Open-Loop Dynamic Modeling of Low-Budget Batteries with Low-Power Loads


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Case Study
3. Modeling
- Identification of the relation between and SoC;
- Explanation of a method for finding the SoC relation to fulfill requirements of the low-budget batteries;
- Dynamic model identification.
3.1. Soc- Relation
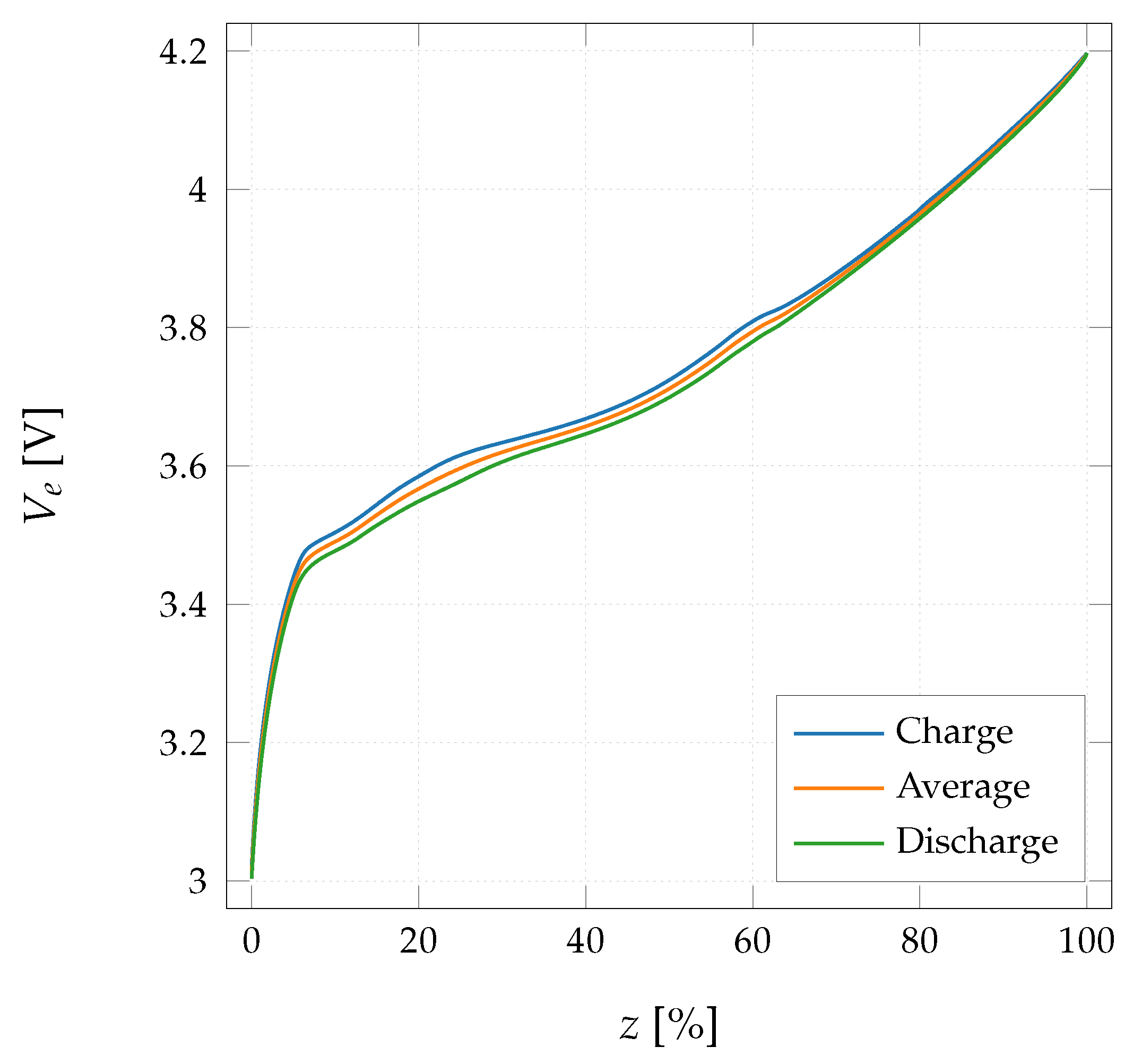
3.1.1. Continuous Discharge Method
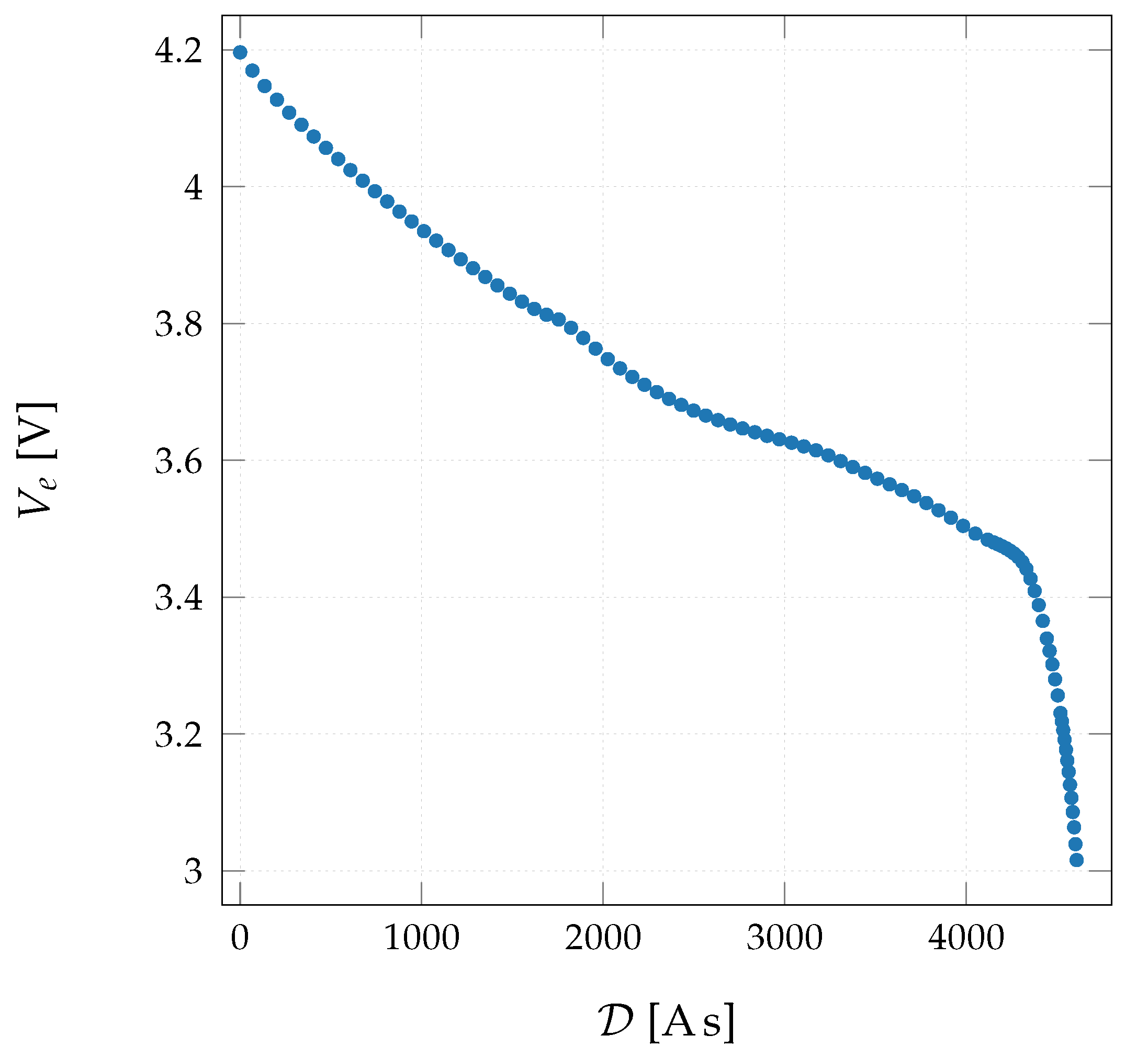
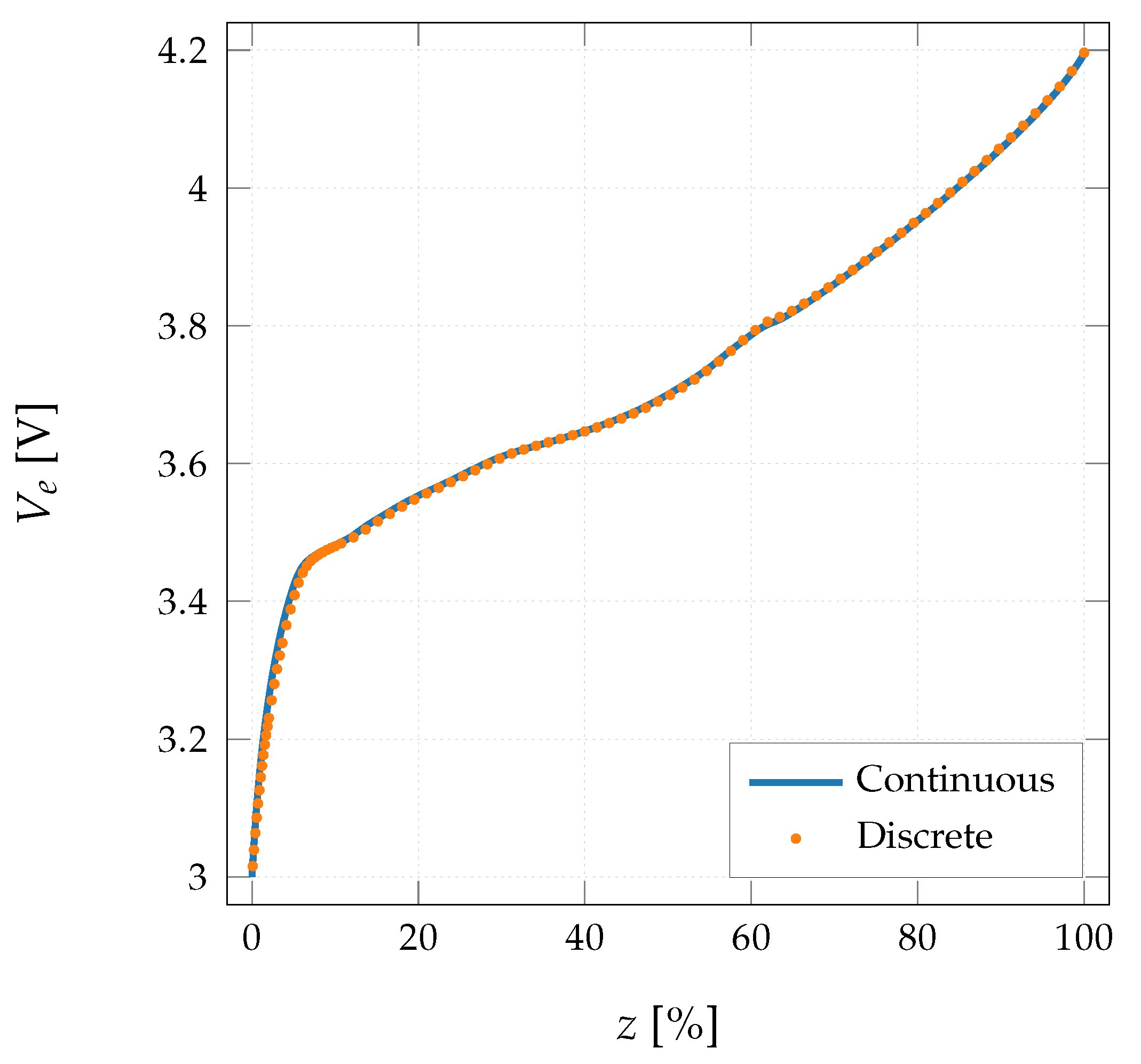
3.1.2. Discrete Discharge Method
3.2. Soc Estimation
- Ampere-hour (Coulomb counting);
- OCV based;
- Model based;
- Data driven;
- Impedance based;
- Based on the static characteristics;
- Non conventional.
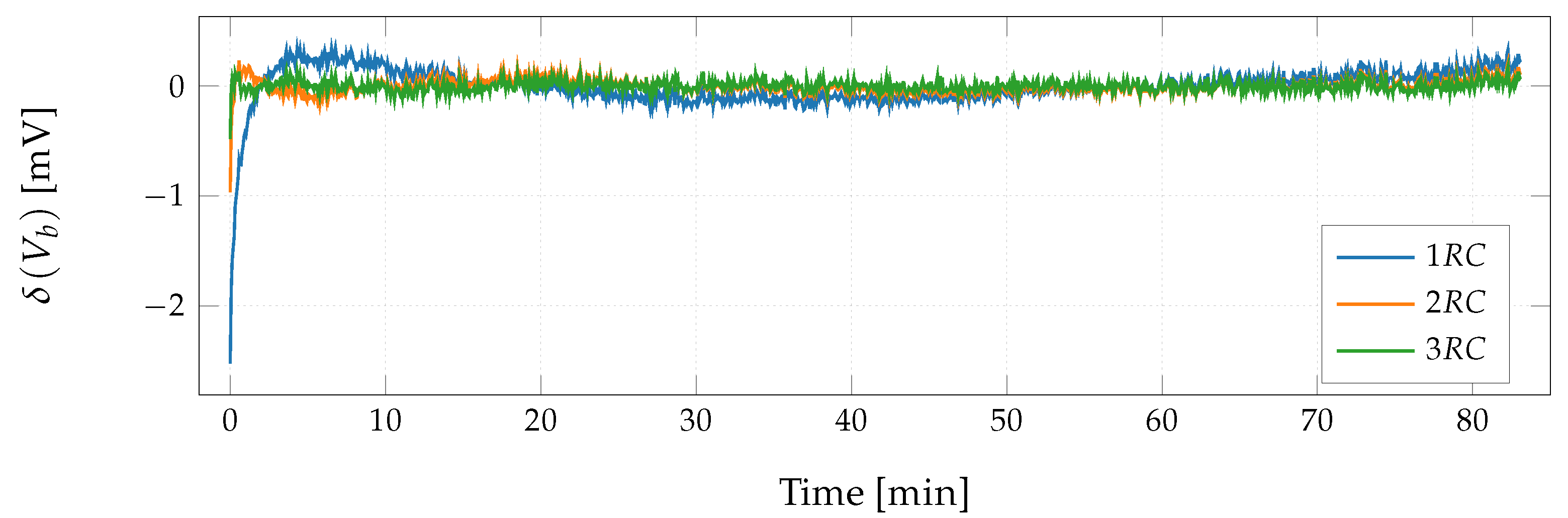
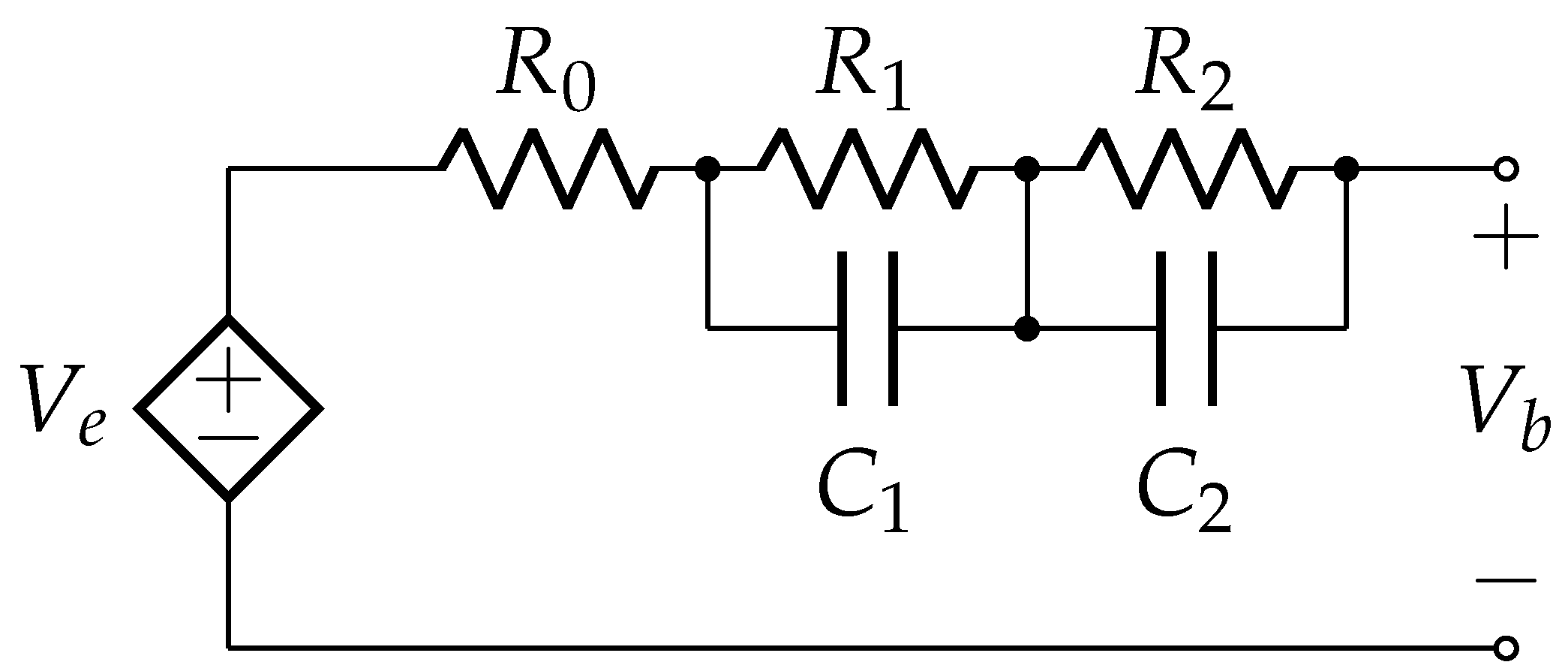
3.3. Dynamic Model
4. Evaluation
5. Conclusions and Future Works
- Difficulties of modeling low-budget batteries integrated in the low-power IoT and Industry 4.0 devices are addressed.
- High accuracy measurement of the low-power signals for the battery identification and modeling by SMUs is explained and programmed.
- Two common methods of continuous and discrete identification of the SoC-Ve relation are applied and compared.
- Validity of the continuous identification is proven but with the limitation of using very small currents in the scale of C/100.
- Hysteresis removal and consideration of production tolerances is included in the model.
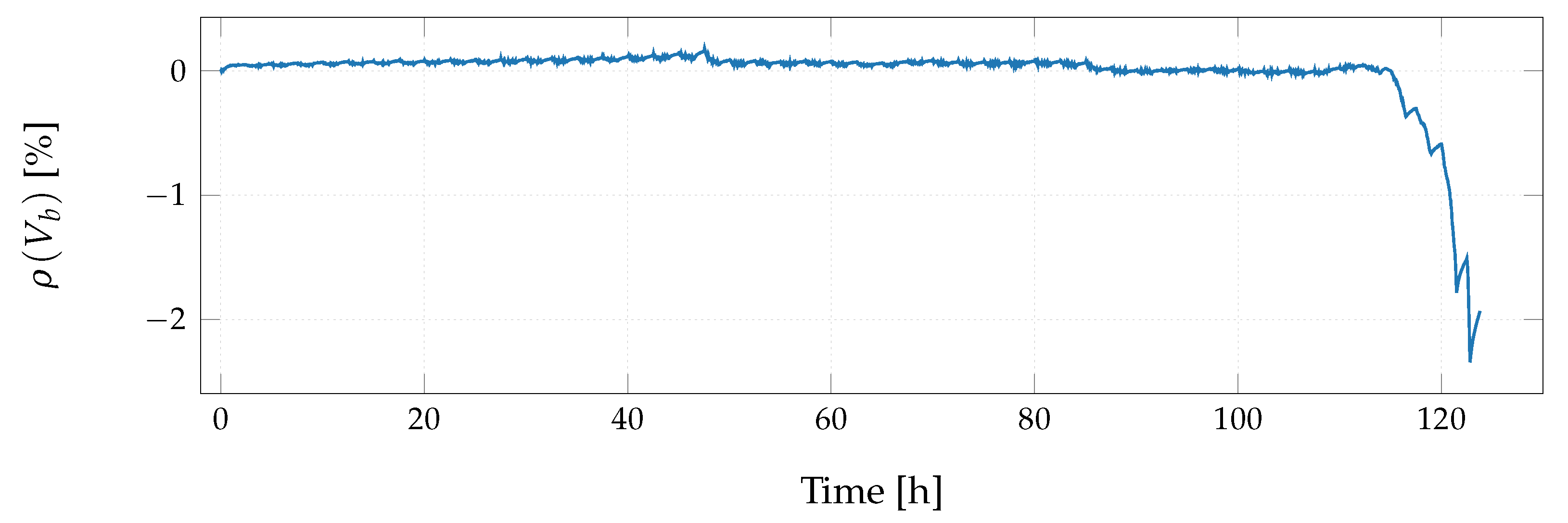
- A method for identifying the aging status of a low-budget battery without knowledge from the state of health curve is provided by use of normalized standard capacity tests.
- A heuristic equation for the current effect of low-power loads is formulated and tuned for the case study.
- SoC measurement formulation is modified to include a linear dynamic inter-cycle aging factor.
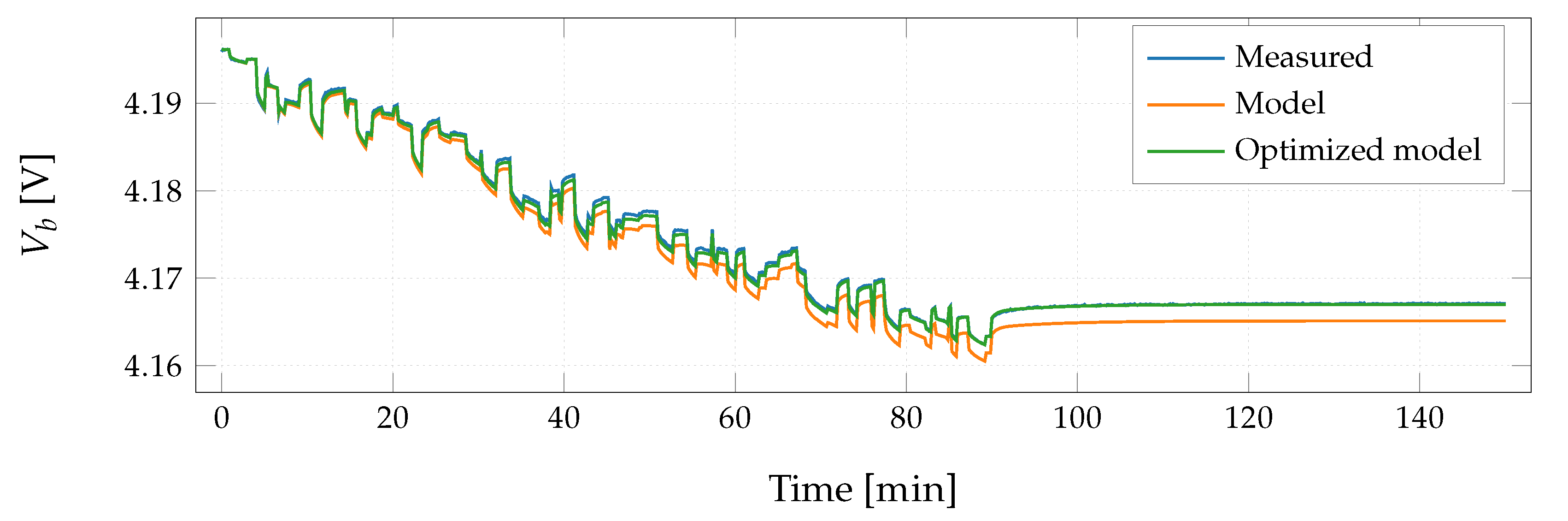
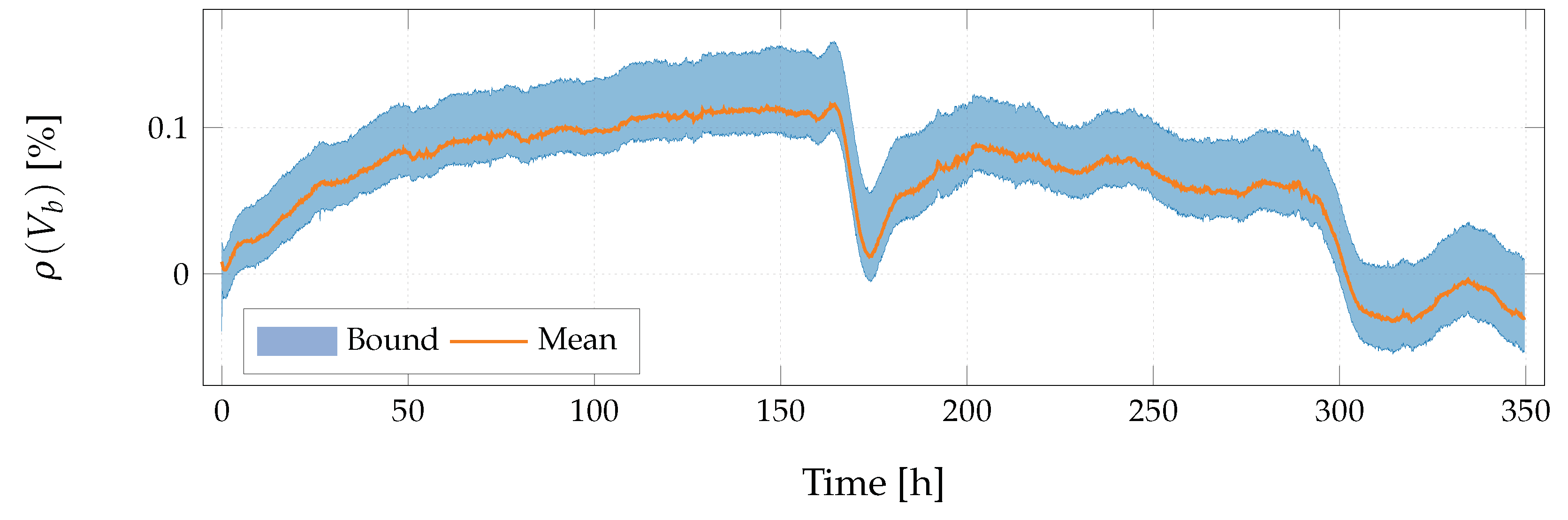
- Performance of the suggested model on two different experiments is evaluated showing relative errors less than %.
- Effect of the inter-cycle fast aging of the low-budget batteries is shown visually to prove necessity of the inter-cycle dynamic aging factor.
- Analysis of the inter-cycle aging in other battery technologies.
- Use of a more advanced and nonlinear inter-cycle aging factor.
- Electro-chemical formulation of the inter-cycle aging factor.
- Inclusion of a deductive current effect relation into the SoC relation for low-power loads.
- Application of the closed-loop methods for the SoC-Ve relation identification using low-power loads.
Funding
Conflicts of Interest
Appendix A. Measuring Processes
| Algorithm A1: Main program with the suggested order of experiments. |
 |
| Algorithm A2: Procedure of removing possible initial dynamics of a new battery. |
 |
| Algorithm A3: A general process to find the relative aging status of the battery. |
| Charge the battery to the unified initial point using Algorithm A4; Discharge the battery with the nominal current; Find the relative aging status from Equation (4); |
| Algorithm A4: Process of charging the battery to the fully charged initial state. |
 |
| Algorithm A5: A process for identification of the SoC-Ve relation in the discrete form. |
 |
| Algorithm A6: Procedure of collecting evaluation data by application of subsequent randomly selected pulses. |
 |
References
- Masoudinejad, M.; Magno, M.; Benini, L.; ten Hompel, M. Average Modelling of State-of-the-Art Ultra-low Power Energy Harvesting Converter IC. In Proceedings of the 2018 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 99–104. [Google Scholar]
- Jafari, M.; Khan, K.; Gauchia, L. Deterministic models of Li-ion battery aging: It is a matter of scale. J. Energy Storage 2018, 20, 67–77. [Google Scholar] [CrossRef]
- Baghdadi, I.; Briat, O.; Delétage, J.Y.; Gyan, P.; Vinassa, J.M. Lithium battery aging model based on Dakin’s degradation approach. J. Power Sources 2016, 325, 273–285. [Google Scholar] [CrossRef]
- Borza, P.N.; Machedon-Pisu, M.; Hamza-Lup, F. Design of Wireless Sensors for IoT with Energy Storage and Communication Channel Heterogeneity. Sensors 2019, 19, 3364. [Google Scholar] [CrossRef] [PubMed]
- Falkenberg, R.; Masoudinejad, M.; Buschhoff, M.; Ramachandran Venkatapathy, A.K.; Friesel, D.; Hompel, M.T.; Spinczyk, O.; Wietfeld, C. PhyNetLab: An IoT-based warehouse testbed. In Proceedings of the Federated Conference on Computer Science and Information Systems (FedCSIS), Prague, Czech Republic, 3–6 September 2017; pp. 1051–1055. [Google Scholar]
- Ramachandran Venkatapathy, A.K.; Riesner, A.; Roidl, M.; Emmerich, J.; ten Hompel, M. PhyNode: An intelligent, cyber-physical system with energy neutral operation for PhyNetLab. In Proceedings of the European Conference on Smart Objects, Systems and Technologies (Smart SysTech), VDE-Verl, Aachen, Germany, 16–17 June 2015; pp. 1–8. [Google Scholar]
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical Review on the Battery State of Charge Estimation Methods for Electric Vehicles. IEEE Access 2018, 6, 1832–1843. [Google Scholar] [CrossRef]
- Barai, A.; Widanage, W.D.; Marco, J.; McGordon, A.; Jennings, P. A study of the open circuit voltage characterization technique and hysteresis assessment of lithium-ion cells. J. Power Sources 2015, 295, 99–107. [Google Scholar] [CrossRef]
- Plett, G.L. Battery Management Systems, Volume I: Battery Modeling; Artech House: Norwood, MA, USA, 2015. [Google Scholar]
- Jongerden, M.R.; Haverkort, B.R. Which battery model to use? IET Softw. 2009, 3, 445–457. [Google Scholar] [CrossRef]
- Chen, X.; Lei, H.; Xiong, R.; Shen, W.; Yang, R. A novel approach to reconstruct open circuit voltage for state of charge estimation of lithium ion batteries in electric vehicles. Appl. Energy 2019, 255, 113758. [Google Scholar] [CrossRef]
- Song, Y.; Park, M.; Seo, M.; Kim, S.W. Improved SOC estimation of lithium-ion batteries with novel SOC-OCV curve estimation method using equivalent circuit model. In Proceedings of the 2019 4th International Conference on Smart and Sustainable Technologies (SpliTech), Split, Croatia, 18–21 June 2019; pp. 1–6. [Google Scholar]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Broussely, M.; Biensan, P.; Bonhomme, F.; Blanchard, P.; Herreyre, S.; Nechev, K.; Staniewicz, R.J. Main aging mechanisms in Li ion batteries. J. Power Sources 2005, 146, 90–96. [Google Scholar] [CrossRef]
- Hu, X.; Zou, C.; Zhang, C.; Li, Y. Technological Developments in Batteries: A Survey of Principal Roles, Types, and Management Needs. IEEE Power Energy Mag. 2017, 15, 20–31. [Google Scholar] [CrossRef]
- Li, S.; He, H.; Su, C.; Zhao, P. Data driven battery modeling and management method with aging phenomenon considered. Appl. Energy 2020, 275, 115340. [Google Scholar] [CrossRef]
- Masoudinejad, M. Power analysis of PhyNode; Technical Report; TU Dortmund University: Dortmund, Germany, 2018. [Google Scholar]
- Masoudinejad, M. Programs for Measuring Low-Budget Batteries Using Keysight High Accuracy Source Measurement Units. 2020. Available online: https://github.com/masoudinejad/BatteryMeasuring (accessed on 10 October 2020).
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Sauer, D.U. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Satyan, P.A.; Sutar, R. A Survey on Data-Driven Methods for State of Charge Estimation of Battery. In Proceedings of the 2020 International Conference on Electronics and Sustainable Communication Systems (ICESC), Coimbatore, India, 28–30 April 2020; pp. 996–1004. [Google Scholar]



















© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masoudinejad, M. Open-Loop Dynamic Modeling of Low-Budget Batteries with Low-Power Loads. Batteries 2020, 6, 50. https://doi.org/10.3390/batteries6040050
Masoudinejad M. Open-Loop Dynamic Modeling of Low-Budget Batteries with Low-Power Loads. Batteries. 2020; 6(4):50. https://doi.org/10.3390/batteries6040050
Chicago/Turabian StyleMasoudinejad, Mojtaba. 2020. "Open-Loop Dynamic Modeling of Low-Budget Batteries with Low-Power Loads" Batteries 6, no. 4: 50. https://doi.org/10.3390/batteries6040050
APA StyleMasoudinejad, M. (2020). Open-Loop Dynamic Modeling of Low-Budget Batteries with Low-Power Loads. Batteries, 6(4), 50. https://doi.org/10.3390/batteries6040050