
Small Satellite Tools for High-Resolution Infrared Fire Monitoring

 ,
,
Abstract
:1. Introduction
2. FireBIRD Primary Mission Requirements
- Establishment of a pre-operational fire monitoring constellation consisting of TET-1 and BIROS;
- Installation and testing of different operational modes for continuous monitoring of selected regions;
- Testing of different overflight formations and maneuvers to demonstrate the agility of the satellites;
- Survey of vegetation fires, peat fires, and coal seam fires and derivation of important climate-related variables of these fires, in particular the three parameters of the Essential Climate Variable (ECV) “Fire Disturbance”:
- o
- precise geographic localization of “Active Fires” fires
- o
- estimation of the upwelling radiant power of the fire, i.e., estimation of the “Fire Radiative Power” (FRP); and
- o
- fire-area mapping parameters, e.g., the “Burned Area”—for daytime data takes, as well as deriving other fire attributes, such as the strength and length of forest and bush fire fronts (“fire line strength and length”), and further:
- Observation and assessment of volcanic and geo-thermal activities, especially for:
- o
- monitoring of selected active volcanoes;
- o
- detection of thermal precursors of eruptions;
- o
- monitoring and thermal mapping of volcanic eruptions; and
- o
- mapping and detection of thermal changes in geo-thermal active areas.
- Validation, i.e., critical evaluation of accuracy:
- o
- of fire attributes, such as the FRP, effective fire area, effective fire temperature, and others in the spatial mapping of the detected HTE; and
- o
- by cross validation of fire emission data, especially those from spatially coarser resolution satellite sensors, which detect large fires at shorter time intervals than FireBIRD.
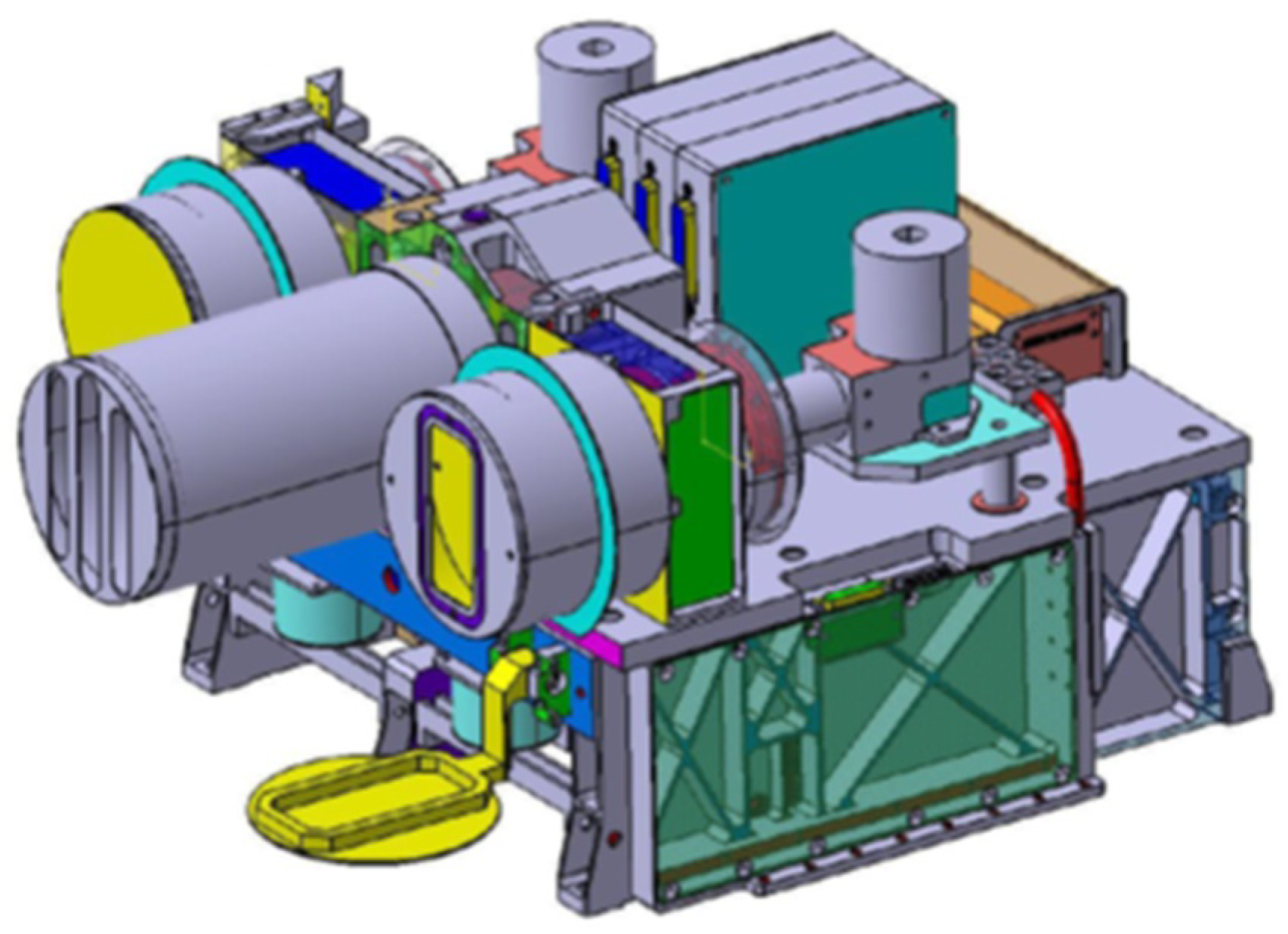
3. The FireBIRD Main Payload
- a two-channel infrared Hot Spot Recognition Sensor system (HSRS); and
- a Wide-Angle Optoelectronic Stereo Scanner adapted to the BIRD mission (WAOSS-B).
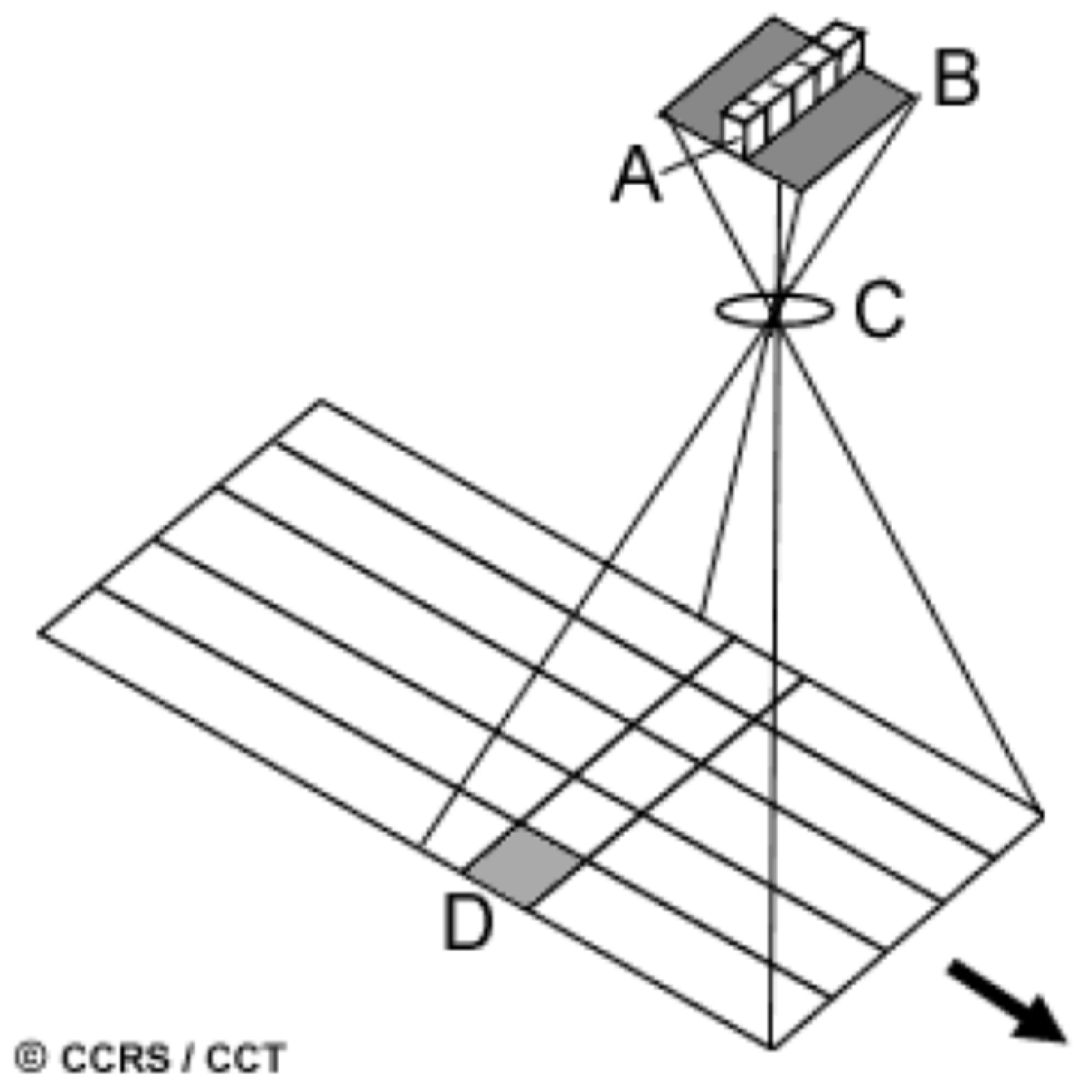
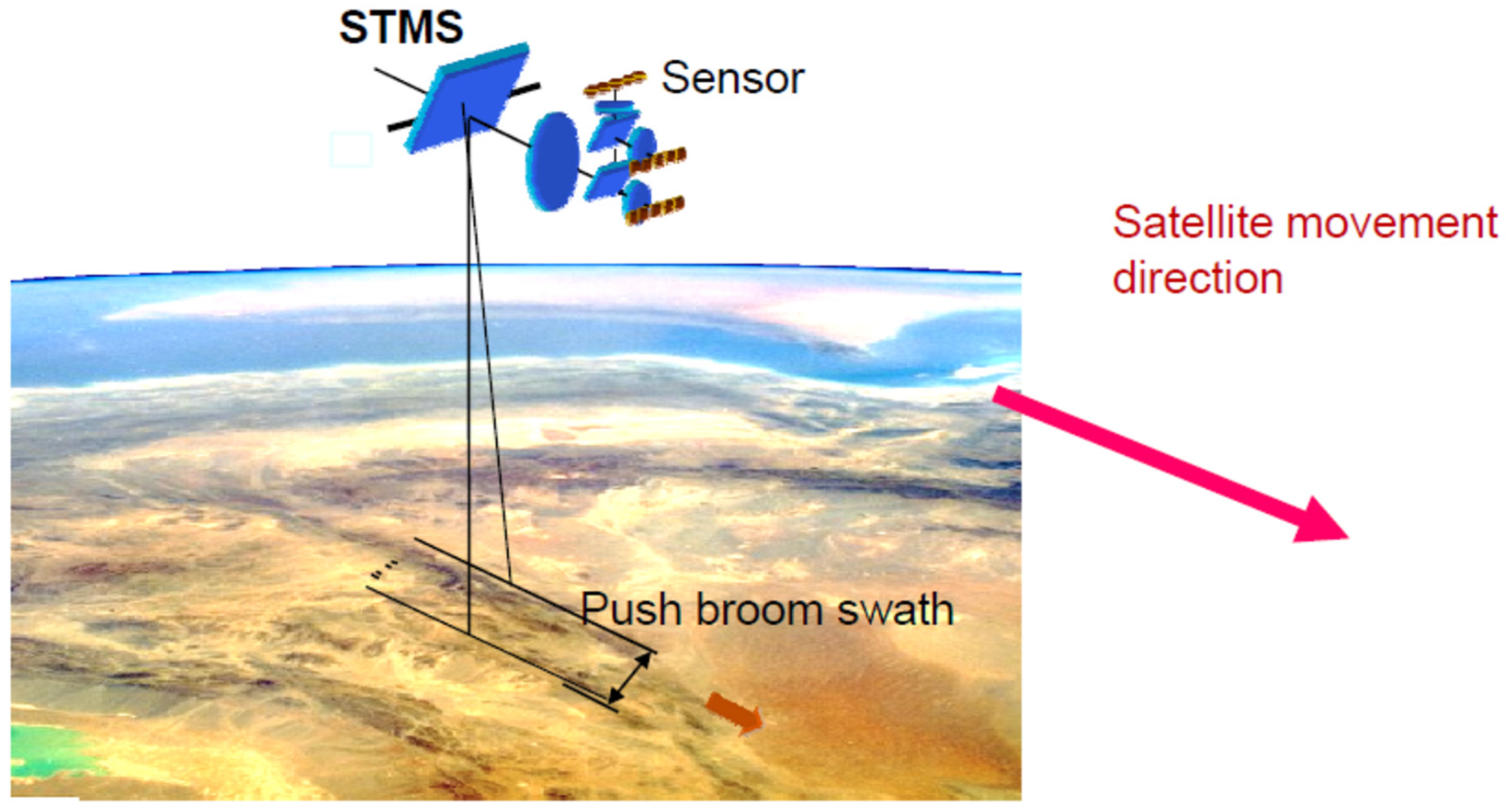
- The complete image scanning of the Earth takes place in one acquisition swath if the detector lines are read out with the pixel dwell time Tdw = GSD/V0, where:
- o
- the Ground Sampling Distance (GSD) is the sampling step width on the ground; and
- o
- V0 is the projection of the velocity vector of the satellite on the Earth’s surface, i.e., the velocity with which the satellite foot point moves over the Earth.
3.1. Bi-spectral Sensors of TET-1 and BIROS
- (1)
- The symbolic illustration of the flap positions in front of the MIR and TIR lenses chosen for Figure 1, however, does not correspond to the principal mode of their operation, which is characterized by both flaps being open or closed at the same time.
- (2)
- Tables and images from various original sources are used in this section, in some of which different abbreviations are used for the thermal and mid-IR wavelength ranges, such as:
- LW or LWIR (Long-Wave IR) for thermal IR (TIR); and
- MW or MWIR (Mid-Wave IR) for mid-IR (MIR).
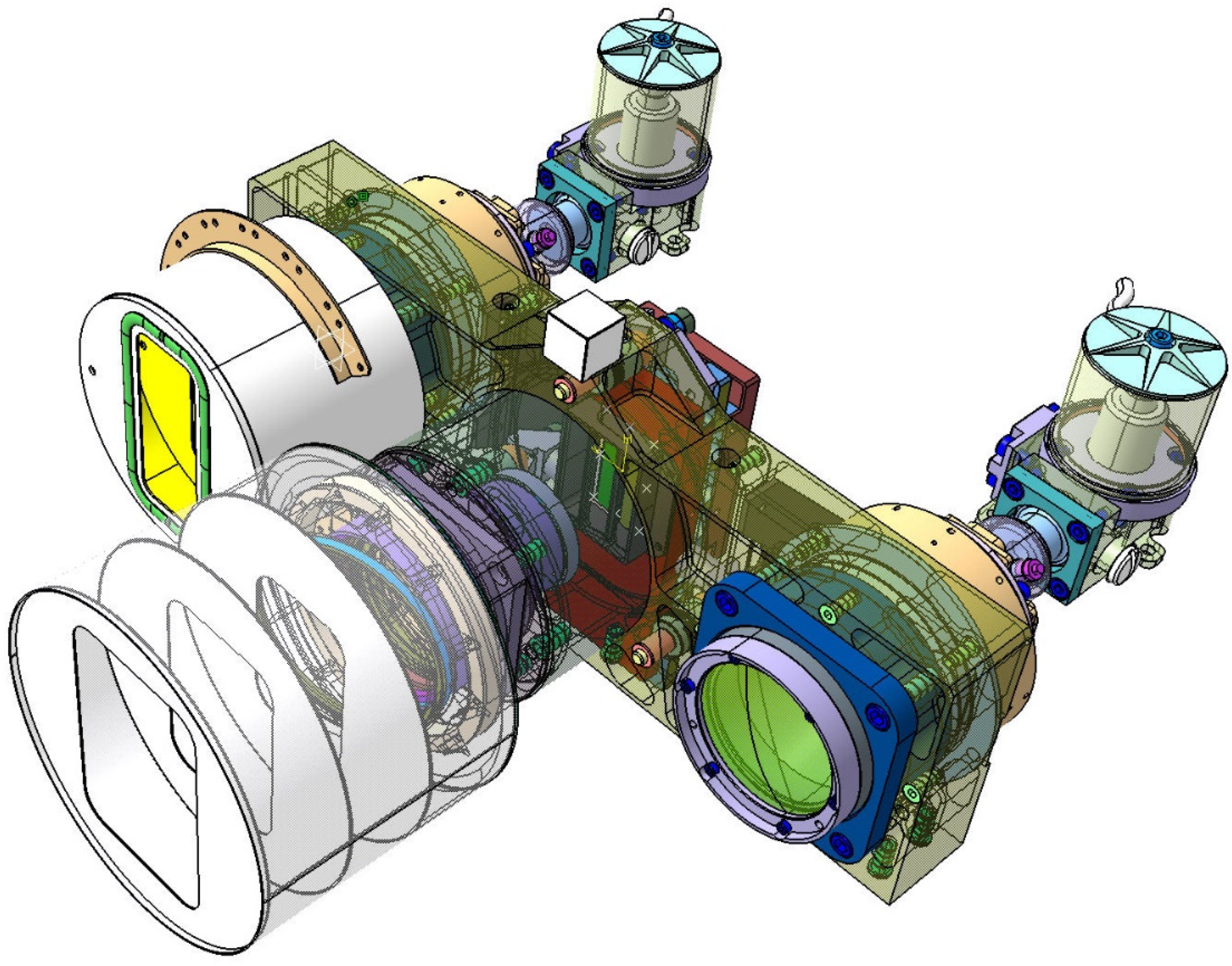
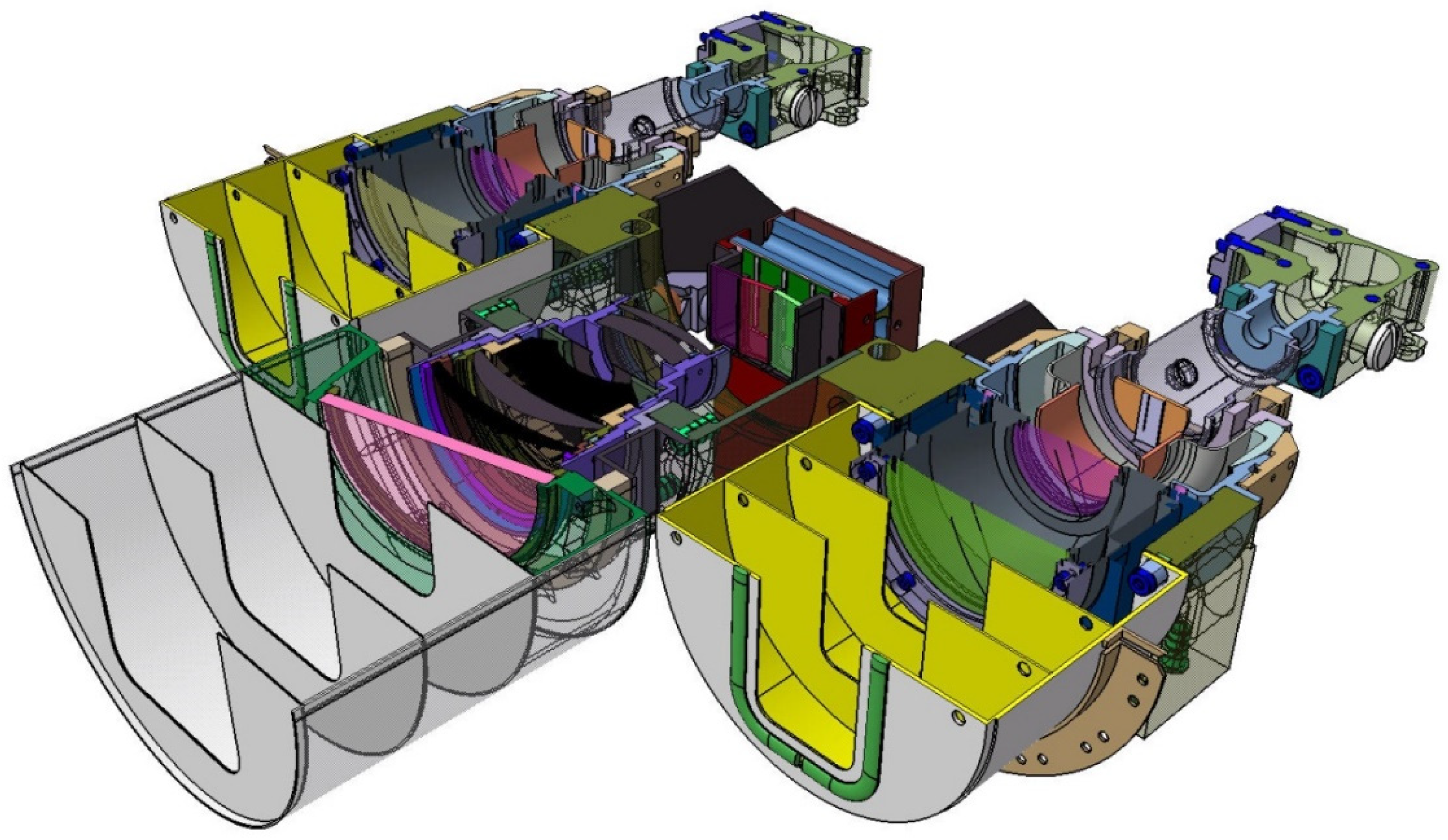
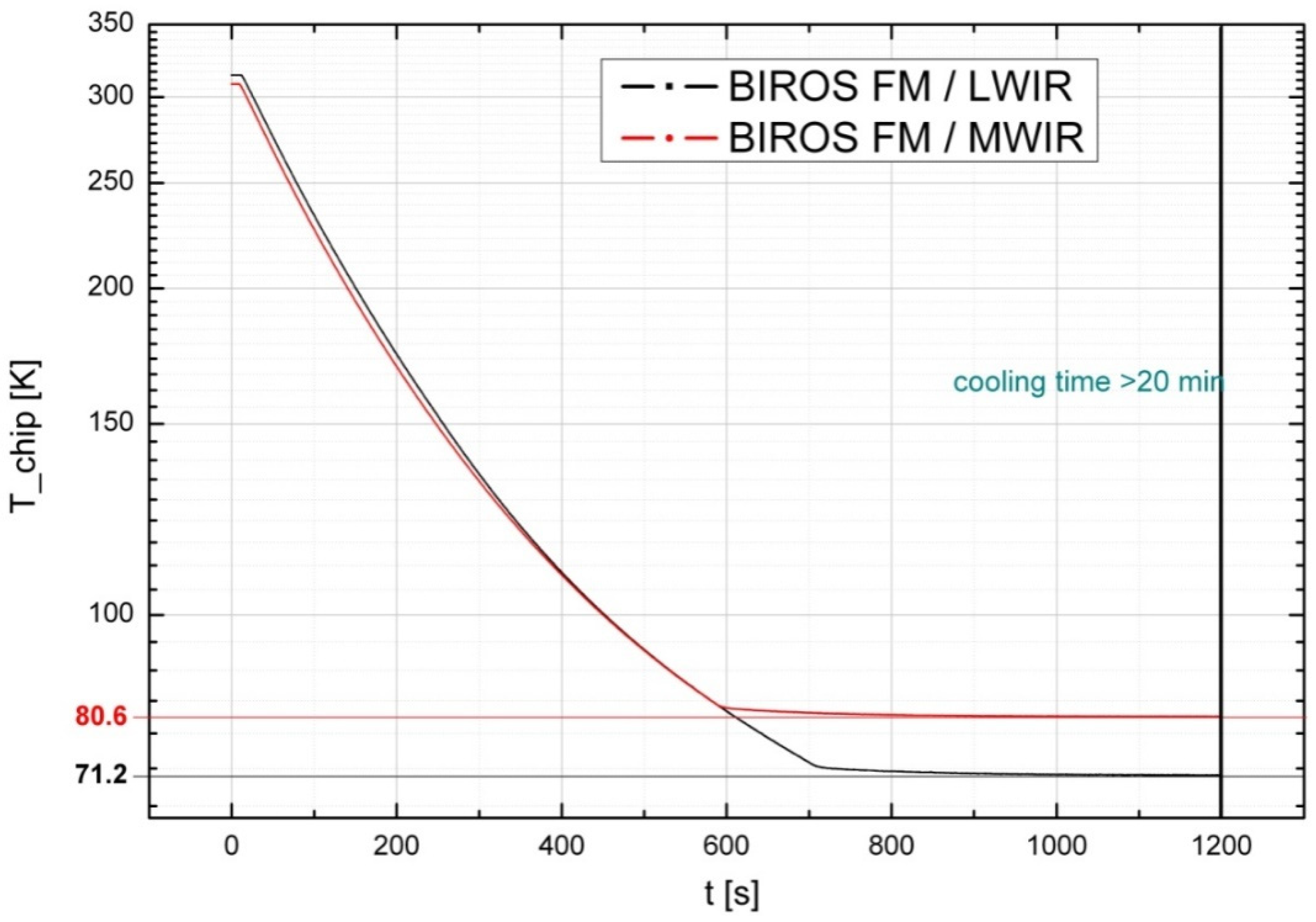
3.1.1. Design and Cooling of the Bi-Spectral Sensor Heads
- -
- on the right and left the yellow-colored so-called baffles, which protect the entrance optics of the MIR and TIR sensor head from stray light, and
- -
- the gray-colored Dewar vessels with their brown and gray input windows, behind which the chips of the CMT line detectors, represented by two small circles, are “flying” in the focal plane of the input lenses.
- (1)
- The use of the term “flying” is due to the fact that the cold fingers of the small refrigeration machines are not shown in this sectional view, but the CMT detector chips are mounted on the tips of the two cold fingers.
- (2)
- Numerous details of the VIS-NIR camera—shown in the center of Figure 5—will be discussed further below.
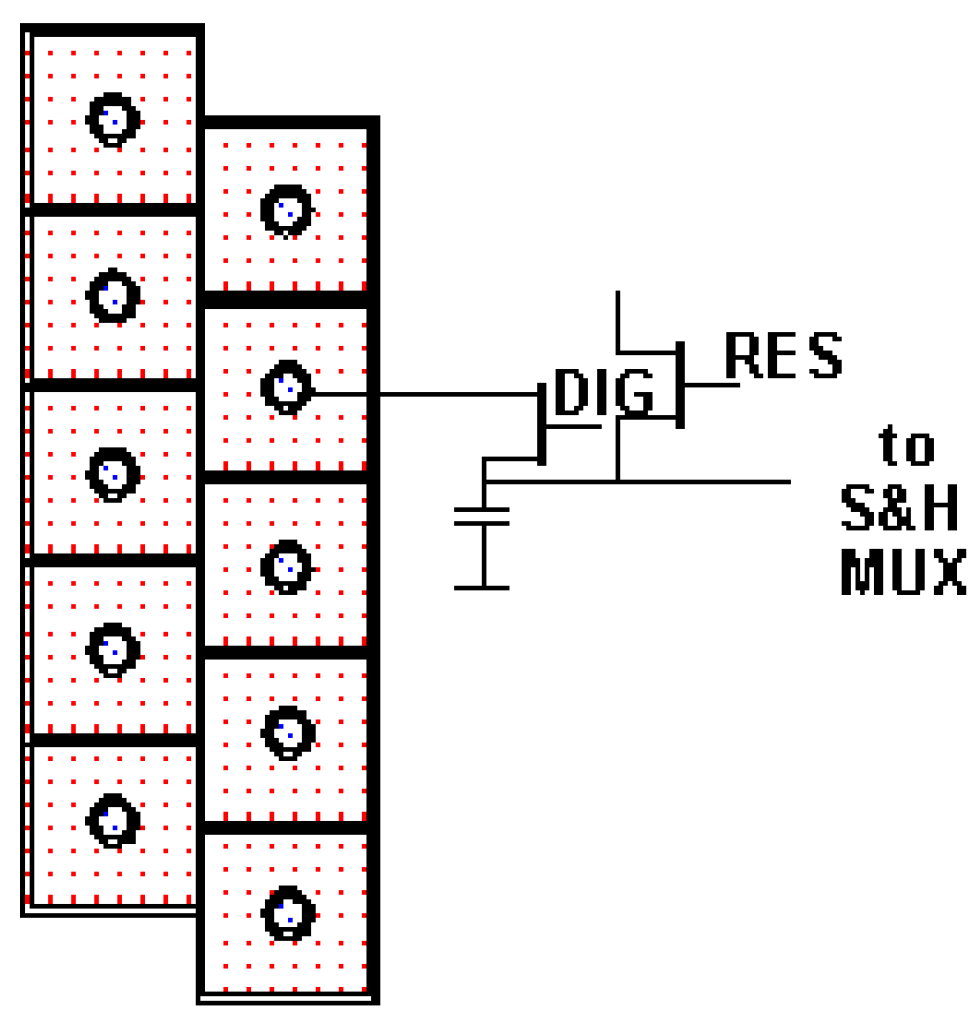
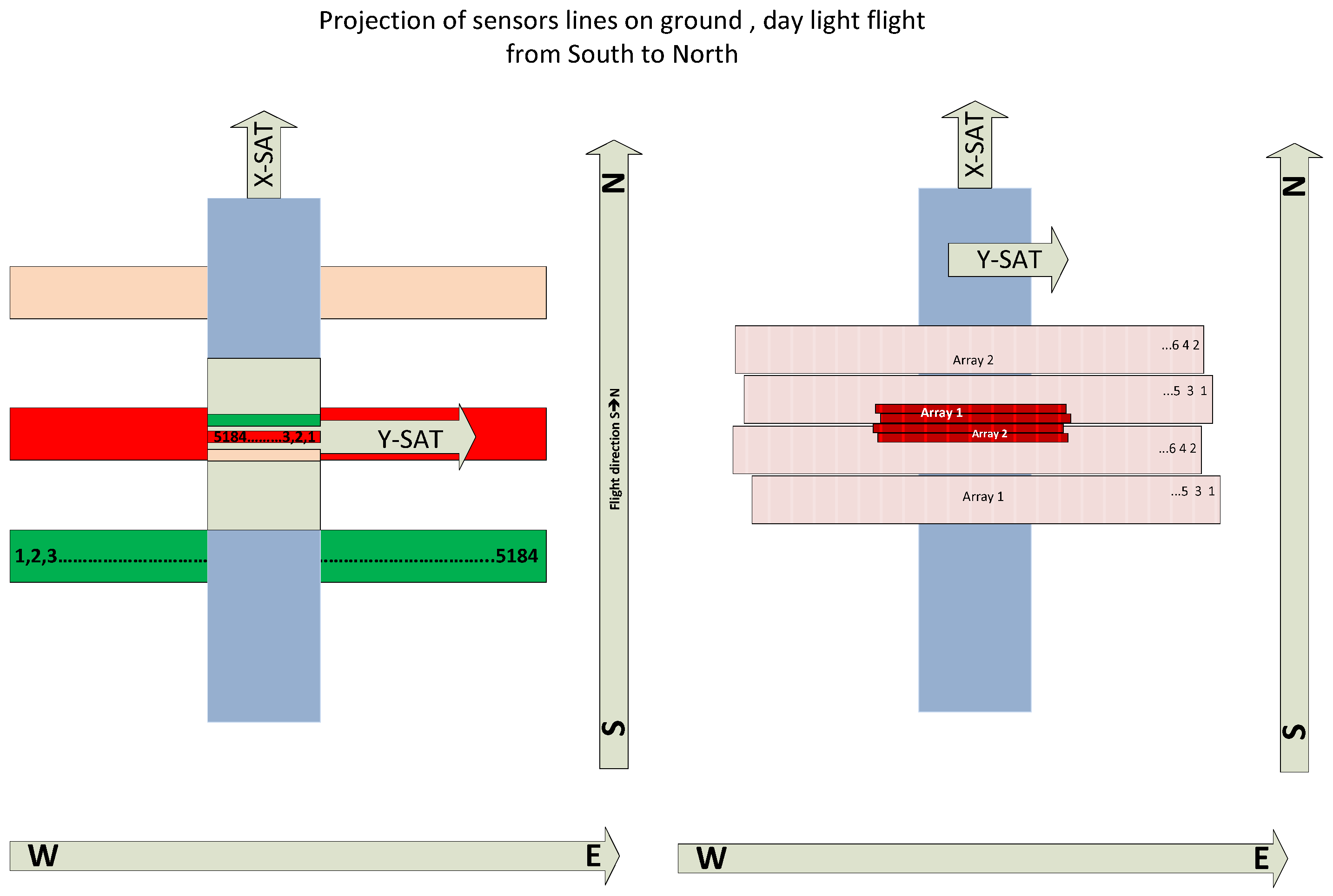
3.1.2. Spatio-Temporal Sampling of the FireBIRD Bi-Spectral IR Sensors
- varied via ground station command; and
- adjusted in real time to the signal strength.
- (a)
- If all 2 × 512 signal levels of the respective staggered line array are sufficiently far away from the saturation level at the commanded integration time (T int-com), which occurs in the first quarter of the sampling period of 25.4 ms, then no second exposure takes place within this sampling period.
- (b)
- If, however, even one of the 2 × 512 detecter element signal levels of the respective staggered line array is within the range of the saturation level at the commanded integration time Tint-com, which is triggered in the first quarter of the scanning period of 25.4 ms, a further exposure is carried out in the second half of the sampling period with an integration time shortened by a factor of 30 compared with T int-com. For the elements of the detector lines where the signal level was in the saturation range during the exposure with integration time T int-com, the digitized pixel samples are appended (at the end) to the data from the first sampling with T int-com.
3.1.3. Radiometric On-Board Calibration of the FireBIRD Bi-Spectral IR Sensors
- ramp-like increasing temperature curves are used for the blackbodies;
- continuous measurements of the blackbody radiation by the IR sensors; and
- temperature values of the temperature sensors integrated in the flap are recorded for each sampled measurement step of the IR sensor.
3.1.4. Radiometric Processor of the BIROS Bi-Spectral IR Sensor
- (a)
- in the laboratory from external blackbody measurements; and
- (b)
- on board with blackbody measurements using the closed flaps.
- Reading in and checking the consistency and completeness of the calibration data, the scene raw image data, and the “House Keeping (HK)” data;
- Determining the detector-element-related offset and sensitivity coefficients from the on-board calibration measurements for the MIR and TIR CdHgTe lines;
- Calculating radiance values from the in-flight scene measurements for each detector element, including those elements where the signal level at the exposure with integration time Tint-com is in the saturation range, and, therefore, a second exposure with a shortened integration time is automatically performed within the same sampling period, and then—by “on-board data handling (OBDH)” —appending these digitized pixel samples of the so-called hot pixels to the data from the first exposure (at the end);
- Determining insensitive detector elements, so-called “dead pixels”; and
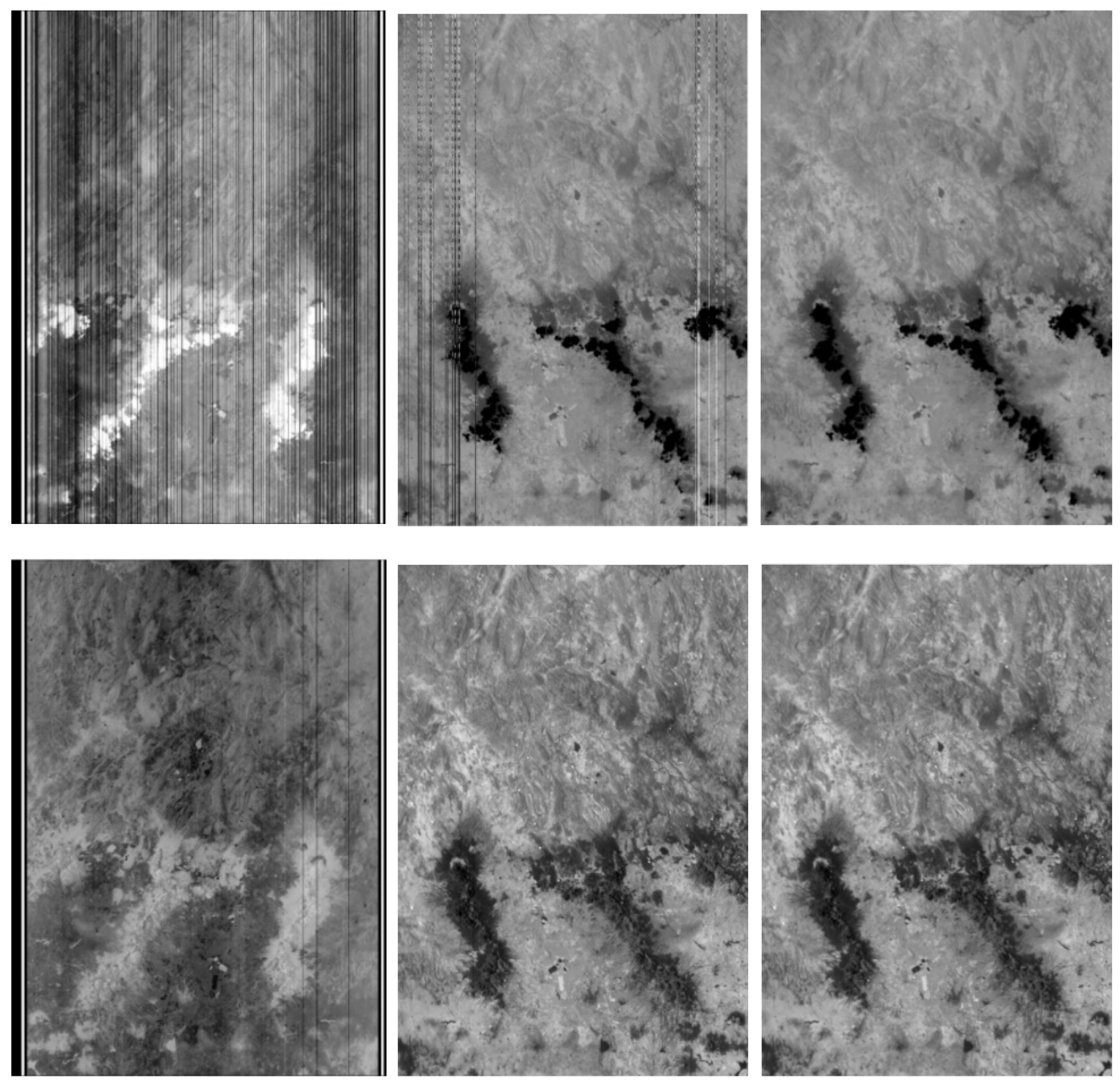
- Detecting and correcting (residual) striping artifacts.
3.2. VIS-NIR Push-Broom Camera of the BIROS Main Payload
- a band in the visual range (VIS), at 0.56–0.72 µm, in order to distinguish fire from solar reflections by pixel-wise ratio formation of the coregistered signals of the VIS band and MIR band, and to eliminate the latter as false alarms; and
- a near-infrared (NIR) band, at 0.79–0.93 µm, to create a cloud mask in daytime images to observe fires in cloud-free areas.
Structure and Function of the BIROS VIS-NIR Push-Broom Camera
- -
- p is the distance between two detector elements (pitch);
- -
- f is the focal length of the entrance lens; and
- -
- h is the orbit height of the satellite above the Earth.
3.3. Spatial Sampling of the FireBIRD Main Payloads
4. The BIROS Pre-Processing Unit
- to receive commands and software uploads transmitted from the FireBIRD ground station for telemetry and command (T/C) to the satellite during its overpass;
- to supervise the payload status and functioning based on the collection of house keeping (HK) data;
- to store all the generated scientific and HK data; and
- to transfer these data to the BIROS transmitters during the satellite’s overpass over the FireBIRD ground station.
5. General Design Principles and Features of Small Satellites for High-Resolution Fire Monitoring
- possibility of so-called “piggy-back launches” together with other satellites, because usually the cost of a piggy-back launch is much lower than that of a dedicated launch;
- accomodation of compact payloads with a high peak power (up to 100 W) and reasonable mean power consumption (<30 W); and
- technical feasibility of small satellite buses that provide sufficient electrical power and volume for these compact payloads with a high peak power and reasonable mean power consumption.
- a single-fault tolerance system design;
- a three-axis stabilization of the satellite’s orientation;
- an electrical power supply of 200 W at peak; and
- a total mass of the satellite bus <100 kg.
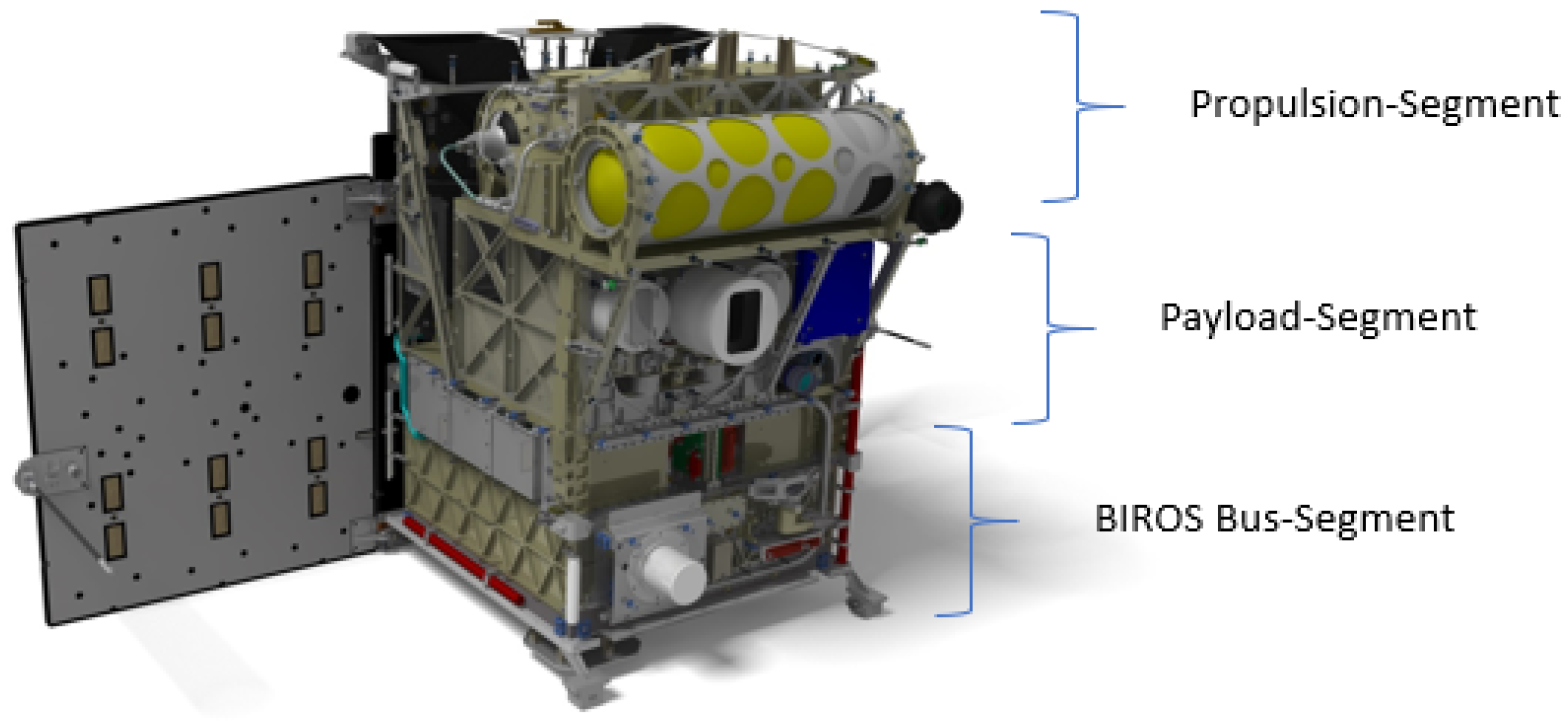
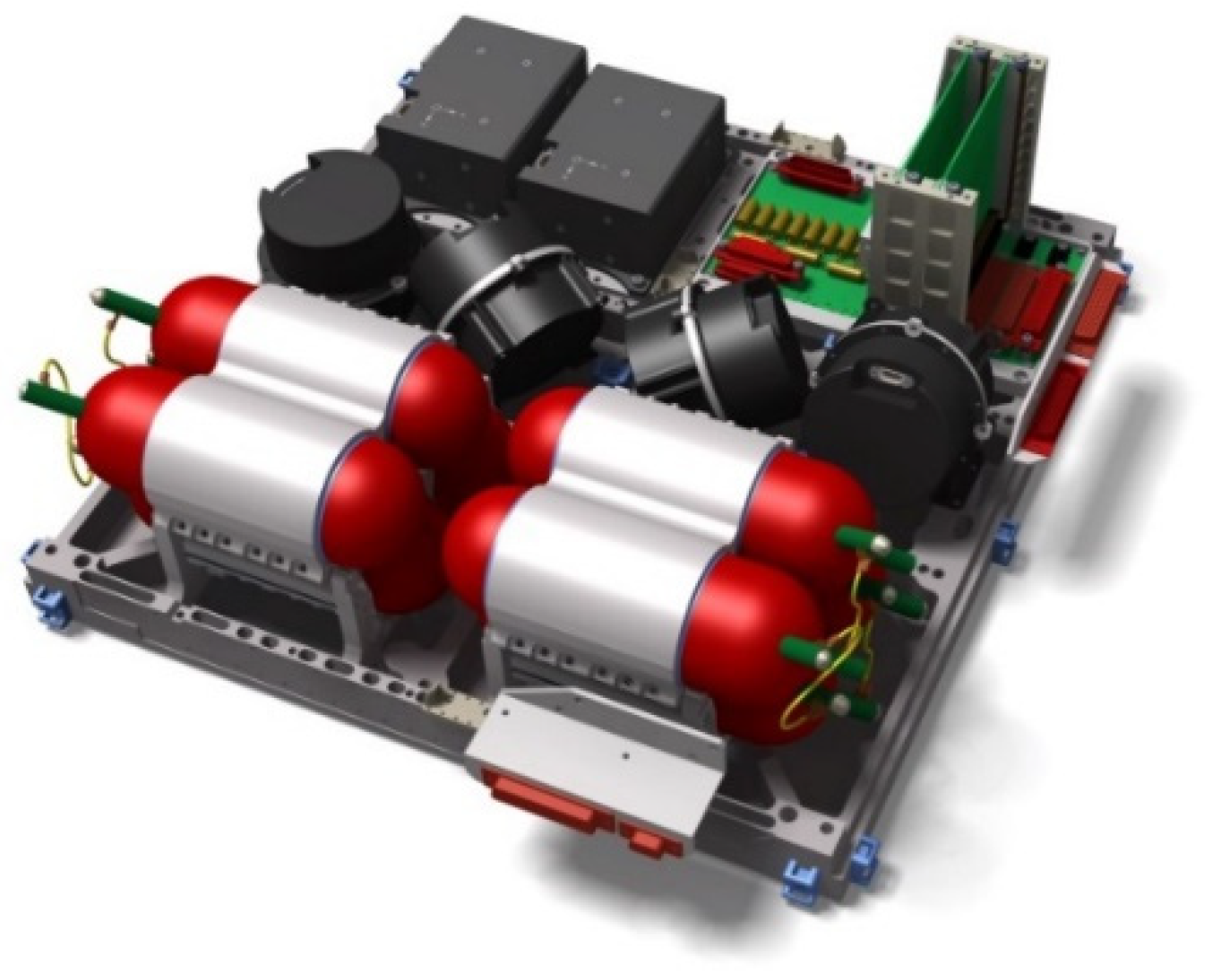
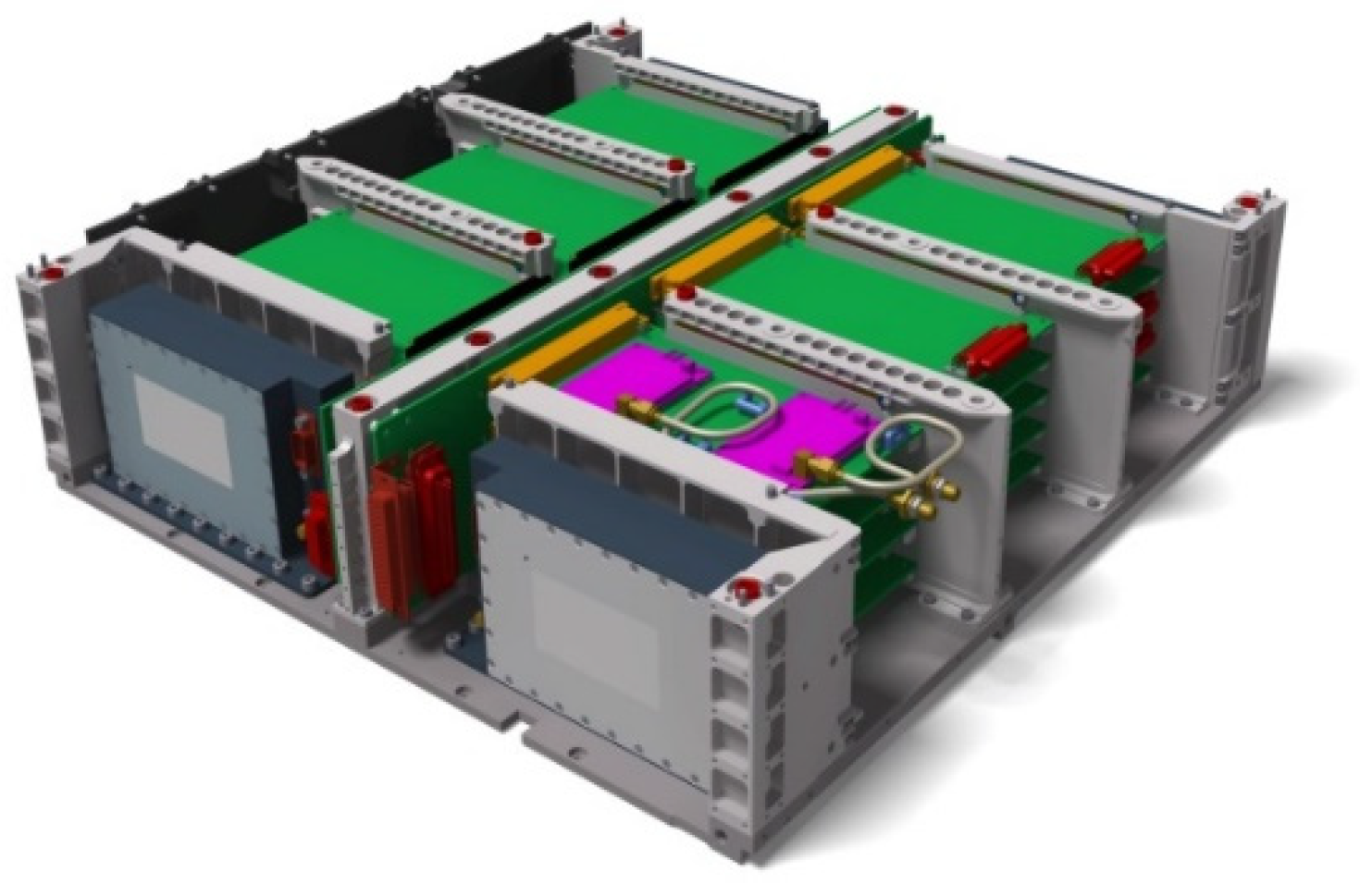
6. Overview of the FireBIRD Satellite Busses
7. Attitude and Orbit Control System of the FireBIRD Satellites
7.1. Requirements of the Attitude and Orbit Control System of the TET-1 and BIROS Satellites
- (I)
- The FireBIRD satellites shall be able to adjust the payloads’ viewing directions:
- (a)
- towards the Earth (nadir, zenith);
- (b)
- in the flight direction; and/or
- (c)
- to turn and hold the solar cells towards the sun.
- (II)
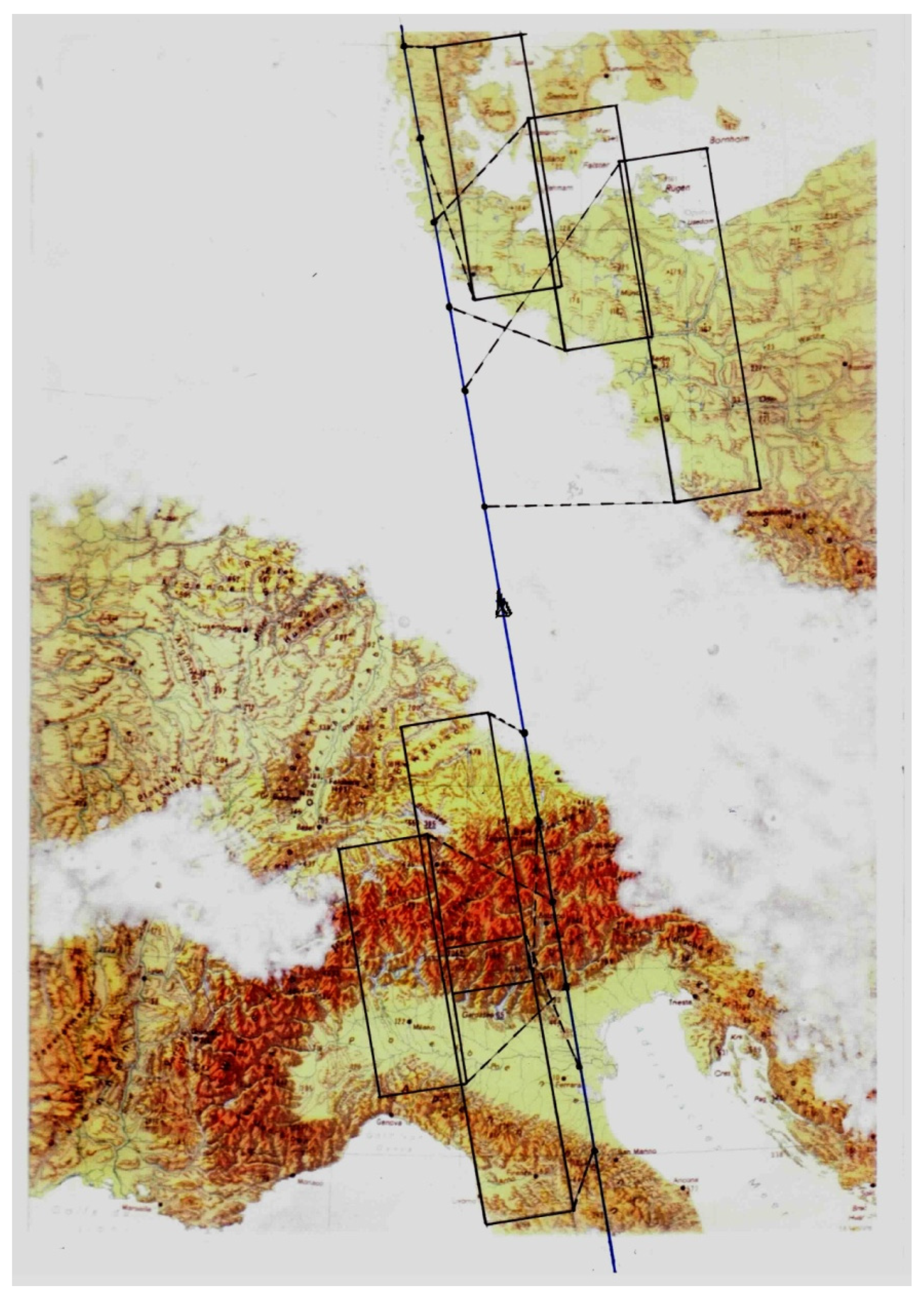
- The FireBIRD multi-spectral camera systems shall be able to acquire image data from different viewing directions with respect to the nadir vector. To accomplish this, the following maneuvers shall be feasible:
- roll around the satellite x-axis (±30°) to increase the Field of Regard (FoR); and
- pitch around the satellite x-axis (±30°) for stereo imaging.
- (III)
- Design drivers of the attitude control subsystem are the accuracy requirements for the orientation and stabilization of the “Line of Sight (LoS)” of the FireBIRD multi-spectral camera systems, i.e., the main payloads. The main accuracy requirements for attitude control and orientation determination of TET-1 and BIROS are derived from the optical parameters of their main payloads and are detailed in the “Mission Requirement Document” [3] and in the “Technical Specification Bus” [13] and can be briefly described as follows:
- The orientation accuracy of the satellite: In the so-called Earth-Pointing Mode, the attitude control system must align the satellite with the multi-spectral cameras system, i.e., the +Z axis of the satellite in the body-fixed coordinate system, in the direction of nadir to Earth with an accuracy of 5 arcmin.
- The jitter of the alignment accuracy for Earth observation shall be less than 2 arcmin/sec.
- The accuracy of orientation determination relative to Earth: The attitude control and navigation system shall determine the orientation of the satellite relative to the Earth with an accuracy of 24 arcsec.
- The accuracy of the position determination of an image point of the multi-spectral camera system on the Earth’s surface in the coordinate system WGS 84 (World Geodetic System 1984) shall be <150 m.
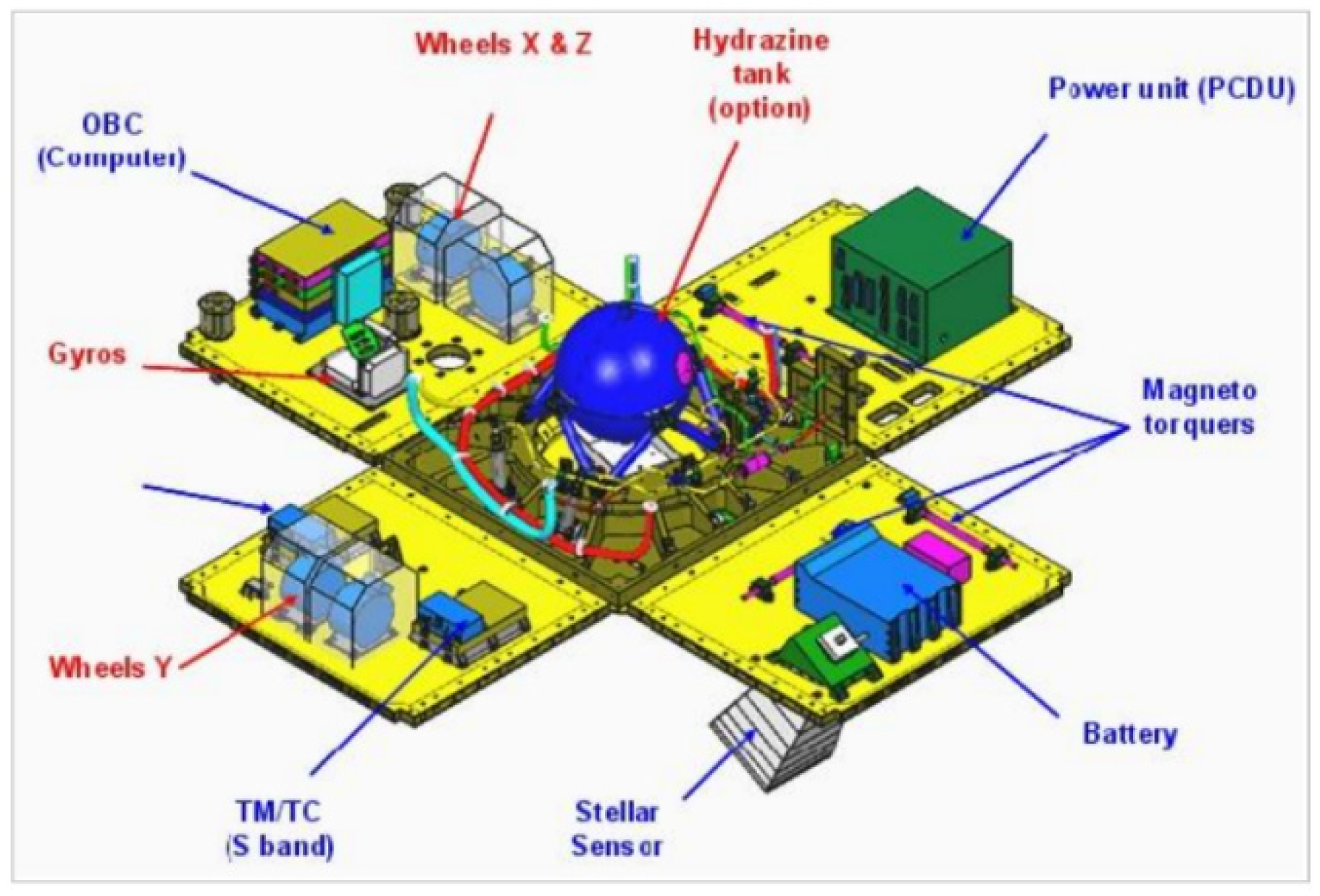
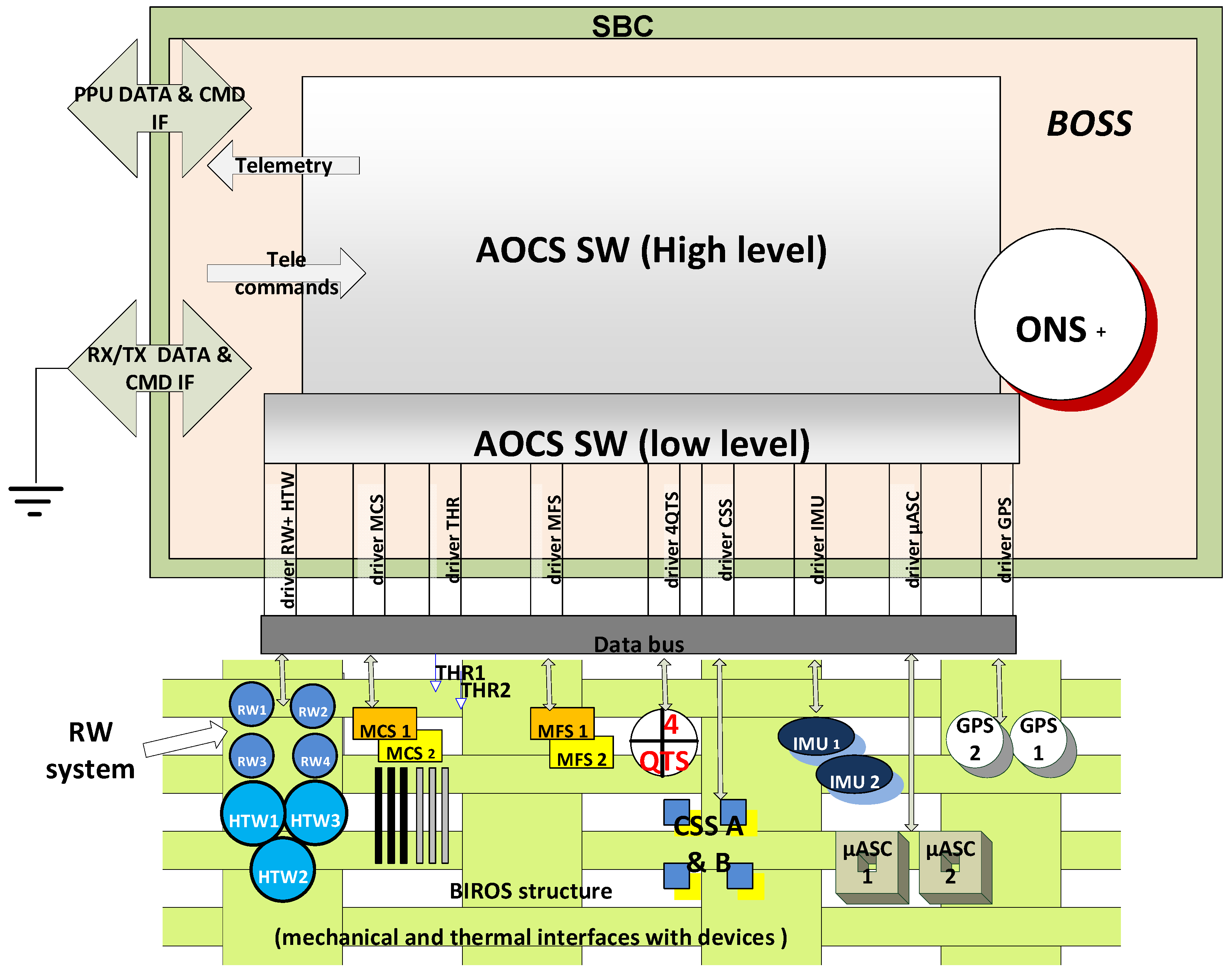
7.2. The Attitude and Orbit Control Subsystem of the FireBIRD Satellites
- two redundant Autonomous Star Cameras (ASCs), i.e., the “Star Sensor Systems” shown in Figure 15;
- two redundant Inertial Measurement Units (IMUs);
- two redundant flux-gate Magnetic Field Sensors (MFSs);
- four redundant Coarse Sun Sensors (CSSs); and
- two redundant Geo Positioning System (GPS) receivers.
- four Reaction Wheels (RWs); and
- three redundant Magnetic torquer Coils (MCs).
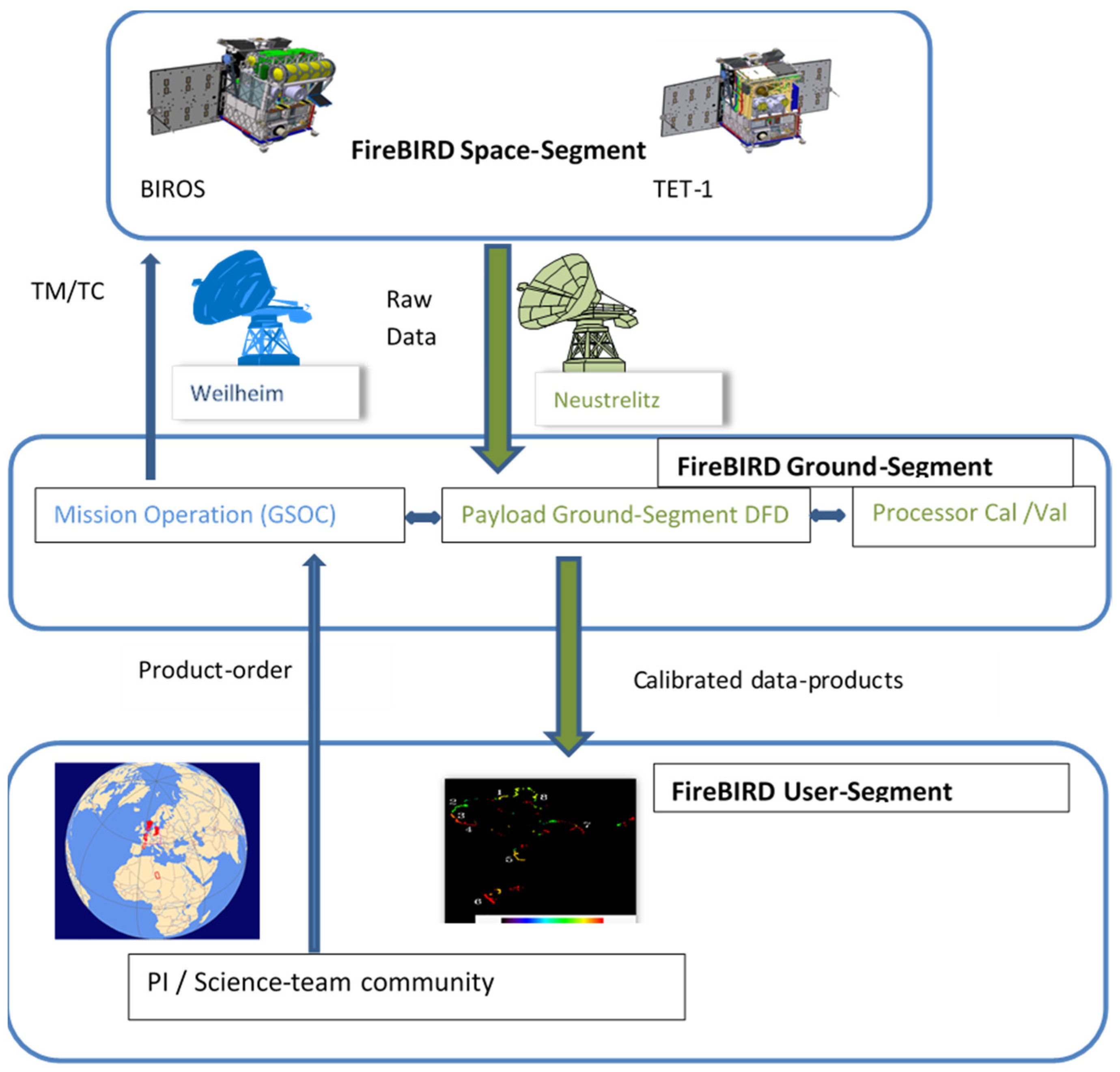
8. Short Overview of the FireBIRD Ground Segment
9. Innovative Tools to Increase the Agility of Small Satellites
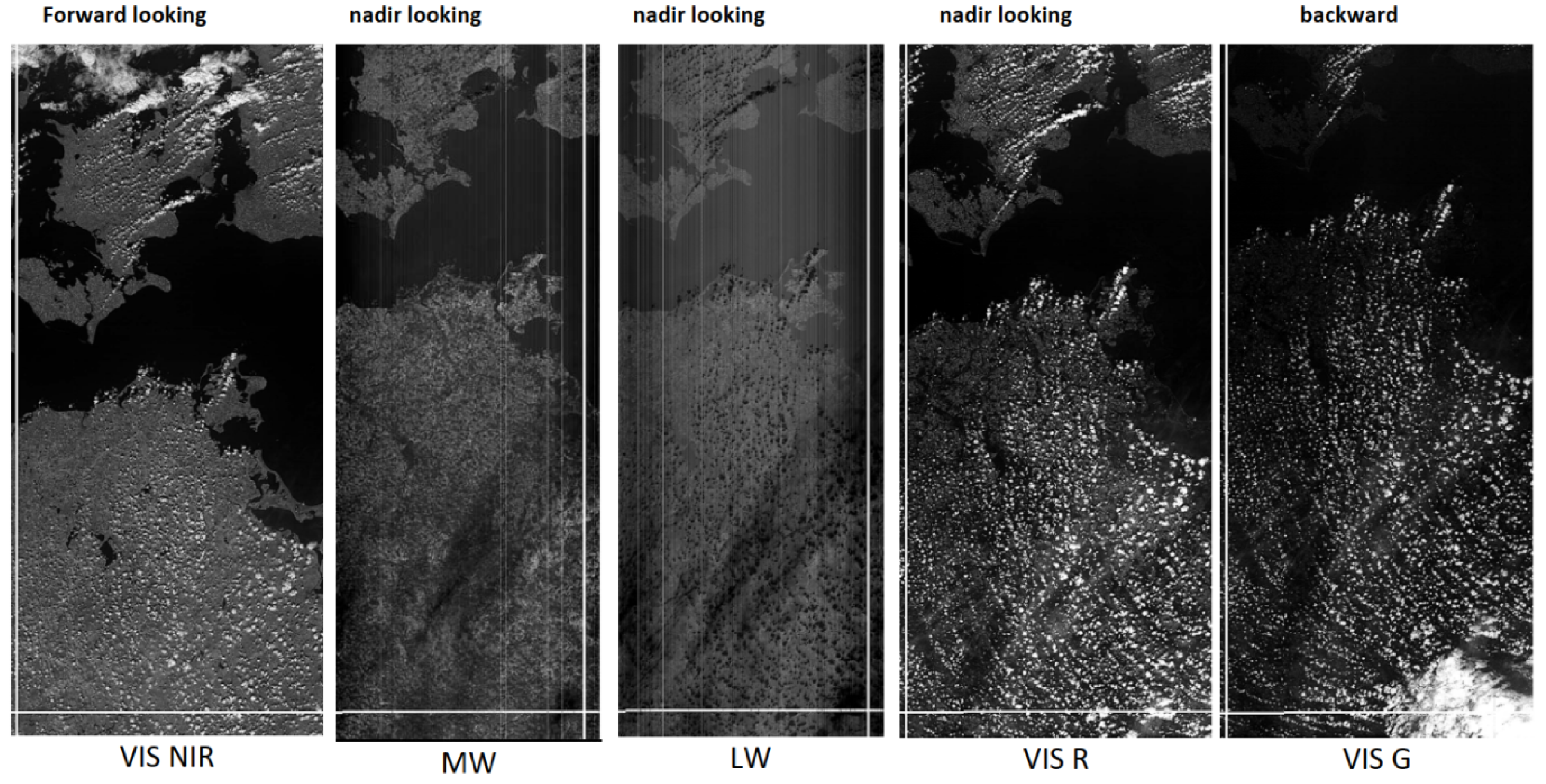
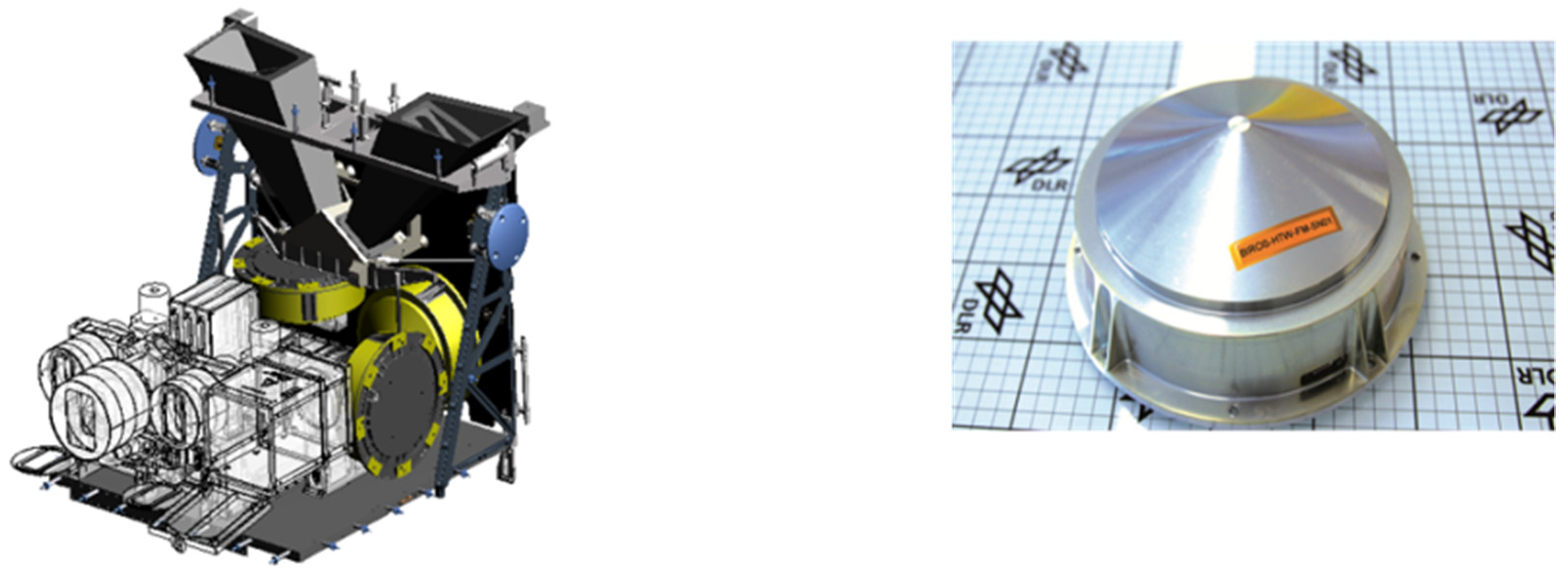
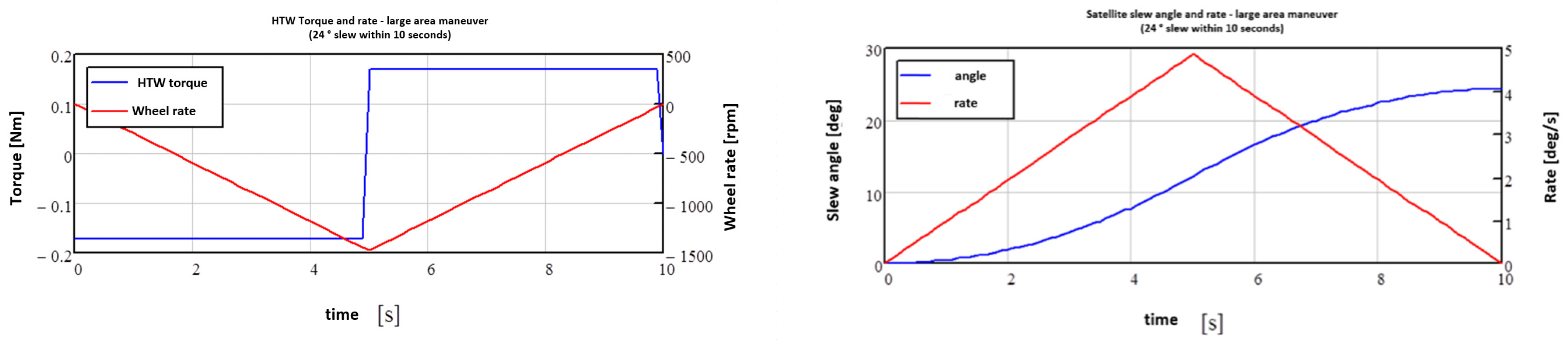
9.1. The BIROS High-Torque Wheels
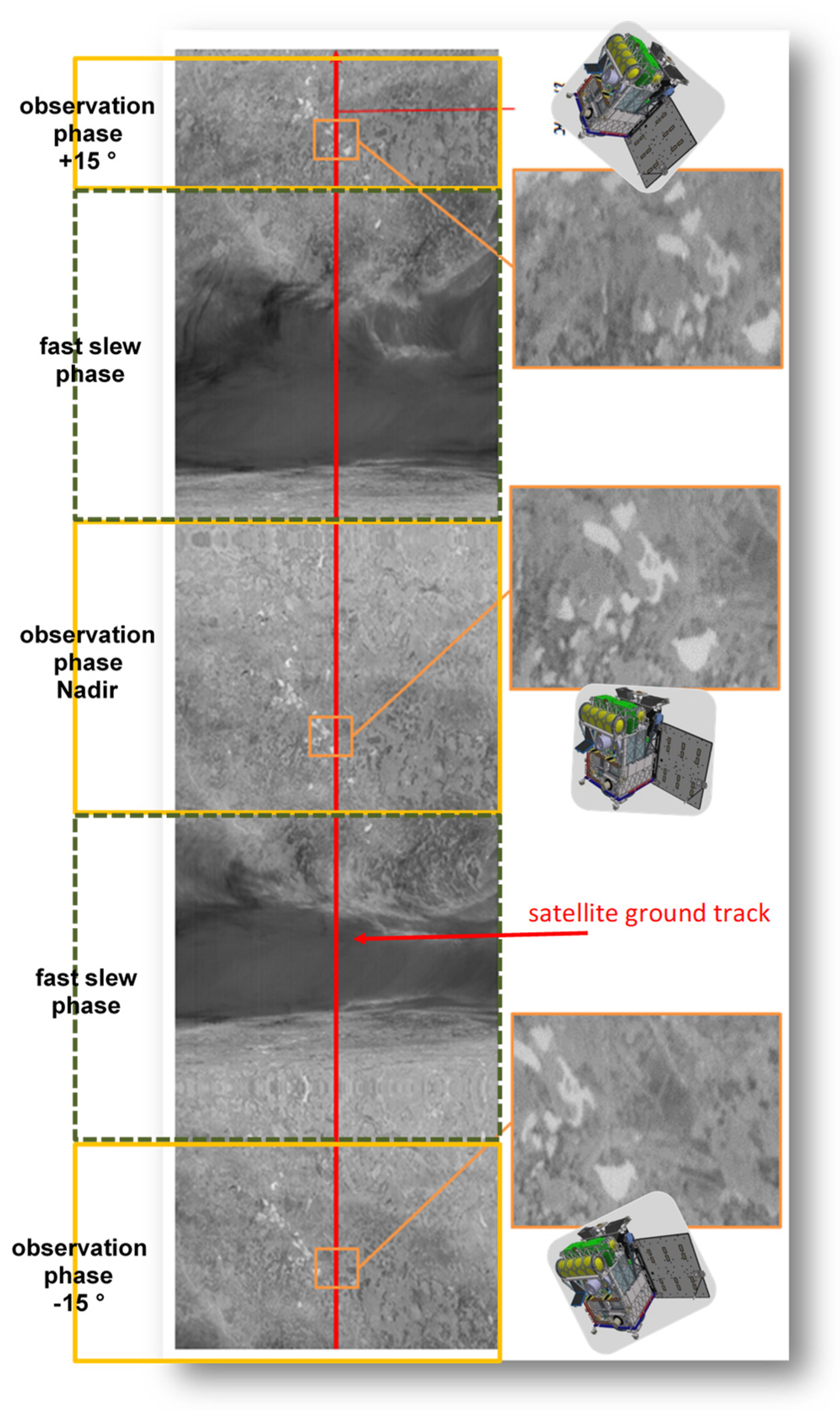
- -
- looking 15° forward in a quiet state;
- -
- slew 15° from forward to nadir;
- -
- looking nadir in a quiet state;
- -
- slew 15° from nadir to backward; and
- -
- looking 15° backward in a quiet state.
9.2. The BIROS RGB Matrix Camera
- The maximum sampling time Ts-matrix-max may be larger by a factor of N, compared with the Ts-line-max of a linear detector array, where N is the number of detector lines in the matrix array;
- Using, for example, a sampling time of Ts-matrix = Ts-matrix-max/m >> Ts-line-max, m overlapping scene samples can be acquired, digitized, and processed by so-called binning, i.e., an m-fold digital signal accumulation, to improve the signal-to-noise ratio (SNR) by a factor of (m)1/2; and
- Stripped spectral filters may be aligned in front of the matrix array segments, which are read out in parallel, to create a multi-spectral camera based on one matrix array detector.
9.3. High Agility of Prospective Small Satellites with IR Sensors
- a cooled CdHgTe matrix detector array in combination with stripped filters in the multi-spectral MIR/TIR sensor (allowing for fast sampling with overlaps also for supplementary data binning); and
- HTWs as the key actuators to enable fast and agile pointing of the sensor’s LoS.
10. Conclusions and Recommendations
- higher spatial resolution data acquisition without signal saturation from major fires;
- the capacity to augment and validate the more frequent but lower spatial resolution active fire datasets provided by the operational systems, especially for the purpose of detecting smaller and weaker fires, including the derivation of their FRP values; and
- the delivery of active fire data (also with a higher spatial resolution) acquired (i) at different local times and (ii) at local times in the afternoon when fires are at their most severe.
- Integrated Detector Cooler Assemblies (IDCAs) of Cadmium Mercury Telluride (CMT) photovoltaic matrix arrays for the MIR and TIR wavelength regions with, for example, 1280 × 1024 detector elements; and
- C-MOS and CCD Si semiconductor matrix detector arrays with, for instance, 9000 × 6000 detector elements.
- MIR/TIR sensor arrangements, including the Integrated Detector Cooler Assembly (IDCA),
- on-board data handling and processing; and
- satellite agility.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Briess, K.; Jahn, H.; Lorenz, E.; Oertel, D.; Skrbek, W.; Zhukov, B. Fire recognition potential of the Bi-spectral Infrared Detection (BIRD) satellite. Int. J. Remote Sens. 2003, 24, 865–872. [Google Scholar] [CrossRef]
- Zhukov, B.; Lorenz, E.; Oertel, D.; Wooster, M.; Roberts, G. Spaceborne detection and characterization of fires during the bi-spectral infrared detection (BIRD) experimental small satellite mission (2001–2004). Remote Sens. Environ. 2006, 100, 29–51. [Google Scholar] [CrossRef]
- Terzibaschian, T.; Lorenz, E.; Bärwald, W.; Halle, W. FireBird Mission Requirement Document; DLR, Institut für Optische Sensorsysteme: Berlin, Germany, 2013. [Google Scholar]
- Oertel, D.; Zhukov, B.; Wooster, M.; Tank, V.; Lorenz, E.; Holzer-Popp, T.; Goldammer, J.; Martinez, S.; Siegert, F. ECOFIRE—Study on Scientific Assessment of Space-Borne High Temperature Event Observing Mission Concepts; (ESA/ESTEC Contract 17690/30/NL/FF); Final Report; + Report on Work Task 350; German Aerospace Center (DLR): Berlin, Germany, 2005. [Google Scholar]
- GEC Marconi INRA-RED. BIRD IR DETECTOR PROPOSAL Types E3437 AND E3438, Prog. Doc. No. Q3032, Issue 1. 4 October 1996; (Internal Report from GEC). [Google Scholar]
- Skrbek, W.; Lorenz, E. HSRS—An Infrared Sensor for Hot Spot Detection. In Proceedings of the SPIE’s 43rd Annual Meeting, San Diego, USA, CA, 19–24 July 1998. [Google Scholar]
- Halle, W.; Fischer, C.; Terzibaschian, T.; Zell, A.; Reulke, R. Infrared-Image Processing for the DLR FireBIRD Mission. In Pattern Recognition, ACPR, 2020, Communications in Computer and Information Science; Cree, M., Huang, F., Yuan, J., Yan, W., Eds.; Springer: Singapore, 2020; Volume 1180. [Google Scholar] [CrossRef] [Green Version]
- Dozier, J. A method for satellite identification of surface temperature fields of subpixel resolution. Remote Sens. Environ. 1981, 11, 221–229. [Google Scholar] [CrossRef]
- Jahn, H.; Reulke, R. Staggered Line Arrays in Pushbroom Cameras: Theory and Application. 2000. Int. Arch. Photogramm. Remote Sens. 2000, 33, 164–172. [Google Scholar]
- Sandau, R. (Ed.) International Study on Cost-Effective Earth Observation Missions; Taylor& Francis Group Plc: Leiden, The Netherland, 2006; ISBN1 10-0-415-39136-9. ISBN2 13-9-78-415-39136-9. [Google Scholar]
- Walter, I.; Briess, K.; Baerwald, W.; Skrbek, W.; Schrandt, F. The BIRD payload platform, SPIE-Proceedings. In Sensors, Systems and Next—Generation SatellitesVI; SPIE: Crete, Greece, 2003; Volume 4881. [Google Scholar] [CrossRef]
- Landiech, P. CNES Mini and Macro Satellites Teams. In Overview on CNES Micro and Mini Satellites Missions: In Flight, Under Development and Next, Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, 26–30 May 2008; ESA SP-660; ESA: Paris, France, 2008. [Google Scholar]
- Bärwald, W.; Schultz, C.; Eckert, S. OOV TET-1 Technische Spezifikation Satellitenbus TSB; DLR, Institut für Optische Sensorsysteme: Berlin, Germany; Astro-und Feinwerktechnik GmbH: Berlin, Germany, 2009. [Google Scholar]
- Raschke, C. Drehmomentengeber zur Hoch Agilen Lageregelung von Optischen Fernerkundungssatelliten. Ph.D. Thesis, TU Berlin, Berlin, Germany, 2018. DLR-Forschungsbericht DLR-FB-2018-26 Dissertationsschrift. [Google Scholar]
- Gaias, G.; Ardaens, J.-S.; Schultz, C. The AVANTI Experiment: Flight Results. In Proceedings of the 10th International ESA Conference on Guidance, Navigation & Control Systems, Salzburg, Austria, 29 May–2 June 2017. [Google Scholar]
- Oertel, D.; Ruecker, G.; Hartmann, M.; Hirsch, H.; Kaiser, J.W.; Walter, I.; Wooster, M.; Zhukov, B. Infrared Imaging Sensor Suite—Mission (IRIS-M), 2013. In Proceedings of the “1st International Earth Observation Convoy and Constellation Workshop”, ESA/ESTEC, Noordwijk, The Netherlands, 9–19 October 2013. [Google Scholar]
- Ruecker, G.; Menz, G.; Heinemann, S.; Hartmann, M.; Oertel, D. VISIR-SAT—A Prospective Micro-Satellite Based Multi-Spectral Thermal Mission for Land Applications, 2015, ISPRS—International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2015, XL-7(W3), 1283–1289. [Google Scholar]
- Vorrichtung zur Kompensation von Drehmomenten bei Scan-und Tiltspiegelsystemen für Mikrosatelliten, Gebrauchsmusterschrift. Aktenzeichen 20 2014 004 792.8, 25 September 2014.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| HSRS | WAOSS-B | |
|---|---|---|
| Spectral bands | MIR: 3.4–4.2 µm (nadir) TIR: 8.5–9.3 µm (nadir) | NIR: 0.84–0.90 µm (nadir and off-nadir) RED: 0.60–0.67 µm (off-nadir) |
| Focal length | 46.39 mm | 21.65 mm |
| Field of view (FOV) | 19° | 50° |
| f-number | 2.0 | 2.8 |
| Detector type | CdHgTe arrays | CCD lines |
| Detector cooling | Stirling, 80–100 K | Passive, 293 K |
| Detector element size | 30 µm × 30 µm | 7 µm × 7 µm |
| Pixel number | 2 × 512 staggered | 2880 |
| Quantization | 14 bit (for each exposure) | 11 bit |
| Ground pixel size | 370 m | 185 m |
| Sampling step | 185 m | 185 m |
| Swath width | 190 km | 533 km |
| Features and Parameters | Bi-Spectral IR Sensor | VIS-NIR Camera |
|---|---|---|
| Wavelength bands (µm) | MIR: 3.4–4.2; TIR: 8–5–9.3 | VIS: 0.5 & 0.6; NIR: ~0.8 |
| Field of View (FOV) * | 19° | 19.6° |
| Detector type | CdHgTe line arrays, cooled to 71 K for TIR and 80 K for MIR | Charge-Coupled Device (CCD) line array without cooling |
| Detector element pitch (µm) | 30 × 30 | 7 × 7 |
| Number of detector elements | 2 × 512 | 3 × 5164 |
| Swath width (km) | 178 | 211 |
| Linear pixel size on ground (m) | 356 | 42.4 |
| Sampling step on ground (m) | 178 | 42.4 |
| Pixel dwell time Tdw (ms) | 25.4 | 6.05 |
| Detector | |
| Detector operation temperature | 80 K |
| Number of elements | 1024 |
| Element Material | CdHgTe, photovoltaic diode |
| Multiplexer circuitry | CMOS |
| Element stagger, line to line | 15 µm |
| Array format | 512 × 2 elements |
| Element pitch | 30 µm |
| Spacing between lines | 30 µm |
| Window | Germanium (AR coated) |
| Field of view | f/2.0 |
| Filter cut-on wavelength | MW: 3.4 µm; LW: 8.5 µm |
| Filter cut-off wavelength | MW: 4.2 µm; LW: 9.3 µm |
| Number of outputs | 4 |
| Dynamic range | 1.6 V |
| Power consumption | 55 mW |
| Output impedance | 55 Ω |
| Integration capacitors | 1.1, 2.2, 2.4, 3.5 pF |
| Performance | |
| NEΔT (median) | upper limit MW: 45 mK for 4 ms stare time: LW: 40 mK for 1.5 ms stare time. |
| Number of dead elements | 10 maximum |
| Number of defective elements | 50 maximum |
| Signal uniformity | ± 25% of central value |
| Pixel rate | 5.0 MHz max. per output |
| Attitude Mode | Brief Characterization and Function |
|---|---|
| Inertial pointing mode | Align the satellite with an inertial frame |
| Earth pointing mode | Align the satellite with an orbital fixed frame |
| Target pointing mode | Align a satellite axis with the direction to a fixed target on the ground |
| Sun pointing mode | Align a satellite axis with the direction to the Sun |
| Client observation mode | Align a satellite axis with the direction to another spacecraft |
| BOSS: BIROS Operating System | MCS: Magnetic Coil System |
| CMD: Command | MFS: Magnetic Field Sensor |
| CSS: Cors Sun Sensor System | ONS+: on-board Navigation System (+ stands for extended version, comp. with TET-1) |
| DTA: Data | QTS: Quadrant Sensor |
| IMU: Inertial Measurement System (Gyro System only) | RW: Reaction Wheel |
| GPS: Global Positioning System | Rx: Receiver Unit |
| HTW: High Torque Wheels | THR: Thruster Unit |
| IF: Interface | Tx: Transmitter Channel |
| µASC: Star Sensor System |
| Features | TET-1 | BIROS | Innovative IR Micro-Satellite |
|---|---|---|---|
| MIR/TIR sensor arragements, including the IDCA | One separate optics array, one linear detector array (an IDCA), and one on-board calibration unit for each IR band | One optics array, one matrix detector array (an IDCA), and one on-board calibration unit for each of the MIR and TIR multi-band sensor heads, or for one MIR/TIR sensor head. | |
| On-board data handling and processing | In both IR bands: supplementary registration of hot pixel signals with a 30 times shorter integration time within the same sampling step, to allow for Hot Area reconstruction during the off-line ground data processing | Registration of multiple overlapping image fragments in all IR bands with at least two different integration times and subsequent band-related digital binning of the data to improve the signal-to-noise ratio (SNR) and to reduce the raw data rate. Fire detection and estimation of the FRP and other fire attributes | |
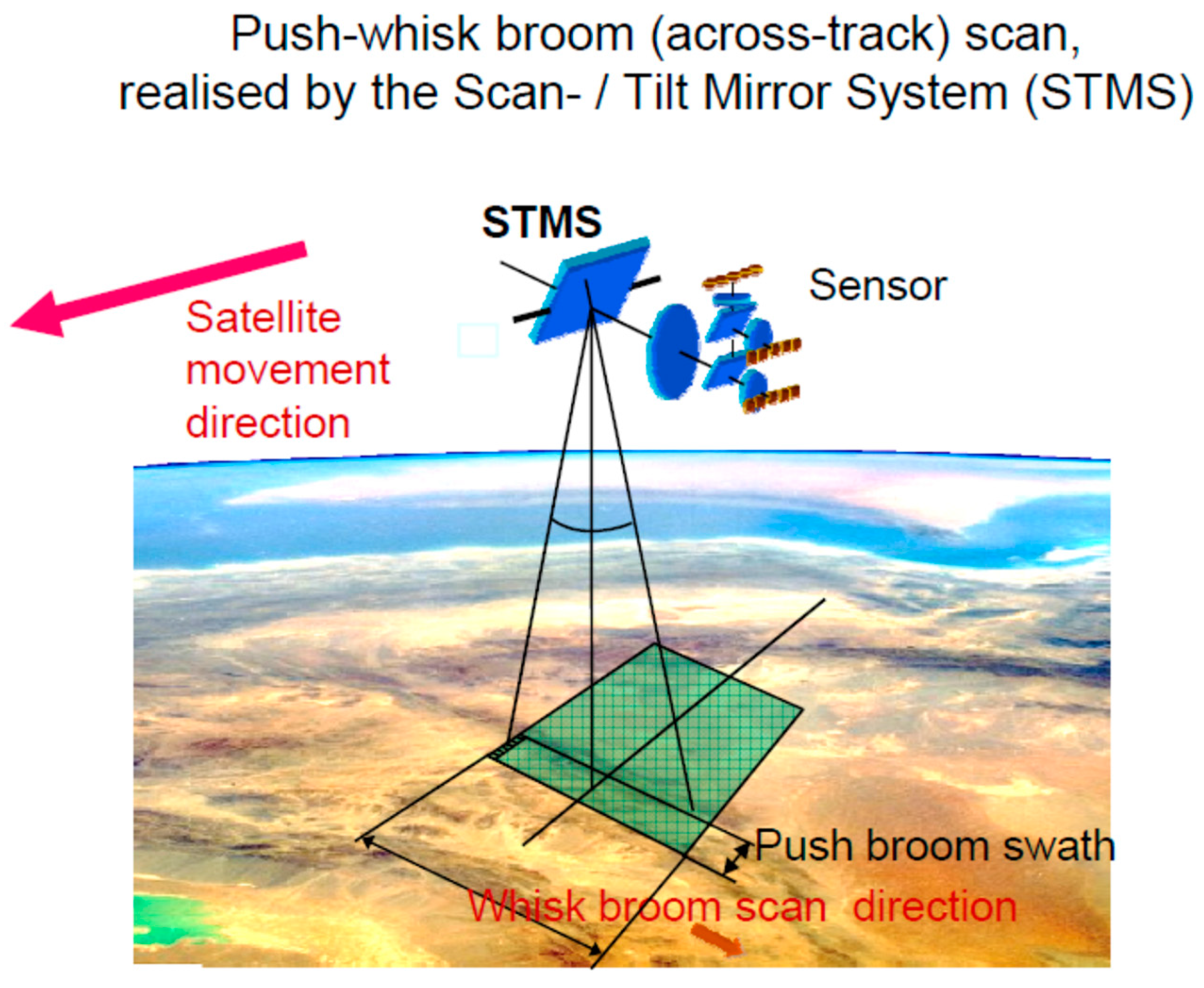
| Satellite agility | Across-track tilt (up to +/− 30°) of the sensor’s Line of Sight (LoS) must be initiated at least one orbit before the observation | Across- or along-track tilt of the sensor’s Line of Sight (LoS) by 30° in 10 s using three High-Torque Wheels (HTW) | Very fast across- and/or along-track tilt of the sensor’s Line of Sight (LoS) using three HTWs and a Scan/Tilt Mirror System to change the “sampling mode”. This will allow us to tilt the sensor’s LoS to different Areas of Surveillance (AoS), or to conduct wide-swath scanning. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fischer, C.; Halle, W.; Säuberlich, T.; Frauenberger, O.; Hartmann, M.; Oertel, D.; Terzibaschian, T. Small Satellite Tools for High-Resolution Infrared Fire Monitoring. J. Imaging 2022, 8, 49. https://doi.org/10.3390/jimaging8020049
Fischer C, Halle W, Säuberlich T, Frauenberger O, Hartmann M, Oertel D, Terzibaschian T. Small Satellite Tools for High-Resolution Infrared Fire Monitoring. Journal of Imaging. 2022; 8(2):49. https://doi.org/10.3390/jimaging8020049
Chicago/Turabian StyleFischer, Christian, Winfried Halle, Thomas Säuberlich, Olaf Frauenberger, Maik Hartmann, Dieter Oertel, and Thomas Terzibaschian. 2022. "Small Satellite Tools for High-Resolution Infrared Fire Monitoring" Journal of Imaging 8, no. 2: 49. https://doi.org/10.3390/jimaging8020049
APA StyleFischer, C., Halle, W., Säuberlich, T., Frauenberger, O., Hartmann, M., Oertel, D., & Terzibaschian, T. (2022). Small Satellite Tools for High-Resolution Infrared Fire Monitoring. Journal of Imaging, 8(2), 49. https://doi.org/10.3390/jimaging8020049