
Functional Resonance Analysis in an Overtaking Situation in Road Traffic: Comparing the Performance Variability Mechanisms between Human and Automation


Abstract
:1. Introduction
2. Functional Resonance Analysis Method
3. Research Method
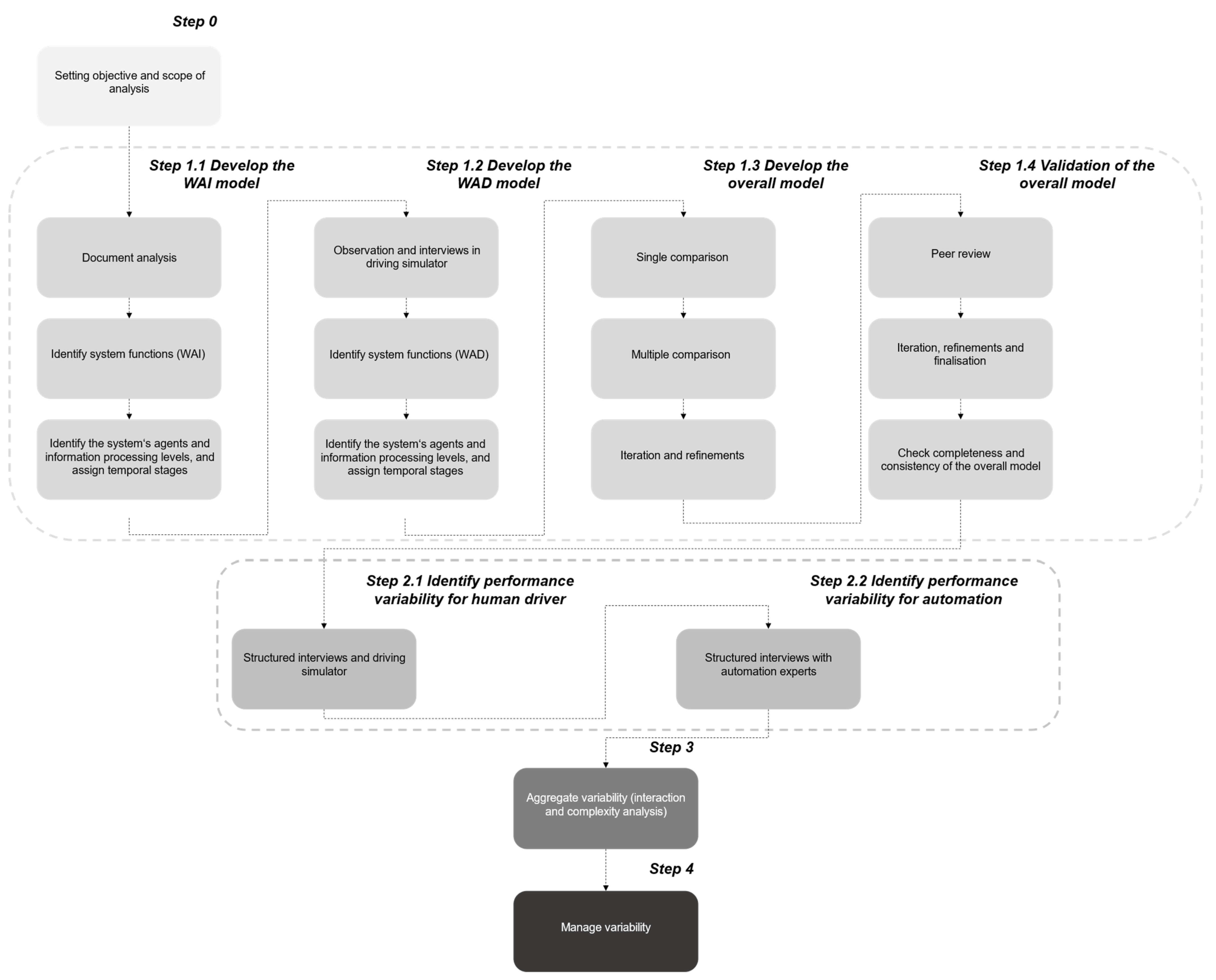
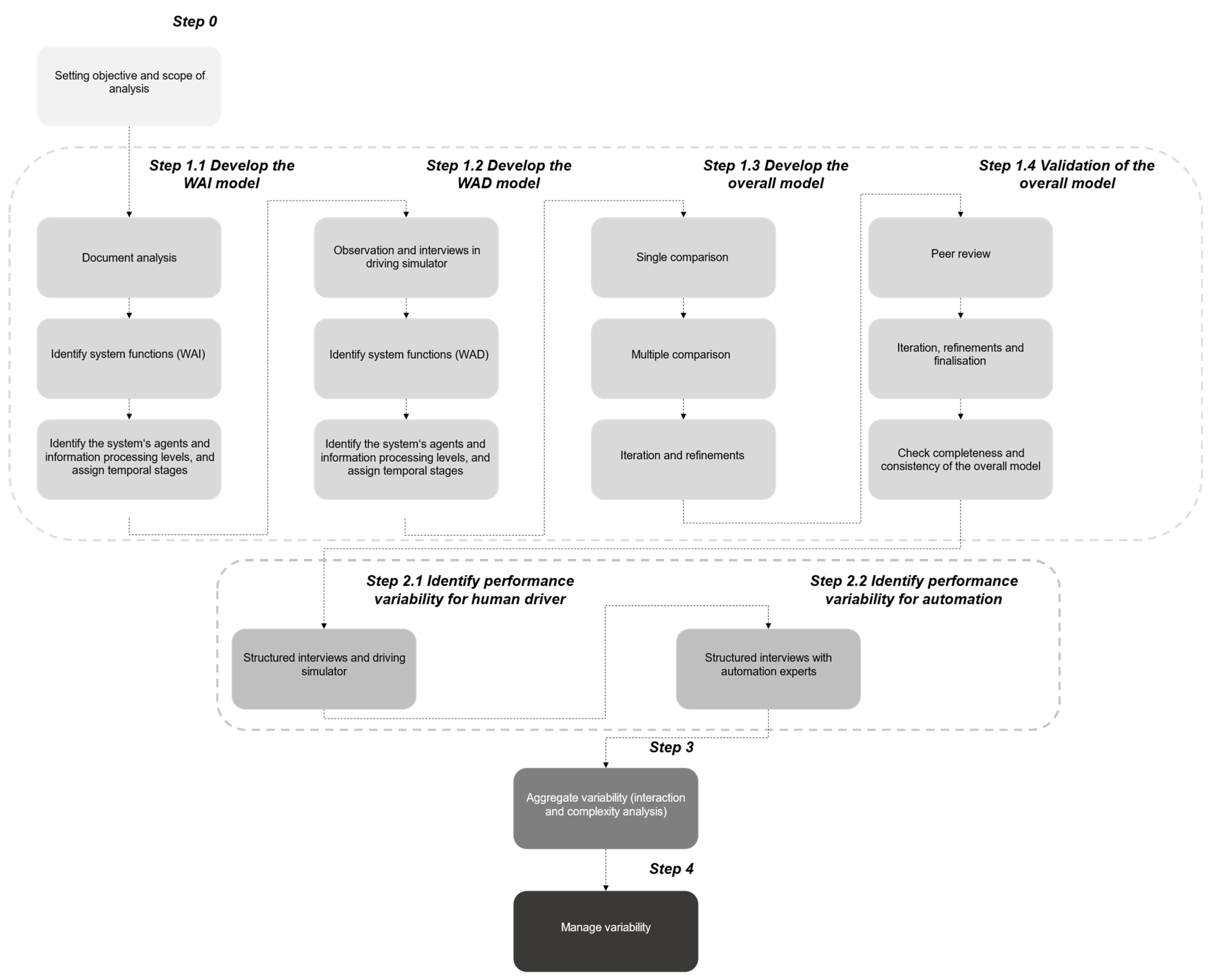
3.1. Overall Methodology
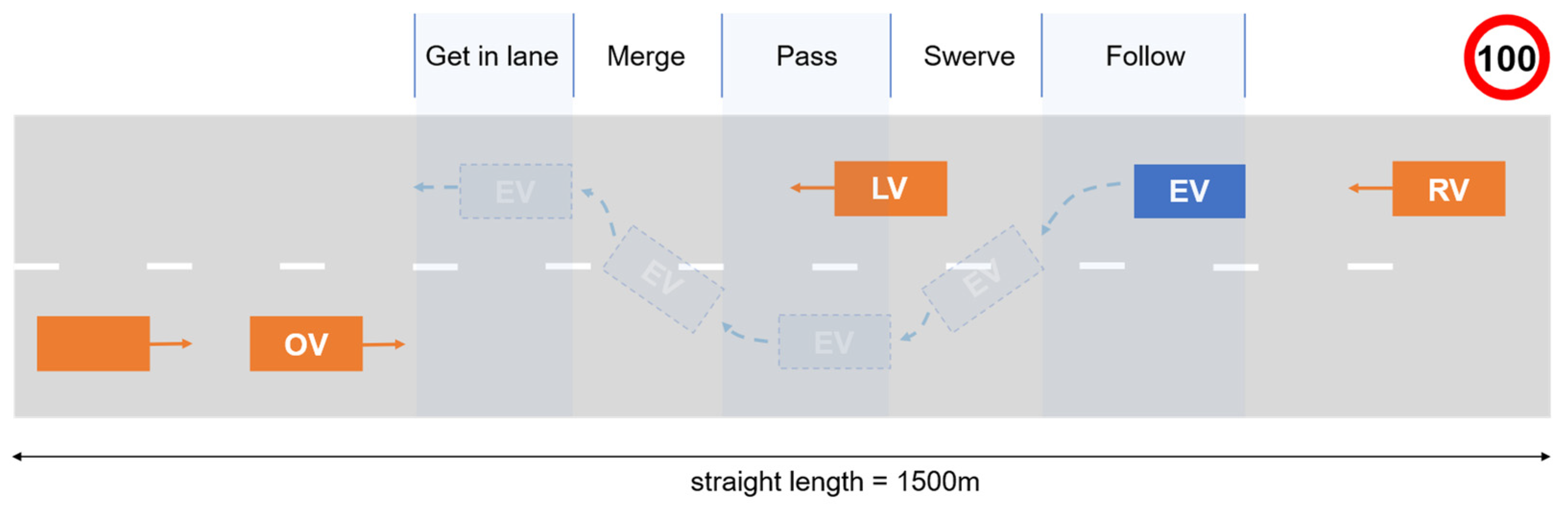
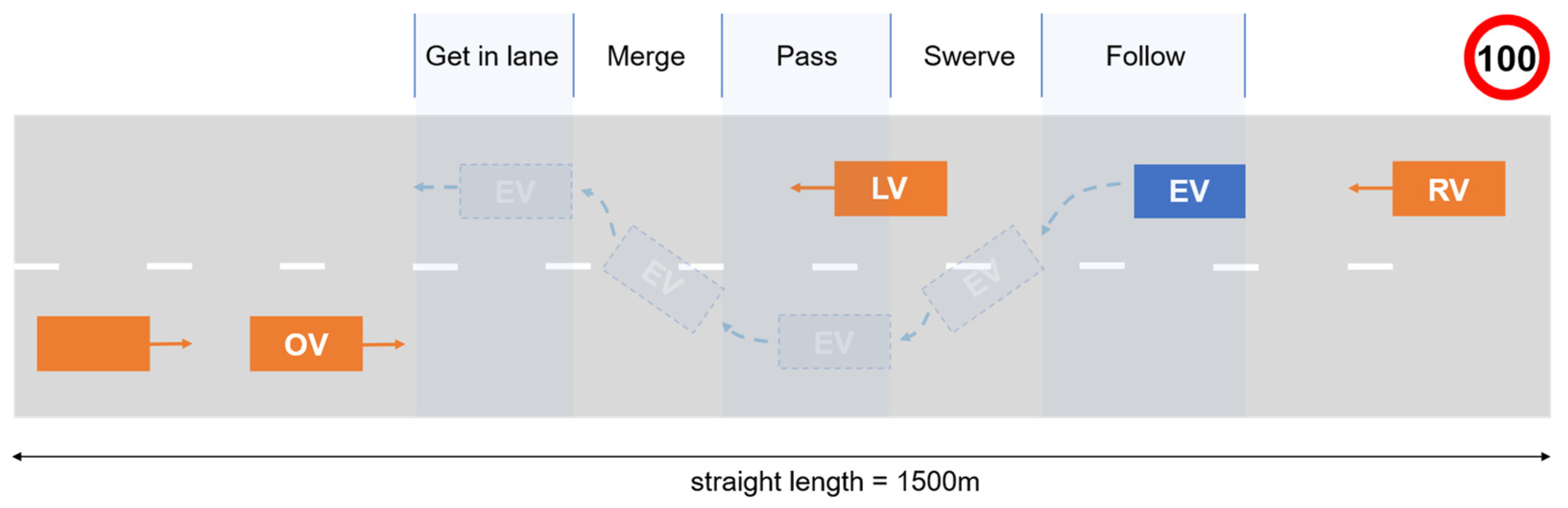
3.2. Step 0: Selection and Description of Scenario: Setting the Objective and Scope of Analysis
3.3. Step 1: Identification and Description of the System’s Functions
3.3.1. Develop the WAI Model
3.3.2. Develop the WAD Model
Driving Simulator
Sample
Procedure
Measures and Analysis
3.3.3. Develop the Overall Model
3.3.4. Validate the Overall Model
3.4. Step 2: Identification of Performance Variability
3.4.1. Identify Performance Variability for the Human Driver
Driving Simulator Study
Sample
Procedure
Measures and Analysis
Interviews and Survey
Sample
Structure of Questionnaire and Analysis
Procedure
3.4.2. Identify Performance Variability for Automation
Sample
Procedure and Analysis
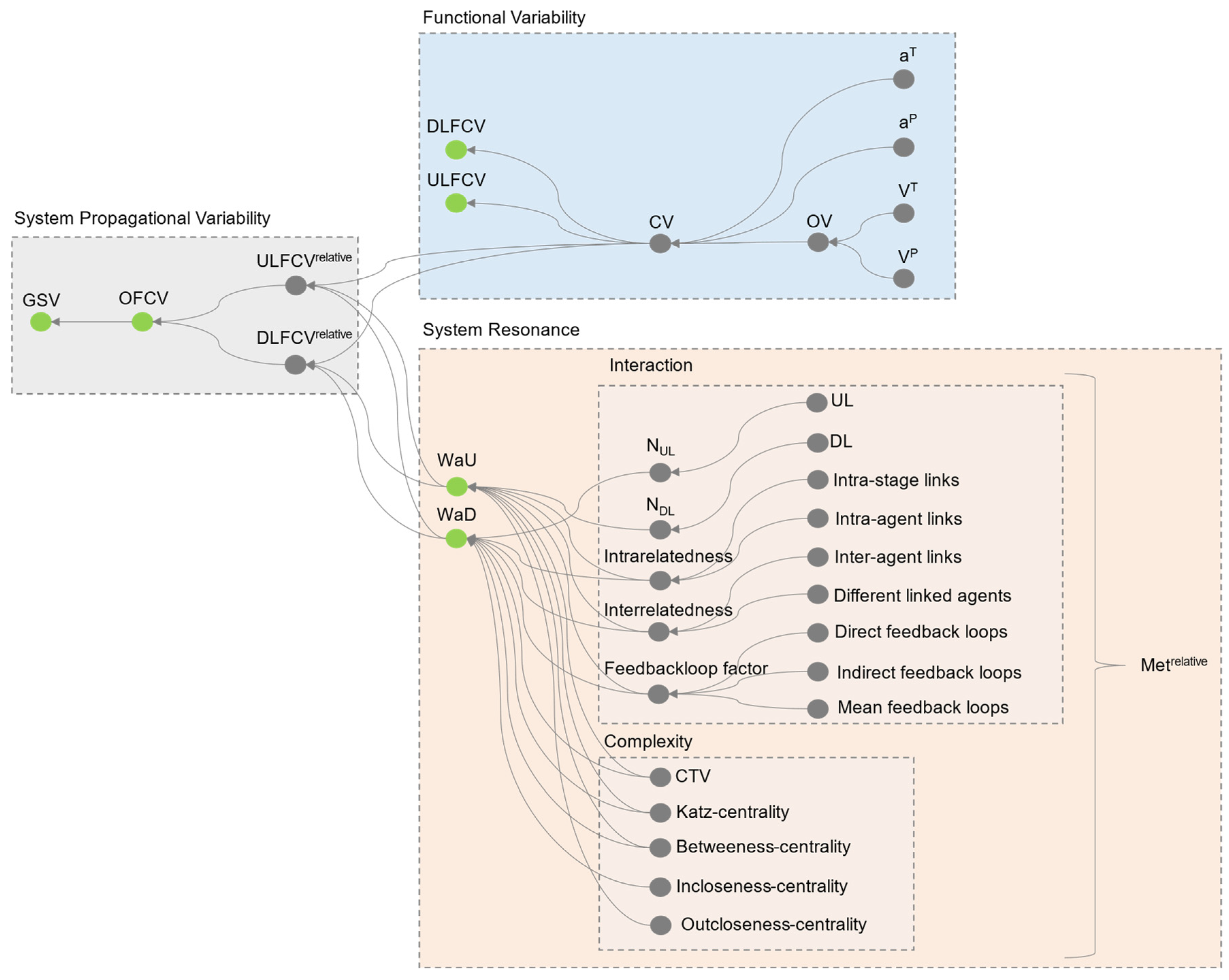
3.5. Step 3: Aggregation of Variability
3.5.1. Metrics for Functional Variability
3.5.2. Metrics for System Resonance
- Number of downlinks and uplinks ( and ) which show how many functions a function can directly influence and how many functions it is directly influenced by, respectively.
- Intrarelatedness expresses how many functions a function is linked to within an agent (e.g., EV) and within the same stage (e.g., Follow) or in different stages (e.g., Follow and Pass).
- Interrelatedness presents how many functions of other agents (e.g., LV and OV) a function is linked to and weights it with the number of different agents.
- Feedback loop factor reflects the extent to which a function’s output can influence its input through direct and indirect feedback loops.
- Katz-centrality depicts the relative degree of influence of a function within the system, showing the extent of indirect impact.
- Incloseness- and Outcloseness-centrality measure how central a function is located in a system and thus the more central a function is, the closer it is to all other functions and therefore has a high potential for functional resonance.
- Betweenness-centrality shows the degree of a function to bridge functions with other functions, which makes it a critical function for system success.
- Clustered Variability (CTV) shows how much upstream and downstream variability accumulates around a function to depict where groups of functions with high variabilities exist that are directly coupled.
3.5.3. Metrics for System Propagational Variability
3.6. Step 4: Management of Variability
4. Results
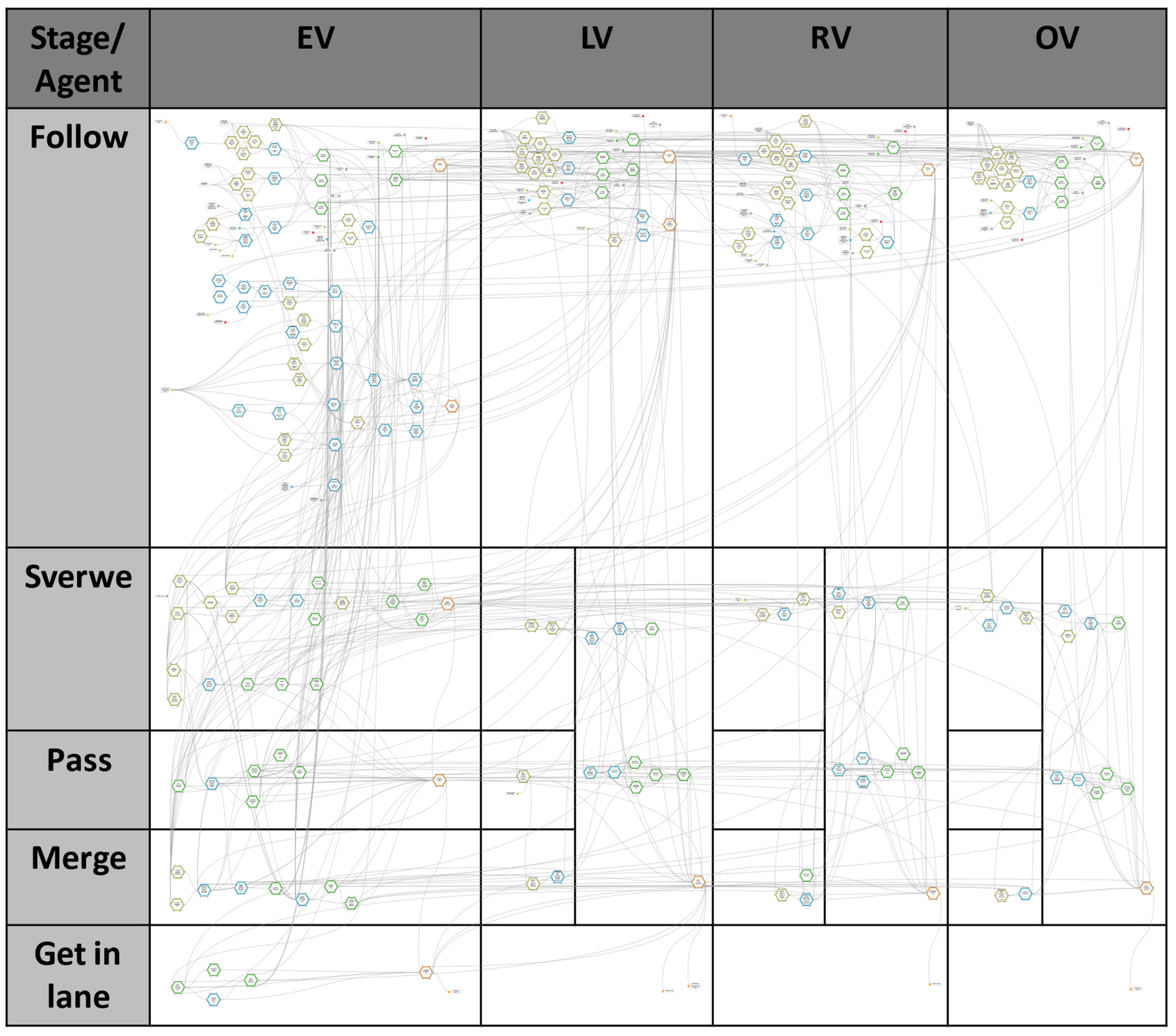
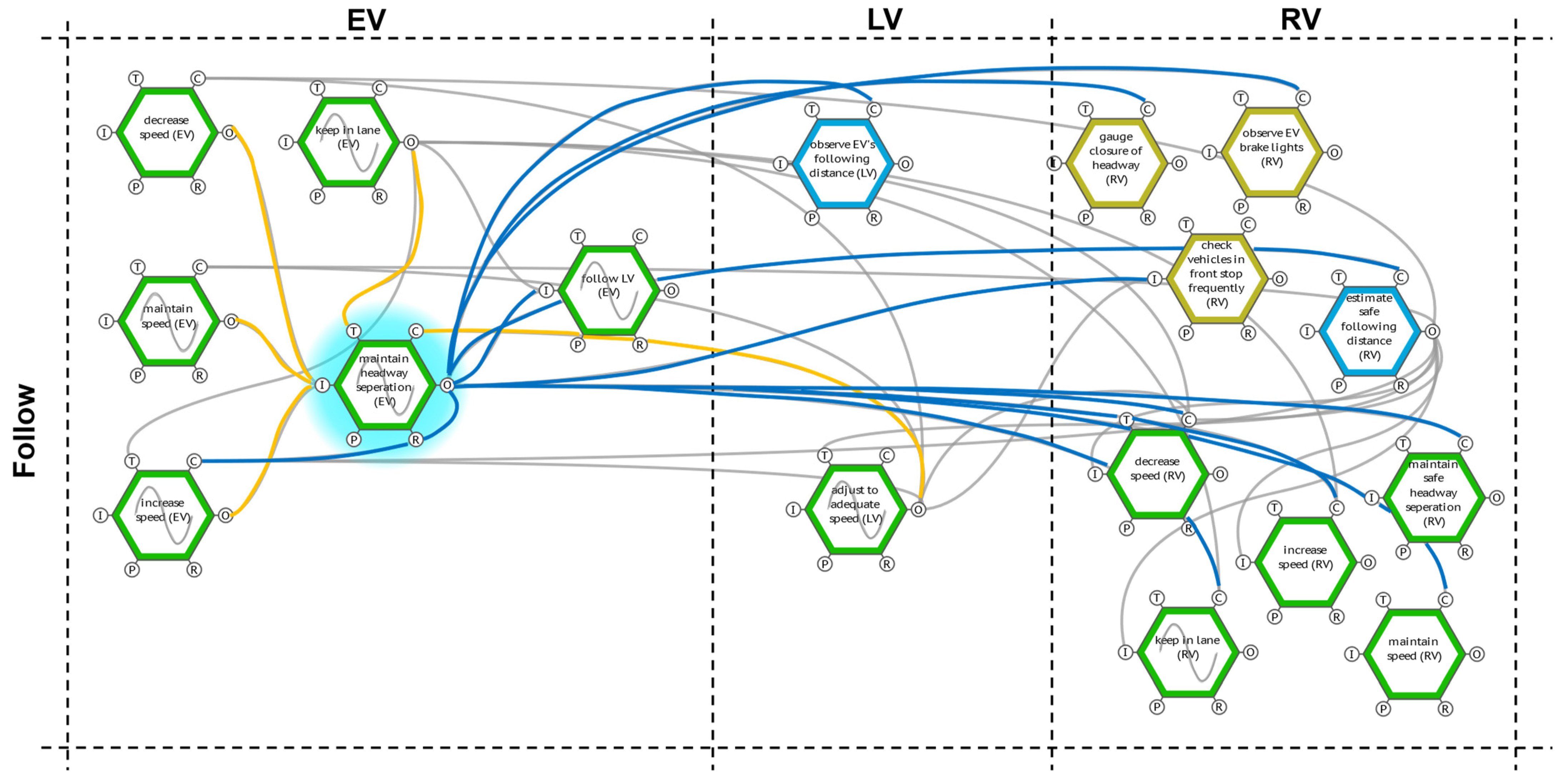
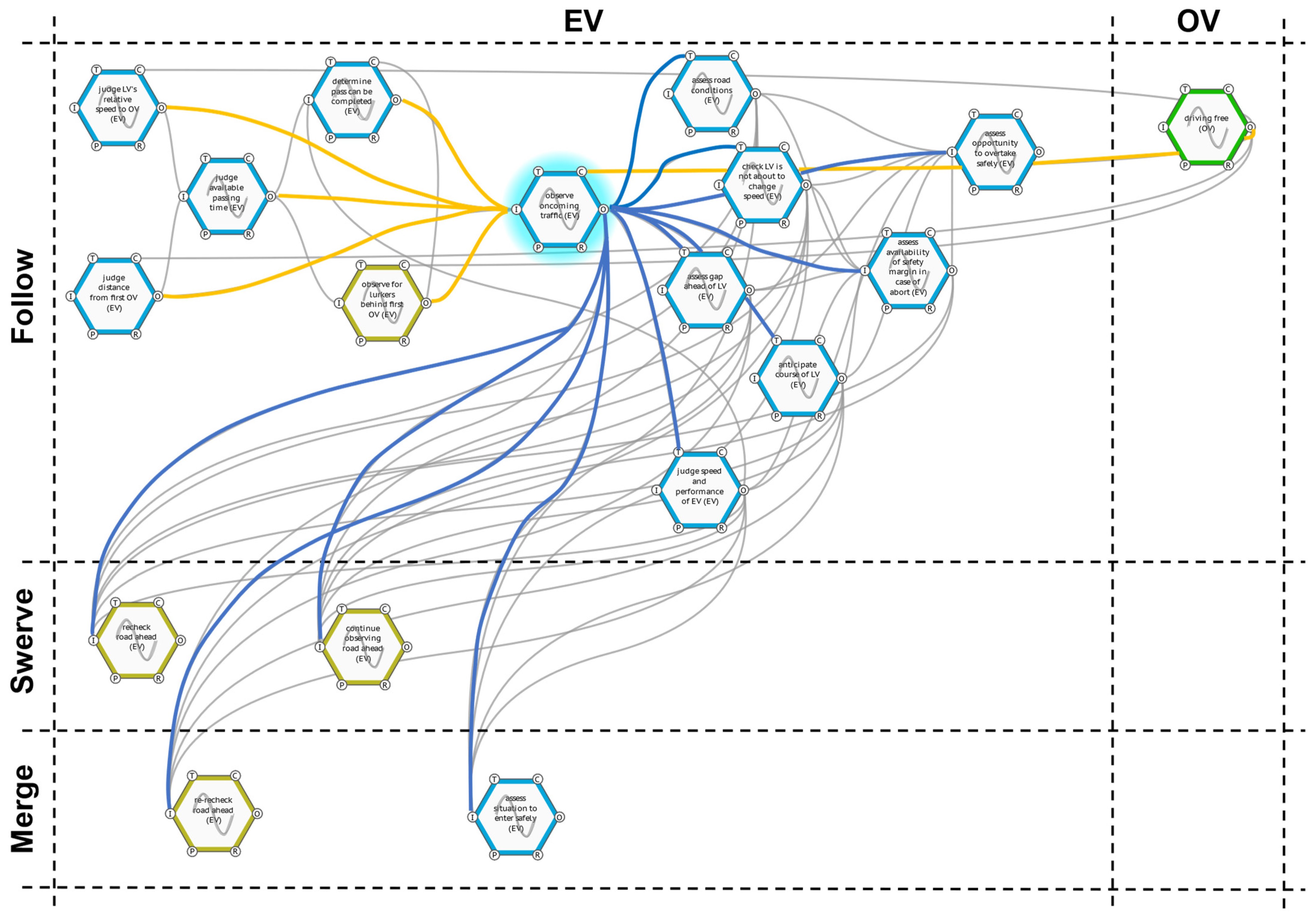
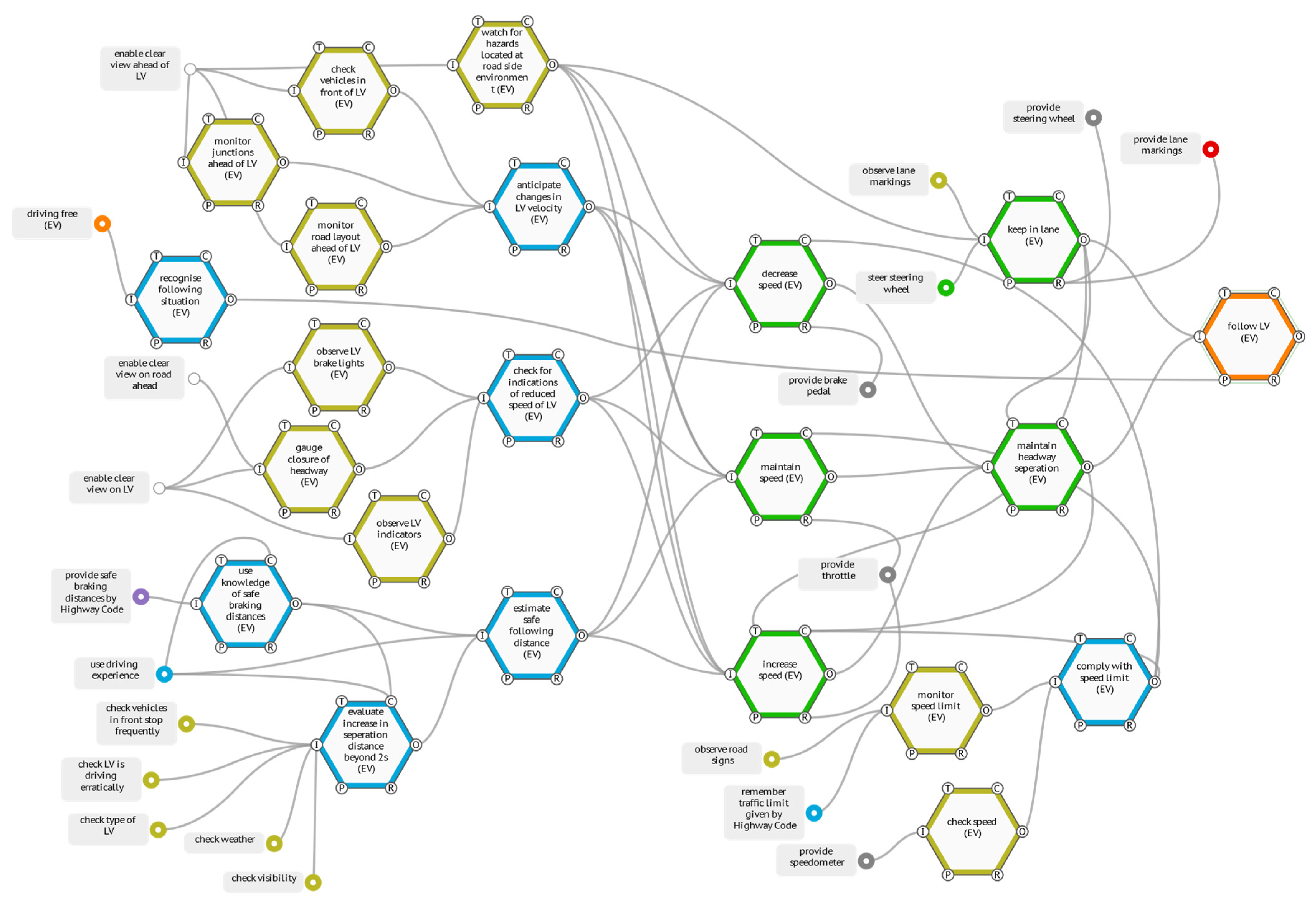
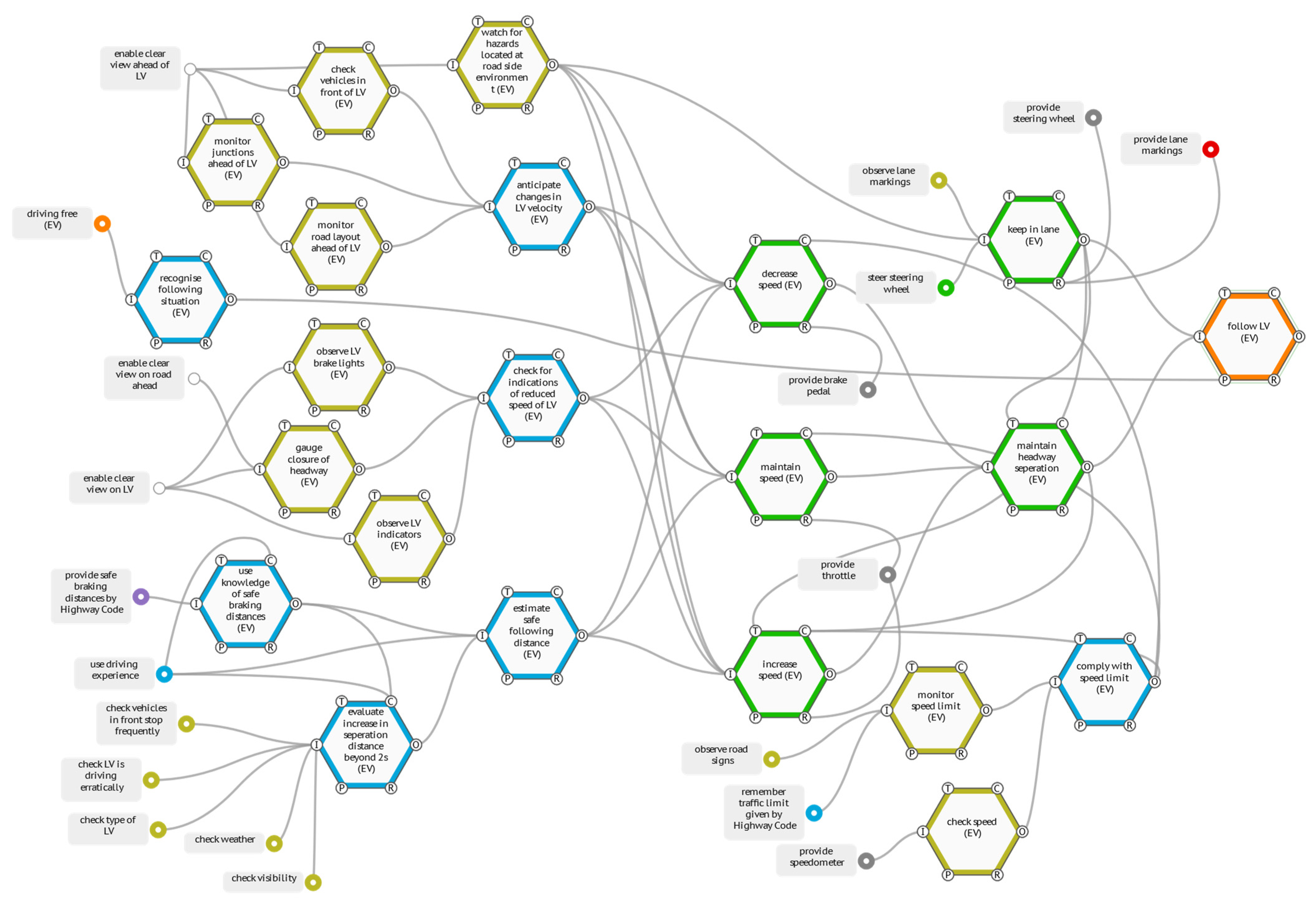
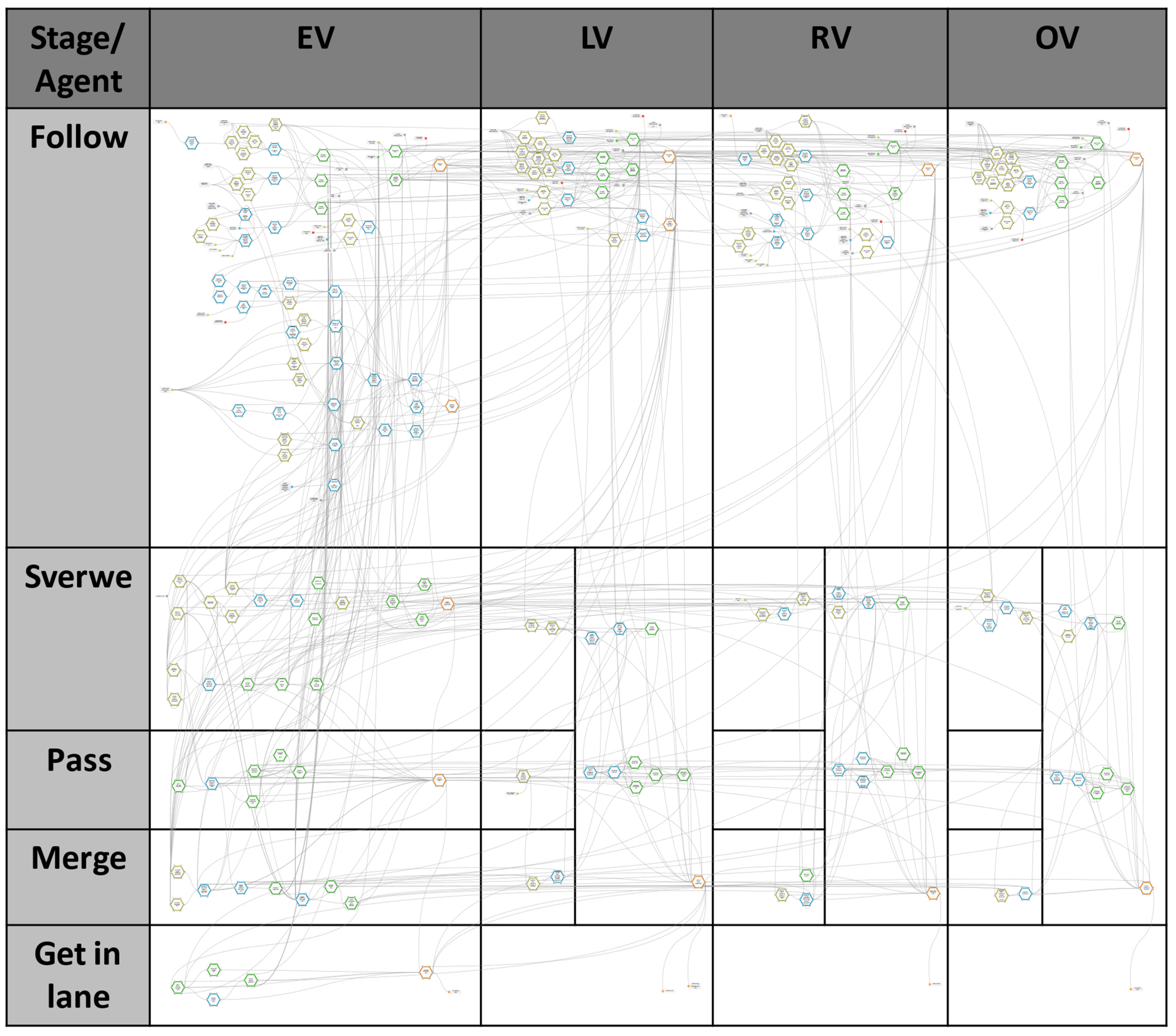
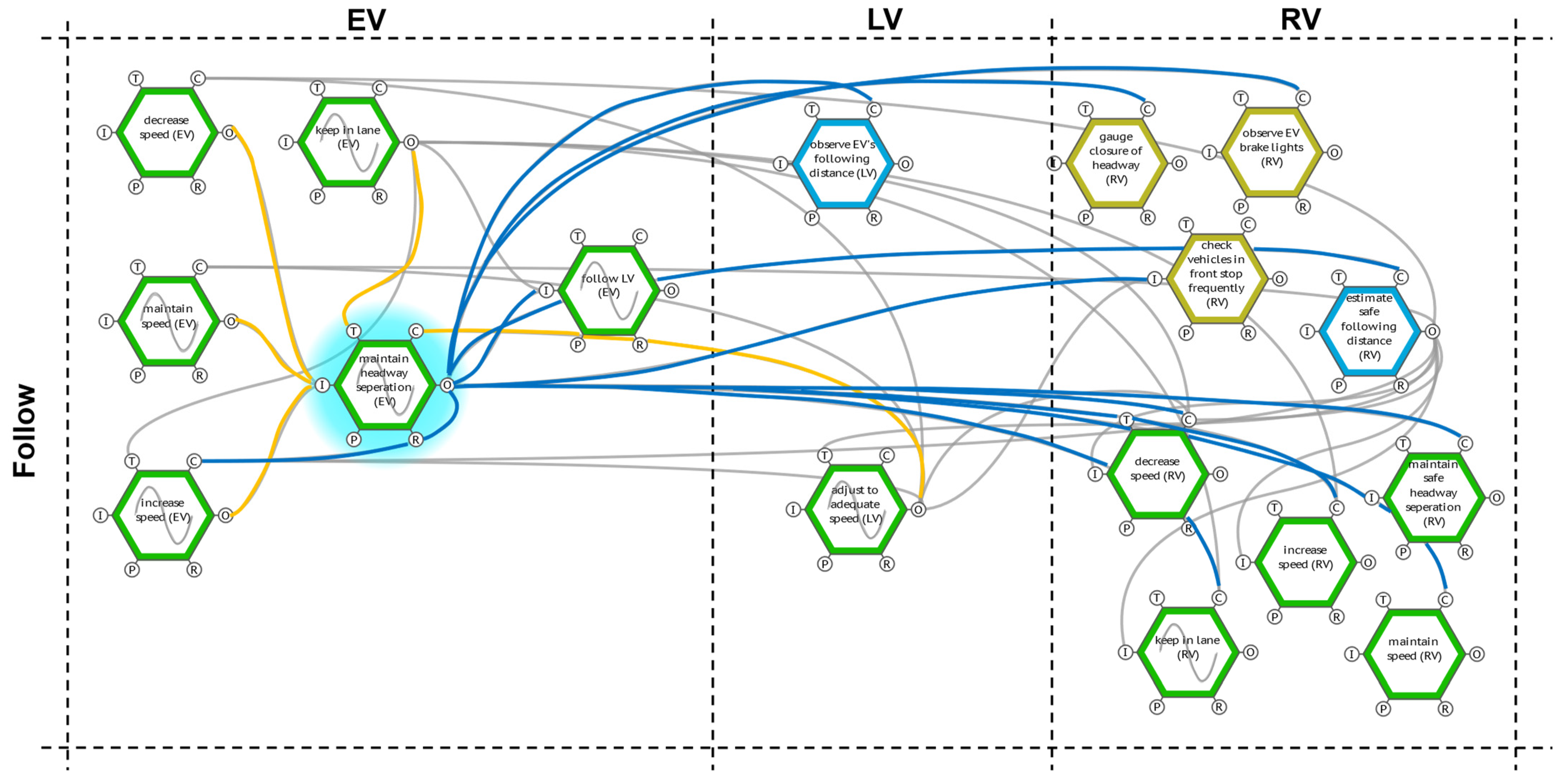
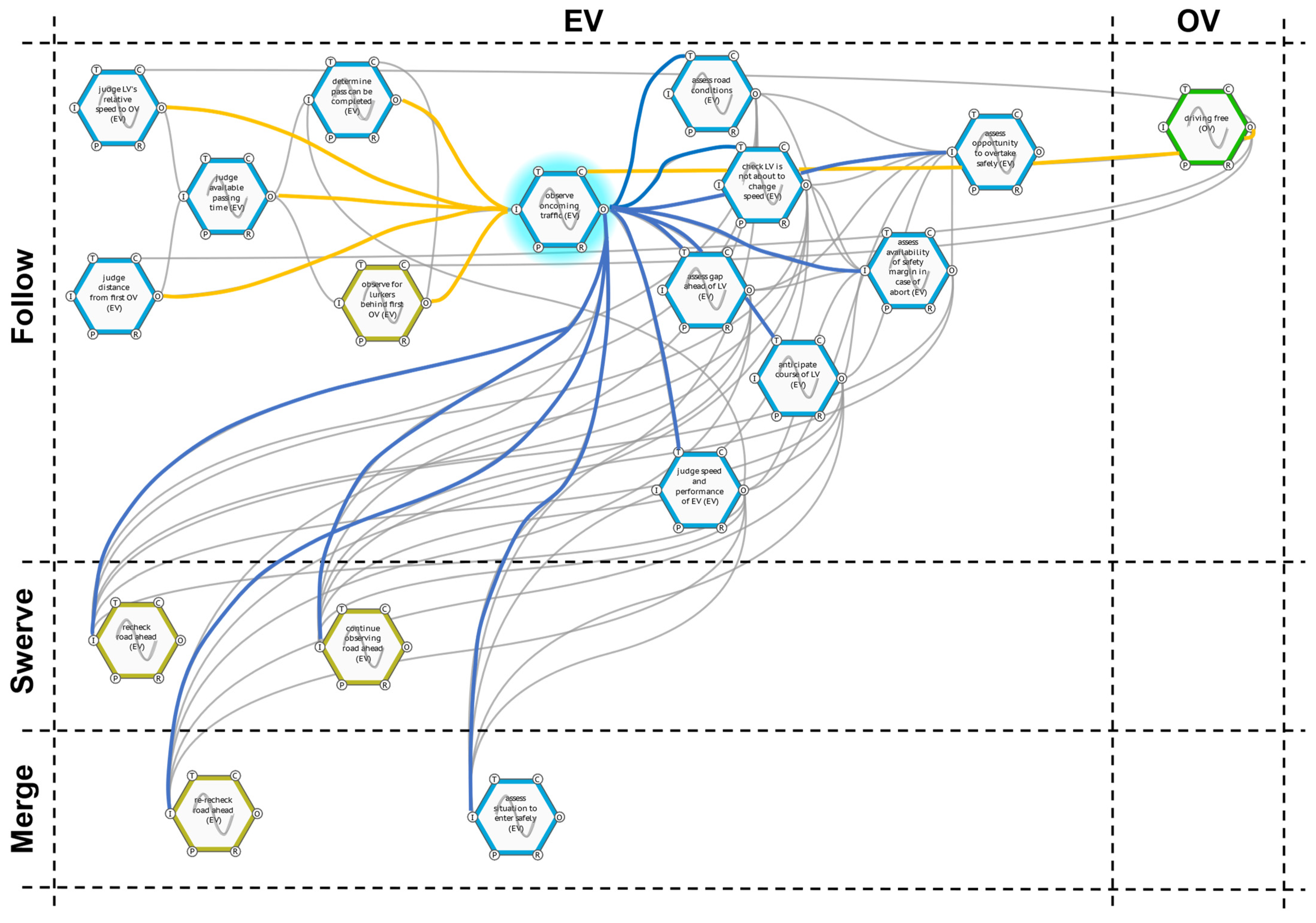
4.1. The Overall FRAM Model
- Driving functions:
- ○
- Yellow → perception driving tasks (e.g., to monitor road layout ahead of LV)
- ○
- Blue → cognition driving tasks (e.g., to assess the opportunity to overtake safely)
- ○
- Green → action driving tasks (e.g., to decrease speed)
- ○
- Orange → main manoeuvre tasks (e.g., to follow LV)
- Functions affecting driving:
- ○
- Red → characteristics of the infrastructure (e.g., to provide road signs)
- ○
- White → characteristics of the environment (e.g., to enable clear view on the road ahead (weather conditions, etc.)
- ○
- Grey → technical functions of the vehicle (e.g., to provide steering wheel)
- ○
- Purple → information by the policy (e.g., to provide safe braking distances by Highway Code)
4.2. Comparison of the Contributions between Human Driver and Automation to Road Safety Based on Systemic Mechanisms
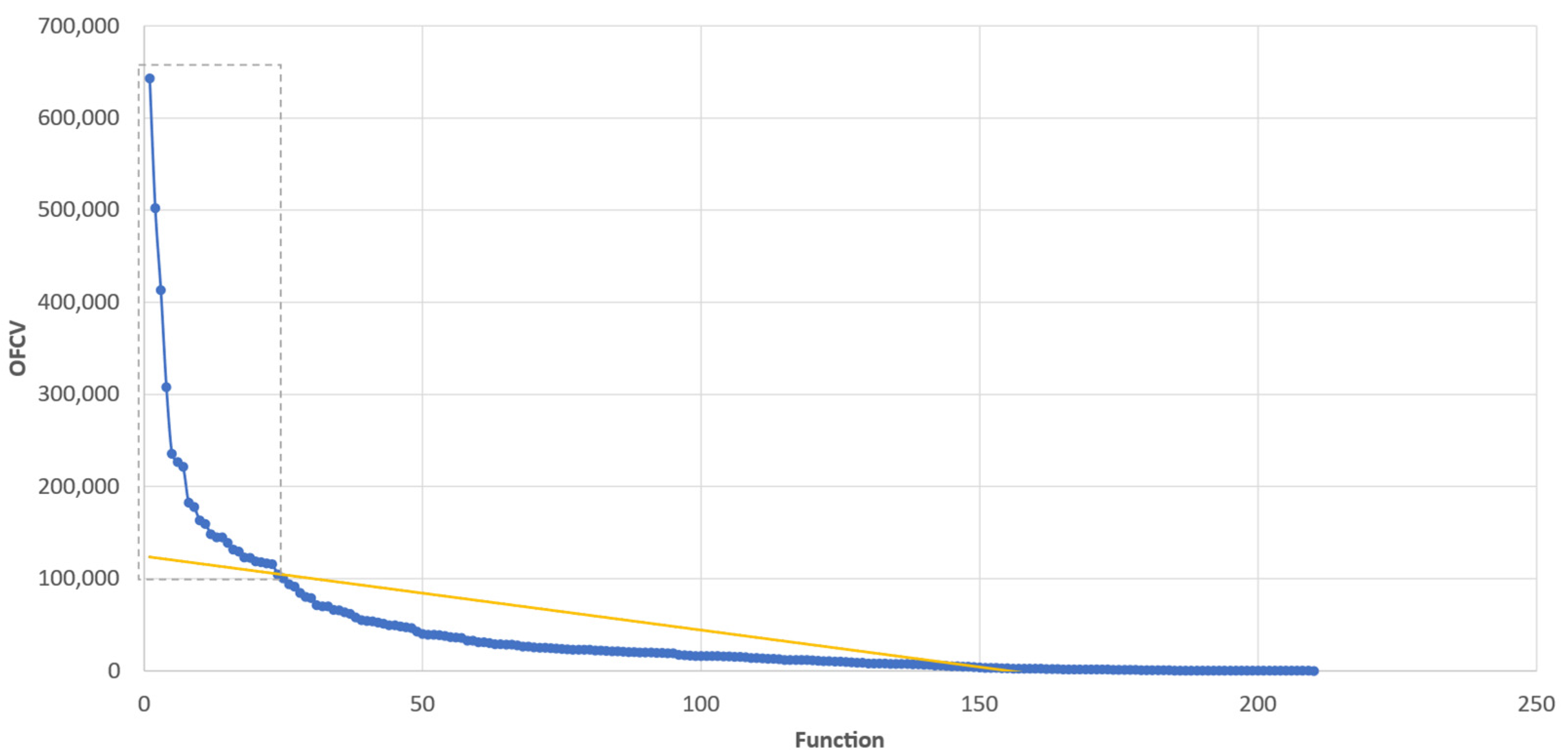
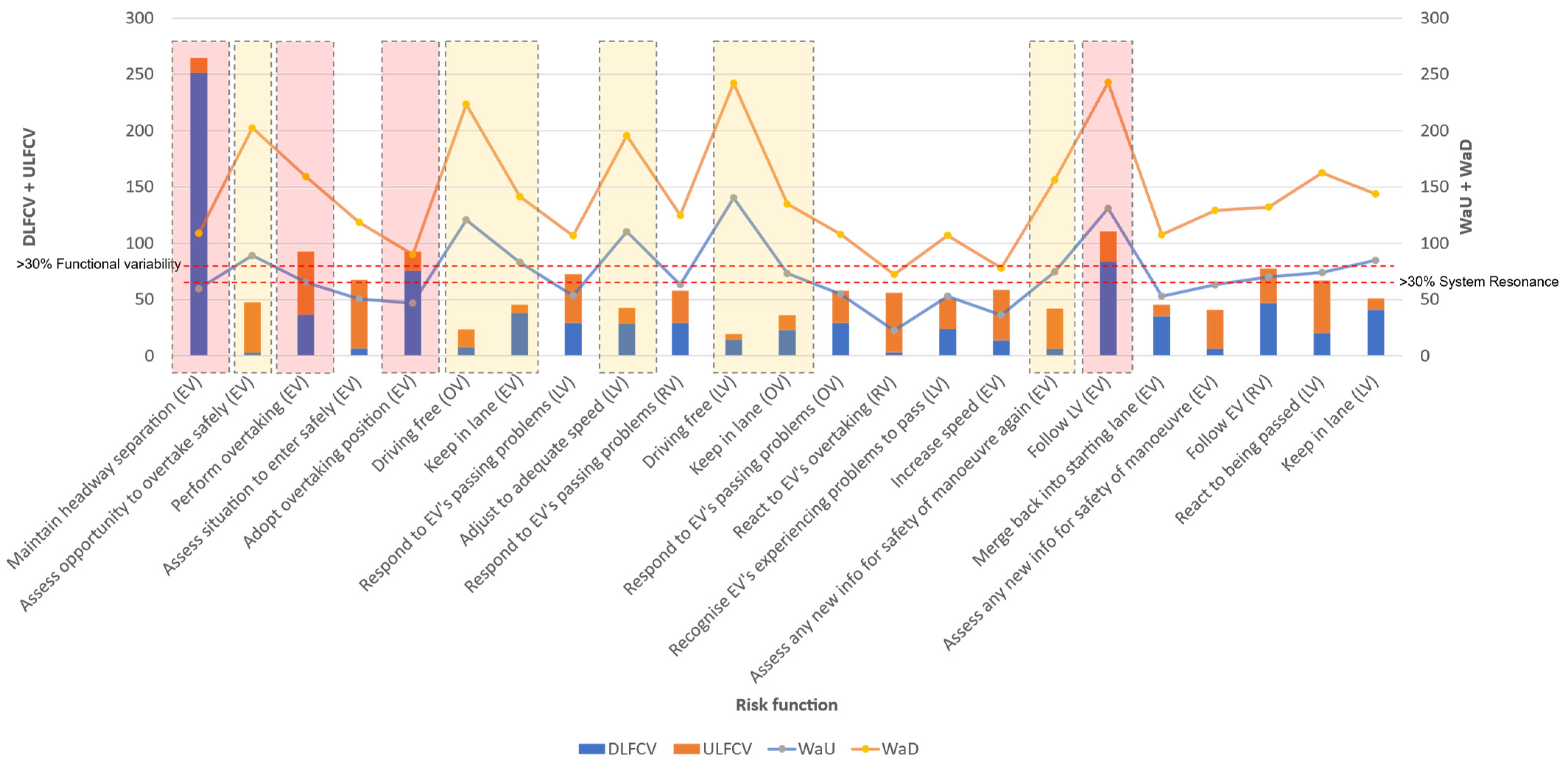
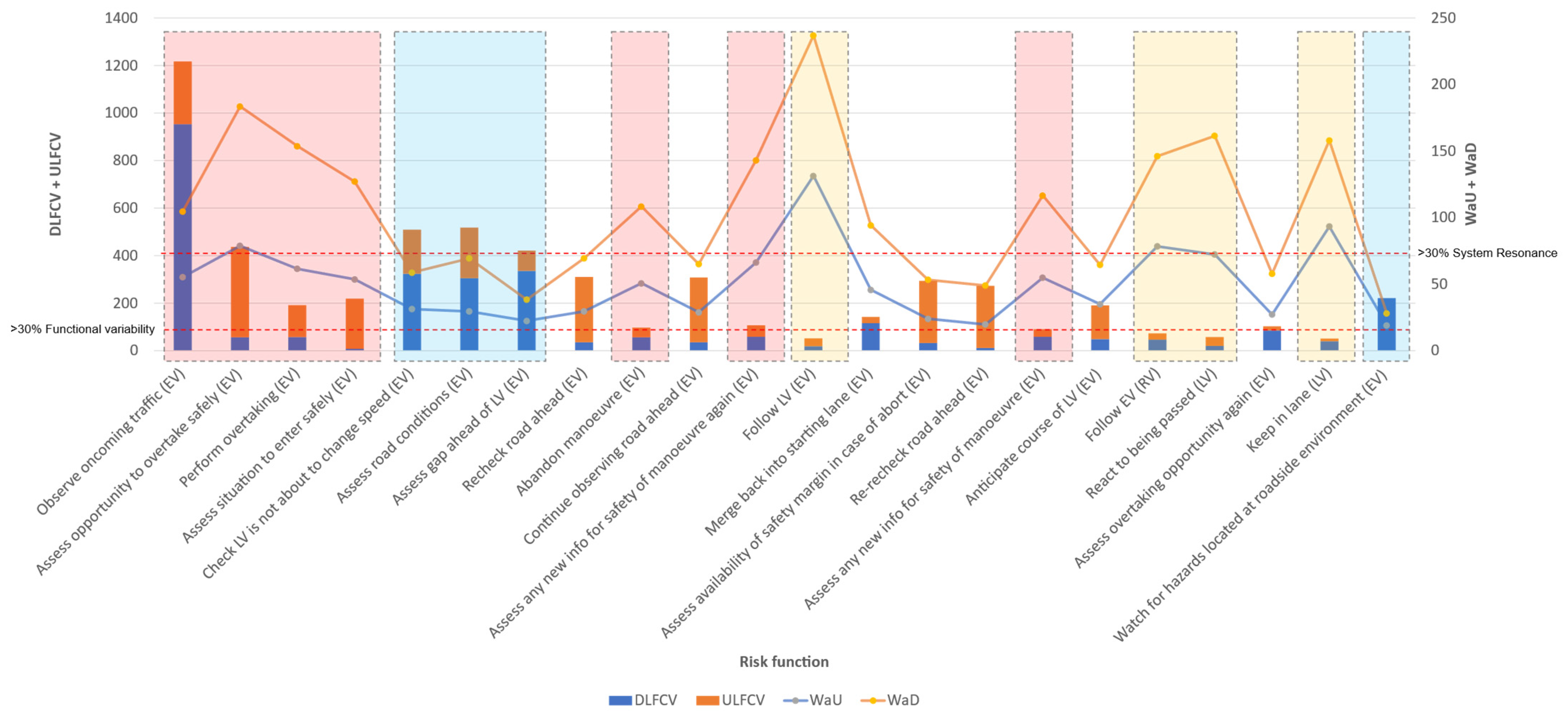
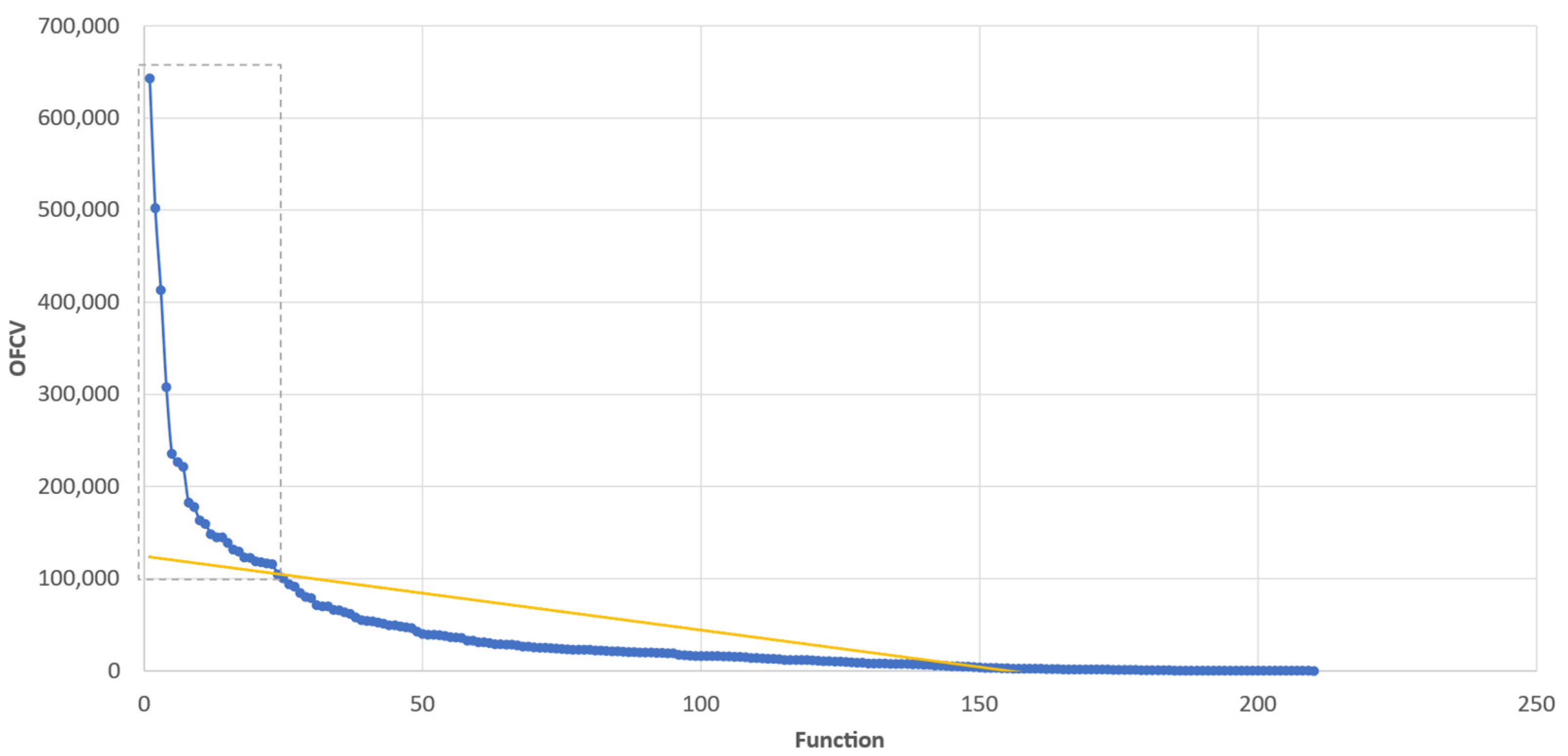
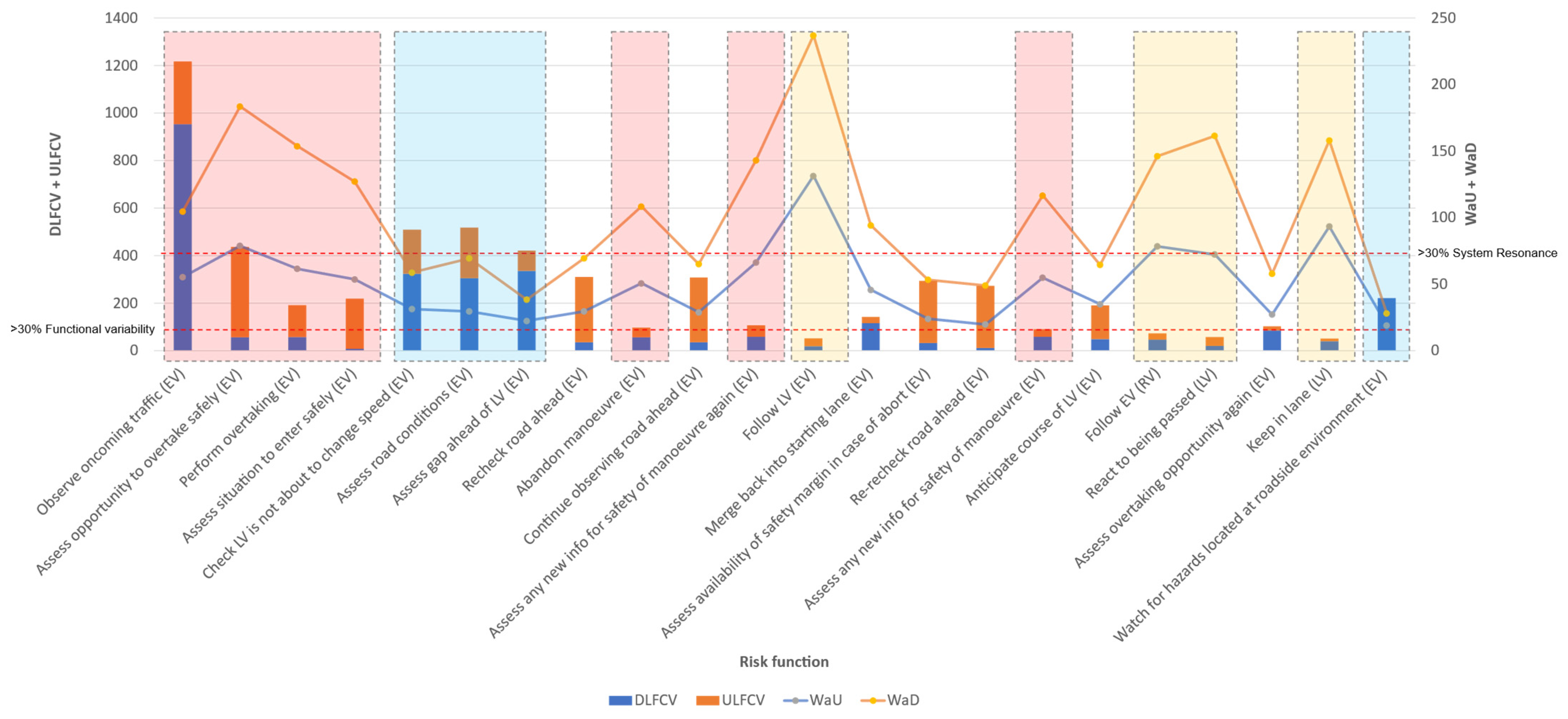
4.2.1. Prioritisation and Analysis of Risk Functions
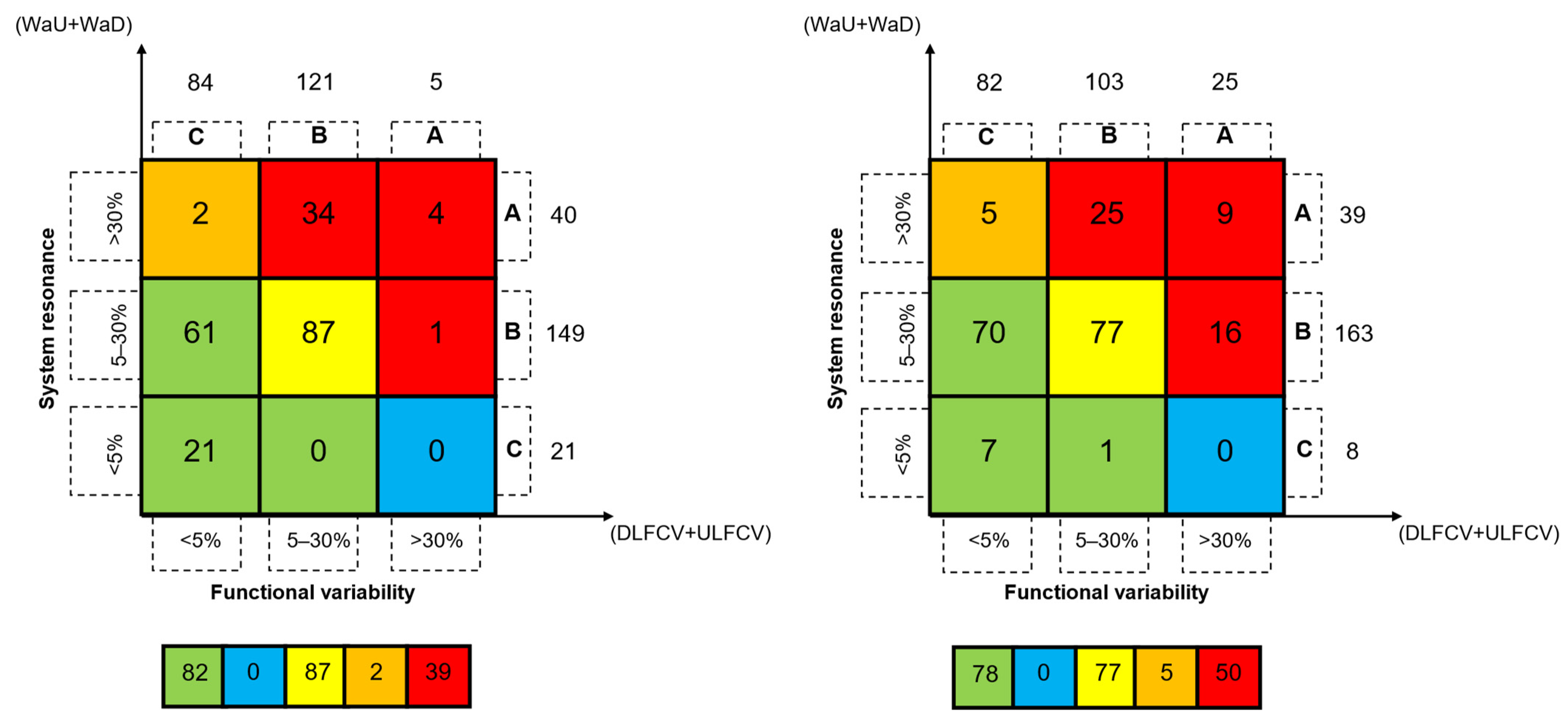
4.2.2. Analysis of Global System Variability
4.2.3. Distinguishing the Interaction and Variability of System Functions for Potential Critical Functional Resonance
4.2.4. Analysis of Critical Paths
4.3. Recommendations for System Design and Validation
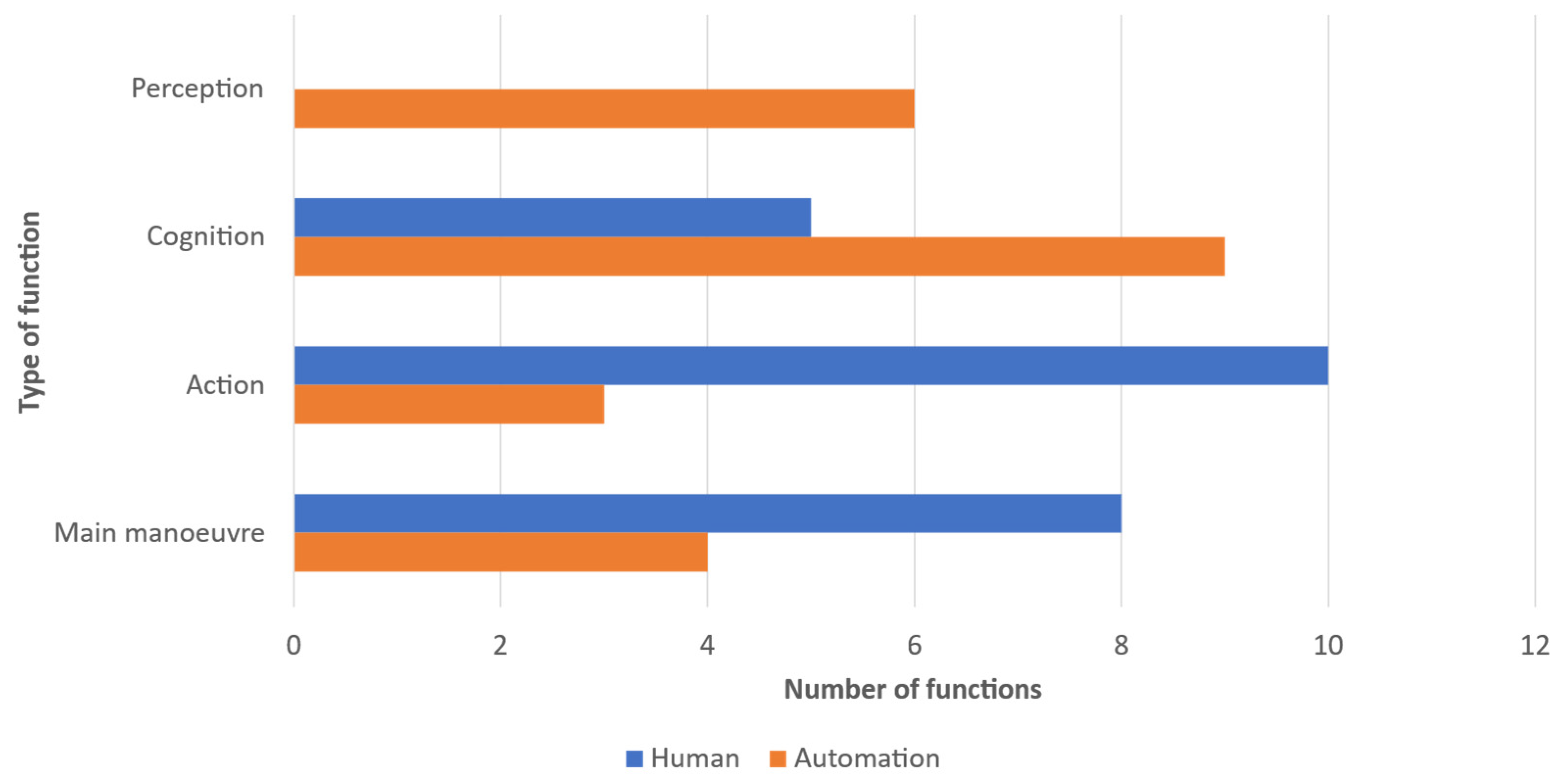
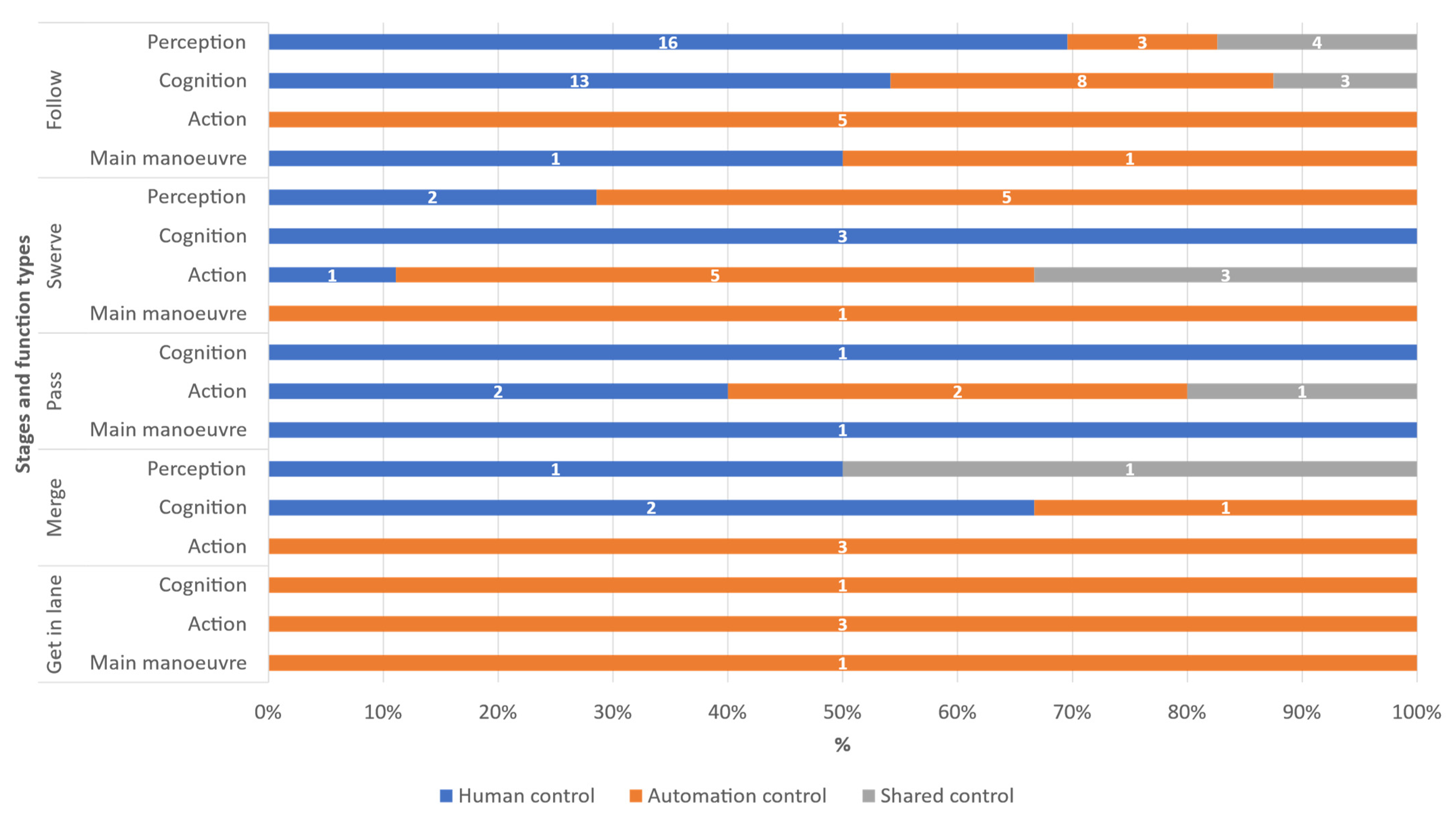
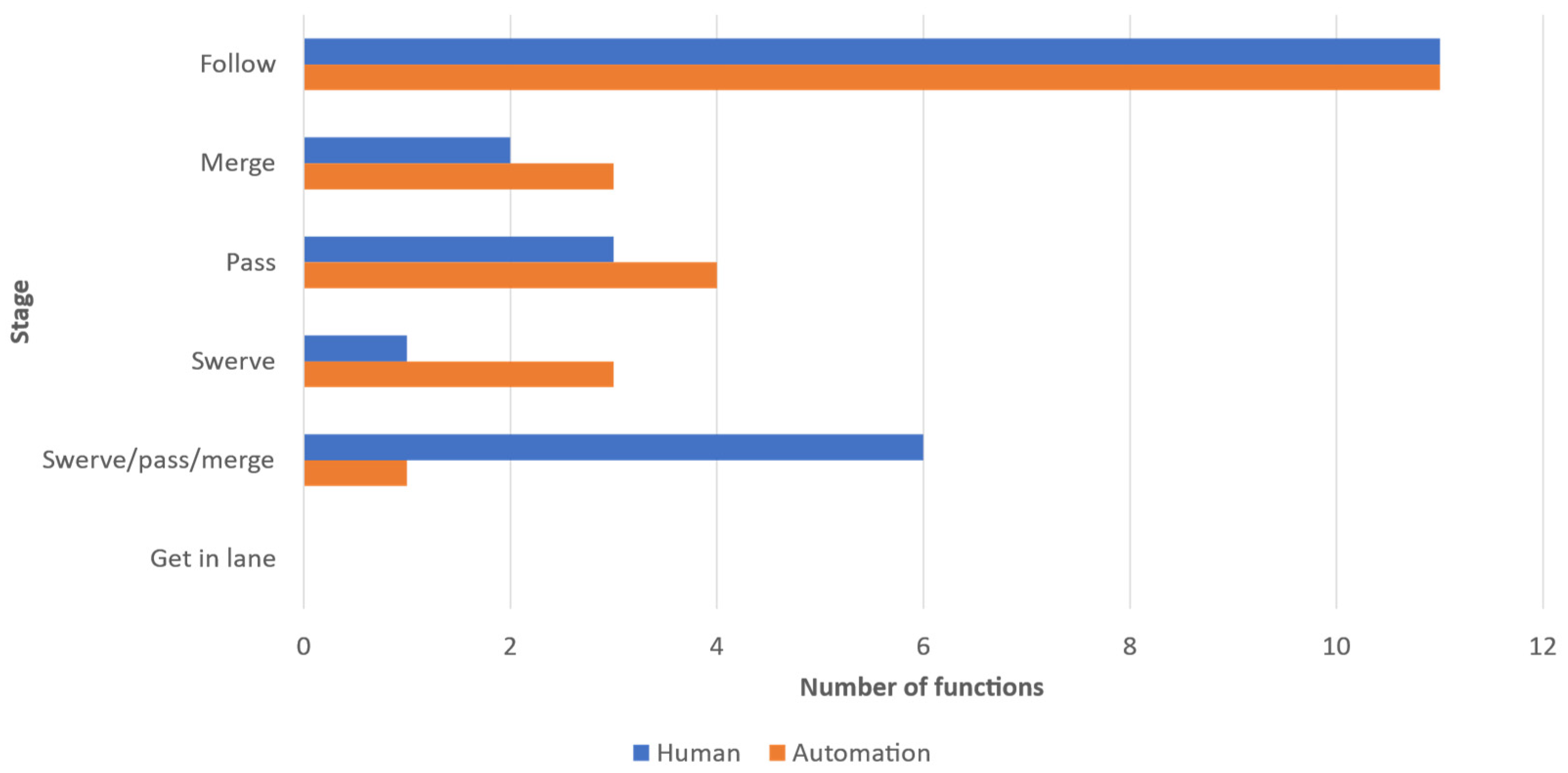
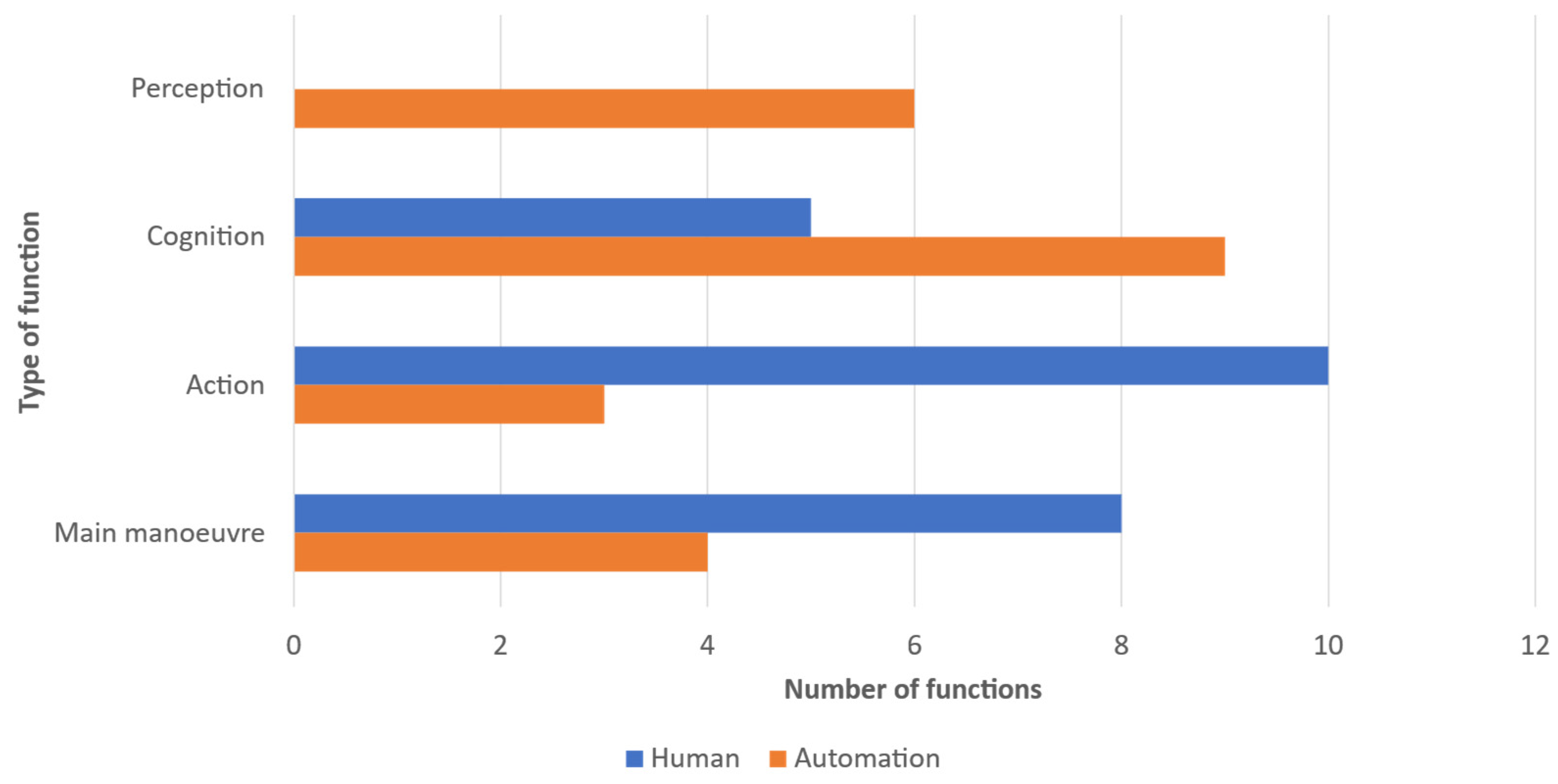
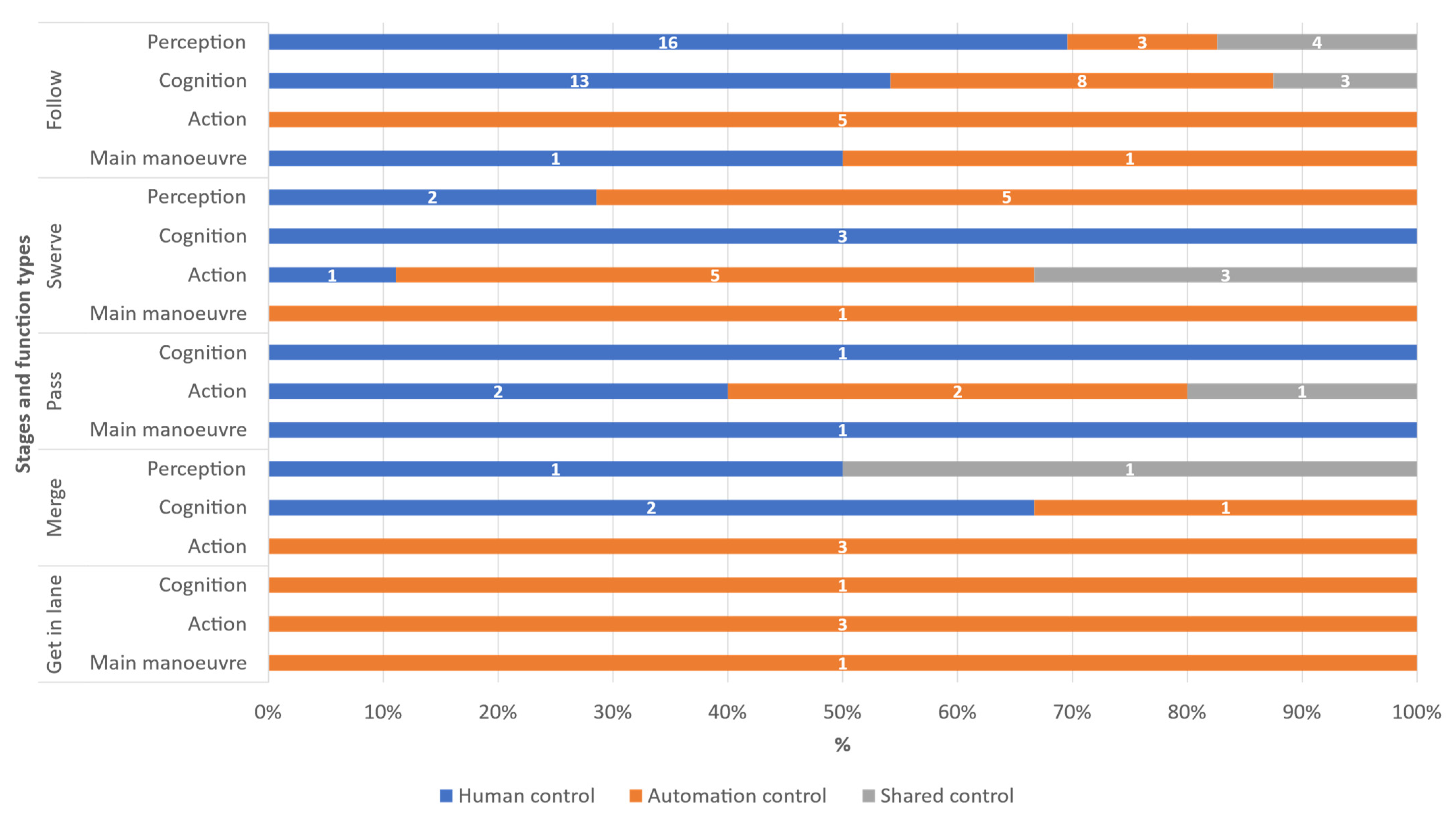
4.3.1. Function Allocation between Human Driver and Automation
4.3.2. Validation Focus of AD
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variability Phenotype | Variability Manifestation | |
|---|---|---|
| Timing | Too early | 2 |
| On time | 1 | |
| Too late | 4 | |
| Not at all | 5 | |
| Precision | Imprecise | 5 |
| Acceptable | 3 | |
| Precise | 1 |
| Upstream Output Variability | Input | Precondition | Resource | Control | Time | |
|---|---|---|---|---|---|---|
| Timing variability of output | Too early | A/NE | A | NE/D | A | A |
| On time | D | D | D | D | D | |
| Too late | A | A | A | A | A | |
| Not at all | A | A | A | A | A | |
| Precision variability of output | Imprecise | A | A | A | A | A |
| Acceptable | NE | NE | NE | NE | NE | |
| Precise | D | D | D | D | D | |
Appendix B
Appendix C
| Stage | EV | LV | RV | OV |
|---|---|---|---|---|
| Follow | to follow LV through recognising the following situation, keeping the lane, and maintaining headway separation; to decide to overtake or not, which is mainly based on assessing the opportunity to overtake safely, judging whether overtaking is permitted, and evaluating the reasonableness for overtaking | to drive free by keeping the lane and adjusting adequate speed; to react to being followed by EV through observing EV’s intention to overtake as well as its following distance | to follow EV through recognising the following situation, keeping the lane, and maintaining headway separation | to drive free by keeping the lane and adjusting adequate speed |
| Swerve | to adopt the overtaking position by lane keeping, reducing headway from the normal following, and adjusting the speed to that of LV; to swerve completely to the oncoming lane afterwards checking any hazards behind or in front, assessing the overtaking opportunity is still safe and using the left indicator | to detect EV’s swerving into the oncoming lane; to maintain speed; to react to being passed by responding to potential passing problems of EV (optional) | to detect EV’s swerving into the oncoming lane; to react to being passed by responding to potential passing problems of EV (optional) | to detect EV’s swerving into the oncoming lane; to maintain speed; to react to being passed by responding to potential passing problems of EV (optional) |
| Pass | to perform the overtaking through accelerating LV decisively or merging back into starting lane if the manoeuvre is unsafe and abandoning the manoeuvre | to detect the passing vehicle in peripheral vision; to react to being passed by responding to potential passing problems of EV (optional) | to react to being passed by responding to potential passing problems of EV (optional) | to react to being passed by responding to potential passing problems of EV (optional) |
| Merge | to merge progressively into the starting lane by adjusting EV’s speed in relation to other traffic, assessing the situation to enter safely, and using the right indicator | to prepare to provide a larger opening for EV to merge back; to react to being passed by responding to potential passing problems of EV (optional) | to prepare to provide larger space to LV in case of EV’s manoeuvre abandoning or to catch up to LV; to react to being passed by responding to potential passing problems of EV (optional) | to prepare for braking; to react to being passed by responding to potential passing problems of EV (optional) |
| Get in lane | to complete the overtaking through positioning into the starting lane evaluating the driving situation, and resuming at the desired speed | to follow EV; to react to being followed by RV | to follow LV | to drive free |
Appendix D
| Risk Function | Human | Automation |
|---|---|---|
| Follow LV (EV) | x | x |
| Maintain headway separation (EV) | x | |
| Perform overtaking (EV) | x | x |
| Assess opportunity to overtake safely (EV) | x | x |
| Check LV is not about to change speed (EV) | x | |
| Follow EV (RV) | x | x |
| React to being passed (LV) | x | x |
| Assess road conditions (EV) | x | |
| Adopt overtaking position (EV) | x | |
| Assess gap ahead of LV (EV) | x | |
| Driving free (OV) | x | |
| Keep in lane (LV) | x | x |
| Keep in lane (EV) | x | |
| Recheck road ahead (EV) | x | |
| Abandon manoeuvre (EV) | x | |
| Assess any new info for safety of manoeuvre again (EV) | x | x |
| Respond to EV’s passing problems (LV) | x | |
| Adjust to adequate speed (LV) | x | |
| Respond to EV’s passing problems (RV) | x | |
| Merge back into starting lane (EV) | x | x |
| Assess situation to enter safely (EV) | x | x |
| Continue observing road ahead (EV) | x | |
| Driving free (LV) | x | |
| Keep in lane (OV) | x | |
| Respond to EV’s passing problems (OV) | x | |
| Assess availability of safety margin in case of abort (EV) | x | |
| Re-recheck road ahead (EV) | x | |
| React to EV’s overtaking (RV) | x | |
| Anticipate course of LV (EV) | x | |
| Recognise that EV is experiencing problems passing (LV) | x | |
| Increase speed (EV) | x | |
| Assess overtaking opportunity again (EV) | x | |
| Assess any new info for safety of manoeuvre (EV) | x | x |
| Watch for hazards located at roadside environment (EV) | x |
References
- Hughes, B.P.; Anund, A.; Falkmer, T. A comprehensive conceptual framework for road safety strategies. Accid. Anal. Prev. 2016, 90, 13–28. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Global Status Report on Road Safety; WHO Library Cataloguing-in-Publication Data; WHO: Geneva, Switzerland, 2020. [Google Scholar]
- SAE On-Road Automated Vehicle Standards Committee. Taxonomy and Definitions for Terms Related to on-Road Motor Vehicle Automated driving Systems; J3016_201806; SAE International: Warrendale, PA, USA, 2018; pp. 1–16. [Google Scholar]
- Hendricks, D.L.; Fell, J.C.; Freedman, M. The Relative Frequency of Unsafe Driving Acts in Serious Injury Accidents; Final report submitted to NHTSA under contract No. DOT NH 22 94 C 05020; Veridian engineering; Springer: Buffalo, NY, USA, 2001. [Google Scholar]
- Otte, D.; Pund, B.; Jänsch, M. A new approach of accident causation analysis by seven steps ACASS. In Proceedings of the International Technical Conference on the Enhanced Safety of Vehicles, Stuttgart, Germany, 15–18 June 2009; National Highway Traffic Safety Administration: Washington, DC, USA, 2009; Volume 2009. [Google Scholar]
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; (No. DOT HS 812 115); NHTSA’s National Center for Statistics and Analysis: Washington, DC, USA, 2015. [Google Scholar]
- Dingus, T.A.; Guo, F.; Lee, S.; Antin, J.F.; Perez, M.; Buchanan-King, M.; Hankey, J. Driver crash risk factors and prevalence evaluation using naturalistic driving data. Proc. Natl. Acad. Sci. USA 2016, 113, 2636–2641. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Woods, D.; Dekker, S. Anticipating the effects of technological change: A new era of dynamics for human factors. Theor. Issues Ergon. Sci. 2000, 1, 272–282. [Google Scholar] [CrossRef]
- Drösler, J. Zur Methodik der Verkehrspsychologie. In Psychologie des Straßenwesens; Hoyos, C., Ed.; Huber: Bern, Switzerland; Stuttgart, Germany, 1965. [Google Scholar]
- Rasmussen, J. Risk management in a dynamic society: A modelling problem. Saf. Sci. 1997, 27, 183–213. [Google Scholar] [CrossRef]
- Awal Street Journal. Systems Thinking Speech by Dr. Russell Ackoff [Video]. Available online: https://www.youtube.com/watch?v=EbLh7rZ3rhU (accessed on 22 August 2021).
- Grabbe, N.; Kellnberger, A.; Aydin, B.; Bengler, K. Safety of automated driving: The need for a systems approach and application of the functional resonance analysis method. Saf. Sci. 2020, 126, 104665. [Google Scholar] [CrossRef]
- Bengler, K.; Winner, H.; Wachenfeld, W. No Human–No Cry? Automatisierungstechnik 2017, 65, 471–476. [Google Scholar] [CrossRef]
- Wiener, E.L.; Curry, R.E. Flight-deck automation: Promises and problems. Ergonomics 1980, 23, 995–1011. [Google Scholar] [CrossRef]
- Billings, C. Aviation Automation; Lawrence Erlbaum: Mahwah, NJ, USA, 1993. [Google Scholar]
- Stanton, N.A.; Marsden, P. From fly-by-wire to drive-by-wire: Safety implications of automation in vehicles. Saf. Sci. 1996, 24, 35–49. [Google Scholar] [CrossRef] [Green Version]
- Sarter, N.B.; Amalberti, R. (Eds.) Cognitive Engineering in the Aviation Domain; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Noy, I.Y.; Shinar, D.; Horrey, W.J. Automated driving: Safety blind spots. Saf. Sci. 2018, 102, 68–78. [Google Scholar] [CrossRef]
- Hollnagel, E. Understanding accidents-from root causes to performance variability. In Proceedings of the IEEE 7th conference on human factors and power plants, Scottsdale, AZ, USA, 19 September 2002; IEEE: New York, NY, USA, 2002; p. 1. [Google Scholar]
- Qureshi, Z.H. A review of accident modelling approaches for complex socio-technical systems. In Proceedings of the 1757 twelfth Australian Workshop on Safety Critical Systems and Software and Safety-Related Programmable Systems, Adeleide, Australia, 30–31 August 2007; Australian Computer Society, Inc.: Darlinghurst, Australia, 2007; Volume 86, pp. 47–59. [Google Scholar]
- Hollnagel, E. Barriers and Accident Prevention Ashgate; Routledge: Hampshire, UK, 2004. [Google Scholar]
- Wienen, H.C.A.; Bukhsh, F.A.; Vriezekolk, E.; Wieringa, R.J. Accident Analysis Methods and Models—A Systematic Literature Review. 2017. Available online: https://ris.utwente.nl/ws/portalfiles/portal/13726744/Accident_Analysis_Methods_and_Models_a_Systematic_Literature_Review.pdf (accessed on 16 December 2021).
- Salmon, P.M.; McClure, R.; Stanton, N.A. Road transport in drift? Applying contemporary systems thinking to road safety. Saf. Sci. 2012, 50, 1829–1838. [Google Scholar] [CrossRef]
- Dekker, S.; Cilliers, P.; Hofmeyr, J.H. The complexity of failure: Implications of complexity theory for safety investigations. Saf. Sci. 2011, 49, 939–945. [Google Scholar] [CrossRef]
- Perrow, C. Normal Accidents: Living with High-Risk Technologies; Basic Books: New York, NY, USA, 1984. [Google Scholar]
- Larsson, P.; Dekker, S.W.; Tingvall, C. The need for a systems theory approach to road safety. Saf. Sci. 2010, 48, 1167–1174. [Google Scholar] [CrossRef]
- Hughes, B.P.; Newstead, S.; Anund, A.; Shu, C.C.; Falkmer, T. A review of models relevant to road safety. Accid. Anal. Prev. 2015, 74, 250–270. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Busch, C. If You Can’t Measure It—Maybe You Shouldn’t: Reflections on Measuring Safety, Indicators, and Goals; Mind The Risk: Wroclaw, Poland, 2019. [Google Scholar]
- Hollnagel, E. Safety-I and Safety-II: The Past and Future of Safety Management; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Dekker, S. Drift into Failure: From Hunting Broken Components to Understanding Complex Systems; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Patriarca, R. Developing Risk and Safety Management Methods for Complex Sociotechnical Systems: From Newtonian Reasoning to Resilience Engineering. Ph.D. Thesis, Sapienza University of Rome, Rome, Italy, 2017. Available online: http://hdl.handle.net/11573/1194043 (accessed on 30 January 2021).
- Hollnagel, E.; Woods, D.D.; Leveson, N. (Eds.) Resilience Engineering: Concepts and Precepts; Ashgate Publishing, Ltd.: Farnham, UK, 2006. [Google Scholar]
- Grabbe, N.; Höcher, M.; Thanos, A.; Bengler, K. Safety Enhancement by Automated Driving: What are the Relevant Scenarios? Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2020, 64, 1686–1690. [Google Scholar] [CrossRef]
- Hollnagel, E. Advancing resilient performance: From instrumental applications to second-order solutions. In Proceedings of the REA Symposium on Resilience Engineering Embracing Resilience, Toulouse, France, 21–24 June 2019. [Google Scholar]
- Ferreira, P.N.; Cañas, J.J. Assessing operational impacts of automation using functional resonance analysis method. Cogn. Technol. Work. 2019, 21, 535–552. [Google Scholar] [CrossRef]
- Nemeth, C. Erik Hollnagel: FRAM: The functional resonance analysis method, modeling complex socio-technical systems. Cogn. Technol. Work. 2013, 1, 117–118. [Google Scholar] [CrossRef]
- Hollnagel, E. FRAM: The Functional Resonance Analysis Method: Modelling Complex Socio-Technical Systems; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Woltjer, R.; Hollnagel, E. Functional modeling for risk assessment of automation in a changing air traffic management environment. In Proceedings of the 4th International Conference Working on Safety, Graz, Austria, 21–23 April 2008; Volume 30. [Google Scholar]
- Patriarca, R.; Bergström, J. Modelling complexity in everyday operations: Functional resonance in maritime mooring at quay. Cogn. Technol. Work. 2017, 19, 711–729. [Google Scholar] [CrossRef]
- Patriarca, R.; Di Gravio, G.; Woltjer, R.; Costantino, F.; Praetorius, G.; Ferreira, P.; Hollnagel, E. Framing the FRAM: A literature review on the functional resonance analysis method. Saf. Sci. 2020, 129, 104827. [Google Scholar] [CrossRef]
- Hollnagel, E.; Pruchnicki, S.; Woltjer, R.; Etcher, S. Analysis of Comair flight 5191 with the functional resonance accident model. In Proceedings of the 8th International Symposium of the Australian Aviation Psychology Association, Sydney, Australia, 8–11 April 2008. [Google Scholar]
- De Carvalho, P.V.R. The use of functional resonance analysis method (FRAM) in a mid-air collision to understand some characteristics of the air traffic management system resilience. Reliab. Eng. Syst. Saf. 2011, 96, 1482–1498. [Google Scholar] [CrossRef]
- Adriaensen, A.; Patriarca, R.; Smoker, A.; Bergström, J. A socio-technical analysis of functional properties in a joint cognitive system: A case study in an aircraft cockpit. Ergonomics 2019, 62, 1598–1616. [Google Scholar] [CrossRef]
- Alm, H.; Woltjer, R. Patient Safety Investigation through the Lens of FRAM. Human Factors: A System View of Human, Technology and Organization; Shaker Publishing: Maastricht, The Netherlands, 2010; pp. 153–165. [Google Scholar]
- Patriarca, R.; Falegnami, A.; Costantino, F.; Bilotta, F. Resilience engineering for socio-technical risk analysis: Application in neurosurgery. Reliab. Eng. Syst. Saf. 2018, 180, 321–335. [Google Scholar] [CrossRef]
- Schutijser, B.C.F.M.; Jongerden, I.P.; Klopotowska, J.E.; Portegijs, S.; de Bruijne, M.C.; Wagner, C. Double checking injectable medication administration: Does the protocol fit clinical practice? Saf. Sci. 2019, 118, 853–860. [Google Scholar] [CrossRef] [Green Version]
- Lundblad, K.; Speziali, J.; Woltjer, R.; Lundberg, J. FRAM as a risk assessment method for nuclear fuel transportation. In Proceedings of the 4th International Conference Working on Safety, Graz, Austria, 21–23 April 2008; Volume 1, pp. S223–S231. [Google Scholar]
- Hollnagel, E.; Fujita, Y. The Fukushima disaster–systemic failures as the lack of resilience. Nucl. Eng. Technol. 2013, 45, 13–20. [Google Scholar] [CrossRef] [Green Version]
- Macchi, L.; Oedewald, P.; Eitrheim, M.R.; Axelsson, C. Understanding maintenance activities in a macrocognitive work system. In Proceedings of the 30th European Conference on Cognitive Ergonomics, Edinburgh, UK, 28–31 August 2012; pp. 52–57. [Google Scholar]
- Shirali, G.A.; Ebrahipour, V.; Mohammd Salahi, L. Proactive risk assessment to identify emergent risks using functional resonance analysis method (fram): A case study in an oil process unit. Iran Occup. Health 2013, 10, 33–46. [Google Scholar]
- Franca, J.E.; Hollnagel, E.; dos Santos, I.J.L.; Haddad, A.N. Analysing human factors and non-technical skills in offshore drilling operations using FRAM (functional resonance analysis method). Cogn. Technol. Work. 2021, 23, 553–566. [Google Scholar] [CrossRef]
- Praetorius, G.; Lundh, M.; Lützhöft, M. Learning from the past for proactivity: A re-analysis of the accident of the MV Herald of free enterprise. In Proceedings of the Fourth Resilience Engineering Symposium, Sophia-Antipolis, France, 8–10 June 2011; pp. 217–225. [Google Scholar]
- Smith, D.; Veitch, B.; Khan, F.; Taylor, R. Using the FRAM to understand Arctic ship navigation: Assessing work processes during the Exxon Valdez grounding. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 447–457. [Google Scholar] [CrossRef]
- Steen, R.; Aven, T. A risk perspective suitable for resilience engineering. Saf. Sci. 2011, 49, 292–297. [Google Scholar] [CrossRef]
- Belmonte, F.; Schön, W.; Heurley, L.; Capel, R. Interdisciplinary safety analysis of complex socio-technological systems based on the functional resonance accident model: An application to railway traffic supervision. Reliab. Eng. Syst. Saf. 2011, 96, 237–249. [Google Scholar] [CrossRef] [Green Version]
- Hlaing, K.P.; Aung, N.T.T.; Hlaing, S.Z.; Ochimizu, K. Functional resonance analysis method on road accidents in myanmar. In Proceedings of the 2nd International Conference on Advanced Information Technologies (ICAIT), Yangon, Myanmar, 1–2 November 2018; pp. 107–113. [Google Scholar]
- Hirose, T.; Sawaragi, T.; Nomoto, H.; Michiura, Y. Functional safety analysis of SAE conditional driving automation in time-critical situations and proposals for its feasibility. Cogn. Technol. Work. 2021, 23, 639–657. [Google Scholar] [CrossRef]
- Anfara, V.A.; Brown, K.M.; Mangione, T.L. Qualitative analysis on stage: Making the research process more public. Educ. Res. 2002, 31, 28–38. [Google Scholar] [CrossRef] [Green Version]
- Creswell, J.W.; Miller, D.L. Determining validity in qualitative inquiry. Theory Pract. 2000, 39, 124–130. [Google Scholar] [CrossRef]
- Creswell, J.W.; Poth, C.N. Qualitative Inquiry and Research Design: Choosing among Five Approaches; Sage Publications: Thousand Oaks, CA, USA, 2016. [Google Scholar]
- Destatis. Verkehrsunfälle—Fachserie 8 Reihe 7—018. 2019. Available online: https://www.destatis.de/DE/Themen/Gesellschaft-Umwelt/Verkehrsunfaelle/Publikationen/Downloads-Verkehrsunfaelle/verkehrsunfaelle-jahr-2080700187004.html (accessed on 16 December 2021).
- Richter, T.; Ruhl, S. Untersuchung von Maßnahmen zur Prävention von Überholunfällen auf einbahnigen Landstraßen; Unfallforschung der Versicherer, GDV: Berlin, Germany, 2014. [Google Scholar]
- Netzer, M. Der Überholvorgang auf zweispurigen Straßen und seine Grundelemente unter besonderer Berücksichtigung der Verkehrssicherheit. 1966. [Google Scholar]
- Walker, G.H.; Stanton, N.A.; Salmon, P.M. Human Factors in Automotive Engineering and Technology; Ashgate: Farnham, UK, 2015. [Google Scholar]
- McKnight, A.J.; Adams, B.B. Driver Education Task Analysis. Task Descriptions; Human Resources Research Organization: Alexandria, VA, USA, 1970; Volume 1. [Google Scholar]
- Hollnagel, E.; Hill, R. Instructions for use of the FRAM Model Visualiser (FMV). 2020. Available online: https://functionalresonance.com/onewebmedia/FMV_instructions_2.1.pdf (accessed on 1 March 2021).
- Hollnagel, E. FRAM Model Interpreter. 2020. Available online: https://functionalresonance.com/onewebmedia/FMI%20basicPlus%20V3.pdf (accessed on 1 March 2021).
- Risser, R.; Brandstätter, C. Die Wiener Fahrprobe. Freie Beobachtung. 1985, Volume 21. Available online: https://trid.trb.org/view/1034307 (accessed on 16 December 2021).
- Patriarca, R.; Di Gravio, G.; Costantino, F. A Monte Carlo evolution of the functional resonance analysis method (FRAM) to assess performance variability in complex systems. Saf. Sci. 2017, 91, 49–60. [Google Scholar] [CrossRef]
- Patriarca, R.; Di Gravio, G.; Costantino, F. myFRAM: An open tool support for the functional resonance analysis method. In Proceedings of the 2017 2nd International Conference on System Reliability and Safety (ICSRS), Milan, Italy, 20–22 December 2017; IEEE: New York, NY, USA, 2017; pp. 439–443. [Google Scholar]
- Falegnami, A.; Costantino, F.; Di Gravio, G.; Patriarca, R. Unveil key functions in socio-technical systems: Mapping FRAM into a multilayer network. Cogn. Technol. Work. 2019, 22, 877–899. [Google Scholar] [CrossRef]
- Bellini, E.; Ceravolo, P.; Nesi, P. Quantify resilience enhancement of UTS through exploiting connected community and internet of everything emerging technologies. ACM Trans. Internet Technol. (TOIT) 2017, 18, 1–34. [Google Scholar] [CrossRef]
- Borgatti, S.P. Centrality and network flow. Soc. Netw. 2005, 27, 55–71. [Google Scholar] [CrossRef]
- Patriarca, R.; Bergström, J.; Di Gravio, G. Defining the functional resonance analysis space: Combining Abstraction Hierarchy and FRAM. Reliab. Eng. Syst. Saf. 2017, 165, 34–46. [Google Scholar] [CrossRef]
- Rasmussen, J.; Lind, M. Coping with Complexity; Risø National Laboratory: Roskilde, Denmark, 1981. [Google Scholar]
- Parasuraman, R.; Sheridan, T.B.; Wickens, C.D. A model for types and levels of human interaction with automation. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2000, 30, 286–297. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fitts, P.M. Human Engineering for an Effective Air-Navigation and Traffic-Control System; National Research Council: Washington, DC, USA, 1951. [Google Scholar]
- Sheridan, T.B. Telerobotics, Automation, and Human Supervisory Control; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Inagaki, T. Adaptive automation: Sharing and trading of control. In Handbook of Cognitive Task Design; CRC Press: Boca Raton, FL, USA, 2003; Chapter 8; pp. 147–169. [Google Scholar]
- Hollnagel, E.; Woods, D.D. Joint Cognitive Systems: Foundations of Cognitive Systems Engineering; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Hollnagel, E. A function-centred approach to joint driver-vehicle system design. Cogn. Technol. Work. 2006, 8, 169–173. [Google Scholar] [CrossRef]
- Zhang, Y.; Angell, L.; Bao, S. A fallback mechanism or a commander? A discussion about the role and skill needs of future drivers within partially automated vehicles. Transp. Res. Interdiscip. Perspect. 2021, 9, 100337. [Google Scholar] [CrossRef]
- Michon, J.A. A critical view of driver behavior models: What do we know, what should we do? In Human Behavior and Traffic Safety; Springer: Boston, MA, USA, 1985; pp. 485–524. [Google Scholar]
- Kauer, M.; Schreiber, M.; Bruder, R. How to conduct a car? A design example for maneuver based driver-vehicle interaction. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, La Jolla, CA, USA, 21–24 June 2010; IEEE: New York, NY, USA, 2010; pp. 1214–1221. [Google Scholar]
- Franz, B.; Kauer, M.; Bruder, R.; Geyer, S. pieDrive—A new driver-vehicle interaction concept for maneuver-based driving. In Proceedings of the 2012 International IEEE Intelligent Vehicles Symposium Workshops (W2: Workshop on Human Factors in Intelligent Vehicles), Alcala de Henares, Spain, 3–7 June 2012; Toledo-Moreo, R., Bergasa, L.M., Sotelo, M.A., Eds.; IEEE: New York, NY, USA, 2012. [Google Scholar]
- Walch, M.; Sieber, T.; Hock, P.; Baumann, M.; Weber, M. Towards cooperative driving: Involving the driver in an autonomous vehicle’s decision making. In Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ann Arbor, MI, USA, 24–26 October 2016; pp. 261–268. [Google Scholar]
- Walch, M.; Woide, M.; Mühl, K.; Baumann, M.; Weber, M. Cooperative overtaking: Overcoming automated vehicles’ obstructed sensor range via driver help. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Utrecht, The Netherlands, 21–25 September 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 144–155. [Google Scholar]
- Flemisch, F.; Abbink, D.A.; Itoh, M.; Pacaux-Lemoine, M.P.; Weßel, G. Joining the blunt and the pointy end of the spear: Towards a common framework of joint action, human–machine cooperation, cooperative guidance and control, shared, traded and supervisory control. Cogn. Technol. Work. 2019, 21, 555–568. [Google Scholar] [CrossRef] [Green Version]
- Pacaux-Lemoine, M.P.; Flemisch, F. Layers of shared and cooperative control, assistance, and automation. Cogn. Technol. Work. 2019, 21, 579–591. [Google Scholar] [CrossRef]
- Inagaki, T. Traffic systems as joint cognitive systems: Issues to be solved for realizing human-technology coagency. Cogn. Technol. Work. 2010, 12, 153–162. [Google Scholar] [CrossRef]
- Inagaki, T.; Sheridan, T.B. A critique of the SAE conditional driving automation definition, and analyses of options for improvement. Cogn. Technol. Work. 2019, 21, 569–578. [Google Scholar] [CrossRef] [Green Version]
- Wickens, C.D. Designing for situation awareness and trust in automation. IFAC Proc. Vol. 1995, 28, 365–370. [Google Scholar] [CrossRef]
- Endsley, M.R.; Kiris, E.O. The out-of-the-loop performance problem and level of control in automation. Hum. Factors 1995, 37, 381–394. [Google Scholar] [CrossRef]
- Parasuraman, R.; Riley, V. Humans and automation: Use, misuse, disuse, abuse. Hum. Factors 1997, 39, 230–253. [Google Scholar] [CrossRef]
- Sarter, N.B.; Woods, D.D.; Billings, C.E. Automation surprises. In Handbook of Human Factors and Ergonomics; Wiley: New York, NY, USA, 1997; pp. 1926–1943. [Google Scholar]
- Inagaki, T.; Stahre, J. Human supervision and control in engineering and music: Similarities, dissimilarities, and their implications. Proc. IEEE 2004, 92, 589–600. [Google Scholar] [CrossRef]
- Wilde, G.J. The theory of risk homeostasis: Implications for safety and health. Risk Anal. 1982, 2, 209–225. [Google Scholar] [CrossRef]
- Hollnagel, E. From Function Allocation to Function Congruence. Coping with Computers in the Cockpit (A 00-40958 11-54); Ashgate Publishing: Aldershot, UK; Brookfield, VT, USA, 1999; pp. 29–53. [Google Scholar]
- MacKinnon, R.J.; Pukk-Härenstam, K.; Kennedy, C.; Hollnagel, E.; Slater, D. A novel approach to explore Safety-I and Safety-II perspectives in in situ simulations—The structured what if functional resonance analysis methodology. Adv. Simul. 2021, 6, 21. [Google Scholar] [CrossRef]
- Hill, R.; Boult, M.; Sujan, M.; Hollnagel, E.; Slater, D. Predictive Analysis of Complex Systems’ Behaviour. 2020. Available online: https://www.researchgate.net/profile/David-Slater/publication/343944100_PREDICTIVE_ANALYSIS_OF_COMPLEX_SYSTEMS’_BEHAVIOUR_SWIFTFRAM/links/5f4907e0299bf13c5047f8d3/PREDICTIVE-ANALYSIS-OF-COMPLEX-SYSTEMS-BEHAVIOUR-SWIFTFRAM.pdf (accessed on 16 December 2021).
- Boggs, A.M.; Arvin, R.; Khattak, A.J. Exploring the who, what, when, where, and why of automated vehicle disengagements. Accid. Anal. Prev. 2020, 136, 105406. [Google Scholar] [CrossRef]
- Dixit, V.V.; Chand, S.; Nair, D.J. Autonomous vehicles: Disengagements, accidents and reaction times. PLoS ONE 2016, 11, e0168054. [Google Scholar] [CrossRef] [Green Version]
- Favarò, F.M.; Eurich, S.O.; Nader, N. Analysis of disengagements in autonomous vehicle technology. In Proceedings of the 2018 Annual Reliability and Maintainability Symposium (RAMS), Reno, NV, USA, 22–25 January 2018; IEEE: New York, NY, USA, 2018; pp. 1–7. [Google Scholar]
- Durth, W.; Habermehl, K. Überholvorgänge auf einbahnigen Straßen. Forschung Straßenbau und Straßenverkehrstechnik. Bundesminister für Verkehr; Abt. Strassenbau: Bonn, Germany, 1986. [Google Scholar]
- Gründl, M. Fehler und Fehlverhalten als Ursache von Verkehrsunfällen und Konsequenzen für das Unfallvermeidungspotenzial und die Gestaltung von Fahrerassistenzsystemen. Ph.D. Thesis, University of Regensburg, Regensburg, Germany, July 2005. [Google Scholar]
- Winner, H. Quo vadis, FAS? In Handbuch Fahrerassistenzsysteme; Springer Vieweg: Wiesbaden, Germany, 2015; pp. 1167–1186. [Google Scholar]
- Wachenfeld, W.; Winner, H. The release of autonomous vehicles. In Autonomous Driving; Springer: Berlin/Heidelberg, Germany, 2016; pp. 425–449. [Google Scholar]
- Riedmaier, S.; Ponn, T.; Ludwig, D.; Schick, B.; Diermeyer, F. Survey on scenario-based safety assessment of automated vehicles. IEEE Access 2020, 8, 87456–87477. [Google Scholar] [CrossRef]
- Junietz, P.; Wachenfeld, W.; Klonecki, K.; Winner, H. Evaluation of different approaches to address safety validation of automated driving. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; IEEE: New York, NY, USA, 2018; pp. 491–496. [Google Scholar]
- Bridges, K.E.; Corballis, P.M.; Hollnagel, E. “Failure-to-identify” hunting incidents: A resilience engineering approach. Hum. Factors 2018, 60, 141–159. [Google Scholar] [CrossRef]
- Road Vehicles—Functional Safety—Part 3: Concept Phase; ISO Standard 26262. 2018. Available online: https://www.iso.org/standard/68385.html (accessed on 16 December 2021).
- Underwood, P.; Waterson, P. A critical review of the STAMP, FRAM and Accimap systemic accident analysis models. In Advances in Human Aspects of Road and Rail Transportation; CRC Press: Boca Raton, FL, USA, 2012; pp. 385–394. Available online: https://www.researchgate.net/profile/Patrick-Waterson/publication/236023374_A_critical_review_of_the_STAMP_FRAM_and_Accimap_systemic_accident_analysis_models/links/5696572608ae1c42790399a1/A-critical-review-of-the-STAMP-FRAM-and-Accimap-systemic-accident-analysis-models.pdf (accessed on 16 December 2021).
- Salmon, P.M.; Read, G.J.; Walker, G.H.; Stevens, N.J.; Hulme, A.; McLean, S.; Stanton, N.A. Methodological issues in systems Human Factors and Ergonomics: Perspectives on the research–practice gap, reliability and validity, and prediction. Hum. Factors Ergon. Manuf. Serv. Ind. 2020, 32, 6–19. [Google Scholar] [CrossRef]
- Constantino, F.; Di Gravio, G.; Falegnami, A.; Patriarca, R.; Tronci, M.; De Nicola, A.; Vicoli, G.; Villani, M.L. Crowd sensitive indicators for proactive safety management: A theoretical framework. In Proceedings of the 30th European Safety and Reliability Conference ESREL and 15th Probabilistic Safety Assessment and Management Conference; PSAM 15 2020. Research Publishing Services: Singapore, 2020; pp. 1453–1458. [Google Scholar] [CrossRef]
- Farooqi, A.; Ryan, B.; Cobb, S. Using expert perspectives to explore factors affecting choice of methods in safety analysis. Saf. Sci. 2022, 146, 105571. [Google Scholar] [CrossRef]
- Maurer, M.; Gerdes, J.C.; Lenz, B.; Winner, H. Autonomous Driving; Springer: Berlin/Heidelberg, Germany, 2016; Volume 10, pp. 978–983. [Google Scholar]
- Hollnagel, E. Synesis: The Unification of Productivity, Quality, Safety and Reliability; Routledge: Milton Park, UK, 2020. [Google Scholar]
- Patriarca, R.; Del Pinto, G.; Di Gravio, G.; Constantino, F. FRAM for systemic accident analysis: A matrix representation of functional resonance. Int. J. Reliab. Qual. Saf. Eng. 2018, 25, 1850001. [Google Scholar]




| Quantitative Term | Qualitative Term | Verification Strategies |
|---|---|---|
| Internal validity | Credibility | Prolonged engagement in field; Use of peer debriefing; Triangulation; Member checks; Time sampling; Persistent observation; Clarifying researcher bias |
| External validity | Transferability | Provide a thick description; Purposive sampling |
| Reliability | Dependability | Create an audit trail; Code-recode strategy; Triangulation; Peer examination; Stepwise replication |
| Objectivity | Confirmability | Triangulation; Practice reflexivity |
| Phenotype | Characteristic | Definition |
|---|---|---|
| Timing | Too early | If the driver already countersteers although the vehicle is driving in the middle of the lane. |
| On time | If the driver countersteers in time (the vehicle is approaching the left or right of the lane boundary) to keep the vehicle in the lane. | |
| Too late | If the driver countersteers too late (vehicle has already left the lane) to keep the vehicle in the lane. | |
| Not at all | If the driver does not countersteer at all to keep the vehicle in the lane. | |
| Precision | Precise | If the car always drives perfectly along the centre line between the left or right of the lane boundary. |
| Acceptable | If the car always drives between the left or right of the lane boundary. | |
| Imprecise | If the car crosses the left or right of the lane boundary. |
| Weighting Factor | Numerical Score |
|---|---|
| ) | 4 |
| ) | 2 |
| ) | 2.5 |
| ) | 1 |
| ) | 1 |
| ) | 4 |
| ) | 2.5 |
| ) | 2.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grabbe, N.; Gales, A.; Höcher, M.; Bengler, K. Functional Resonance Analysis in an Overtaking Situation in Road Traffic: Comparing the Performance Variability Mechanisms between Human and Automation. Safety 2022, 8, 3. https://doi.org/10.3390/safety8010003
Grabbe N, Gales A, Höcher M, Bengler K. Functional Resonance Analysis in an Overtaking Situation in Road Traffic: Comparing the Performance Variability Mechanisms between Human and Automation. Safety. 2022; 8(1):3. https://doi.org/10.3390/safety8010003
Chicago/Turabian StyleGrabbe, Niklas, Alain Gales, Michael Höcher, and Klaus Bengler. 2022. "Functional Resonance Analysis in an Overtaking Situation in Road Traffic: Comparing the Performance Variability Mechanisms between Human and Automation" Safety 8, no. 1: 3. https://doi.org/10.3390/safety8010003
APA StyleGrabbe, N., Gales, A., Höcher, M., & Bengler, K. (2022). Functional Resonance Analysis in an Overtaking Situation in Road Traffic: Comparing the Performance Variability Mechanisms between Human and Automation. Safety, 8(1), 3. https://doi.org/10.3390/safety8010003