
How to Keep Drivers Attentive during Level 2 Automation? Development and Evaluation of an HMI Concept Using Affective Elements and Message Framing


Abstract
:1. Introduction
- Does a time-based affective message concept improve drivers’ monitoring behavior (and NDRA engagement rate) compared to a baseline without affective messages?
- Does an affective message concept improve drivers’ reaction to a silent system malfunction compared to a baseline without affective messages?
2. Materials and Methods
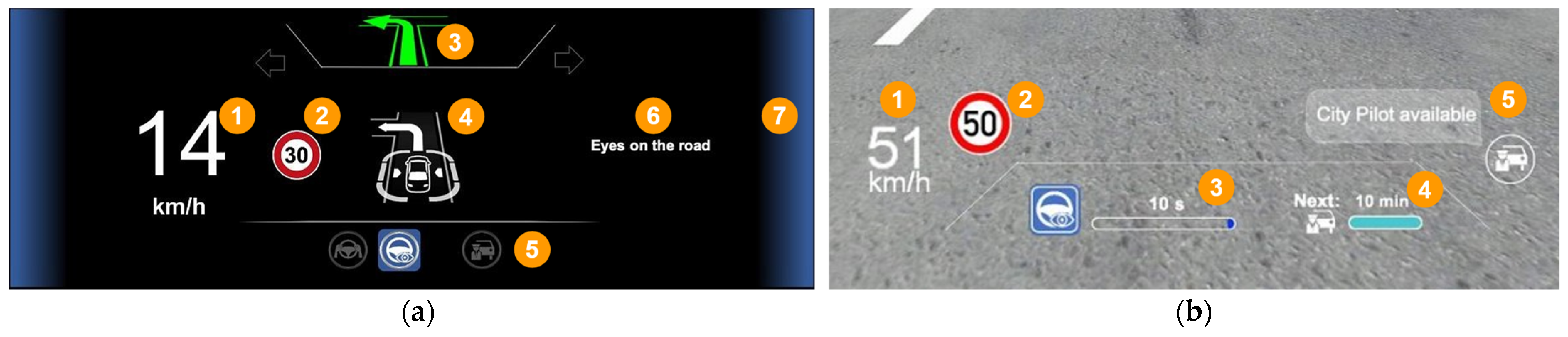
2.1. HMI Design
2.1.1. Baseline Concept
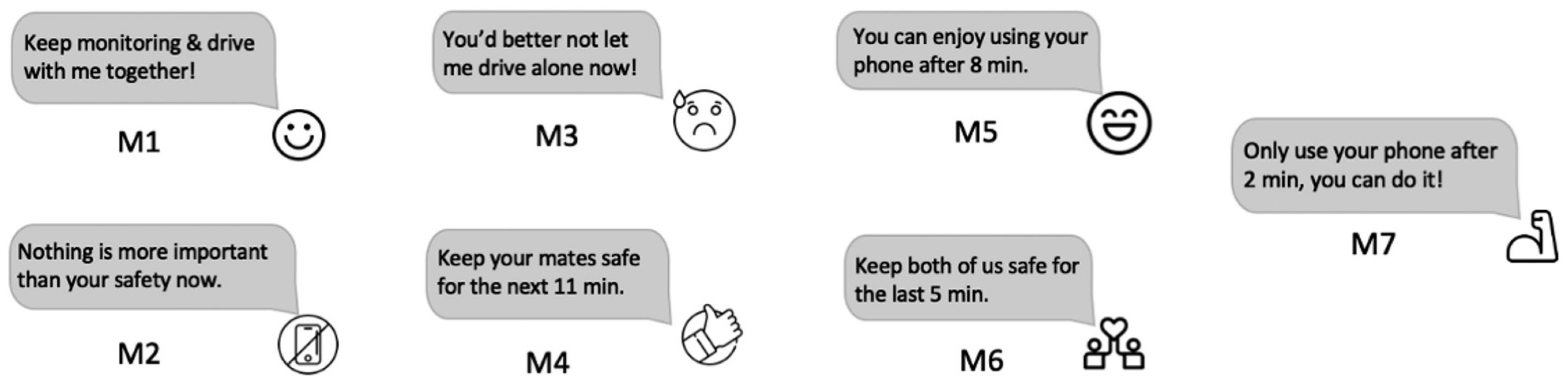
2.1.2. Affective Message Concept (AMC)
2.2. Method
2.2.1. Experimental Design
2.2.2. Dependent Variables
2.2.3. Apparatus
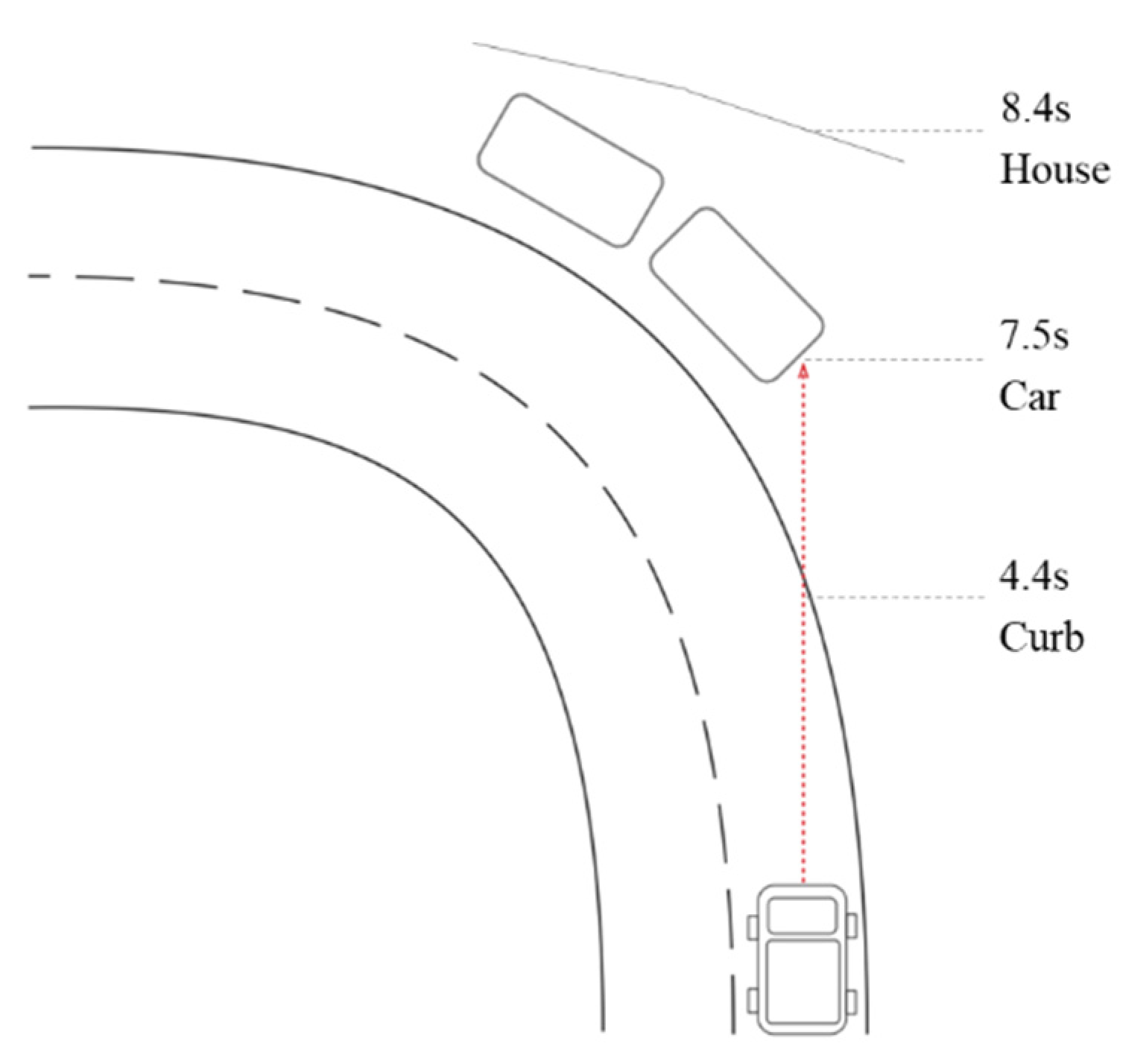
2.2.4. Experimental Track
2.2.5. Procedure and Instructions
2.2.6. Statistical Analysis
2.2.7. Sample
3. Results
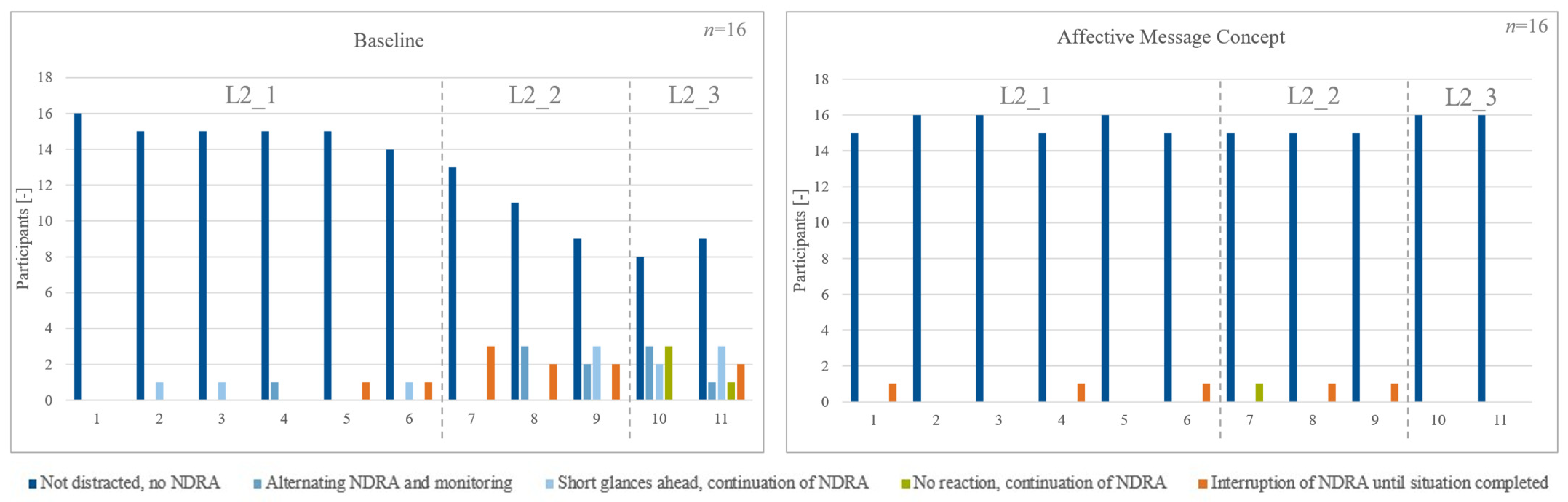
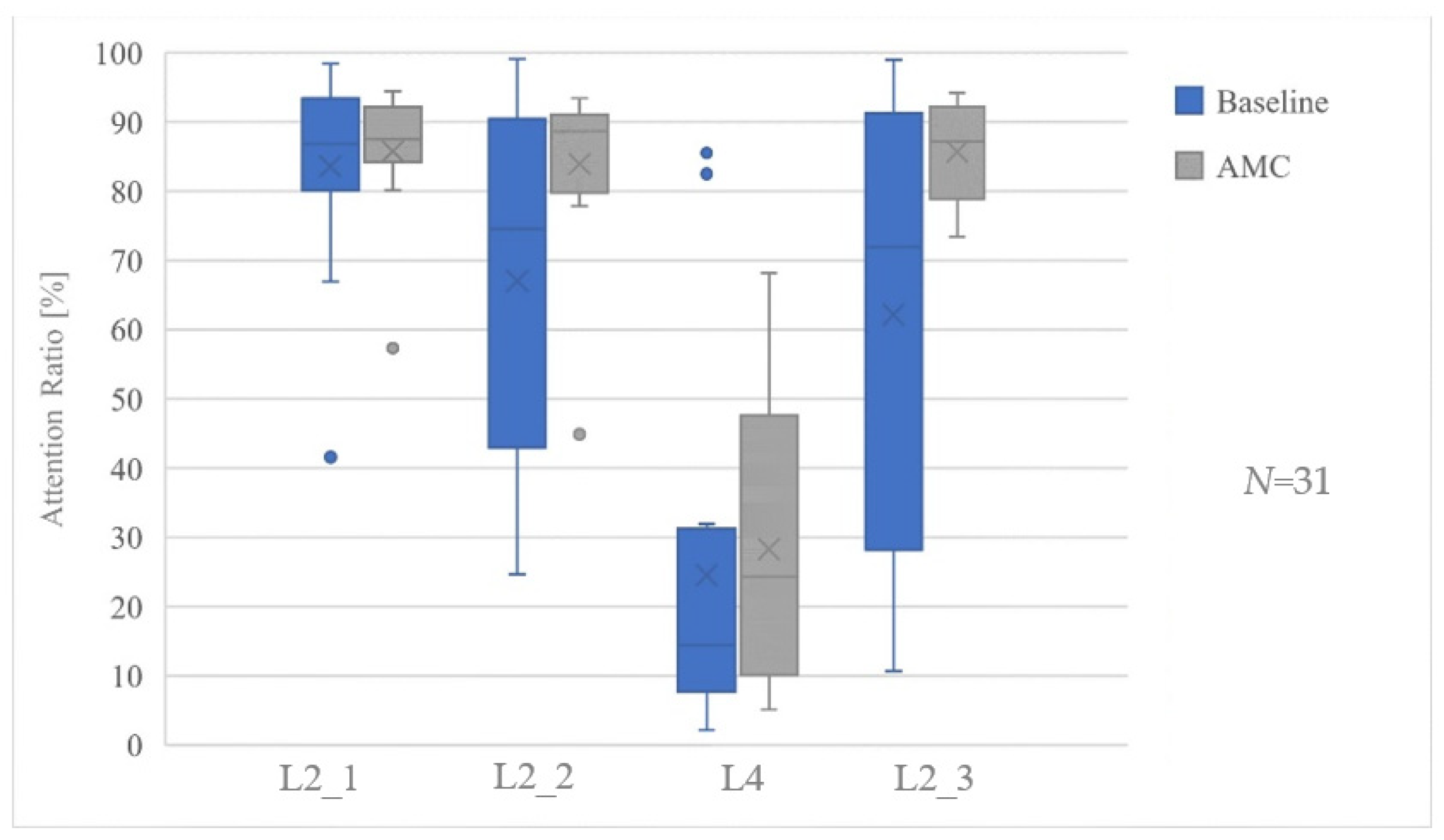
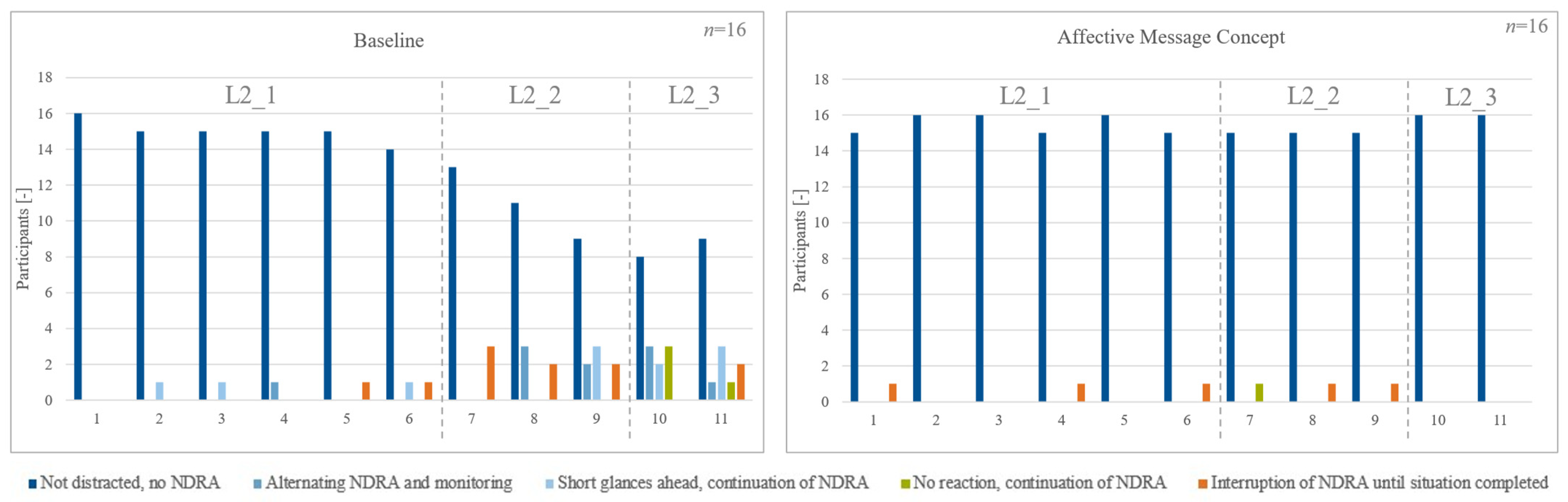
3.1. Monitoring Behavior
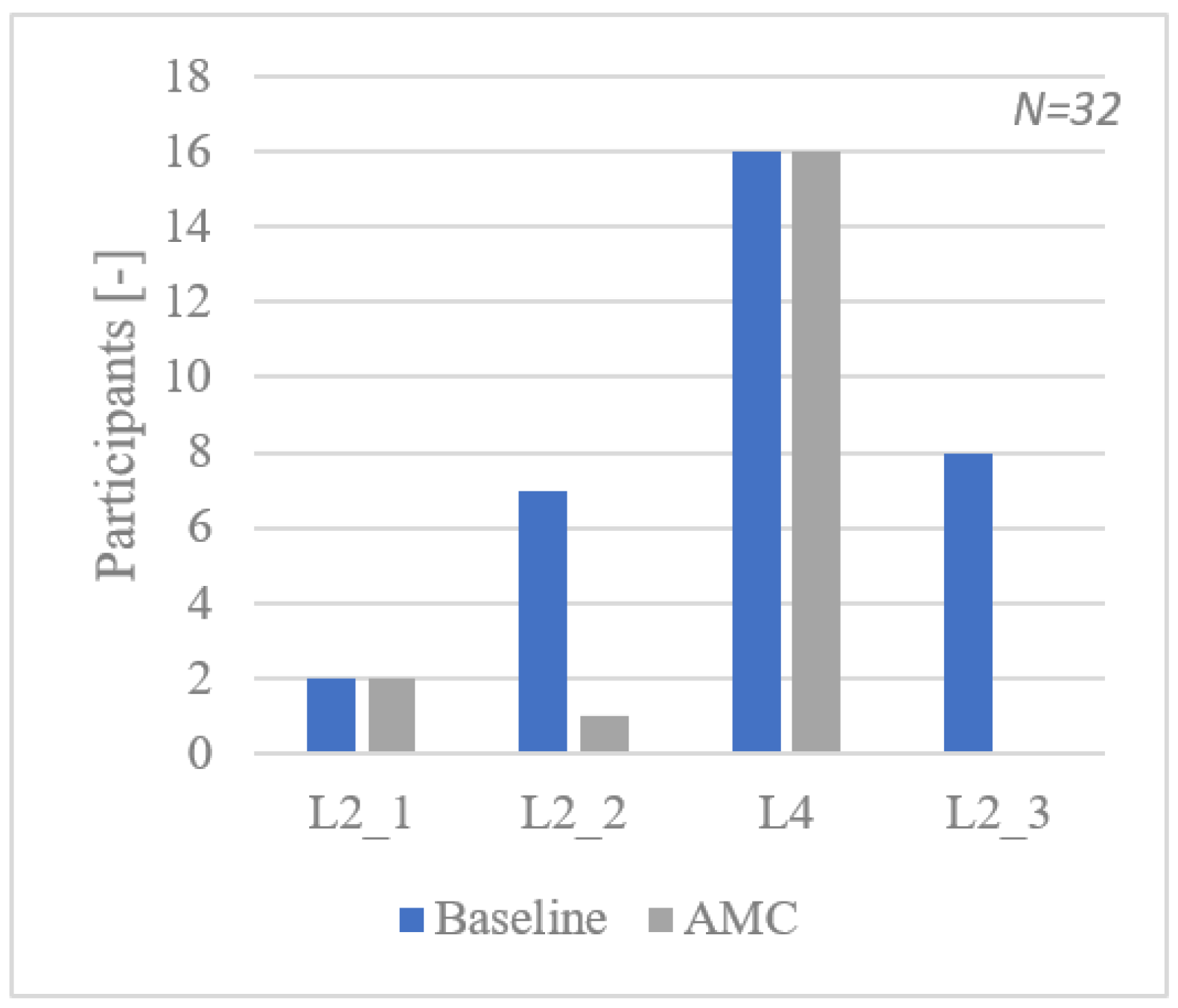
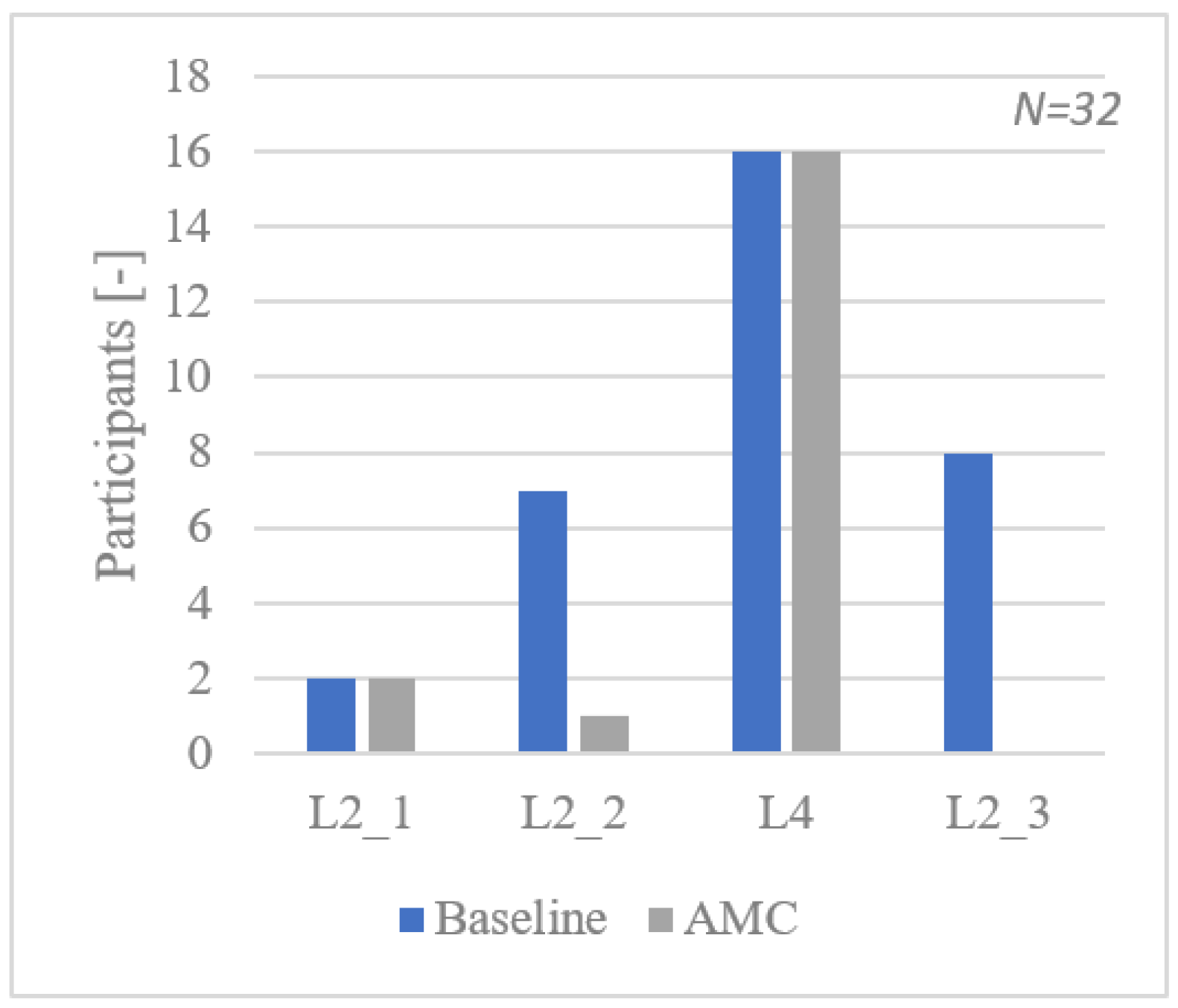
3.2. NDRA Engagement
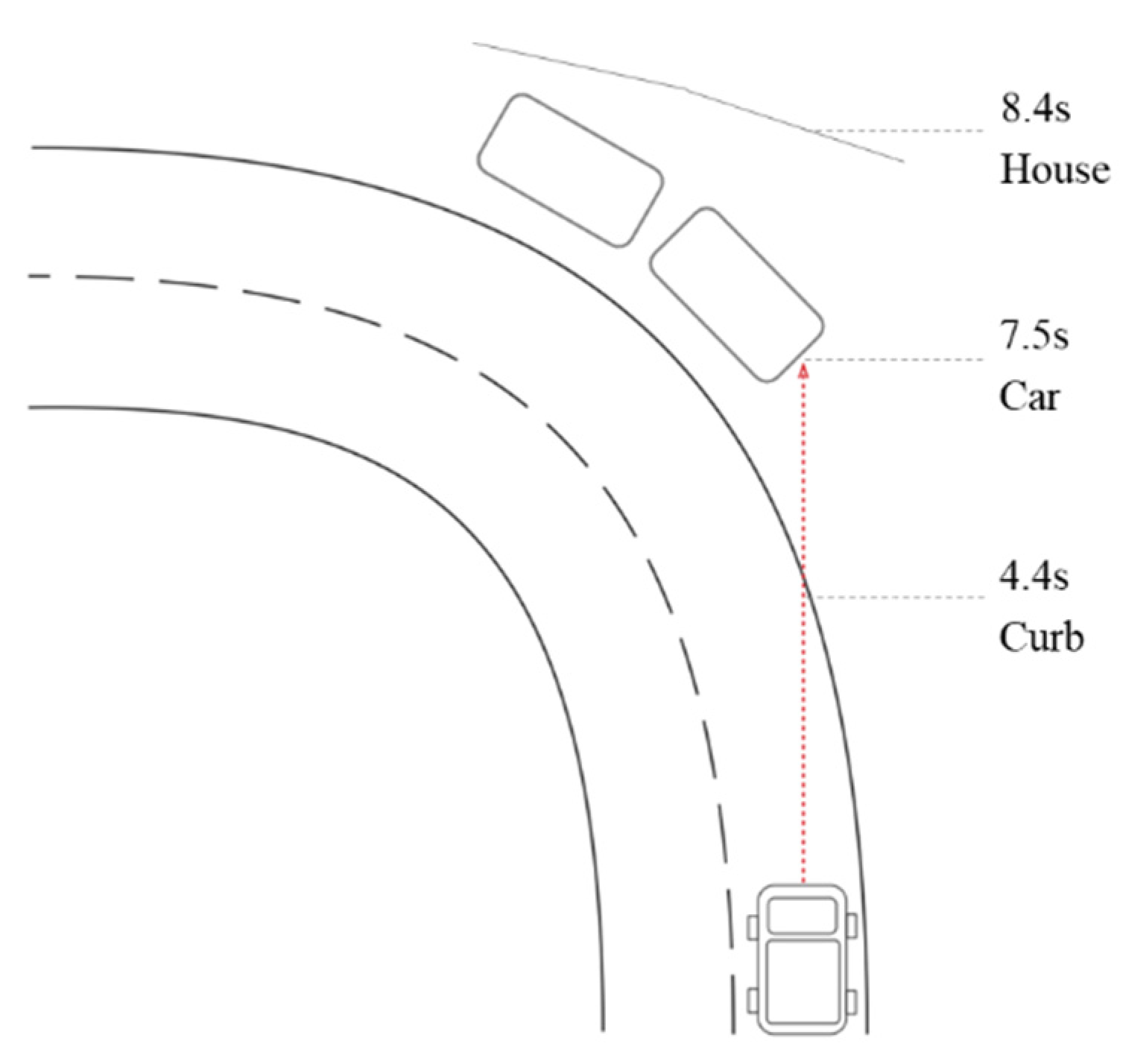
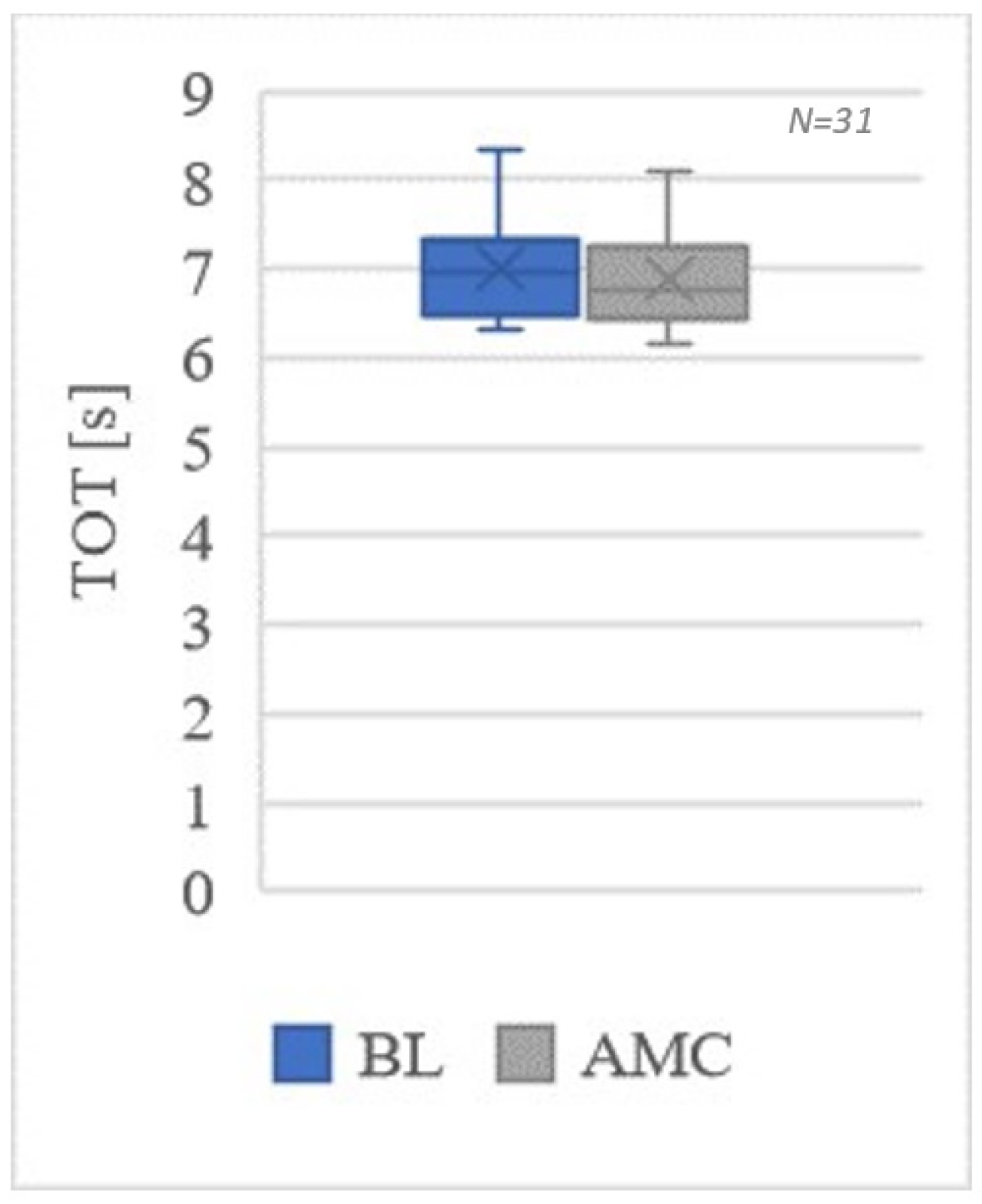
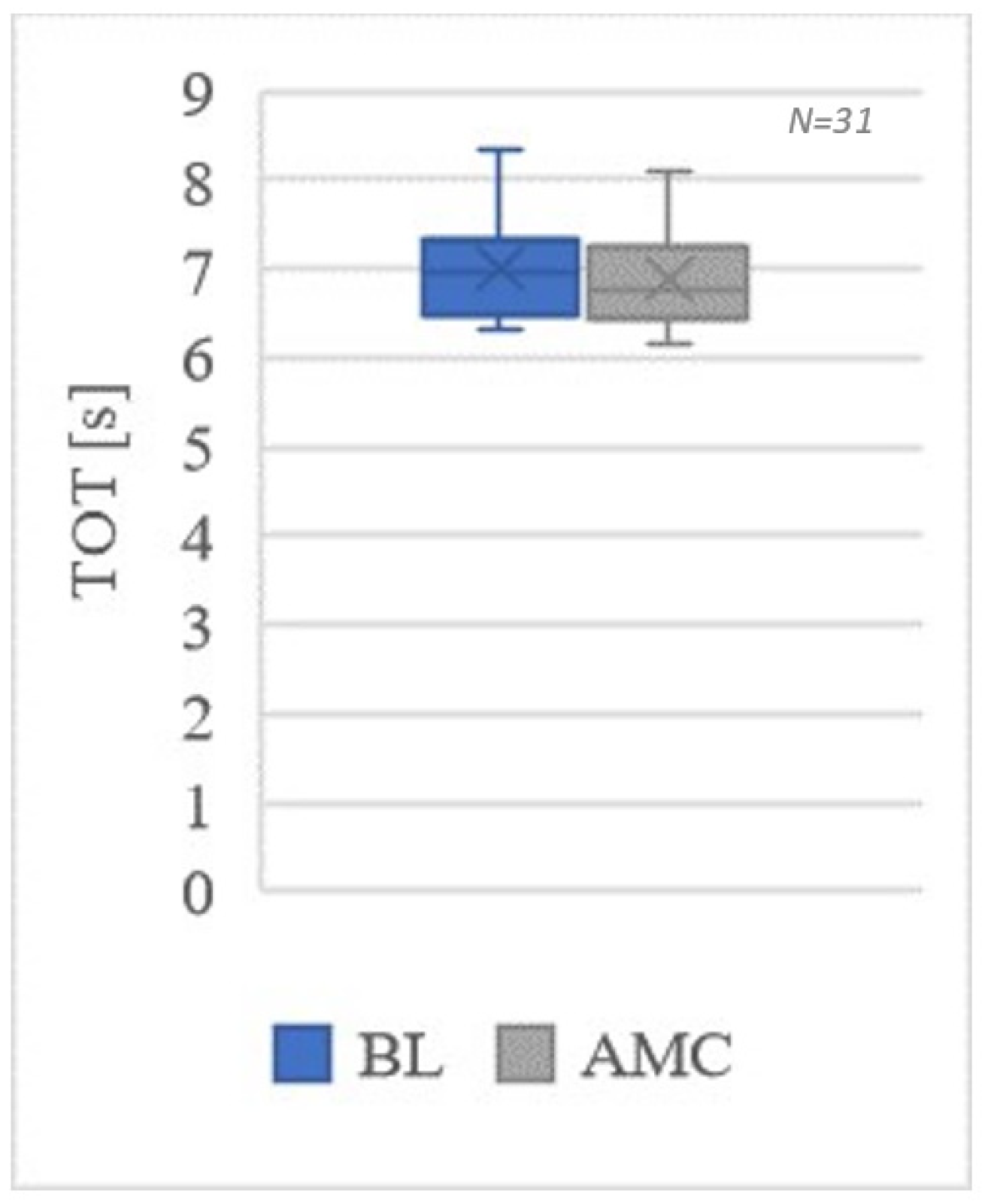
3.3. System Malfunction Scenario
3.4. Subjective Data
- I have to monitor the system continuously while driving with City Assistant. (correct answers: 30)
- When City Assistant is activated, the system is responsible for ensuring driving safety. (correct answers: 28)
- I may perform non-driving related activities while driving with City Assistant. (correct answers: 30)
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- SAE International. J3016: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. 2021. Available online: https://www.sae.org/standards/content/j3016_202104 (accessed on 27 June 2022).
- Bailey, N.R.; Scerbo, M.W. Automation-induced complacency for monitoring highly reliable systems: The role of task complexity, system experience, and operator trust. Theor. Issues Ergon. Sci. 2007, 8, 321–348. [Google Scholar] [CrossRef]
- Banks, V.A.; Plant, K.L.; Stanton, N.A. Driver error or designer error: Using the Perceptual Cycle Model to explore the circumstances surrounding the fatal Tesla crash on 7th May 2016. Saf. Sci. 2018, 108, 278–285. [Google Scholar] [CrossRef]
- Yang, S.; Kuo, J.; Lenné, M.G. Patterns of Sequential Off-Road Glances Indicate Levels of Distraction in Automated Driving. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2019, 63, 2056–2060. [Google Scholar] [CrossRef]
- Russell, S.M.; Blanco, M.; Atwood, J.; Schaudt, W.A.; Fitchett, V.; Tidwell, S. Naturalistic Study of Level 2 Driving Automation Functions. 2018. Available online: https://rosap.ntl.bts.gov/view/dot/41939 (accessed on 27 June 2022).
- Llaneras, R.E.; Salinger, J.; Green, C.A. Human Factors Issues Associated with Limited Ability Autonomous Driving Systems: Drivers’ Allocation of Visual Attention to the Forward Roadway. In Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design, Bolton Landing, NY, USA, 17–20 June 2013; University of Iowa: Iowa City, IA, USA, 2013; pp. 92–98. [Google Scholar]
- Reagan, I.J.; Teoh, E.R.; Cicchino, J.B.; Gershon, P.; Reimer, B.; Mehler, B.; Seppelt, B. Disengagement from driving when using automation during a 4-week field trial. Transp. Res. Part F Traff. Psychol. Behav. 2021, 82, 400–411. [Google Scholar] [CrossRef]
- Monk, A. Mode errors: A user-centred analysis and some preventative measures using keying-contingent sound. Int. J. Man-Mach. Stud. 1986, 24, 313–327. [Google Scholar] [CrossRef]
- Feldhütter, A.; Härtwig, N.; Kurpiers, C.; Hernandez, J.M.; Bengler, K. Effect on Mode Awareness When Changing from Conditionally to Partially Automated Driving. In Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018), Florence, Italy, 26–28 August 2018; Bagnara, S., Tartaglia, R., Albolino, S., Alexander, T., Fujita, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 314–324, ISBN 978-3-319-96074-6. [Google Scholar]
- Boos, A.; Feldhütter, A.; Schwiebacher, J.; Bengler, K. Mode Errors and Intentional Violations in Visual Monitoring of Level 2. In IEEE ITSC 2020 Virtual Conference, Proceedings of the 23rd IEEE International Conference on Intelligent Transportation Systems, Virtual Conference, 20–23 September 2020; IEEE: Piscataway Township, NJ, USA, 2020. [Google Scholar]
- Klauer, S.G.; Dingus, T.A.; Neale, V.L.; Sudweeks, J.D.; Ramsey, D.J. The Impact of Driver Inattention on Near-Crash/Crash Risk: An Analysis Using the 100-Car Naturalistic Driving Study Data; Virginia Polytechnic Institute and State University: Blacksburg, VA, USA, 2006. [Google Scholar]
- Louw, T.; Kuo, J.; Romano, R.; Radhakrishnan, V.; Lenné, M.G.; Merat, N. Engaging in NDRTs affects drivers’ responses and glance patterns after silent automation failures. Transp. Res. Part F Traff. Psychol. Behav. 2019, 62, 870–882. [Google Scholar] [CrossRef]
- Naujoks, F.; Purucker, C.; Neukum, A. Secondary task engagement and vehicle automation—Comparing the effects of different automation levels in an on-road experiment. Transp. Res. Part F Traff. Psychol. Behav. 2016, 38, 67–82. [Google Scholar] [CrossRef]
- Victor, T.W.; Tivesten, E.; Gustavsson, P.; Johansson, J.; Sangberg, F.; Ljung Aust, M. Automation Expectation Mismatch: Incorrect Prediction Despite Eyes on Threat and Hands on Wheel. Hum. Factors 2018, 60, 1095–1116. [Google Scholar] [CrossRef]
- Mole, C.; Pekkanen, J.; Sheppard, W.; Louw, T.; Romano, R.; Merat, N.; Markkula, G.; Wilkie, R. Predicting takeover response to silent automated vehicle failures. PLoS ONE 2020, 15, e0242825. [Google Scholar] [CrossRef]
- Hollander, C.; Rauh, N.; Naujoks, F.; Hergeth, S.; Krems, J.F.; Keinath, A. Methodological Approach towards Evaluating the Effects of Non-Driving Related Tasks during Partially Automated Driving. Information 2020, 11, 340. [Google Scholar] [CrossRef]
- Stanton, N.A.; Salmon, P.M. Actor Map and AcciMap: Analysis of the Uber Collision with a Pedestrian in Arizona, USA. Contemp. Ergon. Hum. Factors. 2020. Available online: https://publications.ergonomics.org.uk/uploads/Actor-Map-and-AcciMap-Analysis-of-the-Uber-collision-with-a-pedestrian-in-Arizona-USA.pdf (accessed on 27 June 2022).
- Meyer-Waarden, L.; Cloarec, J. “Baby, you can drive my car”: Psychological antecedents that drive consumers’ adoption of AI-powered autonomous vehicles. Technovation 2022, 109, 102348. [Google Scholar] [CrossRef]
- Tice, D.M.; Baumeister, R.F.; Shmueli, D.; Muraven, M. Restoring the self: Positive affect helps improve self-regulation following ego depletion. J. Exp. Soc. Psychol. 2007, 43, 379–384. [Google Scholar] [CrossRef]
- Braun, M.; Weber, F.; Alt, F. Affective Automotive User Interfaces—Reviewing the State of Emotion Regulation in the Car. 2020. Available online: https://arxiv.org/pdf/2003.13731 (accessed on 27 June 2022).
- Rattenbury, S. Smiley Faces Encourage Drivers to Slow Down. Available online: https://www.cmtedd.act.gov.au/open_government/inform/act_government_media_releases/rattenbury/2020/smiley-faces-encourage-drivers-to-slow-down (accessed on 20 April 2022).
- NIO. NOMI—World’s First in-Vehicle Artificial Intelligence. Available online: https://www.nio.com/blog/nomi-worlds-first-vehicle-artificial-intelligence (accessed on 20 April 2022).
- Williams, K.; Flores, J.A.; Peters, J. Affective Robot Influence on Driver Adherence to Safety, Cognitive Load Reduction and Sociability. In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–19 September 2014; Boyle, L.N., Fröhlich, P., Iqbal, S., Burnett, G., Miller, E., Wu, Y., Eds.; ACM: New York, NY, USA, 2014; pp. 1–8, ISBN 9781450332125. [Google Scholar]
- Lewis, I.; Watson, B.; White, K.M. An examination of message-relevant affect in road safety messages: Should road safety advertisements aim to make us feel good or bad? Transp. Res. Part F Traff. Psychol. Behav. 2008, 11, 403–417. [Google Scholar] [CrossRef]
- Maddux, J.E.; Rogers, R.W. Protection motivation and self-efficacy: A revised theory of fear appeals and attitude change. J. Exp. Soc. Psychol. 1983, 19, 469–479. [Google Scholar] [CrossRef]
- Glendon, A.I.; Walker, B.L. Can anti-speeding messages based on protection motivation theory influence reported speeding intentions? Accid. Anal. Prev. 2013, 57, 67–79. [Google Scholar] [CrossRef]
- Chaurand, N.; Bossart, F.; Delhomme, P. A naturalistic study of the impact of message framing on highway speeding. Transp. Res. Part F Traff. Psychol. Behav. 2015, 35, 37–44. [Google Scholar] [CrossRef]
- Feierle, A.; Bücherl, F.; Hecht, T.; Bengler, K. Evaluation of Display Concepts for the Instrument Cluster in Urban Automated Driving. In Proceedings of the 2nd International Conference on Human Systems Engineering and Design II (IHSED 2019): Future Trends and Applications, Munich, Germany, 16–18 September 2019; Ahram, T., Karwowski, W., Pickl, S., Taiar, R., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 209–215, ISBN 978-3-030-27928-8. [Google Scholar]
- Bengler, K.; Rettenmaier, M.; Fritz, N.; Feierle, A. From HMI to HMIs: Towards an HMI Framework for Automated Driving. Information 2020, 11, 61. [Google Scholar] [CrossRef]
- Davison, W.P. The Third-Person Effect in Communication. Public Opin. Q. 1983, 47, 1–15. [Google Scholar] [CrossRef]
- Feldhütter, A.; Hecht, T.; Kalb, L.; Bengler, K. Effect of prolonged periods of conditionally automated driving on the development of fatigue: With and without non-driving-related activities. Cogn. Technol. Work. 2018, 21, 33–40. [Google Scholar] [CrossRef]
- EN ISO. 15007: Road Vehicles—Measurement of Driver Visual Behaviour with Respect to Transport Information And Control Systems: Part 1: Definitions and Parameters; Beuth Verlag GmbH: Berlin, Germany, 2015. [Google Scholar]
- Naujoks, F.; Forster, Y.; Wiedemann, K.; Neukum, A. Improving Usefulness of Automated Driving by Lowering Primary Task Interference through HMI Design. J. Adv. Transp. 2017, 2017, 6105087. [Google Scholar] [CrossRef]
- Feierle, A.; Schlichtherle, F.; Bengler, K. Augmented Reality Head-Up Display: A Visual Support During Malfunctions in Partially Automated Driving? IEEE Trans. Intell. Transport. Syst. 2021, 23, 4853–4865. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research. In Human Mental Workload; Meshkati, N., Hancock, P.A., Eds.; Elsevier: Amsterdam, The Netherlands, 1988; pp. 139–183. ISBN 9780444703880. [Google Scholar]
- Hassenzahl, M.; Burmester, M.; Koller, F. AttrakDiff: Ein Fragebogen zur Messung wahrgenommener hedonischer und pragmatischer Qualität. In Mensch & Computer 2003: Berichte des German Chapter of the ACM; Szwillus, G., Ziegler, J., Eds.; Vieweg+Teubner: Berlin, Germany, 2003; pp. 187–196. ISBN 978-3-519-00441-7. [Google Scholar]
- Gold, C.; Naujoks, F.; Radlmayr, J.; Bellem, H.; Jarosch, O. Testing Scenarios for Human Factors Research in Level 3 Automated Vehicles. In Advances in Human Aspects of Transportation; Stanton, N.A., Ed.; Springer International Publishing: Cham, Switzerland, 2018; pp. 551–559. ISBN 978-3-319-60441-1. [Google Scholar]
- ERTRAC. Connected Automated Driving Roadmap; ERTRAC Working Group “Connectivity and Automated Driving” No. 8; ERTRAC: Brussels, Belgium, 2019. [Google Scholar]
- Blanca, M.J.; Alarcón, R.; Arnau, J.; Bono, R.; Bendayan, R. Non-normal data: Is ANOVA still a valid option? Psicothema 2017, 29, 552–557. [Google Scholar] [CrossRef]
- Stevens, J. Applied Multivariate Statistics for the Social Sciences, 3rd ed.; Erlbaum: Mahwah, NJ, USA, 1996; ISBN 0805816704. [Google Scholar]
- Carifio, J.; Perla, R. Resolving the 50-year debate around using and misusing Likert scales. Med. Educ. 2008, 42, 1150–1152. [Google Scholar] [CrossRef]
- Holm, S. A simple sequentially rejective multiple test procedure. Scand. J. Stat. 1979, 6, 65–70. [Google Scholar]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; Erlbaum: Hillsdale, NJ, USA, 1988; ISBN 9781134742707. [Google Scholar]
- Othersen, I. Vom Fahrer zum Denker und Teilzeitlenker: Einflussfaktoren und Gestaltungsmerkmale Nutzerorientierter Interaktionskonzepte für die Überwachungsaufgabe des Fahrers im Teilautomatisierten Modus; Technische Universität Braunschweig: Braunschweig, Germany, 2016. [Google Scholar]
- Thaler, R.H.; Sunstein, C.R. Nudge: Improving Decisions about Health, Wealth and Happiness, Revised ed.; New International Edition; Penguin Books: London, UK, 2009; ISBN 0141040017. [Google Scholar]
- Toet, A.; van Erp, J.B. The EmojiGrid as a Tool to Assess Experienced and Perceived Emotions. Psych 2019, 1, 469–481. [Google Scholar] [CrossRef]
- Mrazek, M.; Phillips, D.; Franklin, M.; Broadway, J.; Schooler, J. Young and restless: Validation of the Mind-Wandering Questionnaire (MWQ) reveals disruptive impact of mind-wandering for youth. Front. Psychol. 2013, 4, 560. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dependent Variable | Description |
|---|---|
| Driving Data | |
| Take-Over Time [s] | Time between start of malfunction and deactivation of ADS |
| Crash Rate [-] | Proportion of crashes during the malfunction |
| Eye-Tracking/Video Data | |
| Attention Ratio Road Ahead [%] | Central TV screen, including HUD but without IC |
| Attentiveness [1,2,3,4,5] | Coding scheme (see Table 2) |
| NDRA Engagement Ratio [%] | Share of participants with NDRA |
| Subjective Data | |
| Workload [-] | NASA raw TLX questionnaire |
| User Experience [-] | AttrakDiff questionnaire |
| Mode Awareness [-] | Retrospective interview |
| Scenario Characteristics [-] | Four single items on a 5-point Likert scale |
| Code | Title 3 |
|---|---|
| 1 | Not distracted, driver does not perform an NDRA |
| 2 | Alternating NDRA and system monitoring |
| 3 | Short glances ahead, continuation of NDRA |
| 4 | No reaction, continuation of NDRA |
| 5 | Interruption of NDRA until situation is completed |
| Reason | Advanced | Baseline | Total |
|---|---|---|---|
| Over-reliance | 1 | 8 | 9 |
| Boredom | - | 3 | 3 |
| Fatigue | - | 2 | 2 |
| Mode Confusion | - | 1 | 1 |
| Curiosity | 1 | - | 1 |
| Measure | Baseline M (SD) | AMC M (SD) | Statistics | p-Value | αHolm |
|---|---|---|---|---|---|
| PQ: Pragmatic Quality | 1.21 (0.75) | 1.43 (0.68) | t(30) = 0.842 | p = 0.407 | αHolm = 0.050 |
| HQ-I: Hedonic Quality—identity | 0.86 (0.68) | 1.26 (0.54) | Z = −2.282 | p = 0.022 | αHolm = 0.013 |
| HQ-S: Hedonic Quality—stimulation | 0.33 (0.80) | 0.85 (0.57) | t(30) = 2.108 | p = 0.044 | αHolm = 0.017 |
| ATT: Attractiveness | 1.36 (0.72) | 1.73 (0.55) | Z = −1.967 | p = 0.049 | αHolm = 0.025 |
| Measure | Baseline Median | AMC Median | Statistics | p-Value | αHolm |
|---|---|---|---|---|---|
| Time Budget | 2.0 | 1.5 | Z = −0.529 | p = 0.597 | αHolm = 0.013 |
| Criticality | 2.0 | 2.0 | Z = −0.377 | p = 0.706 | αHolm = 0.025 |
| Complexity | 3.5 | 3.0 | Z = −0.332 | p = 0.740 | αHolm = 0.050 |
| Predictability | 1.0 | 1.5 | Z = −0.420 | p = 0.674 | αHolm = 0.017 |
| Statement | Median | Mean (SD) |
|---|---|---|
| I have adapted my system monitoring behavior when driving with the City Assistant because of the pop-up messages with emoticons. | 4 | 3.75 (0.93) |
| I think the messages are effective to help me to concentrate on system monitoring when driving with City Assistant. | 4 | 3.69 (1.30) |
| I think the messages are helpful for me to disengage from non-driving-related tasks when driving with City Assistant. | 4 | 3.69 (1.08) |
| I felt less bored when I saw the pop-up messages when driving with City Assistant. | 4 | 3.31 (1.30) |
| I felt less bored when I saw the emoticons when driving with City Assistant. | 4 | 3.44 (1.03) |
| I was distracted because of the messages when driving with City Assistant. | 2 | 2.56 (1.03) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hecht, T.; Zhou, W.; Bengler, K. How to Keep Drivers Attentive during Level 2 Automation? Development and Evaluation of an HMI Concept Using Affective Elements and Message Framing. Safety 2022, 8, 47. https://doi.org/10.3390/safety8030047
Hecht T, Zhou W, Bengler K. How to Keep Drivers Attentive during Level 2 Automation? Development and Evaluation of an HMI Concept Using Affective Elements and Message Framing. Safety. 2022; 8(3):47. https://doi.org/10.3390/safety8030047
Chicago/Turabian StyleHecht, Tobias, Weisi Zhou, and Klaus Bengler. 2022. "How to Keep Drivers Attentive during Level 2 Automation? Development and Evaluation of an HMI Concept Using Affective Elements and Message Framing" Safety 8, no. 3: 47. https://doi.org/10.3390/safety8030047
APA StyleHecht, T., Zhou, W., & Bengler, K. (2022). How to Keep Drivers Attentive during Level 2 Automation? Development and Evaluation of an HMI Concept Using Affective Elements and Message Framing. Safety, 8(3), 47. https://doi.org/10.3390/safety8030047