
An Improved Bio-Orientation Method Based on Direct Sunlight Compensation for Imaging Polarization Sensor



Abstract
1. Introduction
- (1)
- On the basis of the analyzing the interference of direct sunlight in complex environmental conditions on polarization sensor detection, the direct sunlight interference factor is introduced into the imaging polarization detection intensity response model, thereby enhancing the model’s accuracy.
- (2)
- A polarization-state information analytical solution model is constructed by utilizing the redundant information of the four-channel polarization response intensity to formulate equations, which improves the accuracy and real-time performance of polarization state information resolution.
- (3)
- A polarization heading measurement method based on direct sunlight compensation is proposed. And the simulation and outdoor dynamic reorientation experiment platform is established to verify the advancement of the proposed method.
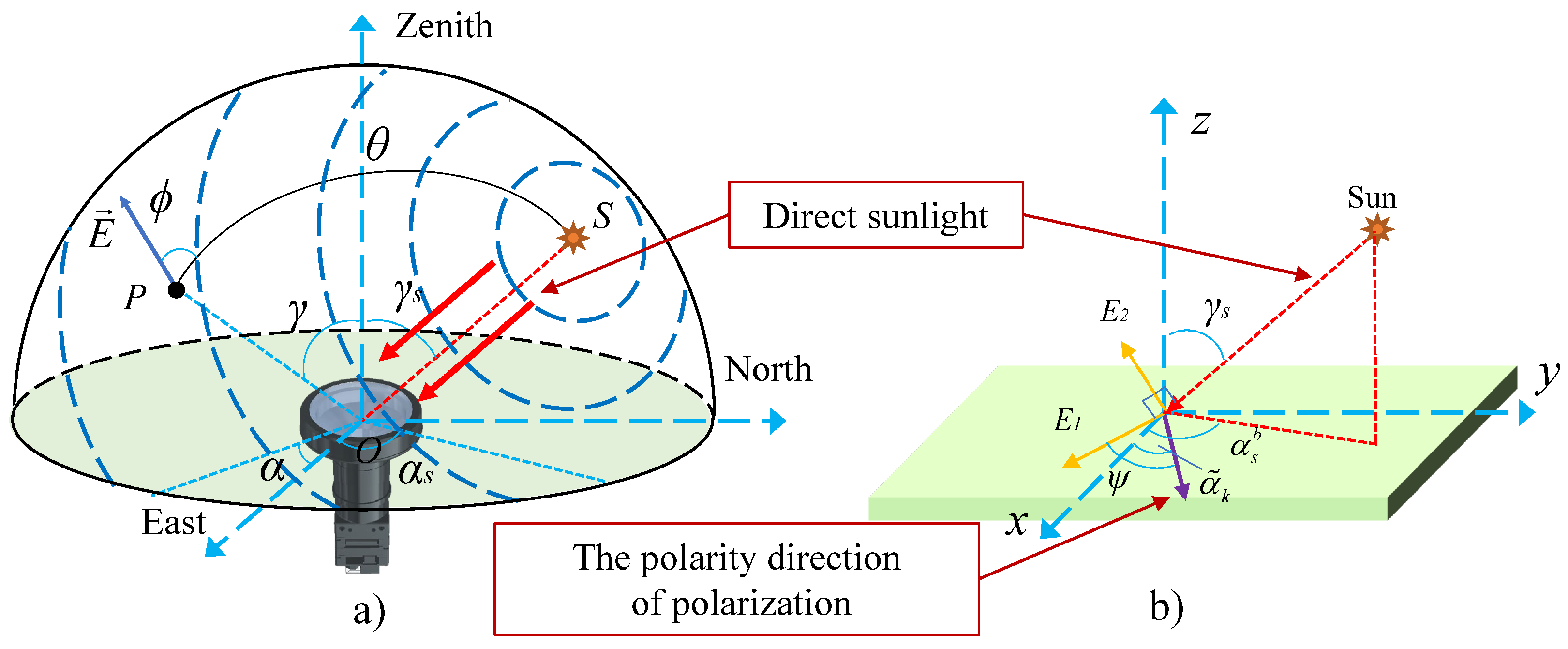
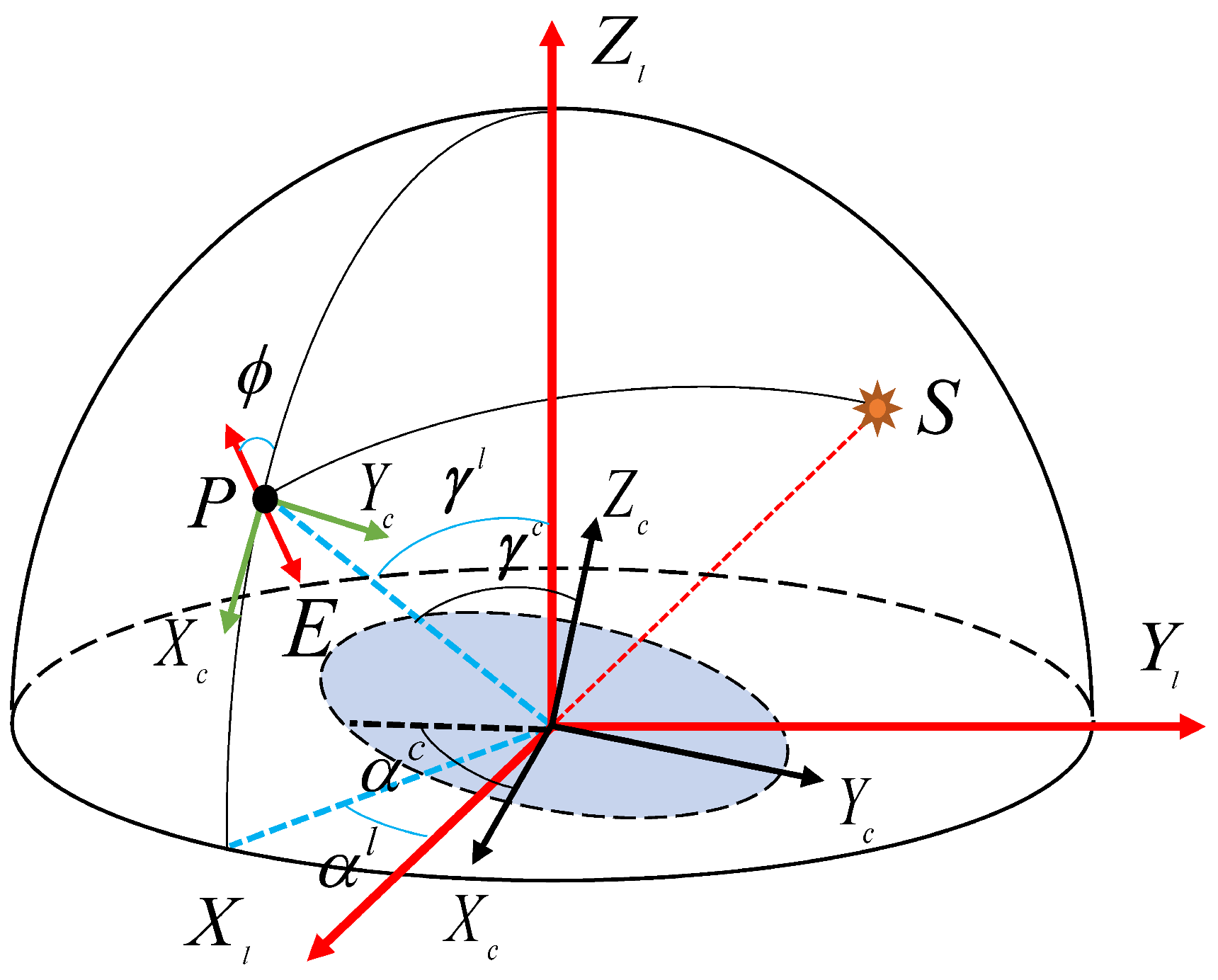
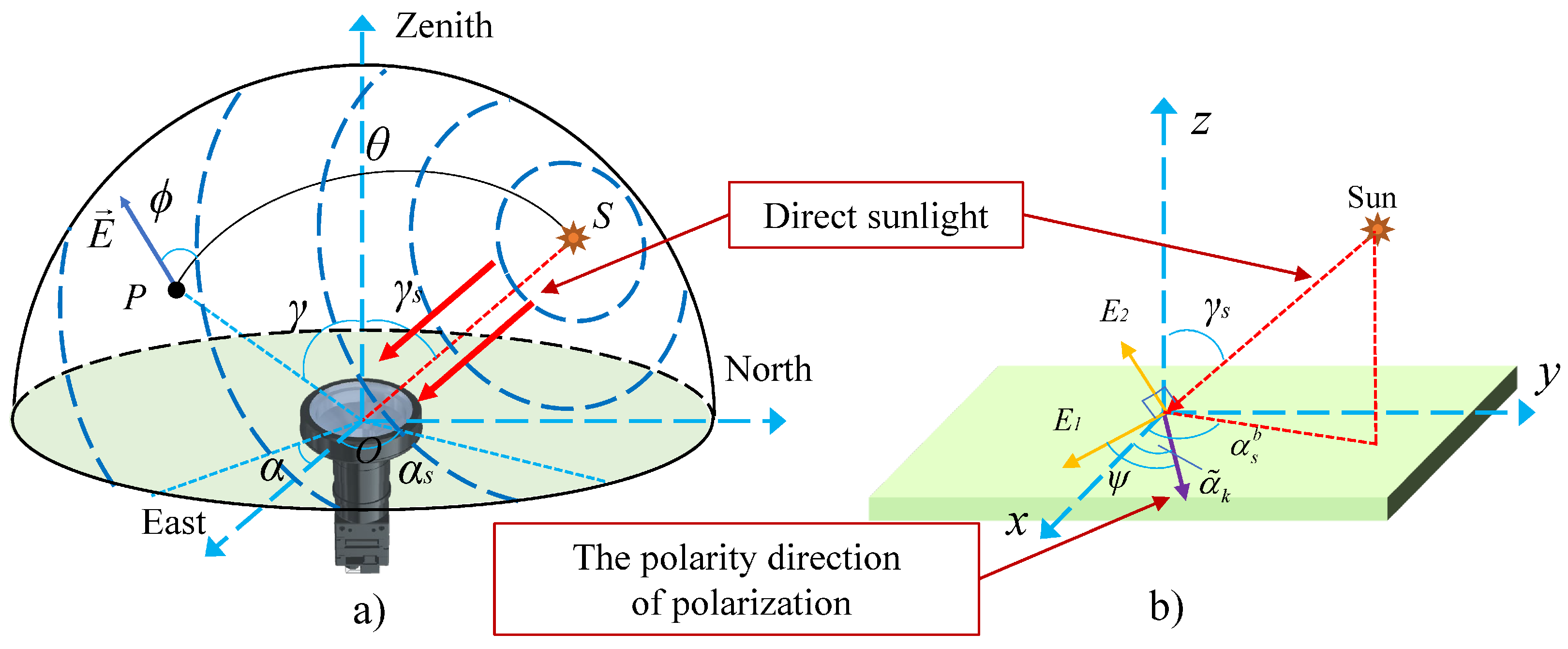
2. Problem Description
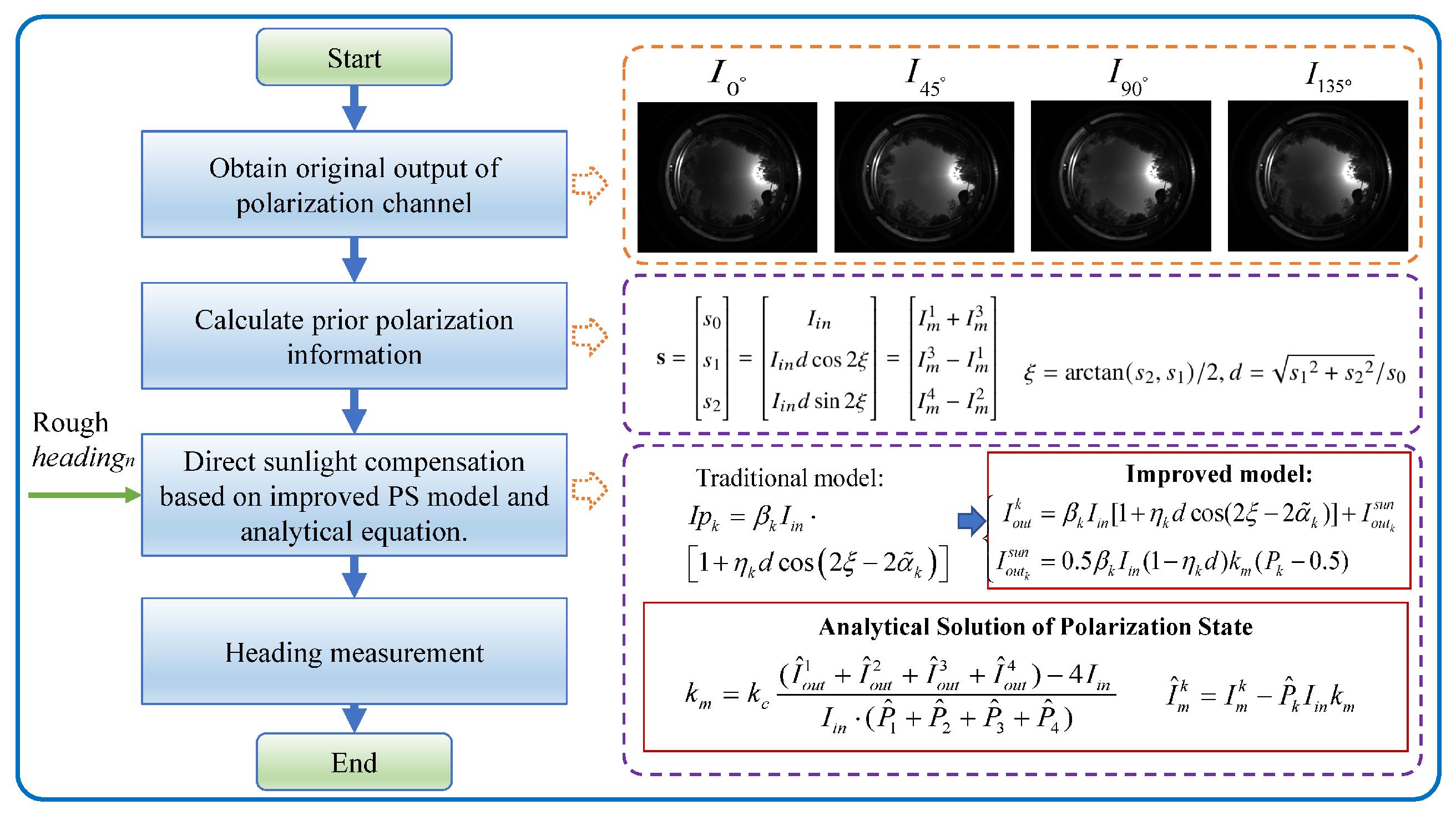
3. Method
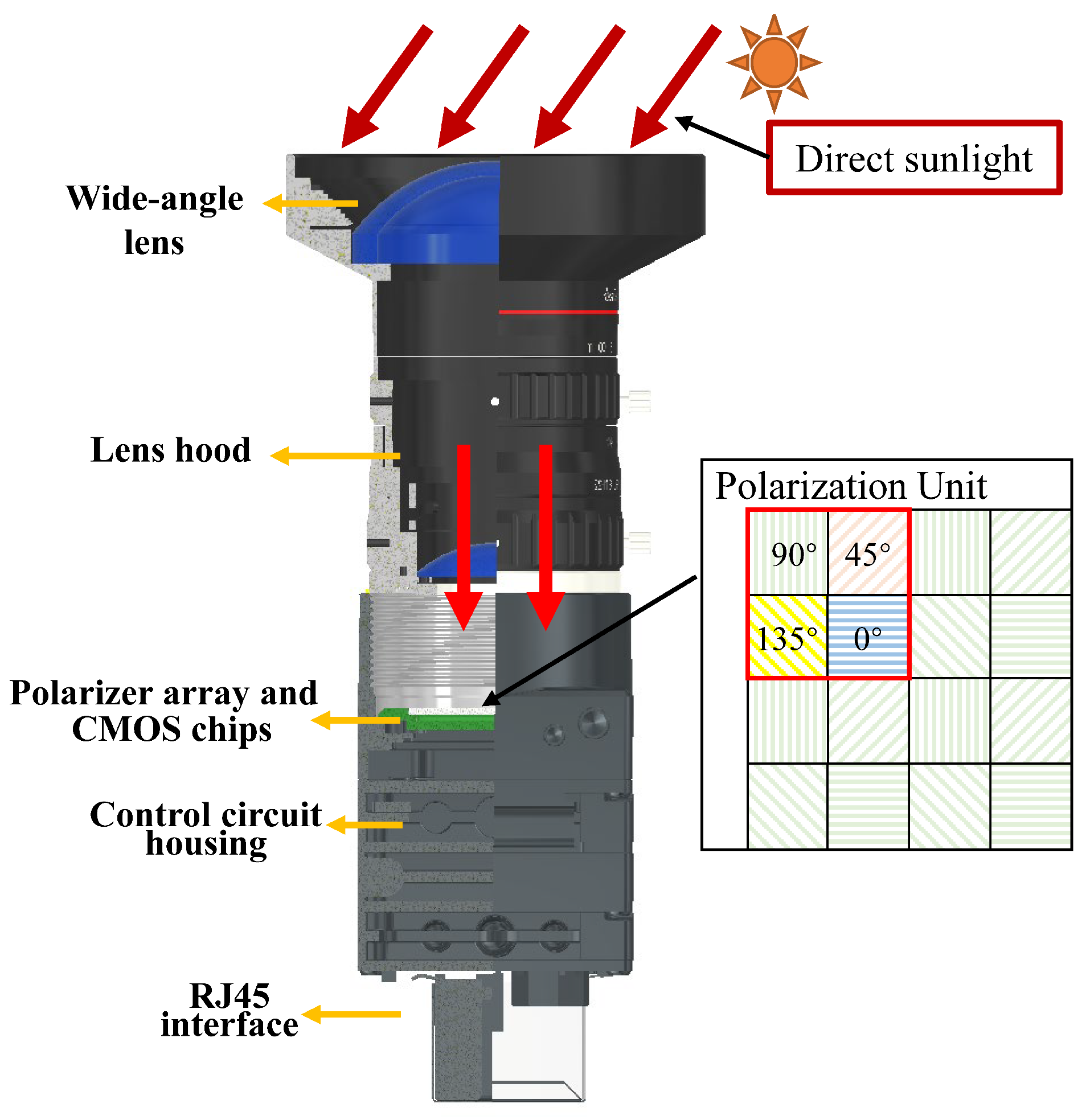
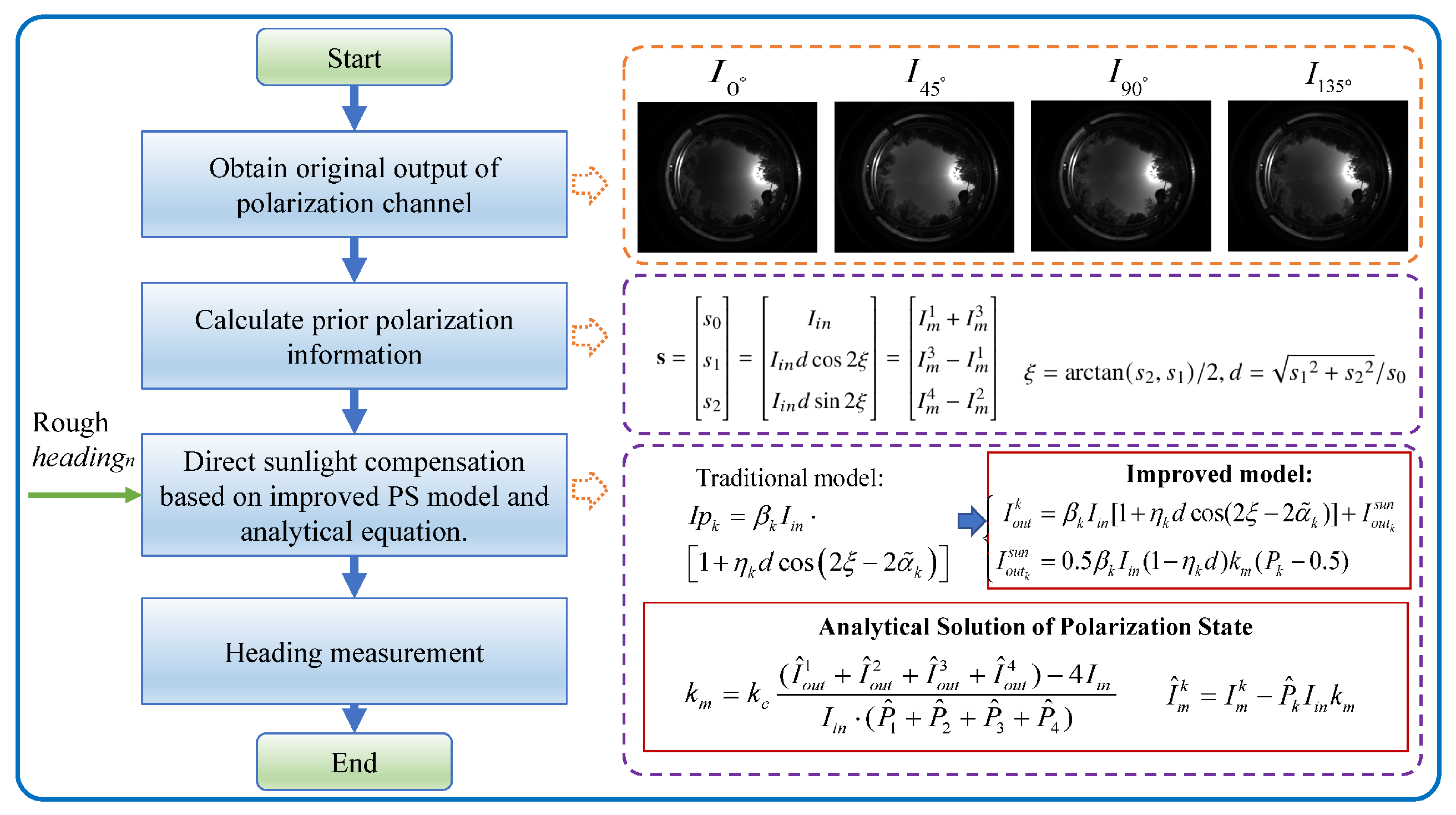
3.1. Improved Imaging PS Model with Direct Sunlight Compensation
3.2. Analytical Solution of Polarization State Based on Improved Imaging PS Model
3.3. Heading Measurement
| Algorithm 1 Polarization orientation method based on direct sunlight compensation. | |
| Data: Measured polarization intensity , carrier attitude and , and | |
| Result: Polarized heading after direct sunlight compensation | |
| 1: Initialize the prior value ,; | |
| 2: ,; | |
| 3: Calculate the direct sunlight weights from Equation (22); | |
| 4: , and calculate and from Equations (23) and (24); | |
| 5: ; | |
| 6: ; | |
| 7: Obtain the polarization orientation from Equations (31) and (32); | |
| 8: return | |
4. Experimental Result and Discussion
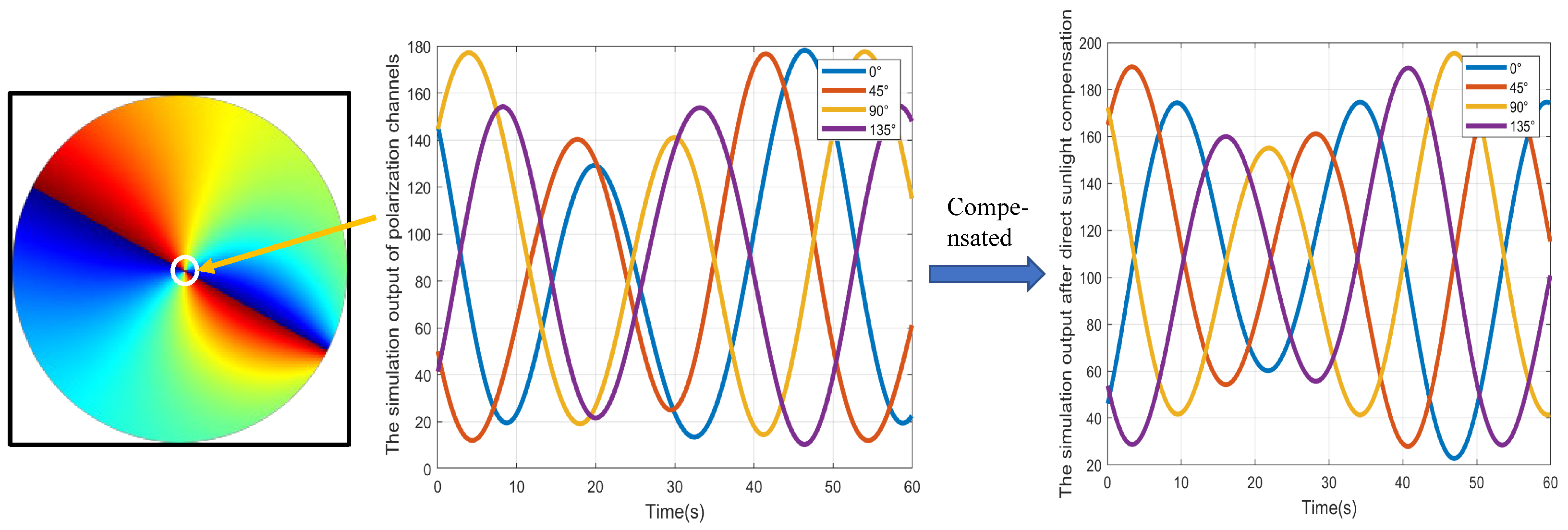
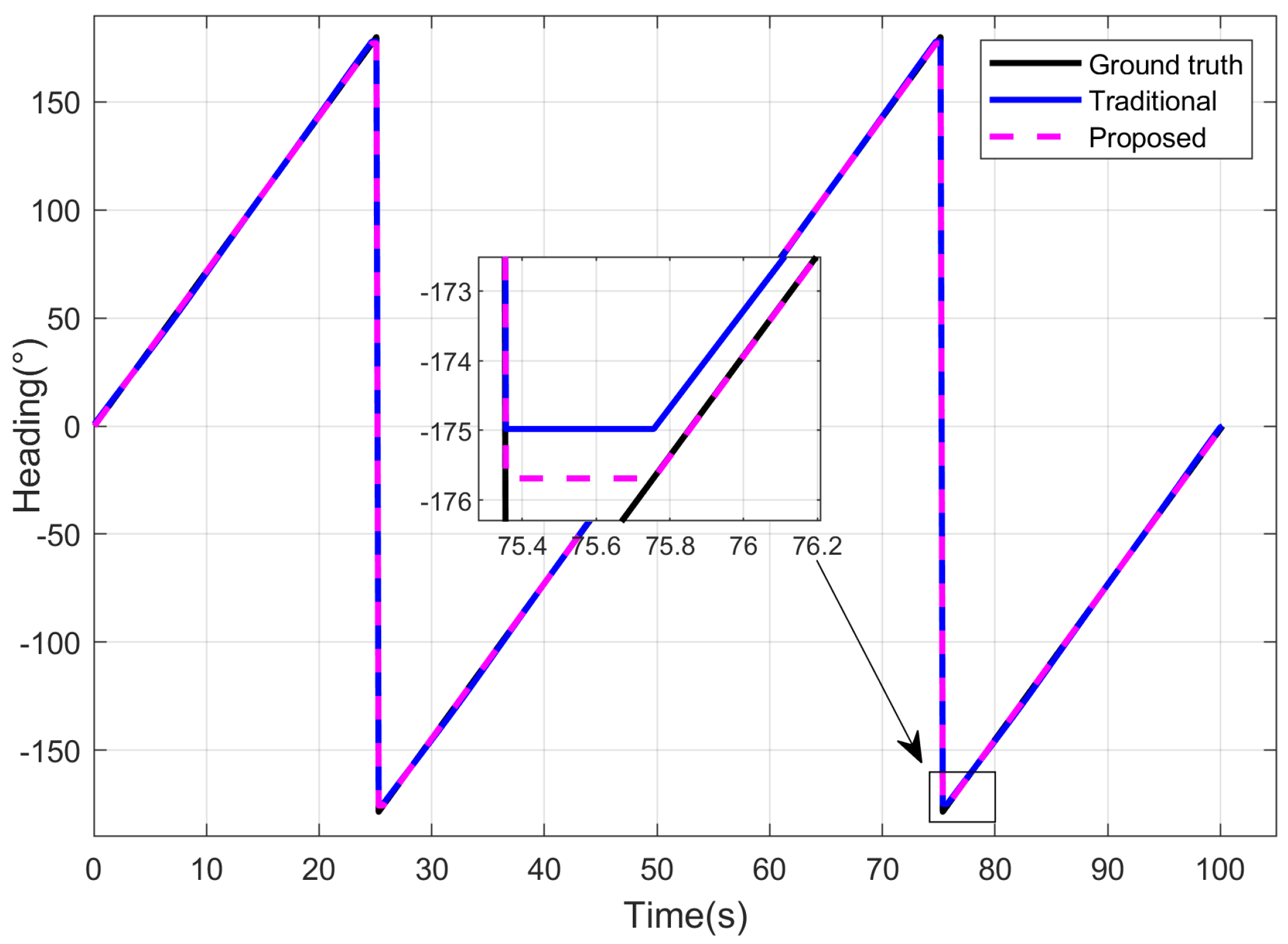
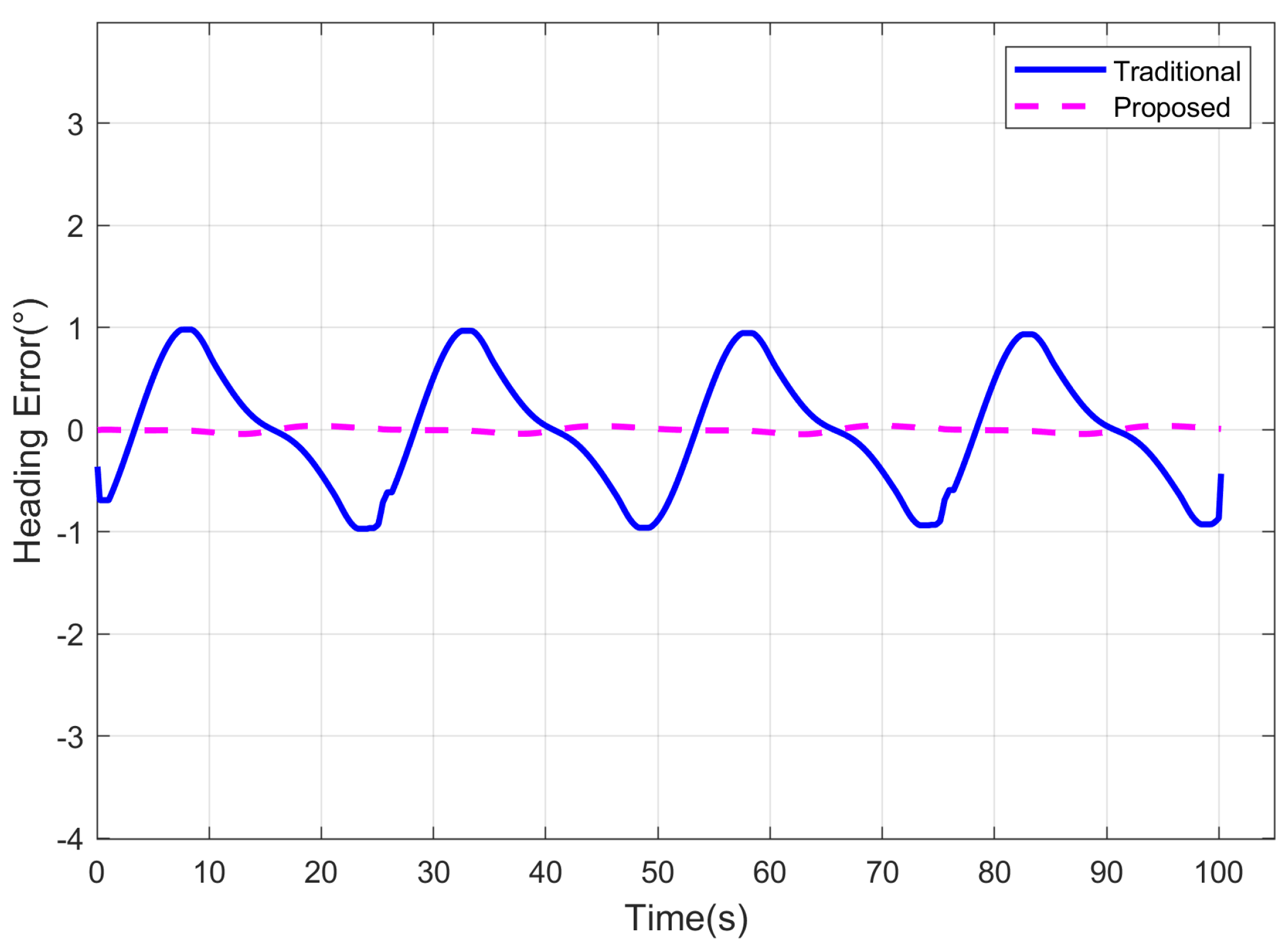
4.1. Simulation
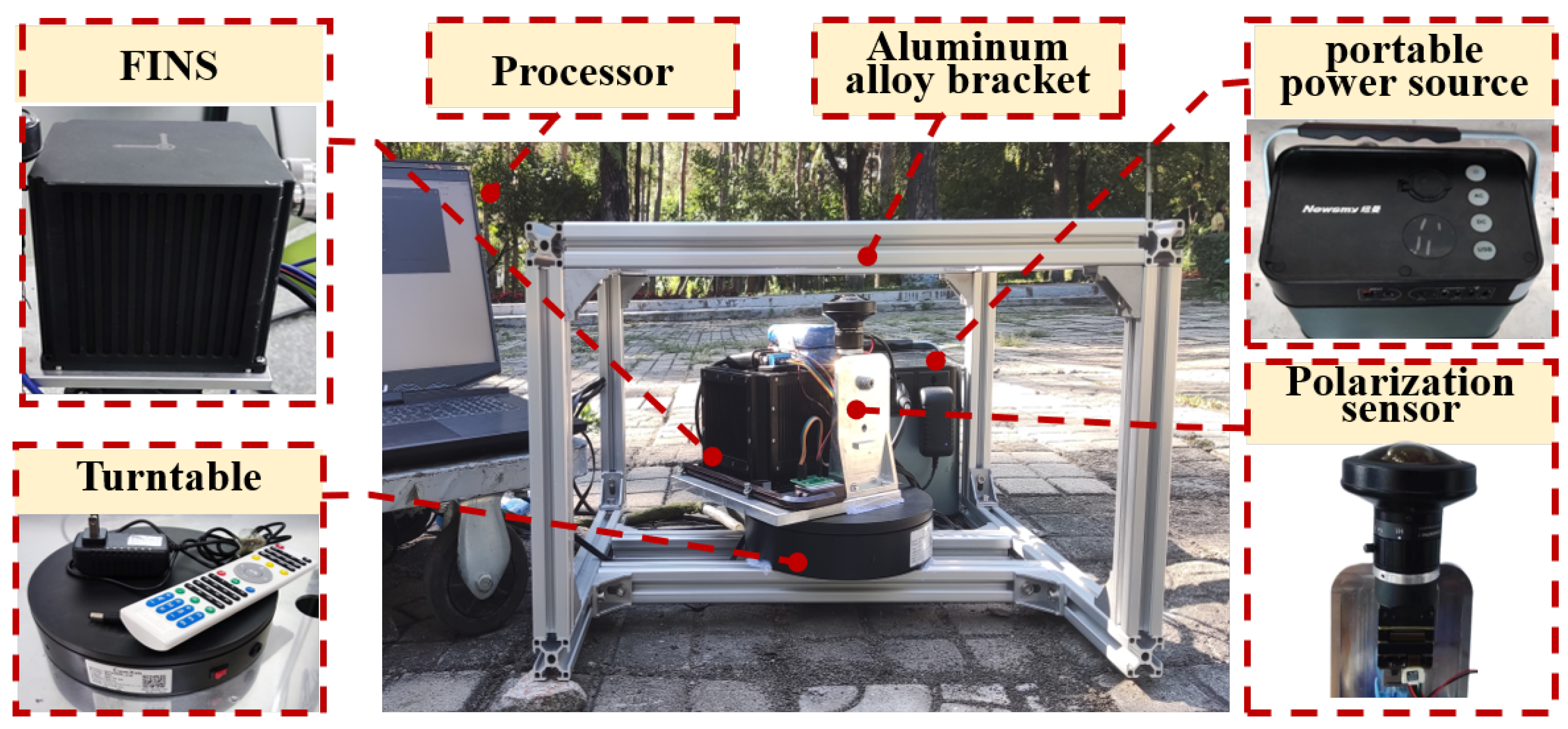
4.2. Outdoor Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pan, J.; Wu, Y.; Zhang, X.; Chen, J.; Wang, J.; Cheng, S.; Wu, X.; Zhang, X.; Jie, J. Anisotropic charge trapping in phototransistors unlocks ultrasensitive polarimetry for bionic navigation. Nat. Commun. 2022, 13, 6629. [Google Scholar] [CrossRef]
- Machado, R.; Bendesky, J.; Brown, M.; Spendier, K.; Hagen, G.M. Imaging Membrane Curvature inside a FcεRI-Centric Synapse in RBL-2H3 Cells Using TIRF Microscopy with Polarized Excitation. J. Imaging 2019, 5, 63. [Google Scholar] [CrossRef]
- Nguyen, T.X.B.; Rosser, K.; Chahl, J. A Review of Modern Thermal Imaging Sensor Technology and Applications for Autonomous Aerial Navigation. J. Imaging 2021, 7, 217. [Google Scholar] [CrossRef]
- Powell, S.B.; Garnett, R.; Marshall, J.; Rizk, C.; Gruev, V. Bioinspired polarization vision enables underwater geolocalization. Sci. Adv. 2018, 4, 8. [Google Scholar] [CrossRef]
- Cheng, H.Y.; Zhang, Q.L.; Wan, Z.H.; Zhang, Z.Y.; Qin, J. Study on the Polarization Pattern Induced by Wavy Water Surfaces. Remote Sens. 2023, 15, 4565. [Google Scholar] [CrossRef]
- Luo, J.S.; Zhou, S.; Li, Y.M.; Pang, Y.; Wang, Z.W.; Lu, Y.; Wang, H.Q.; Bai, T. Polarization Orientation Method Based on Remote Sensing Image in Cloudy Weather. Remote Sens. 2023, 15, 1225. [Google Scholar] [CrossRef]
- Patel, R.N.; Khil, V.; Abdurahmonova, L.; Driscoll, H.; Patel, S.; Pettyjohn-Robin, O.; Shah, A.; Goldwasser, T.; Sparklin, B.; Cronin, T.W. Mantis shrimp identify an object by its shape rather than its color during visual recognition. J. Exp. Biol. 2021, 224, jeb242256. [Google Scholar] [CrossRef]
- Temple, S.E.; How, M.J.; Powell, S.B.; Gruev, V.; Marshall, N.J.; Roberts, N.W. Thresholds of polarization vision in octopuses. J. Exp. Biol. 2021, 224, 7. [Google Scholar] [CrossRef]
- Heinze, S.; Homberg, U. Maplike representation of celestial E-vector orientations in the brain of an insect. Science 2007, 315, 995–997. [Google Scholar] [CrossRef] [PubMed]
- Freas, C.A.; Plowes, N.J.R.; Spetch, M.L. Not just going with the flow: Foraging ants attend to polarised light even while on the pheromone trail. J. Comp. Physiol. A—Neuroethol. Sens. Neural Behav. Physiol. 2019, 205, 755–767. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Du, T.; Liu, X.; Niu, B.; Guo, L. Method and Implementation of a Bioinspired Polarization-Based Attitude and Heading Reference System by Integration of Polarization Compass and Inertial Sensors. IEEE Trans. Ind. Electron. 2020, 67, 9802–9812. [Google Scholar] [CrossRef]
- Wu, X.; Shen, C.; Zhao, D.; Wang, C.; Cao, H.; Tang, J.; Liu, J. Robust Orientation Method Based on Atmospheric Polarization Model for Complex Weather. IEEE Internet Things J. 2023, 10, 5268–5279. [Google Scholar] [CrossRef]
- Dai, K.; Sun, B.; Wu, G.; Zhao, S.; Ma, F.; Zhang, Y.; Wu, J. LiDAR-Based Sensor Fusion SLAM and Localization for Autonomous Driving Vehicles in Complex Scenarios. J. Imaging 2023, 9, 52. [Google Scholar] [CrossRef]
- Outahar, M.; Moreau, G.; Normand, J.M. Direct and Indirect vSLAM Fusion for Augmented Reality. J. Imaging 2021, 7, 141. [Google Scholar] [CrossRef] [PubMed]
- Gupta, N.; Khan, N.M. Efficient and Scalable Object Localization in 3D on Mobile Device. J. Imaging 2022, 8, 188. [Google Scholar] [CrossRef]
- Xu, Q.Z.; Gao, Z.Z.; Yang, C.; Lv, J. High-Accuracy Positioning in GNSS-Blocked Areas by Using the MSCKF-Based SF-RTK/IMU/Camera Tight Integration. Remote Sens. 2023, 15, 3005. [Google Scholar] [CrossRef]
- Yang, J.T.; Xu, X.Y.; Chen, X.; Wang, Y.; Liu, R.Z. Polarized light compass-aided inertial navigation under discontinuous observations environment. Opt. Express 2022, 30, 19665–19683. [Google Scholar] [CrossRef]
- Lambrinos, D.; Moller, R.; Labhart, T.; Pfeifer, R.; Wehner, R. A mobile robot employing insect strategies for navigation. Robot. Auton. Syst. 2000, 30, 39–64. [Google Scholar] [CrossRef]
- Lambrinos, D. Navigation in desert ants: The robotic solution. Robotica 2003, 21, 407–426. [Google Scholar] [CrossRef]
- Chu, J.K.; Zhao, K.C.; Zhang, Q.; Wang, T. Design of a novel polarization sensor for navigation. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; p. 3161. [Google Scholar]
- Chu, J.K.; Zhao, K.C.; Zhang, Q.; Wang, T.C. Construction and performance test of a novel polarization sensor for navigation. Sens. Actuators A Phys. 2008, 148, 75–82. [Google Scholar] [CrossRef]
- Chu, J.K.; Wang, H.Q.; Chen, W.J.; Li, R.H. Application of a Novel Polarization Sensor to Mobile Robot Navigation. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 3763–3768. [Google Scholar]
- Ma, T.; Hu, X.P.; Lian, J.X.; Zhang, L.L. A Novel Calibration Model of Polarization Navigation Sensor. IEEE Sens. J. 2015, 15, 4241–4248. [Google Scholar] [CrossRef]
- Ma, T.; Hu, X.P.; Zhang, L.L.; He, X.F. Calibration of a polarization navigation sensor using the NSGA-II algorithm. Opt. Commun. 2016, 376, 107–114. [Google Scholar] [CrossRef]
- Dupeyroux, J.; Diperi, J.; Boyron, M.; Viollet, S.; Serres, J. A novel insect-inspired optical compass sensor for a hexapod walking robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3439–3445. [Google Scholar]
- Carey, N.; Sturzl, W.; IEEE. An Insect-Inspired Omnidirectional Vision System including UV-Sensitivity and Polarisation. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011. [Google Scholar]
- Sturzl, W.; IEEE. A Lightweight Single-Camera Polarization Compass with Covariance Estimation. In Proceedings of the 16th IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 5363–5371. [Google Scholar]
- Chu, J.K.; Wang, Z.W.; Zhang, Y.J.; Liu, Z.; Wang, Y.L. Integrated blue-sensitive polarization-dependent photodetector. J. Micro-Nanolithogr. MEMS MOEMS 2013, 12, 033005. [Google Scholar] [CrossRef]
- Chu, J.K.; Wang, Z.W.; Guan, L.; Liu, Z.; Wang, Y.L.; Zhang, R. Integrated Polarization Dependent Photodetector and Its Application for Polarization Navigation. IEEE Photonics Technol. Lett. 2014, 26, 469–472. [Google Scholar]
- Fan, C.; Hu, X.P.; Lian, J.X.; Zhang, L.L.; He, X.F. Design and Calibration of a Novel Camera-Based Bio-Inspired Polarization Navigation Sensor. IEEE Sens. J. 2016, 16, 3640–3648. [Google Scholar] [CrossRef]
- Ren, H.N.; Yang, J.; Liu, X.; Huang, P.P.; Guo, L. Sensor Modeling and Calibration Method Based on Extinction Ratio Error for Camera-Based Polarization Navigation Sensor. Sensors 2020, 20, 3779. [Google Scholar] [CrossRef]
- Li, G.M.; Zhang, Y.; Fan, S.W.; Wang, Y.Y.; Yu, F. Robust Heading Measurement Based on Improved Berry Model for Bionic Polarization Navigation. IEEE Trans. Instrum. Meas. 2023, 72, 11. [Google Scholar] [CrossRef]
- Wan, Z.H.; Zhao, K.C.; Li, Y.H.; Chu, J.K. Measurement error model of the bio-inspired polarization imaging orientation sensor. Opt. Express 2022, 30, 22–41. [Google Scholar] [CrossRef]
- Liu, X.; Li, W.S.; Huang, P.P.; Yang, Y.T.; Yang, J.; Guo, L. An Extended Polarization Sensor Model Considering the Influence of Obliquely Incident Direct Sunlight. IEEE Sens. J. 2022, 22, 18580–18590. [Google Scholar] [CrossRef]
- Fan, Z.G.; Wang, X.Q.; Jin, H.H.; Wang, C.; Pan, N.; Hua, D. Neutral point detection using the AOP of polarized skylight patterns. Opt. Express 2021, 29, 5665–5676. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.H.; Hu, Y.; Hao, Q.; Cao, J.; Cheng, Y.; Dong, L.Q.; Huang, X.M. Skylight polarization patterns under urban obscurations and a navigation method adapted to urban environments. Opt. Express 2021, 29, 42090–42105. [Google Scholar] [CrossRef]
- Lu, H.; Zhao, K.C.; You, Z.; Huang, K.L. Angle algorithm based on Hough transform for imaging polarization navigation sensor. Opt. Express 2015, 23, 7248–7262. [Google Scholar] [CrossRef]
- Han, G.L.; Zhang, L.L.; He, X.F.; He, R.G.; Mao, J.; Wu, X.S.; Hu, X.P. A Novel Orientation Method for Polarized Light Compass Under Tilted Conditions. IEEE Sens. J. 2020, 20, 10554–10563. [Google Scholar] [CrossRef]
- Han, G.L.; Hu, X.P.; Lian, J.X.; He, X.F.; Zhang, L.L.; Wang, Y.J.; Dong, F.L. Design and Calibration of a Novel Bio-Inspired Pixelated Polarized Light Compass. Sensors 2017, 17, 2623. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 220 | |
| [1.0269, 1.0, 1.038, 1.005] | |
| [1, 1, 1, 1] | |
| [0°, 45°, 90°, 135°] | |
| 0.05 | |
| [622.49, 515.06] | |
| [259.10, 259.20] | |
| [0.029274, −0.013300, 0.009758, −0.004919] | |
| Longitude | 126.7264° |
| Latitude | 45.6234° |
| 247.11° | |
| 60.21° |
| Device Name | Device Model | Parameters |
|---|---|---|
| Lucid polarization camera | PHXET050S-P | Resolution: 2048 × 2448, Frame rate: 22 FPS |
| Fujinon Fisheye Lens | FE185C057HA-1 | Focal length: 1.8 mm, view: 185.0° × 185.0° |
| FINS | — | Bias: 0.02 mg (1) (Accelerometer); Bias: 0.02°/h (1), ARW: 0.002°/ (Gyro). |
| 1 | 2 | 3 | 4 | 5 | 6 | Average | |
|---|---|---|---|---|---|---|---|
| Time | 11:33 | 12:18 | 12:56 | 13:29 | 15:07 | 16:29 | - |
| Traditional | 1.4931 | 1.3902 | 1.0988 | 0.7302 | 0.3546 | 0.2418 | 0.8848 |
| Proposed | 0.7905 | 0.8700 | 0.6574 | 0.4983 | 0.2590 | 0.1843 | 0.5433 |
| Ratio | 47.06% | 37.42% | 40.17% | 31.76% | 26.96% | 23.78% | 34.52% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Zhang, Y.; Fan, S.; Yu, F. An Improved Bio-Orientation Method Based on Direct Sunlight Compensation for Imaging Polarization Sensor. J. Imaging 2024, 10, 74. https://doi.org/10.3390/jimaging10040074
Li G, Zhang Y, Fan S, Yu F. An Improved Bio-Orientation Method Based on Direct Sunlight Compensation for Imaging Polarization Sensor. Journal of Imaging. 2024; 10(4):74. https://doi.org/10.3390/jimaging10040074
Chicago/Turabian StyleLi, Guangmin, Ya Zhang, Shiwei Fan, and Fei Yu. 2024. "An Improved Bio-Orientation Method Based on Direct Sunlight Compensation for Imaging Polarization Sensor" Journal of Imaging 10, no. 4: 74. https://doi.org/10.3390/jimaging10040074
APA StyleLi, G., Zhang, Y., Fan, S., & Yu, F. (2024). An Improved Bio-Orientation Method Based on Direct Sunlight Compensation for Imaging Polarization Sensor. Journal of Imaging, 10(4), 74. https://doi.org/10.3390/jimaging10040074