

Can Anthropomorphic Interfaces Improve the Ergonomics and Safety Performance of Human–Machine Collaboration in Multitasking Scenarios?—An Example of Human–Machine Co-Driving in High-Speed Trains

Abstract
1. Introduction
- (1)
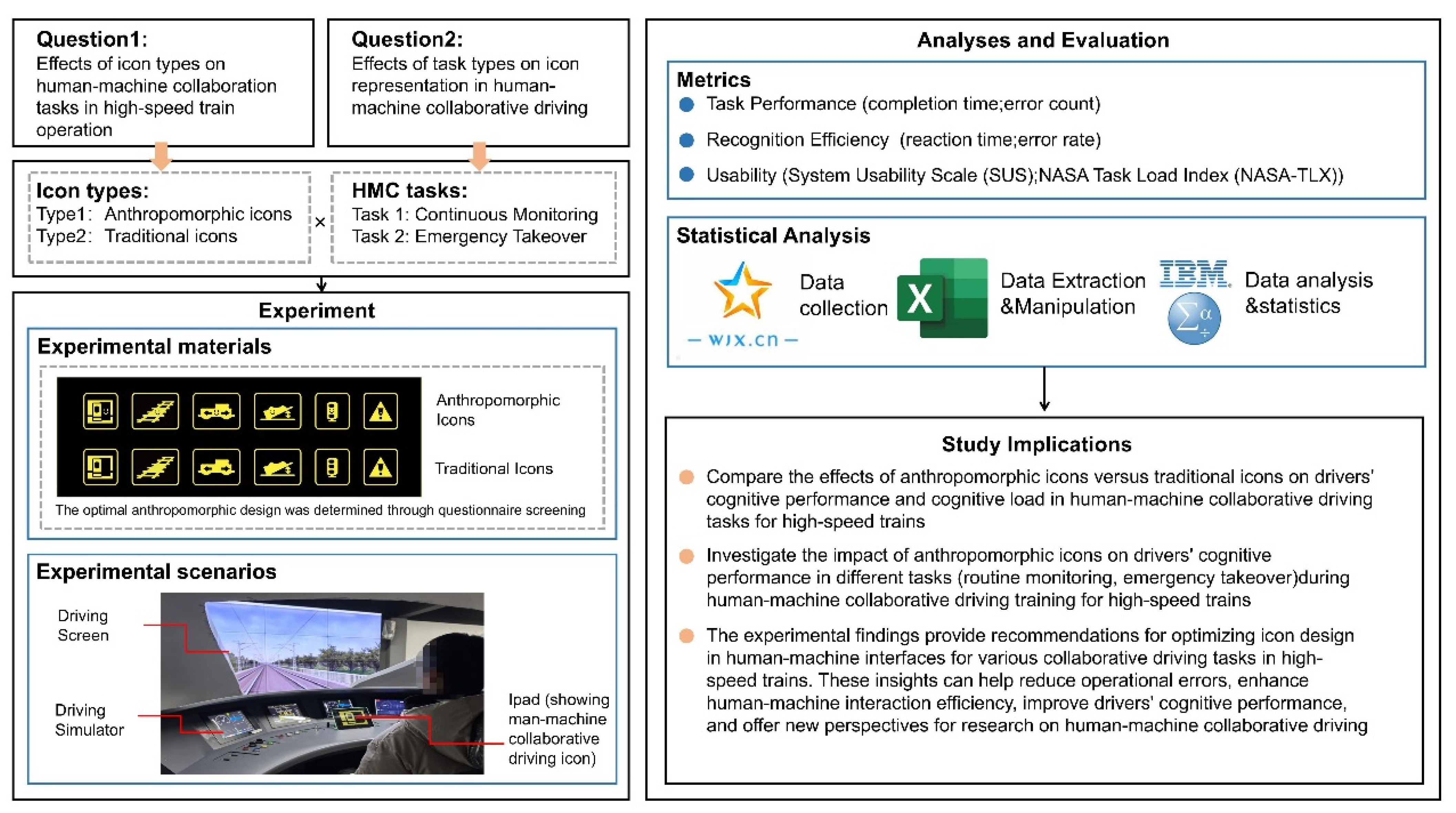
- The effects of anthropomorphic and traditional icons on the cognitive performance and cognitive load of drivers during human–machine collaborative driving tasks in high-speed trains were compared;
- (2)
- The effects of anthropomorphic icons on the cognitive performance of drivers in different tasks (i.e., daily observation and emergency takeover) during high-speed-train human–machine collaborative driving training were investigated;
- (3)
- The results of the experimental study provide several suggestions for the optimal design of icons in human–machine interaction interfaces for various human–machine collaborative driving tasks in high-speed trains. These suggestions can be used to reduce the probability of errors during train operation, improve the efficiency of human–machine interaction, enhance the cognitive level of the drivers, and provide a new way of thinking about the study of human–machine collaborative driving.
2. Research Method
2.1. Participants
2.2. Experimental Equipment
- (1)
- A high-speed-train human–machine co-operation simulation driving platform. This platform was built utilizing a fan-shaped console, four ZhiXianDa QC1009 touch screens (13 inches), one iPad tablet, and a combination of 16 large screens. The buttons on the fan-shaped console included most of the functions used for driving high-speed trains, and participants needed to be based on the icon in the console to produce the corresponding response. The iPad tablet was used to simulate a high-speed-train human–machine interface display (Figure 2);
- (2)
- High-speed-train human–machine collaboration icon material. Two different high-speed-train driving icon materials (anthropomorphic icons and traditional icons) were designed using Photoshop CC 2019 software, with the traditional icon being the icon used in the Chinese CRH380B high-speed train. The anthropomorphic icon was designed with reference to Duan’s research [17]. In this study, the anthropomorphism of the icon was scored using a seven-point Likert scale on the dimensions of “free will”, “consciousness”, “one’s own thoughts”, “emotion”, and “intention.” According to the scoring results, the smiling face graphics strongly increase anthropomorphism. Based on this, this study used the addition of smiley face graphics to perform icon anthropomorphic expressions. Each icon material set contained two different types of high-speed-train driving scenarios: a scenario requiring the frequent observation and identification of icons and a scenario requiring the emergence of unexpected situations and rapid action. The size and meaning of the two icons were the same (Figure 3). The icon material was rendered by importing it into the iPad;
- (3)
- Other equipment: Two Sony cx900e camera DVs were used to record the entire experiment.
2.3. Variable Design
- (1)
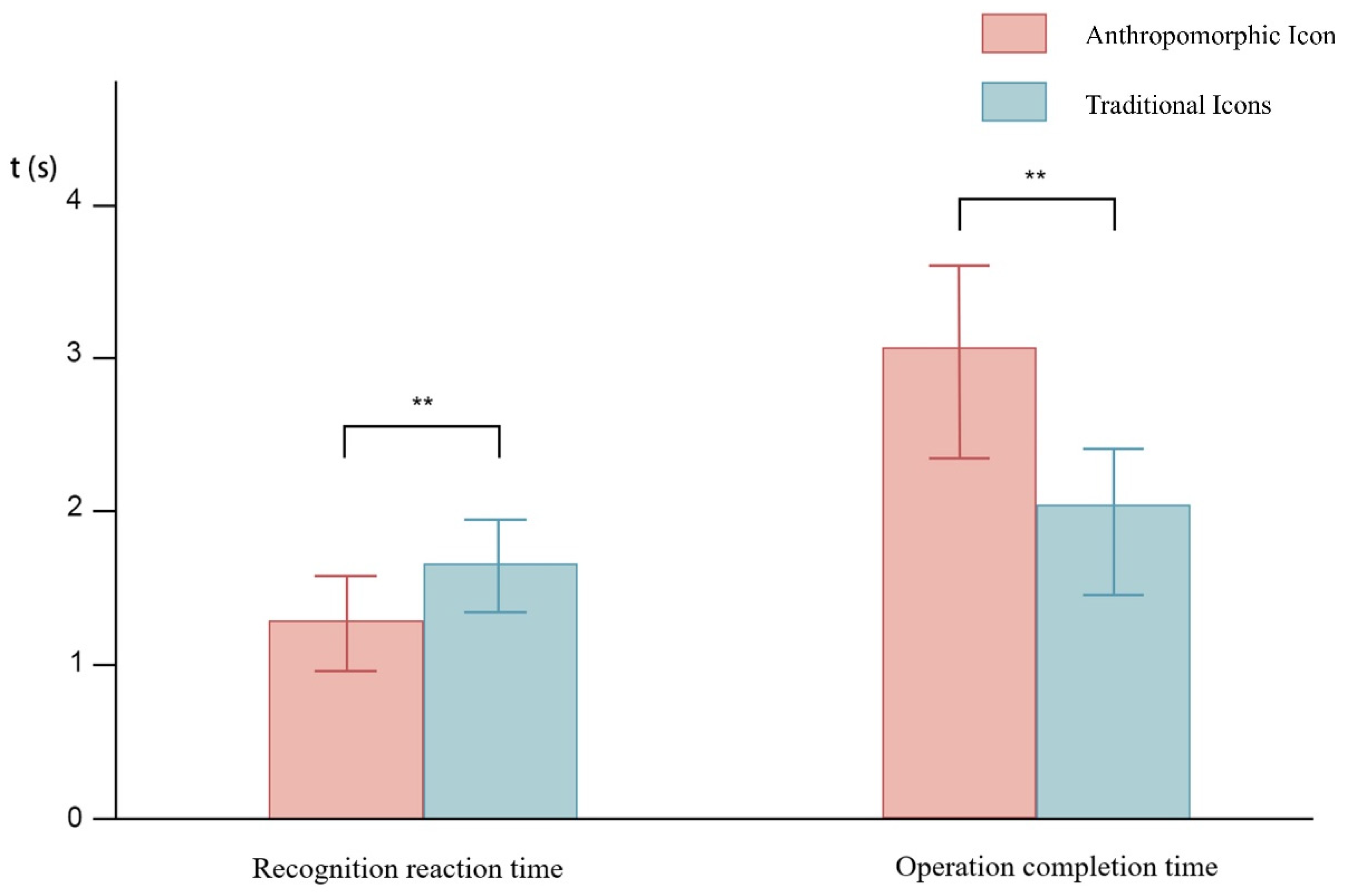
- Test completion time: This was taken as the time from when the icon requiring a quick response appeared to the time at which the subject completed the icon’s corresponding operation;
- (2)
- Recognition reaction time: This was taken as the time from when the icon requiring frequent observation appeared to the time at which the subject selected the meaning of the corresponding icon;
- (3)
- Number of operation errors: After the appearance of an icon that requires a quick response, the subject conducts the corresponding operation. The higher the number of operation errors, the lower the recognition efficiency of the icon and the more ambiguous the meaning;
- (4)
- Number of recognition errors: After an icon that requires frequent attention appears, the subject needs to select the corresponding icon’s meaning. The higher the number of recognition errors, the poorer the recognizability and meaning of the icon;
- (5)
- SUS Usability Scale: This consisted of 10 questions with five evaluation ranges for each question (completely disagree, disagree, average, agree, and strongly agree);
- (6)
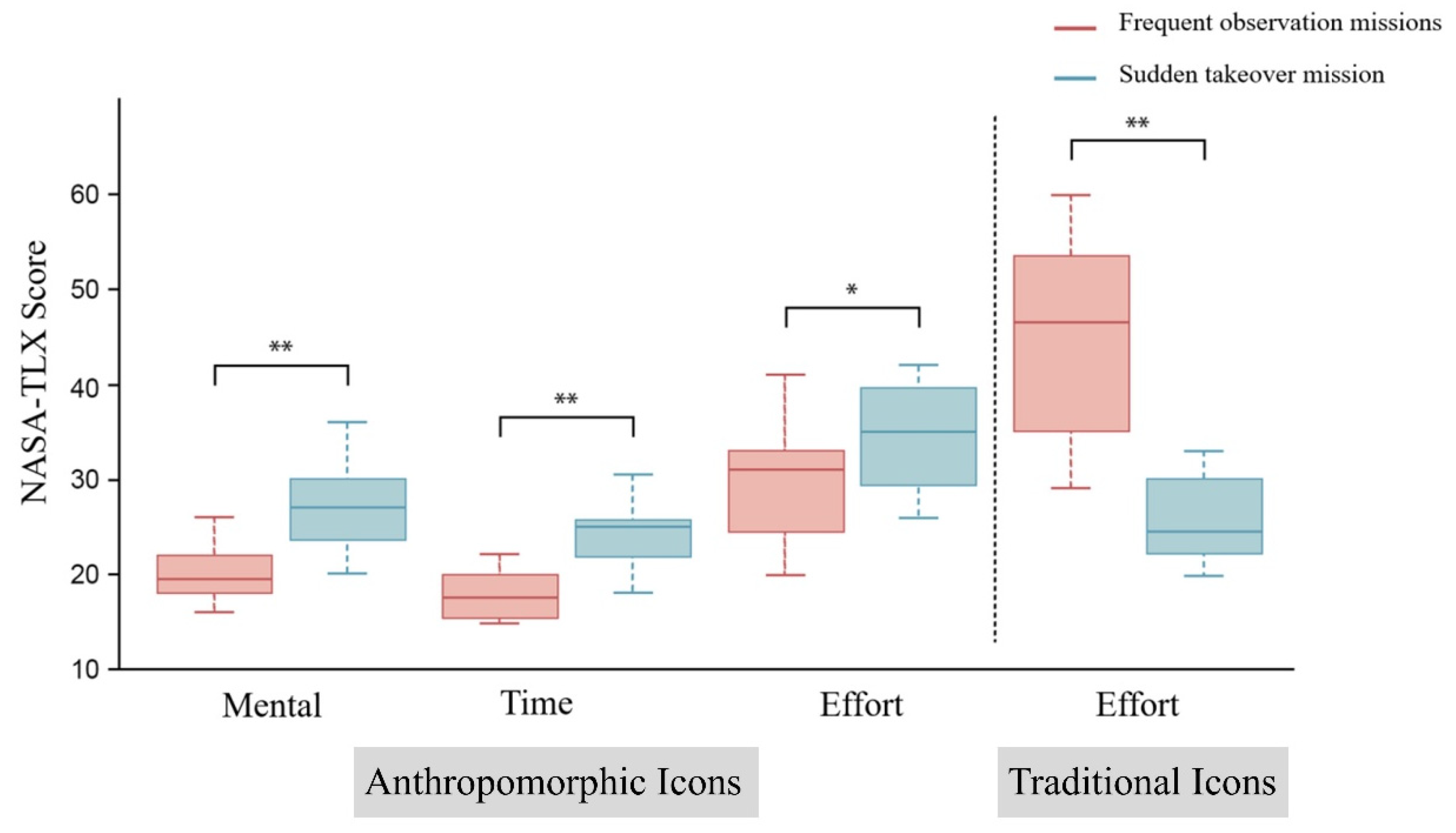
- NASA-TLX Questionnaire: The NASA Task Load Index is a set of processes and criteria developed by NASA’s Ames Research Center for the multidimensional evaluation of workload [31], and it includes subjective measurements in terms of mental demands, physical demands, time demands, effort, performance, and frustration. Each question was rated on a scale ranging from 0 (very low) to 100 (very high).
2.4. Experimental Procedure
- (1)
- First, participants were given an explanation of the purpose and task of the experiment. They were then introduced to the two types of icons and the operations that they correspond to, after which the participants were tested to ensure that they were sufficiently familiar with the meanings of the icons and their corresponding operations to be able to participate in the driving simulation effectively. In addition, a pre-experiment was utilized to ensure that the participants fully understood the flow of the experiment to follow;
- (2)
- The participants were then divided into four groups corresponding to the four combinations of different icon types and driving scenarios. There were 12 people in each group, with an equal number of men and women. The corresponding personal information was recorded;
- (3)
- A high-speed-train driving simulator was used to simulate driving scenarios by playing train-driving videos. Participants were seated in front of the high-speed-train driving simulator, and an iPad was placed in front of the participants. The corresponding icon was selected to present the video playback according to the group of participants;
- (4)
- The participants who needed to frequently observe the scene needed to pay attention to the train-driving environment and the iPad icons at the same time. When an icon in a group of icons began to flash, the respondents needed to select the correct icon meaning from the five possible icon meaning options. After selecting the correct icon meaning, the train simulation continued until all icon meanings were selected. Meanwhile, the participants who needed to react quickly to the scenario had to observe the train-driving video most of the time. When an icon appeared on the iPad, the respondents needed to quickly perform the operation corresponding to the icon on the train simulation driving platform;
- (5)
- After the simulation was completed, the researcher calculated the reaction and completion times and recorded the number of errors;
- (6)
- The researcher arranged for the participants to fill out the questionnaire and then conducted a short post-experiment interview to reflect on and conclude the experiment.
3. Results
3.1. Recognition Reaction Time
3.2. Operation Completion Time
3.3. Number of Recognition Errors and Number of Operation Errors
3.4. SUS Usability
3.5. NASA-TLX Scores
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, D.; Martín, J.C. Research on Passengers’ Preference for High-Speed Railways (HSRs) and High-Speed Trains (HSTs). Sustainability 2022, 14, 1473. [Google Scholar] [CrossRef]
- Shreyas, V.; Bharadwaj, S.N.; Srinidhi, S.; Ankith, K.U.; Rajendra, A.B. Self-driving Cars: An Overview of Various Autonomous Driving Systems. In Advances in Data and Information Sciences; Kolhe, M., Tiwari, S., Trivedi, M., Mishra, K., Eds.; Lecture Notes in Networks and Systems; Springer: Singapore, 2020; Volume 94. [Google Scholar] [CrossRef]
- Alverhed, E.; Hellgren, S.; Isaksson, H.; Olsson, L.; Palmqvist, H.; Flodén, J. Autonomous last-mile delivery robots: A literature review. Eur. Transp. Res. Rev. 2024, 16, 4. [Google Scholar] [CrossRef]
- del Cerro, J.; Cruz Ulloa, C.; Barrientos, A.; de León Rivas, J. Unmanned Aerial Vehicles in Agriculture: A Survey. Agronomy 2021, 11, 203. [Google Scholar] [CrossRef]
- Mateos, L.A.; Wang, W.; Gheneti, B.; Duarte, F.; Ratti, C.; Rus, D. Autonomous Latching System for Robotic Boats. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7933–7939. [Google Scholar] [CrossRef]
- Tan, Z.; Dai, N.; Su, Y.; Zhang, R.; Li, Y.; Wu, D.; Li, S. Human–Machine Interaction in Intelligent and Connected Vehicles: A Review of Status Quo, Issues, and Opportunities. IEEE Trans. Intell. Transp. Syst. 2022, 23, 13954–13975. [Google Scholar] [CrossRef]
- Li, W.; Zhang, M.; Lv, G.; Han, Q.; Gao, Y.; Wang, Y.; Tan, Q.; Zhang, M.; Zhang, Y.; Li, Z. Biomechanical response of the musculoskeletal system to whole body vibration using a seated driver model. Int. J. Ind. Ergon. 2015, 45, 91–97. [Google Scholar] [CrossRef]
- Ansari, S.; Du, H.; Naghdy, F.; Stirling, D. Automatic driver cognitive fatigue detection based on upper body posture variations. Expert Syst. Appl. 2022, 203, 117568. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Castedo, L. Towards the Internet of Smart Trains: A Review on Industrial IoT-Connected Railways. Sensors 2017, 17, 1457. [Google Scholar] [CrossRef]
- Bergamini, L.; Ye, Y.; Scheel, O.; Chen, L.; Hu, C.; Del Pero, L.; Osinski, B.; Grimmett, H.; Ondruska, P. SimNet: Learning Reactive Self-driving Simulations from Real-world Observations. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 5119–5125. [Google Scholar] [CrossRef]
- Chen, H.-Y.W.; Guo, Z.; Harari, R.E. Is text-based user manual enough? A driving simulator study of three training paradigms for conditionally automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2023, 95, 355–368. [Google Scholar] [CrossRef]
- Angkan, P.; Behinaein, B.; Mahmud, Z.; Bhatti, A.; Rodenburg, D.; Hungler, P.; Etemad, A. Multimodal Brain–Computer Interface for In-Vehicle Driver Cognitive Load Measurement: Dataset and Baselines. IEEE Trans. Intell. Transp. Syst. 2024, 25, 5949–5964. [Google Scholar] [CrossRef]
- Huang, K.-C. Effects of computer icons and figure/background area ratios and color combinations on visual search performance on an LCD monitor. Displays 2008, 29, 237–242. [Google Scholar] [CrossRef]
- Lin, H.; Hsieh, Y.-C.; Wu, F.-G. A study on the relationships between different presentation modes of graphical icons and users’ attention. Comput. Hum. Behav. 2016, 63, 218–228. [Google Scholar] [CrossRef]
- Ho, C.-H.; Hou, K.-C. Exploring the attractive factors of app icons. KSII Trans. Internet Inf. Syst. 2015, 9, 2251–2271. [Google Scholar] [CrossRef]
- Aggarwal, P.; McGill, A.L. Is that car smiling at me? Schema congruity as a basis for evaluating anthropomorphized products. J. Consum. Res. 2007, 34, 468–479. [Google Scholar] [CrossRef]
- Duan, D.; Zhu, Y.; Chu, D.; Wu, W. ERP Evidence for the Effects of Anthropomorphic Icons on Attention and Perceptual Decision Making. Int. J. Hum.–Comput. Interact. 2024, 41, 5435–5444. [Google Scholar] [CrossRef]
- Guthrie, S.E. Anthropomorphism: A definition and a theory. In Anthropomorphism, Anecdotes, and Animals; State University of New York Press: Albany, NY, USA, 1997; pp. 50–58. [Google Scholar]
- Cao, Y.; Zhang, Y.; Ding, Y.; Duffy, V.G.; Zhang, X. Is an anthropomorphic app icon more attractive? Evidence from neuroergonomomics. Appl. Ergon. 2021, 97, 103545. [Google Scholar] [CrossRef]
- Daryanto, A.; Alexander, N.; Kartika, G. The anthropomorphic brand logo and its effect on perceived functional performance. J. Brand Manag. 2022, 29, 287–300. [Google Scholar] [CrossRef]
- Cao, Y.; Proctor, R.W.; Ding, Y.; Duffy, V.G.; Zhang, Y.; Zhang, X. Is an anthropomorphic app icon more attractive than a non-anthropomorphic one A case study using multimodal measurement. Int. J. Mob. Commun. 2022, 20, 419–439. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, Y.; Proctor, R.W.; Liu, Y. Emotional experiences of service robots’ anthropomorphic appearance: A multimodal measurement method. Ergonomics 2023, 66, 2039–2057. [Google Scholar] [CrossRef]
- Jing, C.; Dai, H.; Yao, X.; Du, D.; Yu, K.; Yu, D.; Zhi, J. Influence of Multi-Modal Warning Interface on Takeover Efficiency of Autonomous High-Speed Train. Int. J. Environ. Res. Public Health 2023, 20, 322. [Google Scholar] [CrossRef]
- Lv, C.; Cao, D.; Zhao, Y.; Auger, D.J.; Sullman, M.; Wang, H.; Dutka, L.M.; Skrypchuk, L.; Mouzakitis, A. Analysis of autopilot disengagements occurring during autonomous vehicle testing. IEEE/CAA J. Autom. Sin. 2018, 5, 58–68. [Google Scholar] [CrossRef]
- Jing, C.; Shang, C.; Yu, D.; Chen, Y.; Zhi, J. The impact of different AR-HUD virtual warning interfaces on the takeover performance and visual characteristics of autonomous vehicles. Traffic Inj. Prev. 2022, 23, 277–282. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Liang, M.; Niu, K.; Zhang, Y. A Human-Machine Trust Evaluation Method for High-Speed Train Drivers Based on Multi-Modal Physiological Information. Int. J. Hum.–Comput. Interact. 2024, 41, 2659–2676. [Google Scholar] [CrossRef]
- Collins, M.D. Train driver selection: The impact of cognitive ability on train driving performance. Int. J. Sel. Assess. 2024, 32, 249–260. [Google Scholar] [CrossRef]
- Tabai, B.H.; Bagheri, M.; Sadeghi-Firoozabadi, V.; Sze, N. Evaluating the impact of train drivers’ cognitive and demographic characteristics on railway accidents. Saf. Sci. 2018, 110 Pt B, 162–167. [Google Scholar] [CrossRef]
- Lei, S.; Guo, Z.; Tan, X.; Chen, X.; Li, C.; Zou, J.; Cao, S.; Feng, G. Cognitive Abilities Predict Safety Performance: A Study Examining High-Speed Railway Dispatchers. J. Adv. Transp. 2021, 2021, 5538320. [Google Scholar] [CrossRef]
- Du, Y.; Zhi, J.-Y. Impacts of Attention Level on Manual Take-Over Performance in Automatic Driving on High-Speed Railways. Int. J. Hum.–Comput. Interact. 2022, 40, 603–612. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. Adv. Psychol. 1988, 52, 139–183. [Google Scholar]
- Quek, G.; Nemrodov, D.; Rossion, B.; Liu-Shuang, J. Selective attention to faces in a rapid visual stream: Hemispheric differences in enhancement and suppression of category-selective neural activity. J. Cogn. Neurosci. 2018, 30, 393–410. [Google Scholar] [CrossRef]
- Sheikholeslami, S.; Saffarzadeh, M.; Mamdoohi, A.R.; Asadamraji, M. How does a driver feel behind the wheel? An exploratory study of drivers’ emotions and the effect of their sociodemographic background. Accid. Anal. Prev. 2023, 183, 106974. [Google Scholar] [CrossRef]
- Shang, Z.; Wang, Y.; Bi, T. How does fearful emotion affect visual attention? Front. Psychol. 2021, 11, 584412. [Google Scholar] [CrossRef]
- Johannes, N.; Meier, A.; Reinecke, L.; Ehlert, S.; Setiawan, D.N.; Walasek, N.; Dienlin, T.; Buijzen, M.; Veling, H. The relationship between online vigilance and affective well-being in everyday life: Combining smartphone logging with experience sampling. Media Psychol. 2020, 24, 581–605. [Google Scholar] [CrossRef]
- McDougall, S.J.P.; de Bruijin, O.; Curry, M.B. Exploring the effects of icon characteristics on user performance: The role of icon concreteness, complexity, and distinctiveness. J. Exp. Psychol. Appl. 2000, 6, 291–306. [Google Scholar] [CrossRef] [PubMed]
- Shen, Z.; Xue, C.; Wang, H. Effects of Users’ Familiarity With the Objects Depicted in Icons on the Cognitive Performance of Icon Identification. I-Perception 2018, 9, 2041669518780807. [Google Scholar] [CrossRef] [PubMed]
- Tao, D.; Ren, X.; Liu, K.; Mao, Q.; Cai, J.; Wang, H. Effects of color scheme and visual fatigue on visual search performance and perceptions under vibration conditions. Displays 2024, 82, 102667. [Google Scholar] [CrossRef]
- Fox, E.; Russo, R.; Bowles, R.; Dutton, K. Do threatening stimuli draw or hold visual attention in subclinical anxiety? J. Exp. Psychol. Gen. 2001, 130, 681–700. [Google Scholar] [CrossRef]
- Koster, E.H.W.; Verschuere, B.; Burssens, B.; Custers, R.; Crombez, G. Attention for emotional faces under restricted awareness revisited: Do emotional faces automatically attract attention? Emotion 2007, 7, 285–295. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Icon Type | Mean ± SD | F | p | |
|---|---|---|---|---|
| Recognition reaction time for frequent observation tasks | Traditional Icons | 1.65 ± 0.30 | 8.968 | 0.007 ** |
| Anthropomorphic Icons | 1.28 ± 0.31 | |||
| Operational completion time for sudden takeover tasks | Traditional Icons | 2.04 ± 0.37 | 31.999 | 0.000 ** |
| Anthropomorphic Icons | 3.07 ± 0.51 |
| Type of Task | Median | Z | p | |
|---|---|---|---|---|
| Anthropomorphic Icons SUS Score | Frequent observation missions | 80.000 | −3.799 | 0.000 ** |
| Sudden takeover mission | 72.500 | |||
| Traditional Icons SUS Score | Frequent observation missions | 73.750 | −3.356 | 0.001 ** |
| Sudden takeover mission | 80.000 | |||
| Anthropomorphic Icons NASA-TLX Brain Score | Frequent observation missions | 19.500 | −3.454 | 0.001 ** |
| Sudden takeover mission | 27.000 | |||
| Anthropomorphic Icons NASA-TLX Time Score | Frequent observation missions | 17.500 | −3.775 | 0.000 ** |
| Sudden takeover mission | 25.000 | |||
| Anthropomorphic Icons NASA-TLX Effort Score | Frequent observation missions | 31.000 | −2.115 | 0.034 * |
| Sudden takeover mission | 35.000 | |||
| Traditional Icons NASA-TLX Effort Score | Frequent observation missions | 46.500 | −3.907 | 0.000 ** |
| Sudden takeover mission | 25.500 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Zhi, J. Can Anthropomorphic Interfaces Improve the Ergonomics and Safety Performance of Human–Machine Collaboration in Multitasking Scenarios?—An Example of Human–Machine Co-Driving in High-Speed Trains. Biomimetics 2025, 10, 307. https://doi.org/10.3390/biomimetics10050307
Jiang Y, Zhi J. Can Anthropomorphic Interfaces Improve the Ergonomics and Safety Performance of Human–Machine Collaboration in Multitasking Scenarios?—An Example of Human–Machine Co-Driving in High-Speed Trains. Biomimetics. 2025; 10(5):307. https://doi.org/10.3390/biomimetics10050307
Chicago/Turabian StyleJiang, Yunan, and Jinyi Zhi. 2025. "Can Anthropomorphic Interfaces Improve the Ergonomics and Safety Performance of Human–Machine Collaboration in Multitasking Scenarios?—An Example of Human–Machine Co-Driving in High-Speed Trains" Biomimetics 10, no. 5: 307. https://doi.org/10.3390/biomimetics10050307
APA StyleJiang, Y., & Zhi, J. (2025). Can Anthropomorphic Interfaces Improve the Ergonomics and Safety Performance of Human–Machine Collaboration in Multitasking Scenarios?—An Example of Human–Machine Co-Driving in High-Speed Trains. Biomimetics, 10(5), 307. https://doi.org/10.3390/biomimetics10050307