




Improved Anthropomorphic Robotic Hand for Architecture and Construction: Integrating Prestressed Mechanisms with Self-Healing Elastomers

Abstract
1. Introduction
1.1. Research Background
1.2. Related Work and Research Gaps
1.3. Study Objectives
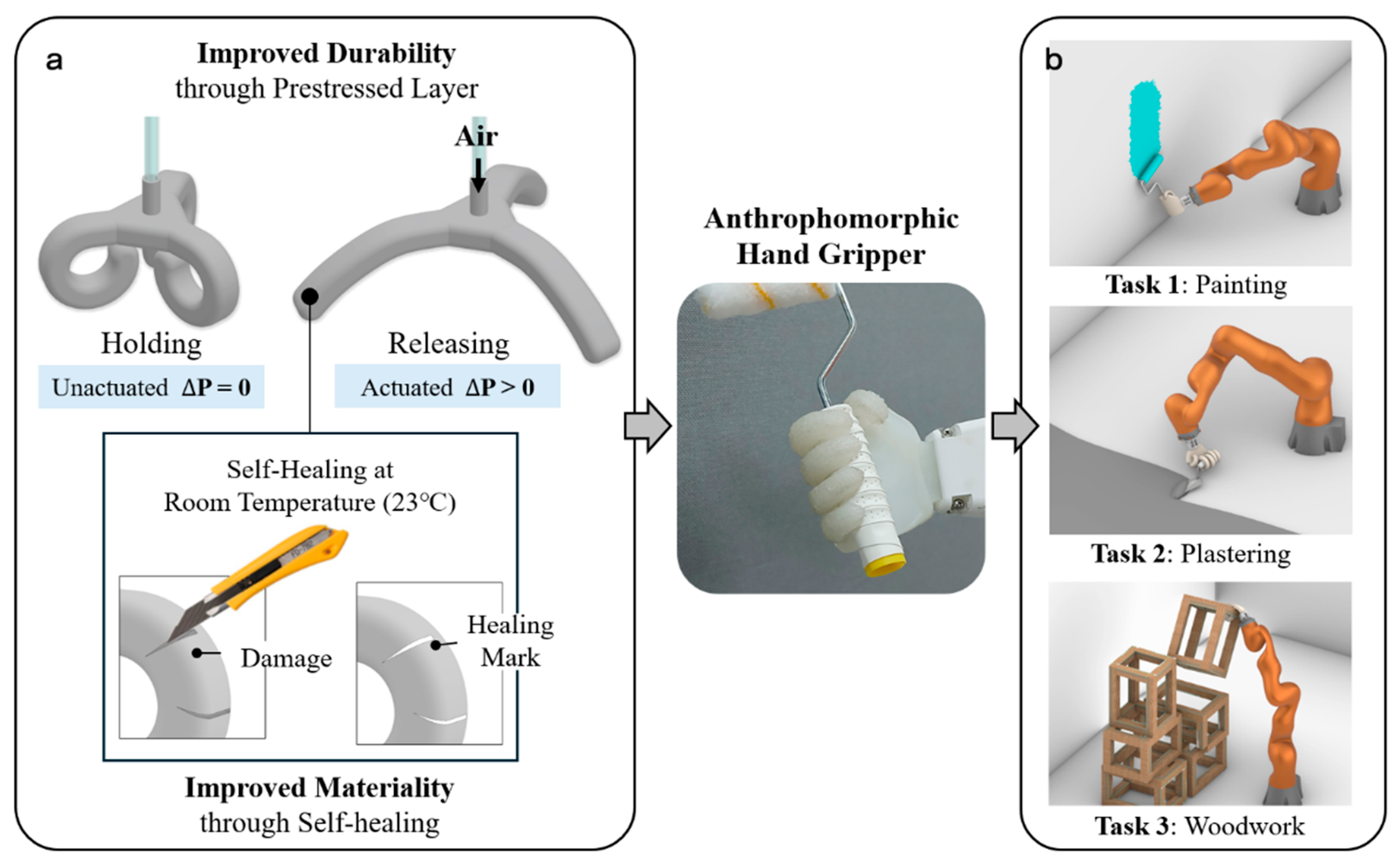
- Design of a biomimetic soft-robot mechanism adaptive to building construction: Development of an anthropomorphic robotic gripper specialized for long-duration holding tasks in construction, including tool grasping, stabilization of irregular objects, and adaptation to dynamic on-site environments.
- Integration of a novel self-healing material: Utilization of advanced self-healing materials to fabricate soft robotic fingers, ensuring durability and the ability to self-repair under mechanical stress or damage.
- Performance evaluation and practical demonstration: Testing of the robotic hand’s performance and validation of its utility in executing building construction tasks.
2. Materials and Methods
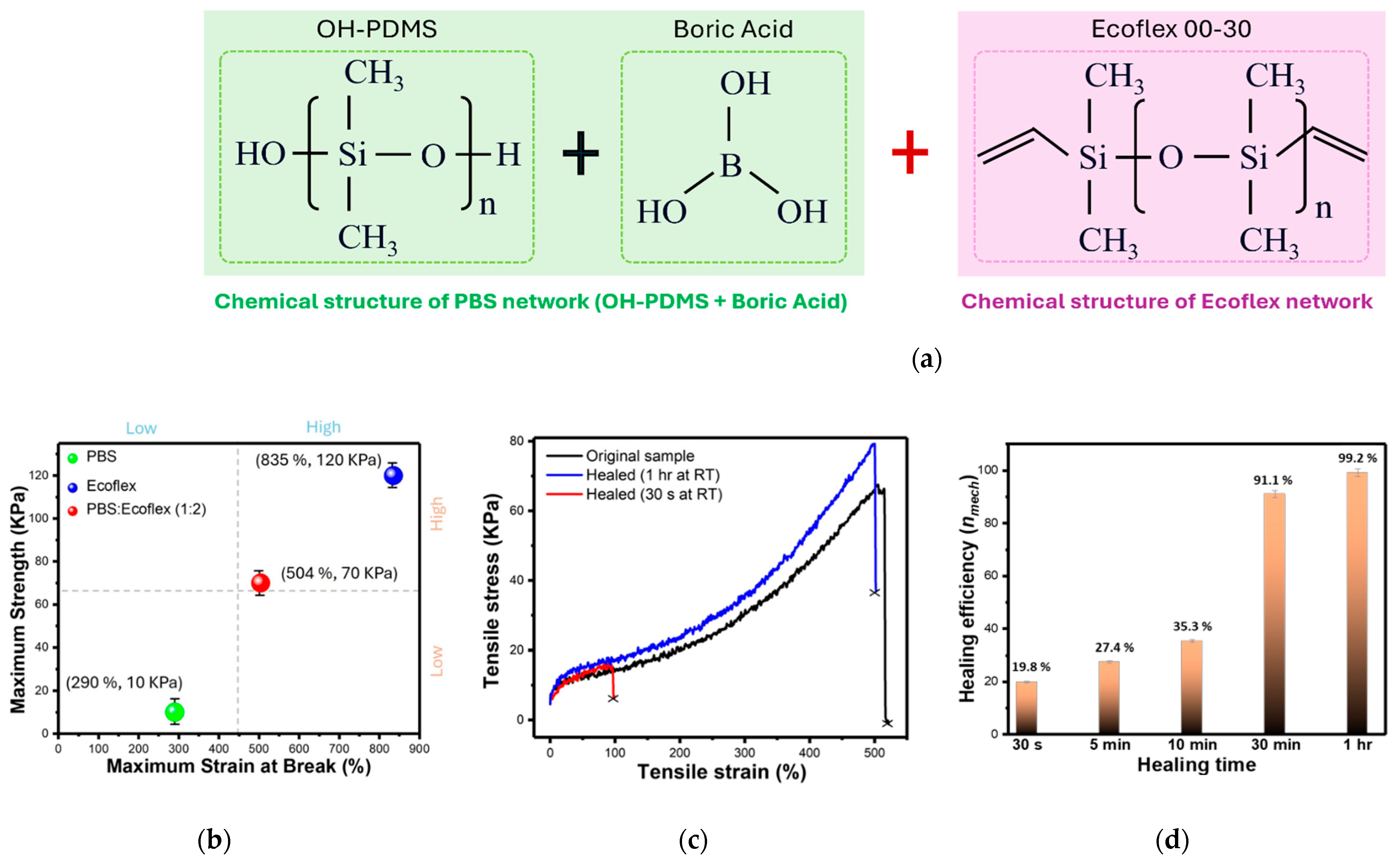
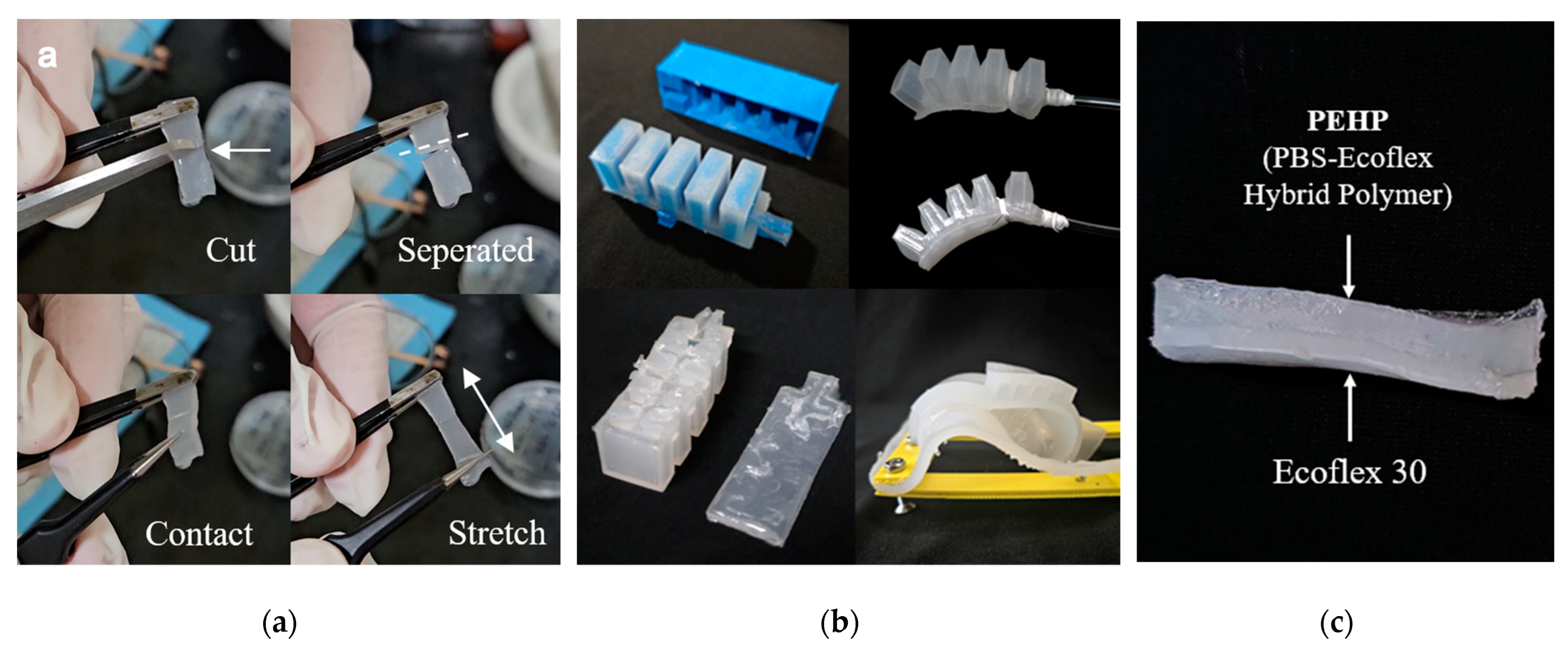
2.1. SHM Synthesis: Physical Polymer Cross-Linking
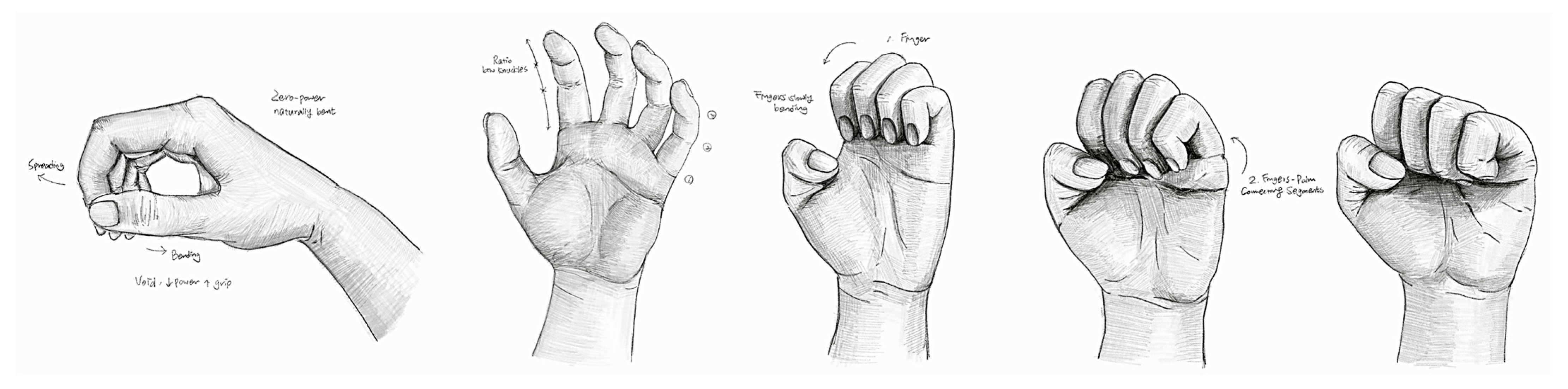
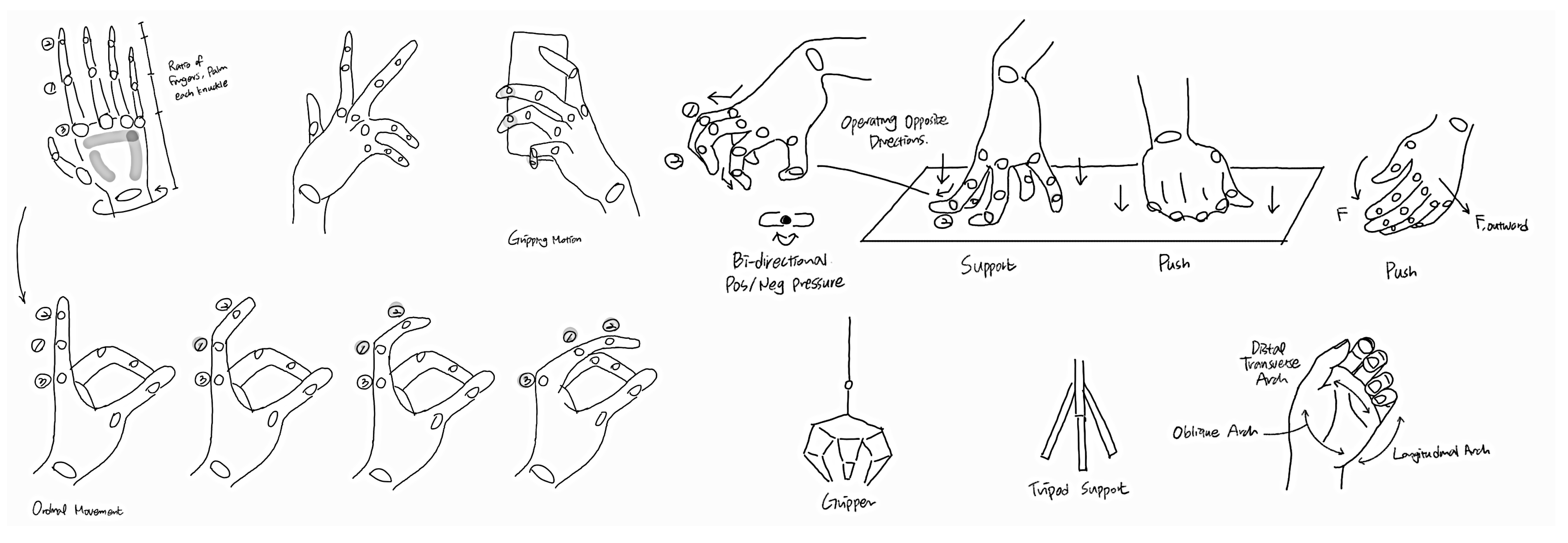
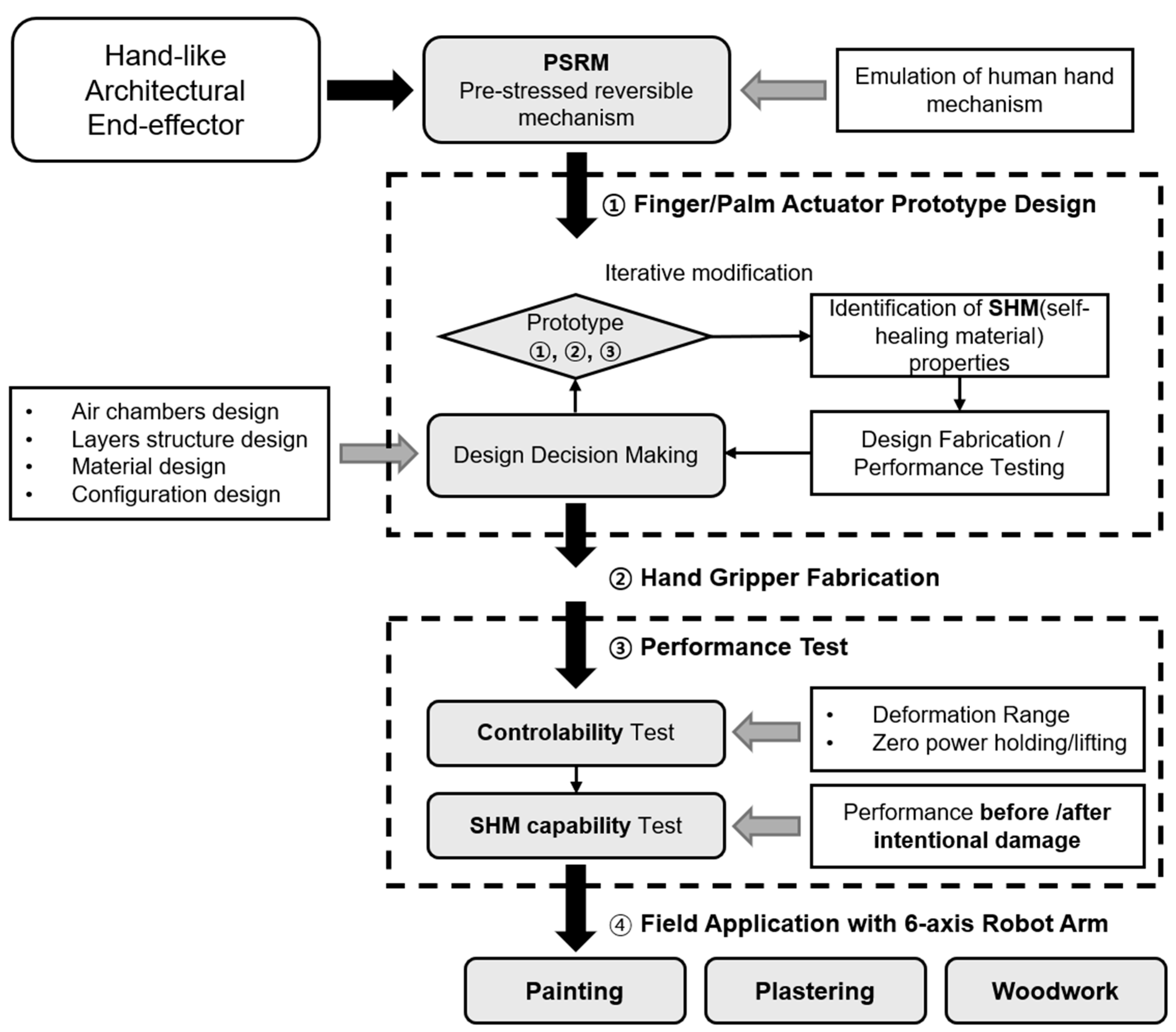
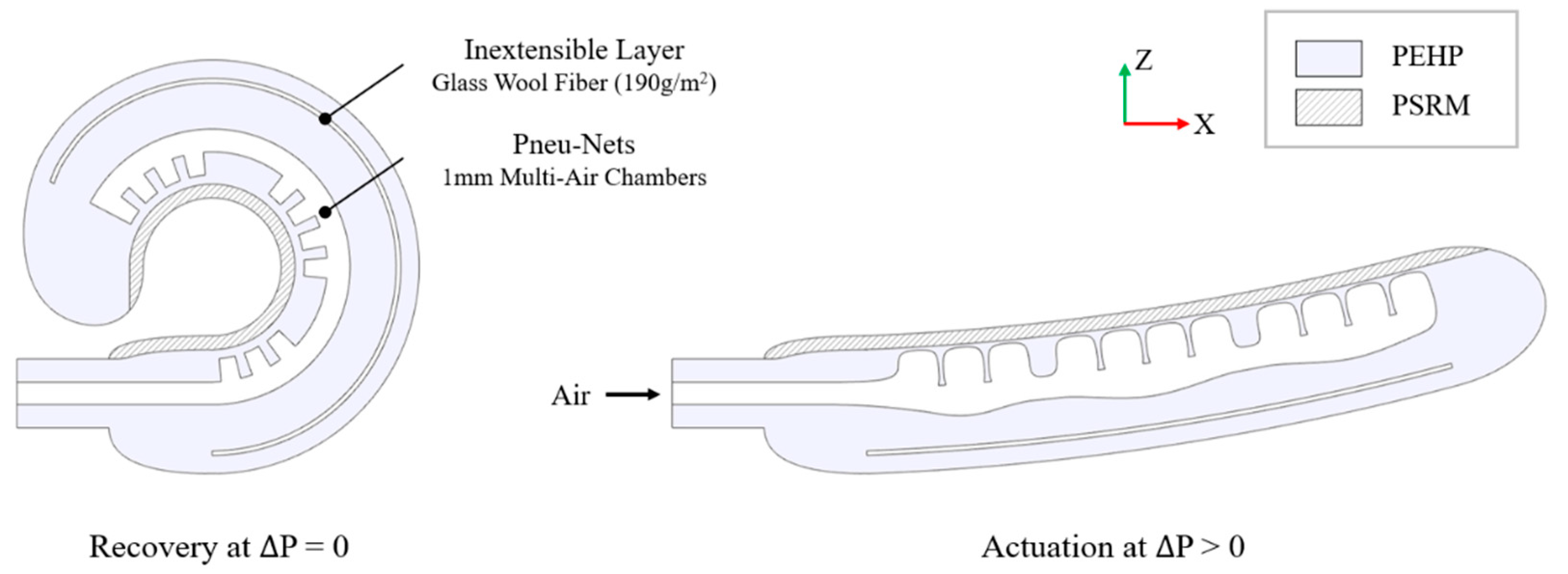
2.2. Biomimetic Design Concept and Driving Mechanism
2.3. Experimental Procedure
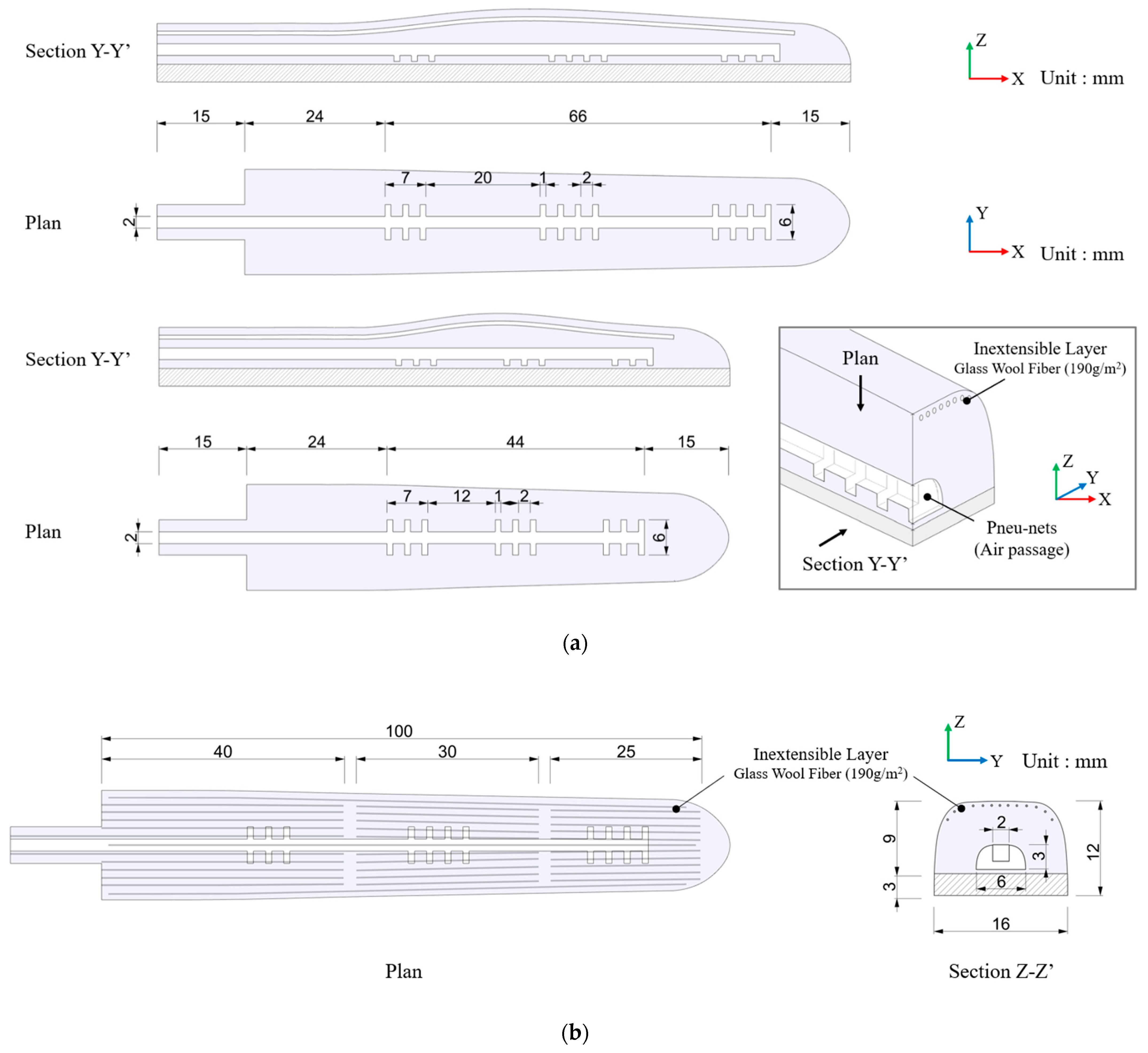
2.4. Design and Fabrication of Gripper Fingers
2.4.1. Finger Design: Proof-of-Concept
- Type 1: A dual-layer elastomer configuration where the top layer contains linearly connected air chambers adhered to a pre-stretched non-SHM elastomer bottom layer. This design facilitates programmable actuation through adjustments to the direction and magnitude of the stretching force.
- Type 2: An exploration of double pneu-net PEHP layers for the upper section to augment bending capability and enhance object holding through inflation of the top layer, mimicking the bidirectional motion characteristic of human fingers. However, the inherent weak stiffness of PEHP due to PBS content and inadequate reaction following complete solidification resulted in complex air chamber arrangements that hindered rapid shape recovery during deflation and complicated the manufacturing process.
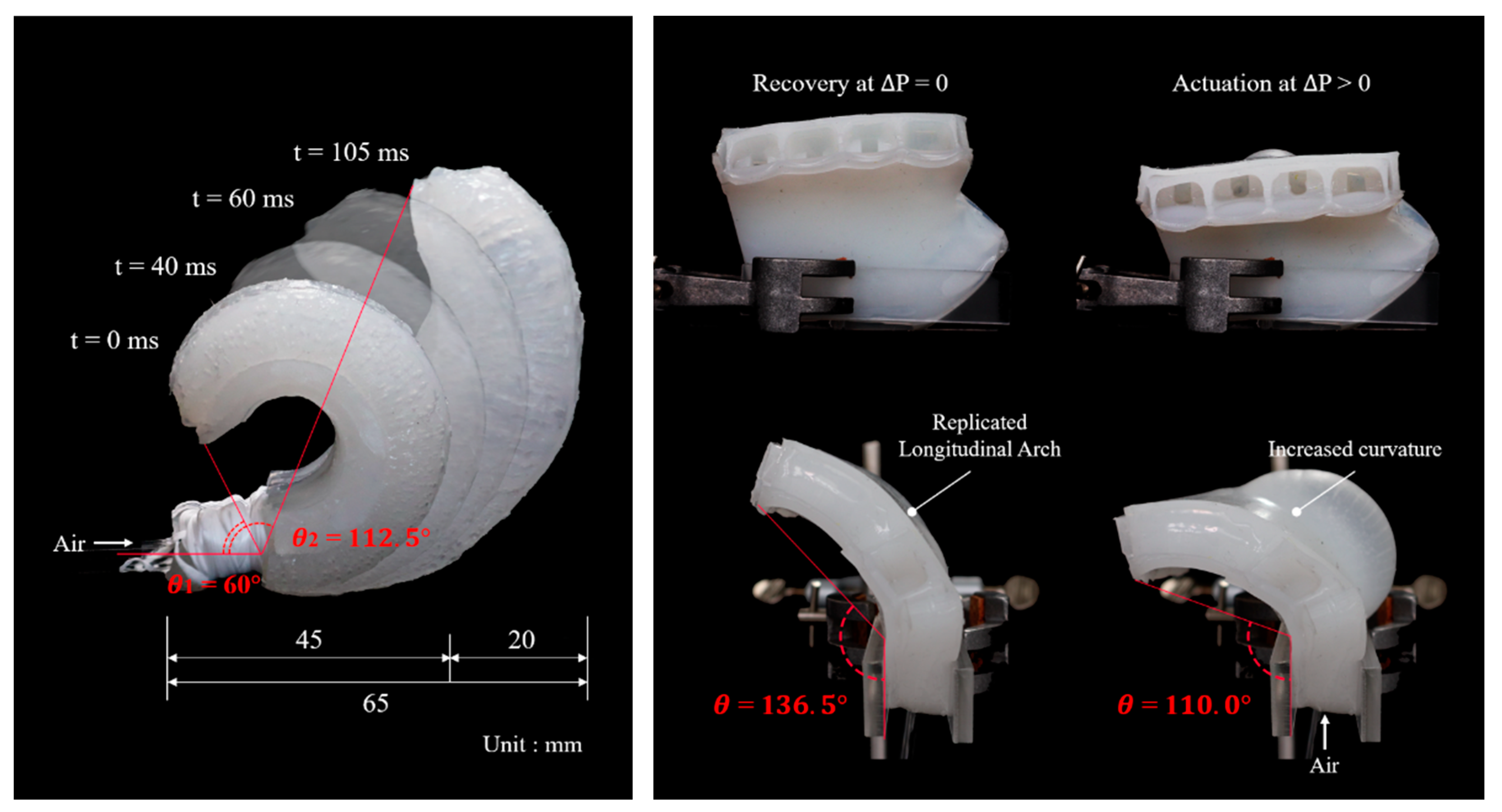
- Type 3: Our optimized final design features a thickened PEHP layer with simplified chamber geometries specifically engineered to replicate human finger actions. The incorporation of glass wool fiber reinforcement mimics elastic ligaments and significantly enhances the stiffness of the PEHP layer. This fiber enhancement effectively guides directional bending of the finger, resulting in improved performance by minimizing unintended inflation patterns.
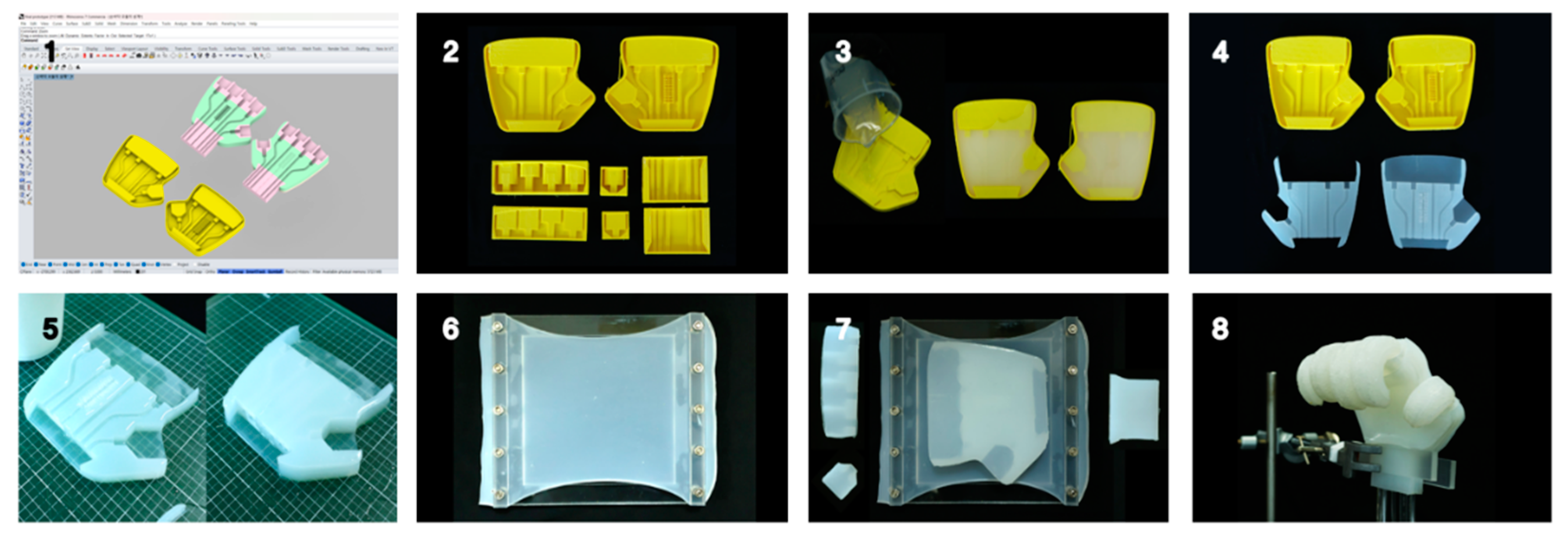
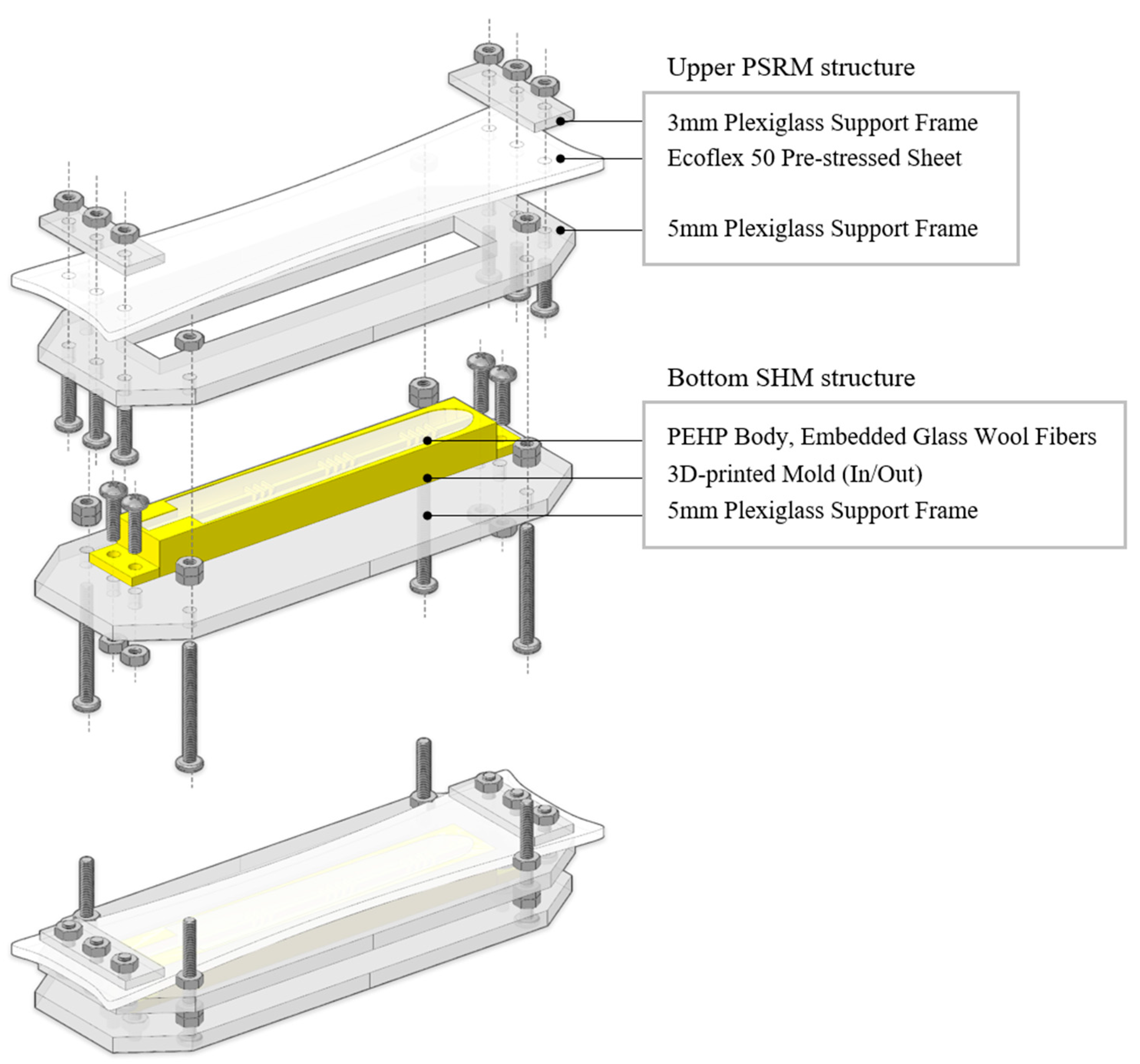
2.4.2. Fingers Fabrication
2.5. Design and Fabrication of the Palm
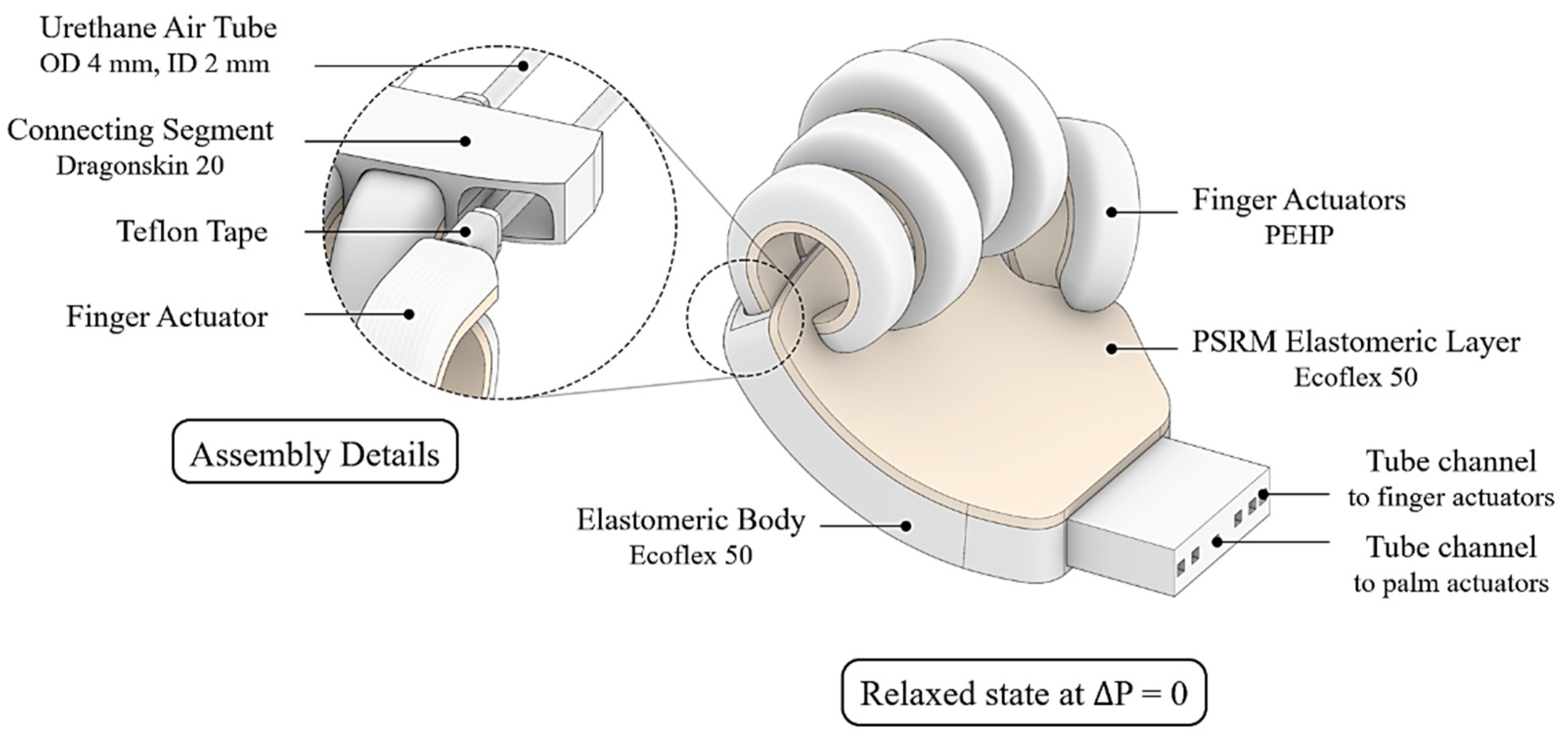
2.5.1. Palm Design
2.5.2. Palm Fabrication
3. Results and Discussion
3.1. PEHP Material Behavior
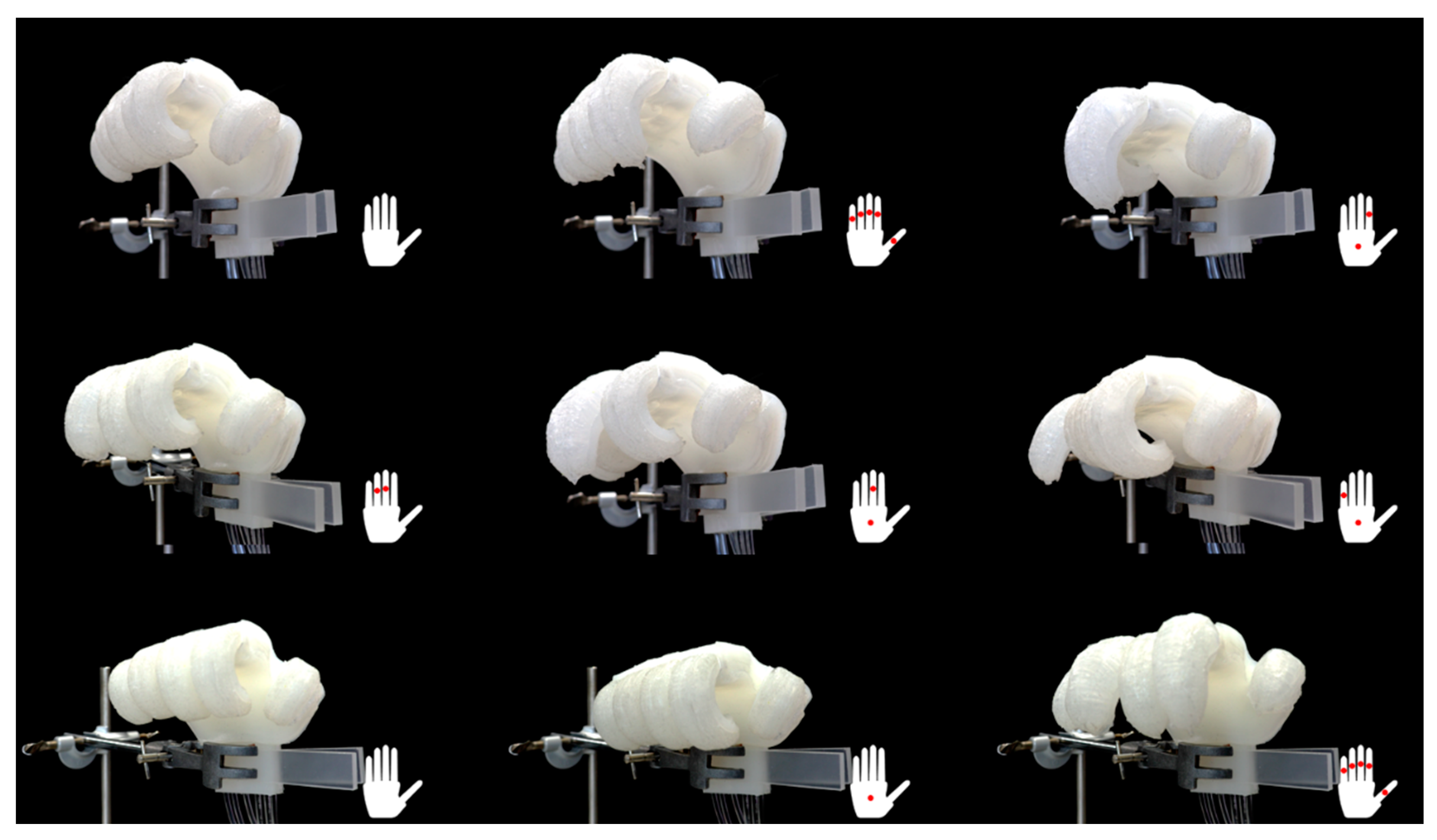
3.2. Proof-of-Concept Fabrication
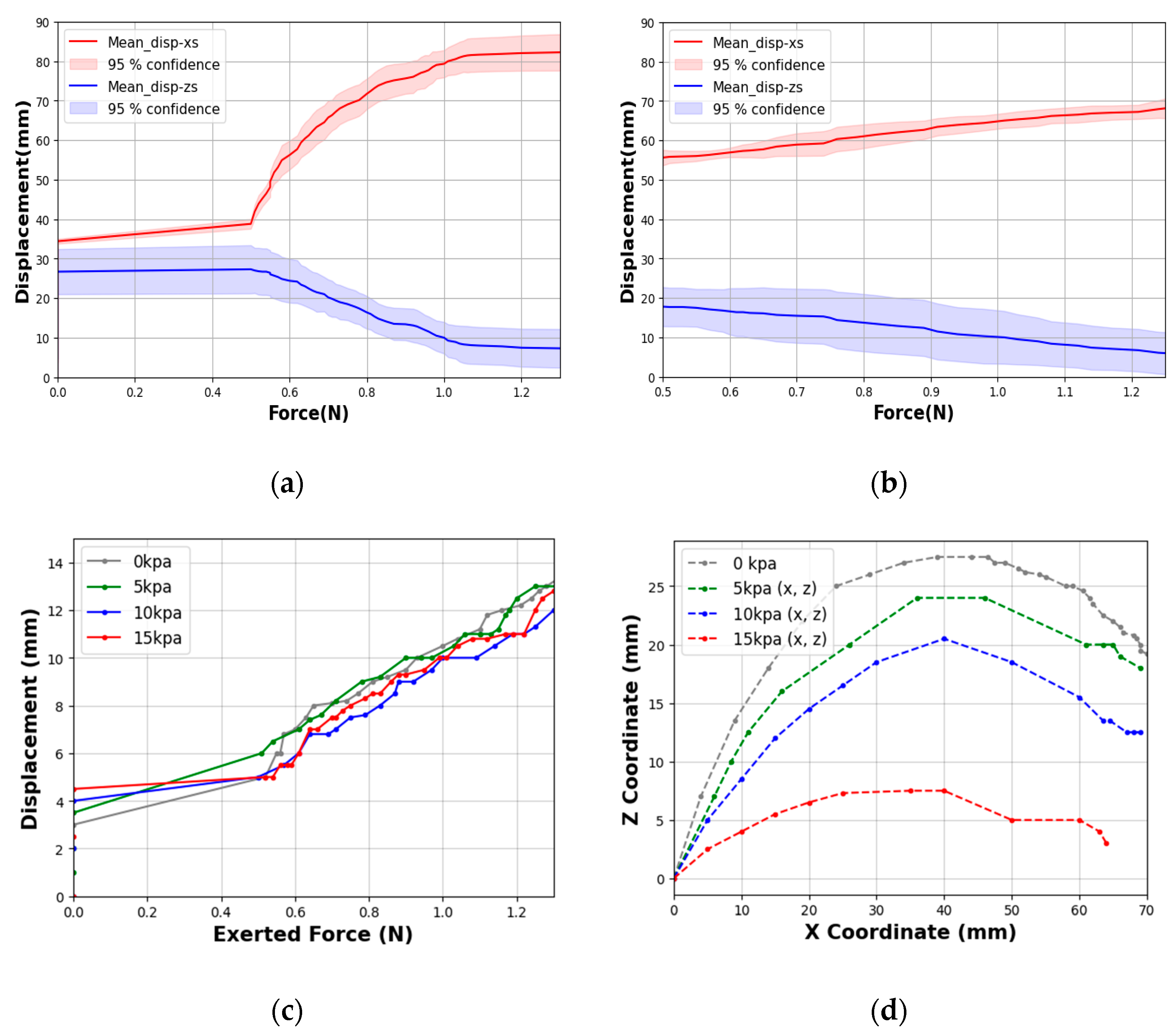
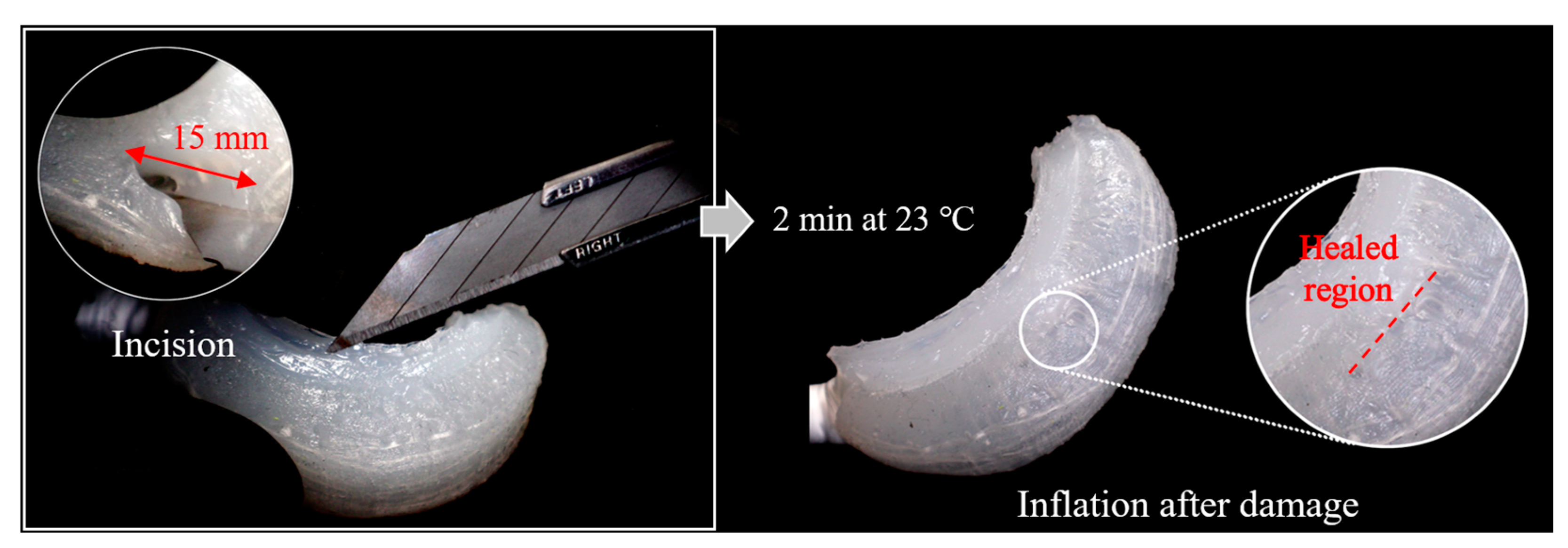
3.3. Mechanical and Self-Healing Performance
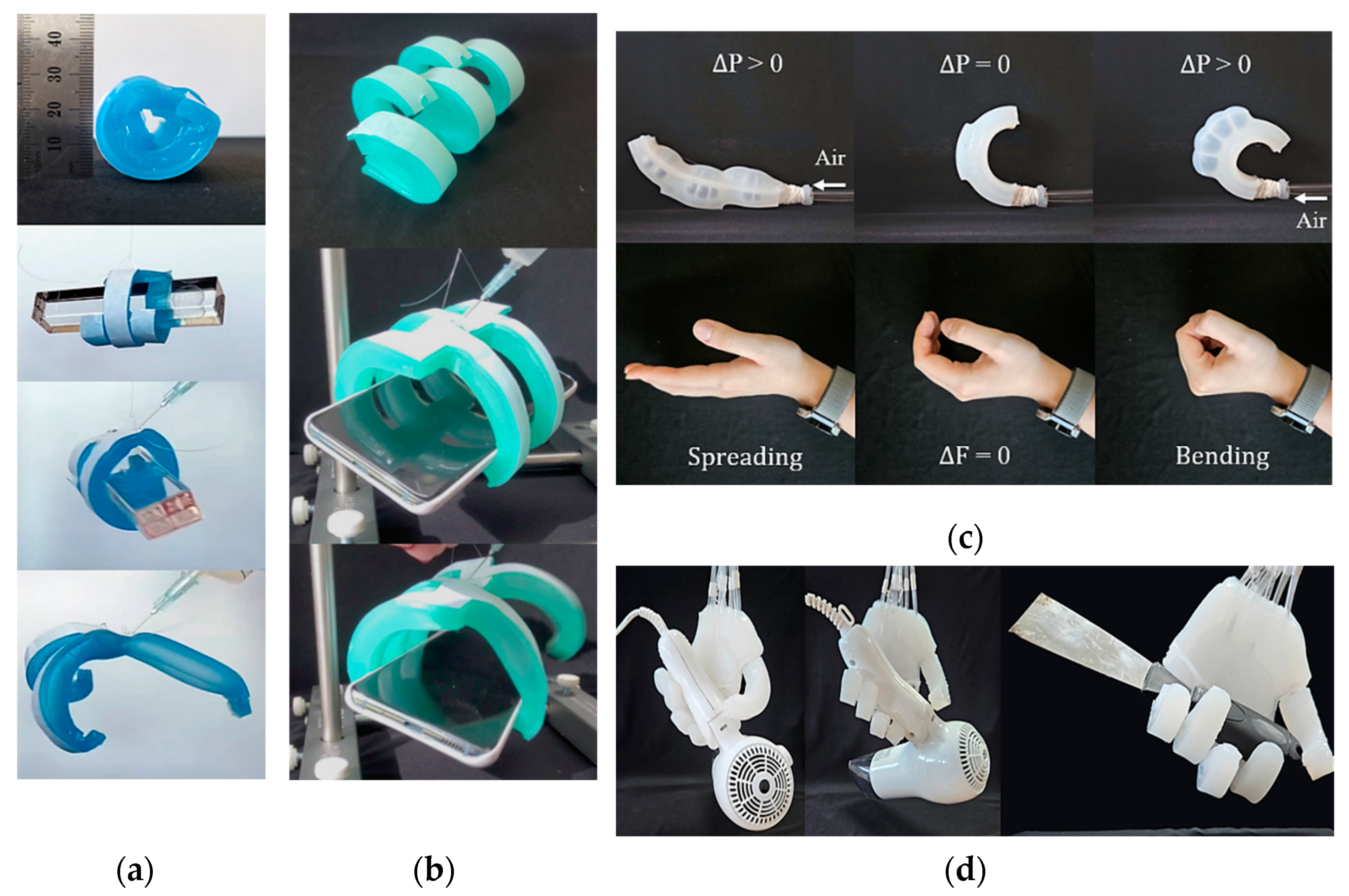
3.4. Performance of Soft Hand Gripper as Versatile End-Effector
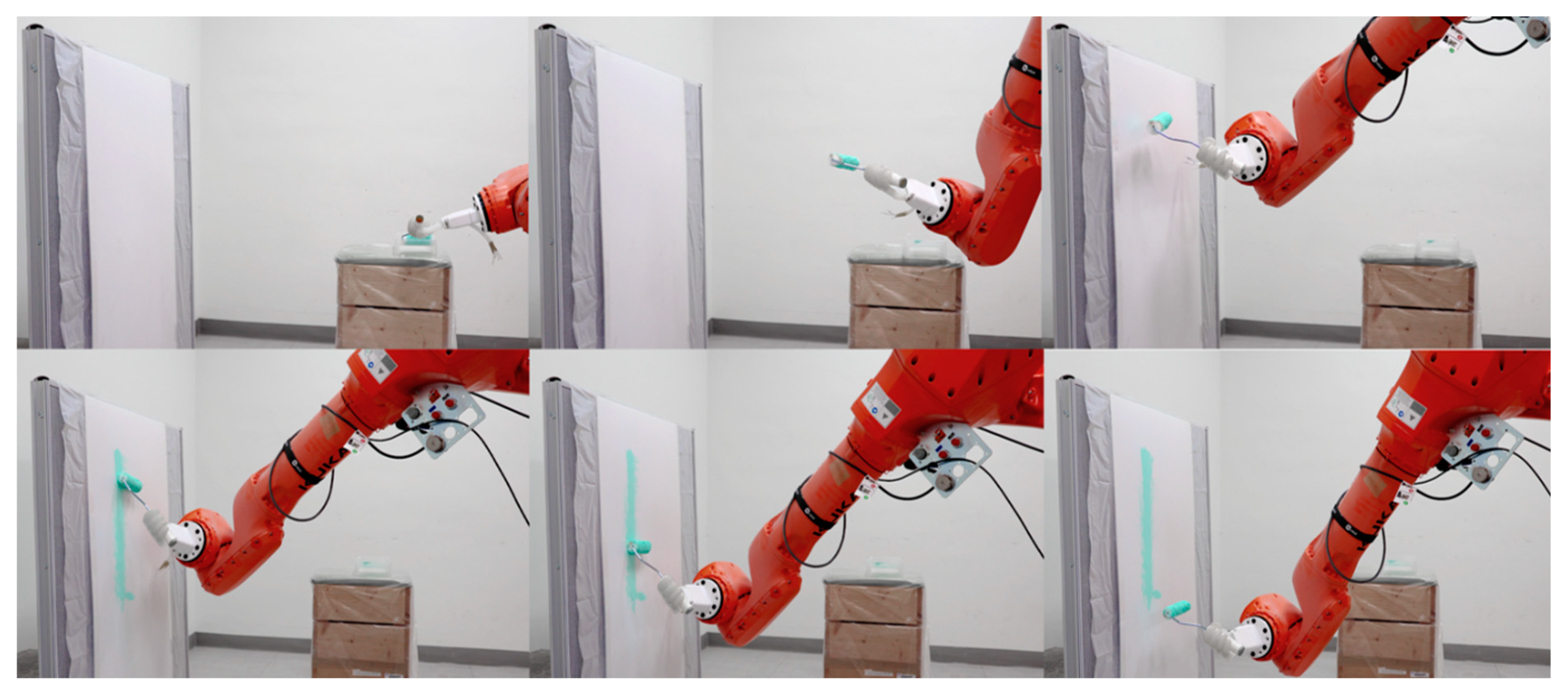
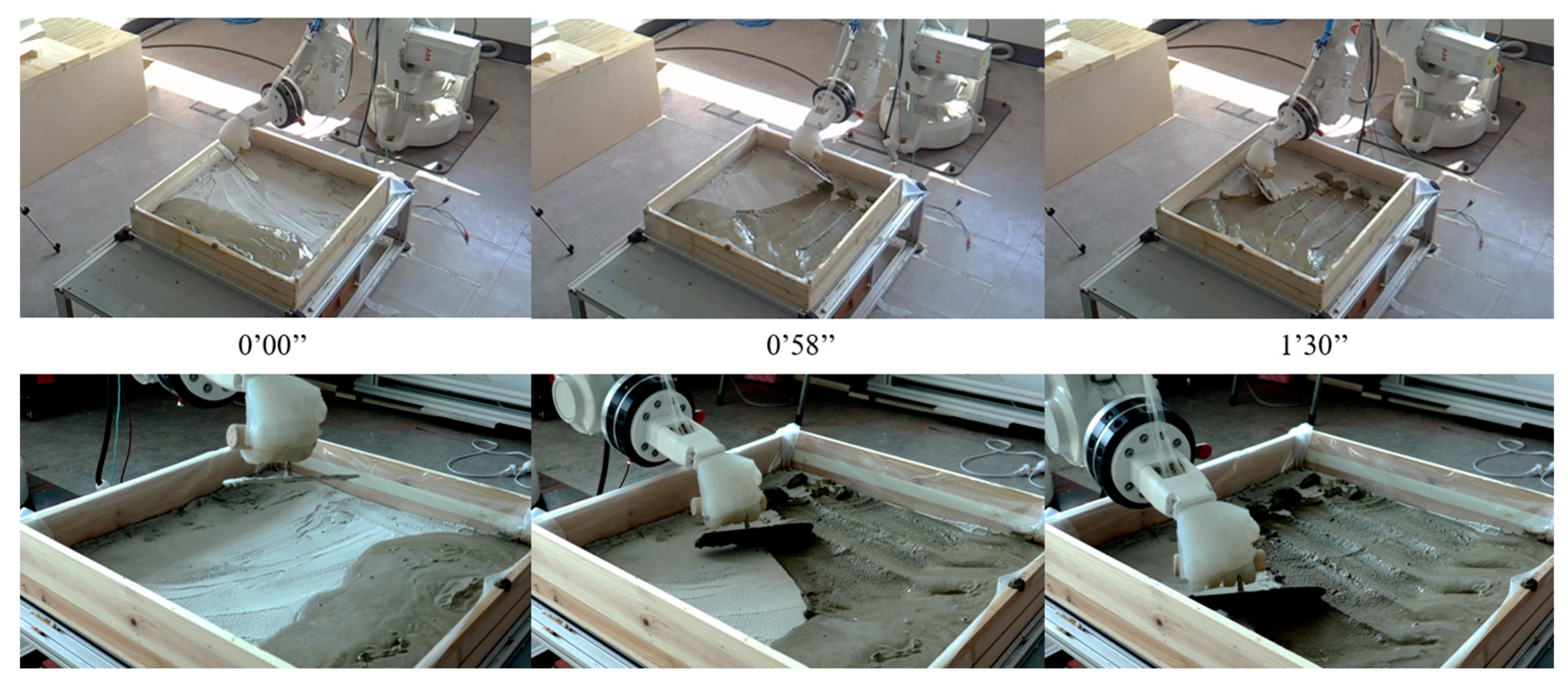
3.5. Field Tests: Robotic Arm Operation
3.6. Limitations and Further Challenges
- The inherent structural limitations of low-stiffness materials constrain the applicability of the gripper primarily to lightweight tasks such as plastering, painting, and general tool handling. Current grasping force and mechanical stability levels are insufficient for heavy load-bearing tasks, including the transportation of structural materials. To address these limitations, advanced hybrid designs that integrate rigid and soft components could be explored. Such designs would aim to enhance load-bearing capabilities without sacrificing the beneficial compliance characteristics of the existing soft gripper design.
- The durability of the soft hand gripper remains a critical limitation. Silicone elastomers, while advantageous for their compliance and safety properties in electrically hazardous or high-temperature environments, degrade through prolonged exposure to mechanical stress, chemical interactions, or environmental factors such as ultraviolet radiation. The resulting wear not only necessitates regular maintenance or component replacement but also impacts the reliability and predictability of the gripper’s performance over lifespan.
- A detailed cost–benefit analysis that includes material synthesis, scalability of manufacturing processes, and maintenance requirements is essential to assess the gripper’s industrial viability comprehensively. While silicone elastomers are expected to offer significant cost benefits, exact cost-effectiveness and long-term sustainability in high-volume manufacturing contexts remain to be demonstrated conclusively.
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PSRM | Pre-stressed reversible mechanism |
| SHM | Self-healing material |
| PEHP | Polyborosiloxane–Ecoflex hybrid polymer |
Appendix A

Appendix B
Appendix C
Appendix D
Appendix E
References
- Xiao, B.; Chen, C.; Yin, X. Recent advancements of robotics in construction. Autom. Constr. 2022, 144, 104591. [Google Scholar] [CrossRef]
- Liu, Y.; Alias, A.H.; Haron, N.A.; Bakar, N.A.; Wang, H. Robotics in the construction sector: Trends, advances, and challenges. J. Intell. Robot. Syst. 2024, 110, 72. [Google Scholar] [CrossRef]
- Melenbrink, N.; Werfel, J.; Menges, A. On-site autonomous construction robots: Towards unsupervised building. Autom. Constr. 2020, 119, 103312. [Google Scholar] [CrossRef]
- Zhang, M.; Xu, R.; Wu, H.; Pan, J.; Luo, X. Human–robot collaboration for on-site construction. Autom. Constr. 2023, 150, 104812. [Google Scholar] [CrossRef]
- Kim, U.; Jung, D.; Jeong, H.; Park, J.; Jung, H.-M.; Cheong, J.; Choi, H.R.; Do, H.; Park, C. Integrated linkage-driven dexterous anthropomorphic robotic hand. Nat. Commun. 2021, 12, 7177. [Google Scholar] [CrossRef] [PubMed]
- Park, H.; Kim, D. An open-source anthropomorphic robot hand system: HRI hand. HardwareX 2020, 7, e00100. [Google Scholar] [CrossRef] [PubMed]
- Shadow Robot Company. Dexterous Hand Series. Available online: https://www.shadowrobot.com/dexterous-hand-series/ (accessed on 15 March 2025).
- Zhang, Y.; Zhang, W.; Gao, P.; Zhong, X.; Pu, W. Finger–palm synergistic soft gripper for dynamic capture via energy harvesting and dissipation. Nat. Commun. 2022, 13, 7700. [Google Scholar] [CrossRef]
- Firth, C.; Dunn, K.; Haeusler, M.H.; Sun, Y. Anthropomorphic soft robotic end-effector for use with collaborative robots in the construction industry. Autom. Constr. 2022, 138, 104218. [Google Scholar] [CrossRef]
- Li, G.; Liu, S.; Wang, L.; Zhu, R. Skin-inspired quadruple tactile sensors integrated on a robot hand enable object recognition. Sci. Robot. 2020, 5, eabc8134. [Google Scholar] [CrossRef]
- Kashef, S.R.; Amini, S.; Akbarzadeh, A. Robotic hand: A review on linkage-driven finger mechanisms of prosthetic hands and evaluation of the performance criteria. Mech. Mach. Theory 2020, 145, 103677. [Google Scholar] [CrossRef]
- Ma, X.; Zhang, J.; Wang, B.; Huang, J.; Bao, G. Continuous adaptive gaits manipulation for three-fingered robotic hands via bioinspired fingertip contact events. Biomim. Intell. Robot. 2024, 4, 100144. [Google Scholar] [CrossRef]
- Lee, K.; Shin, J.; Lim, J.-Y. Critical hazard factors in the risk assessments of industrial robots: Causal analysis and case studies. Saf. Health Work 2021, 12, 496–504. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Peternel, L.; Lorenzini, M.; Babič, J.; Ajoudani, A. A human–robot collaboration framework for improving ergonomics during dexterous operation of power tools. Robot. Cim.-Int. Manuf. 2021, 68, 102084. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Ren, T.; Hu, Y.; Liu, H.; Lin, S.; Yang, Y.; Li, Y.; Zhou, J. A dual-mode actuator for soft robotic hand. IEEE Robot. Autom. Lett. 2021, 6, 1144–1151. [Google Scholar] [CrossRef]
- Wang, H.; Abu-Dakka, F.; Nguyen, T.; Kyrki, V.; Xu, H. A novel soft robotic hand design with human-inspired soft palm: Achieving a great diversity of grasps. IEEE Robot. Autom. Mag. 2021, 28, 2–14. [Google Scholar] [CrossRef]
- Puhlmann, S.; Harris, J.; Brock, O. RBO Hand 3: A platform for soft dexterous manipulation. IEEE T-Ro 2020, 38, 3434–3449. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef]
- Luo, Y.; Wu, K.; Spielberg, A.; Foshey, M.; Palacios, T.; Rus, D.; Matusik, W. Digital fabrication of pneumatic actuators with integrated sensing by machine knitting. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems (CHI ‘22), New Orleans, LA, USA, 30 April–6 May 2022. [Google Scholar] [CrossRef]
- Cardin-Catalan, D.; Ceppetelli, S.; del Pobil, A.P.; Morales, A. Design and analysis of a variable-stiffness robotic gripper. Alex. Eng. J. 2022, 61, 1235–1248. [Google Scholar] [CrossRef]
- Li, L.; Xie, F.; Wang, T.; Wang, G.; Tian, Y.; Jin, T.; Zhang, Q. Stiffness-tunable soft gripper with soft–rigid hybrid actuation for versatile manipulations. Soft Robot. 2022, 9, 1108–1119. [Google Scholar] [CrossRef]
- Goh, G.L.; Goh, G.D.; Nguyen, V.P.; Toh, W.; Lee, S.; Li, X.; Sunil, B.D.; Lim, J.Y.; Li, Z.; Sinha, A.K.; et al. A 3D-printing-enabled artificially innervated smart soft gripper with variable joint stiffness. Adv. Mater. Technol. 2023, 8, 2301426. [Google Scholar] [CrossRef]
- Pal, A.; Goswami, D.; Martinez, R.V. Elastic energy storage enables rapid and programmable actuation in soft machines. Adv. Funct. Mater. 2020, 30, 1906603. [Google Scholar] [CrossRef]
- Xu, Z.; Hu, L.; Zhou, Y. A soft gripper integrated with mechanically-prestressed soft actuators. In Proceedings of the 2022 IEEE International Conference on Sensing, Diagnostics, Prognostics, and Control (SDPC), Chongqing, China, 5–7 August 2022; pp. 190–194. [Google Scholar] [CrossRef]
- Tang, Y.; Chi, Y.; Sun, J.; Huang, T.H.; Maghsoudi, O.H.; Spence, A.; Zhao, J.; Su, H.; Yin, J. Leveraging elastic instabilities for amplified performance: Spine-inspired high-speed and high-force soft robots. Sci. Adv. 2020, 6, eaaz6912. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Torigoe, Y.; Hirai, S. A prestressed soft gripper: Design, modeling, fabrication, and tests for food handling. IEEE Robot. Autom. Lett. 2017, 2, 1909–1916. [Google Scholar] [CrossRef]
- Tang, M.; Li, Z.; Wang, K.; Jiang, Y.; Tian, M.; Qin, Y.; Gong, Y.; Li, Z.; Wu, L. Ultrafast self-healing and self-adhesive polysiloxane towards reconfigurable on-skin electronics. J. Mater. Chem. A 2022, 10, 1750–1759. [Google Scholar] [CrossRef]
- Terryn, S.; Langenbach, J.; Roels, E.; Brancart, J.; Bakkali-Hassani, C.; Poutrel, Q.A.; Georgopoulou, A.; Thuruthel, T.G.; Safaei, A.; Ferrentino, P.; et al. A review on self-healing polymers for soft robotics. Mater. Today 2021, 47, 187–205. [Google Scholar] [CrossRef]
- Terryn, S.; Brancart, J.; Roels, E.; Van Assche, G.; Vanderborght, B. Room temperature self-healing in soft pneumatic robotics: Autonomous self-healing in a Diels–Alder polymer network. IEEE Robot. Autom. Mag. 2020, 27, 44–55. [Google Scholar] [CrossRef]
- Roels, E.; Terryn, S.; Brancart, J.; Verhelle, R.; Van Assche, G.; Vanderborght, B. Additive manufacturing for self-healing soft robots. Soft Robot. 2020, 7, 711–723. [Google Scholar] [CrossRef]
- Yeasmin, R.; Han, S.I.; Duy, L.T.; Ahn, B.; Seo, H. A skin-like self-healing and stretchable substrate for wearable electronics. Chem. Eng. J. 2023, 455, 140543. [Google Scholar] [CrossRef]
- Tang, M.; Zheng, P.; Wang, K.; Qin, Y.; Jiang, Y.; Cheng, Y.; Li, Z.; Wu, L. Autonomous self-healing, self-adhesive, highly conductive composites based on a silver-filled polyborosiloxane/polydimethylsiloxane double-network elastomer. J. Mater. Chem. A 2019, 7, 27731–27740. [Google Scholar] [CrossRef]
- Kim, M.; Kim, B.-G.; Koh, J.-S.; Yi, H. Flexural biomimetic responsive building façade using a hybrid soft robot actuator and fabric membrane. Autom. Constr. 2023, 145, 104660. [Google Scholar] [CrossRef]
- Sangole, A.P.; Levin, M.F. Arches of the hand in reach to grasp. J. Biomech. 2008, 41, 829–837. [Google Scholar] [CrossRef] [PubMed]
- Marchese, A.D.; Katzschmann, R.K.; Rus, D. A recipe for soft fluidic elastomer robots. Soft Robot. 2015, 2, 1–11. [Google Scholar] [CrossRef]
- Sun, T.; Chen, Y.; Han, T.; Jiao, C.; Lian, B.; Song, Y. A soft gripper with variable stiffness inspired by pangolin scales, toothed pneumatic actuator and autonomous controller. Robot. Cim.-Int. Manuf. 2020, 61, 101848. [Google Scholar] [CrossRef]
- Udupa, G.; Sreedharan, P.; Dinesh, P.S.; Kim, D. Asymmetric Bellow Flexible Pneumatic Actuator for Miniature Robotic Soft Gripper. J. Robot. 2014, 2014, 90262. [Google Scholar] [CrossRef]
- Yap, H.K.; Ng, H.Y.; Yeow, C.H. High-force soft printable pneumatics for soft robotic applications. Soft Robot. 2016, 3, 144–158. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Ren, T.; Li, Y.; Choi, S.H. Precharged Pneumatic Soft Actuators and Their Applications to Untethered Soft Robots. Soft Robot. 2018, 5, 567–575. [Google Scholar] [CrossRef]
- Tawk, C.; Mutlu, R.; Alici, G. A 3D Printed Modular Soft Gripper Integrated With Metamaterials for Conformal Grasping. Front. Robot. AI 2022, 8, 799230. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Hirshikesh, H.; Yu, T.; Ye, X.; Natarajan, S. Experimental Investigation on Adaptive Grasping of a Novel 3d-Msspa Gripper in Complex Space. Sens. Actuat. A-Phys. 2024, 370, 115277. [Google Scholar] [CrossRef]
- Chen, H.; Ali, M.A.H.; Wang, Z.; Chen, J.; Ramadan, M.N.A.; Alkhedher, M. Performance optimizing of pneumatic soft robotic hands using wave-shaped contour actuator. Results Eng. 2025, 25, 103456. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type 1 | Type 2 | Type 3 | |
|---|---|---|---|
| Pneu-net Design (Section) |  | ||
| Structure |
|
|
|
| Test Configuration |
|
|
|
| Limitation |
|
| |
| Design and Material | Source | Max. Tip Force | Max. Payload | Strain Capability |
| Single Finger (L = 30 mm) KE-1606 RTV silicone rubber | [37] | 0.17 N at 180 kPa | N/A | 48° bending at 150 kPa |
| Multi-Finger (L > 200 mm) 3D-Printing polymer | [38] | N/A | 5 kg at 300 kPa (four fingers) | >~100° bending at 200 kPa |
| Single Finger (L = 140 mm) Silicone rubber | [39] | N/A | 0.6 kg at 0.1 MPa (single finger) | N/A |
| Single Finger (L = 119 mm) 3D Printing TPU | [40] | ~0.5 N at 50 kPa 1.94 N at 150 kPa | Holds only light-weight objects | ~25° bending at 30 kPa |
| Single Finger (L = 90 mm) Ecoflex™ 30 | [41] | 0.4~0.8 N (up) and ~1 N (down) at 30 kPa | N/A | 175.2° bending at 40 kPa |
| Single Finger T00 + E600 Silicone | [42] | 0.6 N at 50 kPa | ~0.22 kg (four fingers) | 90° bending at 21 kPa |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.; Yaesmin, R.; Seo, H.; Yi, H. Improved Anthropomorphic Robotic Hand for Architecture and Construction: Integrating Prestressed Mechanisms with Self-Healing Elastomers. Biomimetics 2025, 10, 284. https://doi.org/10.3390/biomimetics10050284
Kim M, Yaesmin R, Seo H, Yi H. Improved Anthropomorphic Robotic Hand for Architecture and Construction: Integrating Prestressed Mechanisms with Self-Healing Elastomers. Biomimetics. 2025; 10(5):284. https://doi.org/10.3390/biomimetics10050284
Chicago/Turabian StyleKim, Mijin, Rubaya Yaesmin, Hyungtak Seo, and Hwang Yi. 2025. "Improved Anthropomorphic Robotic Hand for Architecture and Construction: Integrating Prestressed Mechanisms with Self-Healing Elastomers" Biomimetics 10, no. 5: 284. https://doi.org/10.3390/biomimetics10050284
APA StyleKim, M., Yaesmin, R., Seo, H., & Yi, H. (2025). Improved Anthropomorphic Robotic Hand for Architecture and Construction: Integrating Prestressed Mechanisms with Self-Healing Elastomers. Biomimetics, 10(5), 284. https://doi.org/10.3390/biomimetics10050284