


Plant Detection in RGB Images from Unmanned Aerial Vehicles Using Segmentation by Deep Learning and an Impact of Model Accuracy on Downstream Analysis

 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Image Acquisition and Construction of Orthomosaics
2.2. Image Datasets
2.2.1. Data from Russian Regions During 2019–2023
2.2.2. Public Datasets
2.2.3. Data Stratification
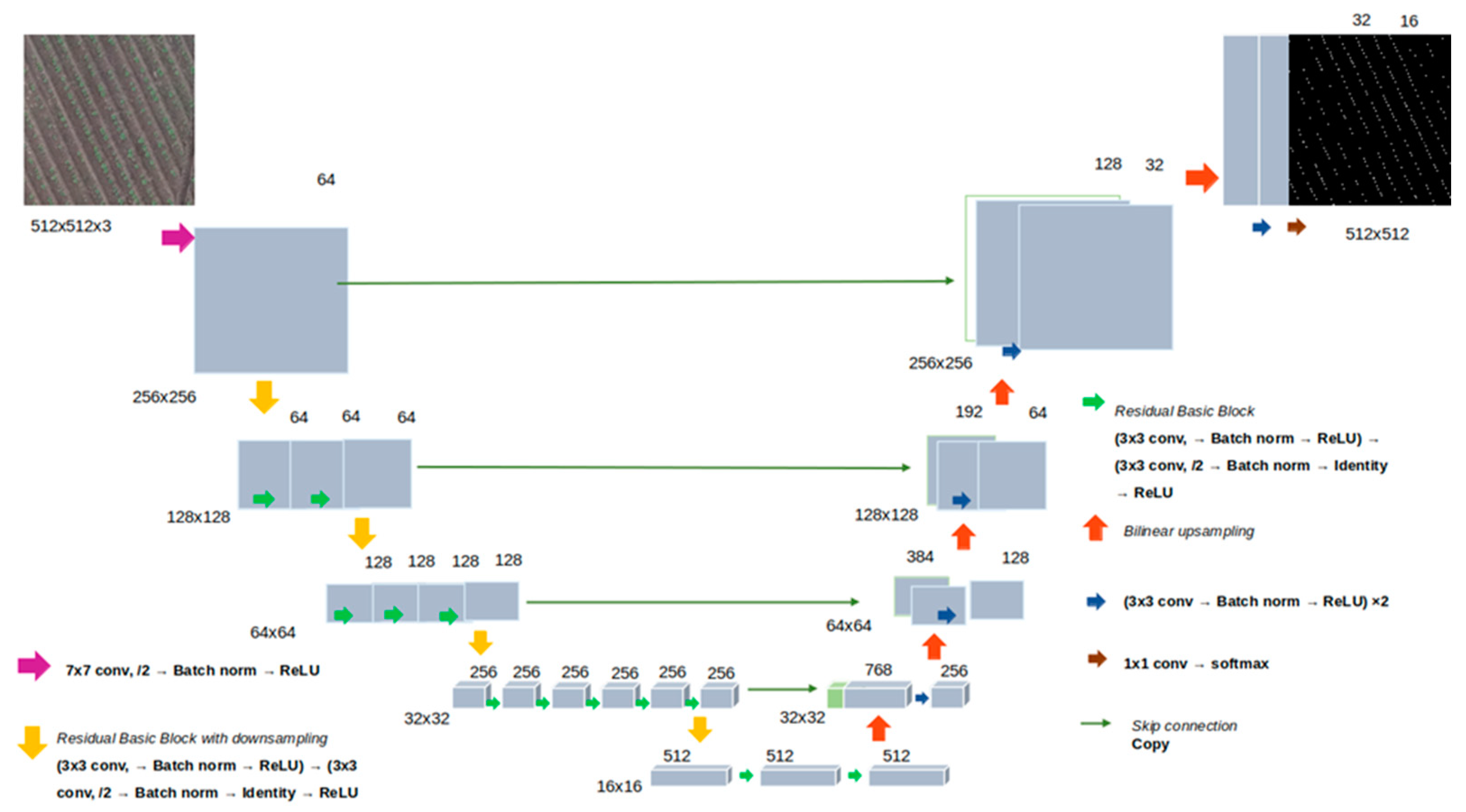
2.3. Neural Network Architecture and Learning Algorithms
2.4. Evaluating Accuracy of Plant Identification
2.5. The Downstream Analysis of the Processed Orthomosaics
3. Results
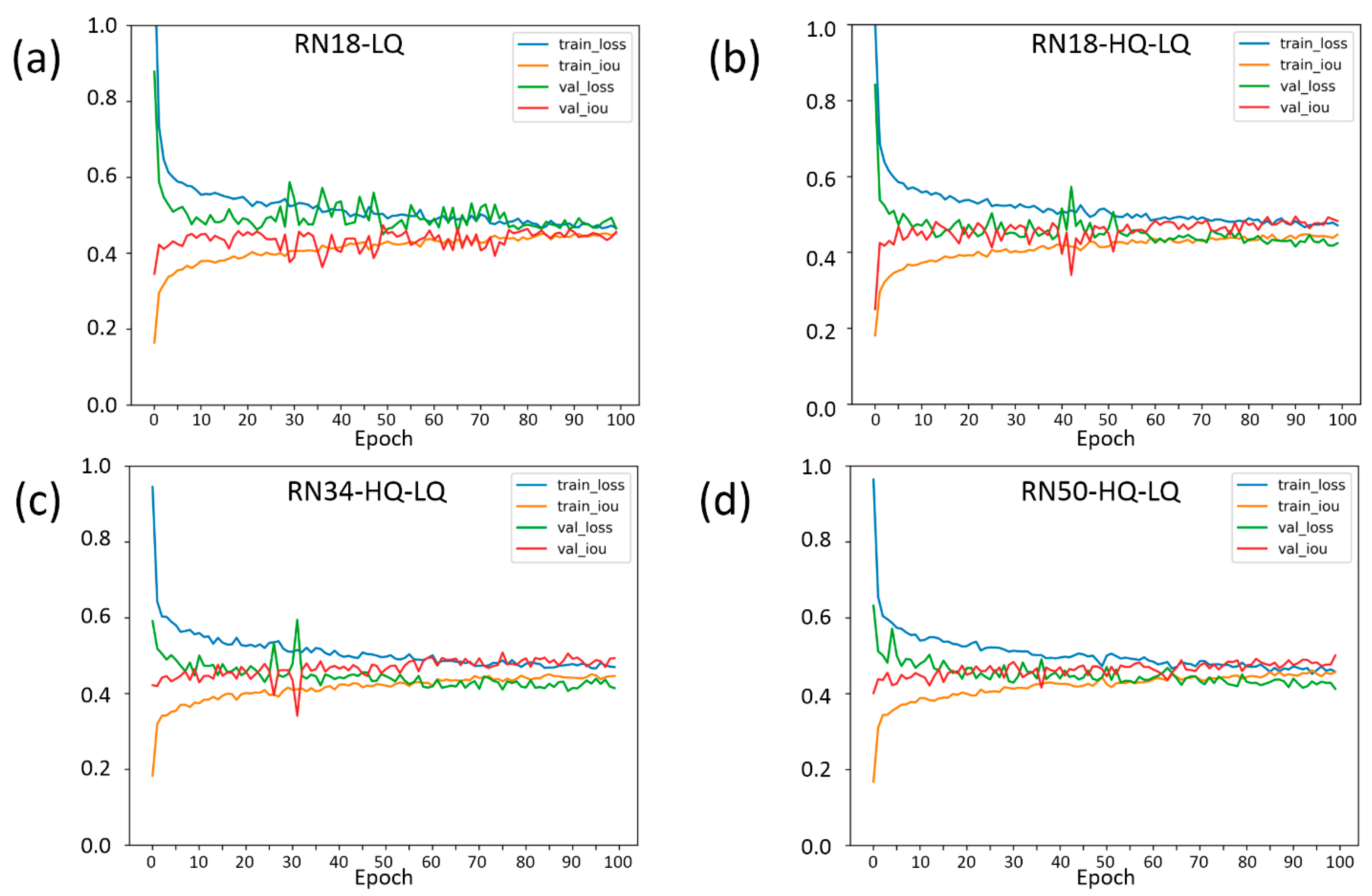
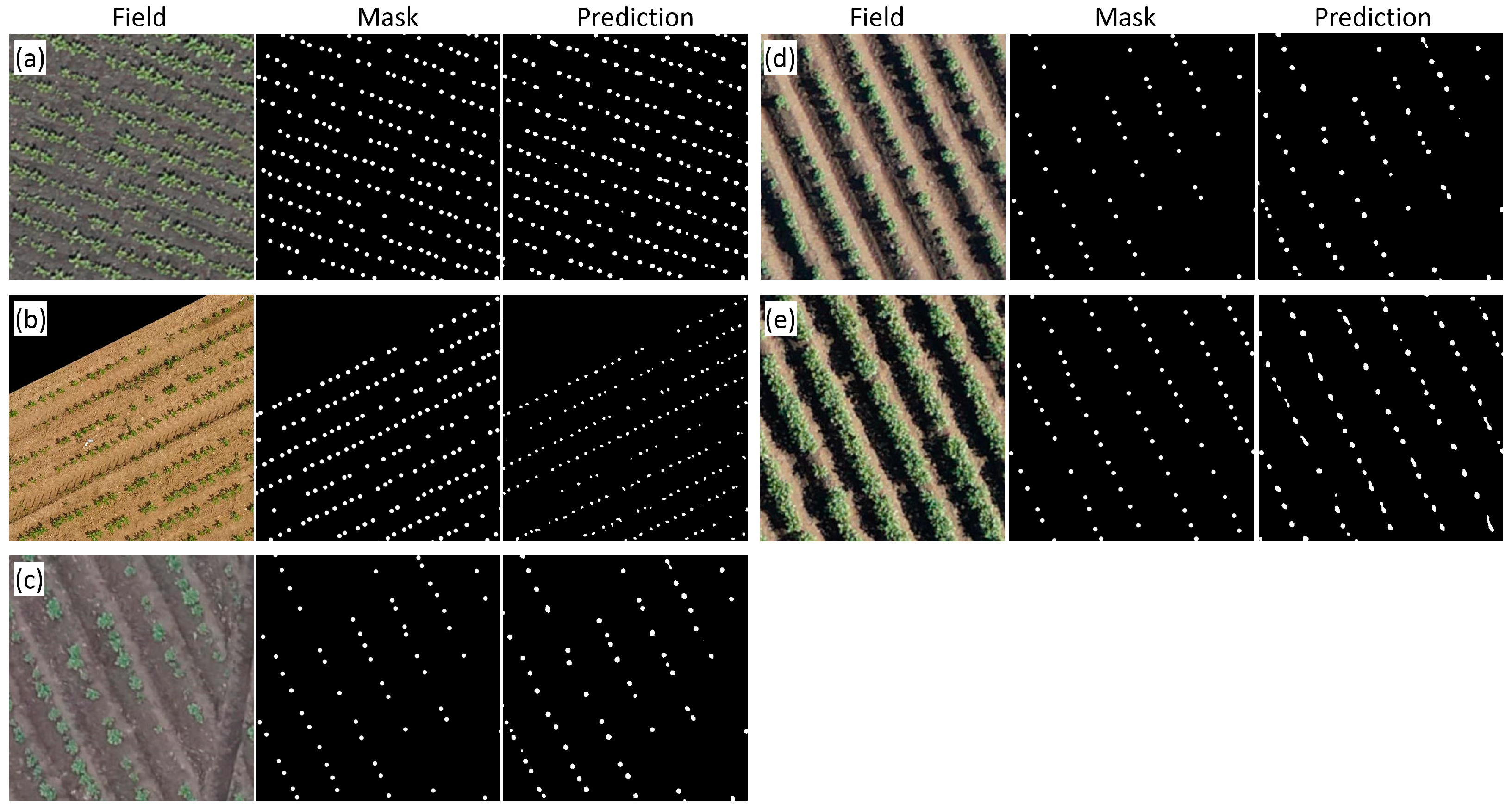
3.1. The Evaluation of the Accuracy of Plant Identification in Different Experiments
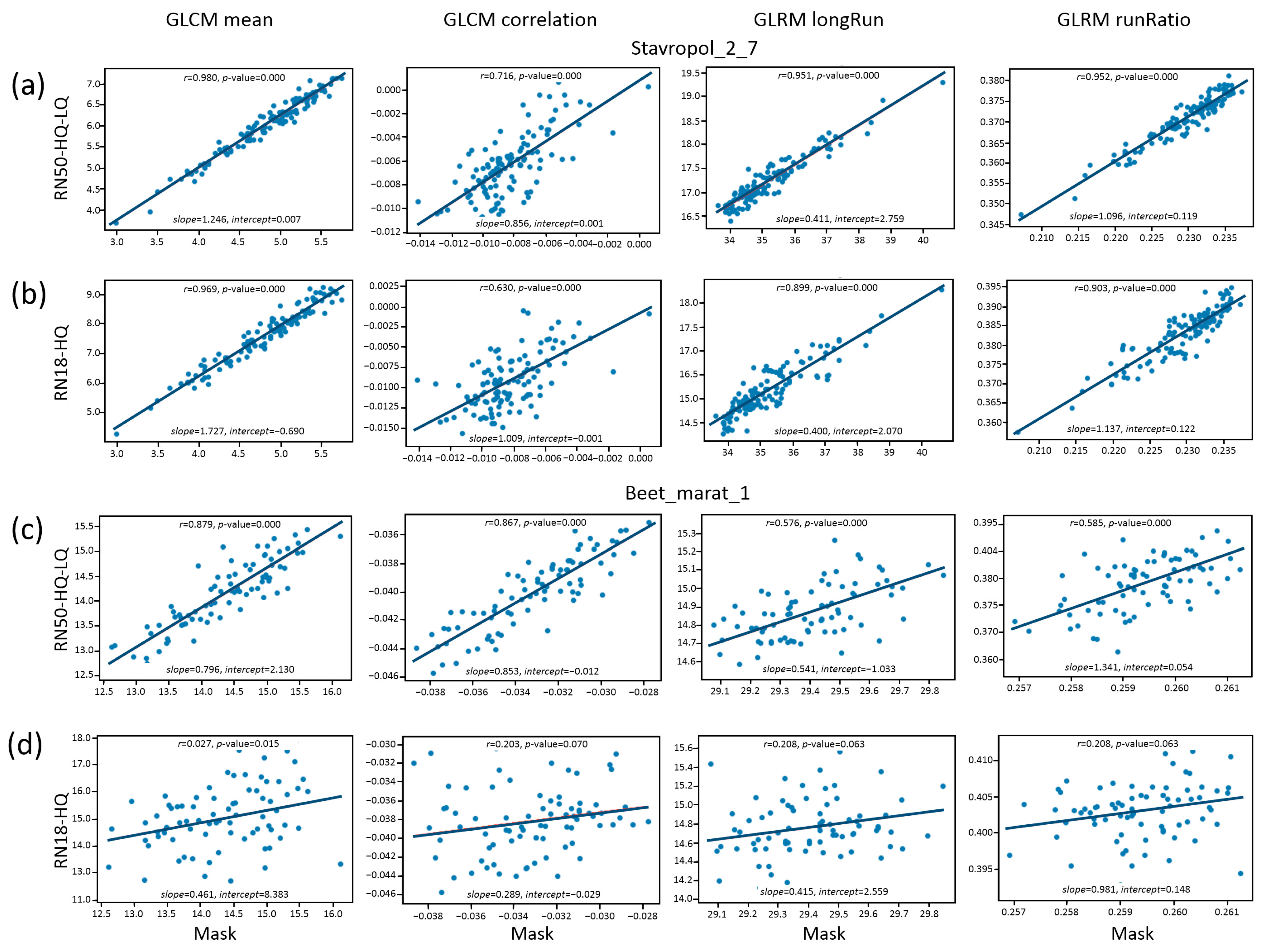
3.2. The Influence of Plant Identification Accuracy on Subsequent Analysis
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Velusamy, P.; Rajendran, S.; Mahendran, R.K.; Naseer, S.; Shafiq, M.; Choi, J.-G. Unmanned Aerial Vehicles (UAV) in Precision Agriculture: Applications and Challenges. Energies 2021, 15, 217. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A Compilation of UAV Applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Shu, M.; Fei, S.; Zhang, B.; Yang, X.; Guo, Y.; Li, B.; Ma, Y. Application of UAV Multisensor Data and Ensemble Approach for High-Throughput Estimation of Maize Phenotyping Traits. Plant Phenomics 2022, 2022, 9802585. [Google Scholar] [CrossRef]
- Guo, W.; Carroll, M.E.; Singh, A.; Swetnam, T.L.; Merchant, N.; Sarkar, S.; Singh, A.K.; Ganapathysubramanian, B. UAS-Based Plant Phenotyping for Research and Breeding Applications. Plant Phenomics 2021, 2021, 9840192. [Google Scholar] [CrossRef] [PubMed]
- Ge, X.; Ding, J.; Jin, X.; Wang, J.; Chen, X.; Li, X.; Liu, J.; Xie, B. Estimating Agricultural Soil Moisture Content through UAV-Based Hyperspectral Images in the Arid Region. Remote Sens. 2021, 13, 1562. [Google Scholar] [CrossRef]
- Bah, M.D.; Hafiane, A.; Canals, R. Deep Learning with Unsupervised Data Labeling for Weed Detection in Line Crops in UAV Images. Remote Sens. 2018, 10, 1690. [Google Scholar] [CrossRef]
- Liu, S.; Jin, X.; Nie, C.; Wang, S.; Yu, X.; Cheng, M.; Shao, M.; Wang, Z.; Tuohuti, N.; Bai, Y.; et al. Estimating Leaf Area Index Using Unmanned Aerial Vehicle Data: Shallow vs. Deep Machine Learning Algorithms. Plant Physiol. 2021, 187, 1551–1576. [Google Scholar] [CrossRef] [PubMed]
- Hu, P.; Chapman, S.C.; Zheng, B. Coupling of Machine Learning Methods to Improve Estimation of Ground Coverage from Unmanned Aerial Vehicle (UAV) Imagery for High-Throughput Phenotyping of Crops. Funct. Plant Biol. 2021, 48, 766–779. [Google Scholar] [CrossRef]
- Sahoo, R.N.; Rejith, R.G.; Gakhar, S.; Ranjan, R.; Meena, M.C.; Dey, A.; Mukherjee, J.; Dhakar, R.; Meena, A.; Daas, A.; et al. Drone Remote Sensing of Wheat N Using Hyperspectral Sensor and Machine Learning. Precis. Agric. 2024, 25, 704–728. [Google Scholar] [CrossRef]
- Volpato, L.; Pinto, F.; González-Pérez, L.; Thompson, I.G.; Borém, A.; Reynolds, M.; Gérard, B.; Molero, G.; Rodrigues, F.A. High Throughput Field Phenotyping for Plant Height Using UAV-Based RGB Imagery in Wheat Breeding Lines: Feasibility and Validation. Front. Plant Sci. 2021, 12, 591587. [Google Scholar] [CrossRef] [PubMed]
- Antolínez García, A.; Cáceres Campana, J.W. Identification of Pathogens in Corn Using Near-Infrared UAV Imagery and Deep Learning. Precis. Agric. 2023, 24, 783–806. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, L.; Han, J.; Yu, J.; Huang, K. A near Real-Time Deep Learning Approach for Detecting Rice Phenology Based on UAV Images. Agric. For. Meteorol. 2020, 287, 107938. [Google Scholar] [CrossRef]
- Sadeghi-Tehran, P.; Sabermanesh, K.; Virlet, N.; Hawkesford, M.J. Automated Method to Determine Two Critical Growth Stages of Wheat: Heading and Flowering. Front. Plant Sci. 2017, 8, 252. [Google Scholar] [CrossRef] [PubMed]
- Feng, A.; Zhou, J.; Vories, E.; Sudduth, K.A. Prediction of Cotton Yield Based on Soil Texture, Weather Conditions and UAV Imagery Using Deep Learning. Precis. Agric. 2024, 25, 303–326. [Google Scholar] [CrossRef]
- Xu, X.; Nie, C.; Jin, X.; Li, Z.; Zhu, H.; Xu, H.; Wang, J.; Zhao, Y.; Feng, H. A Comprehensive Yield Evaluation Indicator Based on an Improved Fuzzy Comprehensive Evaluation Method and Hyperspectral Data. Field Crops Res. 2021, 270, 108204. [Google Scholar] [CrossRef]
- Yang, T.; Zhang, W.; Zhou, T.; Wu, W.; Liu, T.; Sun, C. Plant Phenomics & Precision Agriculture Simulation of Winter Wheat Growth by the Assimilation of Unmanned Aerial Vehicle Imagery into the WOFOST Model. PLoS ONE 2021, 16, e0246874. [Google Scholar] [CrossRef]
- Pathak, H.; Igathinathane, C.; Zhang, Z.; Archer, D.; Hendrickson, J. A Review of Unmanned Aerial Vehicle-Based Methods for Plant Stand Count Evaluation in Row Crops. Comput. Electron. Agric. 2022, 198, 107064. [Google Scholar] [CrossRef]
- Booth, D.T.; Cox, S.E.; Meikle, T.; Zuuring, H.R. Ground-Cover Measurements: Assessing Correlation Among Aerial and Ground-Based Methods. Environ. Manag. 2008, 42, 1091–1100. [Google Scholar] [CrossRef] [PubMed]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of Plant Density of Wheat Crops at Emergence from Very Low Altitude UAV Imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef]
- Valente, J.; Sari, B.; Kooistra, L.; Kramer, H.; Mücher, S. Automated Crop Plant Counting from Very High-Resolution Aerial Imagery. Precis. Agric. 2020, 21, 1366–1384. [Google Scholar] [CrossRef]
- Buters, T.; Belton, D.; Cross, A. Seed and Seedling Detection Using Unmanned Aerial Vehicles and Automated Image Classification in the Monitoring of Ecological Recovery. Drones 2019, 3, 53. [Google Scholar] [CrossRef]
- Lu, D.; Ye, J.; Wang, Y.; Yu, Z. Plant Detection and Counting: Enhancing Precision Agriculture in UAV and General Scenes. IEEE Access 2023, 11, 116196–116205. [Google Scholar] [CrossRef]
- Bai, Y.; Nie, C.; Wang, H.; Cheng, M.; Liu, S.; Yu, X.; Shao, M.; Wang, Z.; Wang, S.; Tuohuti, N.; et al. A Fast and Robust Method for Plant Count in Sunflower and Maize at Different Seedling Stages Using High-Resolution UAV RGB Imagery. Precis. Agric. 2022, 23, 1720–1742. [Google Scholar] [CrossRef]
- Calvario, G.; Alarcón, T.E.; Dalmau, O.; Sierra, B.; Hernandez, C. An Agave Counting Methodology Based on Mathematical Morphology and Images Acquired through Unmanned Aerial Vehicles. Sensors 2020, 20, 6247. [Google Scholar] [CrossRef]
- Alt, V.V.; Pestunov, I.A.; Melnikov, P.V.; Elkin, O.V. Automated Detection of Weeds and Evaluation of Crop Sprouts Quality Based on RGB Images. Sib. Her. Agric. Sci. 2019, 48, 52–60. [Google Scholar] [CrossRef]
- Chebrolu, N.; Labe, T.; Stachniss, C. Robust Long-Term Registration of UAV Images of Crop Fields for Precision Agriculture. IEEE Robot. Autom. Lett. 2018, 3, 3097–3104. [Google Scholar] [CrossRef]
- García-Martínez, H.; Flores-Magdaleno, H.; Khalil-Gardezi, A.; Ascencio-Hernández, R.; Tijerina-Chávez, L.; Vázquez-Peña, M.A.; Mancilla-Villa, O.R. Digital Count of Corn Plants Using Images Taken by Unmanned Aerial Vehicles and Cross Correlation of Templates. Agronomy 2020, 10, 469. [Google Scholar] [CrossRef]
- Osco, L.P.; Marcato Junior, J.; Marques Ramos, A.P.; De Castro Jorge, L.A.; Fatholahi, S.N.; De Andrade Silva, J.; Matsubara, E.T.; Pistori, H.; Gonçalves, W.N.; Li, J. A Review on Deep Learning in UAV Remote Sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102456. [Google Scholar] [CrossRef]
- Alzubaidi, L.; Zhang, J.; Humaidi, A.J.; Al-Dujaili, A.; Duan, Y.; Al-Shamma, O.; Santamaría, J.; Fadhel, M.A.; Al-Amidie, M.; Farhan, L. Review of Deep Learning: Concepts, CNN Architectures, Challenges, Applications, Future Directions. J. Big Data 2021, 8, 53. [Google Scholar] [CrossRef] [PubMed]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep Learning in Agriculture: A Survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- Mohimont, L.; Alin, F.; Rondeau, M.; Gaveau, N.; Steffenel, L.A. Computer Vision and Deep Learning for Precision Viticulture. Agronomy 2022, 12, 2463. [Google Scholar] [CrossRef]
- Hafiz, A.M.; Bhat, G.M. A Survey on Instance Segmentation: State of the Art. Int. J. Multimed. Inf. Retr. 2020, 9, 171–189. [Google Scholar] [CrossRef]
- Hoeser, T.; Kuenzer, C. Object Detection and Image Segmentation with Deep Learning on Earth Observation Data: A Review-Part I: Evolution and Recent Trends. Remote Sens. 2020, 12, 1667. [Google Scholar] [CrossRef]
- Mittal, P.; Singh, R.; Sharma, A. Deep Learning-Based Object Detection in Low-Altitude UAV Datasets: A Survey. Image Vis. Comput. 2020, 104, 104046. [Google Scholar] [CrossRef]
- Barreto, A.; Lottes, P.; Ispizua Yamati, F.R.; Baumgarten, S.; Wolf, N.A.; Stachniss, C.; Mahlein, A.-K.; Paulus, S. Automatic UAV-Based Counting of Seedlings in Sugar-Beet Field and Extension to Maize and Strawberry. Comput. Electron. Agric. 2021, 191, 106493. [Google Scholar] [CrossRef]
- Lottes, P.; Behley, J.; Milioto, A.; Stachniss, C. Fully Convolutional Networks with Sequential Information for Robust Crop and Weed Detection in Precision Farming. IEEE Robot. Autom. Lett. 2018, 3, 2870–2877. [Google Scholar] [CrossRef]
- Vong, C.N.; Conway, L.S.; Zhou, J.; Kitchen, N.R.; Sudduth, K.A. Early Corn Stand Count of Different Cropping Systems Using UAV-Imagery and Deep Learning. Comput. Electron. Agric. 2021, 186, 106214. [Google Scholar] [CrossRef]
- Zhang, C.; Atkinson, P.M.; George, C.; Wen, Z.; Diazgranados, M.; Gerard, F. Identifying and Mapping Individual Plants in a Highly Diverse High-Elevation Ecosystem Using UAV Imagery and Deep Learning. ISPRS J. Photogramm. Remote Sens. 2020, 169, 280–291. [Google Scholar] [CrossRef]
- Kitano, B.T.; Mendes, C.C.T.; Geus, A.R.; Oliveira, H.C.; Souza, J.R. Corn Plant Counting Using Deep Learning and UAV Images. IEEE Geosci. Remote Sens. Lett. 2024, 1–5. [Google Scholar] [CrossRef]
- Li, F.; Bai, J.; Zhang, M.; Zhang, R. Yield Estimation of High-Density Cotton Fields Using Low-Altitude UAV Imaging and Deep Learning. Plant Methods 2022, 18, 55. [Google Scholar] [CrossRef] [PubMed]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Ding, R.; Luo, J.; Wang, C.; Yu, L.; Yang, J.; Wang, M.; Zhong, S.; Gu, R. Identifying and Mapping Individual Medicinal Plant Lamiophlomis Rotata at High Elevations by Using Unmanned Aerial Vehicles and Deep Learning. Plant Methods 2023, 19, 38. [Google Scholar] [CrossRef] [PubMed]
- Machefer, M.; Lemarchand, F.; Bonnefond, V.; Hitchins, A.; Sidiropoulos, P. Mask R-CNN Refitting Strategy for Plant Counting and Sizing in UAV Imagery. Remote Sens. 2020, 12, 3015. [Google Scholar] [CrossRef]
- David, E.; Daubige, G.; Joudelat, F.; Burger, P.; Comar, A.; De Solan, B.; Baret, F. Plant Detection and Counting from High-Resolution RGB Images Acquired from UAVs: Comparison between Deep-Learning and Handcrafted Methods with Application to Maize, Sugar Beet, and Sunflower. bioRxiv 2022. [Google Scholar] [CrossRef]
- Hosseiny, B.; Rastiveis, H.; Homayouni, S. An Automated Framework for Plant Detection Based on Deep Simulated Learning from Drone Imagery. Remote Sens. 2020, 12, 3521. [Google Scholar] [CrossRef]
- Mhango, J.K.; Harris, E.W.; Green, R.; Monaghan, J.M. Mapping Potato Plant Density Variation Using Aerial Imagery and Deep Learning Techniques for Precision Agriculture. Remote Sens. 2021, 13, 2705. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Oh, S.; Chang, A.; Ashapure, A.; Jung, J.; Dube, N.; Maeda, M.; Gonzalez, D.; Landivar, J. Plant Counting of Cotton from UAS Imagery Using Deep Learning-Based Object Detection Framework. Remote Sens. 2020, 12, 2981. [Google Scholar] [CrossRef]
- Li, H.; Wang, P.; Huang, C. Comparison of Deep Learning Methods for Detecting and Counting Sorghum Heads in UAV Imagery. Remote Sens. 2022, 14, 3143. [Google Scholar] [CrossRef]
- Wang, B.; Zhou, J.; Costa, M.; Kaeppler, S.M.; Zhang, Z. Plot-Level Maize Early Stage Stand Counting and Spacing Detection Using Advanced Deep Learning Algorithms Based on UAV Imagery. Agronomy 2023, 13, 1728. [Google Scholar] [CrossRef]
- Osco, L.P.; Nogueira, K.; Marques Ramos, A.P.; Faita Pinheiro, M.M.; Furuya, D.E.G.; Gonçalves, W.N.; De Castro Jorge, L.A.; Marcato Junior, J.; Dos Santos, J.A. Semantic Segmentation of Citrus-Orchard Using Deep Neural Networks and Multispectral UAV-Based Imagery. Precis. Agric. 2021, 22, 1171–1188. [Google Scholar] [CrossRef]
- Vong, C.N.; Conway, L.S.; Feng, A.; Zhou, J.; Kitchen, N.R.; Sudduth, K.A. Corn Emergence Uniformity Estimation and Mapping Using UAV Imagery and Deep Learning. Comput. Electron. Agric. 2022, 198, 107008. [Google Scholar] [CrossRef]
- Pérez-Ortiz, M.; Peña, J.M.; Gutiérrez, P.A.; Torres-Sánchez, J.; Hervás-Martínez, C.; López-Granados, F. Selecting Patterns and Features for Between- and within- Crop-Row Weed Mapping Using UAV-Imagery. Expert Syst. Appl. 2016, 47, 85–94. [Google Scholar] [CrossRef]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-Based Crop and Weed Classification for Smart Farming. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; IEEE: Singapore, 2017; pp. 3024–3031. [Google Scholar]
- Kamath, R.; Balachandra, M.; Prabhu, S. Crop and Weed Discrimination Using Laws’ Texture Masks. Int. J. Agric. Biol. Eng. 2020, 13, 191–197. [Google Scholar] [CrossRef]
- Chetverikov, D. Pattern Regularity as a Visual Key. Image Vis. Comp. 2000, 18, 975–985. [Google Scholar] [CrossRef]
- Ngan, H.Y.T.; Pang, G.K.H. Regularity Analysis for Patterned Texture Inspection. IEEE Trans. Automat. Sci. Eng. 2009, 6, 131–144. [Google Scholar] [CrossRef]
- Sun, H.-C.; Kingdom, F.A.A.; Baker, C.L. Perceived Regularity of a Texture Is Influenced by the Regularity of a Surrounding Texture. Sci. Rep. 2019, 9, 1637. [Google Scholar] [CrossRef] [PubMed]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2015; Volume 9351, pp. 234–241. ISBN 978-3-319-24573-7. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Drozdzal, M.; Vorontsov, E.; Chartrand, G.; Kadoury, S.; Pal, C. The Importance of Skip Connections in Biomedical Image Segmentation. In Deep Learning and Data Labeling for Medical Applications; Carneiro, G., Mateus, D., Peter, L., Bradley, A., Tavares, J.M.R.S., Belagiannis, V., Papa, J.P., Nascimento, J.C., Loog, M., Lu, Z., et al., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2016; Volume 10008, pp. 179–187. ISBN 978-3-319-46975-1. [Google Scholar]
- Buslaev, A.; Iglovikov, V.I.; Khvedchenya, E.; Parinov, A.; Druzhinin, M.; Kalinin, A.A. Albumentations: Fast and Flexible Image Augmentations. Information 2020, 11, 125. [Google Scholar] [CrossRef]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Newton, MA, USA, 2008. [Google Scholar]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural Features for Image Classification. IEEE Trans.Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef]
- Majumdar, S.; Jayas, D.S. Classification of Bulk Samples of Cereal Grains Using Machine Vision. J. Agric. Eng. Res. 1999, 73, 35–47. [Google Scholar] [CrossRef]
- Galloway, M.M. Texture Analysis Using Gray Level Run Lengths. Comput. Graph. Image Process. 1975, 4, 172–179. [Google Scholar] [CrossRef]
- Hall-Beyer, M. GLCM Texture: A Tutorial. NCGIA Remote Sens. Core Curric. 2000, 3, 75. [Google Scholar]
- Che, Y.; Wang, Q.; Zhou, L.; Wang, X.; Li, B.; Ma, Y. The Effect of Growth Stage and Plant Counting Accuracy of Maize Inbred Lines on LAI and Biomass Prediction. Precis. Agric. 2022, 23, 2159–2185. [Google Scholar] [CrossRef]
- Bai, X.; Liu, P.; Cao, Z.; Lu, H.; Xiong, H.; Yang, A.; Cai, Z.; Wang, J.; Yao, J. Rice Plant Counting, Locating, and Sizing Method Based on High-Throughput UAV RGB Images. Plant Phenomics 2023, 5, 0020. [Google Scholar] [CrossRef] [PubMed]
- Dodge, S.; Karam, L. Understanding How Image Quality Affects Deep Neural Networks. In Proceedings of the 2016 Eighth International Conference on Quality of Multimedia Experience (QoMEX), Lisbon, Portugal, 6–8 June 2016; IEEE: Lisbon, Portugal, 2016; pp. 1–6. [Google Scholar]
- Koziarski, M.; Cyganek, B. Impact of Low Resolution on Image Recognition with Deep Neural Networks: An Experimental Study. Int. J. Appl. Math. Comput. Sci. 2018, 28, 735–744. [Google Scholar] [CrossRef]
- Artemenko, N.V.; Genaev, M.A.; Epifanov, R.U.; Komyshev, E.G.; Kruchinina, Y.V.; Koval, V.S.; Goncharov, N.P.; Afonnikov, D.A. Image-Based Classification of Wheat Spikes by Glume Pubescence Using Convolutional Neural Networks. Front. Plant Sci. 2024, 14, 1336192. [Google Scholar] [CrossRef]
- Neupane, B.; Horanont, T.; Hung, N.D. Deep Learning Based Banana Plant Detection and Counting Using High-Resolution Red-Green-Blue (RGB) Images Collected from Unmanned Aerial Vehicle (UAV). PLoS ONE 2019, 14, e0223906. [Google Scholar] [CrossRef]
- De Castro, A.; Torres-Sánchez, J.; Peña, J.; Jiménez-Brenes, F.; Csillik, O.; López-Granados, F. An Automatic Random Forest-OBIA Algorithm for Early Weed Mapping between and within Crop Rows Using UAV Imagery. Remote Sens. 2018, 10, 285. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset Name | Crop | Location | Imaging Date | Inter-Row Distance, cm | Resolution GSD cm/px | Area, ha | Number of Plants |
|---|---|---|---|---|---|---|---|
| Beet_marat_0 | Sugar beet | MARAT | 2023.06.10 | 45 | 1.966 | 0.924 | 64,750 |
| Beet_marat_1 | Sugar beet | MARAT | 2023.06.10 | 45 | 1.966 | 0.924 | 74,394 |
| Krasnodar | Sugar beet | IVANOVSK | 2022.06.23 | 72 | 1.778 | 6.801 | 75,653 |
| Krasnodar_1 | Sunflower | NOVOMINSK | 2022.06.23 | 93 | 1.032 | 4.156 | 92,709 |
| Stavropol_1_7 | Sunflower | VINODEL | 2019.05.25 | 70 | 1.791 | 1.337 | 59,044 |
| Stavropol_2_7 | Potato | VINODEL | 2019.05.25 | 90 | 1.874 | 1.336 | 30,518 |
| Stavropol_4_1 | Potato | VINODEL | 2019.05.25 | 90 | 1.778 | 1.336 | 42,148 |
| Stavropol_4_3 | Potato | VINODEL | 2019.05.25 | 90 | 1.778 | 1.336 | 35,326 |
| Stavropol_4_9 | Potato | VINODEL | 2019.05.25 | 90 | 1.778 | 1.336 | 42,148 |
| Stavropol_2_0 | Potato | VINODEL | 2019.05.25 | 90 | 1.874 | 1.336 | 30,283 |
| Stavropol_2_2 | Potato | VINODEL | 2019.05.25 | 90 | 1.874 | 1.336 | 33,225 |
| Stavropol_4_0 | Potato | VINODEL | 2019.05.25 | 90 | 1.778 | 1.336 | 29,869 |
| Dataset Name | List of Images | Number of Plants | Number of Images |
|---|---|---|---|
| HQ1 | Beet_marat_0, Stavropol_4_1, UBONN_Sb1_2015, Krasnodar, Stavropol_1_7, Stavropol_2_0 | 281,325 | 1102 |
| HQ2 | Stavropol_4_3, UBONN_Sb2_2015, Krasnodar_1, Stavropol_2_2 | 170,629 | 721 |
| HQ3 | Beet_marat_1, Stavropol_2_7, Stavropol_4_9, UBONN_Sb3_2015, Stavropol_4_0 | 186,173 | 459 |
| LQ | BW_C_2021, DSC_SbCSf_2023, FYXDDS_C_2023, HZH_C, NWE_C_2022, NWE_Sb1_2022, NWE_Sb2_2022, NWE_Sf_2022, SEV_Sb_2022, UFMS_C_2023, URLTBK_P_2024, USM_T_2023, VW_C_2022, VW_Sf_2022 | 334,170 | 7453 |
| Experiment | Training Sample | Validation Sample | Test Sample | Encoder Architecture |
|---|---|---|---|---|
| RN18-HQ | HQ1 | HQ2 | HQ3 | ResNet-18 |
| RN18-LQ | LQ | HQ2 | HQ3 | ResNet-18 |
| RN18-HQ-LQ | HQ1+LQ | HQ2 | HQ3 | ResNet-18 |
| RN34-HQ-LQ | HQ1+LQ | HQ2 | HQ3 | ResNet-34 |
| RN50-HQ-LQ | HQ1+LQ | HQ2 | HQ3 | ResNet-50 |
| Experiment | Epoch Number for the Best Model | MAE | MAPE, % | r | rs | IoU |
|---|---|---|---|---|---|---|
| RN18-HQ | 79 | 96 | 6.22 | 0.9816 | 0.9363 | 0.3753 |
| RN18-LQ | 50 | 127 | 7.90 | 0.9850 | 0.9597 | 0.3166 |
| RN18-HQ-LQ | 79 | 105 | 5.57 | 0.9883 | 0.9600 | 0.3693 |
| RN34-HQ-LQ | 76 | 95 | 5.84 | 0.9878 | 0.9489 | 0.3600 |
| RN50-HQ-LQ | 83 | 78 | 5.20 | 0.9885 | 0.9571 | 0.3688 |
| Orthomosaic Image | MAE | MAPE, % | R | rs |
|---|---|---|---|---|
| Beet_marat_1 | 66 | 1.27 | 0.9734 | 0.9464 |
| Stavropol_2_7 | 18 | 2.30 | 0.9995 | 0.9870 |
| Stavropol_4_9 | 223 | 12.75 | 0.9880 | 0.8790 |
| UBONN_Sb3_2015 | 4 | 3.19 | 0.9987 | 0.9950 |
| Stavropol_4_0 | 79 | 6.51 | 0.9828 | 0.9781 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kozhekin, M.V.; Genaev, M.A.; Komyshev, E.G.; Zavyalov, Z.A.; Afonnikov, D.A. Plant Detection in RGB Images from Unmanned Aerial Vehicles Using Segmentation by Deep Learning and an Impact of Model Accuracy on Downstream Analysis. J. Imaging 2025, 11, 28. https://doi.org/10.3390/jimaging11010028
Kozhekin MV, Genaev MA, Komyshev EG, Zavyalov ZA, Afonnikov DA. Plant Detection in RGB Images from Unmanned Aerial Vehicles Using Segmentation by Deep Learning and an Impact of Model Accuracy on Downstream Analysis. Journal of Imaging. 2025; 11(1):28. https://doi.org/10.3390/jimaging11010028
Chicago/Turabian StyleKozhekin, Mikhail V., Mikhail A. Genaev, Evgenii G. Komyshev, Zakhar A. Zavyalov, and Dmitry A. Afonnikov. 2025. "Plant Detection in RGB Images from Unmanned Aerial Vehicles Using Segmentation by Deep Learning and an Impact of Model Accuracy on Downstream Analysis" Journal of Imaging 11, no. 1: 28. https://doi.org/10.3390/jimaging11010028
APA StyleKozhekin, M. V., Genaev, M. A., Komyshev, E. G., Zavyalov, Z. A., & Afonnikov, D. A. (2025). Plant Detection in RGB Images from Unmanned Aerial Vehicles Using Segmentation by Deep Learning and an Impact of Model Accuracy on Downstream Analysis. Journal of Imaging, 11(1), 28. https://doi.org/10.3390/jimaging11010028