
DEM Study and Field Experiments on Coupling Bionic Subsoilers


Abstract
1. Introduction
2. Materials and Methods
2.1. Design of Coupling Bionic Subsoiler
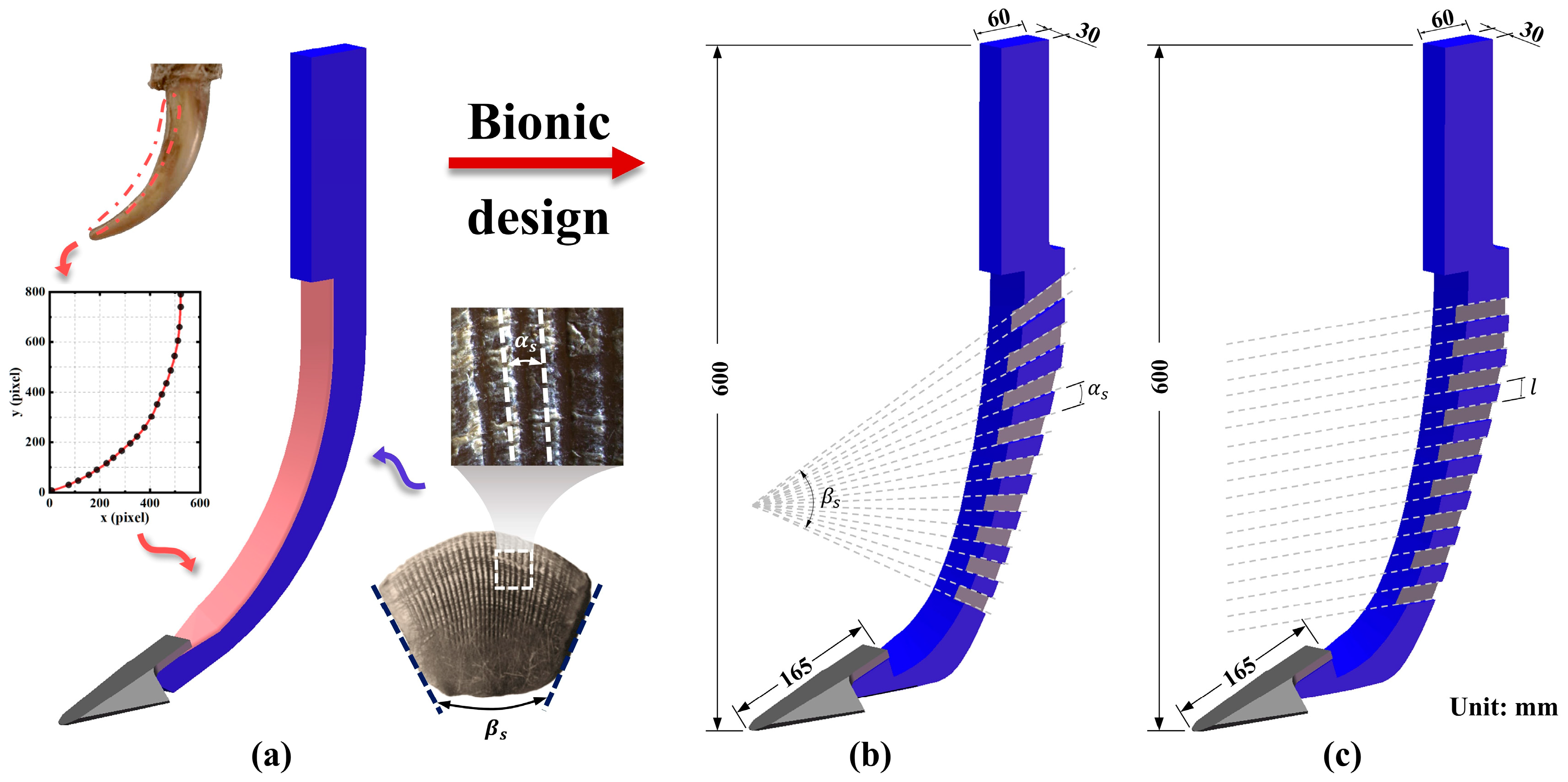
2.1.1. Bionic Structure Extraction
2.1.2. Three-Dimensional Modeling of Coupling Bionic Subsoiler
2.2. Discrete Element Simulation Modeling
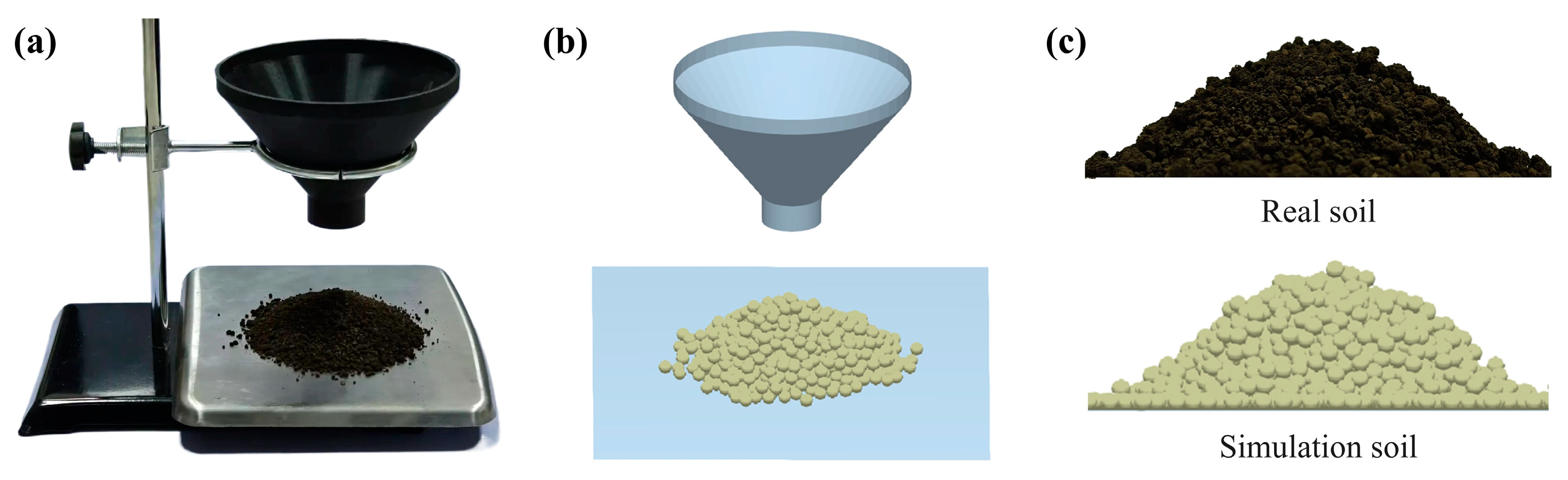
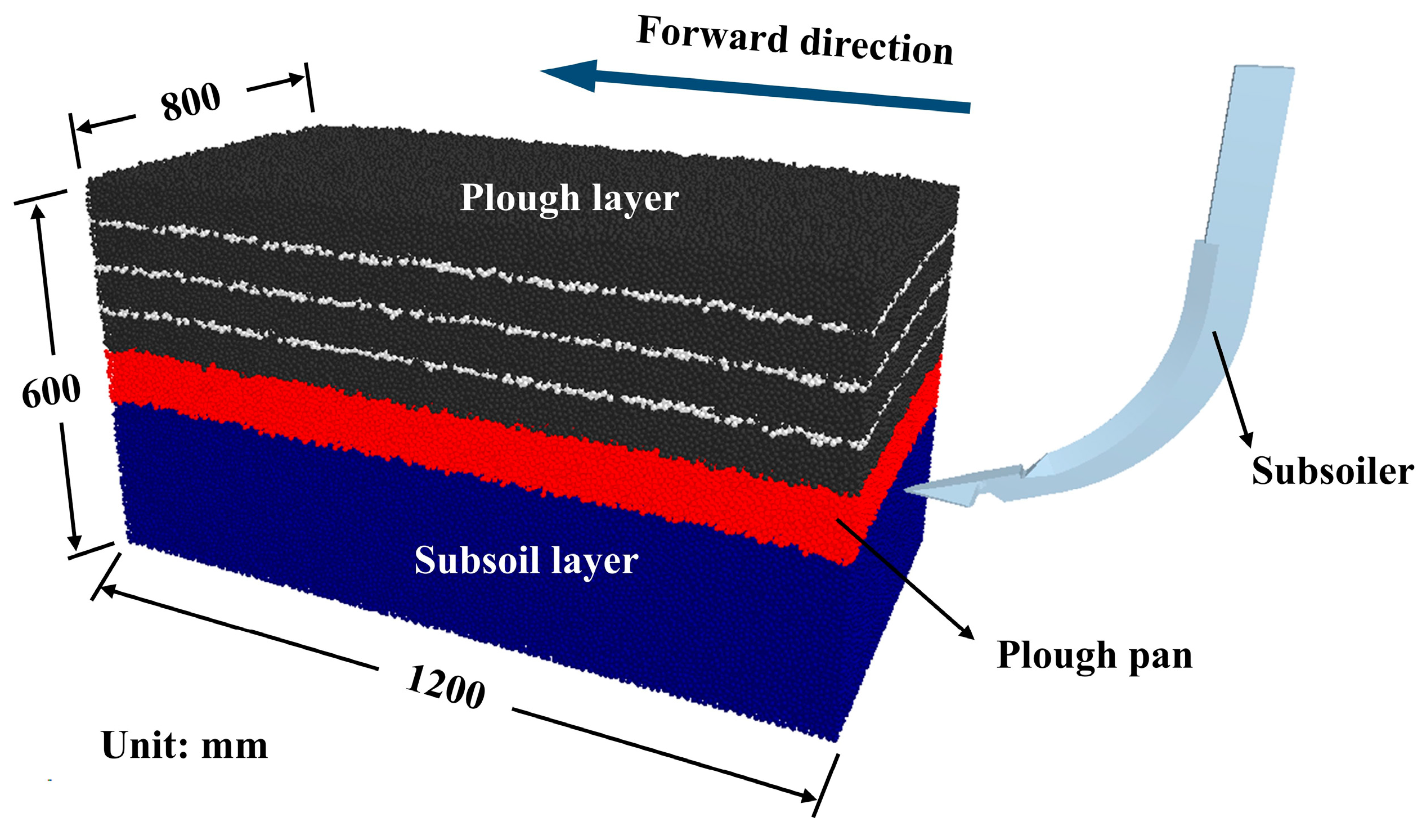
2.2.1. Simulation Parameters and Soil Modeling
2.2.2. Working Parameters and Performance Evaluation Indexes of Subsoiler in DEM Analysis
2.2.3. Performance Evaluation Indexes of Subsoiler in DEM Analysis
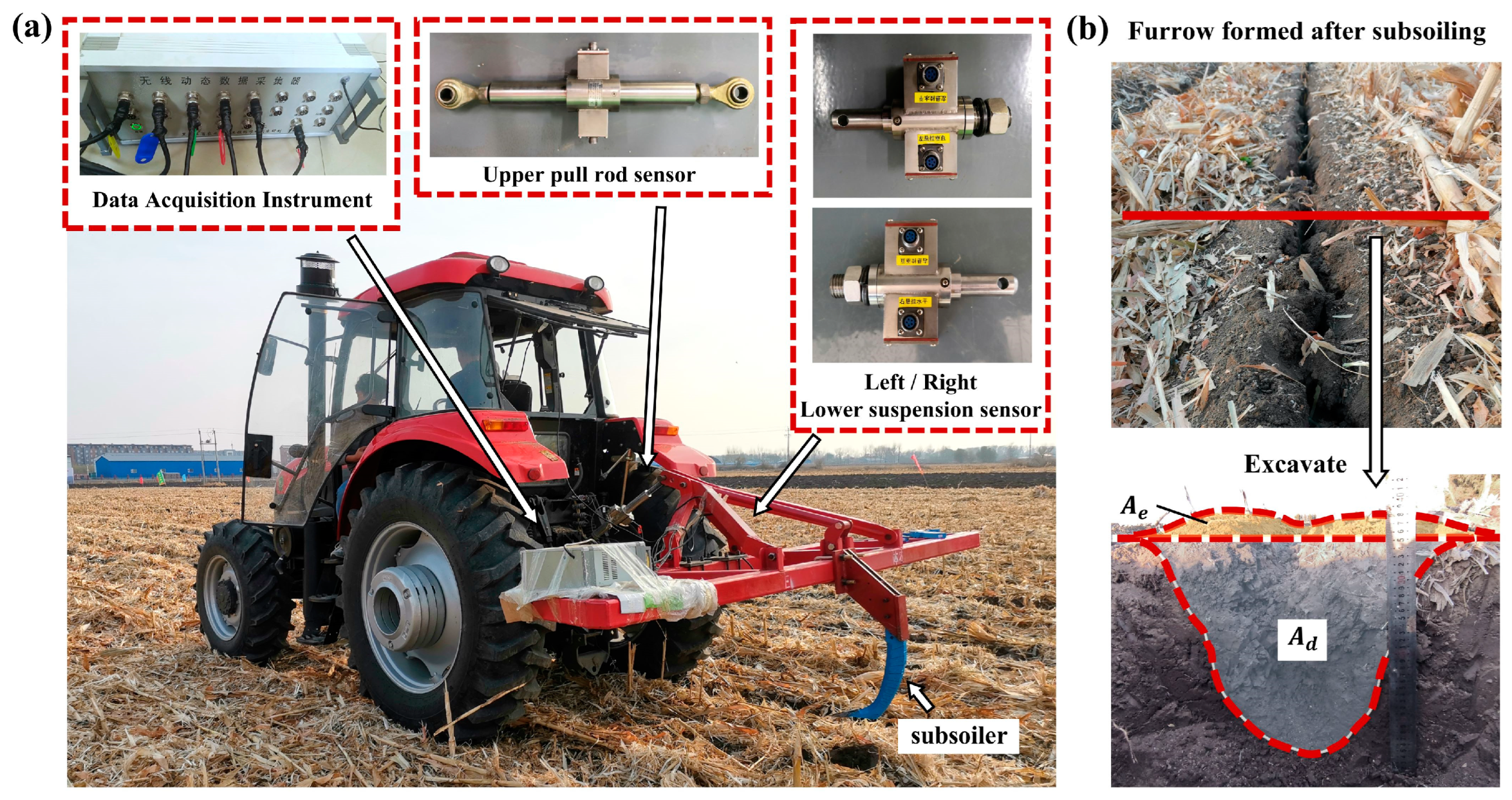
2.3. Field Experiments
3. Results and Discussion
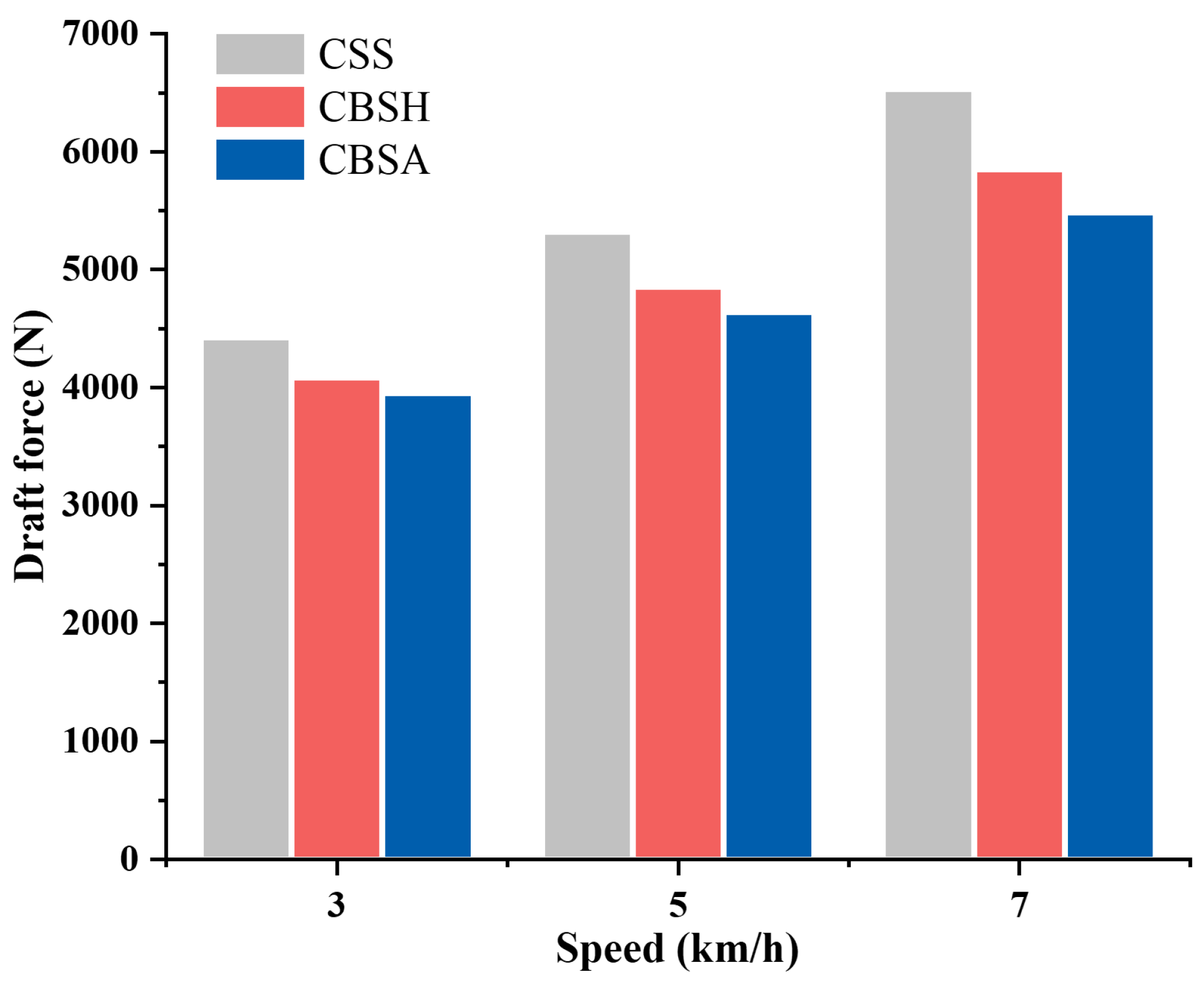
3.1. Draft Force of Subsoiler in DEM Simulation
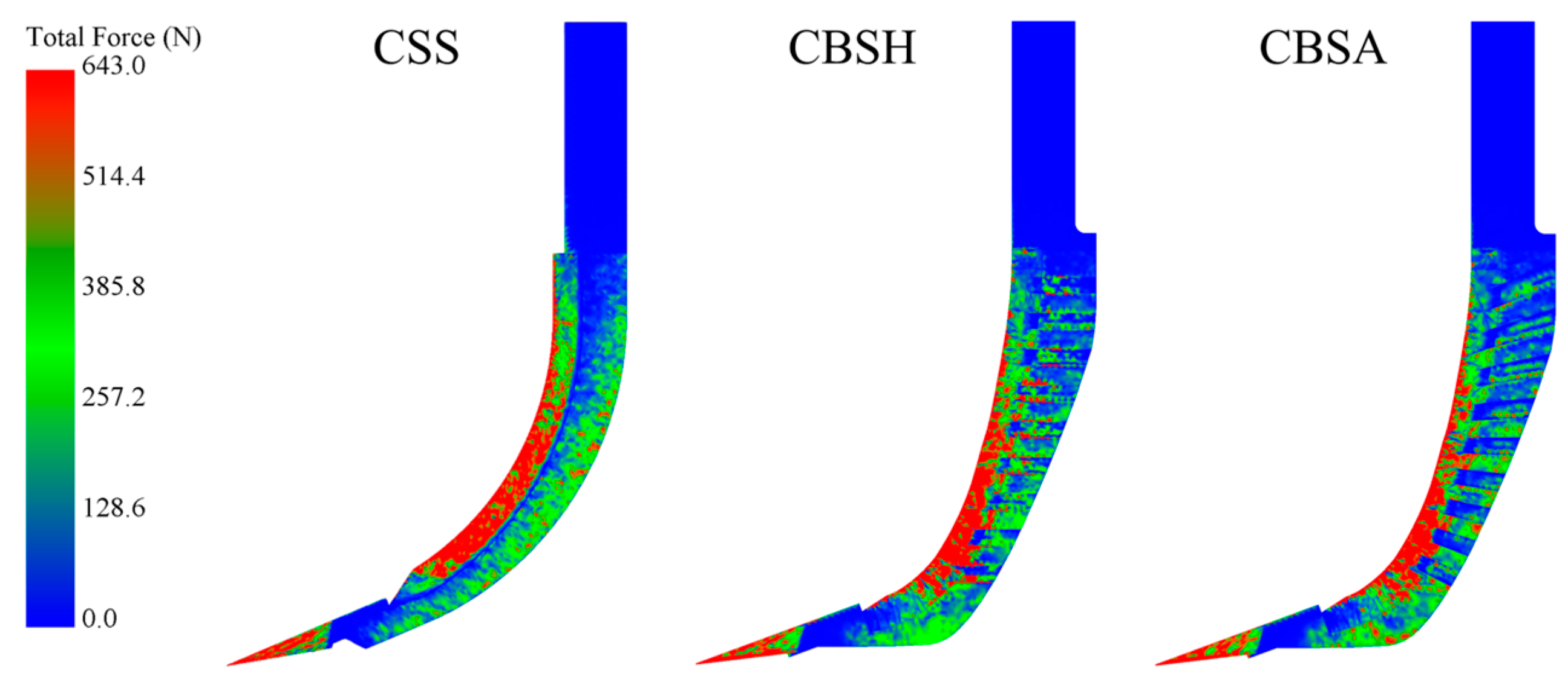
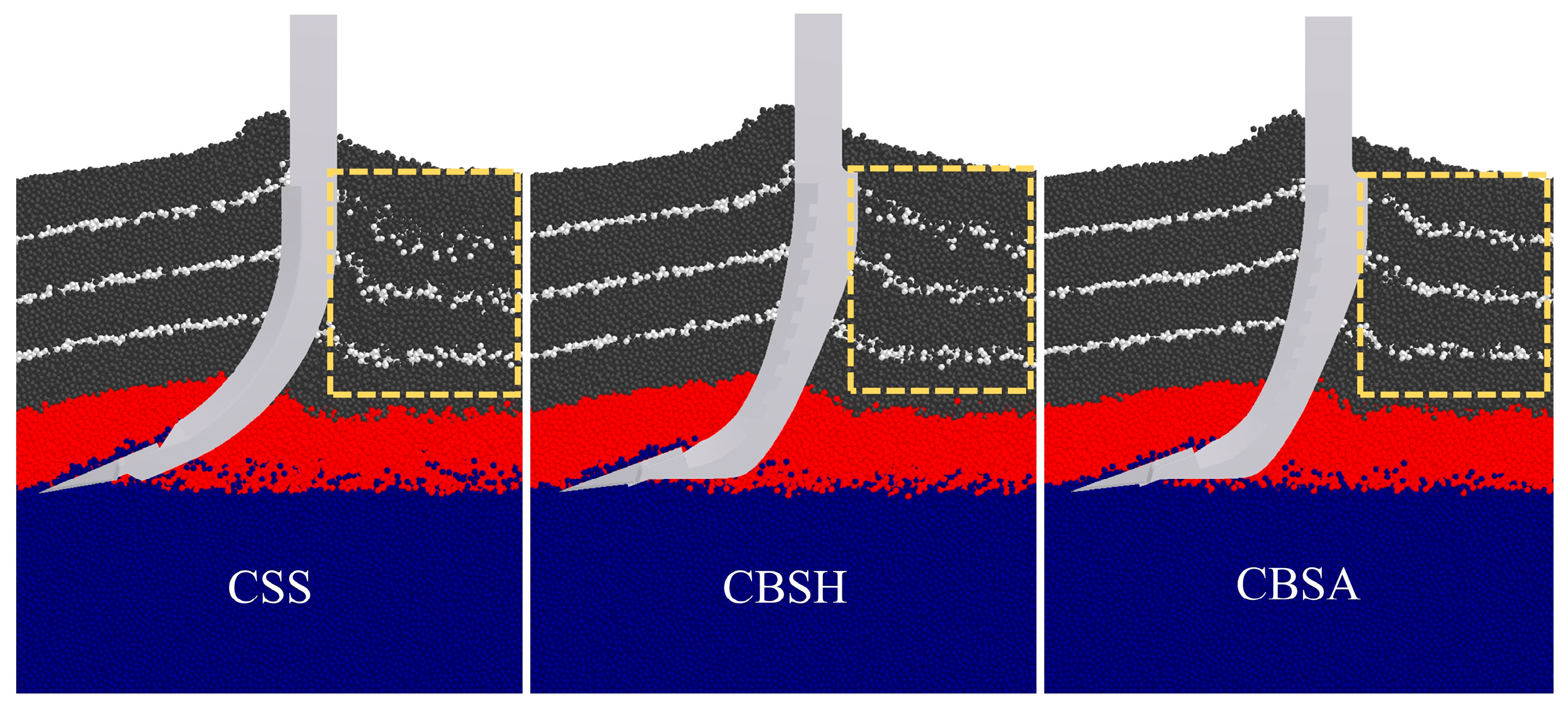
3.2. Soil Disturbance of Subsoiler in DEM Simulation
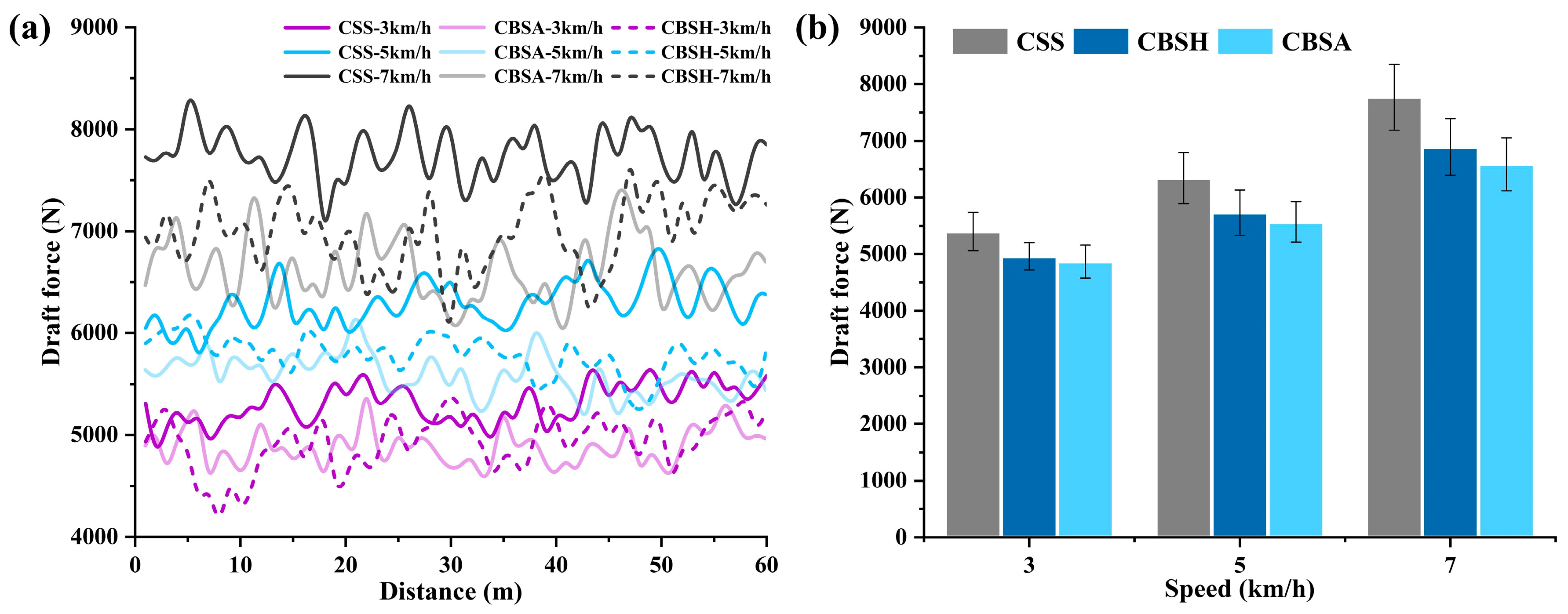
3.3. Field Experiment Results and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tian, S.Z.; Ning, T.Y.; Wang, Y.; Liu, Z.; Li, G.; Li, Z.J.; Lal, R. Crop yield and soil carbon responses to tillage method changes in North China. Soil Tillage Res. 2016, 163, 207–213. [Google Scholar] [CrossRef]
- Wang, Y.X.; Chen, S.P.; Zhang, D.X.; Yang, L.; Cui, T.; Jing, H.R.; Li, Y.H. Effects of subsoiling depth, period interval and combined tillage practice on soil properties and yield in the Huang-Huai-Hai Plain, China. J. Integr. Agric. 2020, 19, 1596–1608. [Google Scholar] [CrossRef]
- Yin, B.Z.; Hu, Z.H.; Wang, Y.D.; Zhao, J.; Pan, Z.H.; Zhen, W.C. Effects of optimized subsoiling tillage on field water conservation and summer maize (Zea mays L.) yield in the North China Plain. Agric. Water Manag. 2021, 247, 106732. [Google Scholar] [CrossRef]
- Lu, X.L.; Lu, X.N. Tillage and crop residue effects on the energy consumption, input-output costs and greenhouse gas emissions of maize crops. Nutr. Cycl. Agroecosyst. 2017, 108, 323–337. [Google Scholar] [CrossRef]
- Lou, S.Y.; He, J.; Li, H.W.; Wang, Q.J.; Lu, C.Y.; Liu, W.Z.; Liu, P.; Zhang, Z.G.; Li, H. Current Knowledge and Future Directions for Improving Subsoiling Quality and Reducing Energy Consumption in Conservation Fields. Agriculture 2021, 11, 575. [Google Scholar] [CrossRef]
- Ren, L.Q.; Han, Z.W.; Li, J.J.; Tong, J. Effects of non-smooth characteristics on bionic bulldozer blades in resistance reduction against soil. J. Terramech. 2002, 39, 221–230. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, D.; Yang, L.; Cui, T.; Jing, H.; Zhong, X. Modeling the interaction of soil and a vibrating subsoiler using the discrete element method. Comput. Electron. Agric. 2020, 174, 105518. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, Z.H.; Yan, B.P.; Yuan, S.; Zhang, F. Design and evaluation of bio-inspired electro-osmosis system for reducing soil adhesion on agricultural equipment. Soil Tillage Res. 2025, 251, 106521. [Google Scholar] [CrossRef]
- Barzegar, M.; Hashemi, S.J.; Nazokdast, H.; Karimi, R. Evaluating the draft force and soil-tool adhesion of a UHMW-PE coated furrower. Soil Tillage Res. 2016, 163, 160–167. [Google Scholar] [CrossRef]
- Xu, Z.; Qi, H.; Gao, P.; Wang, S.; Liu, X.; Ma, Y. Biomimetic Design of Soil-Engaging Components: A Review. Biomimetics 2024, 9, 358. [Google Scholar] [CrossRef]
- Zhang, L.; Zhai, Y.B.; Chen, J.N.; Zhang, Z.E.; Huang, S.Z. Optimization design and performance study of a subsoiler underlying the tea garden subsoiling mechanism based on bionics and EDEM. Soil Tillage Res. 2022, 220, 105375. [Google Scholar] [CrossRef]
- Song, W.; Jiang, X.H.; Li, L.K.; Ren, L.L.; Tong, J. Increasing the width of disturbance of plough pan with bionic inspired subsoilers. Soil Tillage Res. 2022, 220, 105356. [Google Scholar] [CrossRef]
- Wu, B.G.; Zhang, R.Z.; Hou, P.F.; Tong, J.; Zhou, D.Y.; Yu, H.Y.; Zhang, Q.; Zhang, J.S.; Xin, Y.L. Bionic Nonsmooth Drag Reduction Mathematical Model Construction and Subsoiling Verification. Appl. Bionics Biomech. 2021, 2021, 13. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.M.; Li, N.; Ma, Y.H.; Tong, J.; Pfleging, W.; Sun, J.Y. Field experiments evaluating a biomimetic shark-inspired (BioS) subsoiler for tillage resistance reduction. Soil Tillage Res. 2020, 196, 104432. [Google Scholar] [CrossRef]
- Ren, L.Q.; Liang, Y.H. Biological couplings: Classification and characteristic rules. Sci. China Ser. E-Technol. Sci. 2009, 52, 2791–2800. [Google Scholar] [CrossRef]
- Gao, K.; Li, M.; Dong, B.; Sun, Y.H.; Sun, Y.; Liu, J. Bionic coupling polycrystalline diamond composite bit. Petroleum Explor. Dev. 2014, 41, 533–537. [Google Scholar] [CrossRef]
- Wang, Y.M.; Xue, W.L.; Ma, Y.H.; Tong, J.; Liu, X.P.; Sun, J.Y. DEM and soil bin study on a biomimetic disc furrow opener. Comput. Electron. Agric. 2019, 156, 209–216. [Google Scholar] [CrossRef]
- Liu, G.M.; Han, X.K.; Wang, Z.Y.; Wang, K.; Zhang, Z.S.; Duan, Z.A. Viscosity Reduction and Drag Reduction Performance Analysis of Bionic Excavator Buckets Based on Discrete Element Method. Biomimetics 2024, 9, 686. [Google Scholar] [CrossRef]
- Shmulevich, I.; Asaf, Z.; Rubinstein, D. Interaction between soil and a wide cutting blade using the discrete element method. Soil Tillage Res. 2007, 97, 37–50. [Google Scholar] [CrossRef]
- Zhao, H.B.; Li, H.W.; Ma, S.C.; He, J.; Wang, Q.J.; Lu, C.Y.; Zheng, Z.Q.; Zhang, C. The effect of various edge-curve types of plain-straight blades for strip tillage seeding on torque and soil disturbance using DEM. Soil Tillage Res. 2020, 202, 104674. [Google Scholar] [CrossRef]
- Awuah, E.; Zhou, J.; Liang, Z.; Aikins, K.A.; Gbenontin, B.V.; Mecha, P.; Makange, N.R. Parametric analysis and numerical optimisation of Jerusalem artichoke vibrating digging shovel using discrete element method. Soil Tillage Res. 2022, 219, 105344. [Google Scholar] [CrossRef]
- Li, J.W.; Li, X.Y.; Hu, B.; Gu, T.L.; Wang, Z.J.; Wang, H.L. Analysis of the resistance reduction mechanism of potato bionic digging shovels in clay and heavy soil conditions. Comput. Electron. Agric. 2023, 214, 108315. [Google Scholar] [CrossRef]
- Li, J.G.; Liu, X.M.; Zou, L.L.; Yuan, J.; Du, S. Analysis of the interaction between end-effectors, soil and asparagus during a harvesting process based on discrete element method. Biosyst. Eng. 2020, 196, 127–144. [Google Scholar] [CrossRef]
- Chen, M.D.; Liu, X.T.; Hu, P.X.; Zhai, X.T.; Han, Z.L.; Shi, Y.L.; Zhu, W.J.; Wang, D.W.; He, X.N.; Shang, S.Q. Study on rotor vibration potato-soil separation device for potato harvester using DEM-MBD coupling simulation. Comput. Electron. Agric. 2024, 218, 108638. [Google Scholar] [CrossRef]
- Wang, X.Z.; Zhang, S.; Pan, H.B.; Zheng, Z.Q.; Huang, Y.X.; Zhu, R.X. Effect of soil particle size on soil-subsoiler interactions using the discrete element method simulations. Biosyst. Eng. 2019, 182, 138–150. [Google Scholar] [CrossRef]
- Guan, C.S.; Fu, J.J.; Xu, L.; Jiang, X.Z.; Wang, S.L.; Cui, Z.C. Study on the reduction of soil adhesion and tillage force of bionic cutter teeth in secondary soil crushing. Biosyst. Eng. 2022, 213, 133–147. [Google Scholar] [CrossRef]
- Wang, B.; Yang, W.; Sherman, V.R.; Meyers, M.A. Pangolin armor: Overlapping, structure, and mechanical properties of the keratinous scales. Acta Biomater. 2016, 41, 60–74. [Google Scholar] [CrossRef]
- Zhang, F.B.; Luo, Z.T.; Zheng, E.L.; Han, L.; Qian, J.; Yao, H.P.; Shi, Y.Y.; Wang, X.C. Imitating pangolin scale structure for reducing adhesion and resistance of rotary tillage in wet-adhesive soil. Soil Tillage Res. 2025, 245, 106306. [Google Scholar] [CrossRef]
- Li, B.; Chen, Y.; Chen, J. Comparison of two subsoiler designs using the discrete element method (DEM). Trans. ASABE 2018, 61, 1529–1537. [Google Scholar] [CrossRef]
- Tong, J.; Jiang, X.H.; Wang, Y.M.; Ma, Y.H.; Li, J.W.; Sun, J.Y. Tillage force and disturbance characteristics of different geometric-shaped subsoilers via DEM. Adv. Manuf. 2020, 8, 392–404. [Google Scholar] [CrossRef]
- Wang, S.; Liu, X.T.; Tong, T.J.; Xu, Z.H.; Ma, Y.H. Parameter Optimization and DEM Simulation of Bionic Sweep with Lower Abrasive Wear Characteristics. Biomimetics 2023, 8, 201. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.B.; Huang, Y.X.; Liu, Z.D.; Liu, W.Z.; Zheng, Z.Q. Applications of Discrete Element Method in the Research of Agricultural Machinery: A Review. Agriculture 2021, 11, 425. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling (DEM) of tillage: Accounting for soil cohesion and adhesion. Biosyst. Eng. 2015, 129, 298–306. [Google Scholar] [CrossRef]
- Mudarisov, S.; Farkhutdinov, I.; Khamaletdinov, R.; Khasanov, E.; Mukhametdinov, A. Evaluation of the significance of the contact model particle parameters in the modelling of wet soils by the discrete element method. Soil Tillage Res. 2022, 215, 105228. [Google Scholar] [CrossRef]
- Zhao, J.L.; Lu, Y.; Wang, X.G.; Zhuang, J.; Han, Z.W. A bionic profiling-energy storage device based on MBD-DEM coupled simulation optimization reducing the energy consumption of deep loosening. Soil Tillage Res. 2023, 234, 105824. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling of tillage: Determination of a suitable contact model and parameters for a cohesionless soil. Biosyst. Eng. 2014, 121, 105–117. [Google Scholar] [CrossRef]
- Zhang, B.X.; Jia, Y.F.; Fan, H.M.; Guo, C.J.; Fu, J.; Li, S.; Li, M.Y.; Liu, B.; Ma, R.M. Soil compaction due to agricultural machinery impact: A systematic review. Land Degrad. Dev. 2024, 35, 3256–3273. [Google Scholar] [CrossRef]
- Zhang, L.; Zhai, Y.B.; Wu, C.Y.; Huang, S.Z.; Zhang, Z. Modeling the interaction between a new four-bar subsoiling mechanism and red soil using the improved differential evolution algorithm and DEM. Comput. Electron. Agric. 2023, 208, 107783. [Google Scholar] [CrossRef]
- Jiang, X.H.; Tong, J.; Ma, Y.H.; Sun, J.Y. Development and verification of a mathematical model for the specific resistance of a curved subsoiler. Biosyst. Eng. 2020, 190, 107–119. [Google Scholar] [CrossRef]
- Aikins, K.A.; Antille, D.L.; Ucgul, M.; Barr, J.B.; Jensen, T.A.; Desbiolles, J.M.A. Analysis of effects of operating speed and depth on bentleg opener performance in cohesive soil using the discrete element method. Comput. Electron. Agric. 2021, 187, 106236. [Google Scholar] [CrossRef]
- Wu, P.; Zhang, X.R.; Zeng, Z.W.; Chen, Y. DEM simulation of subsoiling for soil disturbance as affected by soil layering and working speed. Smart Agric. Technol. 2024, 7, 100385. [Google Scholar] [CrossRef]
- He, C.B.; You, Y.; Wang, D.C.; Wang, G.H.; Lu, D.H.; Kaji, J.M.T. The effect of tine geometry during vertical movement on soil penetration resistance using finite element analysis. Comput. Electron. Agric. 2016, 130, 97–108. [Google Scholar] [CrossRef]
- Godwin, R.J.; O’Dogherty, M.J. Integrated soil tillage force prediction models. J. Terramech. 2007, 44, 3–14. [Google Scholar] [CrossRef]
- Liu, X.T.; Gao, P.; Qi, H.Y.; Zhang, Q.F.; Guo, M.Z.; Ma, Y.H. Interaction Mechanisms between Blades and Maize Root-Soil Composites as Affected by Key Factors: An Experimental Analysis. Agriculture 2024, 14, 1179. [Google Scholar] [CrossRef]
- Ibrahmi, A.; Bentaher, H.; Hamza, E.; Maalej, A.; Mouazen, A.M. Study the effect of tool geometry and operational conditions on mouldboard plough forces and energy requirement: Part 2. Experimental validation with soil bin test. Comput. Electron. Agric. 2015, 117, 268–275. [Google Scholar] [CrossRef]
- Abbaspour-Gilandeh, Y.; Fazeli, M.; Roshanianfard, A.; Hernández-Hernández, J.L.; Penna, A.F.; Herrera-Miranda, I. Effect of Different Working and Tool Parameters on Performance of Several Types of Cultivators. Agriculture 2020, 10, 145. [Google Scholar] [CrossRef]
- Barr, J.B.; Desbiolles, J.M.A.; Fielke, J.M. Minimising soil disturbance and reaction forces for high speed sowing using bentleg furrow openers. Biosyst. Eng. 2016, 151, 53–64. [Google Scholar] [CrossRef]
- Wang, X.Z.; Fu, Z.L.; Zhang, Q.K.; Huang, Y.X. Short-term subsoiling effects with different wing mounting heights before winter wheat on soil properties and wheat growth in Northwest China. Soil Tillage Res. 2021, 213, 105151. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Plough Layer | Plough Pan | Subsoil Layer |
|---|---|---|---|
| Soil particle radius (mm) | 4 | 4 | 4 |
| Soil density (kg/m3) | 2580 | 2630 | 2610 |
| Poisson’s ratio of soil | 0.30 | 0.33 | 0.31 |
| Shear modulus of soil (Pa) | 1 × 108 | 1.02 × 108 | 1.05 × 108 |
| Soil particle model surface energy (J/m2) | 2.79 | 4.52 | 3.25 |
| Number of soil particle models | 405,723 | 138,335 | 418,013 |
| Coefficient of restitution, soil–soil | 0.65 | 0.62 | 0.68 |
| Coefficient of static friction, soil–soil | 0.50 | 0.51 | 0.52 |
| Coefficient of rolling friction, soil–soil | 0.07 | 0.11 | 0.12 |
| Density of steel (kg/m3) | 7850 | 7850 | 7850 |
| Poisson’s ratio of steel | 0.30 | 0.30 | 0.30 |
| Shear modulus of steel (Pa) | 7.9 × 1010 | 7.9 × 1010 | 7.9 × 1010 |
| Coefficient of restitution, soil–steel | 0.29 | 0.26 | 0.27 |
| Coefficient of static friction, soil–steel | 0.57 | 0.49 | 0.50 |
| Coefficient of rolling friction, soil–steel | 0.3 | 0.28 | 0.27 |
| Parameters | Speed | CSS | CBSH | CBSA |
|---|---|---|---|---|
| (mm2) | 3 km/h | 72,930 a | 69,583 b | 69,809 c |
| 5 km/h | 79,953 a | 75,309 b | 75,973 c | |
| 7 km/h | 83,199 a | 78,600 b | 76,706 c | |
| (mm2) | 3 km/h | 12,976 a | 11,955 b | 11,720 b |
| 5 km/h | 13,836 a | 12,470 b | 12,086 c | |
| 7 km/h | 14,907 a | 13,167 b | 12,470 c |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Qi, H.; Wang, L.; Wang, S.; Liu, X.; Ma, Y. DEM Study and Field Experiments on Coupling Bionic Subsoilers. Biomimetics 2025, 10, 306. https://doi.org/10.3390/biomimetics10050306
Xu Z, Qi H, Wang L, Wang S, Liu X, Ma Y. DEM Study and Field Experiments on Coupling Bionic Subsoilers. Biomimetics. 2025; 10(5):306. https://doi.org/10.3390/biomimetics10050306
Chicago/Turabian StyleXu, Zihe, Hongyan Qi, Lidong Wang, Shuo Wang, Xuanting Liu, and Yunhai Ma. 2025. "DEM Study and Field Experiments on Coupling Bionic Subsoilers" Biomimetics 10, no. 5: 306. https://doi.org/10.3390/biomimetics10050306
APA StyleXu, Z., Qi, H., Wang, L., Wang, S., Liu, X., & Ma, Y. (2025). DEM Study and Field Experiments on Coupling Bionic Subsoilers. Biomimetics, 10(5), 306. https://doi.org/10.3390/biomimetics10050306