

Review of Electrohydraulic Actuators Inspired by the HASEL Actuator
 , , ,
, , ,  , and
, and
Abstract
1. Introduction
2. Types of Electrohydraulic Actuators
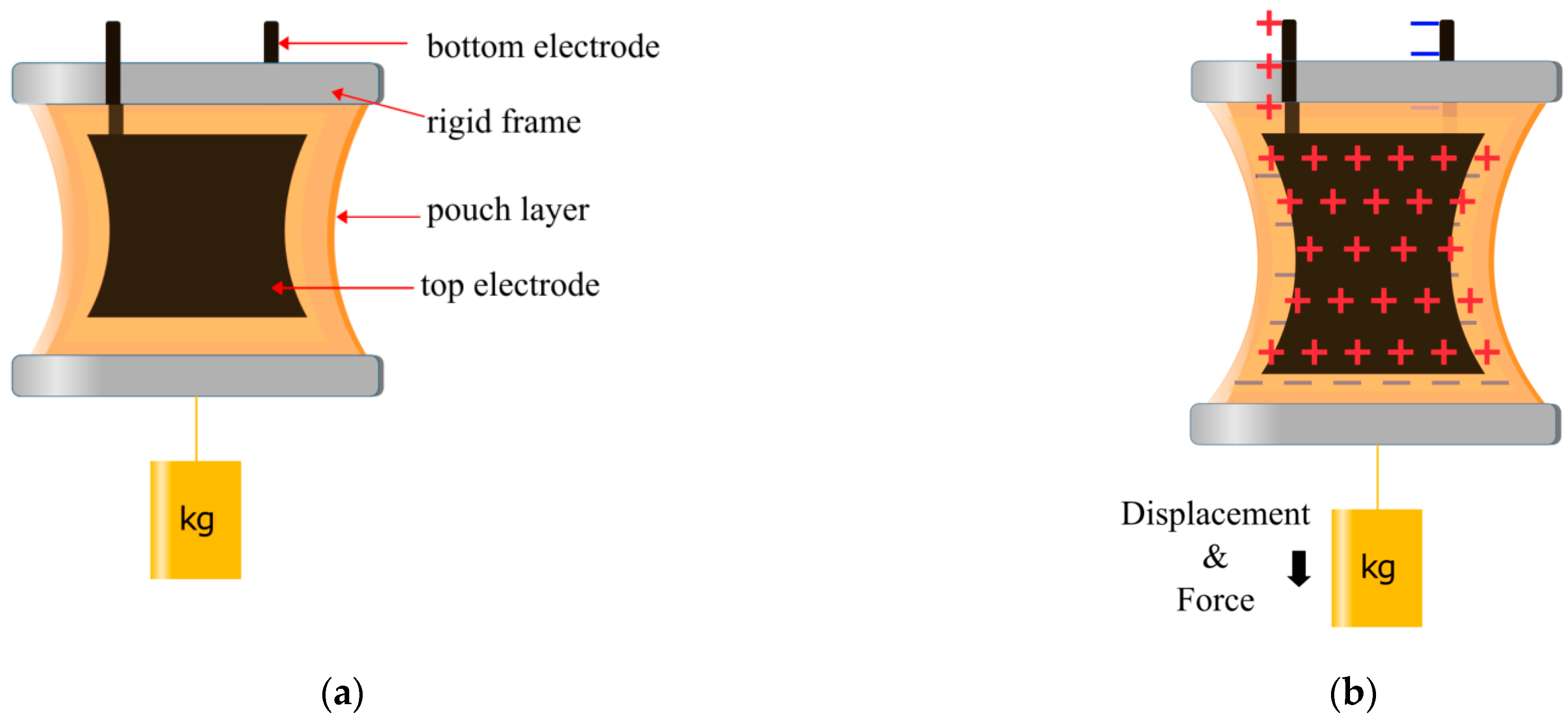
2.1. Elastomeric HASEL Actuators
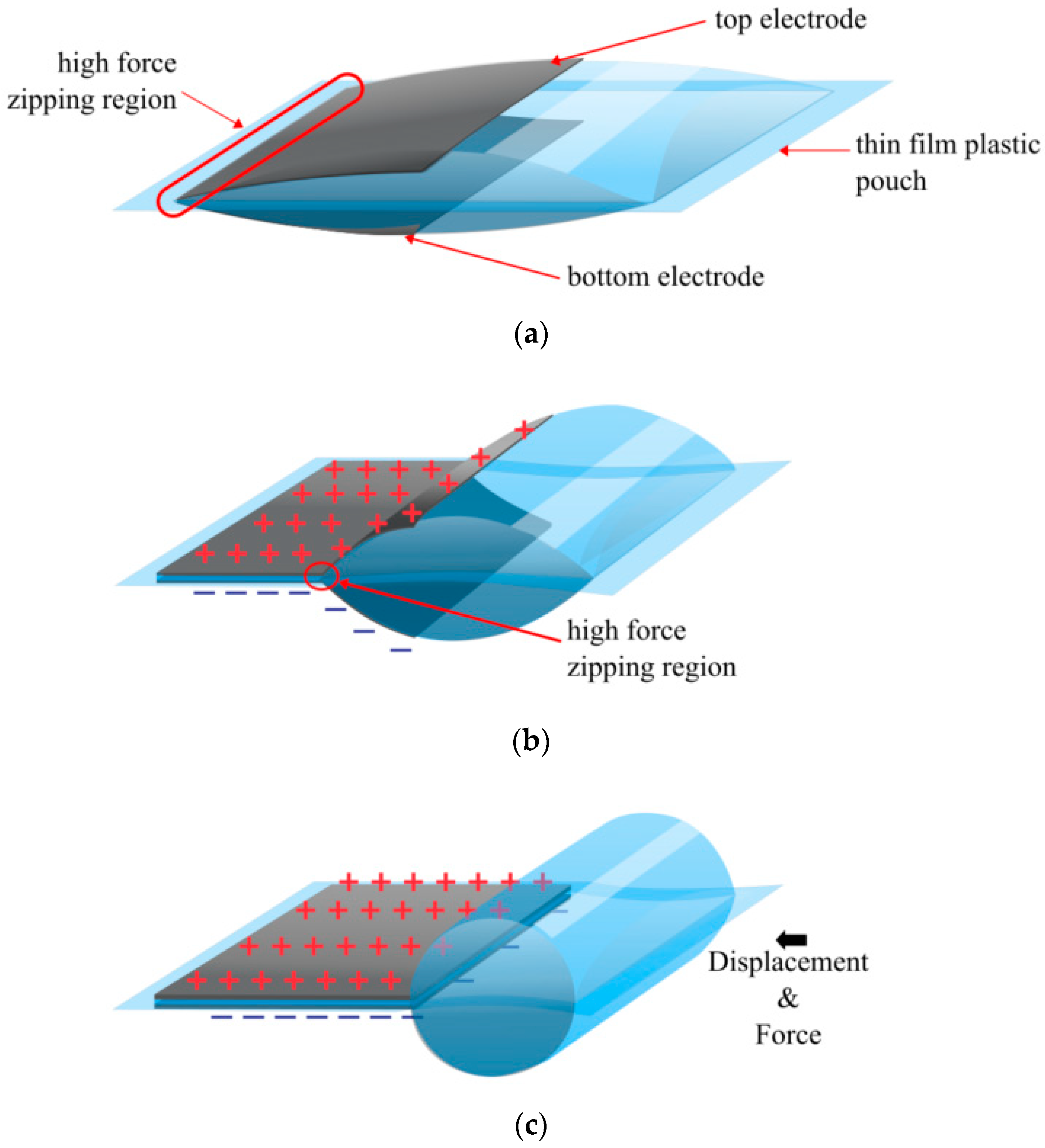
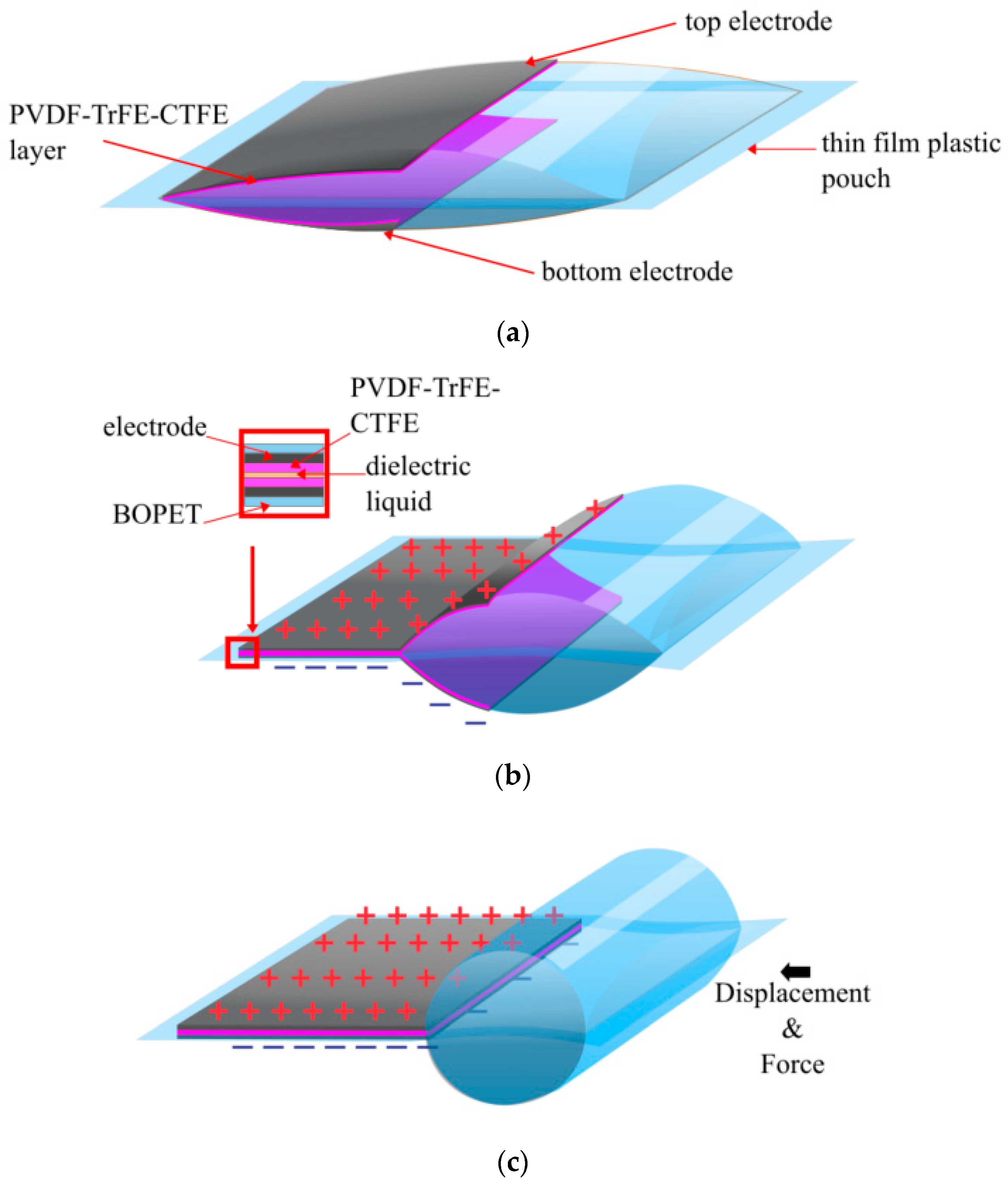
2.2. Peano HASEL Actuator (Thin Film Plastic Actuator)
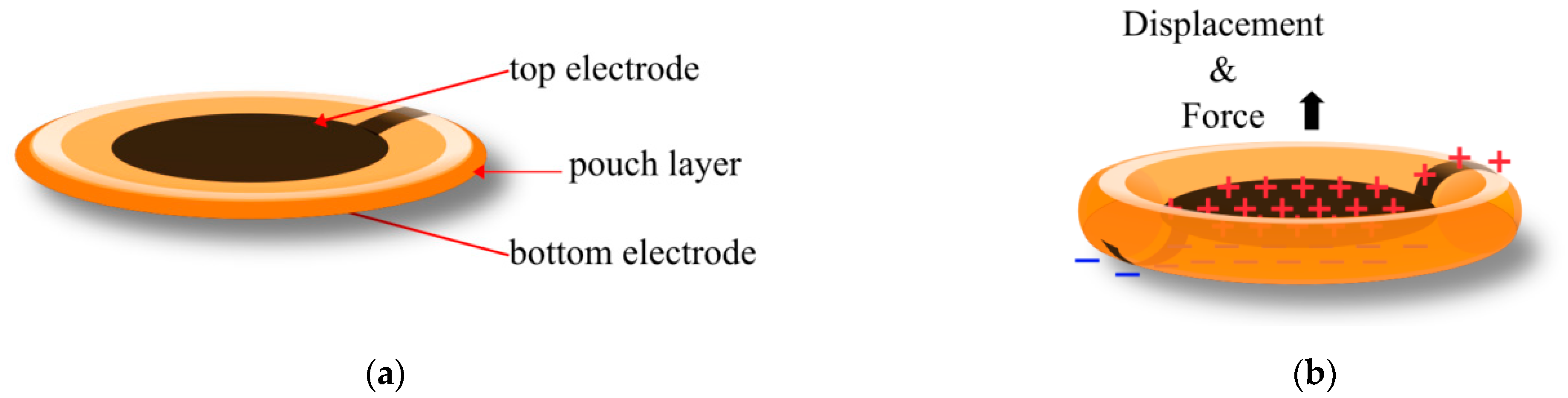
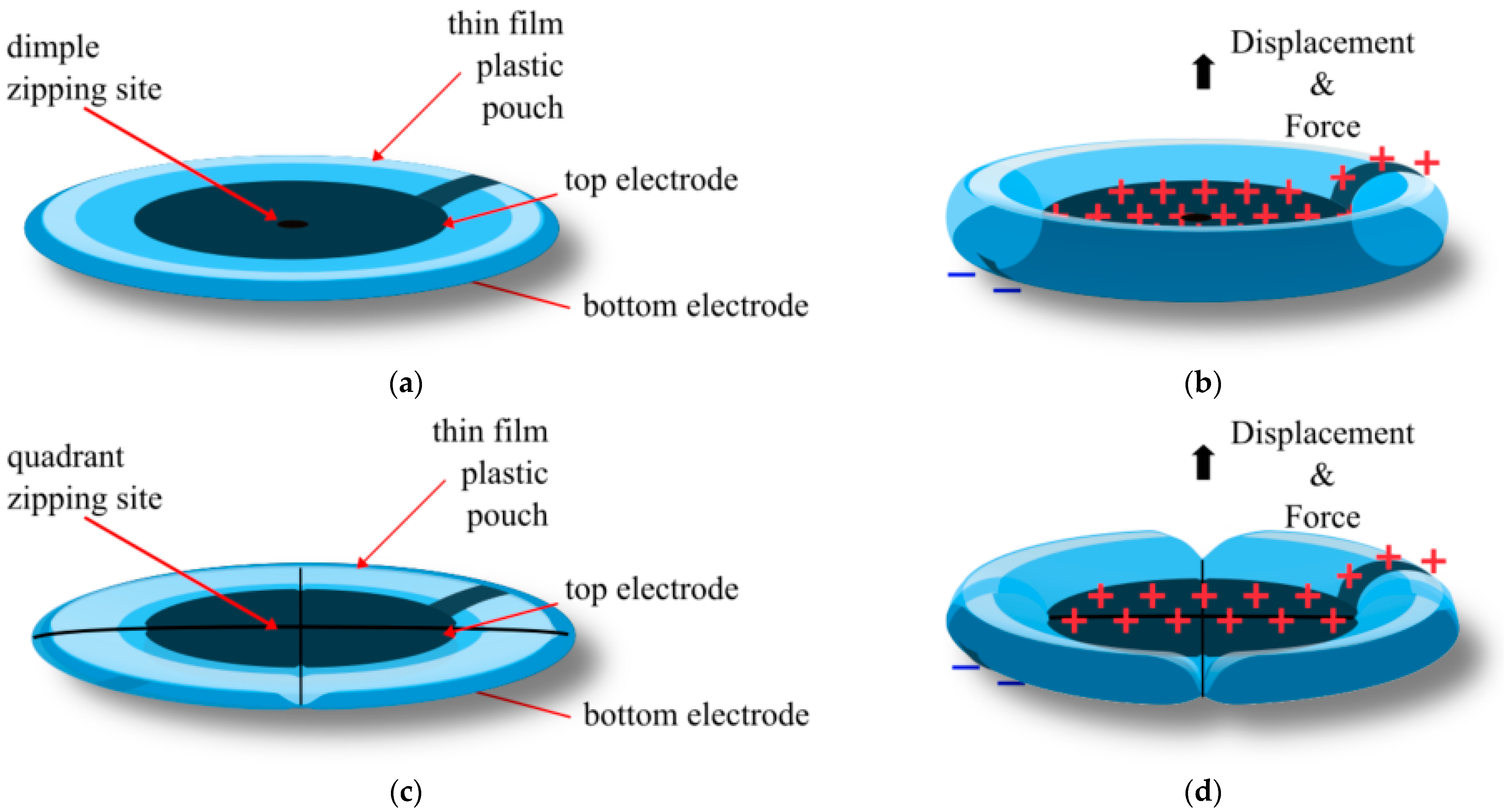
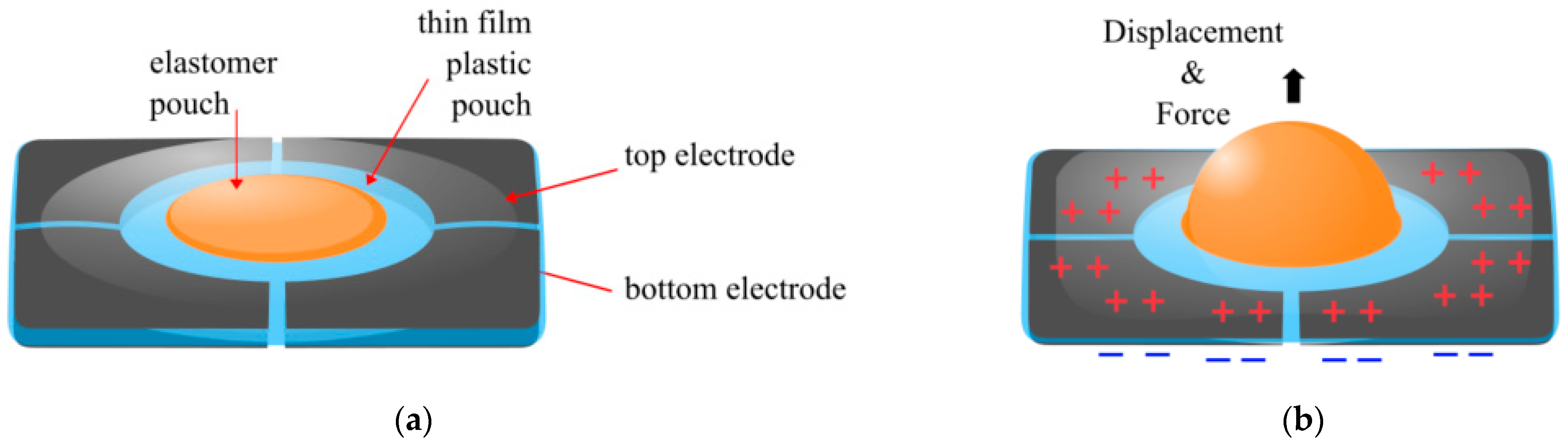
2.3. Donut HASEL Actuators (Thin Film Plastic Actuator)
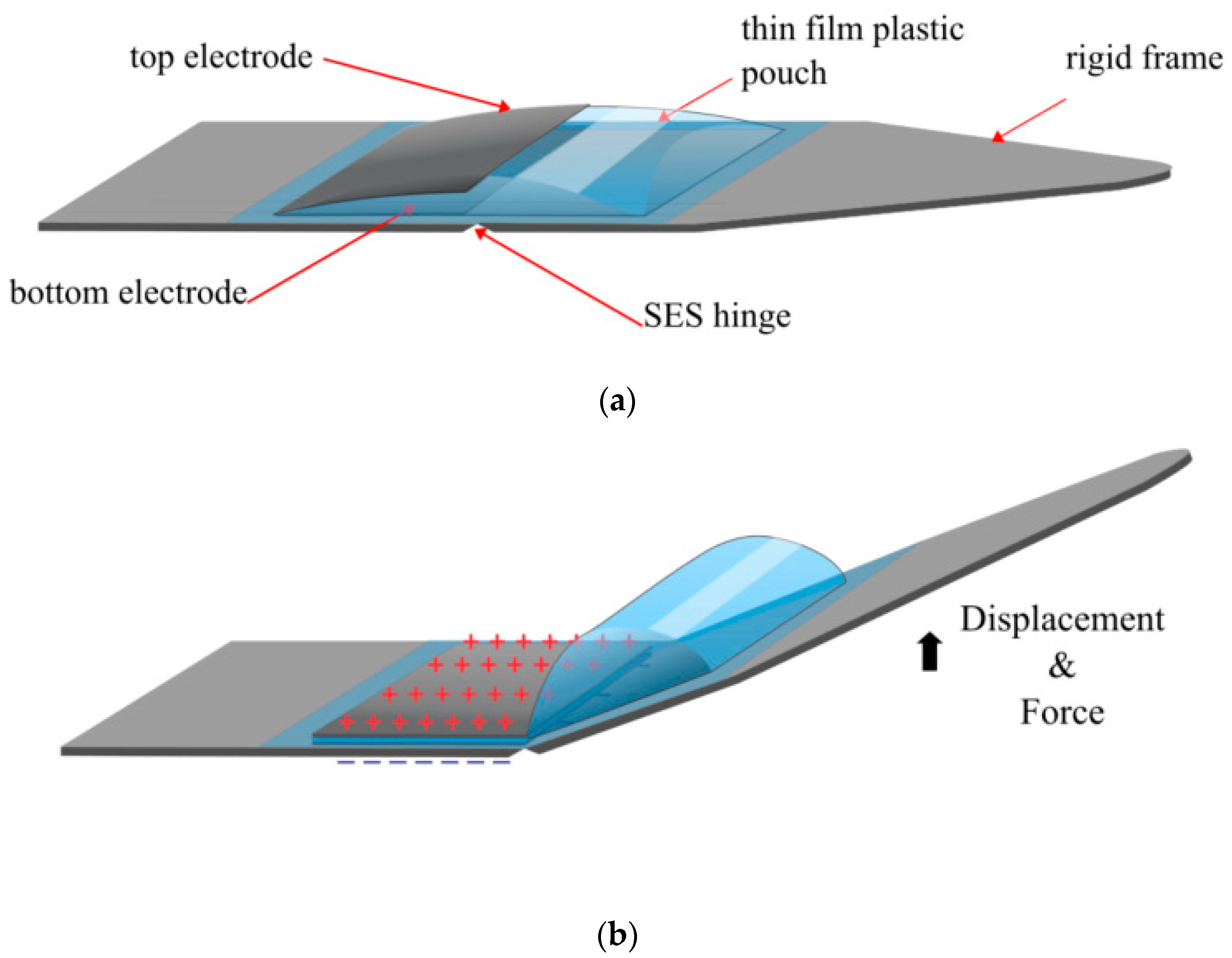
2.4. Electrohydraulic Hinge Joints
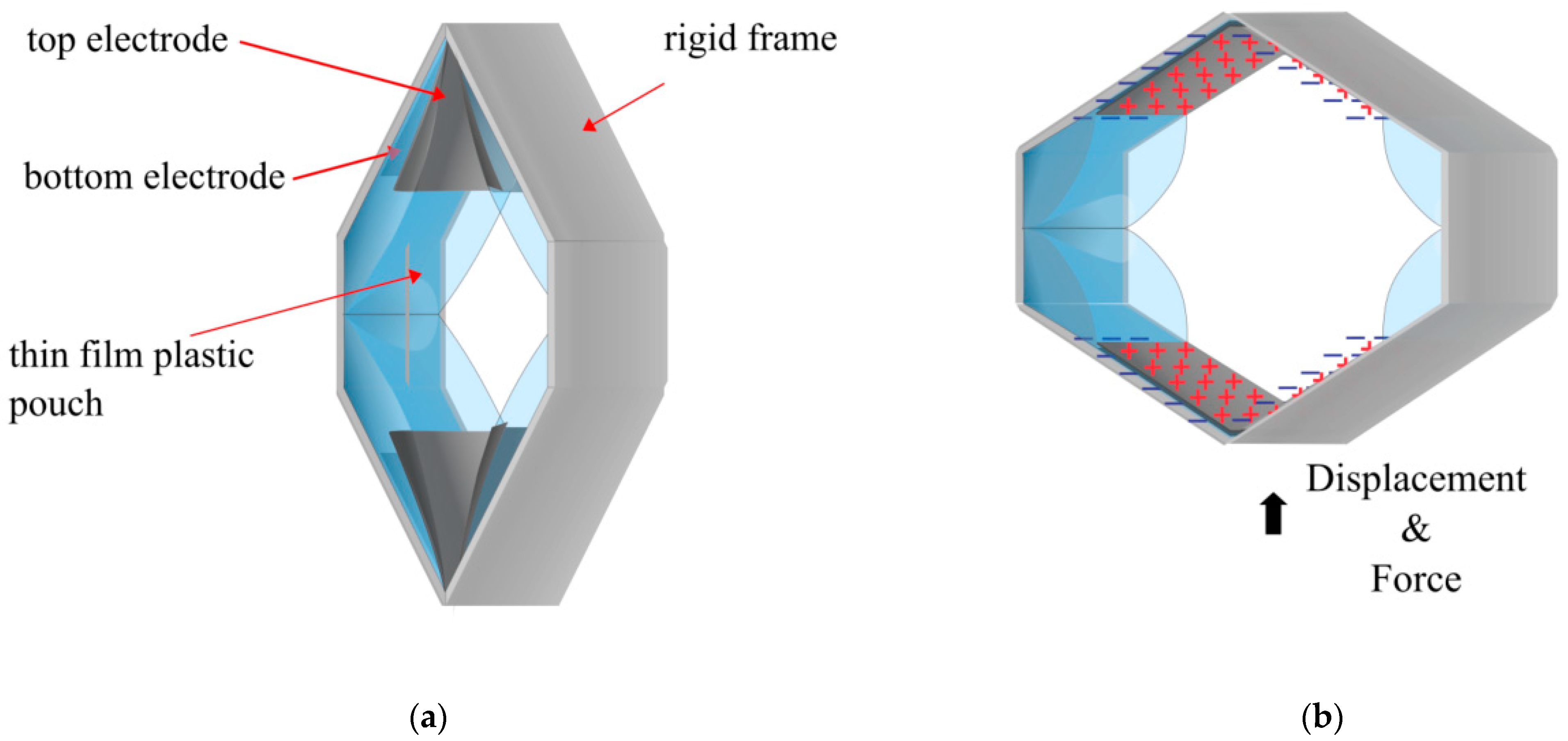
2.5. Annular Electrohydraulic Actuator
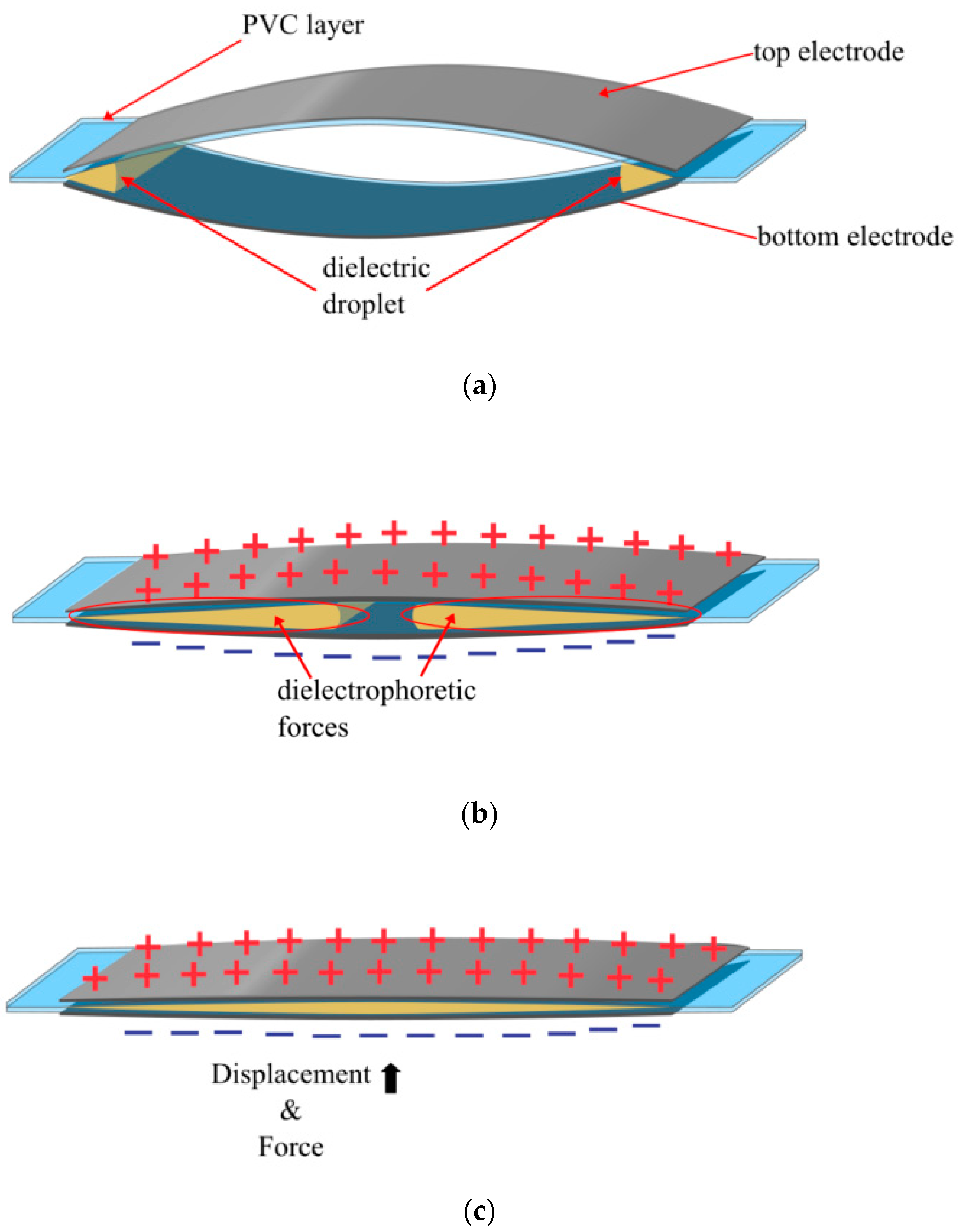
2.6. Electro-Ribbon Actuator
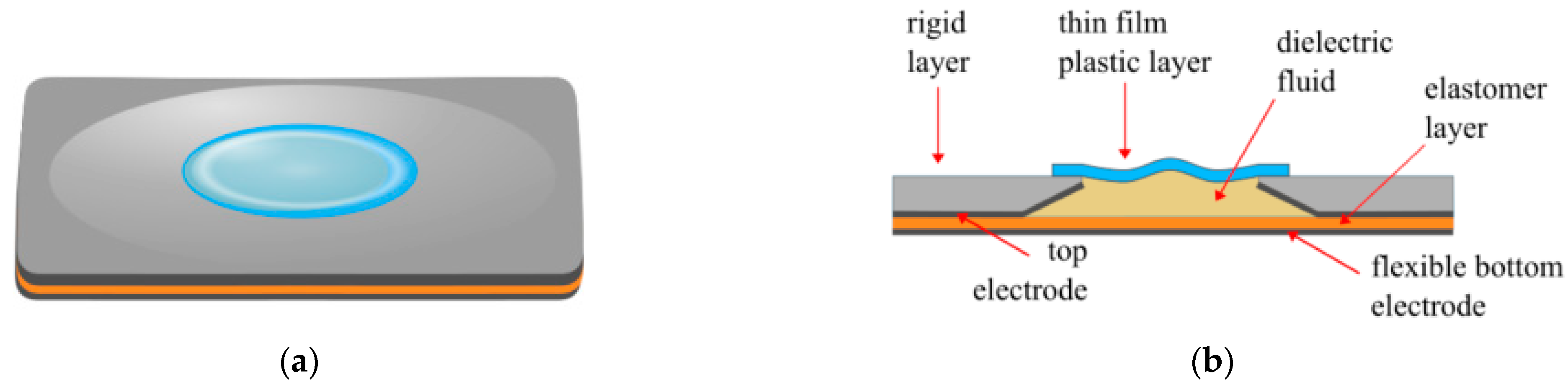
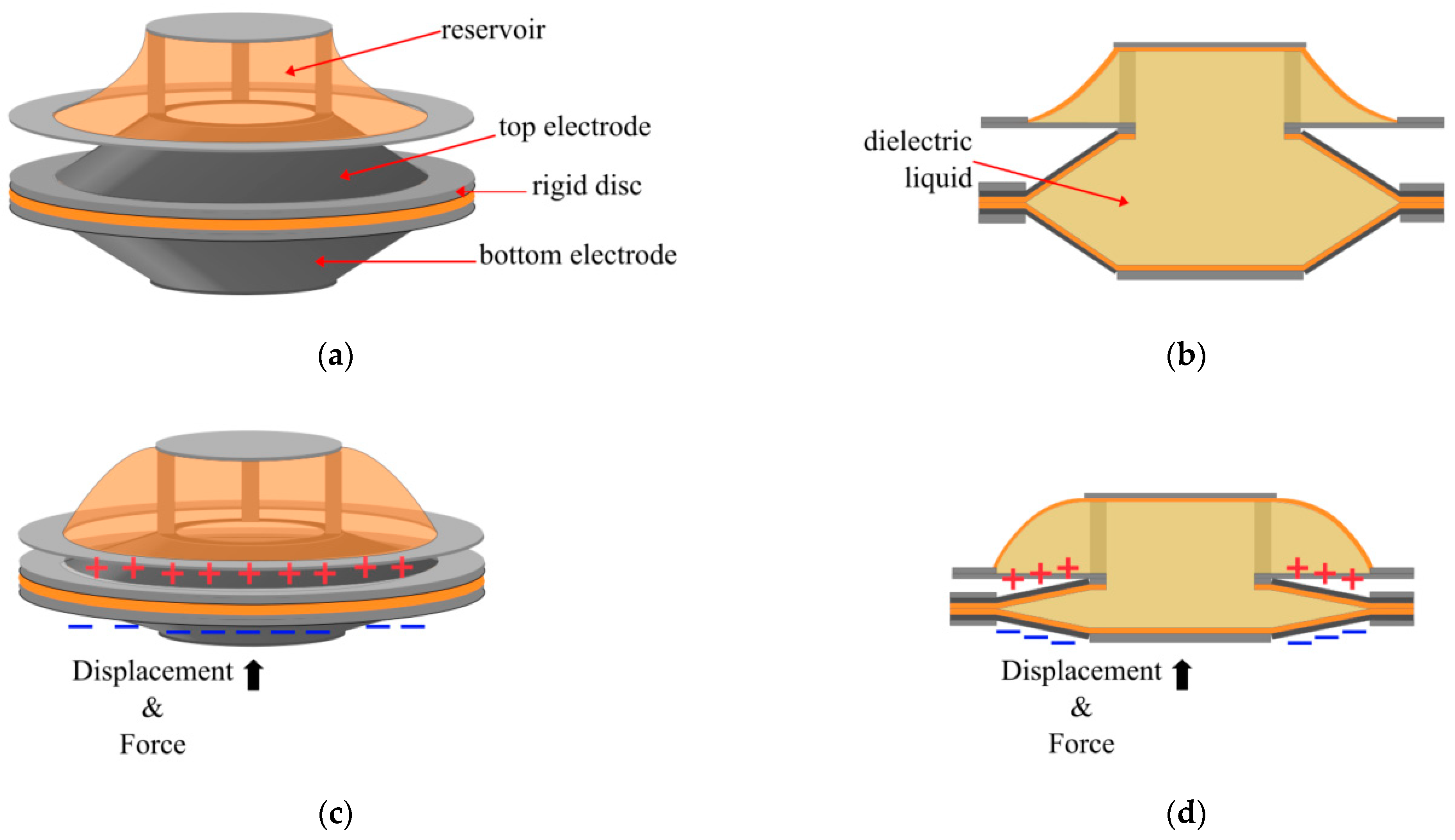
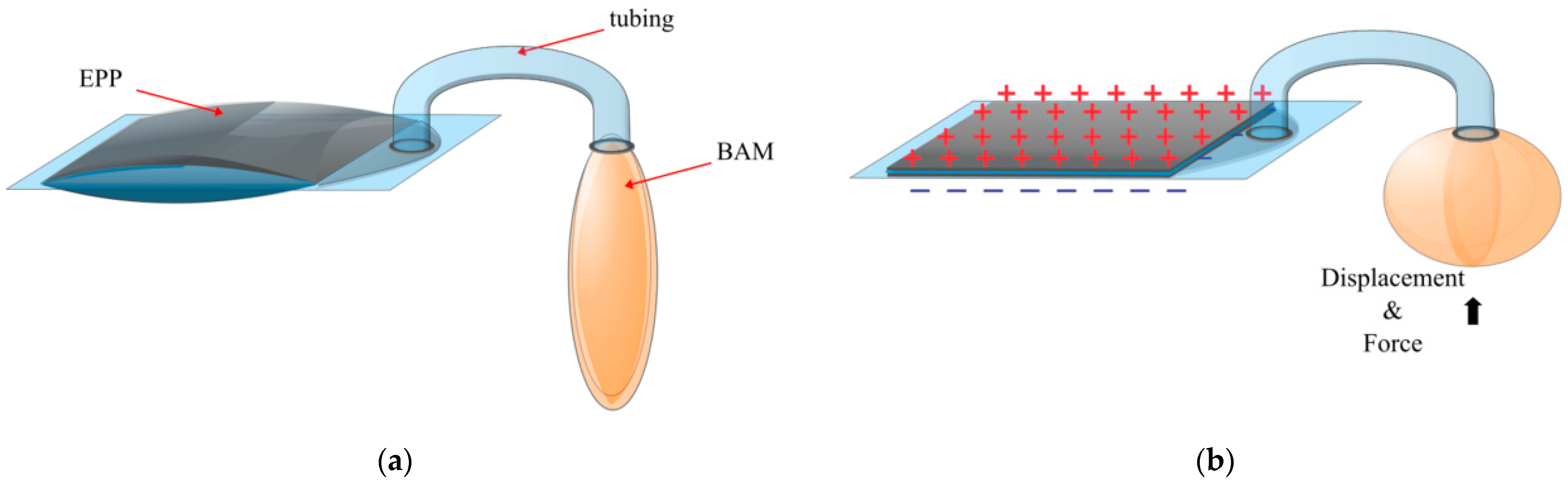
2.7. Electrohydraulic Actuators with a Reservoir
Dielectrophertic Actuator with a Reservoir
3. Discussion
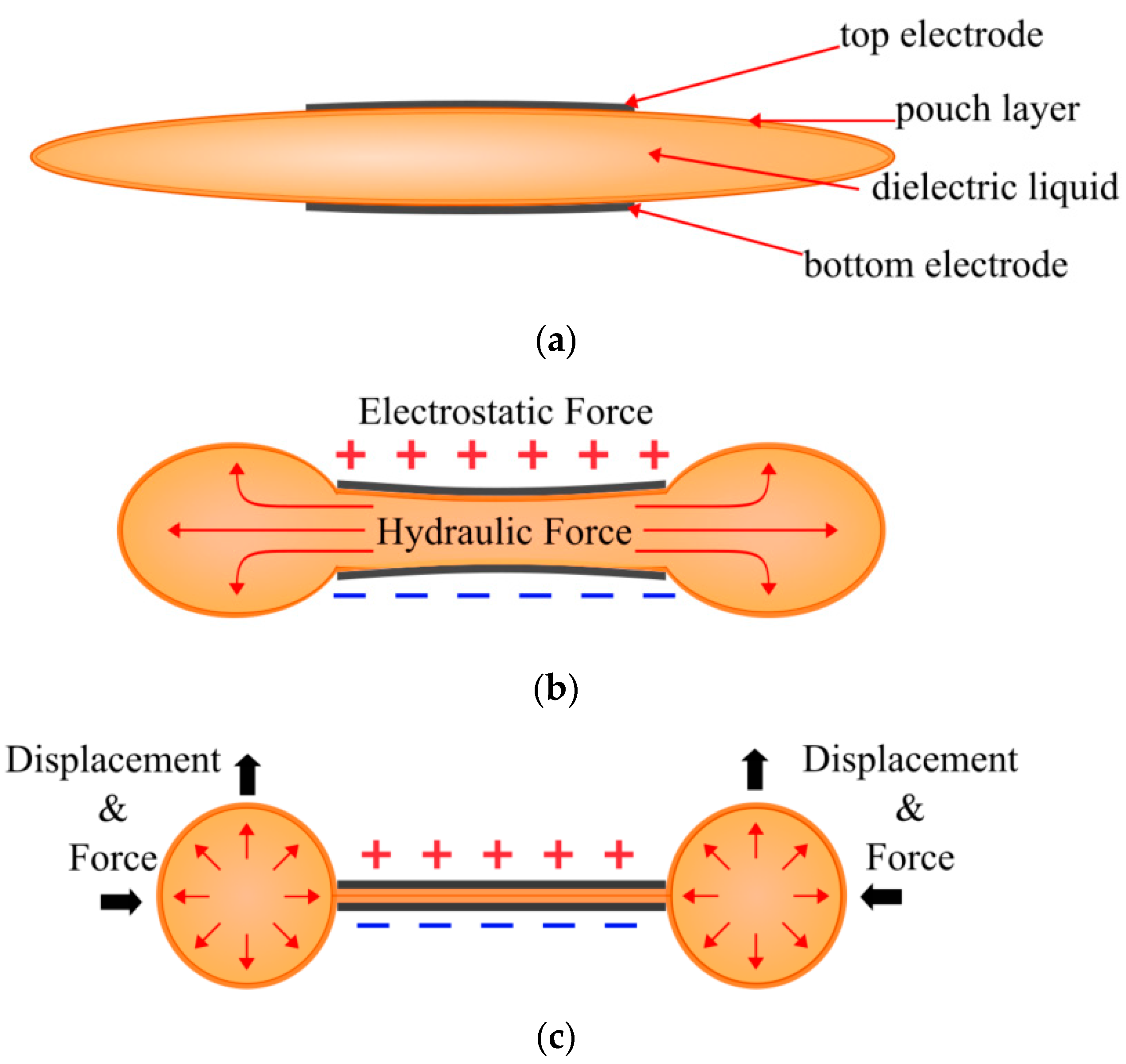
3.1. Expanding Electrohydraulic Actuators
3.2. Contracting Electrohydraulic Actuators
3.3. Electrostatic Force Analysis
3.4. Dielectric Pouch Materials
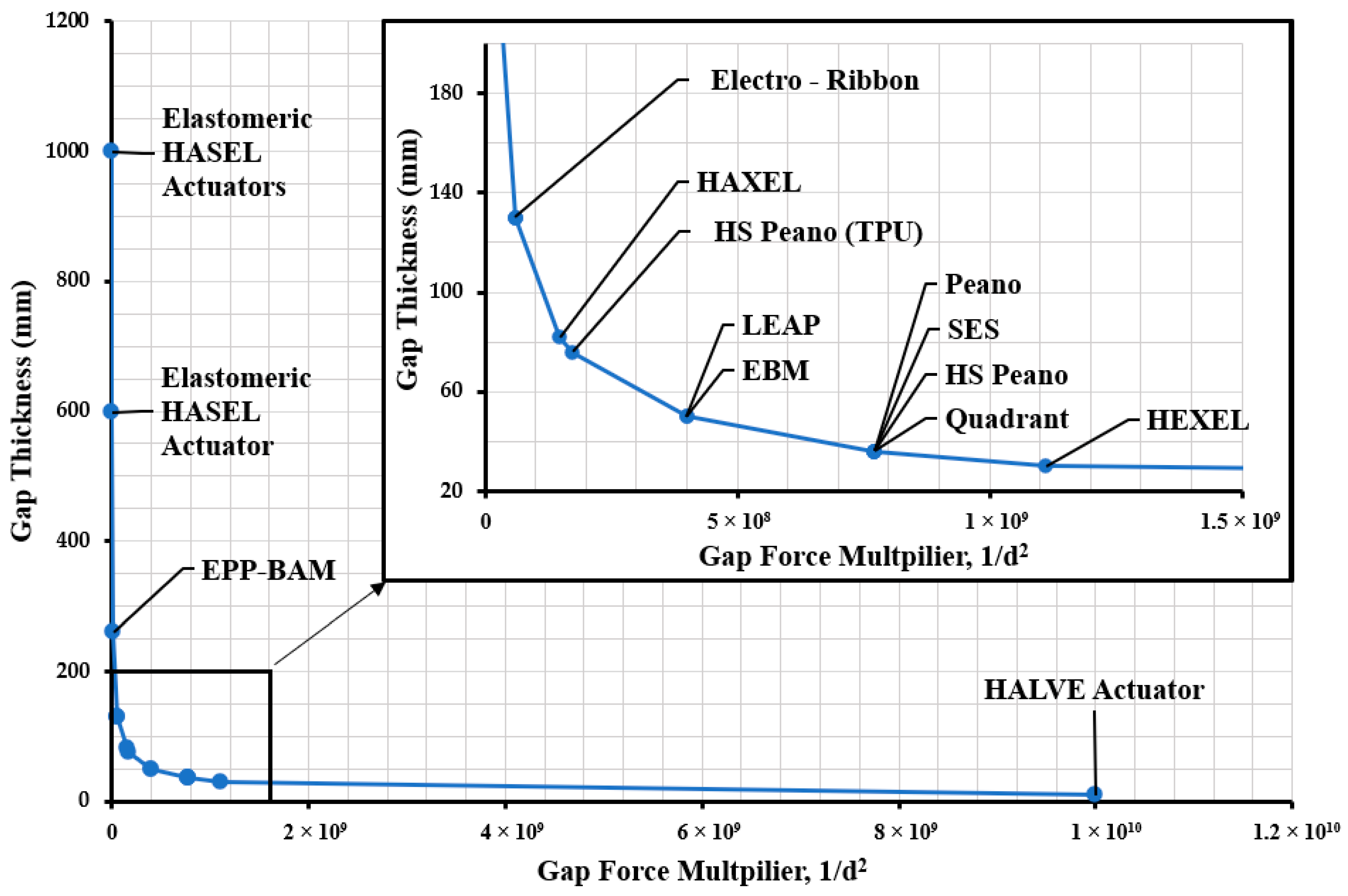
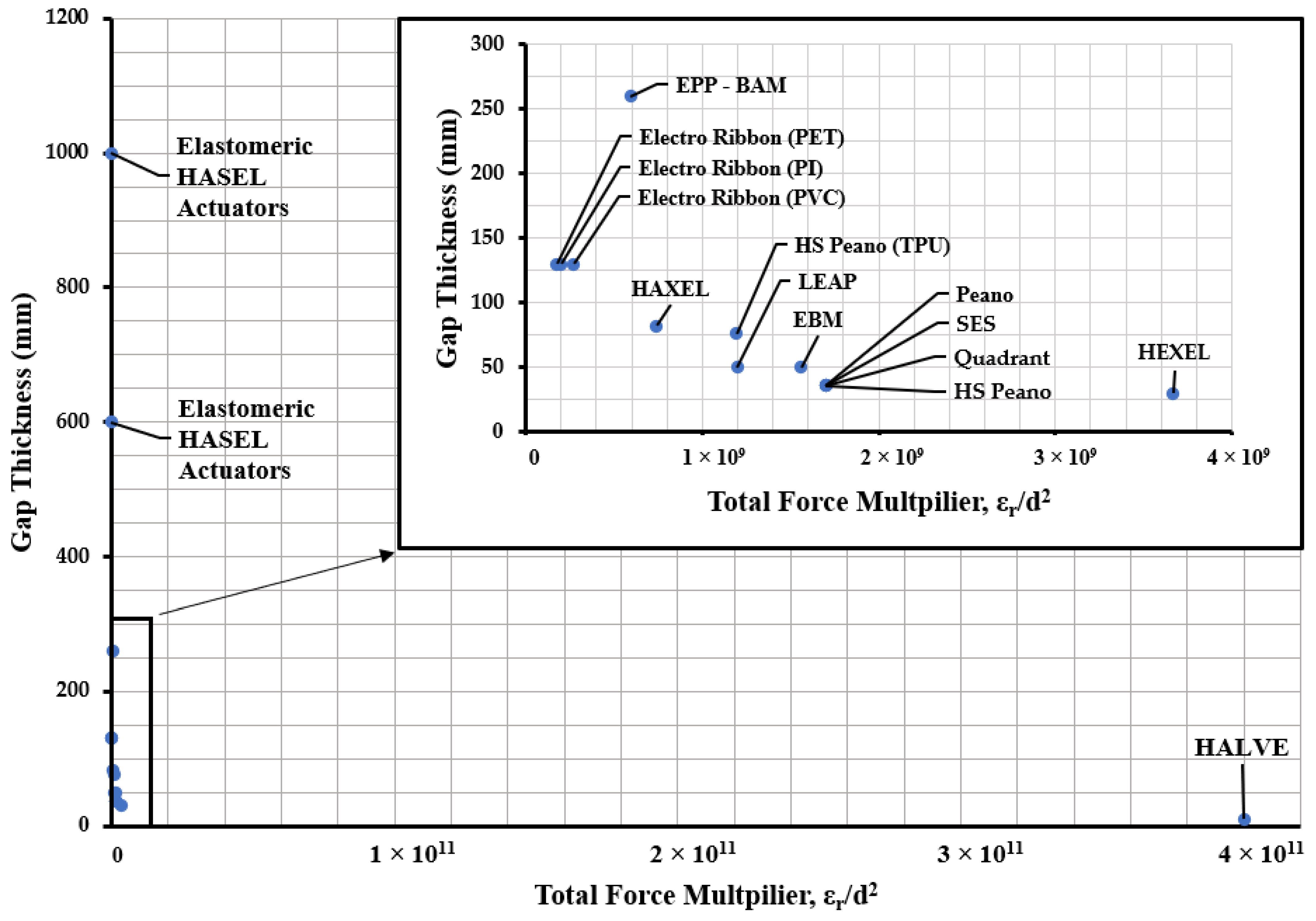
3.5. Dielectric Pouch Thickness
3.6. Electrostatic Force in Electrohydraulic Actuators
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Polygerinos, P. Editorial: Influential voices in soft robotics. Front. Robot. AI 2024, 11, 1521226. [Google Scholar] [CrossRef] [PubMed]
- AboZaid, Y.A.; Aboelrayat, M.T.; Fahim, I.S.; Radwan, A.G. Soft robotic grippers: A review on technologies, materials, and applications. Sens. Actuators A Phys. 2024, 372, 115380. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Mushtaq, R.T.; Wei, Q. Advancements in Soft Robotics: A Comprehensive Review on Actuation Methods, Materials, and Applications. Polymers 2024, 16, 1087. [Google Scholar] [CrossRef] [PubMed]
- Acome, E.; Mitchell, S.K.; Morrissey, T.G.; Emmett, M.B.; Benjamin, C.; King, M.; Radakovitz, M.; Keplinger, C. Hydraulically amplified self-healing electrostatic actuators with muscle-like performance. Sci. (Am. Assoc. Adv. Sci.) 2018, 359, 61–65. [Google Scholar] [CrossRef]
- Kellaris, N.; Gopaluni Venkata, V.; Smith, G.M.; Mitchell, S.K.; Keplinger, C. Peano-HASEL actuators: Muscle-mimetic, electrohydraulic transducers that linearly contract on activation. Sci. Robot. 2018, 3, eaar3276. [Google Scholar] [CrossRef]
- Rothemund, P.; Kim, Y.; Heisser, R.H.; Zhao, X.; Shepherd, R.F.; Keplinger, C. Shaping the future of robotics through materials innovation. Nat. Mater. 2021, 20, 1582–1587. [Google Scholar] [CrossRef]
- Keplinger, C.M.A.; Eric, L.; Kellaris, N.A.; Mitchell, S.K.; Emmett, M.B. Hydraulically Amplified Self-healing Electrostatic Actuators. U.S. Patent US20200032822, 21 March 2018. United States Patent and Trademark Office Pre-Granted Publication: Alexandria, VA, USA. [Google Scholar]
- Kirkman, S.; Rothemund, P.; Acome, E.; Keplinger, C. Electromechanics of planar HASEL actuators. Extrem. Mech. Lett. 2021, 48, 101408. [Google Scholar] [CrossRef]
- Keplinger, C.M.A.; Eric, L.; Kellaris, N.A.; Mitchell, S.K.; Morrissey, T.G. Hydraulically Amplified Self-Healing Electrostatic Transducers Harnessing Zipping Mechanism. U.S. Patent US20210003149, 4 March 2018. United States Patent and Trademark Office Pre-Granted Publication: Alexandria, VA, USA. [Google Scholar]
- Gupta, C.; Hogenboom, W.; Jayawardhana, B.; Kottapalli, A.G.P. Inkjet-printed Electrohydraulic Actuator. In Proceedings of the 2024 IEEE SENSORS, Kobe, Japan, 20–23 October 2024; pp. 1–4. [Google Scholar]
- Washington, A.; Su, J.; Kim, K.J. Actuation Behavior of Hydraulically Amplified Self-Healing Electrostatic (HASEL) Actuator via Dimensional Analysis. Actuators 2023, 12, 208. [Google Scholar] [CrossRef]
- Kellaris, N.; Venkata, V.G.; Rothemund, P.; Keplinger, C. An analytical model for the design of Peano-HASEL actuators with drastically improved performance. Extrem. Mech. Lett. 2019, 29, 100449. [Google Scholar] [CrossRef]
- Rothemund, P.; Kellaris, N.; Keplinger, C. How inhomogeneous zipping increases the force output of Peano-HASEL actuators. Extrem. Mech. Lett. 2019, 31, 100542. [Google Scholar] [CrossRef]
- Wang, X.; Mitchell, S.K.; Rumley, E.H.; Rothemund, P.; Keplinger, C. High-Strain Peano-HASEL Actuators. Adv. Funct. Mater. 2020, 30, 1908821. [Google Scholar] [CrossRef]
- Rothemund, P.; Kirkman, S.; Keplinger, C. Dynamics of electrohydraulic soft actuators. Proc. Natl. Acad. Sci. USA 2020, 117, 16207–16213. [Google Scholar] [CrossRef] [PubMed]
- Cisneros, N.; Wu, Y.; Rabenorosoa, K.; Le Gorrec, Y. Port-Hamiltonian modeling and control of a curling HASEL actuator⁎⁎This work is supported by the EIPHI Graduate School (contract ANR-17-EURE-0002). IFAC-Pap. 2024, 58, 143–148. [Google Scholar] [CrossRef]
- Keplinger, C.M.; Wang, X.; Mitchell, S.K. High Strain Peano Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers. U.S. Patent US20210172460, 10 December 2020. United States Patent and Trademark Office Pre-Granted Publication: Alexandria, VA, USA. [Google Scholar]
- Gravert, S.-D.; Varini, E.; Kazemipour, A.; Michelis, M.Y.; Buchner, T.; Hinchet, R.; Katzschmann, R.K. Low-voltage electrohydraulic actuators for untethered robotics. Sci. Adv. 2024, 10, eadi9319. [Google Scholar] [CrossRef]
- Yoder, Z.; Macari, D.; Kleinwaks, G.; Schmidt, I.; Acome, E.; Keplinger, C. A Soft, Fast and Versatile Electrohydraulic Gripper with Capacitive Object Size Detection. Adv. Funct. Mater. 2023, 33, 2209080. [Google Scholar] [CrossRef]
- Lee, K.; Cha, Y. Quasi-static analysis of an electrohydraulic actuator for a soft gripper. Sens. Actuators A Phys. 2023, 352, 114214. [Google Scholar] [CrossRef]
- Yoder, Z.; Kellaris, N.; Chase-Markopoulou, C.; Ricken, D.; Mitchell, S.K.; Emmett, M.B.; Weir, R.F.F.; Segil, J.; Keplinger, C. Design of a High-Speed Prosthetic Finger Driven by Peano-HASEL Actuators. Front. Robot. AI 2020, 7, 586216. [Google Scholar] [CrossRef]
- Volchko, A.; Mitchell, S.K.; Scripps, T.G.; Turin, Z.; Humbert, J.S. Robust control of electrohydraulic soft robots. Front. Robot. AI 2024, 11, 1333837. [Google Scholar] [CrossRef]
- Lee, D.; Kwak, B.; Bae, J. Development of an Electro-hydraulic Soft Zipping Actuator with Self-sensing Mechanism. J. Korea Robot. Soc. 2021, 16, 79–85. [Google Scholar] [CrossRef]
- Xiong, Q.; Zhou, X.; Li, D.; Ambrose, J.W.; Yeow, R.C.-H. An Amphibious Fully-Soft Centimeter-Scale Miniature Crawling Robot Powered by Electrohydraulic Fluid Kinetic Energy. Adv. Sci. 2024, 11, 2308033. [Google Scholar] [CrossRef]
- Ly, K.; Mayekar, J.V.; Aguasvivas, S.; Keplinger, C.; Rentschler, M.E.; Correll, N. Electro-Hydraulic Rolling Soft Wheel: Design, Hybrid Dynamic Modeling, and Model Predictive Control. IEEE Trans. Robot. 2022, 38, 3044–3063. [Google Scholar] [CrossRef]
- Chen, R.; Yuan, Z.; Guo, J.; Bai, L.; Zhu, X.; Liu, F.; Pu, H.; Xin, L.; Peng, Y.; Luo, J.; et al. Legless soft robots capable of rapid, continuous, and steered jumping. Nat. Commun. 2021, 12, 7028. [Google Scholar] [CrossRef] [PubMed]
- Shibuya, T.; Watanabe, S.; Shintake, J. Silicone-layered waterproof electrohydraulic soft actuators for bio-inspired underwater robots. Front. Robot. AI 2024, 11, 1298624. [Google Scholar] [CrossRef] [PubMed]
- Buchner, T.J.K.; Fukushima, T.; Kazemipour, A.; Gravert, S.-D.; Prairie, M.; Romanescu, P.; Arm, P.; Zhang, Y.; Wang, X.; Zhang, S.L.; et al. Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion. Nat. Commun. 2024, 15, 7634. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Sun, Z.; Xiang, Y.; Zhao, J. A Worm-like Soft Robot Based on Adhesion-Controlled Electrohydraulic Actuators. Biomimetics 2024, 9, 776. [Google Scholar] [CrossRef]
- Hess, I.; Musgrave, P. A continuum soft robotic trout with embedded HASEL actuators: Design, fabrication, and swimming kinematics. Smart Mater. Struct. 2024, 33, 105043. [Google Scholar] [CrossRef]
- Kang, J.; Kim, S.; Cha, Y. Soft origami tripod based on electrohydraulic actuator for multimodal motions. Sens. Actuators A Phys. 2024, 372, 115334. [Google Scholar] [CrossRef]
- Kim, S.; Oh, Y.; Kang, J.; Cha, Y. Design of an Accordion-Fold-Inspired Soft Electrohydraulic Actuator for Angular Motion. IEEE Robot. Autom. Lett. 2024, 9, 4750–4757. [Google Scholar] [CrossRef]
- Kim, S.; Cha, Y. Double-layered electrohydraulic actuator for bi-directional bending motion of soft gripper. In Proceedings of the 2021 18th International Conference on Ubiquitous Robots (UR), Gangneung, Republic of Korea, 12–14 July 2021; pp. 645–649. [Google Scholar]
- Sanchez-Tamayo, N.; Yoder, Z.; Rothemund, P.; Ballardini, G.; Keplinger, C.; Kuchenbecker, K.J. Cutaneous Electrohydraulic (CUTE) Wearable Devices for Pleasant Broad-Bandwidth Haptic Cues. Adv. Sci. 2024, 11, 2402461. [Google Scholar] [CrossRef]
- Vogt, M.R.; Eberlein, M.; Christoph, C.C.; Baumann, F.; Bourquin, F.; Wende, W.; Schaub, F.; Kazemipour, A.; Katzschmann, R.K. High-Frequency Capacitive Sensing for Electrohydraulic Soft Actuators. In Proceedings of the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, United Arab Emirates, 14–18 October 2024; pp. 8299–8306. [Google Scholar]
- Christoph, C.C.; Kazemipour, A.; Vogt, M.R.; Zhang, Y.; Katzschmann, R.K. Self-Sensing Feedback Control of an Electrohydraulic Robotic Shoulder. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 4679–4685. [Google Scholar]
- Kanno, R.; Caruso, F.; Takai, K.; Piskarev, Y.; Cacucciolo, V.; Shintake, J. Biodegradable Electrohydraulic Soft Actuators. Adv. Intell. Syst. 2023, 5, 2200239. [Google Scholar] [CrossRef]
- Mitchell, S.K.; Wang, X.; Acome, E.; Martin, T.; Ly, K.; Kellaris, N.; Venkata, V.G.; Keplinger, C. An Easy-to-Implement Toolkit to Create Versatile and High-Performance HASEL Actuators for Untethered Soft Robots. Adv. Sci. 2019, 6, 1900178. [Google Scholar] [CrossRef] [PubMed]
- Hainsworth, T.; Schmidt, I.; Sundaram, V.; Whiting, G.L.; Keplinger, C.; MacCurdy, R. Simulating Electrohydraulic Soft Actuator Assemblies Via Reduced Order Modeling. In Proceedings of the 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, UK, 4–8 April 2022; pp. 21–28. [Google Scholar]
- Kim, S.; Kang, J.; Yoo, S.; Cha, Y. Spring toy-inspired soft robots with electrohydraulic actuators. Sci. Rep. 2024, 14, 20011. [Google Scholar] [CrossRef] [PubMed]
- Xiong, Q.; Tan, G.; Zhou, X.; Li, D.; Yeow, R.C.H. AC Square Wave Voltage-Driven Series Elastic Electrohydraulic Actuator with Stable and Smooth Displacement Output for Robotic Applications. IEEE/ASME Trans. Mechatron. 2024, 1–12. [Google Scholar] [CrossRef]
- Kim, S.; Cha, Y. Electrohydraulic actuator based on multiple pouch modules for bending and twisting. Sens. Actuators A Phys. 2022, 337, 113450. [Google Scholar] [CrossRef]
- Chen, R.; Zhu, X.; Yuan, Z.; Pu, H.; Luo, J.; Sun, Y. A Bioinspired Single Actuator-Driven Soft Robot Capable of Multistrategy Locomotion. IEEE Trans. Robot. 2024, 40, 2149–2165. [Google Scholar] [CrossRef]
- Kellaris, N.; Rothemund, P.; Zeng, Y.; Mitchell, S.K.; Smith, G.M.; Jayaram, K.; Keplinger, C. Spider-Inspired Electrohydraulic Actuators for Fast, Soft-Actuated Joints. Adv. Sci. 2021, 8, 2100916. [Google Scholar] [CrossRef] [PubMed]
- Keplinger, C.M.A.; Eric, L.; Kellaris, N.A.; Mitchell, S.K.; Emmett, M.B. Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers. U.S. Patent US20240052859, 12 October 2023. United States Patent and Trademark Office Pre-Granted Publication: Alexandria, VA, USA. [Google Scholar]
- Tscholl, D.; Gravert, S.-D.; Appius, A.X.; Katzschmann, R.K. Flying Hydraulically Amplified Electrostatic Gripper System for Aerial Object Manipulation. In Proceedings of the Robotics Research, New York, NY, USA, 8 March 2023; Springer: Cham, Switzerland, 2023; pp. 368–383. [Google Scholar]
- Wang, T.; Joo, H.-J.; Song, S.; Hu, W.; Keplinger, C.; Sitti, M. A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation. Sci. Adv. 2023, 9, eadg0292. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Li, W.; Liu, F.; Chen, P.; Zhu, H.; Li, H.; Li, G.; Tao, K.; Zhang, W.; Xu, J. A Manta Ray-Inspired Fast-Swimming Soft Electrohydraulic Robotic Fish. IEEE Robot. Autom. Lett. 2024, 9, 8043–8050. [Google Scholar] [CrossRef]
- Lin, H.; Chen, Y.; Tang, W. Soft Electrohydraulic Bending Actuators for Untethered Underwater Robots. Actuators 2024, 13, 214. [Google Scholar] [CrossRef]
- Purnendu; Acome, E.; Keplinger, C.; Gross, M.; Bruns, C.; Leithinger, D. Soft Electrohydraulic Actuators for Origami Inspired Shape-Changing Interfaces; Association for Computing Machinery: New York, NY, USA, 2021; pp. 1–6. [Google Scholar]
- Purnendu; Novack, S.; Acome, E.; Keplinger, C.; Alistar, M.; Gross, M.; Bruns, C.; Leithinger, D. Electriflow: Soft Electrohydraulic Building Blocks for Prototyping Shape-Changing Interfaces; Association for Computing Machinery: New York, NY, USA, 2021; pp. 1280–1290. [Google Scholar]
- Kim, S.; Cha, Y. A soft crawling robot with a modular design based on electrohydraulic actuator. iScience 2023, 26, 106726. [Google Scholar] [CrossRef]
- Rumley, E.H.; Preninger, D.; Shagan Shomron, A.; Rothemund, P.; Hartmann, F.; Baumgartner, M.; Kellaris, N.; Stojanovic, A.; Yoder, Z.; Karrer, B.; et al. Biodegradable electrohydraulic actuators for sustainable soft robots. Sci. Adv. 2023, 9, eadf5551. [Google Scholar] [CrossRef] [PubMed]
- Yoder, Z.; Rumley, E.H.; Schmidt, I.; Rothemund, P.; Keplinger, C. Hexagonal electrohydraulic modules for rapidly reconfigurable high-speed robots. Sci. Robot. 2024, 9, eadl3546. [Google Scholar] [CrossRef]
- Leroy, E.; Hinchet, R.; Shea, H. Multimode Hydraulically Amplified Electrostatic Actuators for Wearable Haptics. Adv. Mater. 2020, 32, e2002564. [Google Scholar] [CrossRef] [PubMed]
- Leroy, E.; Shea, H. Hydraulically Amplified Electrostatic Taxels (HAXELs) for Full Body Haptics. Adv. Mater. Technol. 2023, 8, 2300242. [Google Scholar] [CrossRef]
- Leroy, E.; Shea, H.; Gao, M. Hydraulically Amplified Dielectric Actuator Taxels. U.S. Patent US11372481, 14 October 2021. United States Patent and Trademark Office Granted Patent: Alexandria, VA, USA. [Google Scholar]
- Schlatter, S.; Grasso, G.; Rosset, S.; Shea, H. Inkjet Printing of Complex Soft Machines with Densely Integrated Electrostatic Actuators. Adv. Intell. Syst. 2020, 2, 2000136. [Google Scholar] [CrossRef]
- Schlatter, S. Inkjet Printing of Soft Machines; EPFL: Lausanne, Switzerland, 2020. [Google Scholar]
- Duranti, M.; Righi, M.; Vertechy, R.; Fontana, M. A new class of variable capacitance generators based on the dielectric fluid transducer. Smart Mater. Struct. 2017, 26, 115014. [Google Scholar] [CrossRef]
- Sadeghi, M.; Kim, H.; Najafi, K. Electrostatically driven micro-hydraulic actuator arrays. In Proceedings of the 2010 IEEE 23rd International Conference on Micro Electro Mechanical Systems (MEMS), Hong Kong, China, 24–28 January 2010; pp. 15–18. [Google Scholar]
- Ion-Dan, S.; Giacomo, M.; Sandra, D.; Luca, F.; Rocco, V.; Devid, M.; Marco, F. Electrostatic actuator for tactile display based on hydraulically coupled dielectric fluids and soft structures. In Proceedings of the SPIE Smart Structures + Nondestructive Evaluation, Denver, CO, USA, 11–15 August 2019; p. 109662. [Google Scholar]
- Bluett, S.; Helps, T.; Taghavi, M.; Rossiter, J. Self-sensing Electro-ribbon Actuators. IEEE Robot. Autom. Lett. 2020, 5, 3931–3936. [Google Scholar] [CrossRef]
- Diteesawat, R.S.; Helps, T.; Taghavi, M.; Rossiter, J. Electro-pneumatic pumps for soft robotics. Sci. Robot. 2021, 6, eabc3721. [Google Scholar] [CrossRef]
- Taghavi, M.; Helps, T.; Rossiter, J. Characterisation of Self-locking High-contraction Electro-ribbon Actuators. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Virtual, 31 May–31 August 2020; pp. 5856–5861. [Google Scholar]
- Diteesawat, R.S.; Fishman, A.; Helps, T.; Taghavi, M.; Rossiter, J. Closed-Loop Control of Electro-Ribbon Actuators. Front. Robot. AI 2020, 7, 557624. [Google Scholar] [CrossRef]
- Taghavi, M.; Helps, T.; Rossiter, J. Electro-ribbon actuators and electro-origami robots. Sci. Robot. 2018, 3, eaau9795. [Google Scholar] [CrossRef]
- Baker, T.; Taghavi, M. Material and Structural Improvement in Electro-Ribbon Actuators Towards Biomimetic Stacked Architecture. In Proceedings of the 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft), San Diego, CA, USA, 14–17 April 2024; pp. 473–478. [Google Scholar]
- Sîrbu, I.D.; Moretti, G.; Bortolotti, G.; Bolignari, M.; Diré, S.; Fambri, L.; Vertechy, R.; Fontana, M. Electrostatic bellow muscle actuators and energy harvesters that stack up. Sci. Robot. 2021, 6, eaaz5796. [Google Scholar] [CrossRef] [PubMed]
- Diteesawat, R.S.; Helps, T.; Taghavi, M.; Rossiter, J. Characteristic Analysis and Design Optimisation of Bubble Artificial Muscles (BAMs). Soft Robot. 2020, 8, 186–199. [Google Scholar] [CrossRef]
- Shao, Y.; Shagan Shomron, A.; Javot, B.; Keplinger, C.; Kuchenbecker, K.J. Wearable Electrohydraulic Actuation for Salient Full-Fingertip Haptic Feedback. Adv. Mater. Technol. 2025, 2401525. [Google Scholar] [CrossRef]
- Purnendu; Hartcher-O’Brien, J.; Mehta, V.; Colonnese, N.; Gupta, A.; Bruns, C.J.; Agarwal, P. Fingertip Wearable High-resolution Electrohydraulic Interface for Multimodal Haptics. In Proceedings of the 2023 IEEE World Haptics Conference (WHC), Delft, The Netherlands, 10–13 July 2023; pp. 299–305. [Google Scholar]
- Tynan, L.; Gunawardana, U.; Liyanapathirana, R.; Perera, O.; Esposito, D.; Centracchio, J.; Gargiulo, G. Low-Cost High-Voltage Power Supply for Hydraulically Amplified Self-Healing Electrostatic Applications. Machines 2024, 12, 758. [Google Scholar] [CrossRef]
- Tynan, L.; Naik, G.; Gargiulo, G.; Gunawardana, U. Implementation of the Biological Muscle Mechanism in HASEL Actuators to Leverage Electrohydraulic Principles and Create New Geometries. Actuators 2021, 10, 38. [Google Scholar] [CrossRef]
- Sharma, P.K.; Chung, J.-Y. Evaluation of polydimethylsiloxane (PDMS) as a substrate for the realization of flexible/wearable antennas and sensors. Micromachines 2023, 14, 735. [Google Scholar] [CrossRef]
- Tan, D.Q.; Liu, Y.; Lin, X.; Huang, E.; Lin, X.; Wu, X.; Lin, J.; Luo, R.; Wang, T. Exploration of Breakdown Strength Decrease and Mitigation of Ultrathin Polypropylene. Polymers 2023, 15, 2257. [Google Scholar] [CrossRef] [PubMed]
- Xiao, M.; Zhang, M.; Liu, H.; Du, B.; Qin, Y. Dielectric property and breakdown strength performance of long-chain branched polypropylene for metallized film capacitors. Materials 2022, 15, 3071. [Google Scholar] [CrossRef] [PubMed]
- Duan, Y.; Zhao, Y.; Ma, G.; Sun, X.; Zhang, H.; Liu, W. Development and research trends of a polypropylene material in electrical engineering: A bibliometric mapping analysis and systematical review. Front. Energy Res. 2023, 10, 1051101. [Google Scholar] [CrossRef]
- He, X.; Zhou, J.; Jin, L.; Long, X.; Wu, H.; Xu, L.; Gong, Y.; Zhou, W. Improved dielectric properties of thermoplastic polyurethane elastomer filled with core–shell structured PDA@ TiC particles. Materials 2020, 13, 3341. [Google Scholar] [CrossRef] [PubMed]
- Gulrez, S.; Ali Mohsin, M.; Shaikh, H.; Anis, A.; Poulose, A.; Yadav, M.; Qua, P.; Al-Zahrani, S. A review on electrically conductive polypropylene and polyethylene. Polym. Compos. 2014, 35, 900–914. [Google Scholar] [CrossRef]
- Ahmed Dabbak, S.Z.; Illias, H.A.; Ang, B.C.; Abdul Latiff, N.A.; Makmud, M.Z.H. Electrical properties of polyethylene/polypropylene compounds for high-voltage insulation. Energies 2018, 11, 1448. [Google Scholar] [CrossRef]
- Mikac, L.; Csáki, A.; Zentai, B.; Rigó, I.; Veres, M.; Tolić, A.; Gotić, M.; Ivanda, M. UV Irradiation of Polyethylene Terephthalate and Polypropylene and Detection of Formed Microplastic Particles Down to 1 μm. ChemPlusChem 2024, 89, e202300497. [Google Scholar] [CrossRef] [PubMed]
- Watanabe, K.; Kaneko, M.; Zhong, X.; Takada, K.; Kaneko, T.; Kawai, M.; Mitsumata, T. Effect of Water Absorption on Electric Properties of Temperature-Resistant Polymers. Polymers 2024, 16, 521. [Google Scholar] [CrossRef] [PubMed]
- Chisca, S.; Sava, I.; Musteata, V.E.; Bruma, M. Dielectric and conduction properties of polyimide films. In Proceedings of the CAS 2011 Proceedings (2011 International Semiconductor Conference), Sinaia, Romania, 17–19 October 2011; pp. 253–256. [Google Scholar]
- Bahgat, A.A.; Sayyah, S.; Shalabi, H. Electrical Properties of Pure PVC. In Science and Technology of Polymers and Advanced Materials; Springer: Boston, MA, USA, 1998; pp. 421–428. [Google Scholar] [CrossRef]
- P S, L.P.; Swain, B.; Rajput, S.; Behera, S.; Parida, S. Advances in P(VDF-TrFE) Composites: A Methodical Review on Enhanced Properties and Emerging Electronics Applications. Condens. Matter 2023, 8, 105. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuator | University | Applied Voltage (kV) | Max. Free Strain (%) | Max. Blocking Force (N) | Peak Specific Power (W/kg) | Peak Average Specific Power (W/kg) | Specific Energy (J/Kg) |
|---|---|---|---|---|---|---|---|
| Elastomeric Donut HASEL actuator | University of Colorado Boulder | 21 | 40–50 | 2.45–3.92 | |||
| Planar HASEL actuator | University of Colorado Boulder | ~22.5 | 79 | 2.45–14.72 | 614 | 70 | |
| Three-stack Quadrant HASEL actuator | University of Colorado Boulder | 12 | 118 | ~60 * | 121 | >60 | 12 |
| HEXEL | University of Colorado Boulder | 9.5 | 113 | >2 | 90 | ~30 | |
| HAXEL | EPFL | 2 | 60 | 0.1–0.8 | 102 | 0.51 | |
| LEAP | University of Trento | 4.5 | 0.017 |
| Actuator | Institution | Applied Voltage (kV) | Max. Free Strain (%) | Max. Blocking Force (N) | Peak Specific Power (W/kg) | Peak Average Specific Power (W/kg) | Specific Energy (J/Kg) |
|---|---|---|---|---|---|---|---|
| Three-stack Peano HASEL actuator | University of Colorado Boulder | 10 | 9–15 | 9.81–60 | 160 | >50 | 4.93 |
| HS Peano HASEL actuator | University of Colorado Boulder | 10 | 24 | 18 | ~120 | ~78 | 4.03 |
| SES | University of Colorado Boulder | 9 | 230 | 110 | 10.3 | ||
| HEXEL | University of Colorado Boulder | 9.5 | 47.7 | 37.6 | 122 | 2.3 | |
| Three–Six series EBM | University of Trento | 8 | 43 | ~7 * | 31 | ||
| Electro-ribbon Actuator | University of Bristol | 10 | >99 | 0.172 * | |||
| EPP-BAM | University of Bristol | 10 | 32.4 | 0.981 * | 112.16 | 2.59 | |
| HALVE actuator | ETH Zürich | 1.1 | 9 | 5 * | 50.5 |
| Actuator | Institution | Dielectric Material | Dielectric Thickness (µm) | Dielectric Layers | Total Dielectric Gap (µm) | Relative Permittivity | Compliant/Elastomeric |
|---|---|---|---|---|---|---|---|
| Elastomeric Donut HASEL Actuator | University of Colorado Boulder | Ecoflex | 500 | 2 | 1000 | 2.3–3 | Elastomeric |
| PDMS | 300 | 2 | 600 | 2.3–3 | Elastomeric | ||
| Elastomeric Donut HASEL Actuator | University of Colorado Boulder | Ecoflex | 500 | 2 | 1000 | 2.3–3 | Elastomeric |
| PDMS | 300 | 2 | 600 | 2.3–3 | Elastomeric | ||
| Peano HASEL actuator | University of Colorado Boulder | BOPP | 18–21 | 2 | 42 | 2.2 | Compliant |
| HS Peano HASEL Actuator | University of Colorado Boulder | BOPP | 18 | 2 | 36 | 2.2 | Compliant |
| TPU | 38 | 2 | 76 | 6.9 | Elastomeric | ||
| Quadrant HASEL Actuator | University of Colorado Boulder | BOPP | 18 | 2 | 36 | 2.2 | Compliant |
| SES | University of Colorado Boulder | BOPP | 18 | 2 | 36 | 2.2 | Compliant |
| HEXEL | University of Colorado Boulder | PET | 15–30 | 2 | 30–60 | 3.3 | Compliant |
| HAXEL | EPFL | PET | 12 50–100 * | 1 1 | 82–132 | 3.3 | Compliant |
| PVDF-TrFE-CTFE, | 5 15 * | 1 1 | 38 | Compliant | |||
| LEAP | University of Trento | PDMS | 50 | 1 | 50 | 2.3–3 | Elastomeric |
| EBM | University of Trento | PI | 25 | 2 | 50 | 3.9 | Compliant |
| Electro-ribbon Actuator | University of Bristol | PET | 130 | 1 | 130 | 3–3.4 | Compliant |
| PI | 130 | 1 | 130 | 3.4–3.5 | Compliant | ||
| PVC | 130 | 1 | 130 | 4.62 | Compliant | ||
| EPP-BAM | University of Bristol | PVDF-TrFE-CTFE | 130 | 2 | 260 | 40 | Compliant |
| HALVE Actuator | ETH Zürich | PVDF-TrFE-CTFE | 5 | 2 | 10 | 40 | Compliant |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tynan, L.; Gunawardana, U.; Liyanapathirana, R.; Perera, O.; Esposito, D.; Centracchio, J.; Gargiulo, G. Review of Electrohydraulic Actuators Inspired by the HASEL Actuator. Biomimetics 2025, 10, 152. https://doi.org/10.3390/biomimetics10030152
Tynan L, Gunawardana U, Liyanapathirana R, Perera O, Esposito D, Centracchio J, Gargiulo G. Review of Electrohydraulic Actuators Inspired by the HASEL Actuator. Biomimetics. 2025; 10(3):152. https://doi.org/10.3390/biomimetics10030152
Chicago/Turabian StyleTynan, Levi, Upul Gunawardana, Ranjith Liyanapathirana, Osura Perera, Daniele Esposito, Jessica Centracchio, and Gaetano Gargiulo. 2025. "Review of Electrohydraulic Actuators Inspired by the HASEL Actuator" Biomimetics 10, no. 3: 152. https://doi.org/10.3390/biomimetics10030152
APA StyleTynan, L., Gunawardana, U., Liyanapathirana, R., Perera, O., Esposito, D., Centracchio, J., & Gargiulo, G. (2025). Review of Electrohydraulic Actuators Inspired by the HASEL Actuator. Biomimetics, 10(3), 152. https://doi.org/10.3390/biomimetics10030152