
Peach Flower Monitoring Using Aerial Multispectral Imaging


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
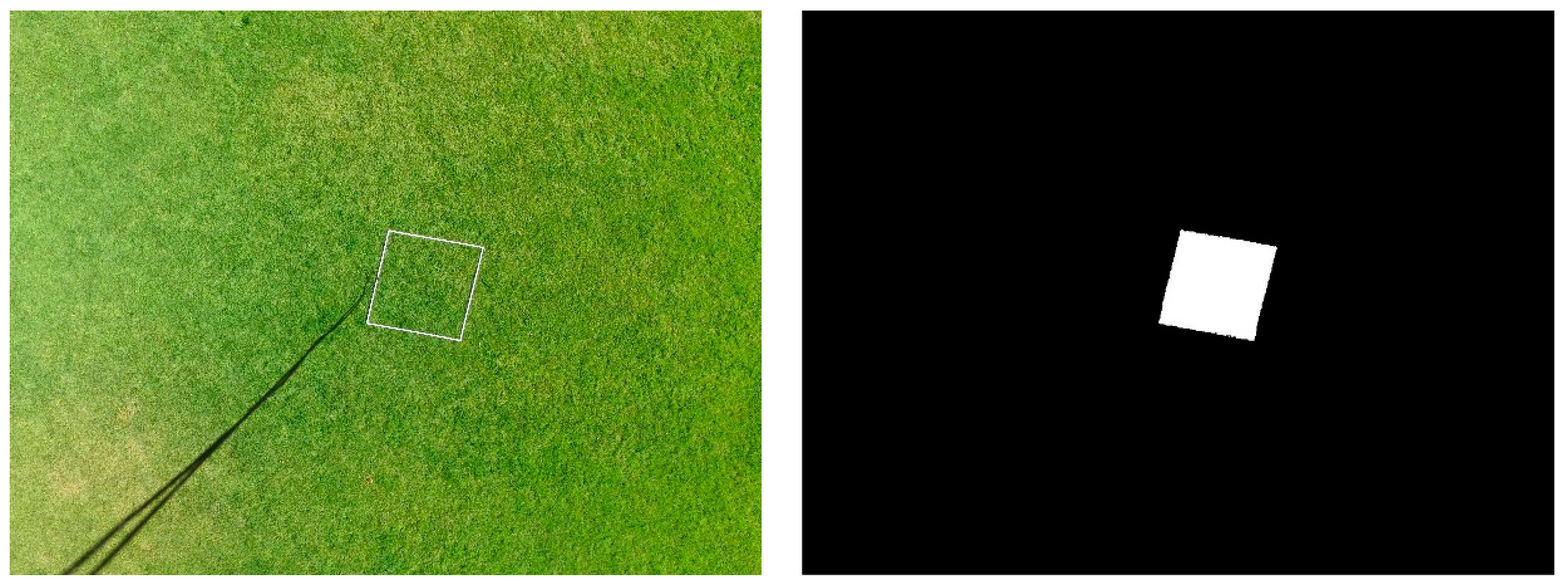
2.1. Target Field
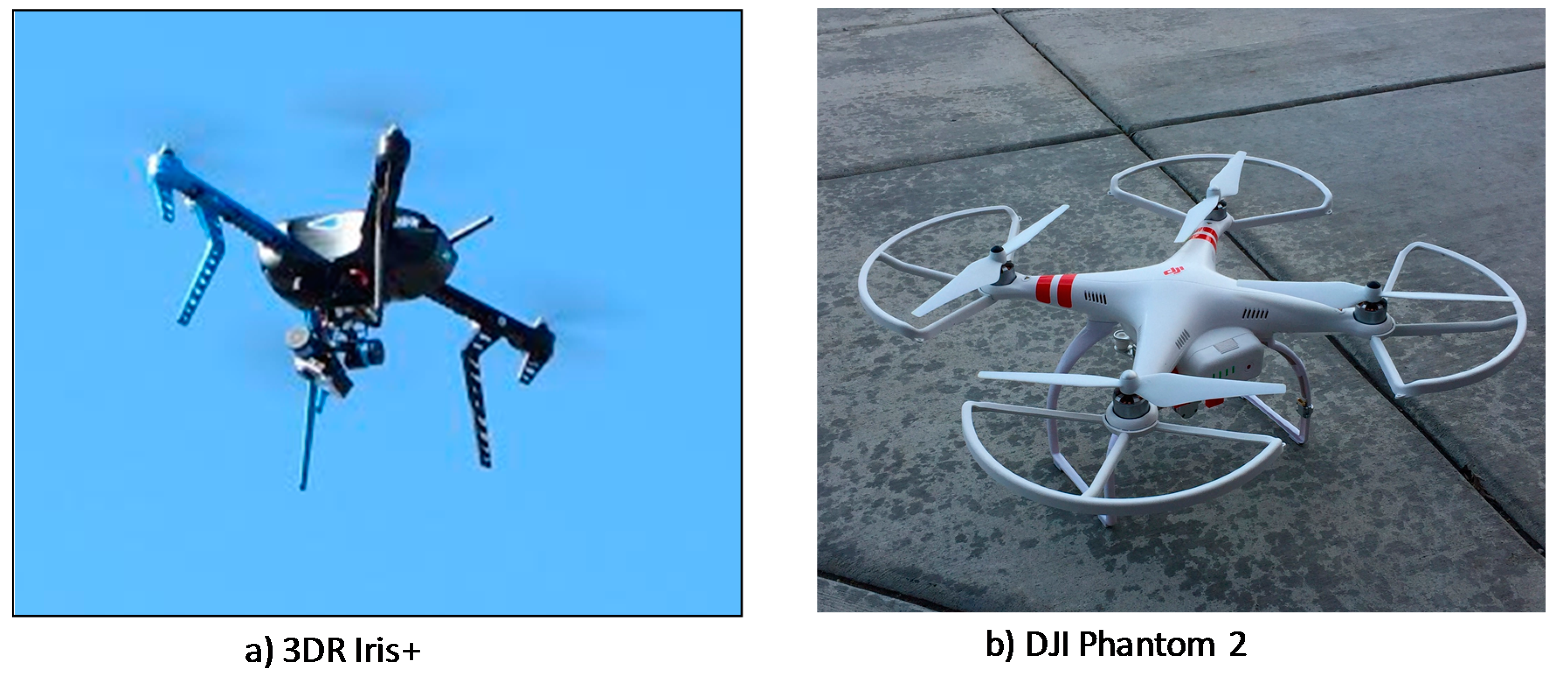
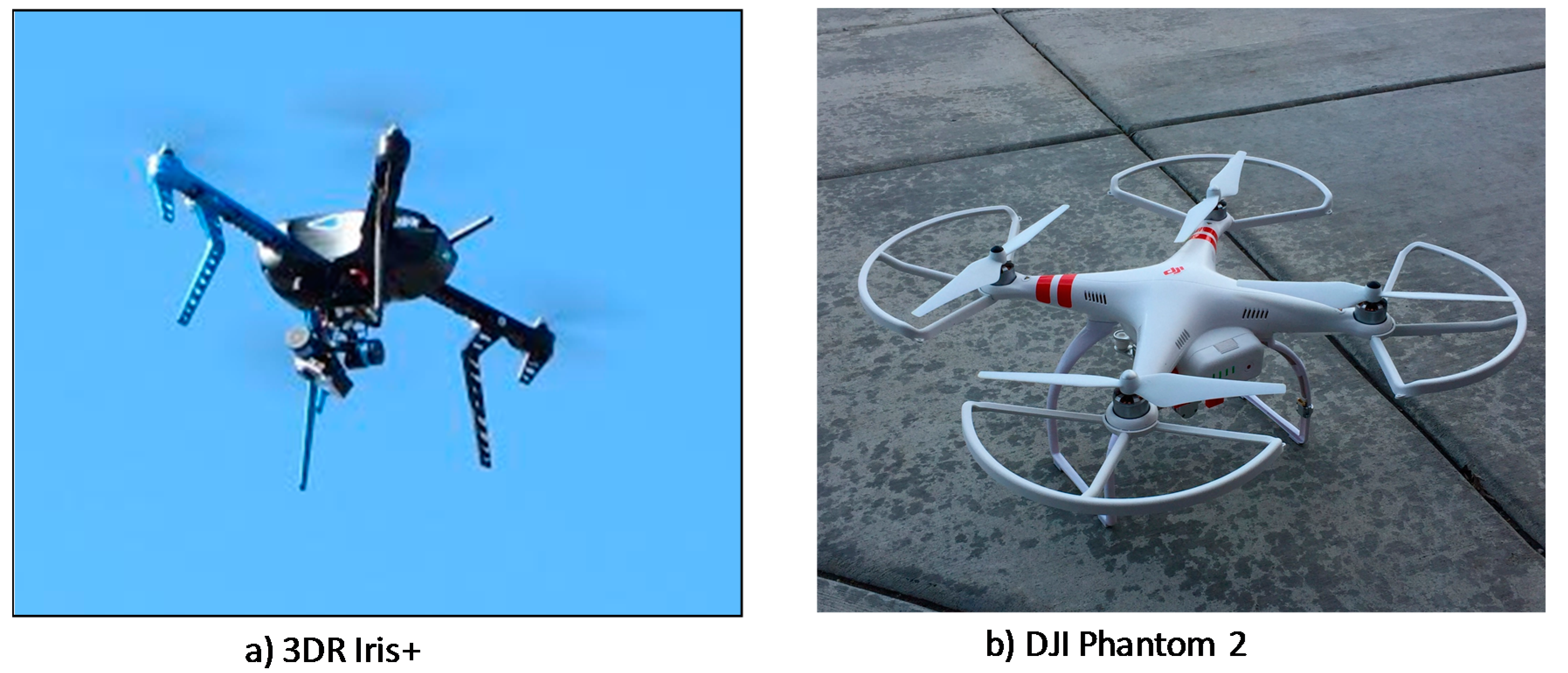
2.2. Image Acquisition System
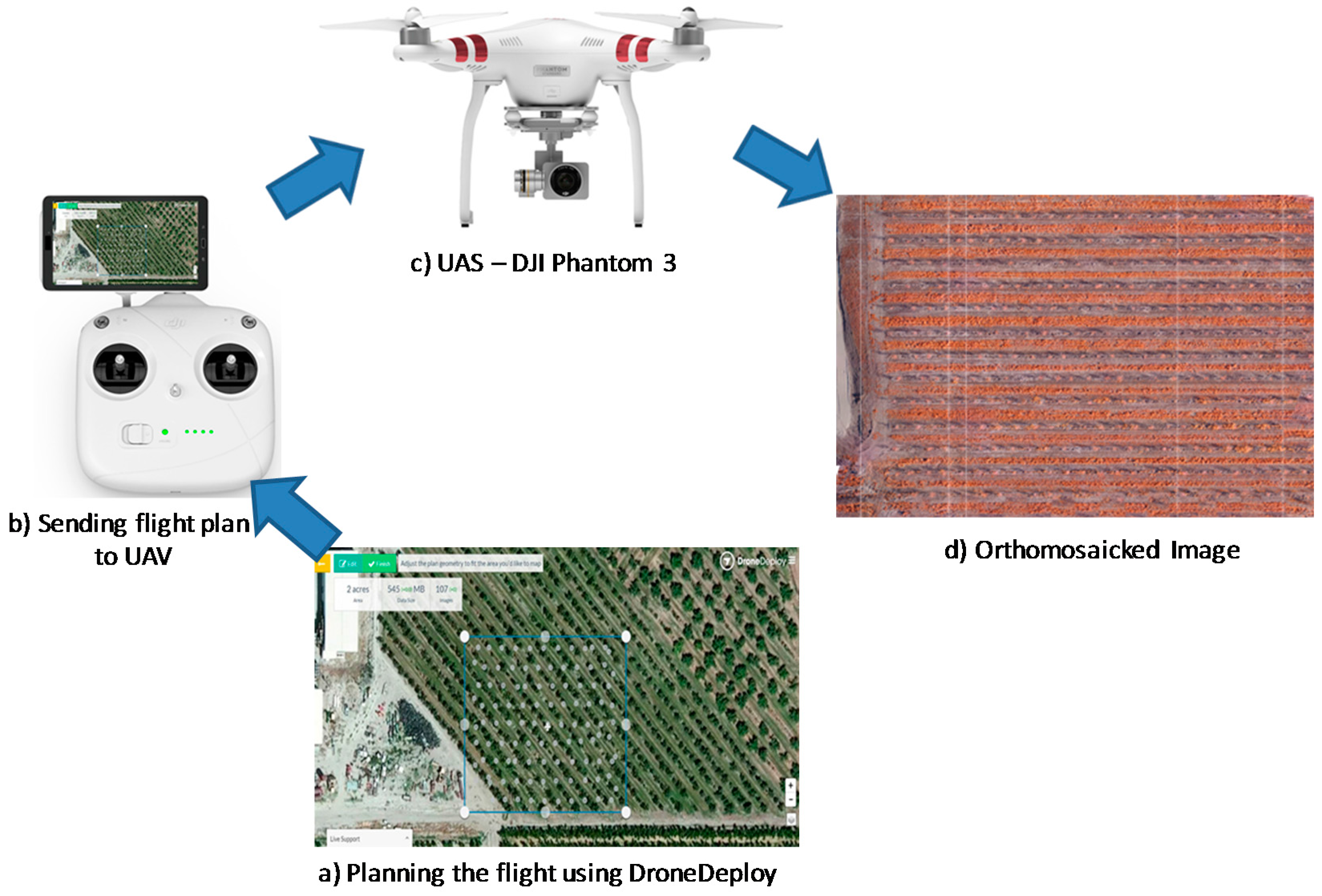
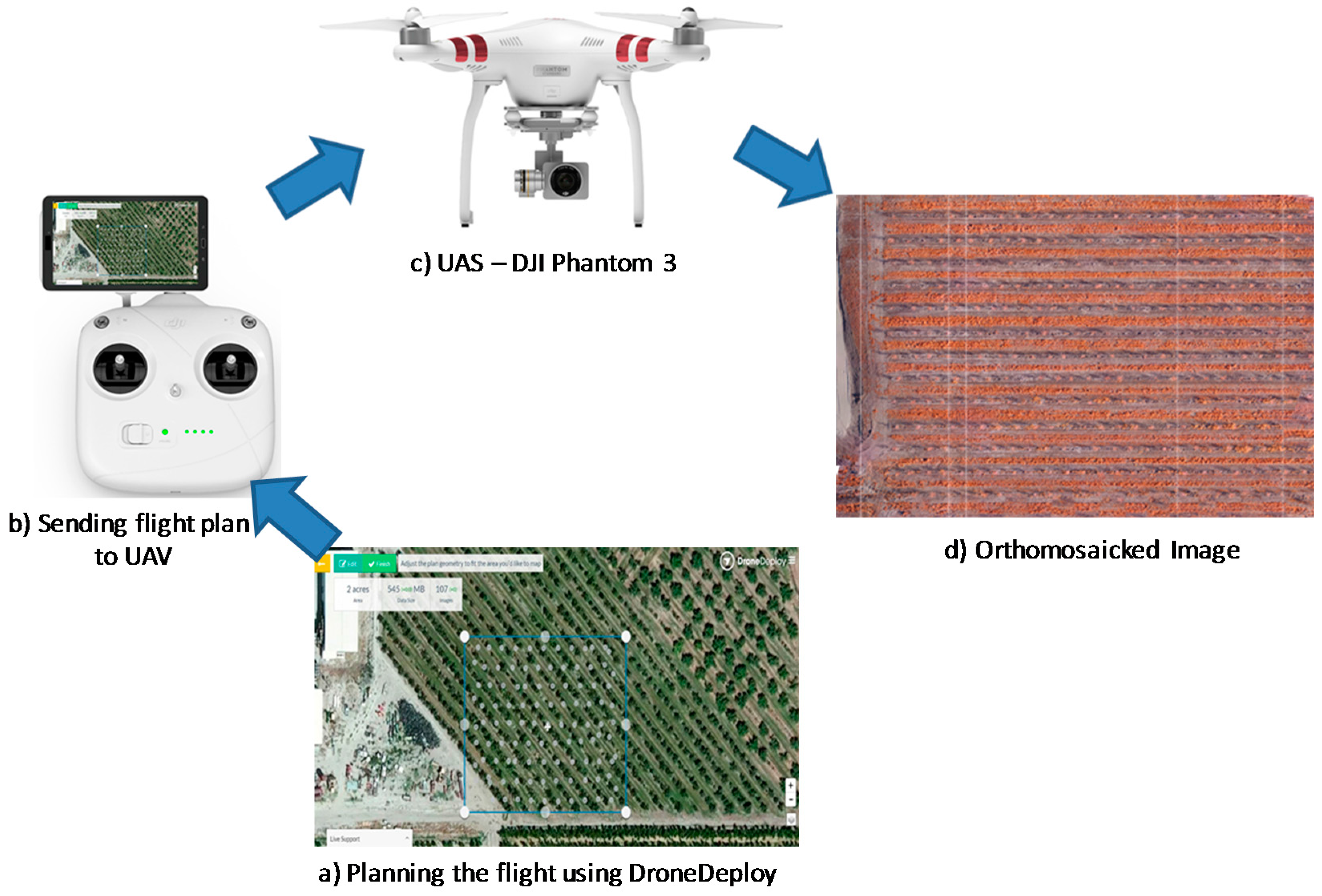
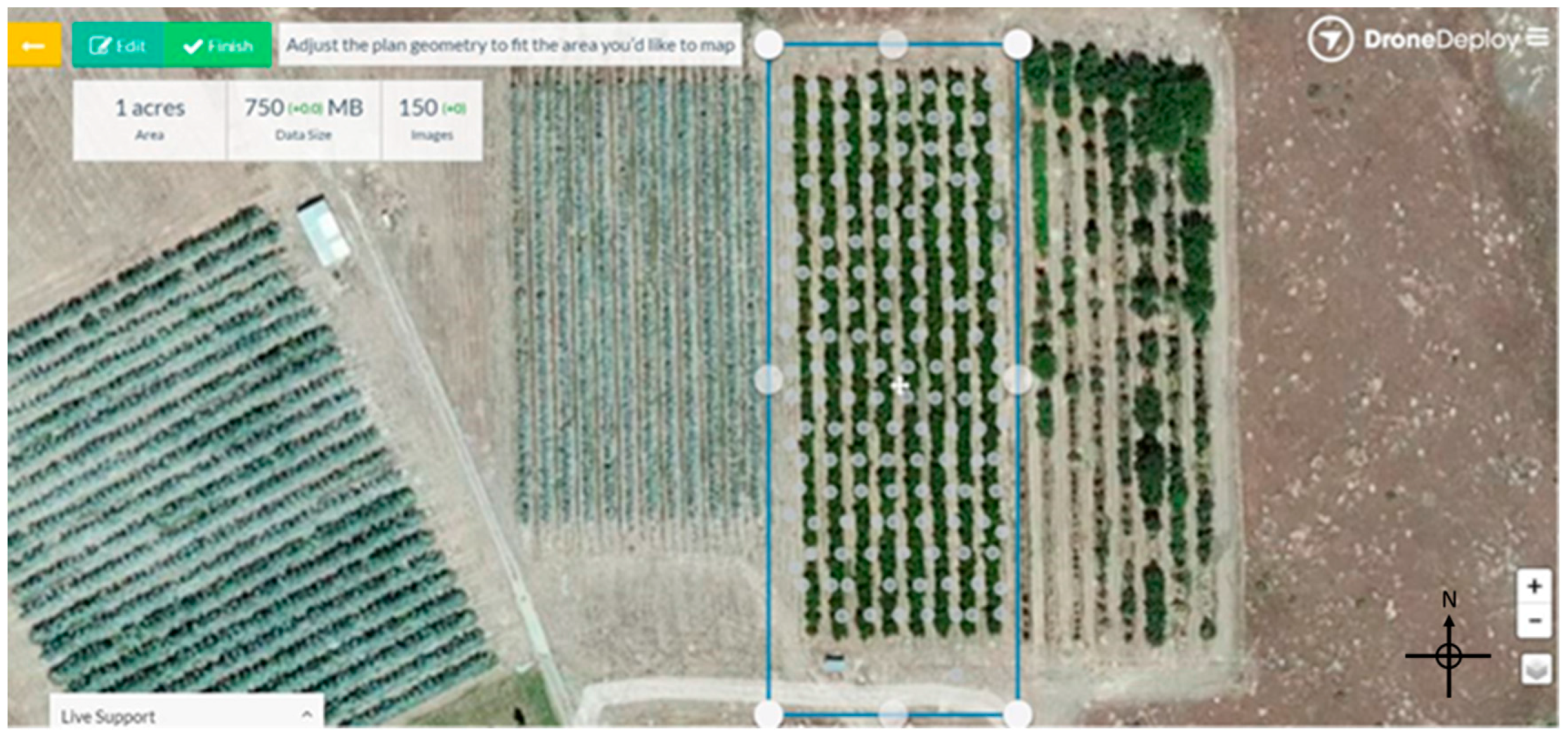
2.3. DroneDeploy
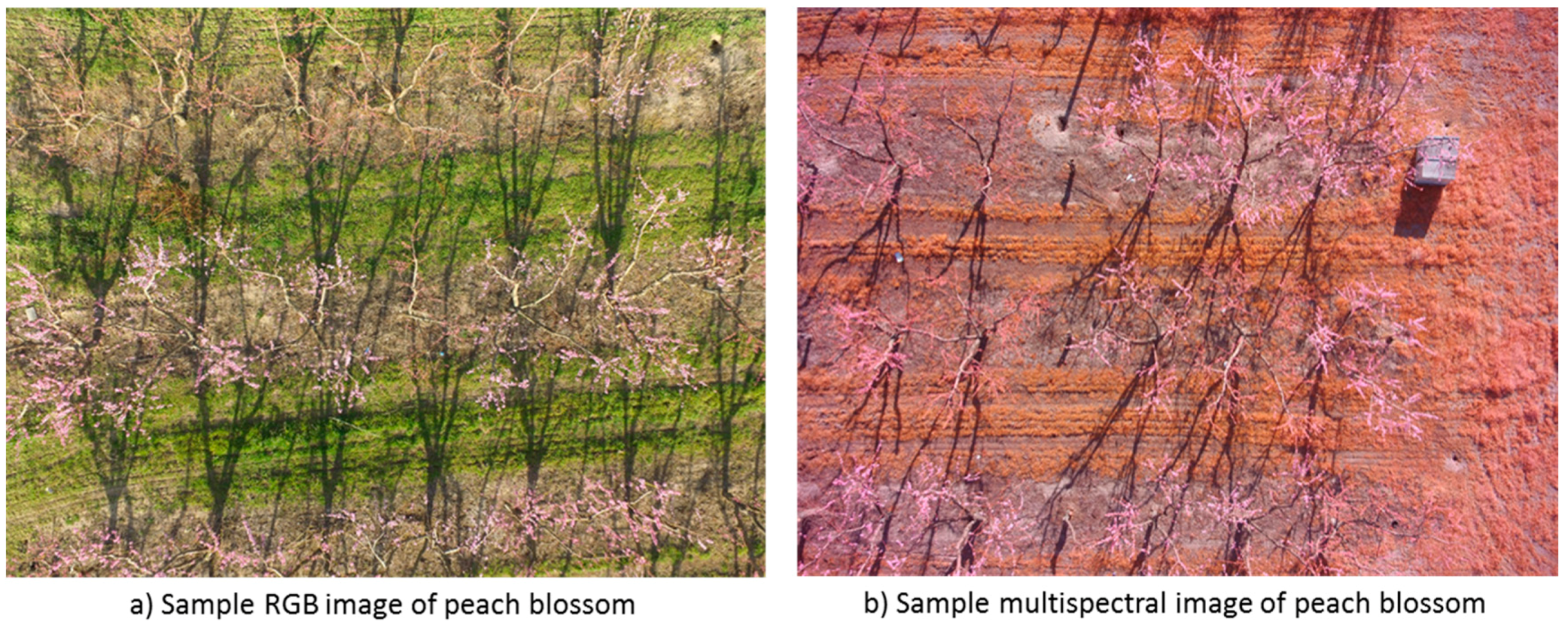
2.4. Image Acquisition
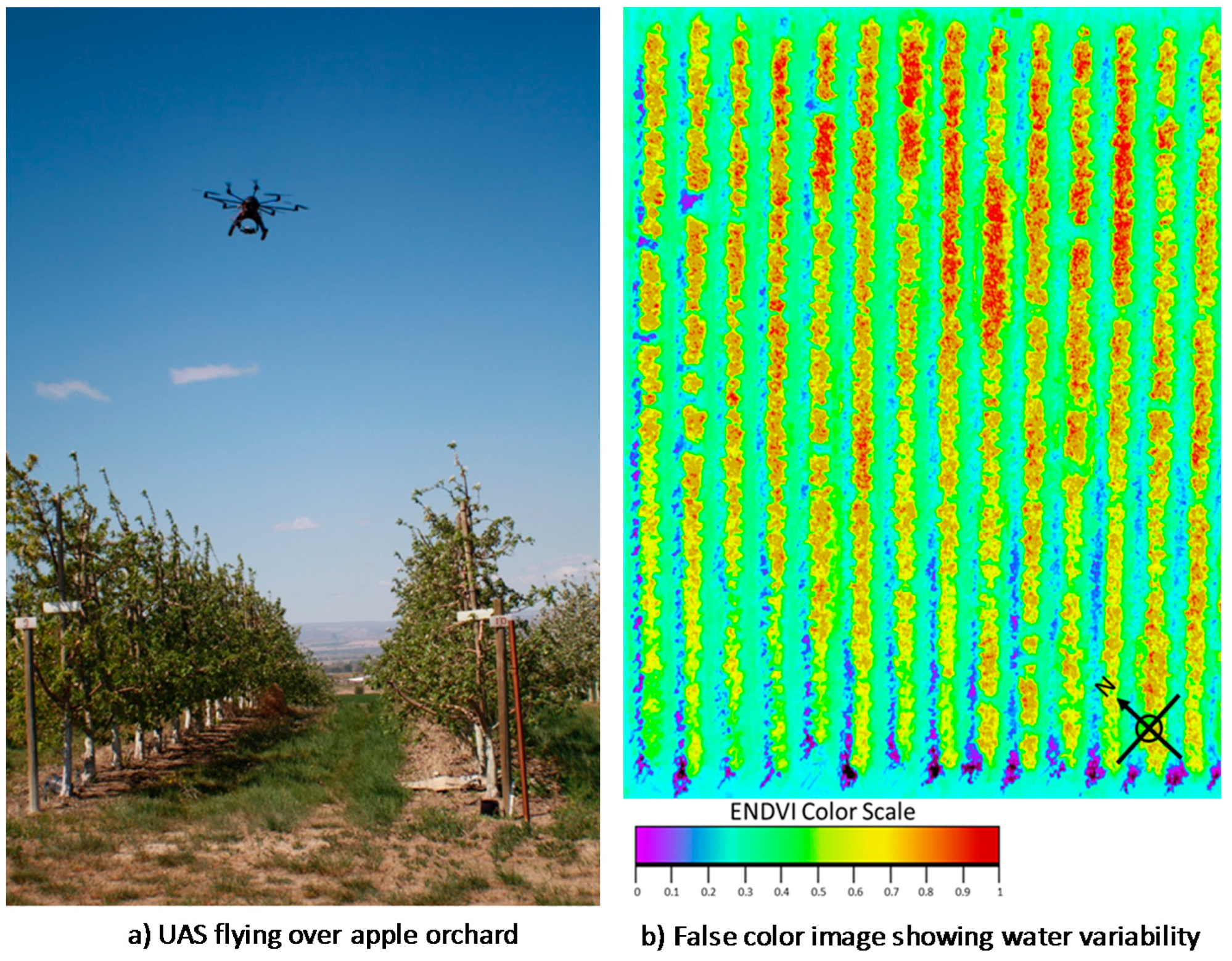
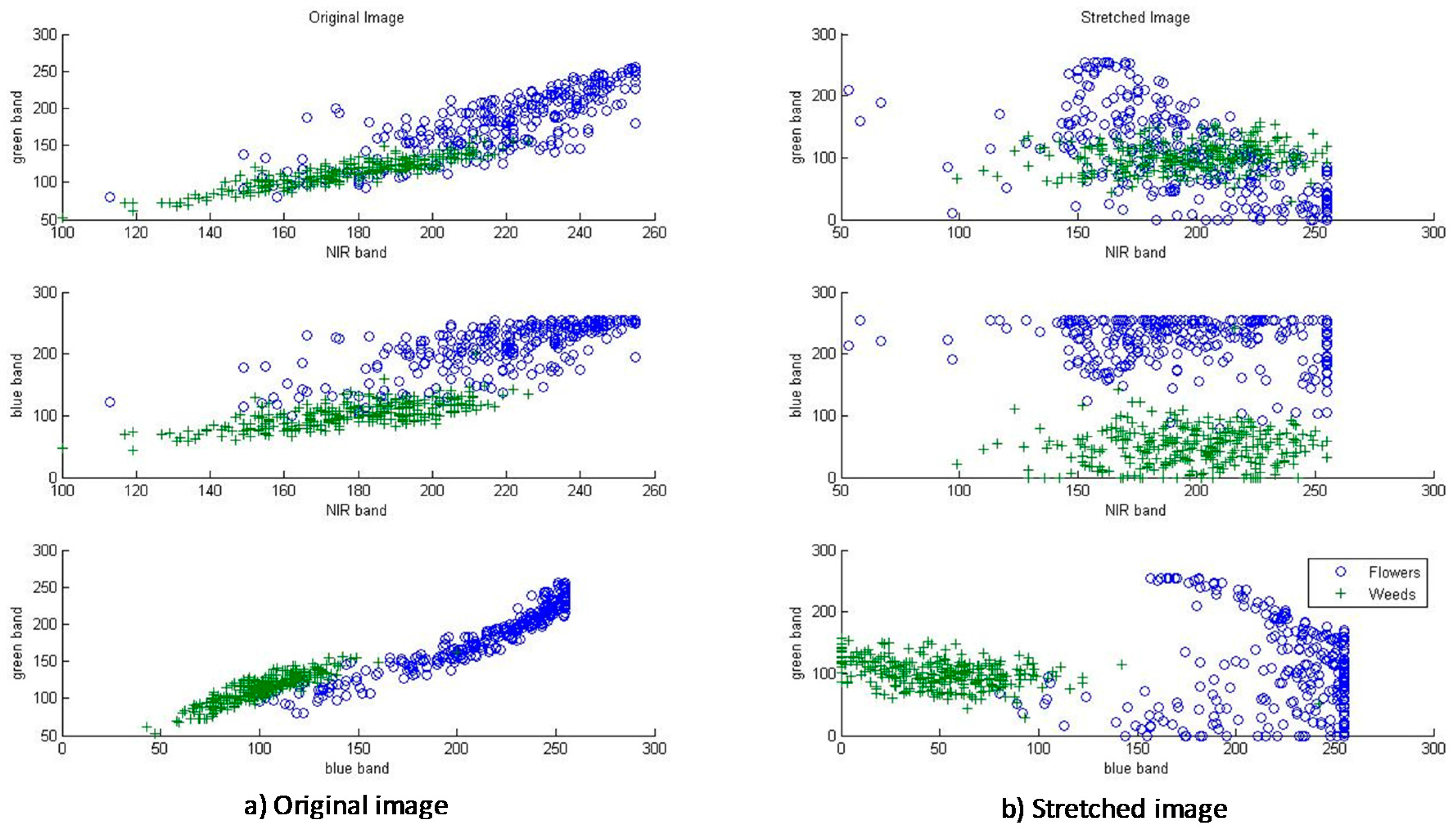
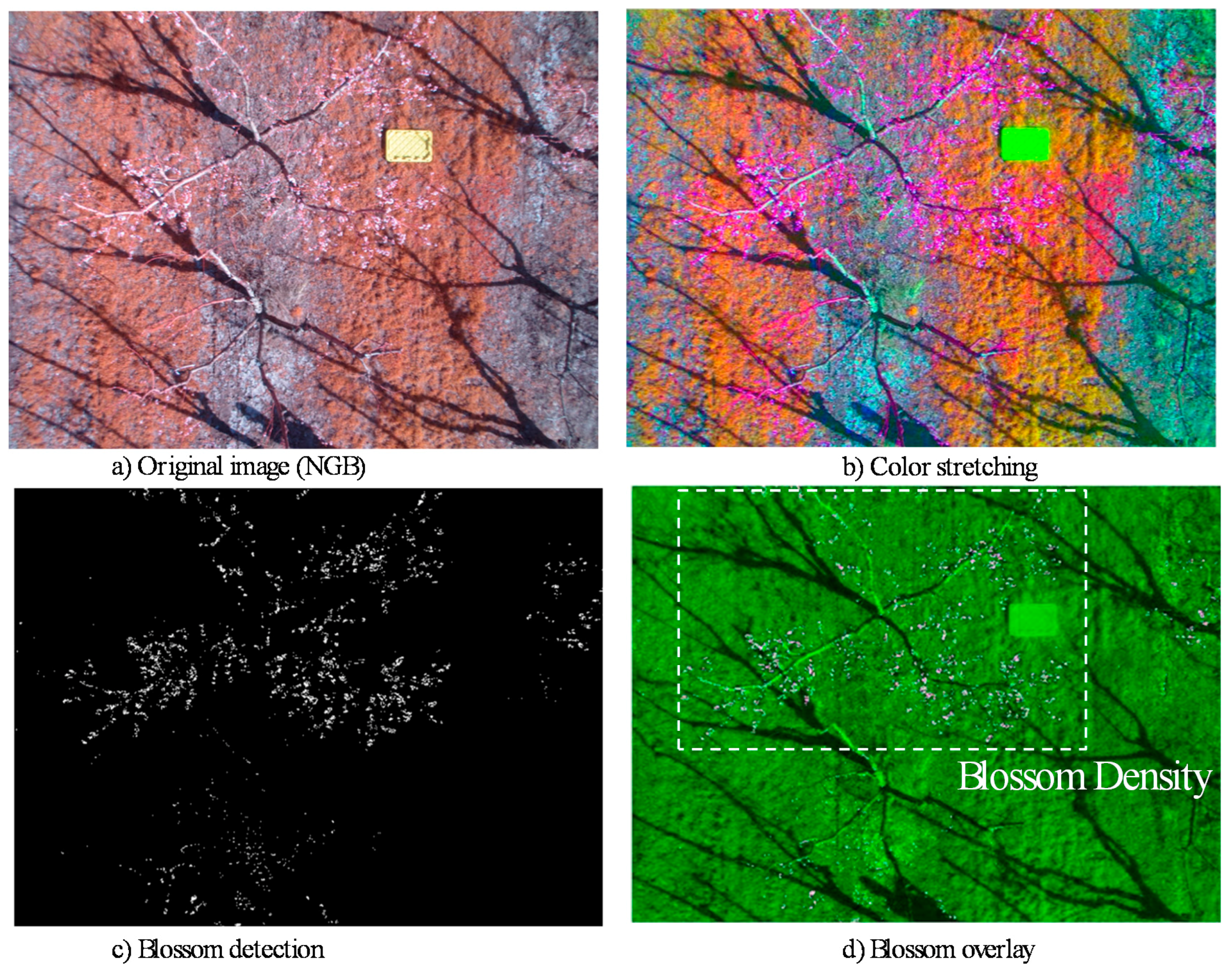
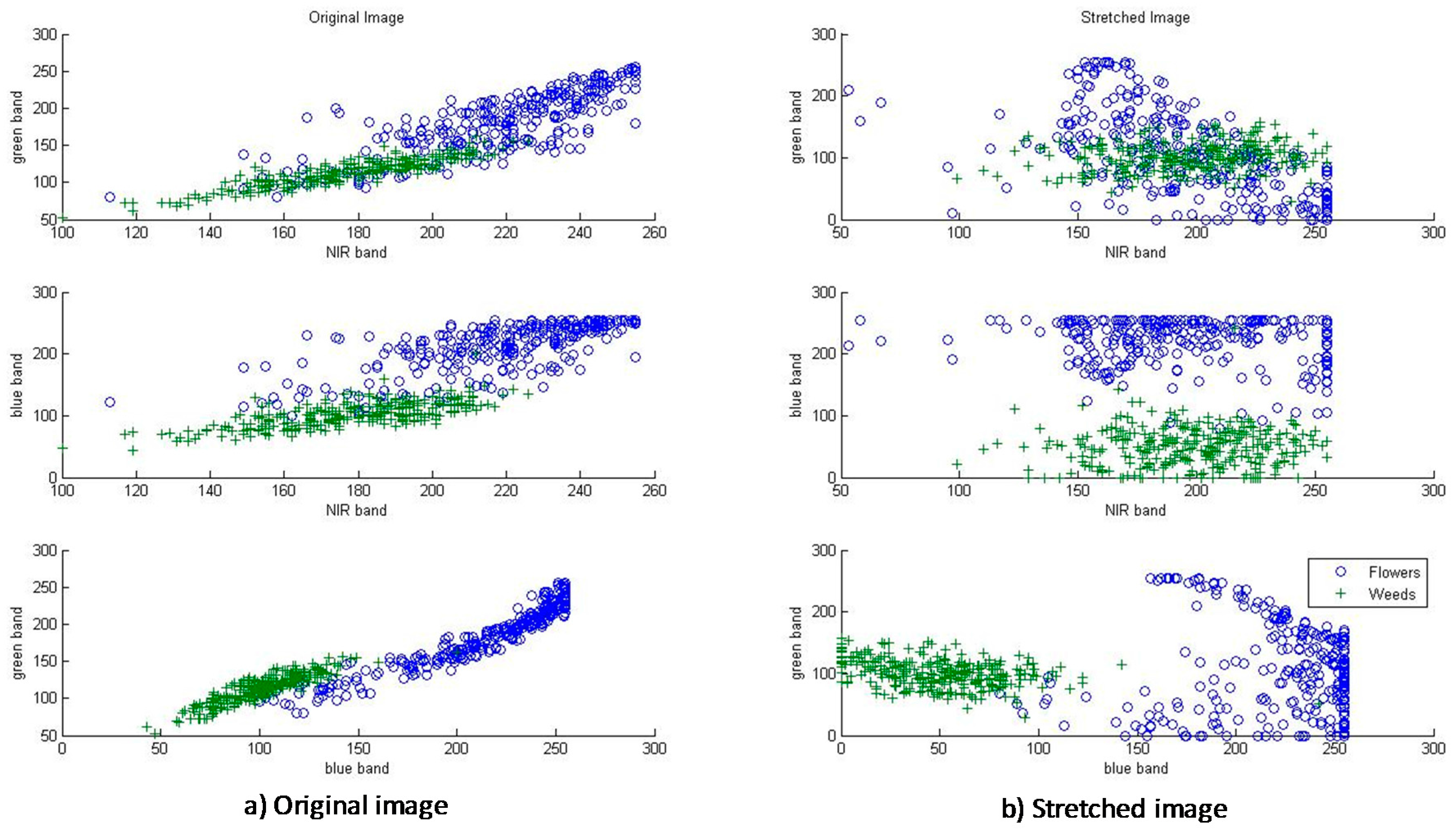
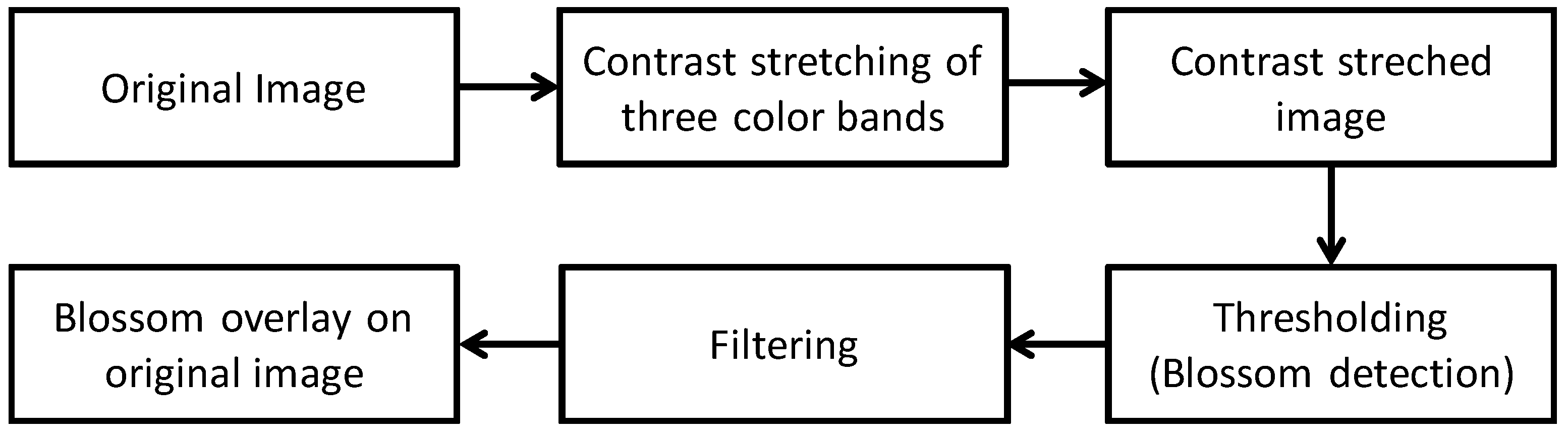
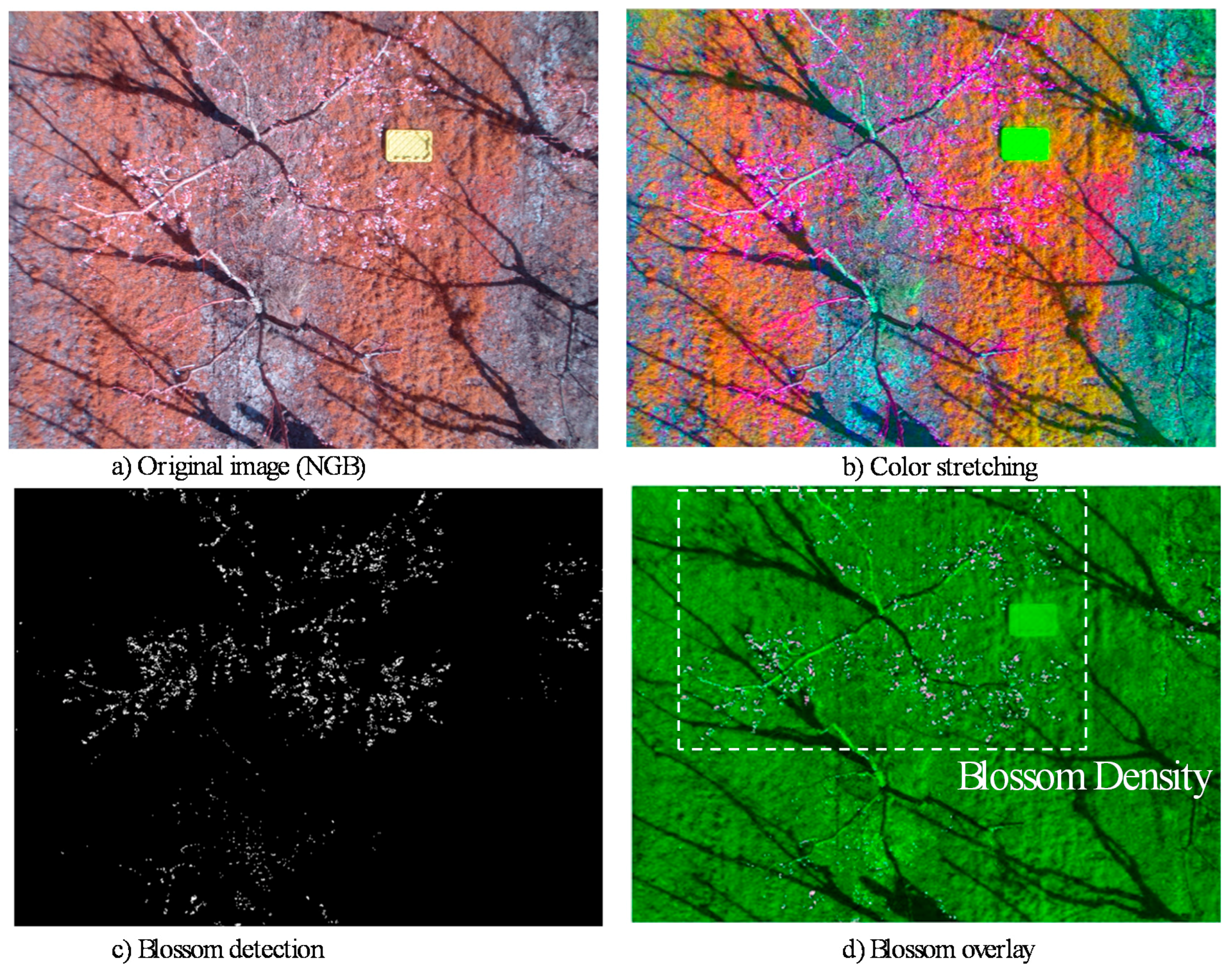
2.5. Image Processing and Analysis
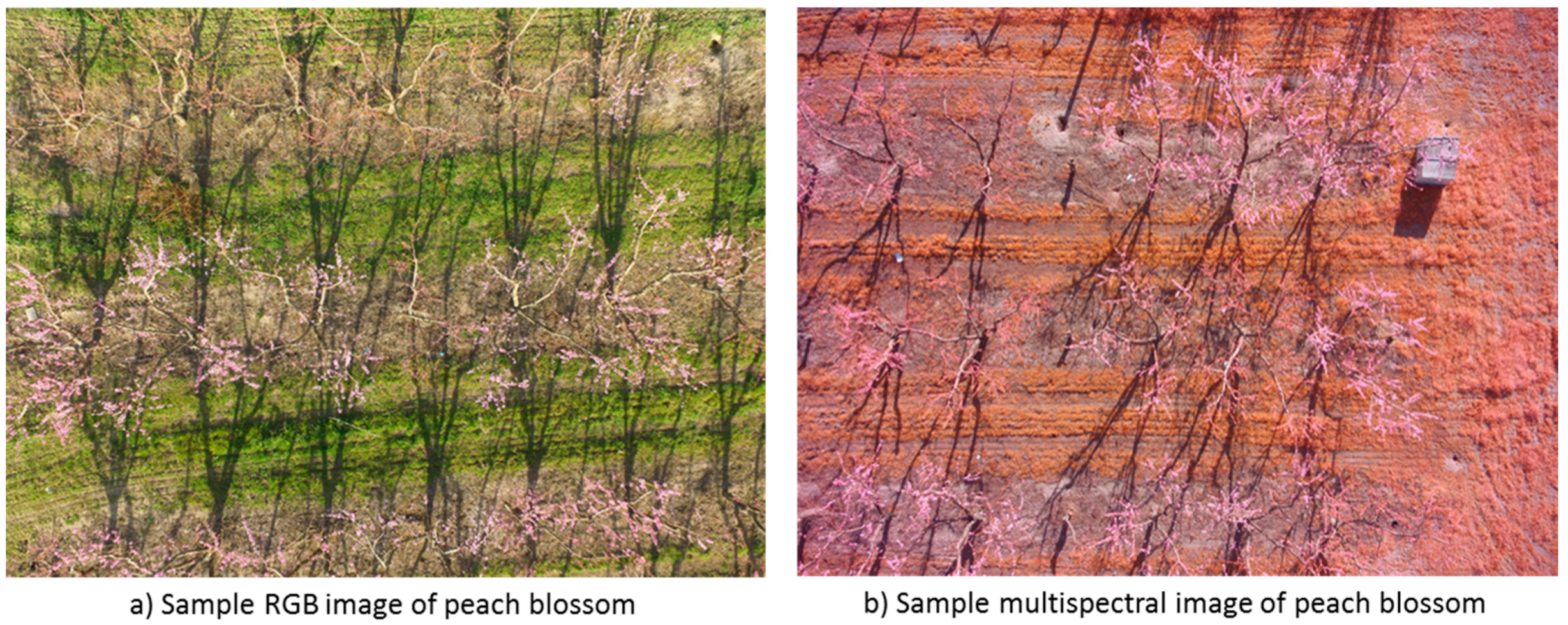
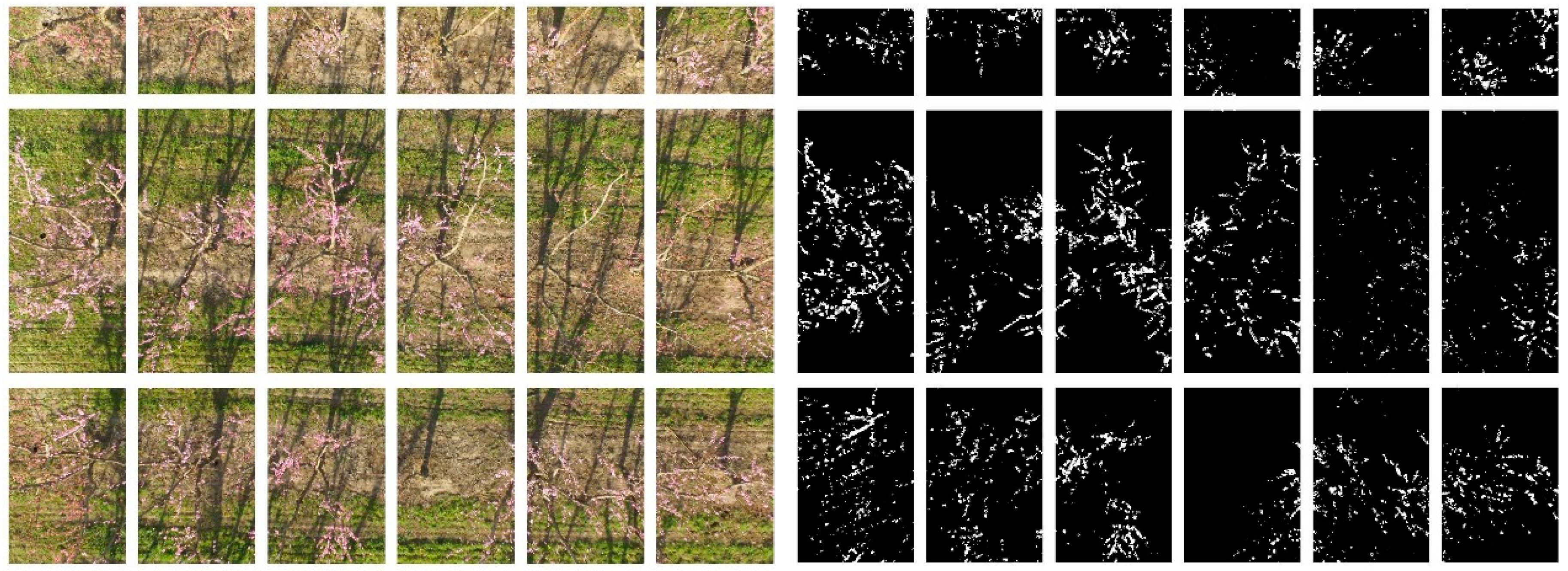
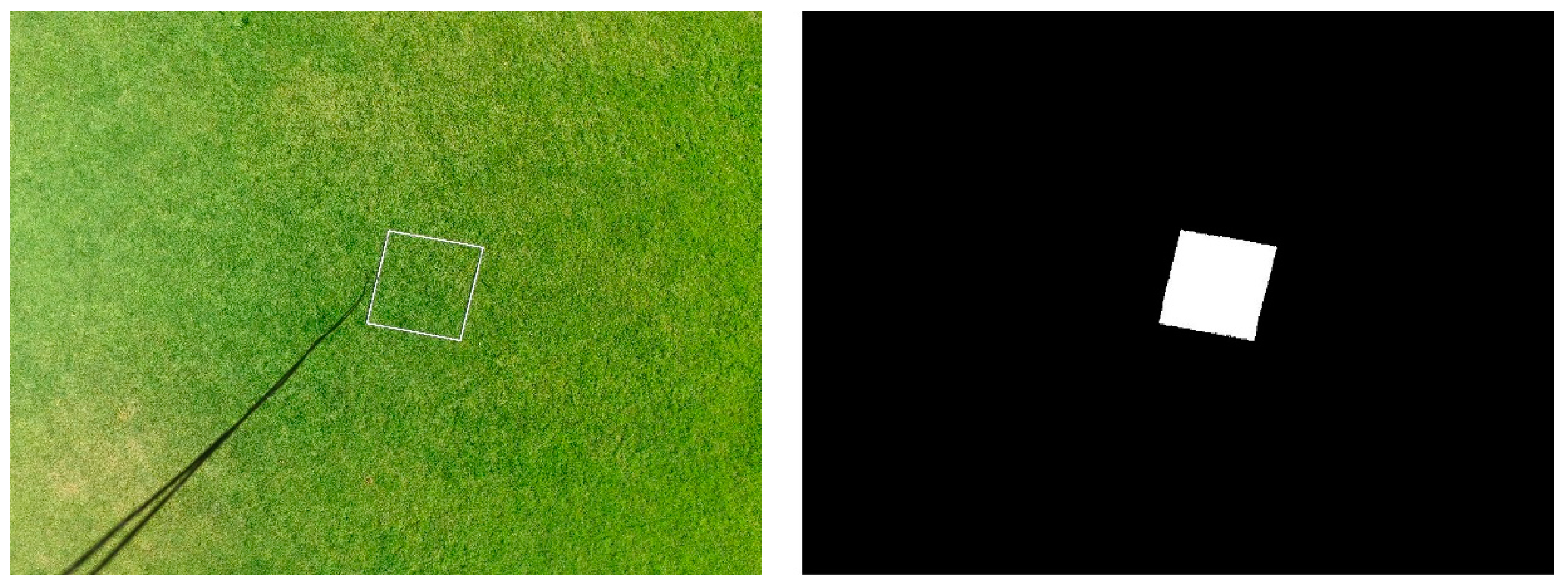
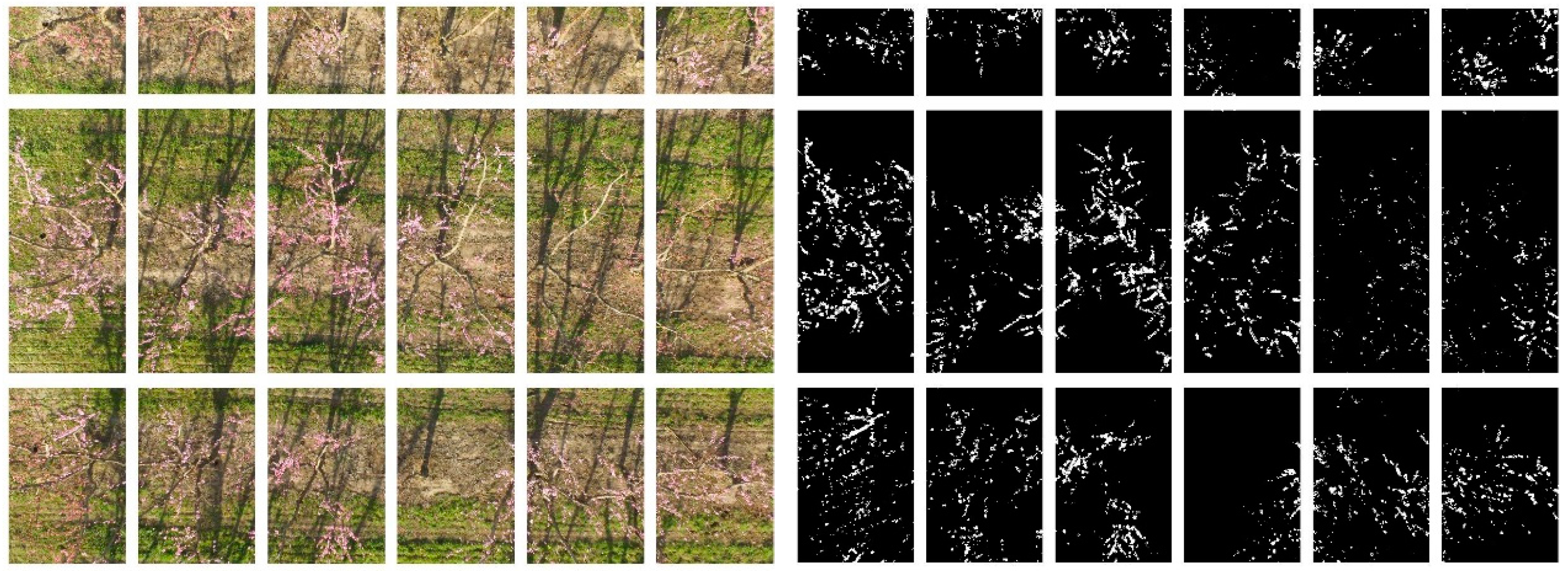
2.6. Peach Blossom Detection
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| C-MAP | Crop monitoring and assessment platform |
| ENDVI | Enhanced Normalized Difference Vegetation Index |
| GPS | Global positioning system |
| NGB | Near infrared, Green, Blue |
| NIR | Near infrared |
| PVC | Polyvinyl chloride |
| RGB | Red, Green, Blue |
| UAS | Unmanned aerial system |
References
- USDA-National Agriculture Statistics Service. State Agriculture Overview (Idaho). Available online: https://www.nass.usda.gov/Quick-Stats/Ag-Overview/stateOverview.php?state=IDAHO (accessed on 30 April 2016).
- Downey, D.R.; Ehsani, K.; Giles, S.; Haneklaus, D.; Karimi, K.; Panten, F.; Pierce, E.; Schnug, D.C.; Slaughter, S.; Upadhyaya, D. Advanced Engineering Systems for Specialty Crops: A Review of Precision Agriculture for Water, Chemical, and Nutrient Application, and Yield Monitoring. Landbauforsch.—VTI Agric. For. Res. 2010, 340, 1–88. [Google Scholar]
- Lee, W.S.; Alchanatis, V.; Yang, C.; Hirafuji, M.; Moshou, D.; Li, C. Sensing technologies for precision specialty crop production. Comput. Electron. Agric. 2010, 74, 2–33. [Google Scholar] [CrossRef]
- Pajares, G. Overview and current status of remote sensing applications based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–329. [Google Scholar] [CrossRef]
- Johnson, A.K.L.; Kinsey-Henderson, A.E. Satellite-based remote sensing for monitoring Baath land use in sugar industry. Proc. Aust. Soc. Sugar Cane Technol. 1997, 19, 237–245. [Google Scholar]
- Li, Z.; Liu, Y.; Walker, R.; Hayward, R.; Zhang, J. Towards automatic power line detection for a UAV surveillance system using pulse coupled neural filter and an improved Hough transform. Mach. Vis. Appl. 2010, 21, 677–686. [Google Scholar] [CrossRef]
- Coifman, B.; McCord, M.; Mishalani, R.G.; Iswalt, M.; Ji, Y. Roadway traffic monitoring from an unmanned aerial vehicle. IEEE Proc. Intell. Trans. Syst. 2006, 153, 11–20. [Google Scholar] [CrossRef]
- Ro, K.; Oh, J.S.; Dong, L. Lessons learned: Application of small UAV for urban highway traffic monitoring. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2007; pp. 2007–2596.
- Boon, W.A.; Greenfield, R.; Tesfamichael, S. Wetland Assessment Using Unmanned Aerial Vehicle (UAV) Photgrammetry. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016.
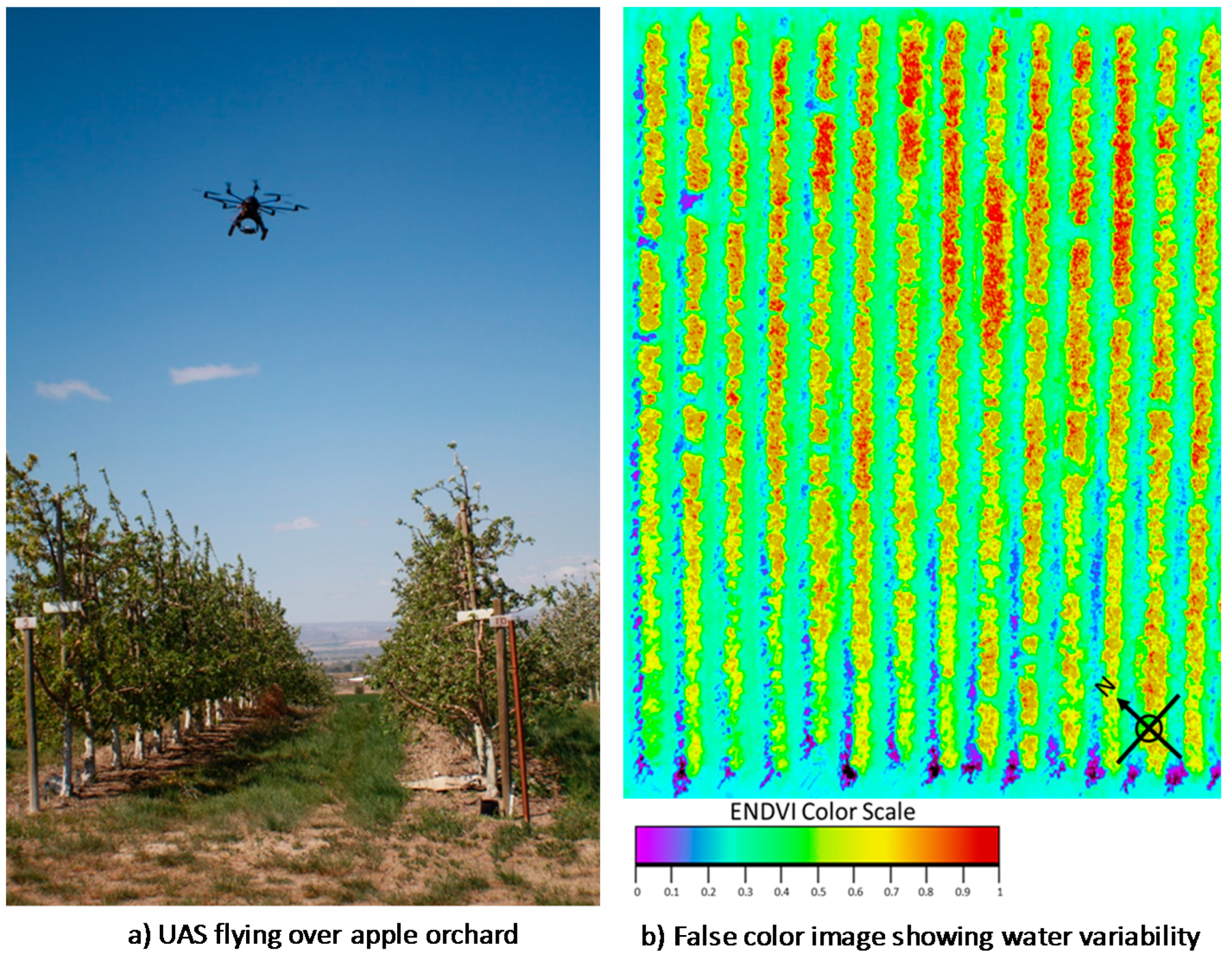
- Bulanon, D.M.; Horton, M.; Salvador, P.; Fallahi, E. Apple Orchard Monitoring Using Aerial Multispectral Imaging; ASABE Paper No. 1913165; American Society of Agricultural and Biological Engineers (ASABE): St. Joseph, MI, USA, 2014. [Google Scholar]
- Bulanon, D.M.; Lonai, J.; Skovgard, H.; Fallahi, E. Evaluation of different irrigation methods for an apple orchard using an aerial imaging system. ISPRS Int. J. Geo-Inf. 2016, 5, 79. [Google Scholar] [CrossRef]
- Fujii, J.A.; Kennedy, R.A. Seasonal changes in the photosynthetic rate in apple trees—A comparison between fruiting and nonfruiting trees. Plant Pysiol. 1985, 78, 519–524. [Google Scholar] [CrossRef]
- Aggelopoulou, K.D.; Wulfsohn, D.; Fountas, S.; Gemtos, T.A.; Nanos, G.D.; Blackmore, S. Spatial variation in yield and quality in a small apple orchard. Precis. Agric. 2010, 11, 538–556. [Google Scholar] [CrossRef]
- Da-Jiang Innovations (DJI). Available online: http://www.dji.com/products/phantom (accessed on 30 December 2016).
- DroneDeploy. Available online: https://www.dronedeploy.com/ (accessed on 30 December 2016).
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Pearson: New York, NY, USA, 2007. [Google Scholar]

© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Horton, R.; Cano, E.; Bulanon, D.; Fallahi, E. Peach Flower Monitoring Using Aerial Multispectral Imaging. J. Imaging 2017, 3, 2. https://doi.org/10.3390/jimaging3010002
Horton R, Cano E, Bulanon D, Fallahi E. Peach Flower Monitoring Using Aerial Multispectral Imaging. Journal of Imaging. 2017; 3(1):2. https://doi.org/10.3390/jimaging3010002
Chicago/Turabian StyleHorton, Ryan, Esteban Cano, Duke Bulanon, and Esmaeil Fallahi. 2017. "Peach Flower Monitoring Using Aerial Multispectral Imaging" Journal of Imaging 3, no. 1: 2. https://doi.org/10.3390/jimaging3010002
APA StyleHorton, R., Cano, E., Bulanon, D., & Fallahi, E. (2017). Peach Flower Monitoring Using Aerial Multispectral Imaging. Journal of Imaging, 3(1), 2. https://doi.org/10.3390/jimaging3010002