
Path Optimization Strategy for Unmanned Aerial Vehicles Based on Improved Black Winged Kite Optimization Algorithm


Abstract
1. Introduction
2. Related Work
3. UAV Path Optimization Mathematical Model
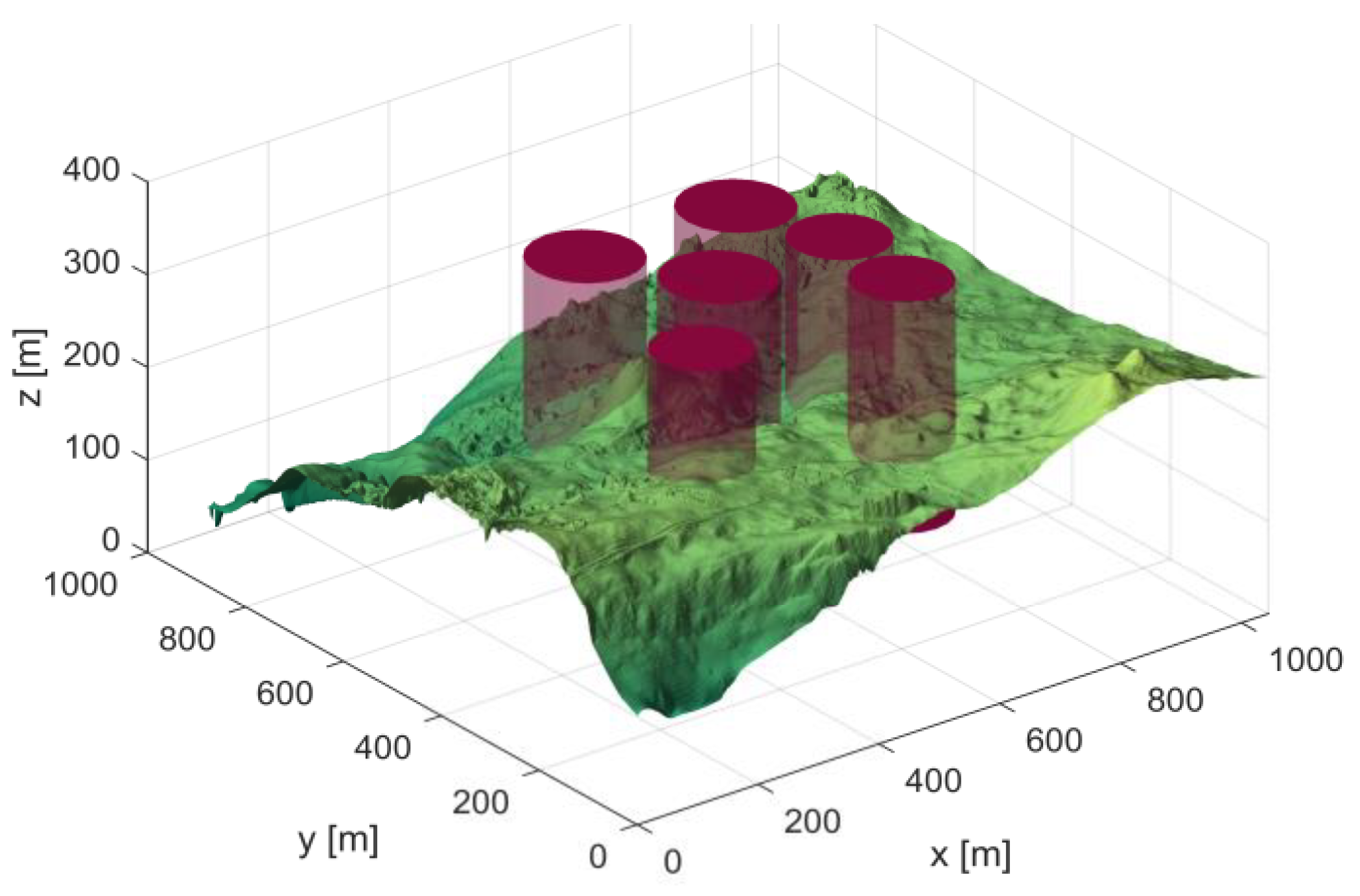
3.1. Terrain Area Modeling
3.2. Threat Area Modeling
3.3. Loss Function
4. Black-Winged Kite Optimization Algorithm
4.1. Population Initialization
4.2. Attack Stage
4.3. Migration Stage
5. Improved Black-Winged Kite Optimization Algorithm
5.1. Tent Chaos Mapping
5.2. Gaussian Mutation
| Algorithm 1. Algorithm Pseudocode of TGBKA. |
| Input: Population size pop Number of iterations T Lower bound lb Upper bound ub Dimension dim Objective function fobj
|
| Output: Best fitness Best_Fitness_BKA, best position Best_Pos_BKA. |
6. Experimental Results and Analysis of the Algorithm Test
6.1. Experimental Simulation Environment
6.2. Performance Indicators
- Optimal value Min.
- 2.
- Average error value Mean.
- 3.
- Standard error value Std.
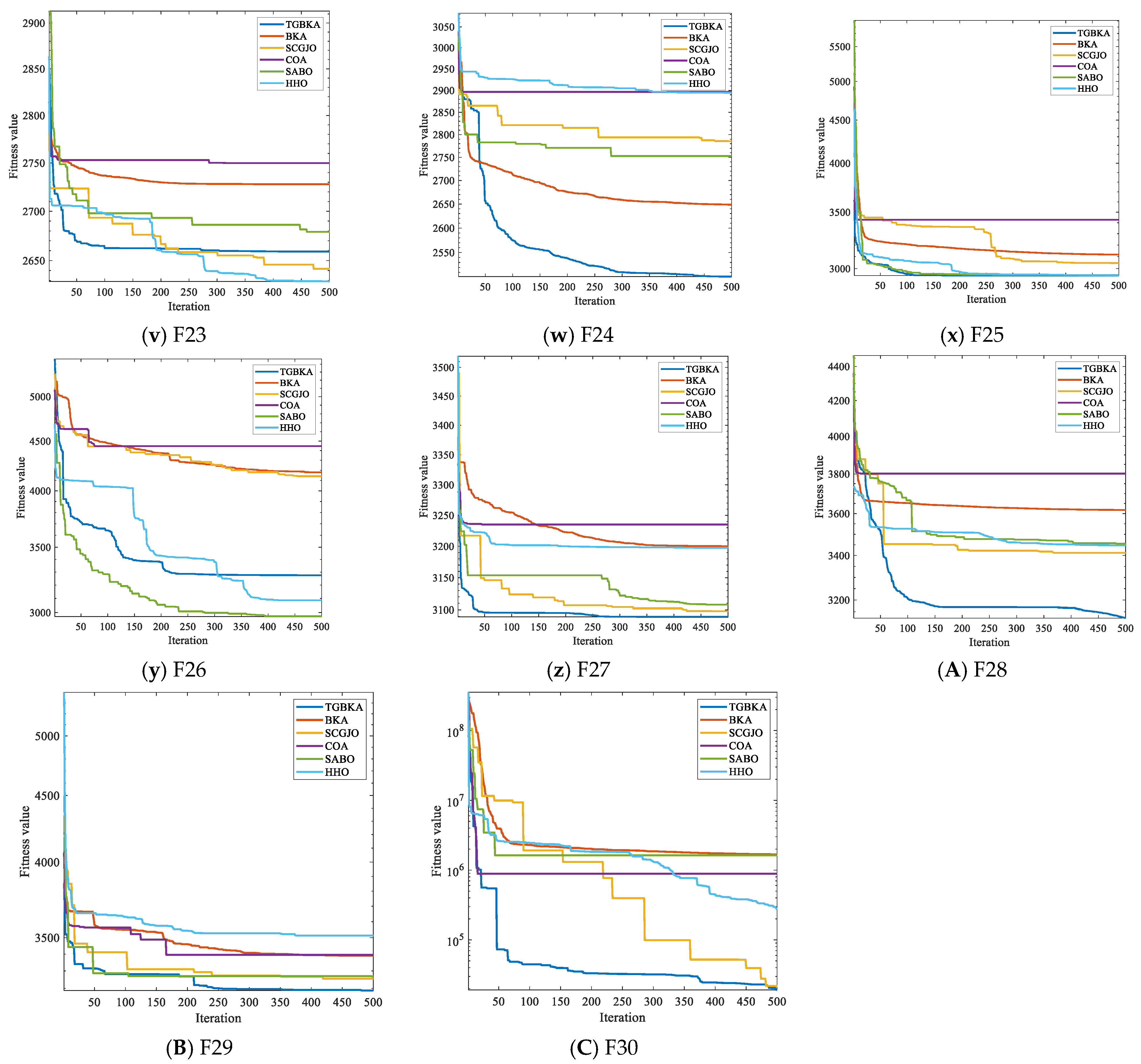
6.3. Comparison of Algorithms in the CEC2017 Test Set
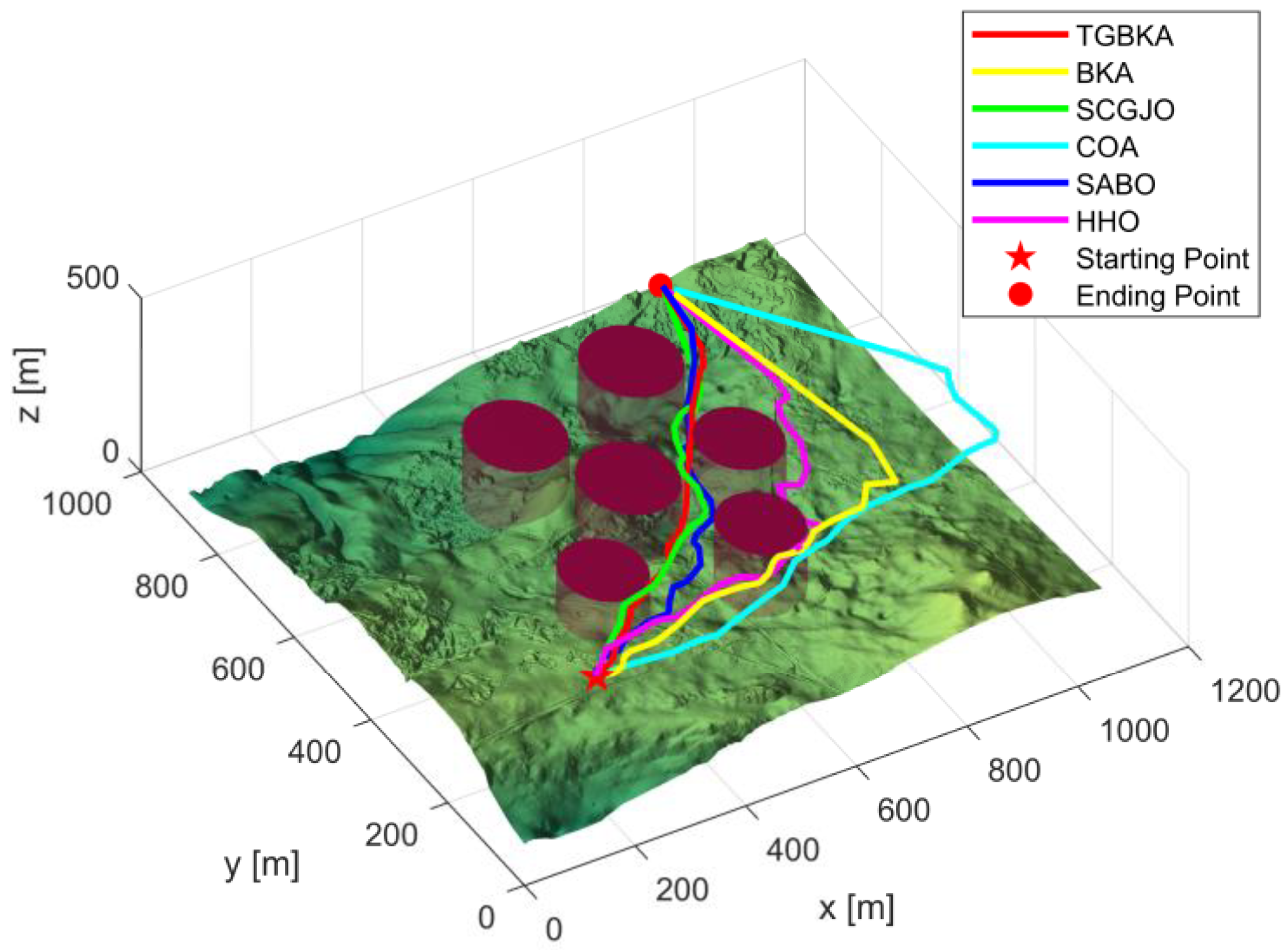
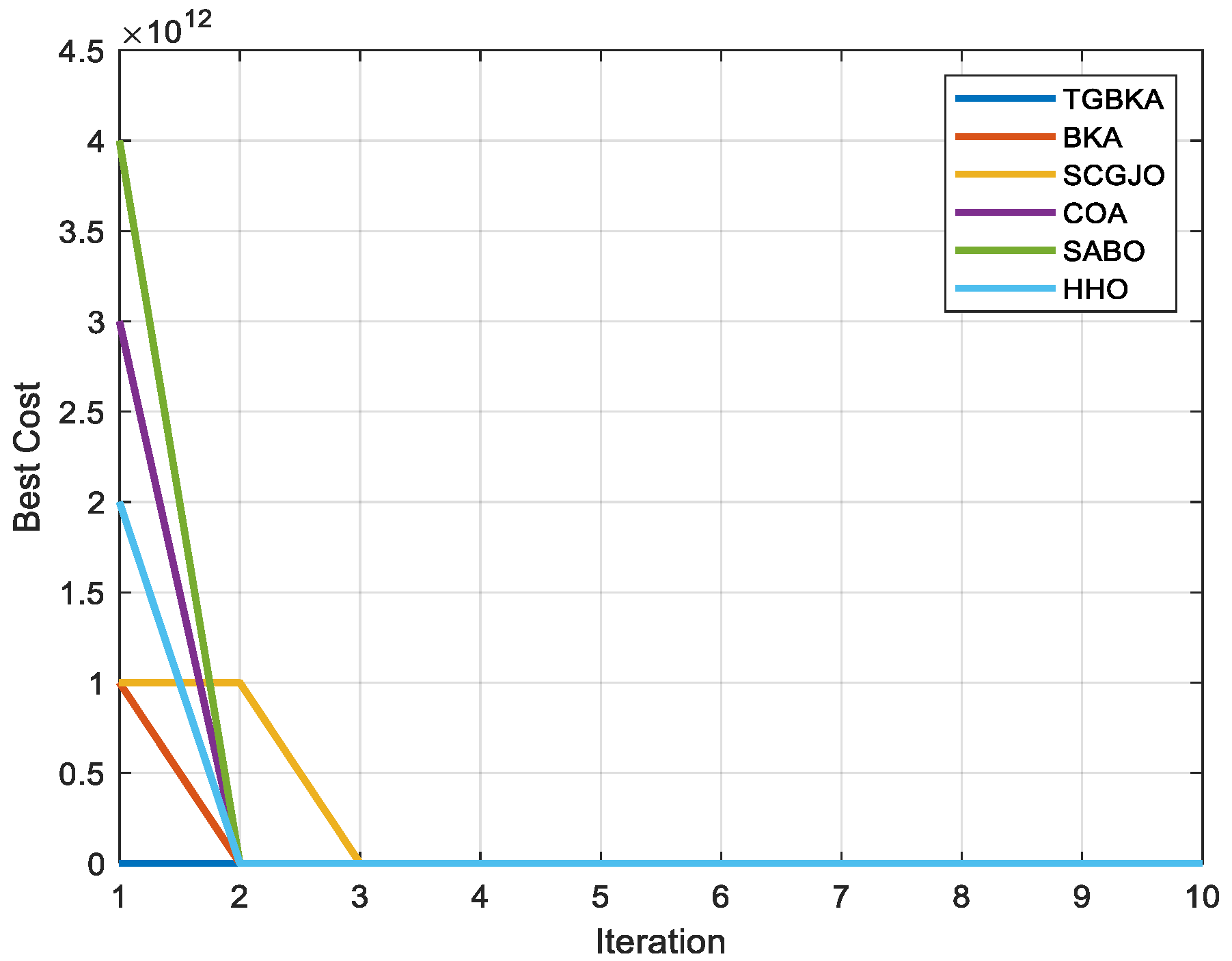
6.4. UAV Path Optimization Comparison
6.4.1. Simulation Scene 1
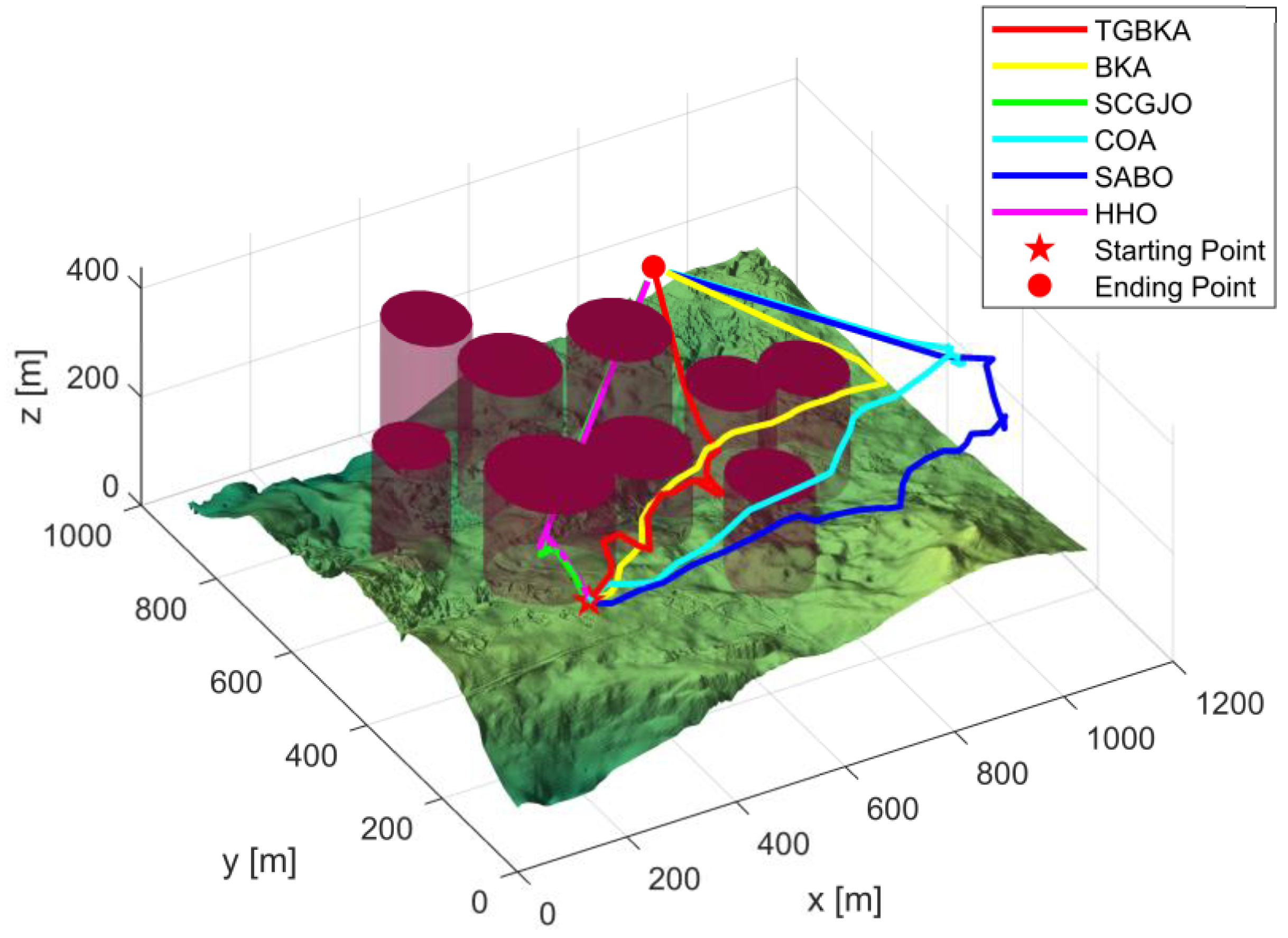
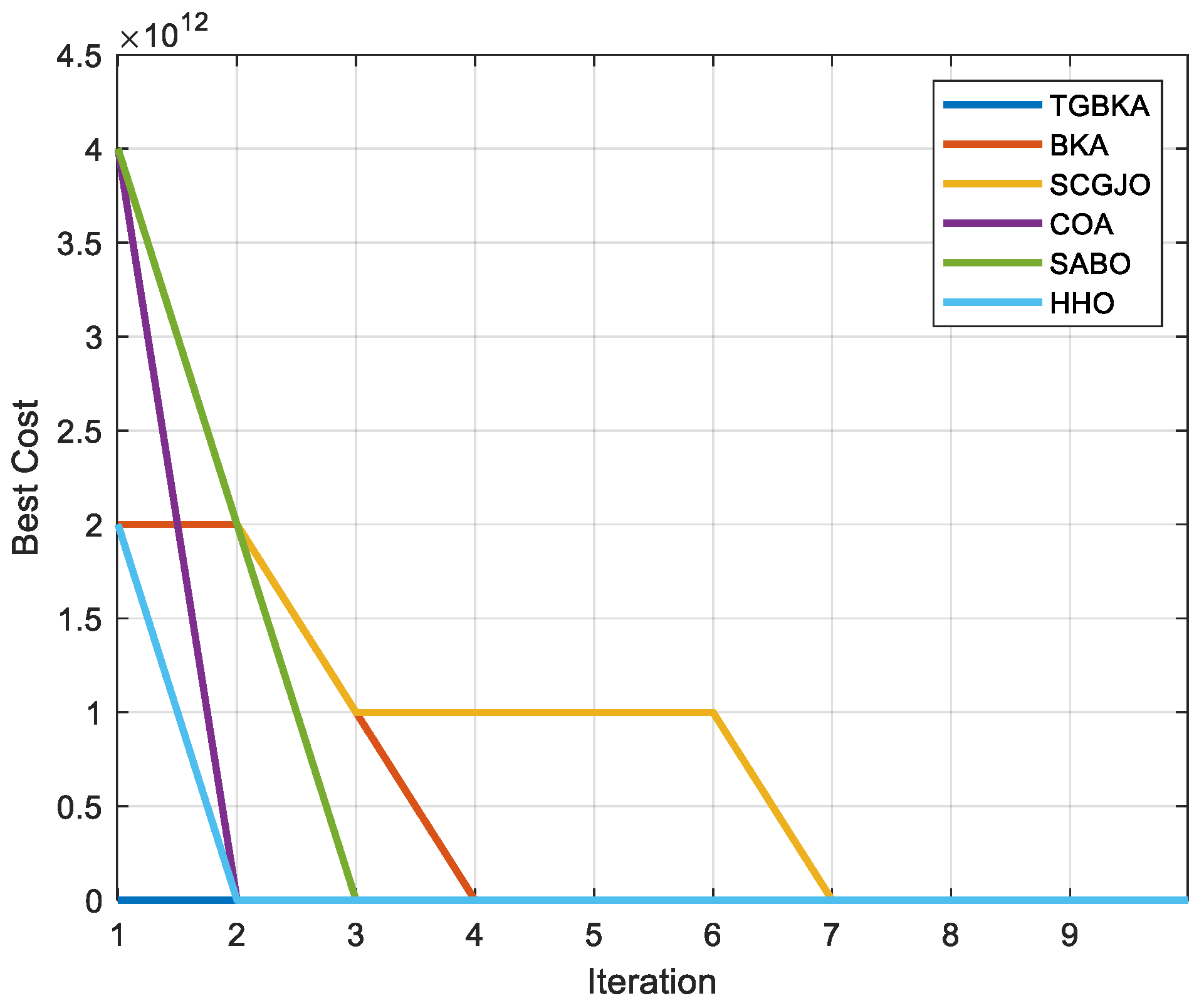
6.4.2. Simulation Scene 2
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, C.; Zhang, Y.; Gong, D.; Ji, X. A review of surrogate-assisted evolutionary algorithms for expensive optimization problems. Expert Syst. Appl. 2023, 217, 119495. [Google Scholar]
- Dehghani, M.; Montazeri, Z.; Trojovská, E.; Trojovský, P. Coati Optimization Algorithm: A new bio-inspired metaheuristic algorithm for solving optimization problems. Knowl. Based Syst. 2023, 259, 110011. [Google Scholar]
- Gong, C.; Zhou, N.; Xia, S.; Huang, S. Quantum particle swarm optimization algorithm based on diversity migration strategy. Future Gener. Comput. Syst. 2024, 157, 445–458. [Google Scholar]
- Dehghani, M.; Trojovský, P. Osprey optimization algorithm: A new bio-inspired metaheuristic algorithm for solving engineering optimization problems. Front. Mech. Eng. 2023, 8, 1126450. [Google Scholar]
- Wang, S.; Cao, L.; Chen, Y.; Chen, C.; Yue, Y.; Zhu, W. Gorilla optimization algorithm combining sine cosine and cauchy variations and its engineering applications. Sci. Rep. 2024, 14, 7578. [Google Scholar] [CrossRef]
- Jiang, S.; Yue, Y.; Chen, C.; Cao, L. A Multi-Objective Optimization Problem Solving Method Based on Improved Golden Jackal Optimization Algorithm and Its Application. Biomimetics 2024, 9, 270. [Google Scholar] [CrossRef]
- Chen, C.; Cao, L.; Chen, Y.; Chen, B.; Yue, Y. A comprehensive survey of convergence analysis of beetle antennae search algorithm and its applications. Artif. Intell. Rev. 2024, 57, 141. [Google Scholar]
- Seyyedabbasi, A.; Kiani, F. Sand Cat swarm optimization: A nature-inspired algorithm to solve global optimization problems. Eng. Comput. 2023, 39, 2627–2651. [Google Scholar]
- Yue, Y.; Cao, L.; Lu, D.; Hu, Z.; Xu, M.; Wang, S.; Li, B.; Ding, H. Review and empirical analysis of sparrow search algorithm. Artif. Intell. Rev. 2023, 56, 10867–10919. [Google Scholar]
- Ala, A.; Simic, V.; Pamucar, D.; Bacanin, N. Enhancing patient information performance in internet of things-based smart healthcare system: Hybrid artificial intelligence and optimization approaches. Eng. Appl. Artif. Intell. 2024, 131, 107889. [Google Scholar] [CrossRef]
- Hassaballah, M.; Wazery, Y.M.; Ibrahim, I.E.; Farag, A. Ecg heartbeat classification using machine learning and metaheuristic optimization for smart healthcare systems. Bioengineering 2023, 10, 429. [Google Scholar] [CrossRef] [PubMed]
- Chou, J.S.; Chen, K.E. Optimizing investment portfolios with a sequential ensemble of decision tree-based models and the FBI algorithm for efficient financial analysis. Appl. Soft Comput. 2024, 158, 111550. [Google Scholar]
- Olorunyomi, T.D.; Sanyaolu, T.O.; Adeleke, A.G.; Okeke, I.C. Integrating FinOps in healthcare for optimized financial efficiency and enhanced care. Int. J. Front. Sci. Technol. Res. 2024, 7, 20–28. [Google Scholar]
- Chen, B.; Cao, L.; Chen, C.; Chen, Y.; Yue, Y. A comprehensive survey on the chicken swarm optimization algorithm and its applications: State-of-the-art and research challenges. Artif. Intell. Rev. 2024, 57, 170. [Google Scholar]
- Abdollahzadeh, B.; Khodadadi, N.; Barshandeh, S.; Trojovský, P.; Gharehchopogh, F.; El-kenawy, E.; Abualigah, L.; Mirjalili, S. Puma optimizer (PO): A novel metaheuristic optimization algorithm and its application in machine learning. Clust. Comput. 2024, 27, 5235–5283. [Google Scholar]
- Liu, C.; Wu, L.; Xiao, W.; Li, G.; Xu, D.; Guo, J.; Li, W. An improved heuristic mechanism ant colony optimization algorithm for solving path planning. Knowl. Based Syst. 2023, 271, 110540. [Google Scholar]
- Salunkhe, D.H.; Michel, G.; Kumar, S.; Sanguineti, M.; Chablat, D. An efficient combined local and global search strategy for optimization of parallel kinematic mechanisms with joint limits and collision constraints. Mech. Mach. Theory 2022, 173, 104796. [Google Scholar]
- Hassan, M.H.; Kamel, S.; Jurado, F.; Desideri, U. Global optimization of economic load dispatch in large scale power systems using an enhanced social network search algorithm. Int. J. Electr. Power Energy Syst. 2024, 156, 109719. [Google Scholar]
- Zhu, D.; Wang, S.; Zhou, C.; Yan, S.; Xue, J. Human memory optimization algorithm: A memory-inspired optimizer for global optimization problems. Expert Syst. Appl. 2024, 237, 121597. [Google Scholar]
- Fu, Y.; Liu, D.; Chen, J.; He, L. Secretary bird optimization algorithm: A new metaheuristic for solving global optimization problems. Artif. Intell. Rev. 2024, 57, 123. [Google Scholar]
- Kalita, K.; Ramesh, J.V.N.; Cepova, L.; Pandya, S.B.; Jangir, P.; Abualigah, L. Multi-objective exponential distribution optimizer (MOEDO): A novel math-inspired multi-objective algorithm for global optimization and real-world engineering design problems. Sci. Rep. 2024, 14, 1816. [Google Scholar] [CrossRef] [PubMed]
- Tian, Z.; Gai, M. Football team training algorithm: A novel sport-inspired meta-heuristic optimization algorithm for global optimization. Expert Syst. Appl. 2024, 245, 123088. [Google Scholar] [CrossRef]
- Huang, B.; Liu, Y.; Jiang, Y.L.; Wang, J. Two-timescale projection neural networks in collaborative neurodynamic approaches to global optimization and distributed optimization. Neural Netw. 2024, 169, 83–91. [Google Scholar] [CrossRef]
- Li, G.; Zhang, T.; Tsai, C.Y.; Yao, L.; Lu, Y.; Tang, J. Review of the metaheuristic algorithms in applications: Visual analysis based on bibliometrics (1994–2023). Expert Syst. Appl. 2024, 255, 124857. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K. Goal distance-based UAV path planning approach, path optimization and learning-based path estimation: GDRRT*, PSO-GDRRT* and BiLSTM-PSO-GDRRT. Appl. Soft Comput. 2023, 137, 110156. [Google Scholar] [CrossRef]
- Yahia, H.S.; Mohammed, A.S. Path planning optimization in unmanned aerial vehicles using meta-heuristic algorithms: A systematic review. Environ. Monit. Assess. 2023, 195, 30. [Google Scholar] [CrossRef]
- Hooshyar, M.; Huang, Y.M. Meta-heuristic algorithms in UAV path planning optimization: A systematic review (2018–2022). Drones 2023, 7, 687. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, S. Flying path optimization of rechargeable UAV for data collection in wireless sensor networks. IEEE Sens. Lett. 2023, 7, 1–4. [Google Scholar] [CrossRef]
- Poudel, S.; Arafat, M.Y.; Moh, S. Bio-inspired optimization-based path planning algorithms in unmanned aerial vehicles: A survey. Sensors 2023, 23, 3051. [Google Scholar] [CrossRef]
- Ju, T.; Li, L.; Liu, S.; Zhang, Y. A multi-UAV assisted task offloading and path optimization for mobile edge computing via multi-agent deep reinforcement learning. J. Netw. Comput. Appl. 2024, 229, 103919. [Google Scholar] [CrossRef]
- Wang, J.; Wang, W.; Hu, X.; Qiu, L.; Zang, H. Black-winged kite algorithm: A nature-inspired meta-heuristic for solving benchmark functions and engineering problems. Artif. Intell. Rev. 2024, 57, 98. [Google Scholar]
- Zhang, Z.; Wang, X.; Yue, Y. Heuristic Optimization Algorithm of Black-Winged Kite Fused with Osprey and Its Engineering Application. Biomimetics 2024, 9, 595. [Google Scholar] [CrossRef]
- Li, Y.; Shi, B.; Qiao, W.; Du, Z. A black-winged kite optimization algorithm enhanced by osprey optimization and vertical and horizontal crossover improvement. Sci. Rep. 2025, 15, 6737. [Google Scholar]
- Ghanim, M.R.; Abbas, F.N.; Shawi, R.T. Optimizing Feature Selection Based on the Black-Winged Kite Algorithm. Ing. Des Syst. D’Inf. 2025, 30, 409. [Google Scholar]
- Zhou, M.; Shi, C.; Hu, F.; Zhu, Z.; Wang, K.; Sun, X.; Zhang, Y.; Zhou, M.; Zhang, L.; Zhang, Y. RC parameter identification and load aggregation analysis of air-conditioning systems: A multi-strategy improved black-winged kite algorithm. Energy Build. 2025, 337, 115641. [Google Scholar]
- Sun, H.; Yang, S. Range-free localization algorithm based on modified distance and improved black-winged kite algorithm. Comput. Netw. 2025, 259, 111091. [Google Scholar]
- Liu, X.; Wang, F.; Liu, Y.; Li, L. A Multi-Objective Black-Winged Kite Algorithm for Multi-UAV Cooperative Path Planning. Drones 2025, 9, 118. [Google Scholar] [CrossRef]
- Haohao, M.; As’ arry, A.; Yanwei, F.; Lulu, C.; Delgoshaei, A.; Ismail, M.I.S.; Ramli, H.R. Improved black-winged kite algorithm and finite element analysis for robot parallel gripper design. Adv. Mech. Eng. 2024, 16, 16878132241288402. [Google Scholar]
- Zhang, X.; Wu, K.; Zhang, C.; Shao, X.; Shen, H.; Heidari, A.A.; Chen, C.; Chen, H.; Gao, Z. An enhanced black-winged kite algorithm boosted machine learning prediction model for patients’ waiting time. Biomed. Signal Process. Control 2025, 105, 107425. [Google Scholar]
- Wang, J.; Wang, X.; Jia, C.; Yang, C. Indoor visible light 3D localization system based on black wing kite algorithm. IEEE Access 2025, 13, 20960–20973. [Google Scholar]
- Fu, Y.; Liu, D.; Fu, S.; Chen, J.; He, L. Enhanced Aquila optimizer based on tent chaotic mapping and new rules. Sci. Rep. 2024, 14, 3013. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Liu, H.; Guo, J.; Wang, Y.; Liu, L.; Liu, H.; Cong, H. Improved GWO-MCSVM algorithm based on nonlinear convergence factor and tent chaotic mapping and its application in transformer condition assessment. Electr. Power Syst. Res. 2023, 224, 109754. [Google Scholar] [CrossRef]
- Sun, L.; Liang, H.; Ding, W.; Xu, J.; Chang, B. CMEFS: Chaotic mapping-based mayfly optimization with fuzzy entropy for feature selection. Appl. Intell. 2024, 54, 7397–7417. [Google Scholar] [CrossRef]
- Motwakel, A.; Hashim, A.H.A.; Alamro, H.; Alqahtani, H.; Alotaibi, F.A.; Sayed, A. Chaotic Mapping Lion Optimization Algorithm-Based Node Localization Approach for Wireless Sensor Networks. Sensors 2023, 23, 8699. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Duan, Y.; Cai, Z. Sub-population improved grey wolf optimizer with Gaussian mutation and Lévy flight for parameters identification of photovoltaic models. Expert Syst. Appl. 2023, 232, 120827. [Google Scholar] [CrossRef]
- Adegboye, O.R.; Deniz Ülker, E. Gaussian mutation specular reflection learning with local escaping operator based artificial electric field algorithm and its engineering application. Appl. Sci. 2023, 13, 4157. [Google Scholar] [CrossRef]
- Qian, P.; Luo, H.; Liu, L.; Lv, P.; Pu, C.; Meng, D.; Páez, L.M.R. A hybrid Gaussian mutation PSO with search space reduction and its application to intelligent selection of piston seal grooves for homemade pneumatic cylinders. Eng. Appl. Artif. Intell. 2023, 122, 106156. [Google Scholar] [CrossRef]
- Zitouni, F.; Almazyad, A.S.; Xiong, G.; Mohamed, A.W.; Harous, S. An opposition-based great wall construction metaheuristic algorithm with Gaussian mutation for feature selection. IEEE Access 2024, 12, 30796–30823. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, G.; Kong, M.; Zhang, T. SCGJO: A hybrid golden jackal optimization with a sine cosine algorithm for tackling multilevel thresholding image segmentation. Multimed. Tools Appl. 2024, 83, 7681–7719. [Google Scholar] [CrossRef]
- Basil, N.; Marhoon, H.M. Towards evaluation of the PID criteria based UAVs observation and tracking head within resizable selection by COA algorithm. Results Control Optim. 2023, 12, 100279. [Google Scholar] [CrossRef]
- Goodarzimehr, V.; Topal, U.; Das, A.K.; Vo-Duy, T. SABO algorithm for optimum design of truss structures with multiple frequency constraints. Mech. Based Des. Struct. Mach. 2024, 52, 7745–7777. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Indicator | TGBKA | BKA | SCGJO | COA | SABO | HHO |
|---|---|---|---|---|---|---|---|
| F1 | Min | 1.8 × 109 | 2.84 × 1010 | 1.16 × 1010 | 3.77 × 1010 | 5.83 × 109 | 6.92 × 107 |
| Mean | 6.57 ×109 | 4.54 × 1010 | 2.58 × 1010 | 5.69 × 1010 | 1.48 × 1010 | 4.74 × 108 | |
| Std | 3.11 × 109 | 8.58 × 109 | 7.58 × 109 | 8.44 × 109 | 6.40 × 109 | 4.60 × 108 | |
| F2 | Min | 0 | 0 | 0 | 0 | 0 | 0 |
| Mean | 0 | 0 | 0 | 0 | 0 | 0 | |
| Std | 0 | 0 | 0 | 0 | 0 | 0 | |
| F3 | Min | 1.85 × 104 | 6.76 × 104 | 5.95 × 104 | 7.27 × 104 | 4.76 × 104 | 3.96 × 104 |
| Mean | 2.99 × 104 | 1.05 × 105 | 7.69 × 104 | 8.38 × 104 | 6.58 × 104 | 5.59 × 104 | |
| Std | 7.91 × 103 | 2.58 × 104 | 7.33 × 103 | 4.63 × 103 | 9.24 × 103 | 6.96 × 103 | |
| F4 | Min | 5.95 × 102 | 4.68 × 103 | 9.04 × 102 | 1.25 × 104 | 9.07 × 102 | 5.98 × 102 |
| Mean | 1.08 × 103 | 9.40 × 103 | 4.00 × 103 | 1.59 × 104 | 2.02 × 103 | 7.35 × 102 | |
| Std | 4.51 × 102 | 2.95 × 103 | 2.62 × 103 | 1.79 × 103 | 6.93 × 102 | 8.79 × 101 | |
| F5 | Min | 6.38 × 102 | 7.15 × 102 | 7.40 × 102 | 8.20 × 102 | 7.45 × 102 | 6.86 × 102 |
| Mean | 7.06 × 102 | 7.79 × 102 | 8.26 × 102 | 9.22 × 102 | 8.07 × 102 | 7.60 × 102 | |
| Std | 2.79 × 101 | 3.61 × 101 | 4.44 × 101 | 3.17 × 101 | 3.35 × 101 | 3.33 × 101 | |
| F6 | Min | 6.33 × 102 | 6.53 × 102 | 6.54 × 102 | 6.74 × 102 | 6.48 × 102 | 6.57 × 102 |
| Mean | 6.56 × 102 | 6.69 × 102 | 6.74 × 102 | 6.91 × 102 | 6.68 × 102 | 6.68 × 102 | |
| Std | 6.90 | 6.46 | 9.46 | 6.85 | 1.13×101 | 4.91 | |
| F7 | Min | 1.05 × 103 | 1.09 × 103 | 1.13 × 103 | 1.24 × 103 | 1.06 × 103 | 1.11 × 103 |
| Mean | 1.16 × 103 | 1.24 × 103 | 1.27 × 103 | 1.42 × 103 | 1.13 × 103 | 1.32 × 103 | |
| Std | 5.63 × 101 | 1.18 × 102 | 7.15 × 101 | 5.85 × 101 | 4.95 × 101 | 8.09 × 101 | |
| F8 | Min | 9.27 × 102 | 9.55 × 102 | 1.01 × 103 | 1.11 × 103 | 1.02 × 103 | 9.50 × 102 |
| Mean | 9.60 × 102 | 1.03 × 103 | 1.07 × 103 | 1.14 × 103 | 1.09 × 103 | 9.87 × 102 | |
| Std | 1.96 × 101 | 3.30 × 101 | 3.89 × 101 | 1.75 × 101 | 3.06 × 101 | 2.25 × 101 | |
| F9 | Min | 2.39 × 103 | 4.11 × 103 | 5.99 × 103 | 8.57 × 103 | 3.26 × 103 | 7.05 × 103 |
| Mean | 4.73 × 103 | 6.30 × 103 | 9.63 × 103 | 1.10 × 104 | 7.65 × 103 | 8.47 × 103 | |
| Std | 8.01 × 102 | 1.07 × 103 | 1.84 × 103 | 1.37 × 103 | 2.31 × 103 | 8.99 × 102 | |
| F10 | Min | 4.14 × 103 | 5.49 × 103 | 6.23 × 103 | 8.23 × 103 | 8.11 × 103 | 4.66 × 103 |
| Mean | 5.18 × 103 | 5.90 × 103 | 7.58 × 103 | 8.97 × 103 | 8.81 × 103 | 6.12 × 103 | |
| Std | 4.56 × 102 | 2.39 × 102 | 7.12 × 102 | 3.56 × 102 | 3.98 × 102 | 7.93 × 102 | |
| F11 | Min | 1.31 × 103 | 3.34 × 103 | 2.51 × 103 | 4.43 × 103 | 2.66 × 103 | 1.35 × 103 |
| Mean | 1.47 × 103 | 1.19 × 104 | 7.01 × 103 | 9.26 × 103 | 5.61 × 103 | 1.56 × 103 | |
| Std | 1.47 × 102 | 5.92 × 103 | 2.39 × 103 | 2.42 × 103 | 1.73 × 103 | 1.69 × 102 | |
| F12 | Min | 1.58 × 106 | 2.76 × 109 | 4.20 × 108 | 5.85 × 109 | 1.21 × 108 | 1.07 × 107 |
| Mean | 8.73 × 107 | 7.53 × 109 | 3.52 × 109 | 1.31 × 1010 | 6.96 × 108 | 7.94 × 107 | |
| Std | 1.40 × 108 | 2.02 × 109 | 2.16 × 109 | 3.13 × 109 | 6.68 × 108 | 4.48 × 107 | |
| F13 | Min | 5.13 × 104 | 7.08 × 107 | 2.06 × 107 | 2.51 × 109 | 3.44 × 106 | 3.56 × 105 |
| M×10an | 1.65 × 105 | 2.88 × 109 | 1.55 × 109 | 8.79 × 109 | 2.00 × 108 | 1.03 × 106 | |
| Std | 9.02 × 104 | 2.14 × 109 | 1.96 × 109 | 4.41 × 109 | 4.32 × 108 | 9.20 × 105 | |
| F14 | Min | 1.62 × 103 | 2.13 × 104 | 5.50 × 104 | 9.27 × 104 | 4.65 × 104 | 5.03 × 104 |
| Mean | 5.88 × 103 | 2.28 × 106 | 1.98 × 106 | 4.74 × 106 | 1.14 × 106 | 1.22 × 106 | |
| Std | 6.14 × 103 | 2.49 × 106 | 1.10 × 106 | 4.14 × 106 | 1.10 × 106 | 1.25 × 106 | |
| F15 | Min | 1.30 × 104 | 1.23 × 104 | 1.98 × 105 | 2.88 × 107 | 7.44 × 104 | 3.28 × 104 |
| Mean | 2.89 × 104 | 5.16 × 107 | 1.68 × 108 | 8.85 × 108 | 3.28 × 106 | 1.02 × 105 | |
| Std | 2.21 × 104 | 7.87 × 107 | 2.12 × 108 | 4.99 × 108 | 5.06 × 106 | 6.22 × 104 | |
| F16 | Min | 2.37 × 103 | 3.97 × 103 | 2.63 × 103 | 4.26 × 103 | 3.46 × 103 | 2.90 × 103 |
| Mean | 3.05 × 103 | 5.24 × 103 | 3.85 × 103 | 5.95 × 103 | 4.21 × 103 | 3.64 × 103 | |
| Std | 3.68 × 102 | 1.10 × 103 | 5.10 × 102 | 9.96 × 102 | 3.40 × 102 | 3.96 × 102 | |
| F17 | Min | 1.83 × 103 | 2.32 × 103 | 2.24 × 103 | 2.61 × 103 | 2.69 × 103 | 2.18 × 103 |
| Mean | 2.22 × 103 | 3.24 × 103 | 2.75 × 103 | 5.24 × 103 | 2.98 × 103 | 2.63 × 103 | |
| Std | 2.03 × 102 | 1.94 × 103 | 3.87 × 102 | 3.10 × 103 | 2.90 × 102 | 2.48 × 102 | |
| F18 | Min | 2.97 × 104 | 1.95 × 105 | 7.29 × 105 | 1.18 × 106 | 3.67 × 105 | 4.42 × 105 |
| Mean | 1.29 × 105 | 3.82 × 107 | 1.01 × 107 | 6.52 × 107 | 4.67 × 106 | 3.99 × 106 | |
| Std | 1.16 × 105 | 6.46 × 107 | 7.92 × 106 | 4.46 × 107 | 5.49 × 106 | 3.77 × 106 | |
| F19 | Min | 1.66 × 104 | 8.47 × 104 | 1.29 × 106 | 6.04 × 107 | 4.00 × 105 | 7.42 × 104 |
| Mean | 2.16 × 105 | 7.84 × 107 | 3.79 × 108 | 7.33 × 108 | 7.08 × 106 | 1.34 × 106 | |
| Std | 3.06 × 105 | 1.45 × 108 | 5.36 × 108 | 3.83 × 108 | 6.79 × 106 | 1.17 × 106 | |
| F20 | Min | 2.30 × 103 | 2.47 × 103 | 2.63 × 103 | 2.63 × 103 | 2.73 × 103 | 2.38 × 103 |
| Mean | 2.46 × 103 | 2.78 × 103 | 3.00 × 103 | 3.04 × 103 | 3.11 × 103 | 2.78 × 103 | |
| Std | 1.14 × 102 | 1.45 × 102 | 2.27 × 102 | 1.74 × 102 | 1.59 × 102 | 2.38 × 102 | |
| F21 | Min | 2.25 × 103 | 2.50 × 103 | 2.51 × 103 | 2.65 × 103 | 2.54 × 103 | 2.29 × 103 |
| Mean | 2.51 × 103 | 2.61 × 103 | 2.58 × 103 | 2.76 × 103 | 2.61 × 103 | 2.58 × 103 | |
| Std | 6.22 × 101 | 5.99 × 101 | 4.43 × 101 | 5.14 × 101 | 3.44 × 101 | 7.09 × 101 | |
| F22 | Min | 2.55 × 103 | 6.34 × 103 | 3.63 × 103 | 7.28 × 103 | 3.18 × 103 | 2.65 × 103 |
| Mean | 3.65 × 103 | 7.56 × 103 | 5.59 × 103 | 9.45 × 103 | 4.49 × 103 | 6.94 × 103 | |
| Std | 1.26 × 103 | 4.90 × 102 | 1.24 × 103 | 9.10 × 102 | 7.32 × 102 | 1.33 × 103 | |
| F23 | Min | 2.88 × 103 | 3.22 × 103 | 2.88 × 103 | 3.34 × 103 | 3.05 × 103 | 3.03 × 103 |
| Mean | 3.10 × 103 | 3.72 × 103 | 2.96 × 103 | 3.69 × 103 | 3.19 × 103 | 3.24 × 103 | |
| Std | 1.22 × 102 | 1.89 × 102 | 5.22 × 101 | 1.76 × 102 | 9.10 × 101 | 1.48 × 102 | |
| F24 | Min | 3.07 × 103 | 3.65 × 103 | 2.99 × 103 | 3.47 × 103 | 3.14 × 103 | 3.21 × 103 |
| Mean | 3.28 × 103 | 4.12 × 103 | 3.10 × 103 | 3.80 × 103 | 3.26 × 103 | 3.47 × 103 | |
| Std | 1.22 × 102 | 2.43 × 102 | 6.07 × 101 | 1.12 × 102 | 8.81 × 101 | 1.33 × 102 | |
| F25 | Min | 2.98 × 103 | 3.45 × 103 | 3.28 × 103 | 4.17 × 103 | 3.08 × 103 | 2.93 × 103 |
| Mean | 3.09 × 103 | 4.07 × 103 | 3.82 × 103 | 5.20 × 103 | 3.41 × 103 | 3.02 × 103 | |
| Std | 8.56 × 101 | 2.54 × 102 | 2.86 × 102 | 4.75 × 102 | 1.38 × 102 | 3.85 × 101 | |
| F26 | Min | 4.08 × 103 | 7.76 × 103 | 4.38 × 103 | 9.95 × 103 | 7.05 × 103 | 7.14 × 103 |
| Mean | 6.76 × 103 | 9.95 × 103 | 7.81 × 103 | 1.16 × 104 | 8.42 × 103 | 8.14 × 103 | |
| Std | 1.41 × 103 | 1.13 × 103 | 1.33 × 103 | 8.63 × 102 | 6.29 × 102 | 5.69 × 102 | |
| F27 | Min | 3.25 × 103 | 3.72 × 103 | 3.27 × 103 | 3.56 × 103 | 3.28 × 103 | 3.26 × 103 |
| Mean | 3.41 × 103 | 4.56 × 103 | 3.36 × 103 | 4.56 × 103 | 3.51 × 103 | 3.55 × 103 | |
| Std | 1.11 × 102 | 3.17 × 102 | 7.08 × 101 | 4.63 × 102 | 1.30 × 102 | 1.70 × 102 | |
| F28 | Min | 3.40 × 103 | 4.76 × 103 | 3.85 × 103 | 6.42 × 103 | 3.89 × 103 | 3.36 × 103 |
| Mean | 3.59 × 103 | 5.87 × 103 | 4.78 × 103 | 7.58 × 103 | 4.45 × 103 | 3.48 × 103 | |
| Std | 2.15 × 102 | 5.54 × 102 | 5.55 × 102 | 6.42 × 102 | 3.76 × 102 | 8.01 × 101 | |
| F29 | Min | 4.04 × 103 | 4.95 × 103 | 4.25 × 103 | 5.98 × 103 | 4.73 × 103 | 4.36 × 103 |
| Mean | 4.54 × 103 | 6.90 × 103 | 4.87 × 103 | 8.28 × 103 | 5.70 × 103 | 4.95 × 103 | |
| Std | 3.10 × 102 | 1.87 × 103 | 5.35 × 102 | 1.97 × 103 | 6.35 × 102 | 3.85 × 102 | |
| F30 | Min | 2.09 × 105 | 1.28 × 107 | 4.53 × 106 | 3.50 × 108 | 8.83 × 106 | 2.00 × 106 |
| Mean | 2.51 × 106 | 8.44 × 108 | 1.42 × 108 | 1.77 × 109 | 4.36 × 107 | 1.00 × 107 | |
| Std | 1.86 × 106 | 7.05 × 108 | 2.42 × 108 | 9.10 × 108 | 2.77 × 107 | 7.01 × 106 |
| Number | Coordinates | Height | Radius |
|---|---|---|---|
| 1 | (400, 600, 0) | 100 | 80 |
| 2 | (600, 250, 0) | 150 | 70 |
| 3 | (500, 450, 0) | 100 | 80 |
| 4 | (350, 300, 0) | 100 | 70 |
| 5 | (700, 450, 0) | 100 | 70 |
| 6 | (650, 660, 0) | 100 | 80 |
| Number | Coordinates | Height | Radius |
|---|---|---|---|
| 1 | (400, 600, 0) | 150 | 80 |
| 2 | (600, 200, 0) | 150 | 70 |
| 3 | (500, 400, 0) | 100 | 80 |
| 4 | (300, 350, 0) | 150 | 100 |
| 5 | (700, 450, 0) | 120 | 70 |
| 6 | (150, 500, 0) | 150 | 60 |
| 7 | (350, 750, 0) | 150 | 70 |
| 8 | (800, 400, 0) | 150 | 70 |
| 9 | (600, 600, 0) | 150 | 80 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Xu, B.; Zheng, Y.; Yue, Y.; Xiong, M. Path Optimization Strategy for Unmanned Aerial Vehicles Based on Improved Black Winged Kite Optimization Algorithm. Biomimetics 2025, 10, 310. https://doi.org/10.3390/biomimetics10050310
Wang S, Xu B, Zheng Y, Yue Y, Xiong M. Path Optimization Strategy for Unmanned Aerial Vehicles Based on Improved Black Winged Kite Optimization Algorithm. Biomimetics. 2025; 10(5):310. https://doi.org/10.3390/biomimetics10050310
Chicago/Turabian StyleWang, Shuxin, Bingruo Xu, Yejun Zheng, Yinggao Yue, and Mengji Xiong. 2025. "Path Optimization Strategy for Unmanned Aerial Vehicles Based on Improved Black Winged Kite Optimization Algorithm" Biomimetics 10, no. 5: 310. https://doi.org/10.3390/biomimetics10050310
APA StyleWang, S., Xu, B., Zheng, Y., Yue, Y., & Xiong, M. (2025). Path Optimization Strategy for Unmanned Aerial Vehicles Based on Improved Black Winged Kite Optimization Algorithm. Biomimetics, 10(5), 310. https://doi.org/10.3390/biomimetics10050310