
Applications of LiDAR in Agriculture and Future Research Directions



Abstract
1. Introduction
- The applications of LiDAR data in agriculture of the last 14 years (2008 to 2022) are discussed. We believe that this can help readers, especially newcomers to this area, understand the trend of the application of LiDAR in the agricultural sector;
- Comparisons of aspects of LiDAR data in different agricultural applications along with various data processing aspects are also provided;
- A discussion on future research directions of LiDAR-based system are also presented.
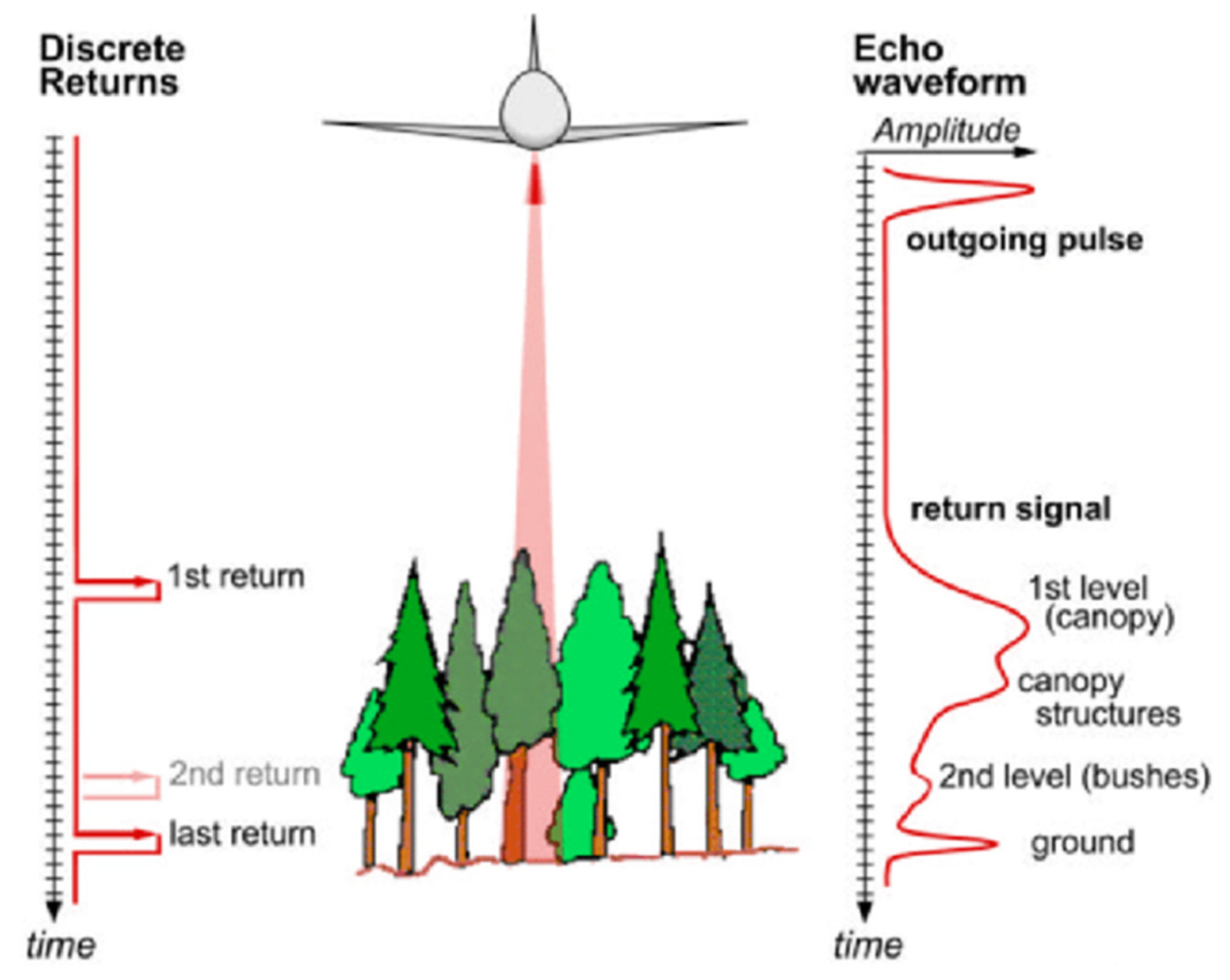
2. How LiDAR Works
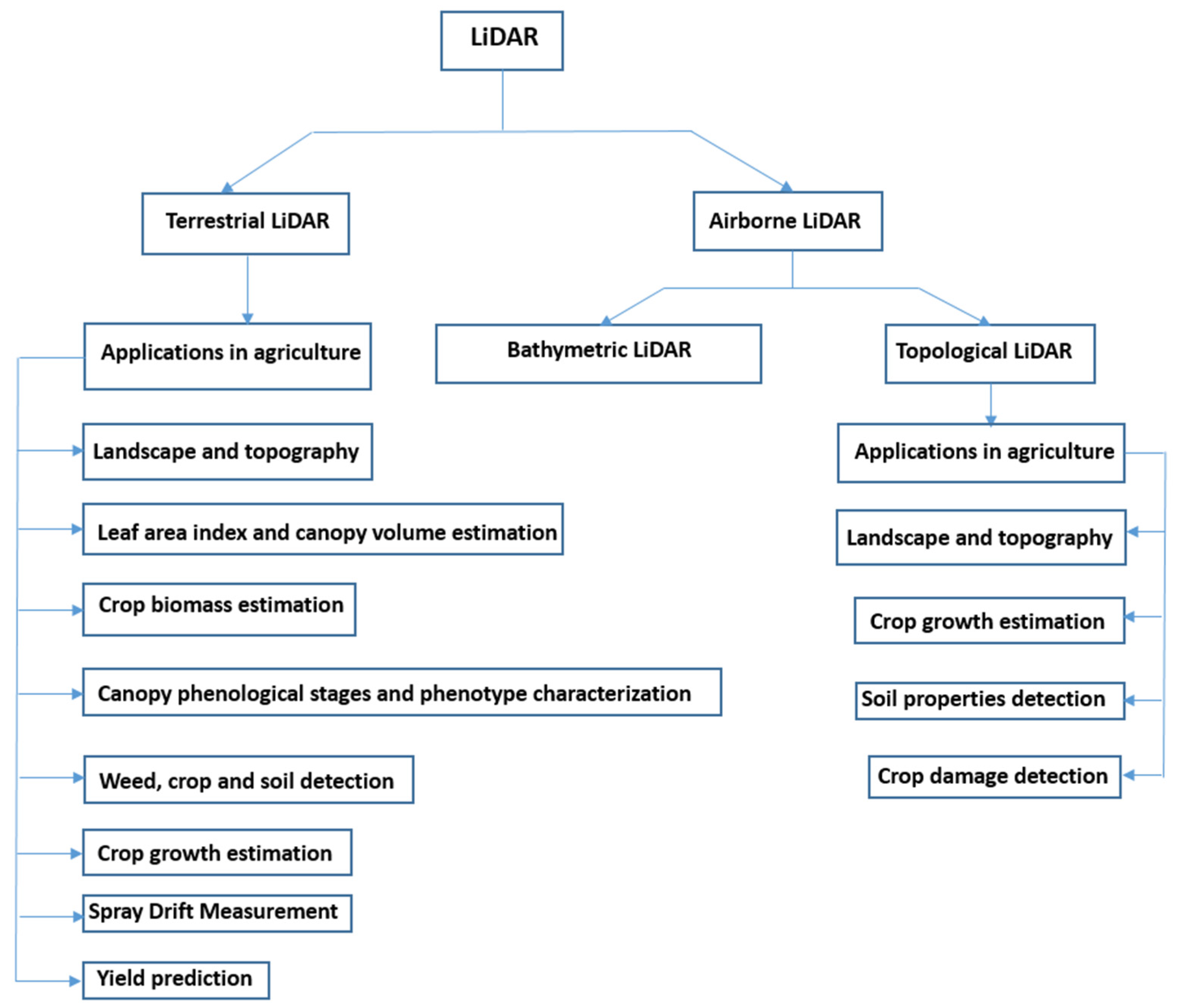
2.1. Types of LiDAR
3. Applications of LiDAR
3.1. Landscape and Topography
3.1.1. Ditch Network Detection
3.1.2. Terrace Group Detection
3.1.3. Erosion Detection
3.1.4. Overland Flow Detection
3.1.5. Parcel Detection
3.1.6. Canopy Openness Detection
3.2. Leaf Area Index and Canopy Volume
3.3. Crop Biomass Estimation
3.4. Canopy Phenological Stages and Phenotype Characterisation
3.5. Weed, Crop and Soil Detection and Crop Growth Estimation
3.5.1. Weed, Crop and Soil Discrimination
3.5.2. Crop Growth Estimation
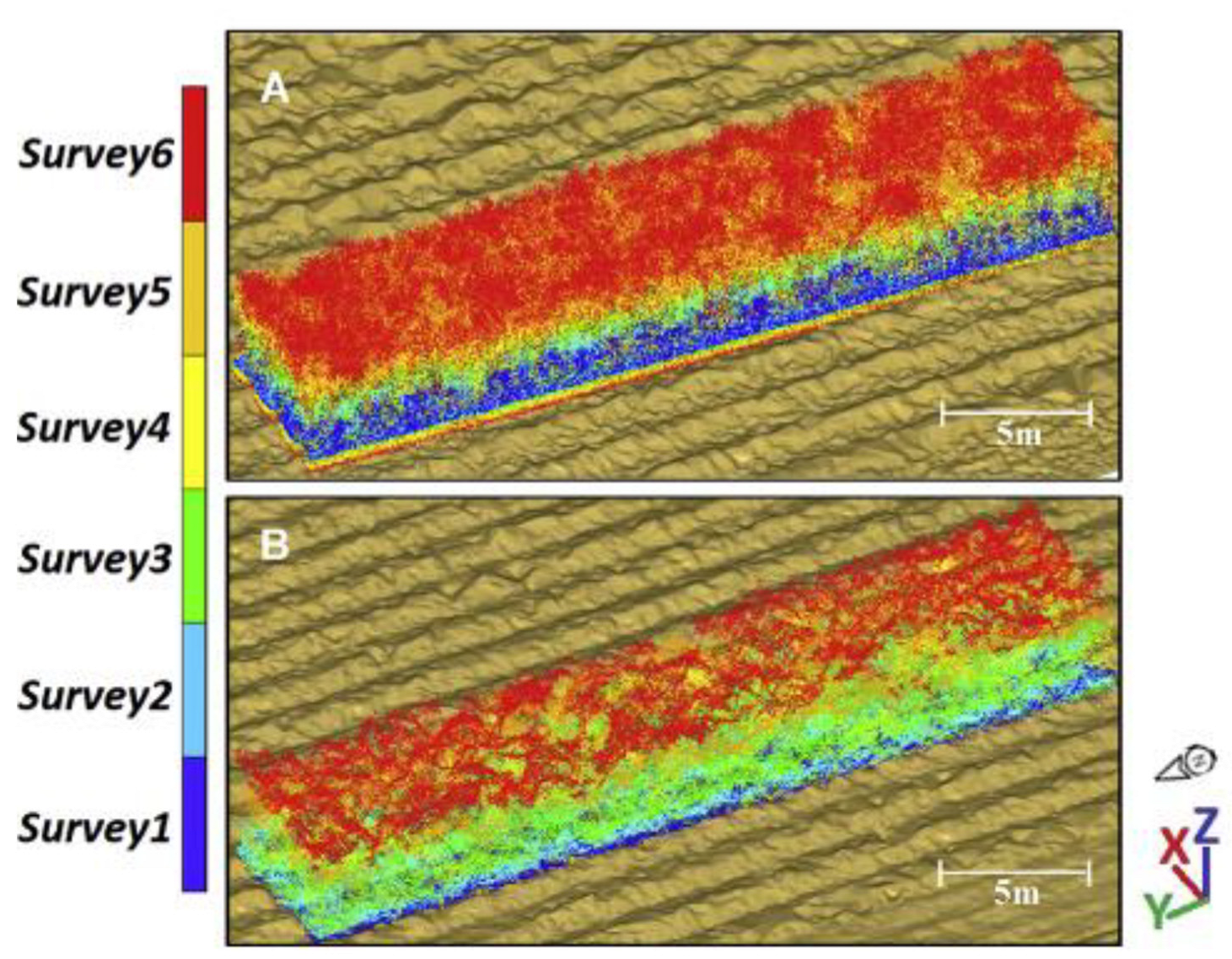
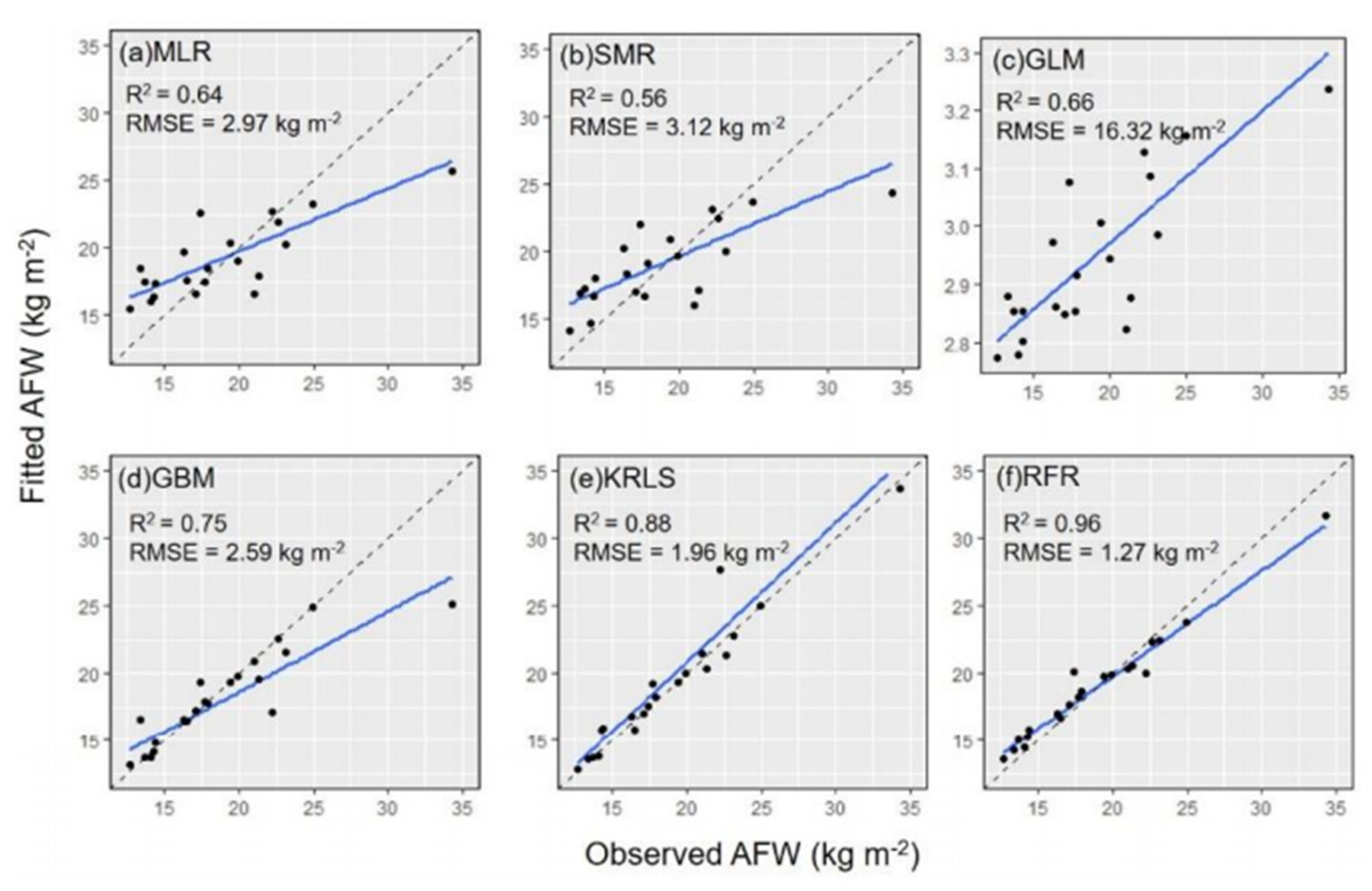
3.5.3. Aboveground Fresh Weight Estimation
3.6. Spray Drift Measurement
3.6.1. Spray Deposition Prediction
3.6.2. Different Aerosol Detection
3.7. Soil Property Detection
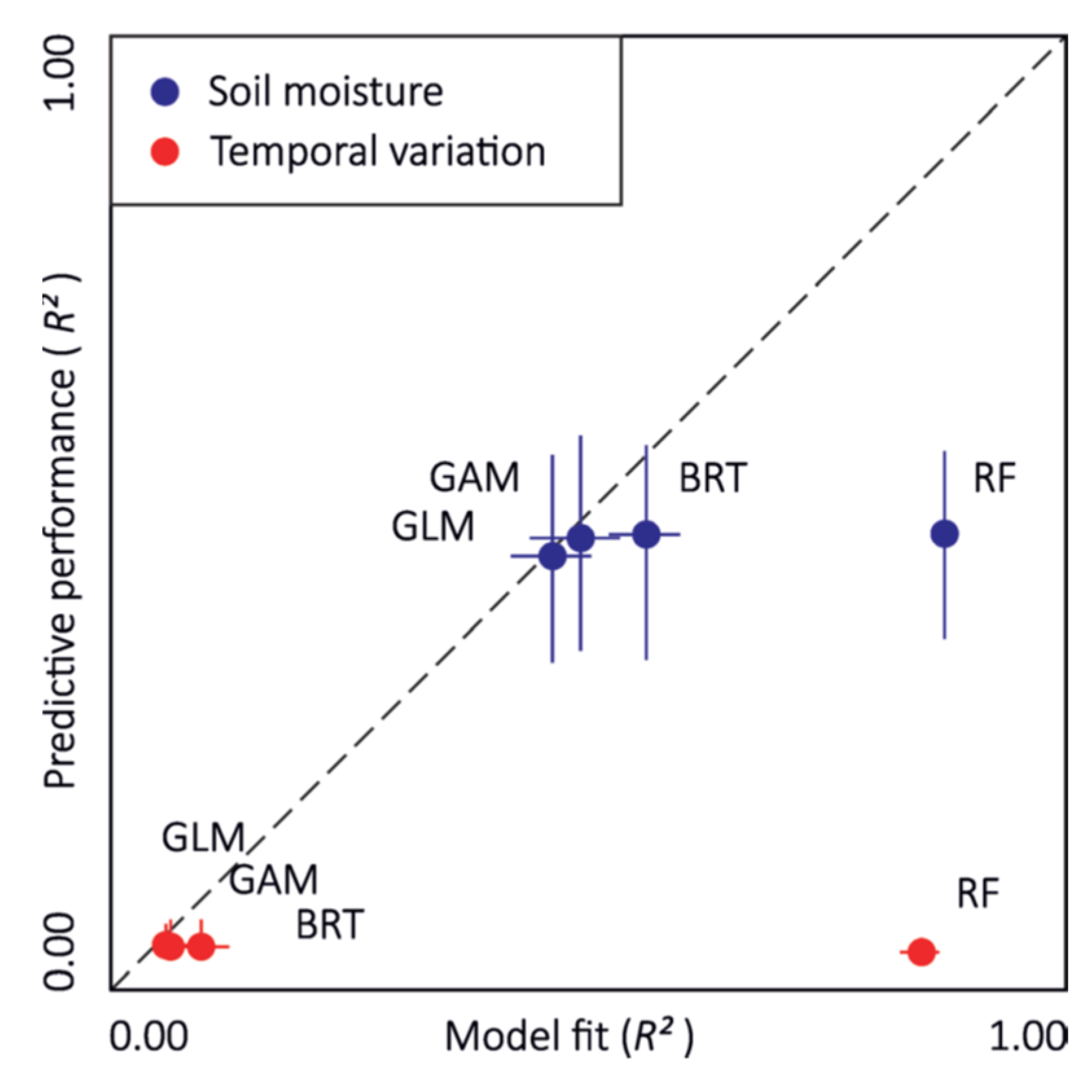
3.7.1. Soil Moisture Prediction
3.7.2. Soil Roughness Prediction
3.8. Yield Prediction
3.9. Crop Damage Detection
4. Data Processing
4.1. Pre-Processing of LiDAR Data
4.2. Recommended Value of the Spatial Resolution (Points/m2)
5. Future Research Directions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Terrestrial Laser Scanning. GIM International. Available online: https://www.gim-international.com/content/article/terrestrial-laser-scanning-2 (accessed on 5 January 2023).
- Li, S.; Dai, L.; Wang, H.; Wang, Y.; He, Z.; Lin, S. Estimating Leaf Area Density of Individual Trees Using the Point Cloud Segmentation of Terrestrial LiDAR Data and a Voxel-Based Model. Remote Sens. 2017, 9, 1202. [Google Scholar] [CrossRef]
- Lin, Y. LiDAR: An important tool for next-generation phenotyping technology of high potential for plant phenomics? Comput. Electron. Agric. 2015, 119, 61–73. [Google Scholar] [CrossRef]
- Bathymetric Lidar. Available online: https://www.hydro-international.com/themes/bathymetric-lidar (accessed on 5 January 2023).
- Thompson, J. 100 Real-World Applications of LiDAR Technology. Level Five Supplies. Available online: https://levelfivesupplies.com/100-real-world-applications-of-lidar-technology (accessed on 5 January 2023).
- EPA. Hand-Held Sensor for Carbon Dioxide. Bridger Photonics. Available online: https://www.epa.gov/sites/production/files/2015-06/documents/bridgerphotonics.pdf. (accessed on 5 January 2023).
- NASA Science. First Flights for CO2-Detecting Lidar. Available online: https://science.nasa.gov/technology/technology-highlights/first-flights-co2-detecting-lidar (accessed on 5 January 2023).
- Fiorani, L.; Santoro, S.; Parracino, S.; Maio, G.; Nuvoli, M.; Aiuppa, A. Early detection of volcanic hazard by lidar measurement of carbon dioxide. Nat. Hazards. 2016, 83, 21–29. [Google Scholar] [CrossRef]
- Ferraz, A.; Bretar, F.; Jacquemoud, S.; Gonçalves, G.R. The Role of Lidar Systems in Fuel Mapping; INESC: Coimbra, Portugal, 2009; ISSN 16452631. [Google Scholar]
- Tarolli, P.; Sofia, G.; Calligaro, S.; Prosdocimi, M.; Preti, F.; Fontana, G.D. Vineyards in Terraced Landscapes: New Opportunities from Lidar Data. Land Degrad. Dev. 2015, 26, 92–102. [Google Scholar] [CrossRef]
- Calveras, J.L.; Gil, E.; Casamada, J.L.; Escolà, A. Ultrasonic and LIDAR Sensors for Electronic Canopy Characterization in Vineyards: Advances to Improve Pesticide Application Methods. Sensors 2011, 11, 2177–2194. [Google Scholar]
- Arnó, J.; Escolà, A.; Vallès, J.M.; Llorens, J.; Sanz, R.; Masip, J.; Palacín, J.; Rosell-Polo, J.R. Leaf area index estimation in vineyards using a ground-based LiDAR scanner. Precis. Agric. 2013, 14, 290–306. [Google Scholar] [CrossRef]
- Walklate, P.J.; Cross, J.V.; Richardson, G.M.; Murray, R.A.; Baker, D.E. IT—Information Technology and the Human Interface: Comparison of Different Spray Volume Deposition Models Using LIDAR Measurements of Apple Orchards. Biosyst. Eng. 2002, 82, 253–267. [Google Scholar] [CrossRef]
- Jin, S.; Su, Y.; Song, S.; Xu, K.; Hu, T.; Yang, Q.; Wu, F.; Xu, G.; Ma, Q.; Guan, H.; et al. Non-destructive estimation of field maize biomass using terrestrial lidar: An evaluation from plot level to individual leaf level. Plant Methods 2020, 16, 69–88. [Google Scholar] [CrossRef]
- Colaço, A.F.; Molin, J.P.; Rosell-Polo, J.R.; Escolà, A. Application of light detection and ranging and ultrasonic sensors to high-throughput phenotyping and precision horticulture: Current status and challenges. Hortic.Res. 2018, 5, 763–784. [Google Scholar] [CrossRef]
- Rinaldi, M.; Calveras, J.L.; Gil, E. Electronic characterisation of the phenological stages of grapevine using a LIDAR sensor. In Proceedings of the 9th European Conference on Precision Agriculture (ECPA 2013), Lleida, Spain, 7–11 July 2013. [Google Scholar]
- Su, Y.; Wu, F.; Ao, Z.; Jin, S.; Qin, F.; Liu, B.; Pang, S.; Liu, L.; Guo, Q. Evaluating maize phenotype dynamics under drought stress using terrestrial lidar. Plant Methods. 2019, 15, 11. [Google Scholar] [CrossRef]
- Rosell, J.; Calveras, J.L.; Sanz, R.; Arnó, J.; Ribes-Dasi, M.; Masip, J.; Escolà, A.; Camp, F.; Solanelles, F.; Gràcia, F.; et al. Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LIDAR scanning. Agric. For. Meteorol. 2009, 149, 1505–1515. [Google Scholar] [CrossRef]
- Rosell-Polo, J.; Sanz, R.; Calveras, J.L.; Arnó, J.; Escolà, A.; Ribes-Dasi, M.; Masip, J.; Camp, F.; Gràcia, F.; Solanelles, F.; et al. A tractor-mounted scanning LIDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements. Biosyst. Eng. 2009, 102, 128–134. [Google Scholar] [CrossRef]
- Neon Science. The Basics of LiDAR—Light Detection and Ranging—Remote Sensing. Available online: https://www.neonscience.org/resources/learning-hub/tutorials/lidar-basics (accessed on 5 January 2023).
- National Oceanic and Atmospheric Administration. What Is Lidar? National Ocean Service. Available online: https://oceanservice.noaa.gov/facts/lidar.html (accessed on 5 January 2023).
- What Is LiDAR Technology and How Does It Work? Geospatial World. Available online: https://www.geospatialworld.net/blogs/what-is-lidar-technology-and-how-does-it-work/ (accessed on 2 August 2022).
- SemiNex Corporation. LIDAR. Available online: https://seminex.com/lidar/ (accessed on 5 January 2023).
- Geo.Matching. Bathymetric Lidar Sensors and UAVs. Available online: https://geo-matching.com/content/bathymetric-lidar-sensors-and-uavs (accessed on 5 January 2023).
- Lohani, B.; Ghosh, S. Airborne LiDAR Technology: A Review of Data Collection and Processing Systems. Phys. Sci. 2017, 87, 567–579. [Google Scholar] [CrossRef]
- 4 Types Of LiDAR Remote Sensing Explained. Available online: https://blog.topodot.com/4-types-of-lidar-remote-sensing-explained/ (accessed on 5 January 2023).
- What Is Lidar Data? ArcGIS. Available online: https://desktop.arcgis.com/en/arcmap/10.3/manage-data/las-dataset/what-is-lidar-data-.htm (accessed on 5 January 2023).
- Bailly, J.S.; Lagacherie, P.; Millier, C.; Puech, C.; Kosuth, P. Agrarian landscapes linear features detection from LiDAR: Application to artificial drainage networks. Int. J. Remote Sens. 2008, 29, 3489–3508. [Google Scholar] [CrossRef]
- McCoy, M.; Asner, G.; Graves, M. Airborne Lidar survey of irrigated agricultural landscapes: An application of the slope contrast method. J. Archaeol. Sci. 2011, 38, 2141–2154. [Google Scholar] [CrossRef]
- Galzki, J.; Birr, A.; Mulla, D. Identifying critical agricultural areas with three-meter LiDAR elevation data for precision conservation. J. Soil Water Conserv. 2011, 66, 423–430. [Google Scholar] [CrossRef]
- Mathews, A.; Jensen, J. An airborne LiDAR-based methodology for vineyard parcel detection and delineation. Int. J. Remote Sens. 2012, 33, 5251–5267. [Google Scholar] [CrossRef]
- Bode, C.; Limm, M.; Power, M.; Finlay, J. Subcanopy Solar Radiation model: Predicting solar radiation across a heavily vegetated landscape using LiDAR and GIS solar radiation models. Remote Sens. Environ. 2014, 154, 387–397. [Google Scholar] [CrossRef]
- Arnó, J.; Del-Moral-Martínez, I.; Escolà, A.; Company, J.; Masip, J.; Sanz, R.; Rosell, J.; Casasnovas, J.A.M. Mapping the leaf area index in vineyard using a ground-based lidar scanner. In Proceedings of the 11th International Conference on Precision Agriculture (ICPA 2012), Indianapolis, IN, USA, 15–18 July 2012. [Google Scholar]
- Poblete-Echeverría, C.; Strever, A.E.; Barnard, Y.; Vivier, M. Proximal detection using robotics for vineyard monitoring: A concept. Acta. Hortic. 2020, 1279, 231–238. [Google Scholar] [CrossRef]
- Keightley, K.E.; Bawden, G.W. 3D volumetric modeling of grapevine biomass using Tripod LiDAR. Comput. Electron. Agric. 2010, 74, 305–312. [Google Scholar] [CrossRef]
- Eitel, J.; Magney, T.; Vierling, L.; Brown, T.; Huggins, D. LiDAR based biomass and crop nitrogen estimates for rapid, non-destructive assessment of wheat nitrogen status. Field Crops Res. 2014, 159, 21–32. [Google Scholar] [CrossRef]
- Walter, J.; Edwards, J.; Mcdonald, G.; Kuchel, H. Estimating biomass and canopy height with LiDAR for field crop breeding. Front. Plant Sci. 2019, 10, 1145–1161. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Li, C.; Paterson, A. In-field high-throughput phenotyping of cotton plant height using LiDAR. Remote Sens. 2017, 9, 377. [Google Scholar] [CrossRef]
- Thapa, S.; Zhu, F.; Walia, H.; Yu, H.; Ge, Y. A novel LiDAR-based instrument for high-throughput, 3D measurement of morphological traits in maize and sorghum. Sensors 2018, 18, 1187. [Google Scholar] [CrossRef]
- Andújar, D.; Rueda-Ayala, V.; Moreno, H.; Rosell-Polo, J.; Escolà, A.; Valero, C.; Gerhards, R.; Fernandez-Quintanilla, C.; Dorado, J.; Griepentrog, W.H. Discriminating crop, weeds and soil surface with a terrestrial LIDAR sensor. Sensors 2013, 13, 14662–14675. [Google Scholar] [CrossRef]
- Rama, N.; Reji, J.; Ramiya, A. Object-level classification of vegetable crops in 3D LiDAR point cloud using deep learning convolutional neural networks. Precis. Agric. 2021, 22, 1617–1633. [Google Scholar]
- Yuan, W.; Li, J.; Bhatta, M.; Shi, Y.; Baenziger, P.; Ge, Y. Wheat height estimation using LiDAR in comparison to ultrasonic sensor and UAS. Sensors 2018, 18, 3731. [Google Scholar] [CrossRef]
- Sofonia, J.; Shendryk, Y.; Phinn, S.; Roelfsema, C.; Kendoul, F.; Skocaj, D. Monitoring sugarcane growth response to varying nitrogen application rates: A comparison of UAV SLAM LiDAR and photogrammetry. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101878–101893. [Google Scholar] [CrossRef]
- Xu, J.X.; Ma, J.; Tang, Y.N.; Wu, W.X.; Shao, J.H.; Wanben, W.; Wei, S.Y.; Liu, Y.; Wang, Y.C.; Guo, H. Estimation of sugarcane yield using a machine learning approach based on UAV-LiDAR data. Remote Sens. 2020, 12, 2823. [Google Scholar] [CrossRef]
- Lopez, E.G.; Rocadenbosch, F.; Sanz, R.; Rosell-Polo, J. Eye-safe Lidar system for pesticide spray drift measurement. Sensors 2015, 15, 3650–3670. [Google Scholar]
- Gil, E.; Calveras, J.L.; Casamada, J.L.; Fabregas, X.; Gallart, M. Use of a terrestrial LIDAR sensor for drift detection in vineyard spraying. Sensors 2013, 13, 516–534. [Google Scholar] [CrossRef]
- Lopez, E.G.; Gené-Mola, J.; Sanz, R.; Rocadenbosch, F.; Chueca, P.; Arnó, J.; Solanelles, F.; Rosell-Polo, J. Polarization Lidar detection of agricultural aerosol emissions. J. Sens. 2018, 2018, 1864106. [Google Scholar]
- Southee, M.; Treitz, P.; Scott, N. Application of Lidar terrain surfaces for soil moisture modelling. Photogramm. Eng. Rem. S. 2012, 78, 1241–1251. [Google Scholar] [CrossRef]
- Kemppinen, J.; Niittynen, P.; Riihimäki, H.; Luoto, M. Modelling soil moisture in a high-latitude landscape using LiDAR and soil data. Earth Surf. Proc. Land. 2017, 43, 1019–1103. [Google Scholar] [CrossRef]
- Turner, R.; Panciera, R.; Tanase, M.; Lowell, K.; Hacker, J. Estimation of soil surface roughness in Australian agricultural soils using airborne LiDAR. Remote Sens. Environ. 2014, 140, 107–117. [Google Scholar] [CrossRef]
- Underwood, J.; Hung, C.; Whelan, B.; Sukkarieh, S. Mapping almond orchard canopy volume, flowers, fruit and yield using lidar and vision sensors. Comput. Electron. Agric. 2016, 130, 83–96. [Google Scholar] [CrossRef]
- Gené-Mola, J.; Lopez, E.G.; Cheein, F.A.; Dario, J.G.; Calveras, J.L.; Sanz, R.; Escolà, A.; Rosell-Polo, J. Fruit detection, yield prediction and canopy geometric characterisation using LiDAR with forced air flow. Comput. Electron. Agric. 2019, 168, 105121–105134. [Google Scholar] [CrossRef]
- Zhou, L.; Gu, X.; Cheng, S.; Guijun, Y.; Shu, M.; Sun, Q. Analysis of plant height changes of lodged maize using UAV-LiDAR data. Agriculture 2020, 10, 146. [Google Scholar] [CrossRef]
- Qi, X.; Fu, W.; An, P.; Wu, B.; Ma, J. Point Cloud Preprocessing on 3D LiDAR data for Unmanned Surface Vehicle in Marine Environment. In Proceedings of the 2020 IEEE International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA 2020), Chongqing, China, 6–8 November 2020; pp. 983–990. [Google Scholar]
- Bai, J.; Qin, D.; Ma, L.; Teklu, M. An Improved RANSAC Algorithm Based on Adaptive Threshold for Indoor Positioning. Mobile Inf. Syst. 2021, 2021, 2952977. [Google Scholar] [CrossRef]
- Canaz Sevgen, S. Airborne LIDAR data classification in complex urban area using random forest: A case study of Bergama, Turkey. Int. J. Eng. Geosci. 2019, 4, 45–51. [Google Scholar] [CrossRef]
- Canaz Sevgen, S.; Karsli, F. Automatic ground extraction for urban areas from airborne lidar data. Turk. J. Eng. 2020, 4, 113–122. [Google Scholar] [CrossRef]
- Özdemir, S.; Akbulut, Z.; Karslı, F.; Acar, H. Automatic extraction of trees by using multiple return properties of the lidar point cloud. Int. J. Eng. Geosci. 2021, 6, 20–26. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining (KDD 1996), Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Çetin, Z.; Yastıklı, N. Automatic Detection of Single Street Trees from Airborne LiDAR Data Based on Point Segmentation Methods. Int. J. Eng. Geosci. 2022, 8, 129–137. [Google Scholar] [CrossRef]
- Susaki, J. Adaptive slope filtering of airborne LiDAR data in urban areas for digital terrain model (DTM) generation. Remote Sens. 2012, 4, 1804–1819. [Google Scholar] [CrossRef]
- Li, Y.; Yong, B.; Wu, H.; An, R.; Xu, H. An Improved Top-Hat Filter with Sloped Brim for Extracting Ground Points from Airborne Lidar Point Clouds. Remote Sens. 2014, 6, 12885–12908. [Google Scholar] [CrossRef]
- Su, W.; Sun, Z.; Zhong, R.; Huang, J.; Li, M.; Zhu, J.; Zhang, K.; Wu, H.; Zhu, D. A New Hierarchical Moving Curve-Fitting Algorithm for Filtering Lidar Data for Automatic DTM Generation. Int. J. Remote Sens. 2015, 36, 3616–3635. [Google Scholar] [CrossRef]
- Serifoglu Yilmaz, C.; Yilmaz, V.; Güngör, O. Investigating the Performances of Commercial and Non-Commercial Software for Ground Filtering of UAV-Based Point Clouds. Int. J. Remote Sens. 2018, 39, 5016–5042. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Han, X.-F.; Jin, J.S.; Wang, M.-J.; Jiang, W.; Gao, L.; Xiao, L. A Review of Algorithms for Filtering the 3D Point Cloud. Signal Process. Image Commun. 2017, 57, 103–112. [Google Scholar] [CrossRef]
- Sanchez-Diaz, B.; Mata-Zayas, E.E.; Gama-Campillo, L.M.; Rincon-Ramirez, J.A.; Vidal-Garcia, F.; Rullan-Silva, C.D.; Sanchez-Gutierrez, F. LiDAR modeling to determine the height of shade canopy tree in cocoa agrosystems as available habitat for wildlife. Int. J. Eng. Geosci. 2022, 7, 283–293. [Google Scholar] [CrossRef]
- González-Ferreiro, E.; Diéguez-Aranda, U.; Barreiro-Fernández, L.; Buján, S.; Barbosa, M.; Suárez, J.C.; Bye, I.J.; Miranda, D. A Mixed Pixel- and Region-Based Approach for Using Airborne Laser Scanning Data for Individual Tree Crown Delineation in Pinus Radiata D. Don Plantations. Int. J. Remote Sens. 2013, 34, 7671–7690. [Google Scholar] [CrossRef]
- Buján, S.; González-Ferreiro, E.; Barreiro-Fernández, L.; Santé, I.; Corbelle, E.; Miranda, D. Classification of Rural Landscapes from Low-Density Lidar Data: Is It Theoretically Possible? Int. J. Remote Sens. 2013, 34, 5666–5689. [Google Scholar] [CrossRef]
- Zhu, L.; Mu, Y.; Shi, R. Study on the Resolution of Laser Scanning Point Cloud. In Proceedings of the 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008. [Google Scholar]
- Luo, S.; Chen, J.; Wang, C.; Xiaohuan, X.; Zeng, H.; Peng, D.; Li, D. Effects of LiDAR point density, sampling size and height threshold on estimation accuracy of crop biophysical parameters. Opt. Express. 2016, 24, 11578–11594. [Google Scholar] [CrossRef] [PubMed]
- FMCW LiDAR on Chip. SiLC. Available online: https://www.silc.com/technology/ (accessed on 5 January 2023).
- Sony to Release a Stacked SPAD Depth Sensor for Automotive LiDAR Applications, an Industry First Contributing to the Safety and Security of Future Mobility with Enhanced Detection and Recognition Capabilities for Automotive LiDAR Applications. Available online: https://www.sony-semicon.com/en/news/2021/2021090601.html (accessed on 5 January 2023).
- Atalar, O.; Van Laer, R.; Safavi-Naeini, A.H.; Arbabian, A. Longitudinal piezoelectric resonant photoelastic modulator for efficient intensity modulation at megahertz frequencies. Nat. Commun. 2022, 13, 1526. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LiDAR Type | Algorithm | Model | Classification Method | Features | Results |
|---|---|---|---|---|---|
| Airborne | DWT; watershed algorithm | Classification and regression trees | Elevation profiles; concavity indicators | For DWT and watershed, overall accuracy: ~71%. Mean ditch omission rate: ~50%. Mean ditch commission rate: ~15 % [28]. | |
| Airborne | SCM | DEM; GIS | Quantile classification | Top of canopy height; ground height; flat to low slope area | LiDAR data based SCM estimated less than the GIS model [29]. |
| Airborne | DEM | Slope; flow accumulation; stream power index | 3 m LiDAR identified a higher number of most prominent gullies compared to 30 m LiDAR [30]. | ||
| Airborne | Fusion’s ground filter algorithm | DTM; DSM; nDSM | Focal statistics function; iterative self-organising data analysis technique | Vine rows height; relative elevation of surface features from ground level | Mean accuracy of correctly classified vineyard area: 97.55%. Mean accuracy of parcel delineation: 88.79% [31]. |
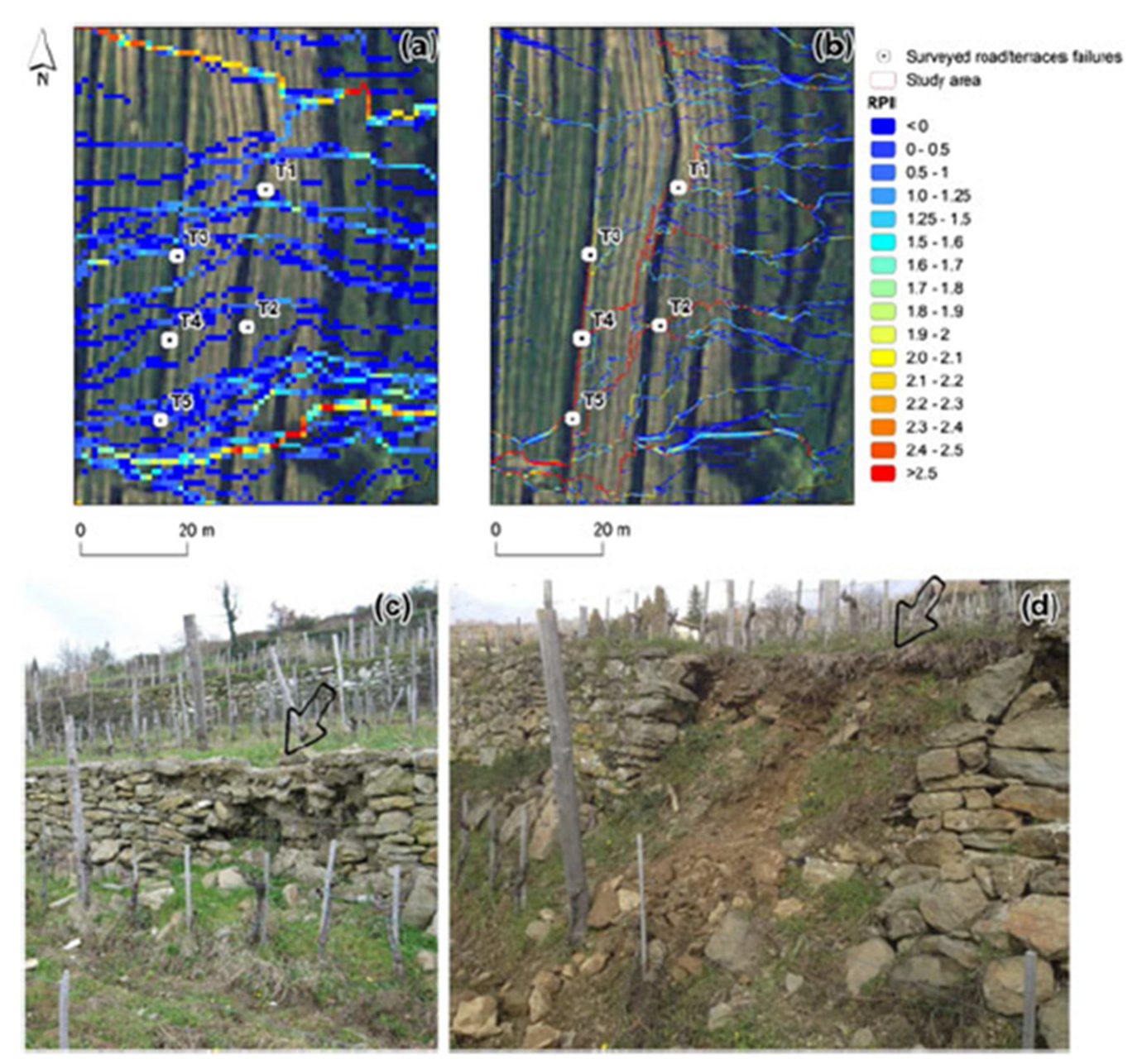
| Airborne Terrestrial | DTM | Relative path impact index (RPII) | The RPII obtained from 0.2 m TLS DTM presented more accurate results compared to RPII obtained from 1 m ALS DTM [10]. | ||
| Airborne | DEM; SSR; GRASS; GIS r.sun; SLR | Linke turbidity index; Julian day; time-step; LPI | R2 between SSR and field measurement for total solar radiation: 0.92. R2 between GLA and field measurement for total solar radiation: 0.692. R2 between LPI and canopy openness obtained from GLA: 0.768 [32]. |
| LiDAR Type | Analytical Method | Classification Algorithm | Features | Results |
|---|---|---|---|---|
| Terrestrial | SLR | TAI; LAI | R2 between plant volume and LAI: 0.8422 (pear tree), 0.814 (apple tree) and 0.8058 (vineyards). R2 between TAI and LAI: 0.9194 (vineyards). TAI could be used as a parameter to determine LAI for some specific crops in a vineyard [19]. | |
| Terrestrial | Lillefors tests; Box–Cox test; Pearson’s product- moment correlation coefficient | Canopy height; crop width; canopy volume; LAI | R2 between LAI and canopy volume using ultrasonic: 0.51; between LAI and canopy volume using LiDAR: 0.21; R2 of canopy volume obtained from LiDAR and ultrasonic sensors: 0.56 [11]. | |
| Terrestrial | Vector map; raster map | Fuzzy c-means | LAI | The LiDAR system could be used intermittently if the maximum distance between scans along the rows did not exceed 15 m with a scan length of 1 m [33]. |
| Terrestrial | Poisson distribution; SLR | LAI; TAI; tree height; cross- sectional area; canopy volume | R2 between TAI and LAI: 0.92; between canopy volume and LAI: 0.81; between cross-sectional area and LAI: 0.72; between tree height and LAI: 0.62 [12]. | |
| Terrestrial | SLR | MSA; LAI | R2 between MSA and LAI: 0.798 [34]. |
| LiDAR Type | Analytical Method | Model | Features | Results |
|---|---|---|---|---|
| Terrestrial | SLR; PMCC | 3D volumetric model | The volume of woody tissue of vines | Volumes calculated from LiDAR data range between 1.31 and 10.61 L. Volumes obtained from analogue measurement range between 0.83 and 5.05 L. The SLR of analogue volume on LiDAR-based volume indicates that slope values range from 0.43 to 0.54. Furthermore, the PMCC ranges between 0.73 and 0.97 [35]. |
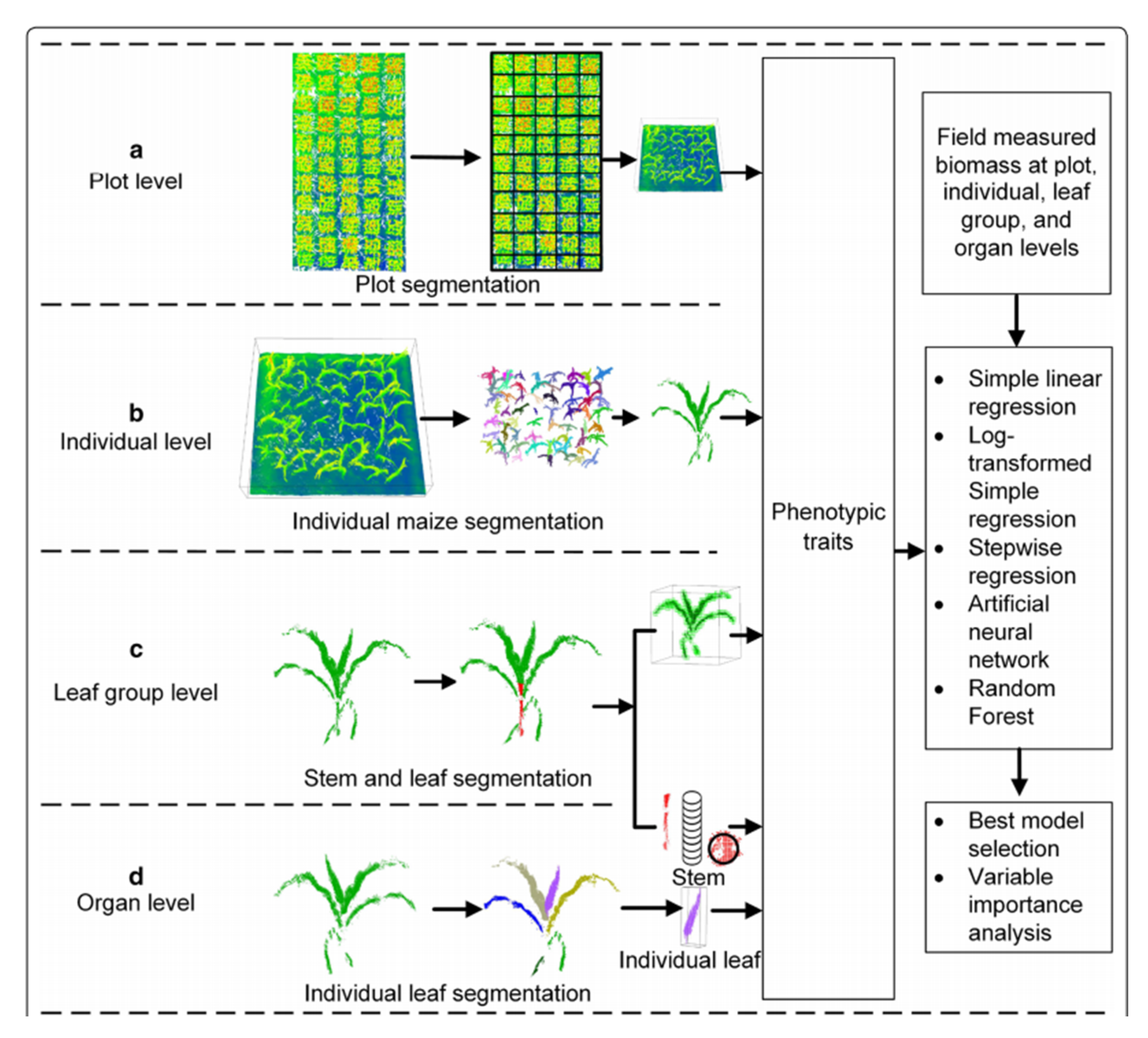
| Terrestrial | SLR; LSR; SMR; ANN; RFR | Height; canopy cover; canopy volume | At the plot level: LSR and SLR had R2 of 0.79 and 0.80, respectively. The R2 of SMR, ANN and RF were 0.80, 0.68 and 0.79, respectively. At the individual plant level: LSR and SLR had R2 of 0.93 and 0.96, respectively. The R2 of SMR, ANN and RF were 0.94, 0.93 and 0.94, respectively. In the leaf group level: LSR and SLR had R2 of 0.95 and 0.92, respectively. The R2 of SMR, ANN and RF were 0.97, 0.97 and 0.97, respectively. At the stem level: LSR and SLR had R2 of 0.93 and 0.94, respectively. The R2 and RMSE of SMR, ANN and RF were 0.94, 0.95 and 0.95, respectively [14]. | |
| Terrestrial | SLR | DSM; DTM | Vegetation volume; NNI; canopy height; canopy volume | Relationships between observed physical proxies and LiDAR-derived vegetation volume for all seasons and growth stages were with R2 >= 0.72. The range of relationships between the actual nitrogen concentration and green laser return intensity was R2 = 0.10–0.75 [36]. |
| Terrestrial | Percentile algorithm; Pearson’s correlation coefficient (r); SLR | AGB; CH; LPV; LCH | The correlations between AGB and LPV were up to r = 0.86. The correlations between CH and LCH were up to r = 0.94 [37]. |
| LiDAR Type | Analytical Method | Model | Features | Results |
|---|---|---|---|---|
| Terrestrial | SLR | GRASS-GIS | Canopy height; canopy width; LAI; TRV; LWA | R2 between manual and LiDAR scan of canopy height, between manual and LiDAR scan of canopy width, between TRV and the growth stage and between LWA and the growth stage were 0.98, 0.81, 0.99 and 0.95, respectively [16]. |
| Terrestrial | SLR; distance-based clustering | DTM | Plant height; PAI; PLA; plant area density (PAD) | R2 between plant height and manual measurement, between PLA and manual measurement and between PAI and manual measurement were 0.96, 0.92 and 0.70, respectively [17]. |
| Terrestrial | SLR; ANOVA test analysis | Plant volume; canopy height; PCA | R2 between manual and LiDAR measurements of canopy height, between manual and LiDAR measurements of PCA, between manual and LiDAR measurements of canopy volume were 0.97, 0.97 and 0.98, respectively [38]. | |
| Terrestrial | SLR | Delaunay triangulation algorithm; K-means clustering; LOWESS | Leaf area; plant area; the inclination angle of individual leaves; leaf angular distribution of the whole plant | R2 between model-derived leaf area and the reference measurement for maize was 0.92. For sorghum, R2 between model-derived leaf area and the reference measurement was 0.94. For maize, R2 between leaf inclination angles measured from 2D images and those obtained from the 3D model was 0.904. For sorghum, R2 between leaf inclination angles measured from 2D images and those obtained from the 3D model was 0.723 [37]. |
| LiDAR Type | Analytical Method | Model | Features | Results |
|---|---|---|---|---|
| Terrestrial | SLR; binary logistic regression; CDA | Plant height; reflection value | R2 between LiDAR measured height and actual plant heights was 0.75. The predicted values from binary logistic regression shows an accuracy of 95.3% for vegetation and 82.2% for non-vegetation/soil, with an overall accuracy of 92.7%. Using canonical discriminant analysis (CDA), the overall success to discriminate was 72.2%. The soil and dicots were classified with 92.4% and 64.5% accuracy, respectively [40]. | |
| Terrestrial | CropPointNet; PointNet; DGCNN | Crop height | CropPointNet model had an overall accuracy of 81.5%. PointNet and DGCNN had overall accuracies of 55% and 66.5%, respectively. CropPointNet, DGCNN and PointNet models discriminated cabbage with 91%, 82% and 72% accuracy, respectively, eggplant with 88%, 83% and 69% accuracy, respectively, and tomato crop with 65%, 61% and 60% accuracy, respectively [41]. | |
| Terrestrial | SLR | Canopy height | R2 between LiDAR measured height and manual measurement, between UAS measured height and manual measurement and between ultrasonic-sensor-measured height and manual measurement were 0.97, 0.91 and 0.05, respectively [42]. | |
| Airborne | Power regression; SLR | DTM | Sugarcane height | The ratio of ground to non-ground returns with LiDAR had R2 = 0.971. The ratio of ground to non-ground returns with photogrammetry had R2 = 0.993. R2 between maximum crop height obtained from LiDAR and those obtained from photogrammetry was 0.885. R2 between the mean crop height obtained from LiDAR and those obtained from photogrammetry was 0.929 [43]. |
| Airborne | MLR; SMR; GLM; GBM; KRLS; RFR | DEM; DSM | AFW | R2 between observed AFW and fitted AFW via RFR was 0.96, the highest value for R2 among the six models [44]. |
| LiDAR Type | Analytical Method | Features | Results |
|---|---|---|---|
| Terrestrial | Signal to noise ratio simulations | LiDAR signal backscatters signal to noise ratio | LiDAR system measured mid-range spray drift with distance 2.4 m and temporal (100 ms at maximum pulse repetition frequency) resolution [45]. |
| Terrestrial | Linear function | Number of drift drops | For 34,959 m3.h−1 air flow rate: The correlation coefficient ranged from 0.87 to 0.91 with conventional nozzle types. The correlation coefficient ranged from 0.88 to 0.40 with air injection nozzle types. For 27,507 m3.h−1 air flow rate: The correlation coefficient ranged from 0.85 to 0.94 with conventional nozzle types. The correlation coefficient ranged from 0.07 to 0.88 with air injection nozzle types. For 6423 m3.h−1 air flow rate: The correlation coefficient ranged from 0.93 to 0.98 with conventional nozzle types [46]. |
| Terrestrial (polarisation) | Polarisation LiDAR methodology | Volume depolarisation ratio; particle depolarisation ratio | The results show that particle depolarisation ratios due to field dust (0.220–0.268) and road dust (0.385) were higher than those caused by pesticide spray drift (0.028–0.043) or diesel exhaust (0.099) [47]. |
| LiDAR Type | Analytical Method | Model/ Algorithm | Features | Results |
|---|---|---|---|---|
| Airborne | Shapiro–Wilk test; Brown– Forsythe test; repeated measures analysis of variance; SLR | Depression removal algorithms; DSM; DEM; impact reduction approach algorithm | TWI; PEI CHM | R2 between soil moisture and TWI for 0–15 cm depth was 0.346. R2 between soil moisture and TWI for 0–40 cm depth was 0.292. High-spatial-resolution variables (2 m and 5 m) might be more effective in modelling soil moisture trends at shallow depths (0 to 15 cm). Coarser resolutions (10 m and 20 m) might be more suitable at greater depths (0 to 40 cm) [48]. |
| Airborne | SLR | Surface heights; root mean square (RMS) | Correlation between LiDAR estimated and ground-measured (RMS) estimated had R2 > 0.68, up to 0.88 [50]. | |
| Airborne | GLM; GAM; BRT; RFR | Soil moisture model; temporal variation model; DTM | TWI; system for automated geoscientific analyses; soil wetness index; topographic position index | The average model fit of the soil moisture model had R2 = 0.60. The temporal variation model had a fit of R2 = 0.25 [49]. |
| LiDAR Type | Analytical Method | Model/ Algorithm | Features | Results |
|---|---|---|---|---|
| Terrestrial | SLR | 3D point cloud segmentation and voxelization | Canopy volume; flower density; fruit density | LiDAR canopy volume had a relationship to yield with an R2 of 0.77. Hand-held photography and image processing to measure fruit density presented an R2 of 0.71 [51]. |
| Terrestrial | SLR | SVM; RF; density-based scan algorithm | Mean canopy height; canopy width; contour cross-section area | LiDAR with forced airflow system and the actual number of apples per tree had RMSEs of 19.0% and 12.4 % and R2 of 0.58 and 0.54 when scanning from east and west sides, respectively. LiDAR with forced airflow system and the actual number of apples per tree presented R2 of 0.87 when using data from both tree sides [52]. |
| No Lodging | With Lodging | ||
|---|---|---|---|
| Stem Tilt | Stem Folding | Root Lodging | |
| 2.01~2.28 m | 1.21~1.47 m | 0.06~0.17 m | 0.08~0.18 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Debnath, S.; Paul, M.; Debnath, T. Applications of LiDAR in Agriculture and Future Research Directions. J. Imaging 2023, 9, 57. https://doi.org/10.3390/jimaging9030057
Debnath S, Paul M, Debnath T. Applications of LiDAR in Agriculture and Future Research Directions. Journal of Imaging. 2023; 9(3):57. https://doi.org/10.3390/jimaging9030057
Chicago/Turabian StyleDebnath, Sourabhi, Manoranjan Paul, and Tanmoy Debnath. 2023. "Applications of LiDAR in Agriculture and Future Research Directions" Journal of Imaging 9, no. 3: 57. https://doi.org/10.3390/jimaging9030057
APA StyleDebnath, S., Paul, M., & Debnath, T. (2023). Applications of LiDAR in Agriculture and Future Research Directions. Journal of Imaging, 9(3), 57. https://doi.org/10.3390/jimaging9030057