A New Pseudo-Spectral Method Using the Discrete Cosine Transform


Abstract
1. Introduction
2. Preliminaries
2.1. Definitions of DFT, DCT-1, and DCT-2
2.2. Relation between DFT and DCT
2.3. PS Method Using the DFT
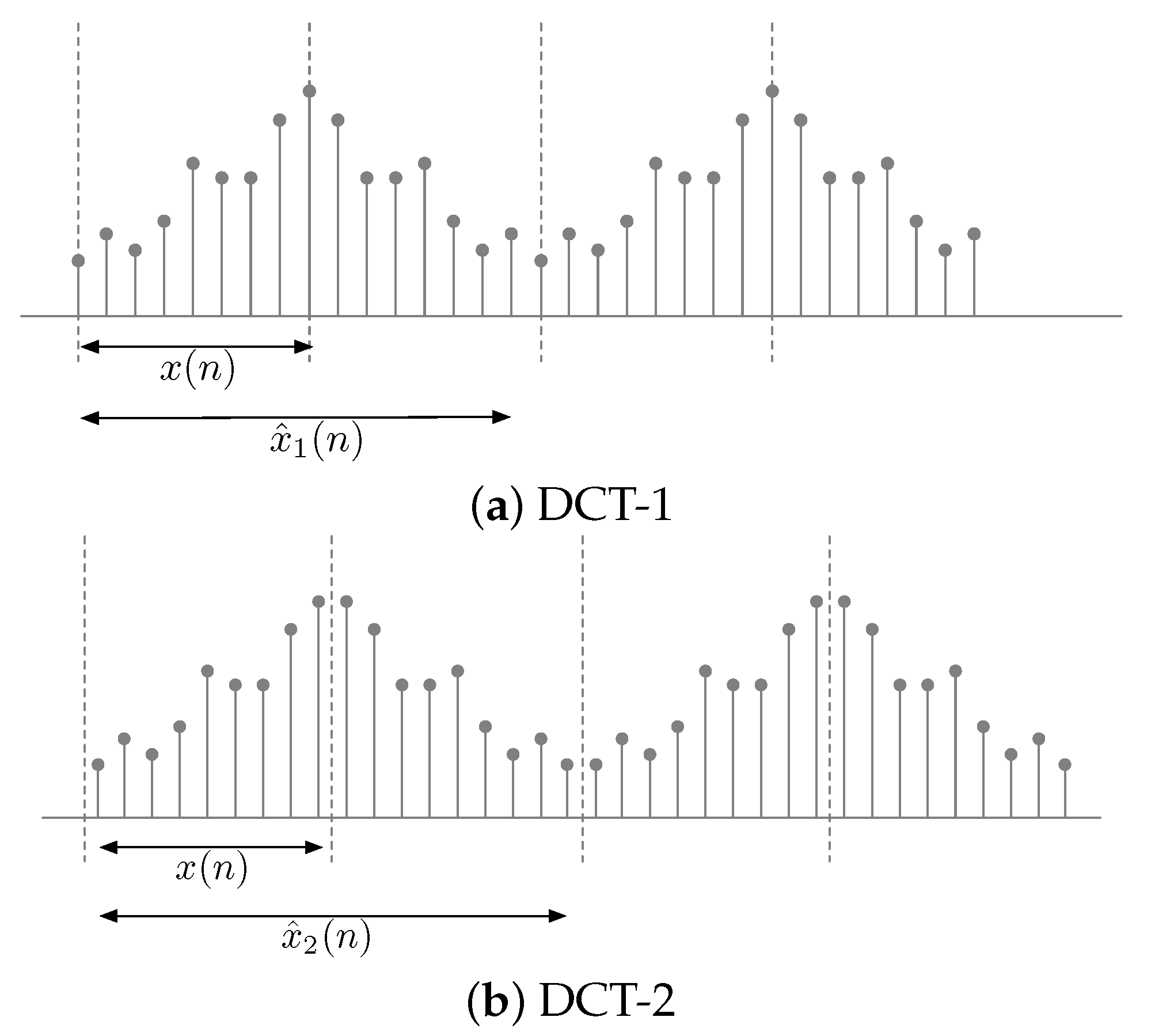
3. PS Method Based on Symmetric Extension
3.1. Derivation of PS-DCT1
3.2. Derivation of PS-DCT2
3.3. Implementing PS-DCT1/PS-DCT2
3.4. Extension to Second and Higher Derivatives
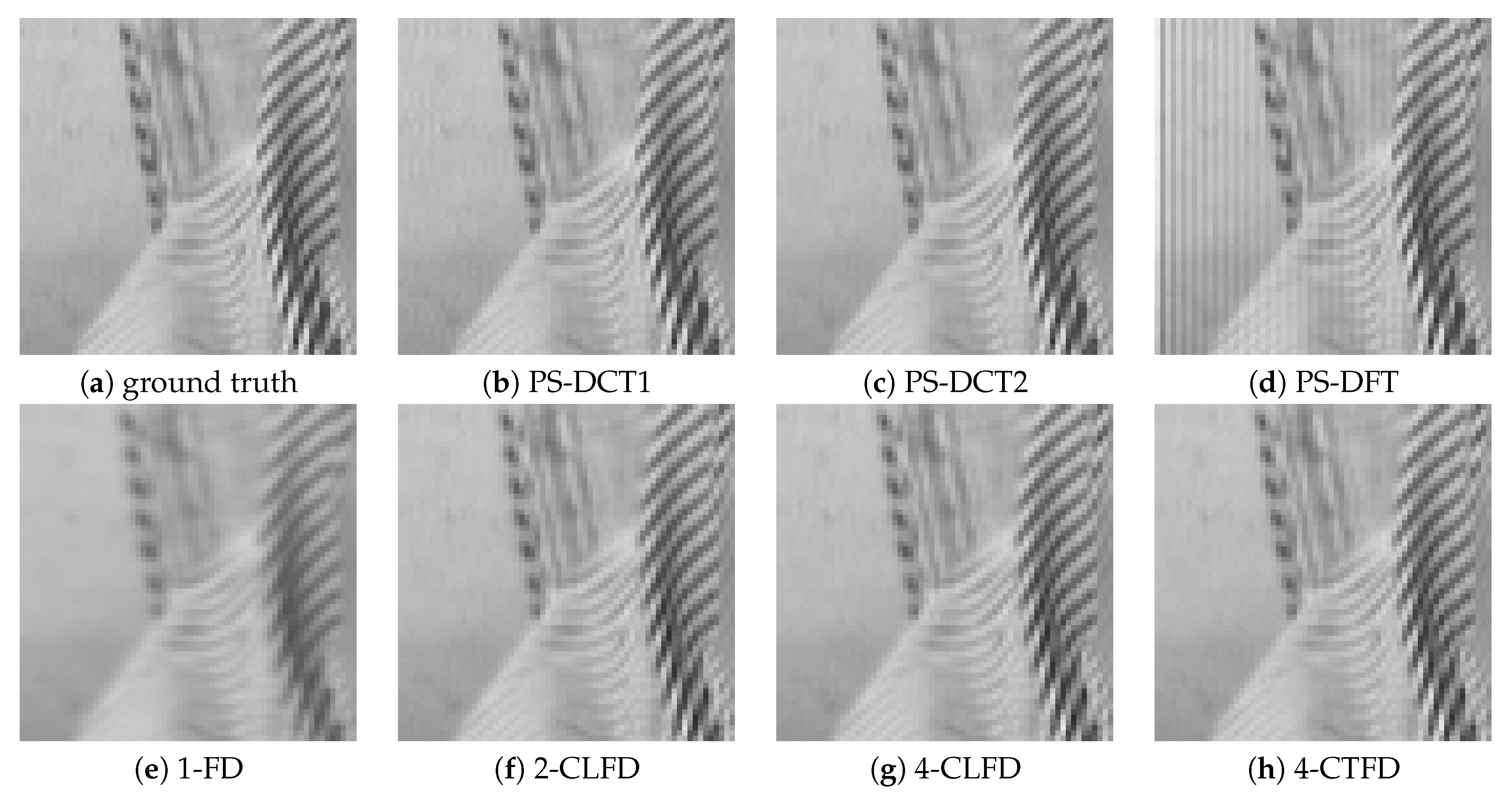
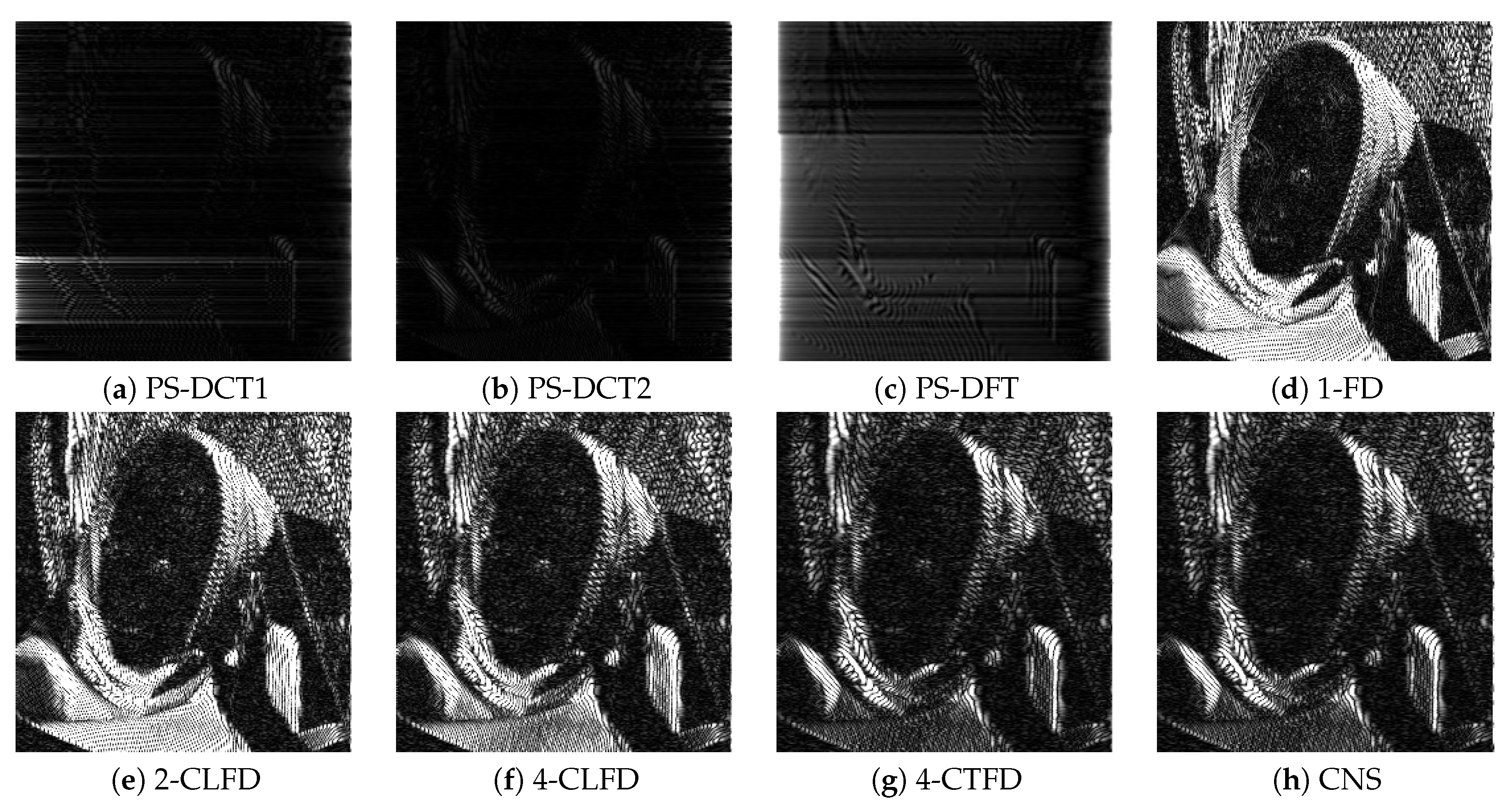
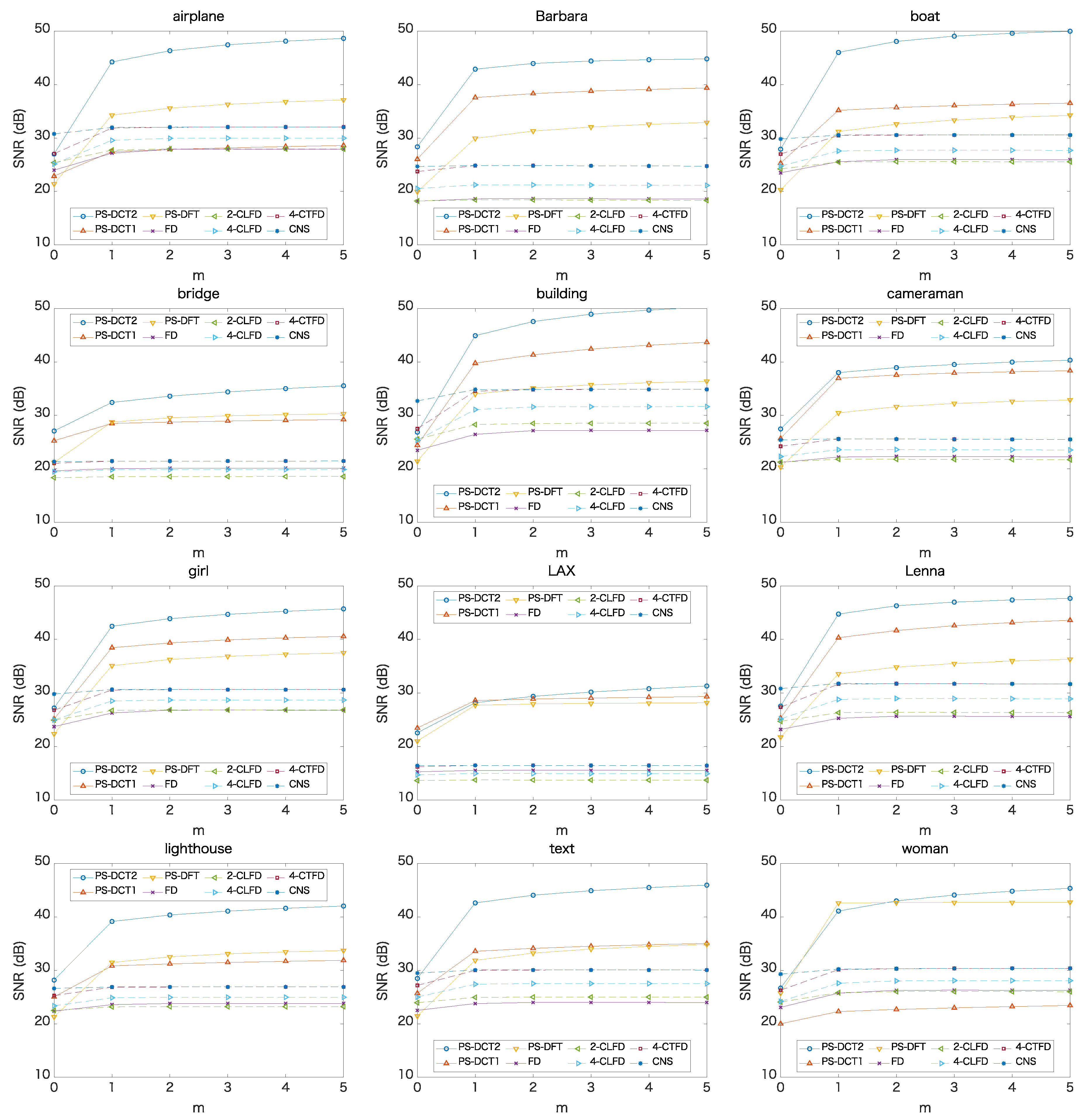
4. Application to Image Interpolation
4.1. Hermite Interpolation
4.2. Methods and Environment
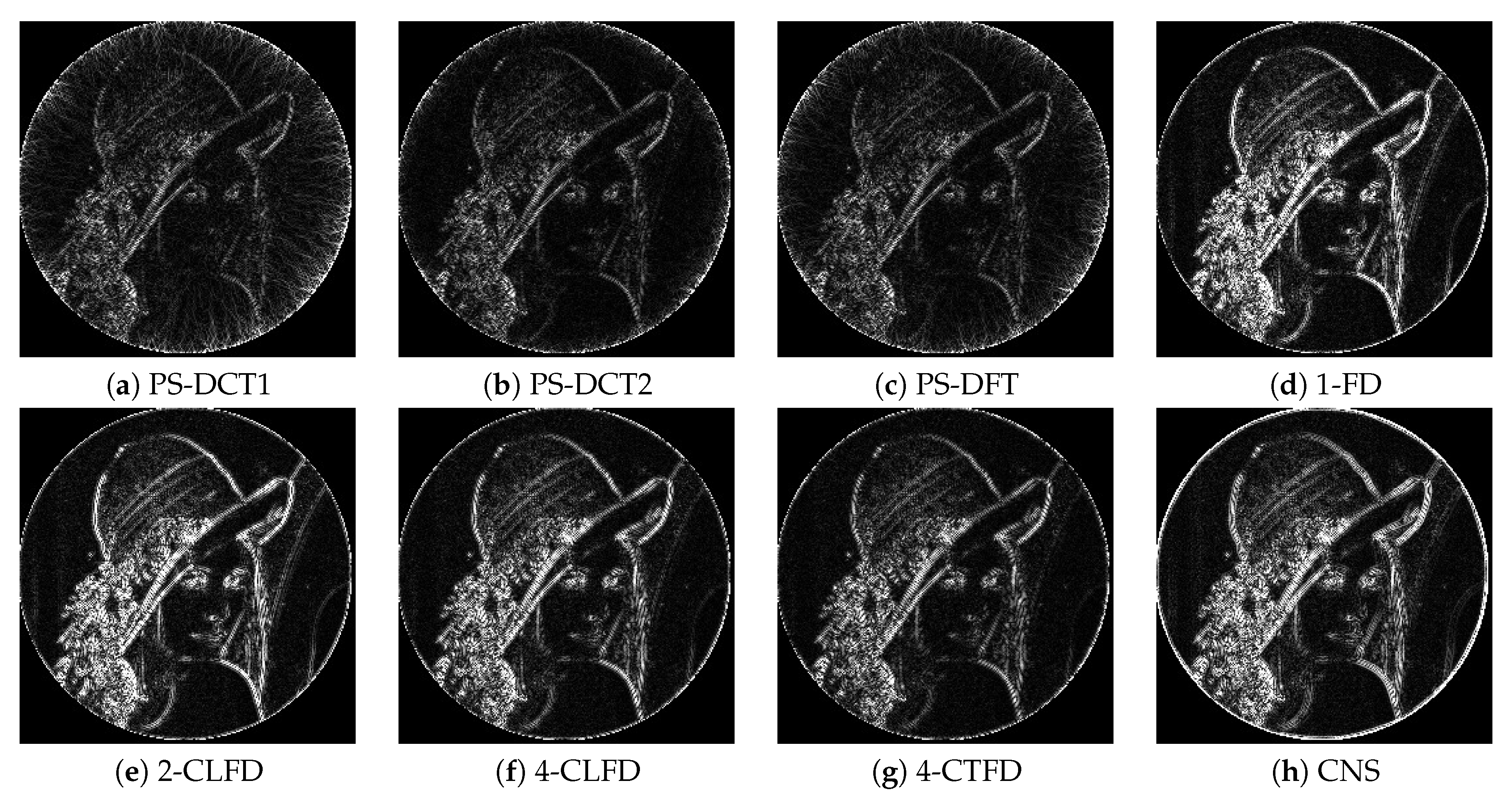
4.3. Image Translation
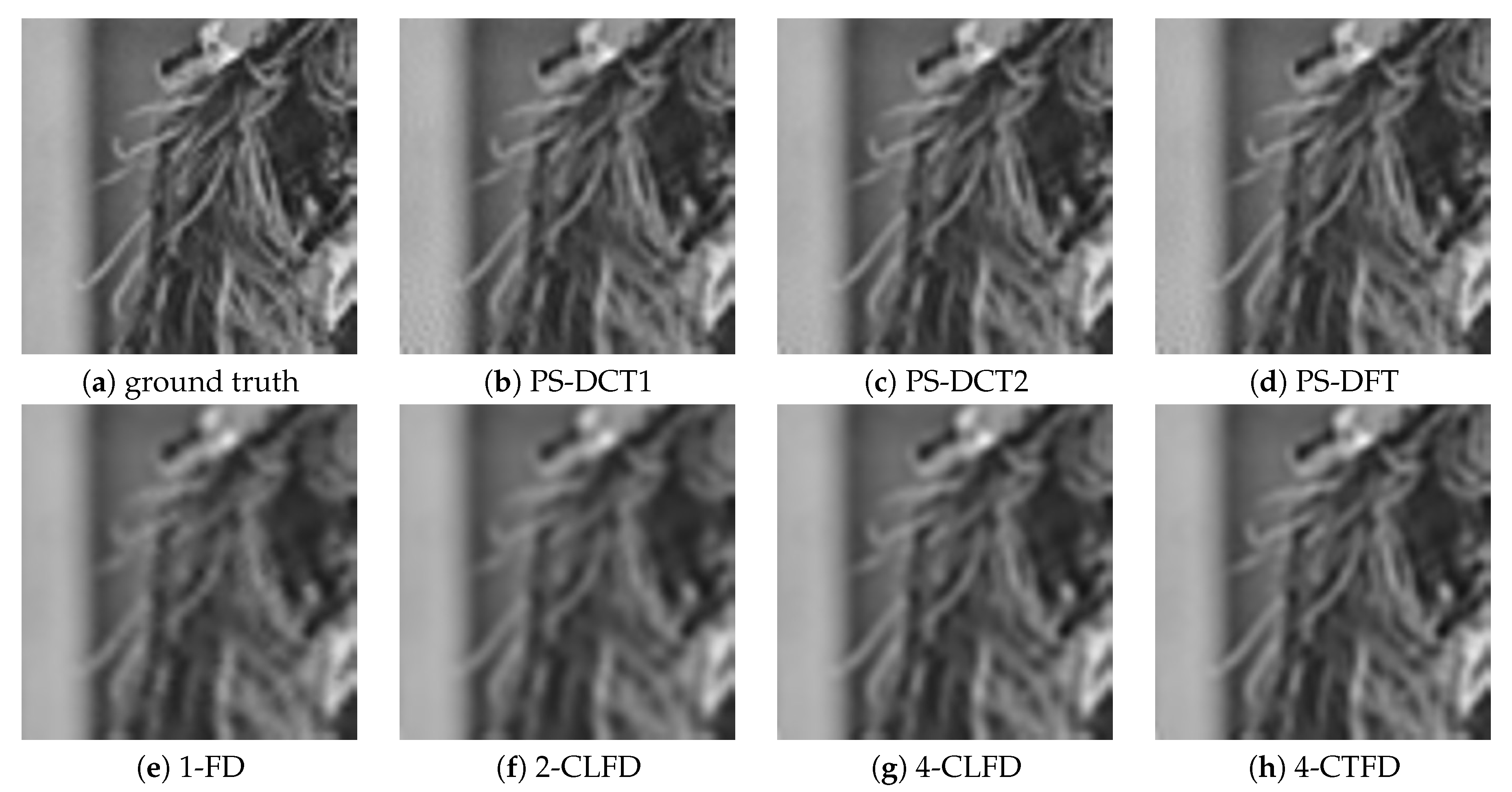
4.4. Image Rotation
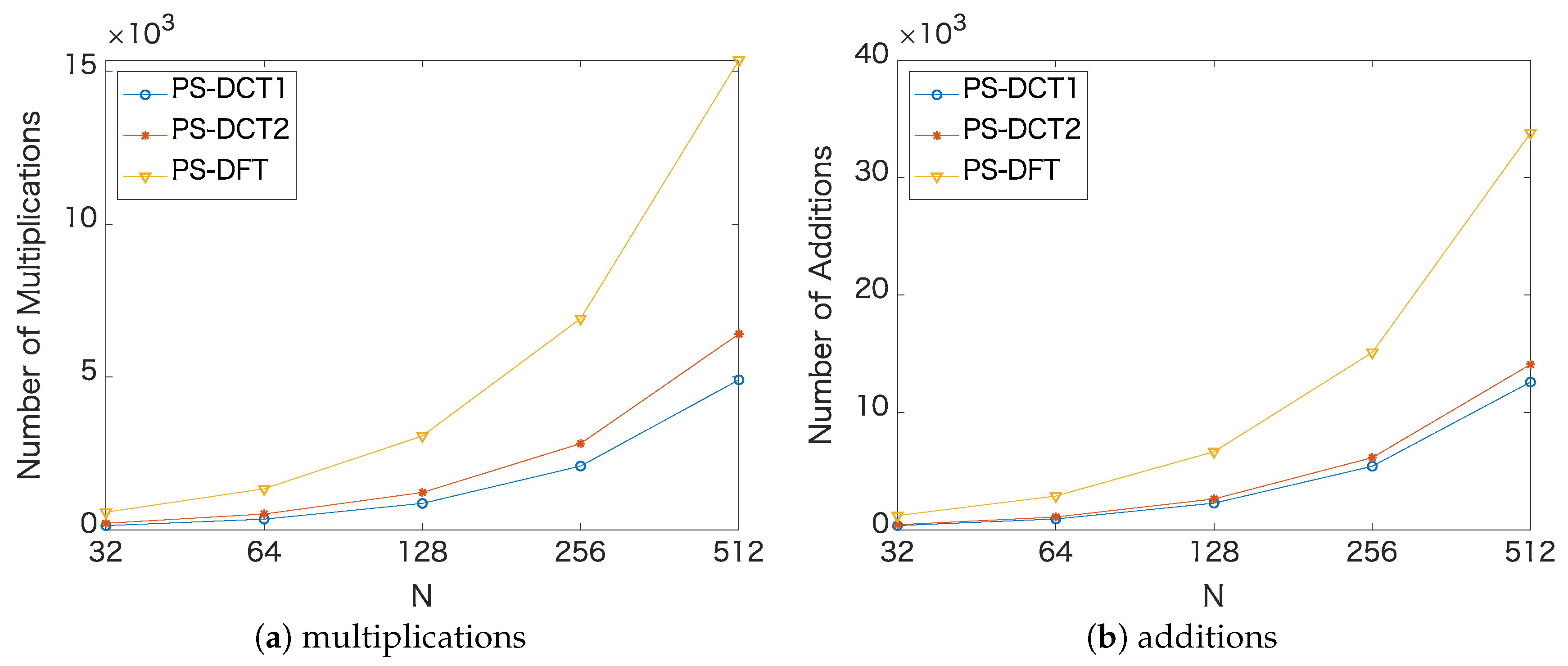
4.5. Computational Complexity
5. Conclusions
Funding
Conflicts of Interest
References
- Rao, K.R.; Yip, P. Discrete Cosine Transform; Academic Press. Inc.: Boston, MA, USA, 1990. [Google Scholar]
- Martucci, S.A. Symmetric convolution and the discrete sine and cosine transforms. IEEE Trans. Signal Process. 1994, 42, 1038–1051. [Google Scholar] [CrossRef]
- Reeves, R.; Kubik, K. Shift, scaling and derivative properties for the discrete cosine transform. Signal Process. 2006, 86, 1597–1603. [Google Scholar] [CrossRef][Green Version]
- Long, B.; Reinhard, E. Real-time fluid simulation using discrete sine/cosine transforms. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 643–660. [Google Scholar]
- Bhat, P.; Curless, B.; Cohen, M.; Zitnick, C.L. Fourier analysis of the 2D screened poisson equation for gradient domain problems. In European Conference on Computer Vision; ECCV Part II LNCS; Springer: Berlin/Heidelberg, Germany, 2008; Volume 5303, pp. 114–128. [Google Scholar]
- Kreiss, H.-O.; Oliger, J. Comparison of accurate methods for the integration of hyperbolic equations. Tellus 1972, 24, 199–215. [Google Scholar] [CrossRef]
- Orzag, S.A. Comparison of pseudospectral and spectral approximation. Appl. Math. 1972, L1, 253–259. [Google Scholar] [CrossRef]
- Fornberg, F. A Practical Guide to Pseudospectral Methods; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Elnagar, G.N.; Kazemi, M.A.; Razzaghi, M. The pseudospectral Legendre method for discretizing optimal control problems. IEEE Trans. Autom. Control 1995, 40, 1793–1796. [Google Scholar] [CrossRef]
- Fahroo, F.; Ross, I.M. Costate estimation by a Legendre pseudospectral method. J. Guidance Control Dyn. 2001, 24, 270–277. [Google Scholar] [CrossRef]
- Elnagar, G.N.; Kazemi, M.A. Pseudospectral Chebyshev optimal control of constrained nonlinear dynamical systems. Comput. Optim. Appl. 1998, 11, 195–217. [Google Scholar] [CrossRef]
- Roache, P.J. A pseudo-spectral FFT technique for non-periodic problems. J. Comput. Phys. 1978, 27, 204–220. [Google Scholar] [CrossRef]
- Canuto, C.; Hussaini, M.Y.; Quarteroni, A.; Zang, T.A. Spectral Methods in Fluid Dynamics; Springer: New York, NY, USA, 1988. [Google Scholar]
- Takata, M.; Yamamoto, Y.; Shouno, H.; Kunugi, T.; Joe, K. Parallelization and evaluation of a direct numerical simulation for a turbulent flow using pseudo spectral method. IPSJ J. 2003, 44, 45–54. (In Japanese) [Google Scholar]
- Yoon, S.; Kim, J.; Choi, W. An explicit data assimilation scheme for a nonlinear wave prediction model based on a pseudo-spectral method. IEEE J. Ocean. Eng. 2016, 41, 112–122. [Google Scholar]
- Paparella, F.; Bacelli, G.; Paulmemo, A.; Mouring, S.E.; Ringwood, J.V. Multibody modelling of wave energy converters using pseudo-spectral methods with application to a three-body hinge-barge device. IEEE Trans. Sustain. Energy 2016, 7, 966–974. [Google Scholar] [CrossRef]
- Das, S.; Chen, X.; Hobson, M.P. Fast GPU-based seismogram simulation from microseismic events in marine environments using heterogeneous velocity models. IEEE Trans. Comput. Imaging 2017, 3, 316–329. [Google Scholar] [CrossRef][Green Version]
- Smith, G.D. Numerical Solution of Partial Derivative Equations: Finite Difference Methods; Oxford University Press: Oxford, UK, 1986. [Google Scholar]
- Szegö, G. Orthogonal Polynomials; American Mathematical Society: Providence, RI, USA, 1939. [Google Scholar]
- Seta, R.; Okubo, K.; Tagawa, N. Digital image interpolation method using higher-order Hermite interpolating polynomials with compact finite-difference. In Proceedings of the 2009 APSIPA Annual Summit and Conference, Sapporo, Japan, 4–7 October 2009. [Google Scholar]
- Takamiya, K.; Okubo, K.; Tagawa, N. High accuracy image interpolation method combining higher-order Hermite interpolation with pseudo spectral method. IEICE Trans. Commun. 2012, J95-Bo.2, 355–365. (In Japanese) [Google Scholar]
- Ito, I. Pseudo spectrum method based on symmetric extension. In Proceedings of the 7th European Workshop on Visual Information Processing, Tampere, Finland, 26–28 Novober 2018; p. 29. [Google Scholar]
- Oppenheim, A.V.; Schafer, R.W.; Buck, J.R. Discrete-Time Signal Processing; Prentice Hall: New Jersey, NJ, USA, 1999. [Google Scholar]
- Lele, S.K. Compact finite difference schemes with spectral-like resolution. J. Comput. Phys. 1992, 103, 16–42. [Google Scholar] [CrossRef]
- Standard Image Data BAse. Available online: http://www.ess.ic.kanagawa-it.ac.jp/app_images_j.html (accessed on 27 March 2020).
- Wang, Z. Fast algorithms for the discrete W transform and for the discrete Fourier transform. IEEE Trans. Accoust. Speech Signal Process. 1984, 32, 803–816. [Google Scholar] [CrossRef]
- Nussbaumer, H.J. Fast Fourier Transform and Convolution Algorithms; Springer: Berlin, Germany, 1982. [Google Scholar]
- Nakayama, K. A new discrete Fourier transform algorithm using butterfly structure fast convolution. IEEE Trans. Acoust. Speech Signal Process. 1985, ASSP-33, 1197–1208. [Google Scholar] [CrossRef]
- Rossi, P.S.; Ciuonzo, D.; Ekman, T.; Dong, H. Energy detection for MIMO decision fusion in underwater sensor networks. IEEE Sens. J. 2014, 15, 1630–1640. [Google Scholar] [CrossRef]
- Devaney, A.J.; Marengo, E.A.; Gruber, F.K. Time-reversal-based imaging and inverse scattering of multiply scattering point targets. J. Acoust. Soc. Am. 2005, 118, 3129–3138. [Google Scholar] [CrossRef]
- Ciuonzo, D. On time-reversal imaging by statistical testing. IEEE Signal Process. Lett. 2017, 24, 1024–1028. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Interpolation | CHI | CNS | ||||||
|---|---|---|---|---|---|---|---|---|
| Derivative | PS-DCT1 | PS-DCT2 | PS-DFT | 1-FD | 2-CLFD | 4-CLFD | 4-CTFD | – |
| airplane | 22.87 | 27.00 | 21.40 | 23.99 | 25.40 | 25.14 | 27.05 | 30.77 |
| Barbara | 26.05 | 28.36 | 19.95 | 18.18 | 18.21 | 20.54 | 23.74 | 24.68 |
| boat | 25.29 | 27.91 | 20.29 | 23.49 | 24.21 | 24.73 | 27.00 | 29.82 |
| bridge | 25.25 | 27.08 | 21.17 | 19.63 | 18.34 | 19.45 | 21.04 | 21.35 |
| building | 24.43 | 26.86 | 21.41 | 23.46 | 25.55 | 25.36 | 27.50 | 32.70 |
| cameraman | 25.68 | 27.46 | 20.31 | 21.20 | 21.26 | 22.30 | 24.22 | 25.40 |
| girl | 25.14 | 27.20 | 22.35 | 23.71 | 24.94 | 24.97 | 26.79 | 29.81 |
| LAX | 23.45 | 22.55 | 21.01 | 15.24 | 13.61 | 14.69 | 16.20 | 16.41 |
| Lenna | 25.31 | 27.56 | 21.74 | 23.19 | 24.71 | 25.15 | 27.35 | 30.84 |
| lighthouse | 25.03 | 28.19 | 21.28 | 22.36 | 22.50 | 23.37 | 25.28 | 26.63 |
| text | 25.72 | 28.49 | 21.45 | 22.52 | 23.95 | 25.01 | 27.19 | 29.50 |
| woman | 20.01 | 26.69 | 25.73 | 23.08 | 24.08 | 24.19 | 26.29 | 29.31 |
| average | 24.52 | 27.11 | 21.51 | 21.67 | 22.23 | 22.91 | 24.97 | 27.27 |
| Interpolation | CHI | CNS | ||||||
|---|---|---|---|---|---|---|---|---|
| Derivative | PS-DCT1 | PS-DCT2 | PS-DFT | 1-FD | 2-CLFD | 4-CLFD | 4-CTFD | – |
| airplane | 27.46 | 44.24 | 34.28 | 27.16 | 27.74 | 29.57 | 31.86 | 31.98 |
| Barbara | 37.58 | 42.89 | 29.93 | 18.62 | 18.43 | 21.24 | 24.84 | 24.86 |
| boat | 35.18 | 46.02 | 31.21 | 25.56 | 25.51 | 27.58 | 30.48 | 30.56 |
| bridge | 28.49 | 32.42 | 28.76 | 20.04 | 18.52 | 19.82 | 21.44 | 21.44 |
| building | 39.77 | 44.92 | 33.99 | 26.45 | 28.28 | 31.09 | 34.54 | 34.85 |
| cameraman | 36.95 | 38.01 | 30.47 | 22.20 | 21.80 | 23.58 | 25.58 | 25.60 |
| girl | 38.43 | 42.45 | 35.13 | 26.27 | 26.75 | 28.52 | 30.57 | 30.66 |
| LAX | 28.60 | 28.19 | 27.72 | 15.52 | 13.73 | 14.94 | 16.46 | 16.46 |
| Lenna | 40.30 | 44.73 | 33.60 | 25.27 | 26.31 | 28.80 | 31.67 | 31.79 |
| lighthouse | 30.84 | 39.16 | 31.48 | 23.59 | 23.17 | 24.88 | 26.87 | 26.90 |
| text | 33.58 | 42.63 | 31.88 | 23.79 | 24.95 | 27.42 | 30.01 | 30.08 |
| woman | 22.30 | 41.11 | 42.62 | 25.74 | 25.83 | 27.61 | 30.15 | 30.24 |
| average | 33.29 | 40.57 | 32.59 | 23.35 | 23.42 | 25.42 | 27.87 | 27.95 |
| Interpolation | CHI | CNS | ||||||
|---|---|---|---|---|---|---|---|---|
| Derivative | PS-DCT1 | PS-DCT2 | PS-DFT | 1-FD | 2-CLFD | 4-CLFD | 4-CTFD | – |
| airplane | 30.15 | 31.66 | 30.85 | 25.54 | 25.51 | 27.16 | 28.69 | 24.83 |
| Barbara | 27.14 | 27.82 | 27.41 | 18.80 | 18.65 | 20.55 | 22.86 | 19.16 |
| boat | 31.42 | 33.55 | 32.37 | 26.71 | 26.69 | 28.30 | 30.07 | 25.60 |
| bridge | 22.36 | 22.58 | 22.46 | 18.21 | 18.14 | 19.07 | 20.01 | 18.33 |
| building | 30.02 | 31.86 | 30.68 | 24.67 | 24.64 | 26.73 | 28.58 | 24.14 |
| cameraman | 26.83 | 27.52 | 27.14 | 21.29 | 21.25 | 22.76 | 24.16 | 21.42 |
| girl | 29.27 | 30.34 | 29.43 | 24.79 | 24.77 | 26.41 | 27.77 | 24.60 |
| LAX | 18.42 | 18.49 | 18.46 | 14.47 | 14.42 | 15.20 | 16.02 | 14.73 |
| Lenna | 30.30 | 31.79 | 30.90 | 24.91 | 24.88 | 26.70 | 28.49 | 24.50 |
| lighthouse | 24.55 | 24.95 | 24.72 | 19.60 | 19.53 | 20.65 | 21.72 | 19.68 |
| text | 25.86 | 26.49 | 26.03 | 20.34 | 20.26 | 21.83 | 23.23 | 20.40 |
| woman | 30.93 | 32.28 | 31.44 | 26.46 | 26.46 | 27.99 | 29.43 | 25.90 |
| average | 27.27 | 28.28 | 27.66 | 22.15 | 22.10 | 23.61 | 25.09 | 21.94 |
| Method | Multiplications | Additions |
|---|---|---|
| PS-DCT1 | ||
| PS-DCT2 | ||
| PS-DFT |
| Method | Translation | Rotation |
|---|---|---|
| CHI-PS-DCT1 | 0.058 | 0.436 |
| CHI-PS-DCT2 | 0.052 | 0.417 |
| CHI-PS-DFT | 0.037 | 0.391 |
| CHI-1-FD | 0.019 | 0.357 |
| CHI-2-CLFD | 0.021 | 0.362 |
| CHI-4-CLFD | 0.024 | 0.372 |
| CHI-4-CTFD | 1.455 | 3.207 |
| CNS | 3.399 | 92.866 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ito, I. A New Pseudo-Spectral Method Using the Discrete Cosine Transform. J. Imaging 2020, 6, 15. https://doi.org/10.3390/jimaging6040015
Ito I. A New Pseudo-Spectral Method Using the Discrete Cosine Transform. Journal of Imaging. 2020; 6(4):15. https://doi.org/10.3390/jimaging6040015
Chicago/Turabian StyleIto, Izumi. 2020. "A New Pseudo-Spectral Method Using the Discrete Cosine Transform" Journal of Imaging 6, no. 4: 15. https://doi.org/10.3390/jimaging6040015
APA StyleIto, I. (2020). A New Pseudo-Spectral Method Using the Discrete Cosine Transform. Journal of Imaging, 6(4), 15. https://doi.org/10.3390/jimaging6040015