1. Introduction
In this paper, we use multi-camera video analytic methods to design a system that recognizes hand-hygiene actions for food safety. Food safety is a discipline that describes scientific methods to prevent contamination and foodborne illness at different stages of food production. The stages include, but are not limited to, food handling, food storage, equipment cleaning, and staff hygiene. In recent years, where the burden of foodborne illnesses is increasing, evidence indicates that the majority of food contamination is caused by inappropriate food manufacturing practices, involving workers with poor food handling skills [
1]. Therefore, we consider video monitoring combined with video-analytic methods for food handling evaluation to be a fast and cost-efficient way to do self-assessment for food growers, processors, and/or handlers.
In food handling, there are many steps to achieve good manufacturing practices (GMPs). Hand-hygiene is one of the most critical steps. Effective hand-hygiene can reduce food contamination by human pathogens, since this step reduces the likelihood that food handlers harbor pathogenic microorganisms on their hands and transfer them to food products [
2]. According to the World Health Organization, there are 12 steps [
3] a person should follow to perform effective hand-hygiene. As illustrated in
Figure 1, the basic steps include: rinse hands, apply soap, rub hands with a variety of different motions, and dry hands. Our goal here was to use cameras to monitor hand-hygiene activities, to automatically identify both positive activities (like those in the figure) and mistakes that either prevent complete decontamination or lead to re-contamination. These mistakes include not rubbing the hands for the required amount of time, touching the faucet with the hands after washing, and not drying the hands.
There has recently been significant progress in automated methods for analyzing video content, a process called video analytics. Stationary cameras placed in a so-called third-person perspective have been used for surveillance, person and vehicle detection and re-identification, activity recognition, and anomaly detection. When recognizing activities of a person, third-person cameras have the advantage of viewing actions from the side view. First-person, or egocentric cameras are mounted on the person performing the activity, often on their head or chest [
4]. These cameras have the advantage of viewing the person’s hands and any objects being manipulated, and are particularly useful to observe subtle hand motions and small objects. However, because they are mounted on a person, these cameras often move chaotically as the person moves. As a result, they may not capture the desired activities, and video processing methods like background subtraction and camera calibration become more difficult [
4].
Recognizing activities in videos is a rapidly growing field with wide-ranging applications. Activity recognition techniques have been developed for both trimmed, and untrimmed videos. For trimmed videos, the task is to identify which isolated activity happens in a video clip that has been trimmed to contain only a single activity. For untrimmed videos, the task is not only to recognize the target action, but also to localize it temporally within the clip that may contain unrelated background actions. This process is termed temporal action localization and is often addressed by identifying temporal action proposals [
5,
6,
7]. In this paper, we are interested in processing untrimmed videos.
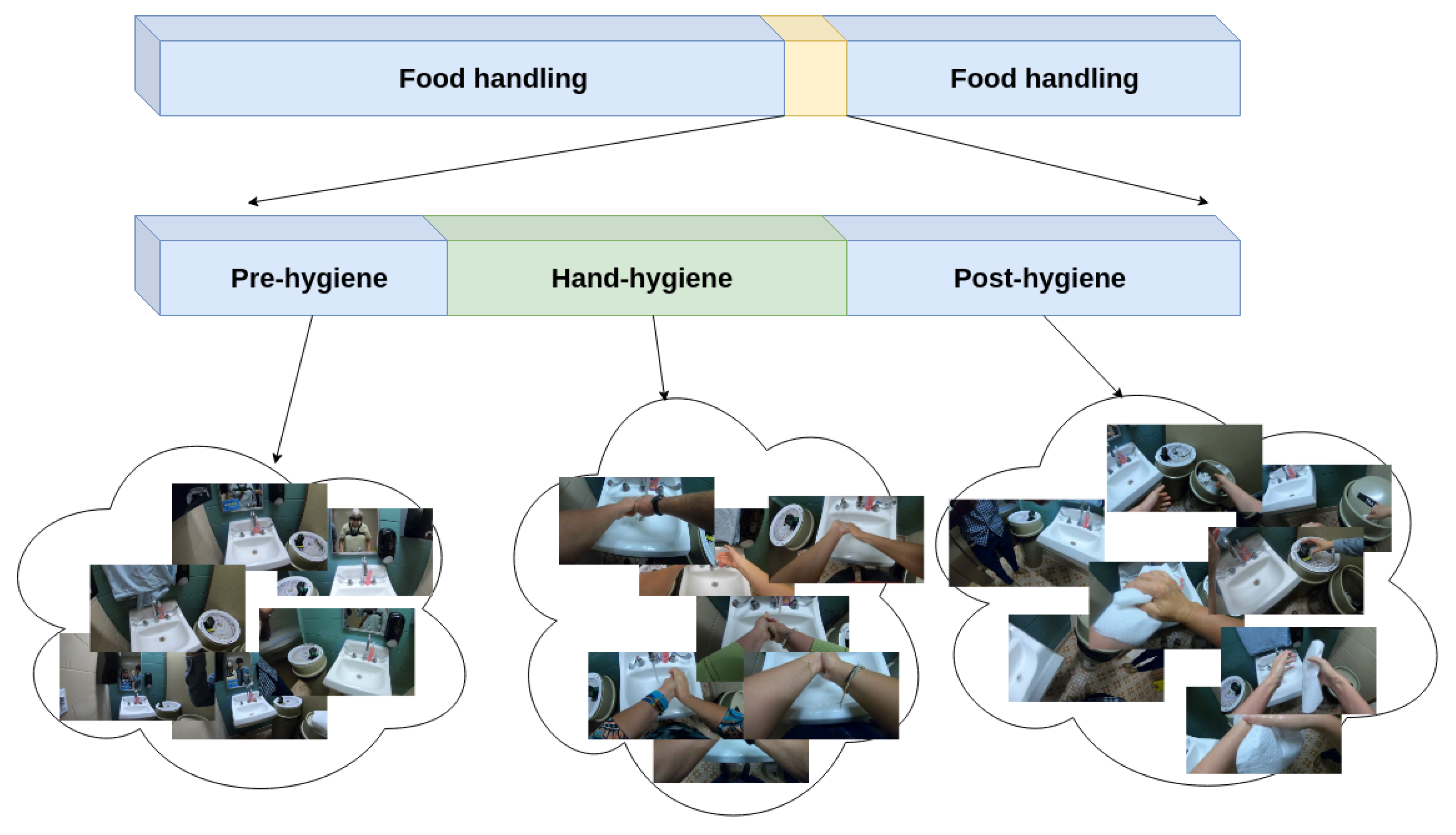
Figure 2 demonstrates the time-line of hand hygiene within an untrimmed clip that observes the overall process of food handling. Within a period of food handling, which typically lasts at least an hour, hand-hygiene can happen at any time. The yellow period in the figure illustrates when the participant is near the handwashing sink, an obvious requirement for doing hand-hygiene. However, even when they are near the sink, they may not yet be doing hand-hygiene actions. Therefore, we further subdivide the yellow period into three periods as shown in the middle of
Figure 2. In the first
pre-hygiene period, before the participant engages in hand-hygiene, they are near the sink but may be doing any non-hygiene activities. During the second
hand-hygiene period, the participant stands in front of the sink and performs hand-hygiene actions such as rubbing hands and applying soap. During this period, the participant is likely to stand relatively still and perform one hand-hygiene action after another. Finally, in the third
post-hygiene period, the participant is likely to move away from the sink and look for a paper towel to dry their hands. Thus, actions occurring in this final period may be a combination of non-hygiene actions and “dry hands”.
Our goal was to design an automated video system that processes untrimmed video to assess the effectiveness of hand-hygiene activities. From the observations of
Figure 2, we can recognize that such a system must operate on untrimmed video and quickly identify the narrow time period that actually contains hand-hygiene actions. Therefore, our two overarching design principles are first, to use the most informative camera location to identify each action, and second, to reduce the computational expense without sacrificing accuracy.
In this paper, we propose a framework to recognize hand-hygiene actions inside untrimmed video sequences with the following contributions:
We define different levels of tasks for hand-hygiene action recognition, according to their detection difficulty. In this paper, we focus on recognizing standard-level hand-hygiene actions.
We record our own hand-hygiene action data set with 100 participants using three camera views.
We compare and evaluate the performance of deep-learning models on three different camera views to recognize trimmed hand-hygiene action video clips. We select the best two camera views for our final system design.
We empirically explore the required complexity of a CNN model when applied to recognize our selected types of hand-hygiene actions. These empirical evaluation results enable us to deploy appropriate models for our final system.
We propose a two-stage framework to recognize hand-hygiene actions from untrimmed video sequences. We combine two camera views to localize and recognize hand-hygiene actions. Taking advantage of the static third-person view camera, we use a low-complexity CNN model to localize the hand-hygiene period within an untrimmed video. Then we apply more complex CNN models to recognize the actual hand-hygiene action types within these candidate locations.
Comparing our two-stage system and a baseline system on untrimmed video sequences, we demonstrate that with the support of low-complexity CNN models, our two-stage system achieves nearly equivalent performance by only processing of the frames in the untrimmed video. In contrast, the baseline system must process of the frames.
These contributions are relative to our previous work [
8], the state-of-the-art in hand-hygiene recognition. There, we introduced the problem of recognizing hand-hygiene actions in egocentric video and introduced one method to address this problem using a single chest-mounted camera. This current work extends our previous work [
8] in three main ways. First, we extend hand-hygiene action recognition from solely using egocentric video into a combination of using both egocentric and third-person video. This extension gives us the ability to use a third-person video to effectively localize hand-hygiene temporal regions in untrimmed video, and to recognize each hand-hygiene action with its “expert” camera view. Second, we characterize untrimmed hand-hygiene videos into three temporal periods: pre-hygiene, hand-hygiene, and post-hygiene. Each period includes specific action types, where the majority hand-hygiene actions happen in the hand-hygiene period. To efficiently localize the hand-hygiene period from untrimmed video, we propose to apply a CNN model with a simple architecture to quickly process the untrimmed video to produce candidate temporal regions. Then, we apply a more complex CNN model that only processes these candidates. Third, we introduce our new assessment method toward hand-hygiene action recognition. Due to the special nature of our task, it is not necessary to estimate the duration of all the activities. Instead, for some hand-hygiene action types, we just need to verify that they happened. Thus, in our final result, we evaluate the performance of our system with two different standards.
In
Section 2, we introduce previous work on activity recognition from third-person videos and from egocentric videos. In
Section 3, we introduce our hand-hygiene data set with three camera views, and describe how it is collected and labeled. We also define the different levels of tasks for hand-hygiene activity recognition. In
Section 4, we introduce the overview of our proposed two-stage system. In
Section 5, we describe our experiment on evaluating deep learning model performance on trimmed action clips. In
Section 6, we evaluate the performance of the entire system. In
Section 7, we conclude our work with a brief discussion and summary.
2. Related Work
In this paper, our goal is to identify the hand-hygiene steps a user performs within an untrimmed input video. Due to the nature of hand-hygiene activities, highly salient aspects that distinguish hand-hygiene from non-hygiene actions are the person’s hand and arm movements. In addition, different types of hand-hygiene actions have distinctly different motion strength and body parts involved, and these aspects provide important clues to distinguish actions. Therefore, in this section we provide an overview of prior work in activity recognition using computer vision.
Activity recognition focuses on detecting the events inside a video clip and categorizing each into its activity category [
9]. Traditionally, researchers were interested in using a detector to identify key points among video clips and construct salient information around these locations [
10,
11]. One of the most representative methods that follows this methodology is the Improved Dense Trajectory (IDT) [
12], which created track points based on dense optical flow across time, and extracted HOG, HOF and MBH features around these salient points. In order to describe complex action types which might have various durations across time, they trained a codebook combined with a linear SVM classifier to make the final prediction. The algorithm achieved the state-of-art in many third-person data sets.
However, in recent years, methods based on deep learning have largely replaced these traditional methods. In general, because traditional hand-crafted feature extraction algorithms are designed by human experts, it is difficult to customize them to different applications. In contrast, deep learning methods can overcome this limitation by using sufficient training data to learn “customized” features. Convolutional neural network models (CNNs) such as AlexNet [
13], VGGNet [
14], and ResNet [
15] apply single 2D images for image classification tasks. Other structures such as long short-term memory (LSTM) [
16], two-stream networks [
17], two-layer discriminative model [
18], CNN-BLSTM network embedded into HMM [
19], and PI-based RNN [
20] extend the input from spatial information to a combination of spatial and temporal information, which extends the application field of CNN models to video classification. 3D convolutional neural networks have also been applied for action recognition, including C3D [
21], I3D [
22], T3D [
23], and P3D [
24]. For long untrimmed videos that contain multi-type actions, the multi-stage temporal convolutional network (MS-TCN) [
25] is able to segment different actions temporally.
However, for actions related to hand motions, which are prevalent in hand-hygiene activities, using an LSTM has been shown to be less effective. Köpüklü et al. [
26] compare multiple spatiotemporal modeling techniques in combination with 2D CNN in the context of the Jester-V1 [
27] and Something-Something-V2 [
28] datasets. The result indicates simpler structures such as Multilayer Perceptron (MLP) and Fully Convolutional Network (FCN) outperform methods based on Recurrent Neural Networks (RNNs).
In addition, as portable camera equipment becomes available, researchers have begun to explore action recognition in egocentric videos. Egocentric videos in daily living scenes is explored in [
29], using recordings from wearable cameras. Since the daily living scenes considered contain many hand/object interactions, the author proposes to learn an object model that takes into account whether or not the object is being interacted with.
Researchers continue to explore what key information is needed to recognize egocentric activities. One contribution [
30] analyzes the important cues to recognize egocentric actions. They experiment with object, motion, and egocentric features and conclude that object cues are crucial clues to classify egocentric actions. Following the idea of recognizing egocentric objects, Ma et al. [
31] create an end-to-end CNN model which embeds hand and object information into one system. The model automatically segments the hand regions and localizes objects close to the hands. By merging these data with motion cues, the model achieves good performance. Moreover, hand poses and motion information is also considered in [
32]. A compact EgoConvnet is constructed and fused with a two-stream network. However, most of the methods have been tested using datasets such as Georgia Tech Egocentric Activity (GTEA) [
33] and Activities of Daily Living (ADL) [
29]. These data sets contain clear object cues. For instance, detecting a dish object close to the hand region reveals a salient clue that the action is dish-washing or eating. As mentioned above, the majority of the egocentric action recognition efforts have been constrained within a “hand-to-object” framework, and it is difficult to extend these methods into other egocentric video tasks.
Moreover, in addition to the exploration of actions that involve hand-to-object interaction, actions that only involve pure hand gestures have also been studied. An important approach in this field is to use multi-modalities instead of solely RGB image as the input to the system. One of the crucial modalities is the skeleton joints, which offer a neat and accurate representation of human pose. A multi-model system was designed in [
34] for gesture detection and recognition in the 2014 ChaLearn Looking at People dataset [
35]. The goal is to recognize 20 Italian sign languages in a video sequence that is captured using a Kinect camera in third-person view. In their system, one of key steps is to do temporal segmentation by identifying the start and end frame of each gesture candidate. Taking advantage of the Kinect sensor, they used the skeleton joint locations as input features to obtain precise information associate with the hand gesture. Combining with an SVM model, the candidate gesture regions can be localized within an untrimmed video sequence. Another work [
36] also illustrated the importance of using skeleton joints in recognizing hand gestures. The work is also targeting at the ChaLearn 2014 dataset with multi-model architecture. One of their modalities is to construct a pose descriptor from the skeleton joint locations to describe the global appearance. Recently, Pigou et al. [
37] compared the performance of multiple architectures on gesture recognition datasets; their conclusion is that temporal convolution using a recurrent network achieves the best performance. In addition, their results indicate that depth and skeleton information can help improve the detection accuracy in general. Wu et al. [
38] propose a Deep Dynamic Neural Networks (DDNN) that processes skeleton, depth, and RGB images as multi-modal inputs. The structure achieves better performance compared to those that only process a single input. Granger et al. [
39] compared hybrid NN-HMM and RNN models for gesture recognition when the system input is only the body pose defined by the skeletal joints.
From the studies above, the importance of skeleton joints in recognizing pure hand gestures without the presence of objects is clear. However, skeleton joints extractions are not always feasible. From a camera perspective, all the videos recorded with a special camera like Kinect can naturally provide human skeleton information. While this type of camera has been used in research, it is still not widely used in practical video monitoring. An alternative approach for gathering skeleton data is to through video processing algorithms. OpenPose [
40] and DeepLabCut [
41] demonstrate the possibility of detecting skeleton joints on humans and animals. However, for our hand-hygiene videos, the third-person camera view normally records the user in close range, so the user’s head and lower body parts are barely visible. Pose estimation methods do not currently robustly detect joints from images containing only the human torso.
Based on the above works, most of the egocentric activity recognition tasks focus on the same category of daily living videos, which involves many hand-to-object interactions. For those works that target pure hand-gesture recognition, the videos are recorded using third-person views with additional depth and skeleton joint information provided. In this paper, we examine how different camera views influence hand-hygiene action detection and design a method that incorporates information from both cameras for hand action recognition in untrimmed video sequences.
Hand-hygiene specifically has been considered by [
42,
43]. However, hand-hygiene is a small part of their overall plan to support a hospital, which includes pedestrian detection and pedestrian tracking across different cameras. Therefore, hand-hygiene detection is a secondary task in these papers, and their solution is limited to only detecting whether the action happens or not. In this work, we consider a broader set of tasks for hand-hygiene recognition, which requires a new dataset and solution procedure.
3. Hand-Hygiene Dataset
In this section, we introduce our hand-hygiene dataset for hand-hygiene action recognition. We start by introducing the video collection procedure. Then, we define the set of actions we consider in this paper, by describing the choice of our specific task. Finally, we describe how a hand-hygiene system should be evaluated in the context of a real application.
3.1. Data Collection
As the area of egocentric video becomes popular, researchers have published datasets [
29,
33] for evaluating the performance of different egocentric action recognition methods. Many publicly available datasets involve only a few participants with recordings done inside home apartments. However, there exists significant differences between a home kitchen and an industrial food handling facility. Moreover, every participant has their own style of hand washing. We believe our data will generalize better if we involve more participants.
To ensure that our dataset includes enough variation between samples, we invited 100 participants and recorded the videos in two separate public restrooms with similar environments (All data collection took place in August 2018 and was done within the context of Purdue IRB # 1804020457.). All participants were allowed to wear any type of clothing, including watches and hand jewelry, and had varied ages, genders, and races. Each participant was recorded twice while they washed their hands. Initially, each participant performed a naive hand washing in the first room, according to their typical hand washing style. Then, the participant was asked to read the instructions for hand-hygiene shown in
Figure 1. Finally, each participant was recorded washing their hands again in the second room. When the data were collected, all participants indicated their willingness to have their data published. However, not all participants agreed to a public dissemination of their data; therefore, our hand-hygiene dataset will not be made publicly available at this time.
Our overall goal was to design a method that will operate in any indoor environment, including temporary environments with portable wash-stations. A single camera mounted on the ceiling created a top-down view for the previous work in [
42,
43]. However, the layout may not be consistent across all indoor environments; for example, the location of faucet, the height of the ceiling, the location (or existence) of a mirror, may all be different for different environments. Therefore, instead of designing a particular camera installation plan for every potential environment, we choose to collect our data in “portable” way. Thus, we use cameras that can be easily mounted on a participant or easily moved from one location to another.
Two type of cameras, egocentric and third-person, are applied in our data collection. An egocentric camera is capable of capturing subtle motions of hands and fingers, which provides supportive information to classify different types of hand actions. In contrast, a third-person camera is efficient at capturing a participant’s body motion as well as any interaction with the surroundings.
To explore the efficiency of third-person video and egocentric video in hand-hygiene actions, we used both egocentric cameras and a static third-person view camera for video recording. Each participant wore a GoPro camera with a harness on their chest as one egocentric camera and an IVUE glasses camera on their nose as another egocentric camera. The third-person view camera was a GoPro camera placed on top of a flat platform near the sink. We will refer these three camera views as “chest camera view”, “nose camera view”, and “wall camera view” for the rest of this paper. Each video has 1080p resolution, 30 FPS, and a wide viewing angle.
3.2. Hand-Hygiene Action Definition
To the best of our knowledge, we are the first project to apply video analytic methods on hand-hygiene actions. Therefore, we want to define the different types of hand-hygiene actions and the purpose of analyzing these actions. We defined three different video analytic tasks to explore in hand-hygiene actions. Based on the level of difficulties of these tasks, we define them as detail-level, standard-level, and detection-level tasks. In this paper, we will only explore the standard-level task.
3.2.1. Detail-Level Hand-Hygiene Task
In the detail-level task, the goal is to strictly follow each of the steps outlined by the World Health Organization in
Figure 1; did a participant perform each of the 12 steps?
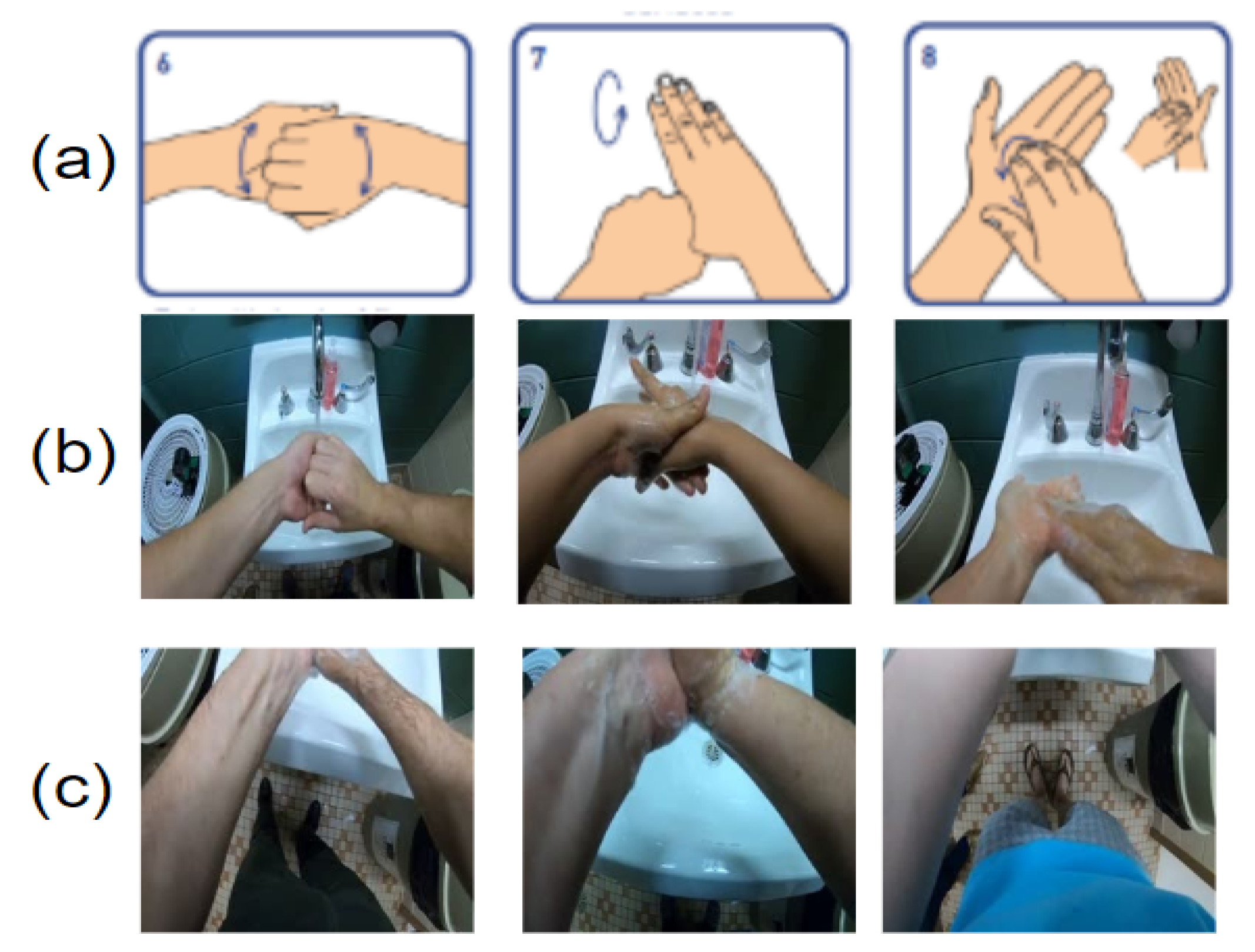
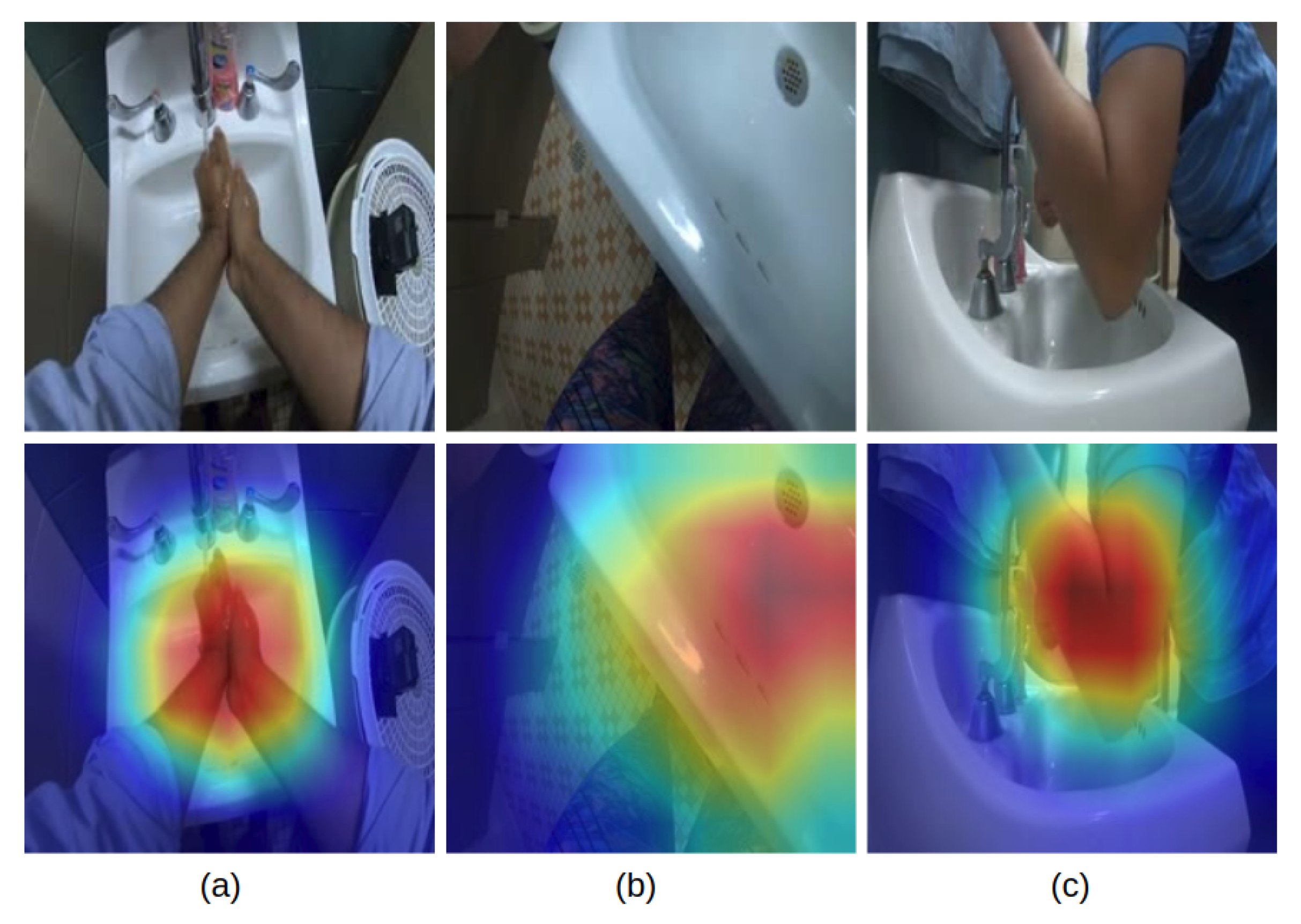
This detail-level task has the highest difficulty compared to other hand-hygiene tasks, especially for those actions that involve subtle motions of the hand and fingers, such as those illustrated in
Figure 3a. As indicated in
Figure 3b,c, the egocentric camera does not always capture the entire hand regions, because participants have different body size and personal habits. Therefore, it is inevitable that hand regions may be missing during the detailed hand-hygiene steps.
Even if the entire hand regions are clearly recorded, recognizing actions with subtle finger and hand motions is still difficult. The temporal boundaries between actions of rub cross finger, rub palm, and rub thumb are difficult to distinguish even by a human expert. The method in [
44] to recognize dynamic long-term motion is only likely to be able to recognize the entire action sequence. To accurately localize the boundary between these similar actions, we may need to apply an RGB-D sensor and construct hand-finger skeleton models [
45].
3.2.2. Standard-Level Hand-Hygiene Task
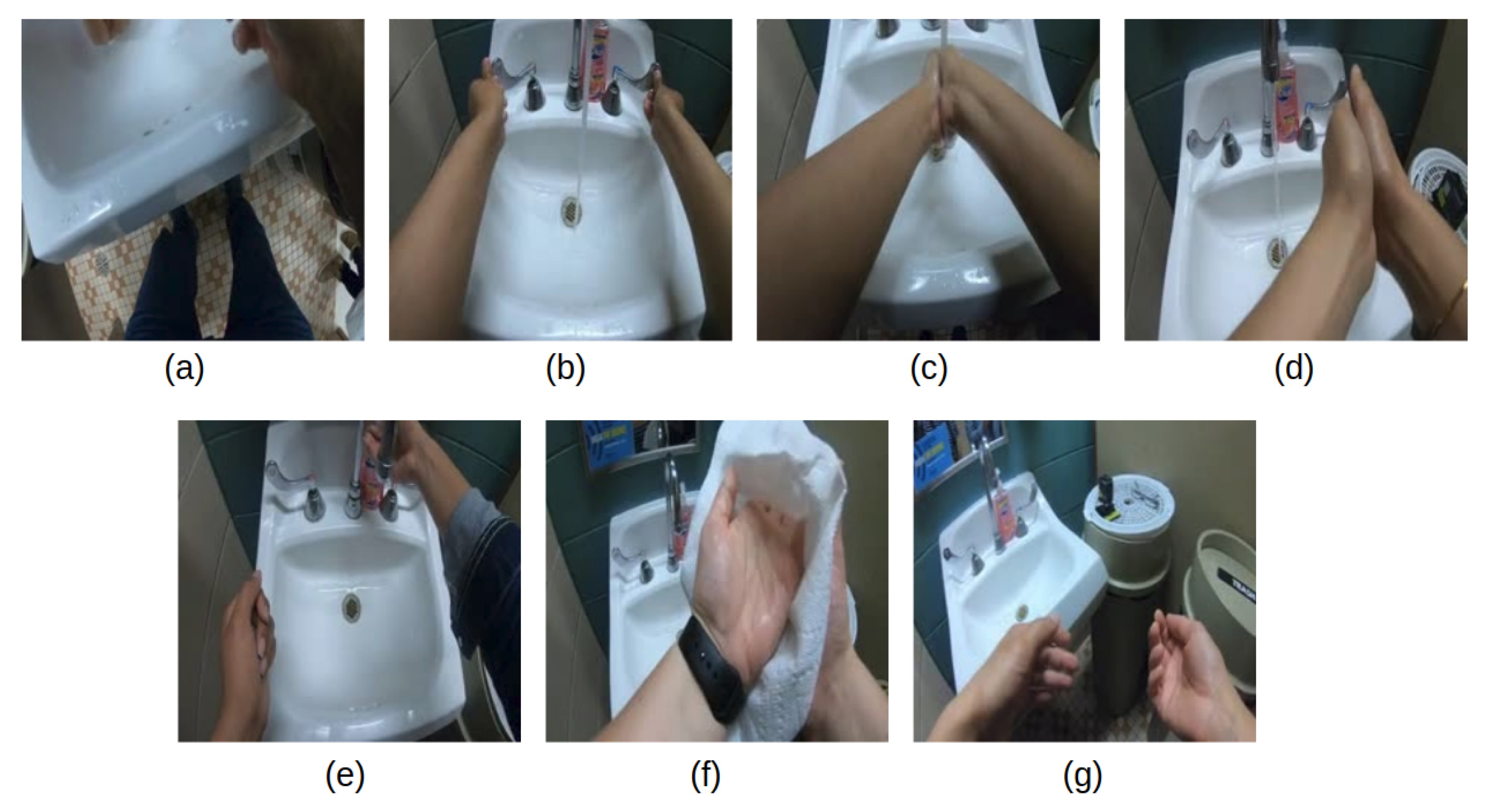
In the standard-level hand-hygiene task, we focus on analyzing only the components of the 12 steps in
Figure 1 that are most critical from a food-safety hand-hygiene perspective. As a result, we define the standard-level hand-hygiene task to distinguish among the 7 types of actions shown in
Figure 4: touch faucet with elbow, touch faucet with hand, rub hands with water, rub hands without water, apply soap, dry hands, and a non-hygiene action. Essentially, the six rubbing actions are condensed into a single rubbing action, and we retain the critical components of applying water and soap, rubbing for an extended period, and drying the hands. In addition, this task includes identifying the action “touch faucet with hand”, which must be avoided to prevent re-contamination after the hands have been rinsed with water [
3].
As mentioned above in
Section 3.2.1, the subtle hand and finger motions may not be completely recorded for a variety of reasons. The standard-level task removes the need to distinguish among the subtle hand and finger motions, so a classifier for these 7 action classes will be more robust than for the detail-level task, both with respect to the variations of a participant’s body size and to the hands not appearing in the camera view.
3.2.3. Detection-Level Hand-Hygiene Task
In addition to the previous two task levels we defined, there exists a detection-level hand-hygiene task, which simply analyzes whether or not the hand-hygiene action happened. For this task, egocentric camera information regarding the hands is not necessary, and directly analyzing the third-person camera should achieve an acceptable result.
3.3. Evaluating Hand Hygiene for a Real Application
In this paper, we focus on the standard-level hand-hygiene task, which considers 7 different action types. In a real application for hand-hygiene verification, a user would like to know if some actions happened for a sufficiently long time, and if other actions happened at all. Therefore, performance evaluation of a system requires distinct measurements depending on the action type. For example, both “rub hands with water” and “rub hands without water” reflect the participants’ effort to clean their hands. Thus, it is important for us not only to detect the existence of these actions, but also to determine how long they last. Three actions, “touch faucet with elbow”, “apply soap”, and “dry hands”, help sanitize and prevent re-contamination; therefore, we only need to confirm the existence of these actions. However, “touch faucet with hands” actually re-contaminates hands, and should be identified if it happens. Meanwhile, the background non-hand-hygiene actions do not influence the hand washing quality, and these are included in the set of actions for completeness.
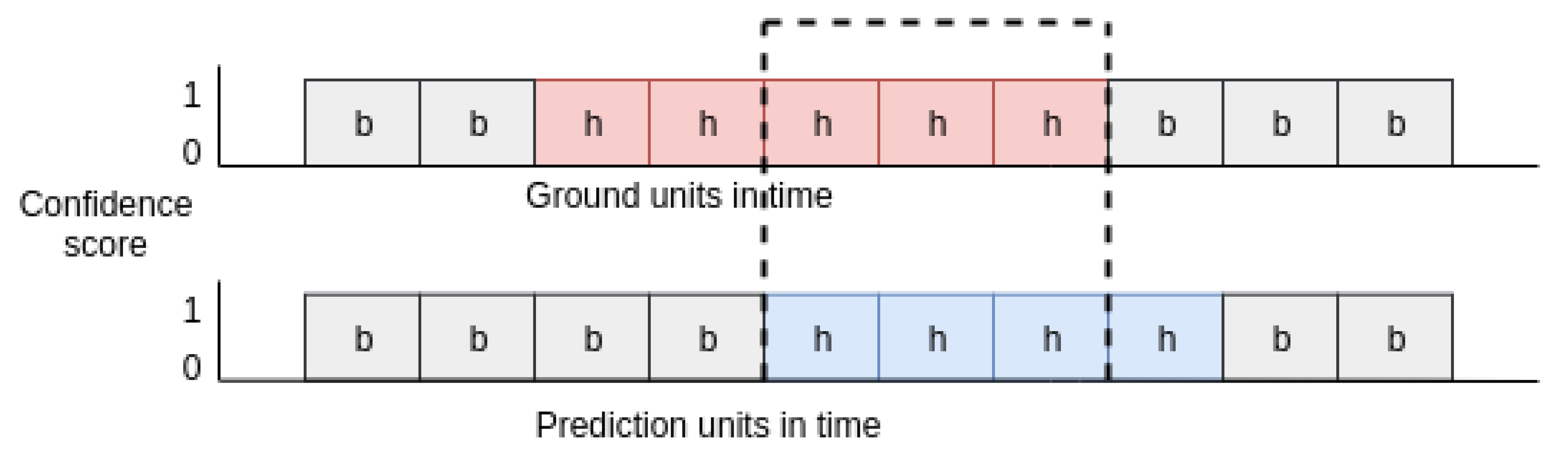
Based on these observations, we evaluate the hand-hygiene performance of a participant by evaluating whether a correct decision was made regarding which action occurs during each second of the video. Thus, we divide each target video into non-overlapping units of 30 consecutive frames, which corresponds to 1 s in time. Each unit is labeled with only one action type by counting the most frequent action type of each frame among all 30 frames. This assumes a detector makes one prediction during each unit. To achieve this, a detector can predict an action for 30 frames individually and average the confidence scores to create a prediction result for the unit, for example.
The top and bottom of
Figure 5 illustrate the unit-based ground truth and prediction results, respectively. The region between the dashed lines is the intersection between ground truth label and system prediction of a hand-hygiene action. If, for this particular action, we only need to assess whether it happened or not, we can simply verify the existence of an intersection region. However, if for this action, we need to assess how long it lasted, we evaluate the prediction result by the Jaccard index, which is also known as the Intersection Over Union (IOU). The Jaccard index is defined as
, where
is the number ground-truth units and
is the number of predicted units, for a particular action.
4. A Two-Stage System to Evaluate Hand Hygiene
In this section, we describe a basic two-stage system to detect standard-level hand-hygiene actions, namely, the 7 actions described in
Section 3.2.2, that occur in real-life scenarios, i.e., in untrimmed videos. Our two-stage design is motivated by the desire to apply low-complexity processing during a first pass, with the goal to reduce the amount of video that later must be processed with more complex methods in the second stage. Both stages process each of the wall and chest camera outputs, and the specific tasks of each stage are motivated from our experiments described below in
Section 5. In particular, the two stages and selection of which camera should be applied to a certain hand-hygiene stage are motivated by our experiment (described below in
Section 5.1) which explores which camera is most effective for each action, and by our observations from
Figure 2 above.
Recall that most hand-based actions are densely located in the hand-hygiene period and partially distributed within the post-hygiene period. All the remaining video content consist of non-hygiene actions with unknown and variable duration. Thus, it would be inefficient to densely process the entire untrimmed video with a computationally-complex CNN model. Recall that an untrimmed video clip contains more than one action type, while a trimmed video clip contains only one action.
The first stage of the system consists of two so-called coarse classifiers; one processes the wall video and one processes the chest video. They each densely process the entire untrimmed video and localize potential candidates for the temporal regions that might contain standard-level hand-hygiene actions. In the second system stage, we apply two so-called refinement classifiers that only process the candidate locations identified in the first stage.
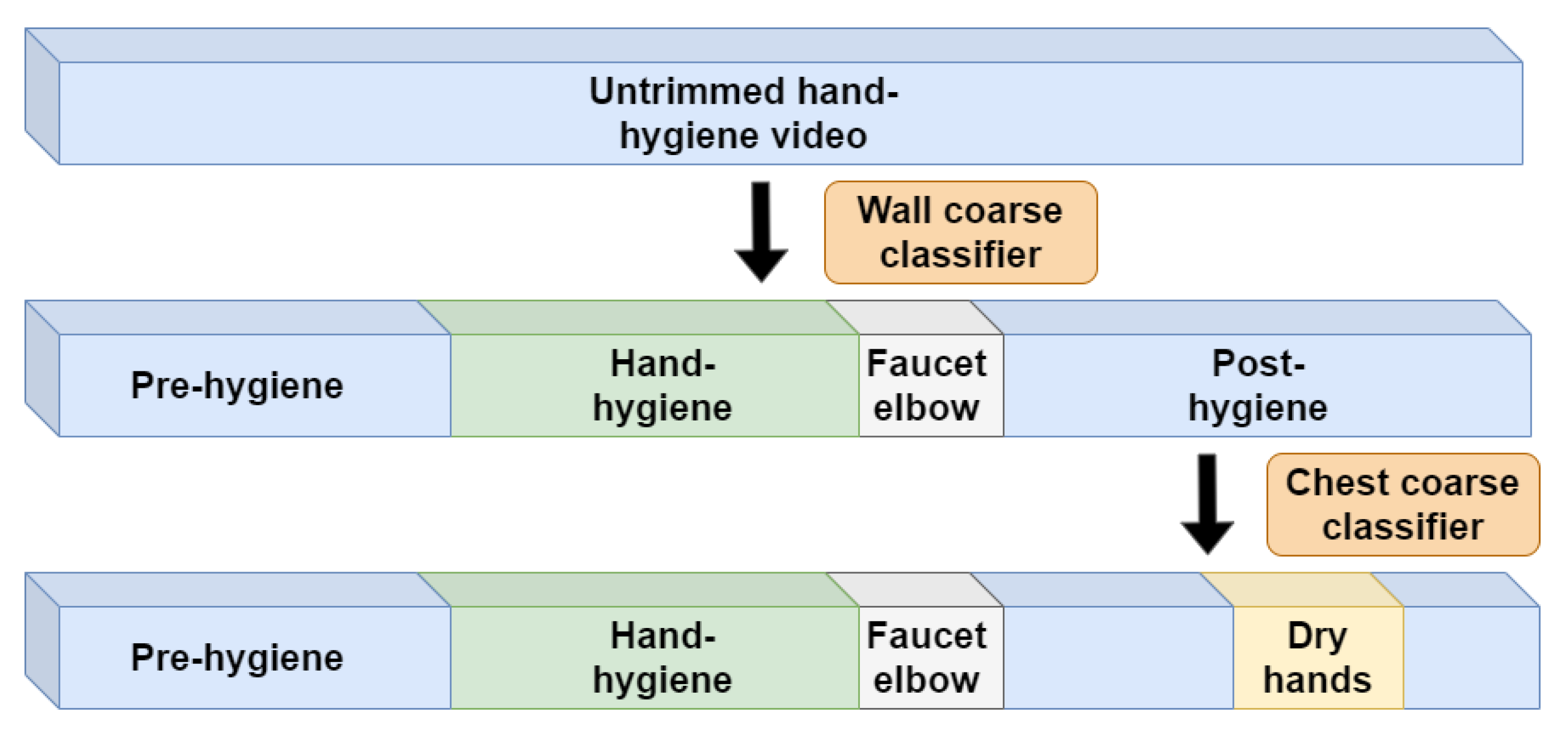
Specifically, in the first system stage, as shown in
Figure 6, we apply the wall coarse classifier to densely process the entire untrimmed video in non-overlapping 30 frame units. Even if a non-overlapping split might cut a small portion of consecutive hand-hygiene action into two different units, this will have little affect on our goal here, since when our system is applied in practice, whether the hands are detected as rubbing for 10 or 10.1 s will not influence on the final hand-hygiene quality. The entire untrimmed video is then divided into pre-hygiene, hand-hygiene, post-hygiene regions, and candidate regions of the “faucet elbow” action. The pre-hygiene region will not be further processed later in the system, but the other regions will be processed by subsequent specifically-targeted classifiers. Design considerations for the wall coarse classifier are described in
Section 5.3.1.
Additionally in the first system stage, the chest coarse classifier processes only the region identified as “post-hygiene”. Its goal is specifically to identify whether the action of “dry hands” happened or not. Further detail on its design is provided in
Section 5.3.2.
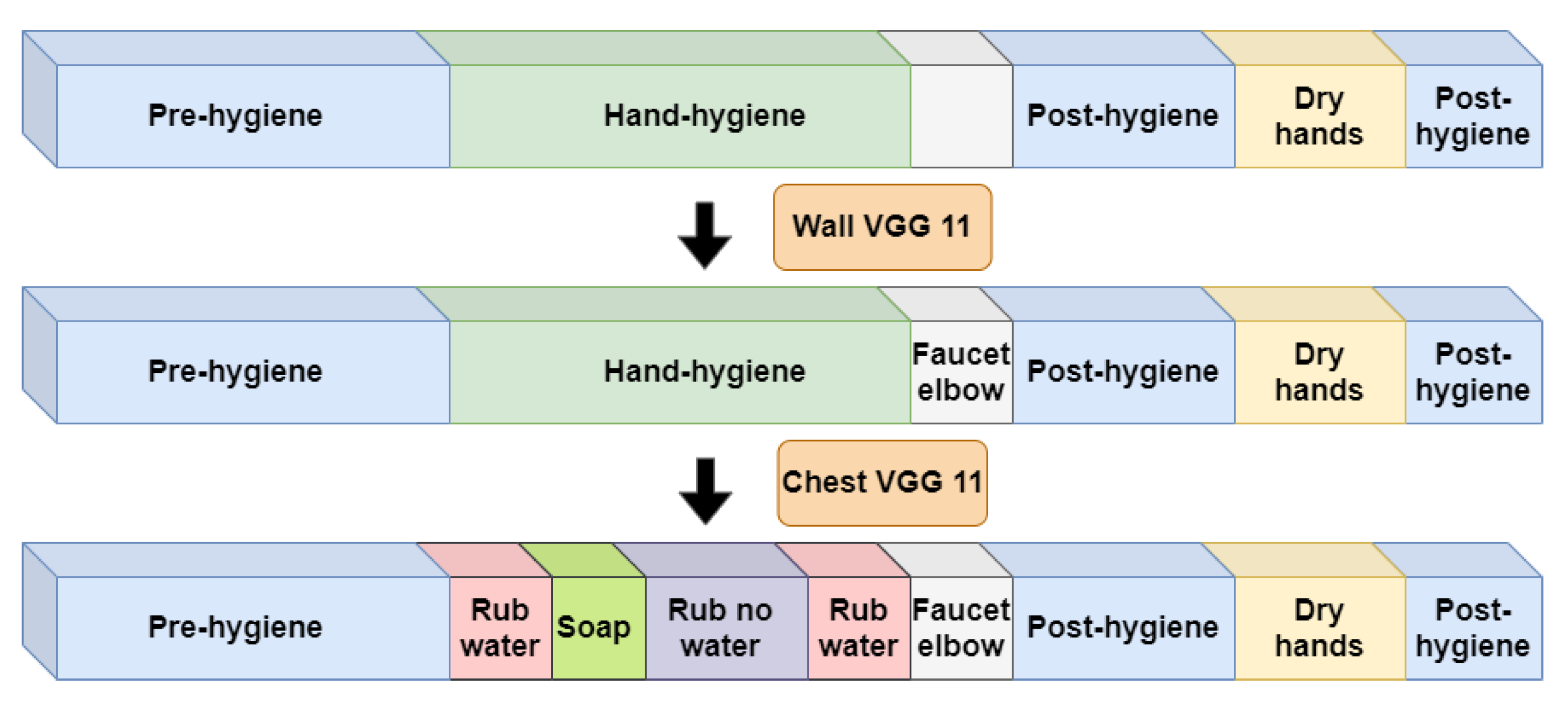
In the second system stage, shown in
Figure 7, we apply two refinement classifiers. The first wall-refinement classifier only processes the short temporal region that was identified by the first-stage wall coarse processor as being a candidate region for the “faucet elbow” action. Its goal is simply to verify the existence of the “faucet elbow” action and further refine its temporal location.
The final classifier uses the chest view to refine the actions that take place in the hand-hygiene region. Its goal is to label every time unit according to each of the 7 actions in the standard-level hand-hygiene task described in
Section 3.2.2. The design of this classifier is considered in
Section 5 below. In particular, as we show in
Section 5.1, the chest camera view provides rich details for hand actions during the hand-hygiene period. Therefore, this classifier is well suited for identifying the actions that the earlier classifiers have not considered, namely, the 4 actions “touch faucet with hand”, “rub hands with water”, “apply soap”, and “rub hands without water”.
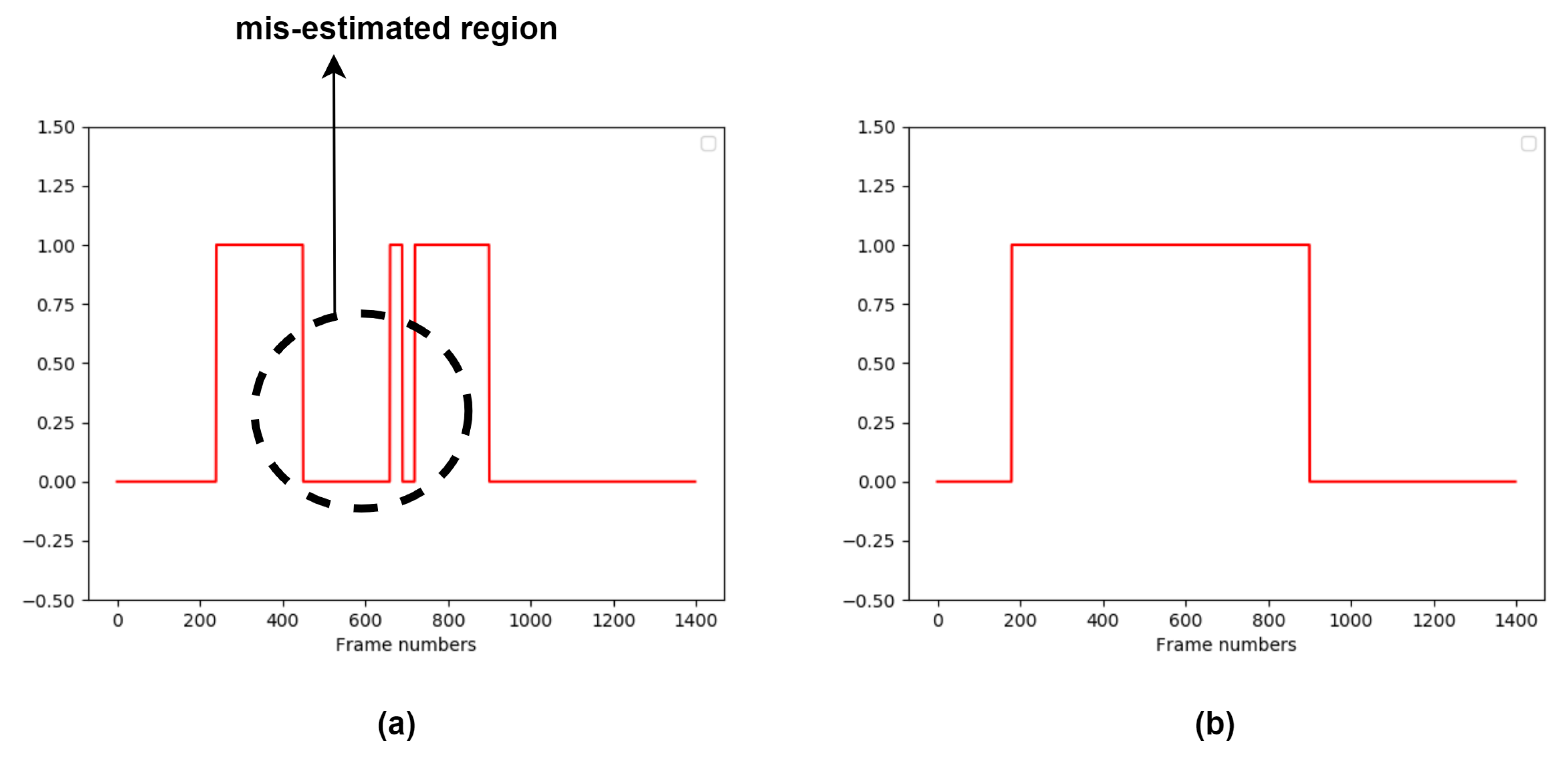
However, some actual hand-hygiene periods may have been misidentified as non-hygiene in the first system stage. This is illustrated in
Figure 8. To compensate for this possibility, we expand the hand-hygiene temporal region by applying an iterative search method. In particular, we apply the chest refinement classifier to all time units to the left and right of any identified hand-hygiene time unit. This continues recursively, until this classifier labels a time unit as either a non-hygiene action or “touch faucet with elbow”, and all the initially-labeled hand-hygiene units have been processed. An illustration of the final temporal region searched by the chest refinement classifier is indicated in
Figure 8b.
To summarize, the overall system takes as input the untrimmed video that contains both hygiene and non-hygiene actions. Four actions must be identified as to whether they happen or not. These are the actions of “dry hands”, “touch faucet with elbow”, “touch faucet with hand”, and “apply soap”. The first is detected by the chest coarse classifier, the second by the refinement wall classifier, and the latter two by the refinement chest classifier. For the remaining two actions, “rub hands without water” and “rub hands with water”, both of which are identified by the refinement wall classifier, it is important to verify that they lasted for at least 20 s. During our final system evaluation in
Section 6, we will consider estimates of this duration as a measure of performance. However, in the next section, which explores detailed questions about how to design each of the four classifiers, we consider only detection and recognition accuracy.
6. Performance of the Two-Stage Hand-Hygiene System
In the previous
Section 5, we explore the individual designs for each of the coarse and fine classifiers. The overall two-stage system for recognizing and evaluating hand-hygiene activities within untrimmed video appears in
Section 4. In this section, we evaluate the performance of the entire two-stage system for detecting actions within untrimmed hand-hygiene videos. We first explain the experimental protocol, then report our experimental results for the overall system performance.
6.1. Experimental Protocol
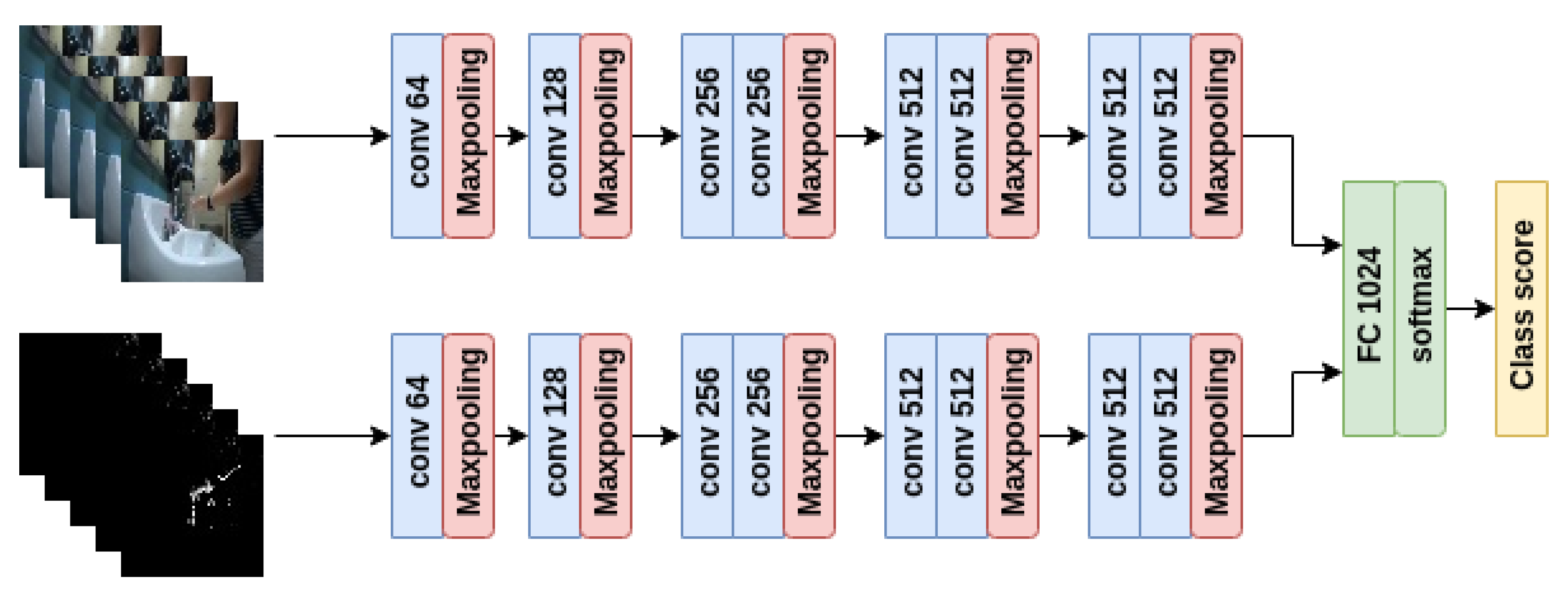
In the first stage of the system, the wall coarse classifier uses the CNN model with RGB and MHI as inputs, and the chest coarse classifier applies a CNN model for binary classification on the “dry hands” action. In the second system stage, both the CNN model for wall and chest camera view are applied with VGG11 network architecture.
To create a point of comparison, we consider a baseline system that applies the second-stage VGG11 networks to the entire chest camera video and wall camera video. Each classifier densely processes the entire untrimmed video using non-overlapped 30-frame units. The classifier for the wall camera is only responsible to detect the action “touch faucet with elbow” action, and the classifier for the chest camera is applied to detect all other actions.
Recall that our goal for the two-stage system was to achieve similar performance to the baseline system, but with less computation. The baseline system applies VGG11 on every 30 consecutive frame units throughout the entire video, while the two-stage system applies VGG11 only when a simpler classifier would be insufficient. Therefore, we expect that both systems will achieve very similar detection accuracy. If so, it demonstrates that our coarse classifier successfully localizes the crucial hand-hygiene temporal parts, reducing the overall system complexity without sacrificing performance.
The overall performance of the two systems is evaluated on the first trial defined in
Section 5.1.1.
6.2. Results and Discussion
We evaluate the overall performance of this system in two parts. In the first part, we evaluate only the two actions that require an estimate of how long they last; these actions are “rub hands with water” and “rub hands with no water”. We measure their detection performance using the Jaccard index, applied for units of 30 consecutive frames. In addition, we measure the average prediction error by computing the absolute difference between the detected time duration and ground-truth duration, averaged across all test videos. In the second part of evaluation, we consider the remaining actions for which we only need to confirm whether or not they happened. We evaluate these simply using the accuracy across all test videos, computed by dividing the number of correct predictions divided by the total number of predictions.
Table 7 and
Table 8 show the evaluation of the rubbing actions. As we can observe, both the baseline and proposed two-stage system have similar performance in terms of both the Jaccard index and error in the estimated duration. This indicates that the first stage of the two-stage system could successfully localize the hand-hygiene period within the untrimmed video; the estimates of how long each action happens is consistent. Moreover, the ground-truth statistics for these two actions across the entire data set is shown in
Table 9. Given the large average duration and standard deviation of these two actions, an estimation error of around 2 s is an reasonable result. To obtain further improvement, increasing the complexity of the CNN model and optimizing the hyperparameters might reduce the average error.
Table 10 demonstrates the accuracy across all test videos for the discrete actions of “apply soap”, “dry hands”, and “touch faucet with elbow”. These three actions have nearly identical performance for both the two-stage system and the baseline system. Therefore, no performance is lost by applying the low-complexity model for temporal localization.
Overall, the two-stage system and the baseline system achieve similar performance for recognizing each action and for estimating the duration of rubbing. However, with the support of the low-complexity CNN models for localization, the two refinement classifiers in our two-stage system only process of the frames in the untrimmed videos. This is in contrast to the baseline that must densely process of the frames in the untrimmed video, regardless of the duration of the hand-hygiene activity. Further, it should be noted that the videos we collected in this project were specifically designed to analyze hand hygiene, and as such they contain very little time spent on non-hygiene actions. Specifically, the average non-hygiene actions occupy only 28.1% of the total video duration, with the remaining 71.9% containing hand-hygiene activities. In more typical situations, where the hand hygiene would take less time relative to the overall collection of activities, the computational savings achieved by the temporal localization in our two-stage system would increase dramatically.
7. Conclusions
In this paper, we introduce the task of hand-hygiene action recognition from untrimmed video. We approach this problem by defining different levels of the task and design a system that performs hand-hygiene recognition at the standard level. To explore the efficiency of using different camera views on recognizing 7 hand-hygiene actions, we collected a dataset using three cameras and 100 participants. Using this dataset we are able to explore different deep-learning models on our hand-hygiene dataset with both egocentric and third person camera views. The results indicate both these camera views have their own unique advantages for recognizing certain action types. Thus, it is important to use both camera views for hand-hygiene action recognition.
Moreover, we also explore the realistic scenario in which we recognize hand-hygiene actions inside untrimmed video. We design a two-stage system to localize the target hand-hygiene regions and we apply deep-learning models from two camera views for the final recognition. In the first stage, a low-complexity CNN model is applied on the third-person view to segment the untrimmed video into three temporal periods. In the second stage, we assign these temporal periods to more complex CNN models trained for different camera views, so that each model only has to recognize the actions suited for that camera view. In the final evaluation, our two-stage system achieves similar performance to the baseline, which applies CNN models to densely process every second in the entire untrimmed video. We demonstrate that the two-stage system can efficiently filter out non-hygiene regions so that it only needs to apply complex CNN models to the crucial hand-hygiene temporal regions.
In the future, we plan to extend our current hand-hygiene system to different environments. The work presented in this paper focuses on system for hand-hygiene in a small enclosed restroom. However, other realistic hand-hygiene scenarios may also happen in industrial kitchens, restaurants, or laboratories. It is worth exploring how to refine our system to extract features that are robust against different illumination and background scenarios. This would allow the system to be easily applied to a new target environment to detect hand-hygiene actions without significant modifications. Furthermore, our current hand-hygiene system can also be extended to be applied on other aspects of food handling, like washing vegetables, by exploring the interaction between hands and objects. Moreover, the hand-hygiene system could also be expanded to consider the detail-level hand-hygiene task, as we described in
Section 3.2.1, by taking advantage of more supportive information, such as depth and the location of human skeleton joints.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}