–817. [Google Scholar] [CrossRef]
- Fei, J.; Batur, C. A novel adaptive sliding mode control with application to MEMS gyroscope. ISA Trans. 2009, 48, 73–78. [Google Scholar] [CrossRef]
- Zirkohi, M.M. Adaptive backstepping control design for MEMS gyroscope based on function approximation techniques with input saturation and output constraints. Comput. Electr. Eng. 2022, 97, 107547. [Google Scholar] [CrossRef]
- Liang, H.; Liu, G.; Huang, T.; Lam, H.-K.; Wang, B. Cooperative fault-tolerant control for networks of stochastic nonlinear systems with nondifferential saturation nonlinearity. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1362–1372. [Google Scholar] [CrossRef]
- Kong, L.; He, W.; Dong, Y.; Cheng, L.; Yang, C.; Li, Z. Asymmetric bounded neural control for an uncertain robot by state feedback and output feedback. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1735–1746. [Google Scholar] [CrossRef]
- Yang, C.; Huang, D.; He, W.; Cheng, L. Neural control of robot manipulators with trajectory tracking constraints and input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4231–4242. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| −0.4 | 0.22 | −0.15 | |||
| 3 | 3 | 3 | |||
| 10 | 10 | 10 | |||
| 100 | L | 10 | 5 | ||
| −2 | −3 | −1 | |||
| 100 | 200 | 300 | |||
| 0.6 | 0.9 | 0.3 | |||
| 0.001 | 0.002 | 0.003 | |||
| 3 | 3 | 3 | |||
| 0.002 | 0.004 | 0.006 | |||
| 100 | 200 | 300 | |||
| 250 | 350 | 450 | |||
| 20 | 10 | 0.1 | |||
| 0.6 | 0.9 | 0.3 | |||
| 0.5 | 0.7 | 0.4 |
| Time (Second) | |||||
|---|---|---|---|---|---|
| −20 | 20 | −20 | 20 | −20 | |
| −20 | 20 | −20 | 20 | −20 | |
| −20 | 20 | −20 | 20 | −20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Lian, B.; Ma, J.; Ding, X.; Li, H. Adaptive Neural Network Robust Control of FOG with Output Constraints. Biomimetics 2025, 10, 372. https://doi.org/10.3390/biomimetics10060372
Liu S, Lian B, Ma J, Ding X, Li H. Adaptive Neural Network Robust Control of FOG with Output Constraints. Biomimetics. 2025; 10(6):372. https://doi.org/10.3390/biomimetics10060372
Chicago/Turabian StyleLiu, Shangbo, Baowang Lian, Jiajun Ma, Xiaokun Ding, and Haiyan Li. 2025. "Adaptive Neural Network Robust Control of FOG with Output Constraints" Biomimetics 10, no. 6: 372. https://doi.org/10.3390/biomimetics10060372
APA StyleLiu, S., Lian, B., Ma, J., Ding, X., & Li, H. (2025). Adaptive Neural Network Robust Control of FOG with Output Constraints. Biomimetics, 10(6), 372. https://doi.org/10.3390/biomimetics10060372