



Precision Agriculture: Computer Vision-Enabled Sugarcane Plant Counting in the Tillering Phase


Abstract
1. Introduction
- AI facilitates precision farming, which optimizes resource utilization in sugarcane production.
- Predictive analytics aids in disease identification and yield prediction, which improves crop management.
- Automation using AI-powered robotics accelerates harvesting procedures, lowering human expenses.
- Sugar cane delivery is more efficient and timelier when the supply chain is optimized.
- AI increases agricultural breeding, resulting in superior sugar cane types.
2. Related Work
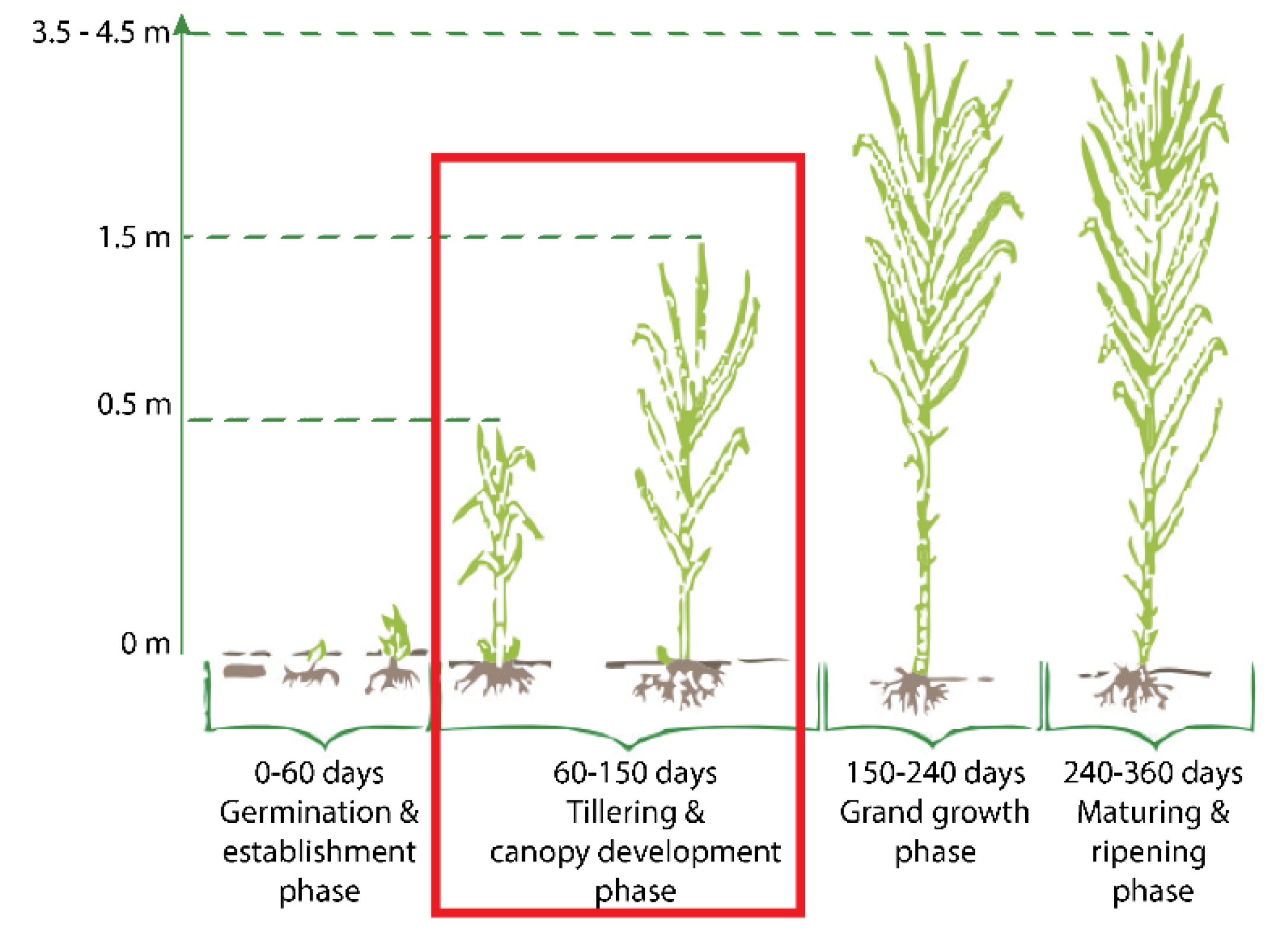
3. Methodology
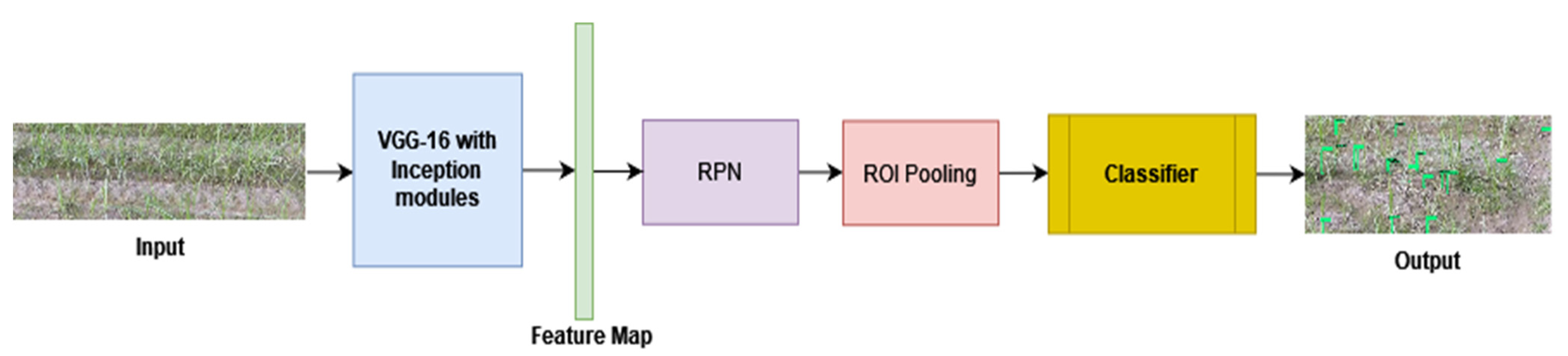
3.1. Proposed Solution
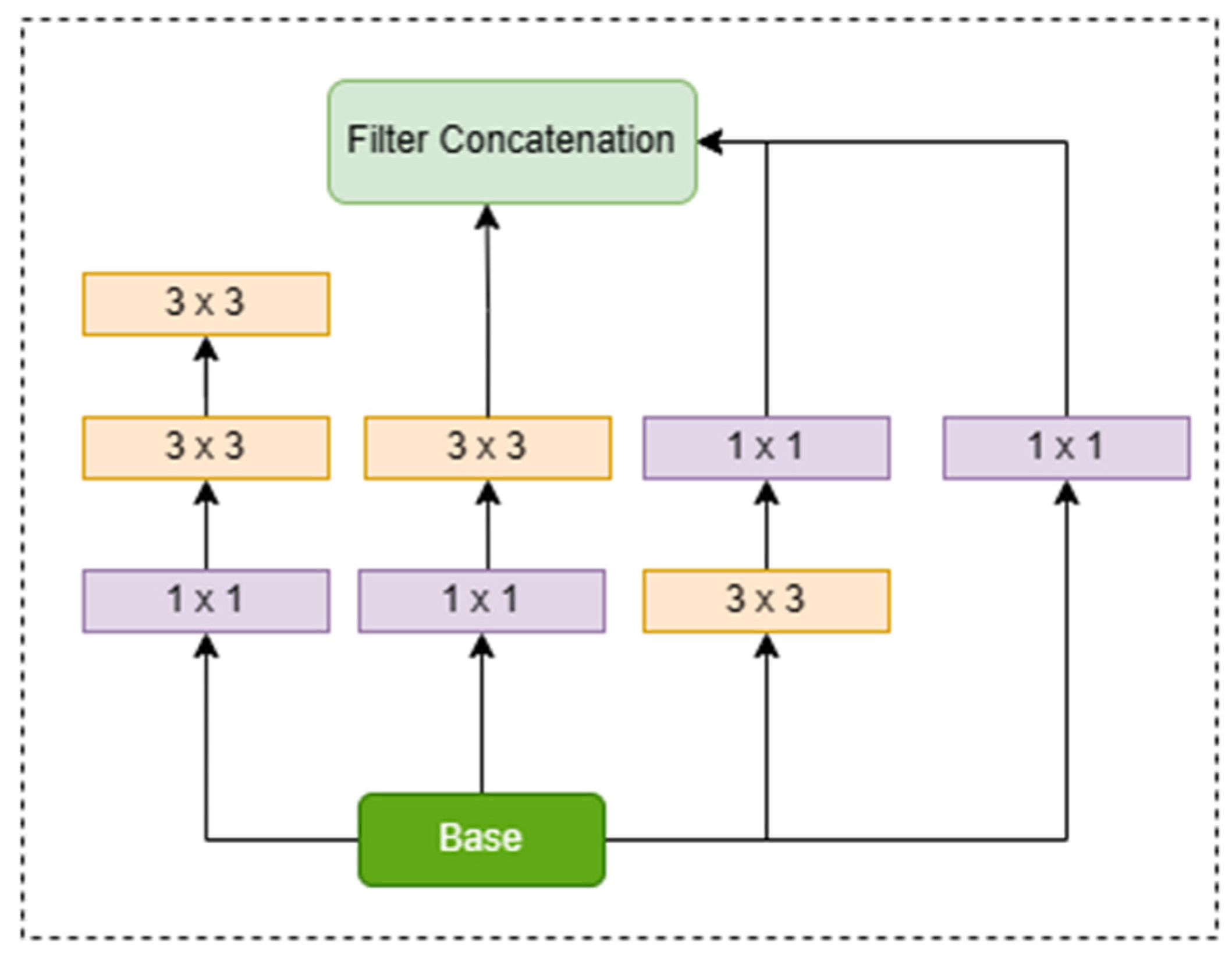
3.2. Base Network
4. Experiments and Results
4.1. Materials and Methods
4.2. Data Preparation
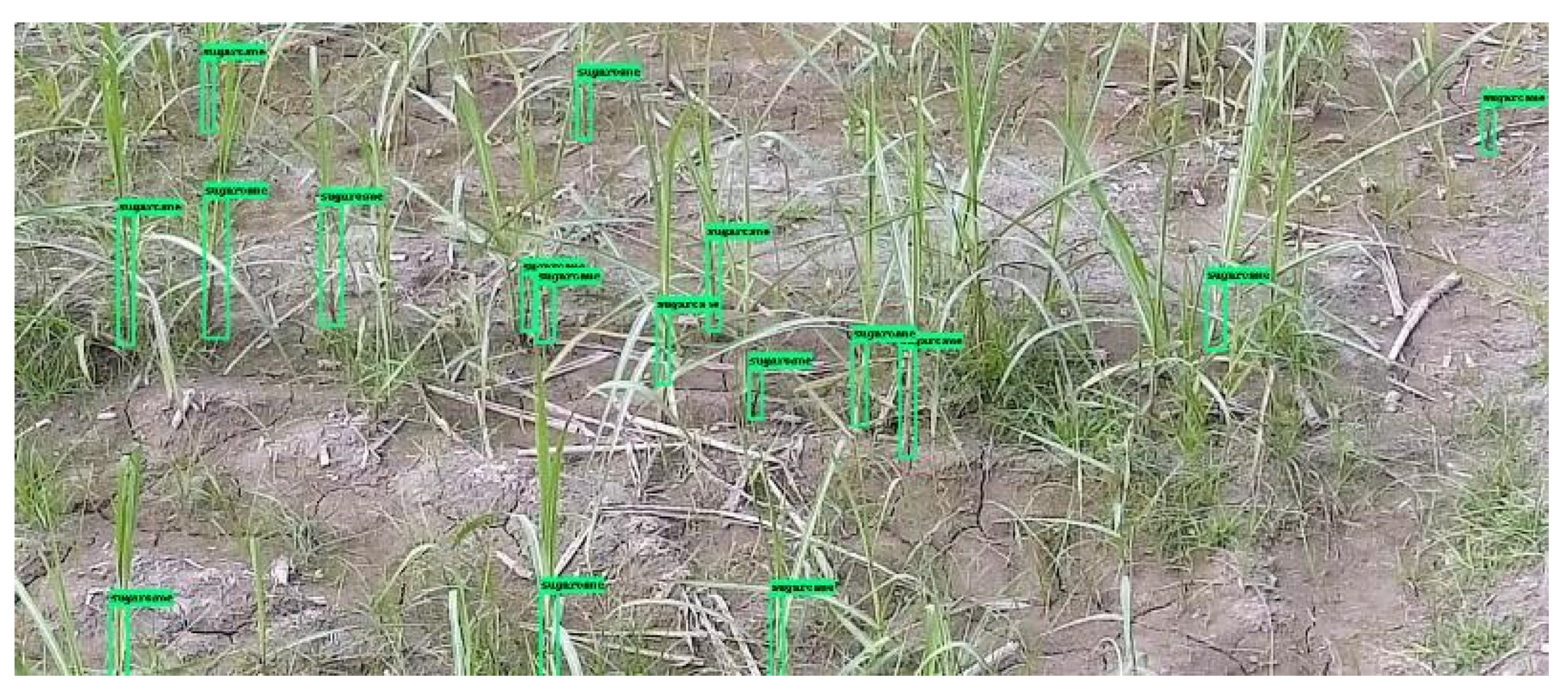
4.3. Results and Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mawandha, H.G.; Sudigyo, D.; Suparyanto, T.; Pardamean, B. Application for sugarcane plantation: Manpower and transportation planning. In AIP Conference Proceedings; AIP Publishing: College Park, MD, USA, 2023; Volume 2594. [Google Scholar]
- Eli-Chukwu, N.C. Applications of Artificial Intelligence in Agriculture: A Review. Eng. Technol. Appl. Sci. Res. 2019, 9, 4377–4383. [Google Scholar] [CrossRef]
- Molijn, R.A.; Iannini, L.; Vieira Rocha, J.; Hanssen, R.F. Sugarcane Productivity Mapping through C-Band and L-Band SAR and Optical Satellite Imagery. Remote Sens. 2019, 11, 1109. [Google Scholar] [CrossRef]
- Zualkernan, I.; Abuhani, D.A.; Hussain, M.H.; Khan, J.; ElMohandes, M. Machine Learning for Precision Agriculture Using Imagery from Unmanned Aerial Vehicles (UAVs): A Survey. Drones 2023, 7, 382. [Google Scholar] [CrossRef]
- Beard and Hair Detection, Segmentation and Changing Color Using Mask R-CNN|SpringerLink. Available online: https://link.springer.com/chapter/10.1007/978-981-16-7618-5_6 (accessed on 21 January 2024).
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv, 2018; arXiv:180402767. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. In Proceedings of the Advances in Neural Information Processing Systems 28 (NIPS 2015), Montreal, QC, Canada, 7–12 December 2015; Volume 28, pp. 91–99. [Google Scholar]
- Chattopadhyay, P.; Vedantam, R.; Selvaraju, R.R.; Batra, D.; Parikh, D. Counting everyday objects in everyday scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1135–1144. [Google Scholar]
- Javaid, S.; Rizvi, S. A Novel Action Transformer Network for Hybrid Multimodal Sign Language Recognition. Comput. Mater. Contin. 2023, 74, 523–537. [Google Scholar] [CrossRef]
- Zhang, J.; Li, C.; Rahaman, M.M.; Yao, Y.; Ma, P.; Zhang, J.; Zhao, X.; Jiang, T. A comprehensive review of image analysis methods for microorganism counting: From classical image processing to deep learning approaches. Artif. Intell. Rev. 2022, 55, 2875–2944. [Google Scholar] [CrossRef] [PubMed]
- Ubaid, T.; Darboe, A.; Uche, F. Kett Mangoes Detection in the Gambia using Deep Learning Techniques. In Proceedings of the International Conference on Innovative Computing (ICIC), Lahore, Pakistan, 9–10 November 2022. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, W.; Yu, J.; He, L.; Chen, J.; He, Y. Complete and accurate holly fruits counting using YOLOX object detection. Comput. Electron. Agric. 2022, 198, 107062. [Google Scholar] [CrossRef]
- Rudorff, B.F.T.; Batista, G. Yield estimation of sugarcane based on agrometeorological-spectral models. Remote Sens. Environ. 1990, 33, 183–192. [Google Scholar] [CrossRef]
- Ribera, J.; Chen, Y.; Boomsma, C.; Delp, E.J. Counting plants using deep learning. In Proceedings of the 2017 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Montreal, QC, Canada, 14–16 November 2017; IEEE: Piscataway Township, NJ, USA, 2017; pp. 1344–1348. [Google Scholar]
- Pidhirniak, O. Automatic Plant Counting Using Deep Neural Networks. Masters’ Thesis, Ukrainian catholic University, Lviv, Ukraine, 19 February 2019. [Google Scholar]
- Omari, M.K.; Lee, J.; Faqeerzada, M.A.; Joshi, R.; Park, E.; Cho, B.-K. Digital image-based plant phenotyping: A review. Korean J. Agric. Sci. 2020, 47, 119–130. [Google Scholar]
- Machefer, M.; Lemarchand, F.; Bonnefond, V.; Hitchins, A.; Sidiropoulos, P. Mask R-CNN Refitting Strategy for Plant Counting and Sizing in UAV Imagery. Remote Sens. 2020, 12, 3015. [Google Scholar] [CrossRef]
- de Souza, C.H.W.; Lamparelli, R.A.C.; Rocha, J.V.; Magalhães, P.S.G. Mapping skips in sugarcane fields using object-based analysis of unmanned aerial vehicle (UAV) images. Comput. Electron. Agric. 2017, 143, 49–56. [Google Scholar] [CrossRef]
- Baweja, H.S.; Parhar, T.; Mirbod, O.; Nuske, S. Stalknet: A deep learning pipeline for high-throughput measurement of plant stalk count and stalk width. In Proceedings of the Field and Service Robotics: Results of the 11th International Conference, Zurich, Switzerland, 12−15 September 2017; Springer: Berlin/Heidelberg, Germany, 2018; pp. 271–284. [Google Scholar]
- Kitano, B.T.; Mendes, C.C.; Geus, A.R.; Oliveira, H.C.; Souza, J.R. Corn plant counting using deep learning and UAV images. IEEE Geosci. Remote Sens. Lett. 2019, 99, 1–5. [Google Scholar] [CrossRef]
- Cenggoro, T.W.; Budiarto, A.; Rahutomo, R.; Pardamean, B. Information system design for deep learning based plant counting automation. In Proceedings of the 2018 Indonesian Association for Pattern Recognition International Conference (INAPR), Jakarta, Indonesia, 7–8 September 2018; IEEE: Piscataway Township, NJ, USA, 2018; pp. 329–332. [Google Scholar]
- Pan, Y.; Zhu, N.; Ding, L.; Li, X.; Goh, H.-H.; Han, C.; Zhang, M. Identification and Counting of Sugarcane Seedlings in the Field Using Improved Faster R-CNN. Remote Sens. 2022, 14, 5846. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27 June–1 July 2016; pp. 2818–2826. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:14091556. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Talha, U.; Sameena, J. Sugarcane Plant in Tillering Phase. Mendeley Data. V1. 2024. Available online: https://data.mendeley.com/datasets/m5zxyznvgz/1 (accessed on 28 March 2024).
- Talha, U.; Sameena, J. Annotated Sugarcane Plants. Mendeley Data. V1. 2024. Available online: https://data.mendeley.com/datasets/ydr8vgg64w/1 (accessed on 28 March 2028).
- Imgaug. Available online: https://imgaug.readthedocs.io/en/latest/ (accessed on 24 March 2024).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
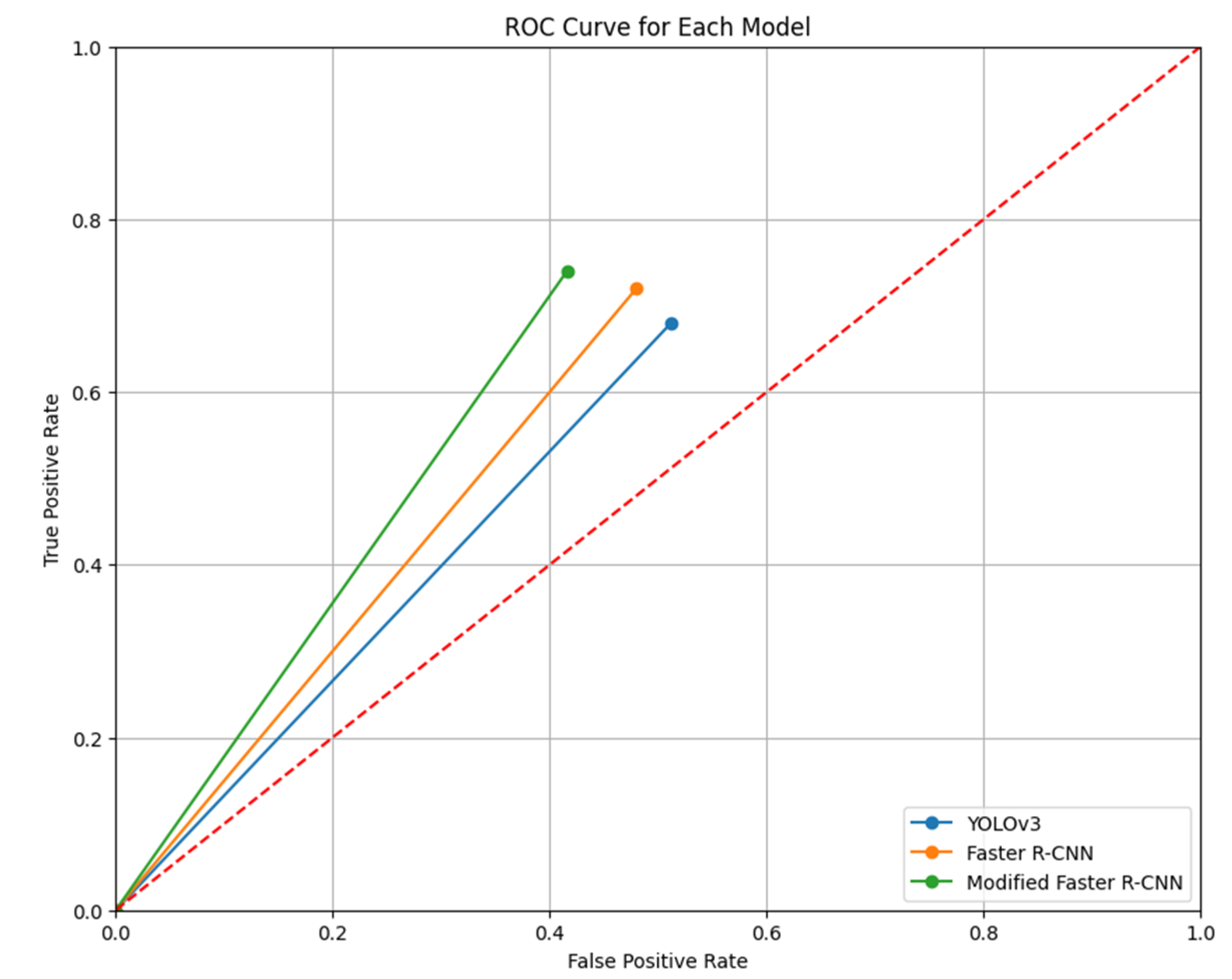
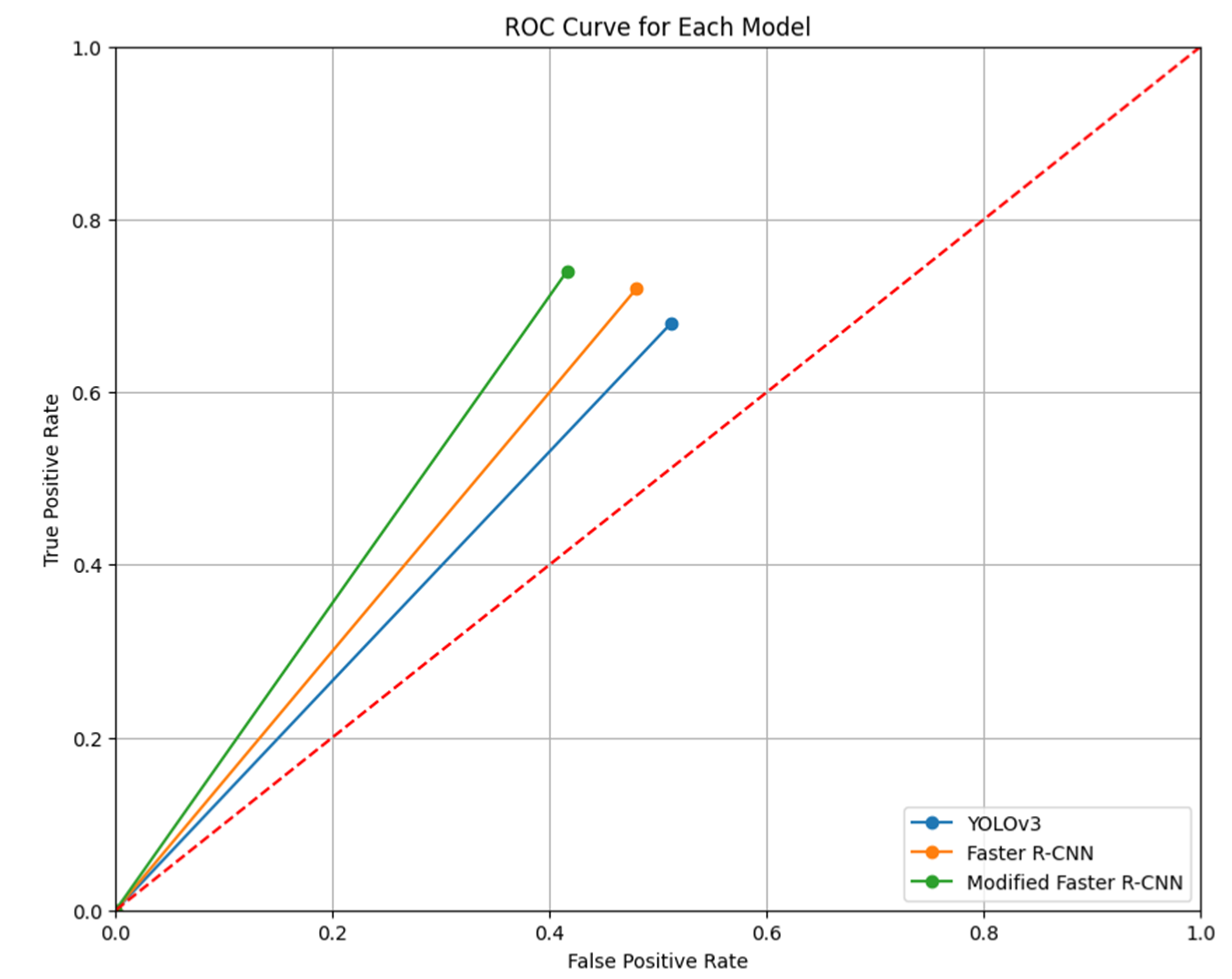
| Methods | Dataset | Accuracy |
|---|---|---|
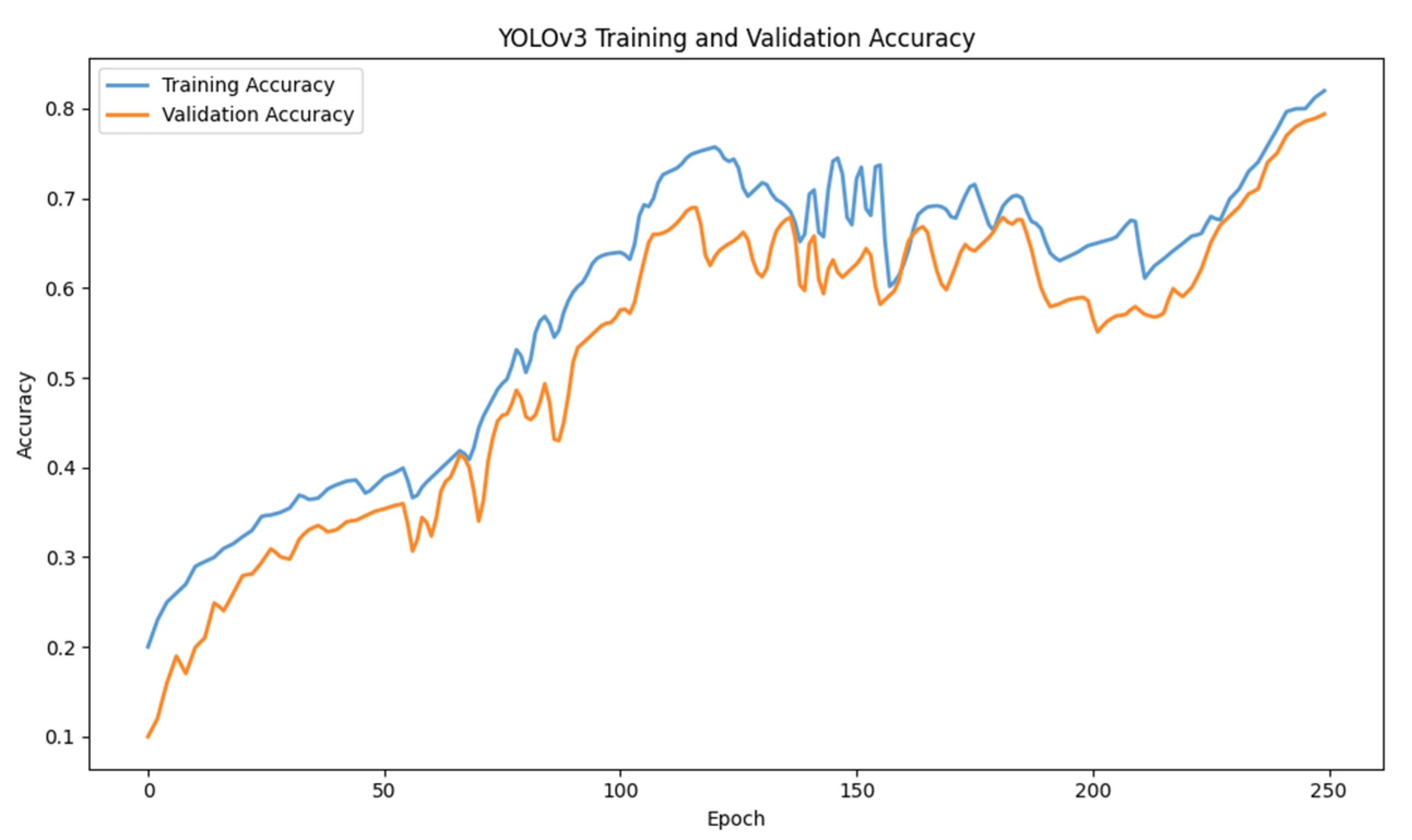
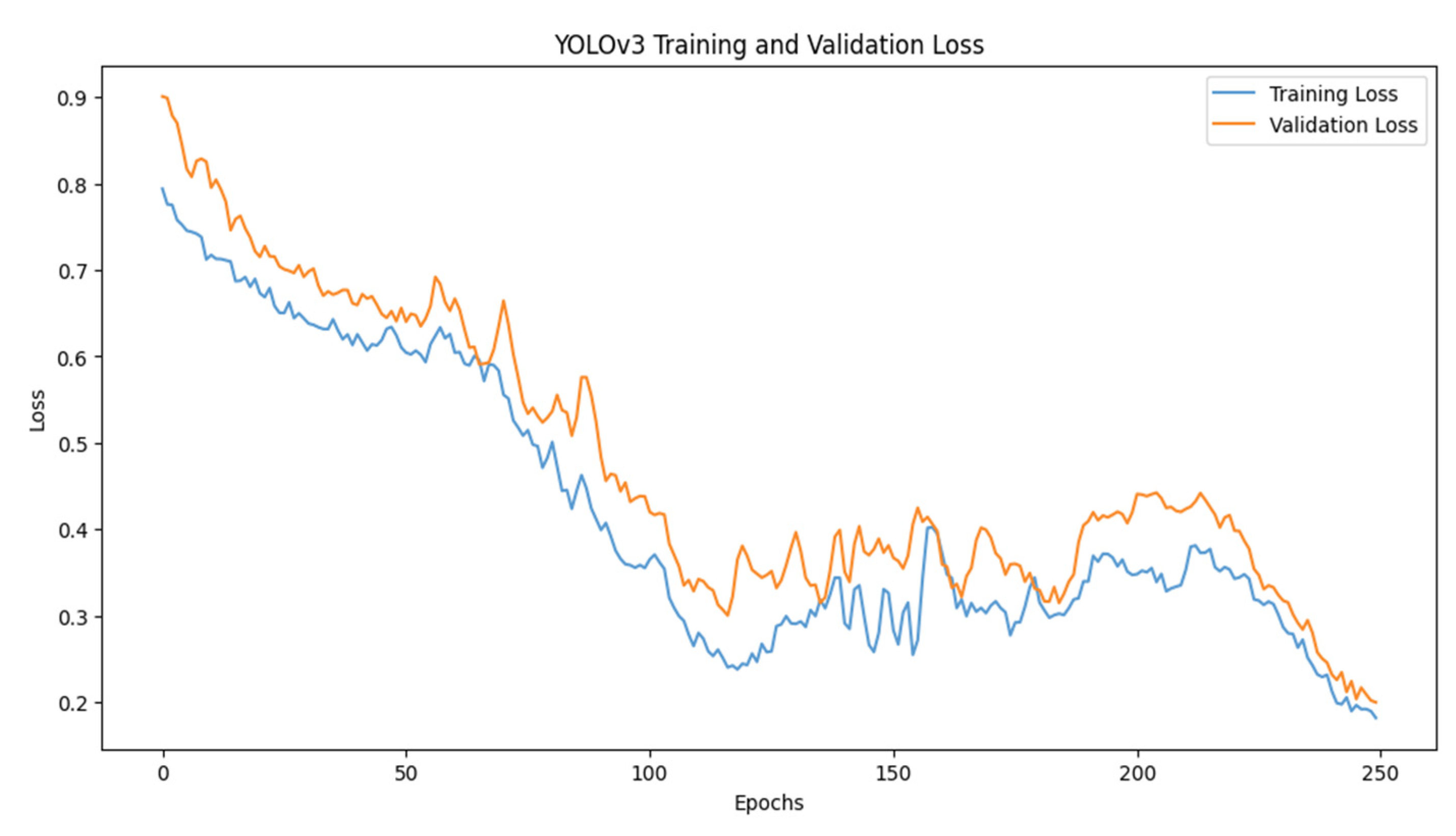
| YOLOv3 | Sugarcane dataset | 78.13% |
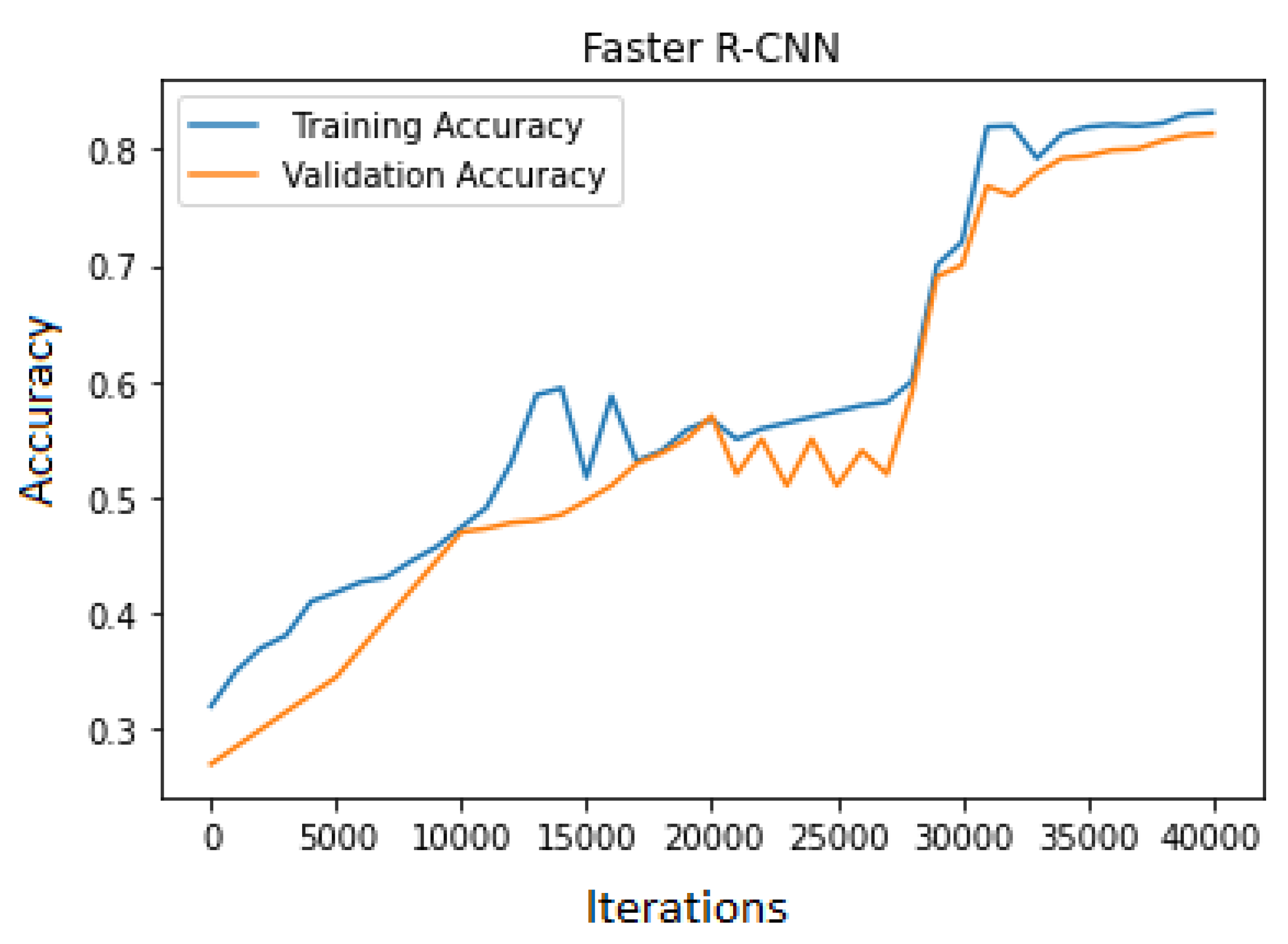
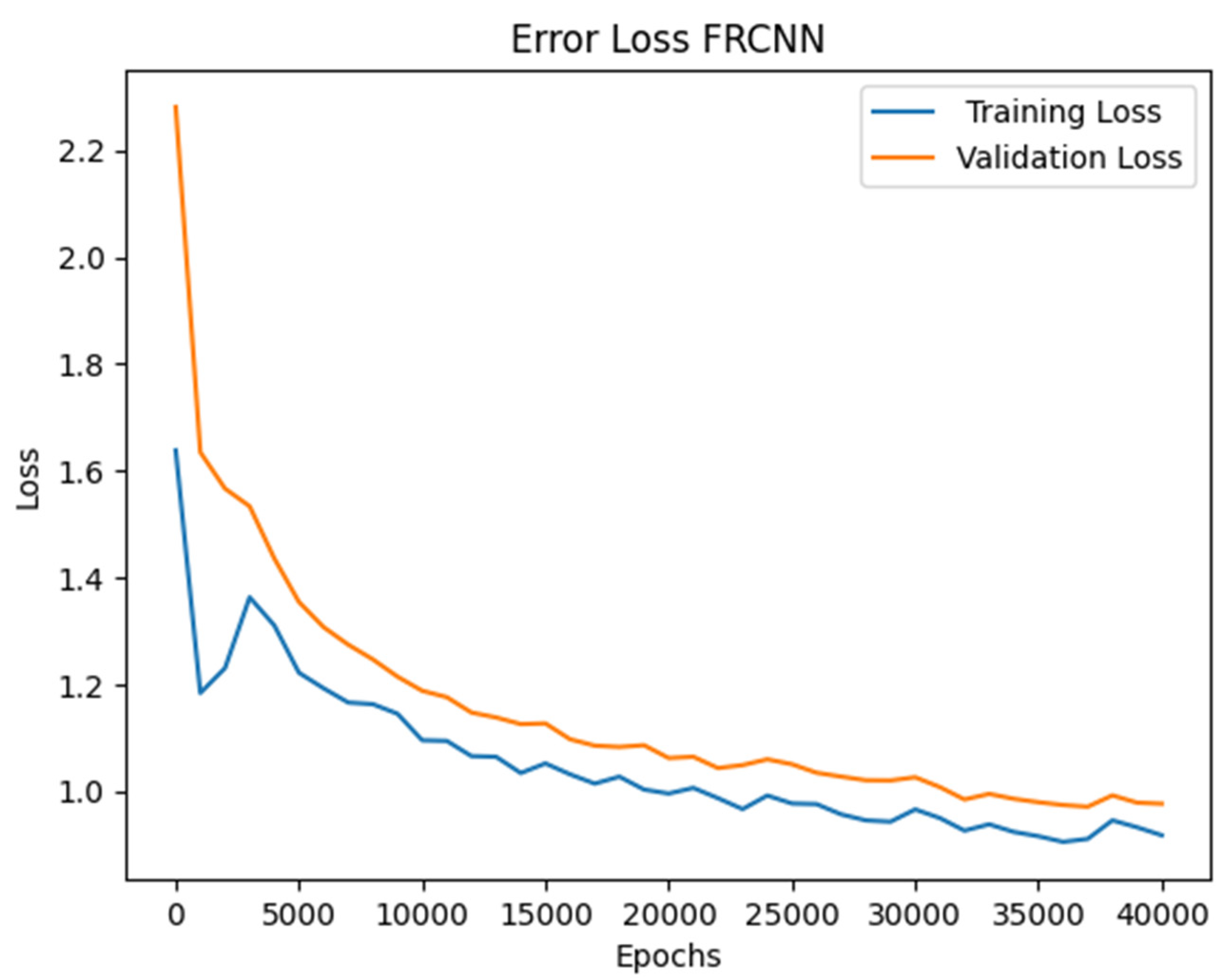
| Faster R-CNN | Sugarcane dataset | 81.33% |
| Modified Faster R-CNN | Sugarcane dataset | 82.10% |
| Methods | Precision | Recall | F1-Score |
|---|---|---|---|
| YOLOv3 | 0.57 | 0.68 | 0.62 |
| Faster R-CNN | 0.60 | 0.72 | 0.65 |
| Modified Faster R-CNN | 0.64 | 0.74 | 0.68 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ubaid, M.T.; Javaid, S. Precision Agriculture: Computer Vision-Enabled Sugarcane Plant Counting in the Tillering Phase. J. Imaging 2024, 10, 102. https://doi.org/10.3390/jimaging10050102
Ubaid MT, Javaid S. Precision Agriculture: Computer Vision-Enabled Sugarcane Plant Counting in the Tillering Phase. Journal of Imaging. 2024; 10(5):102. https://doi.org/10.3390/jimaging10050102
Chicago/Turabian StyleUbaid, Muhammad Talha, and Sameena Javaid. 2024. "Precision Agriculture: Computer Vision-Enabled Sugarcane Plant Counting in the Tillering Phase" Journal of Imaging 10, no. 5: 102. https://doi.org/10.3390/jimaging10050102
APA StyleUbaid, M. T., & Javaid, S. (2024). Precision Agriculture: Computer Vision-Enabled Sugarcane Plant Counting in the Tillering Phase. Journal of Imaging, 10(5), 102. https://doi.org/10.3390/jimaging10050102