
A State-of-Charge-Frequency Control Strategy for Grid-Forming Battery Energy Storage Systems in Black Start


Abstract
1. Introduction
- To establish an SOC-frequency control mechanism that explicitly integrates the state-of-charge (SOC) into the control loop, enabling autonomous power adjustment according to real-time frequency deviations.
- To enhance frequency regulation and implicit energy management simultaneously, achieving a dual benefit of improved dynamic frequency support and sustainable energy utilization during long-duration black start processes.
- To design and optimize the control parameters, including the high-gain observer (HGO), ensuring stable and robust performance under varying frequency and load conditions.
- To validate the proposed strategy through simulations and HIL experiments, demonstrating its practical feasibility beyond purely simulation-based studies.
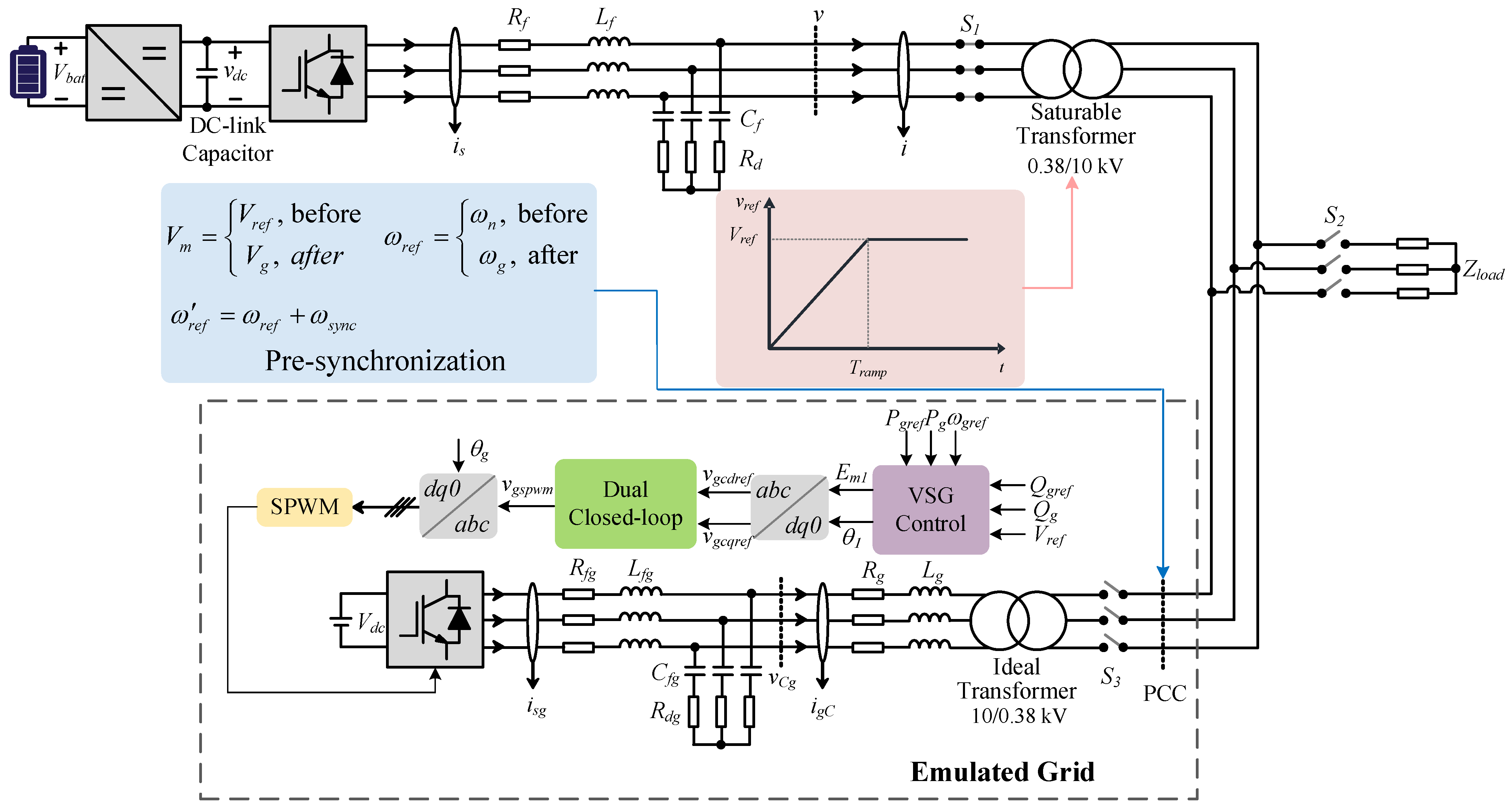
2. System Description
3. Proposed Control Strategies
3.1. DC-AC Inverter Control
3.1.1. Matching Control
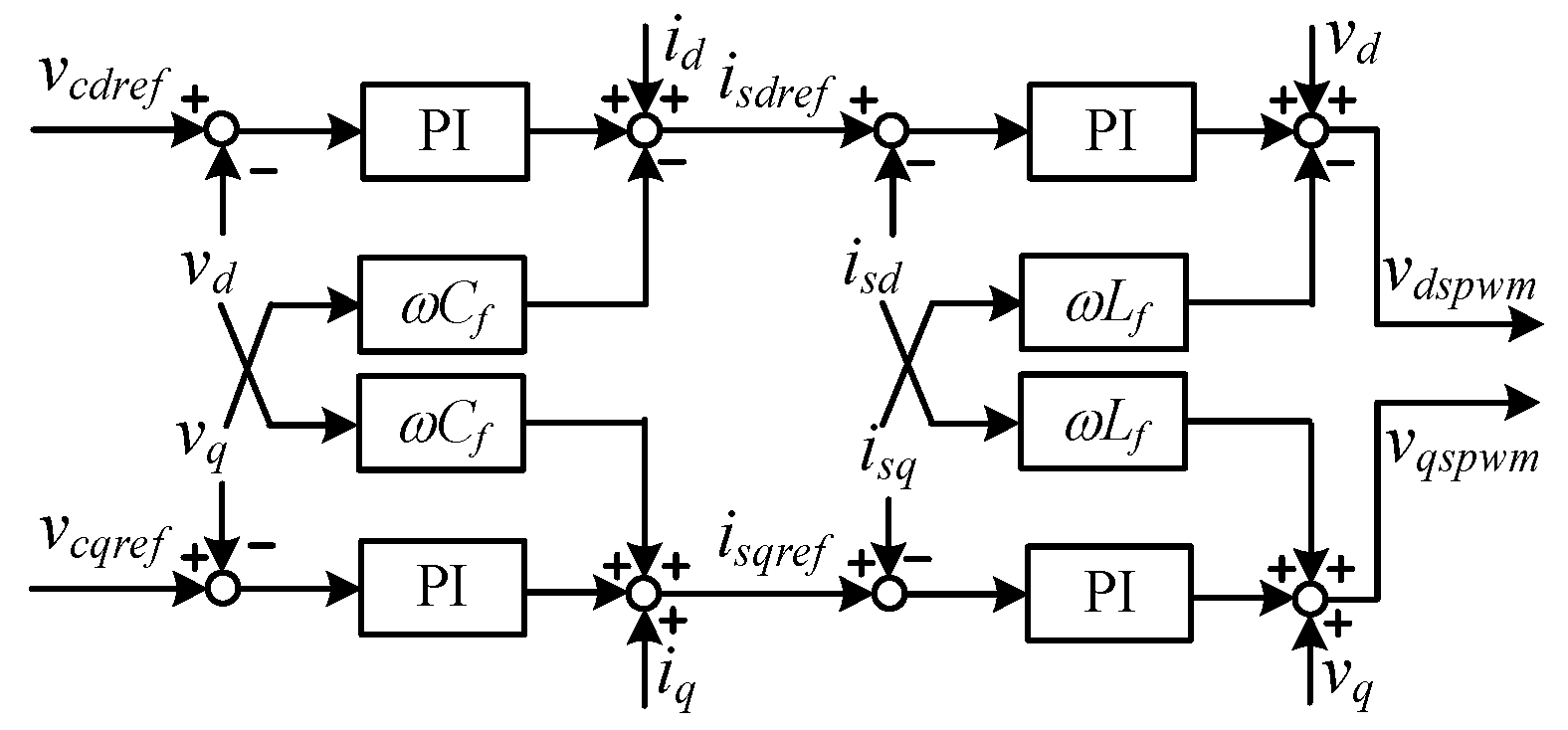
3.1.2. Dual Closed-Loop Control
3.2. DC-DC Converter Control
3.2.1. Proposed Control Strategy
- Given the coupling between vdc and w, the capacitor can serve as an auxiliary element for frequency regulation. Meanwhile, the DC/DC converter is responsible for responding to long-duration and large-magnitude disturbances.
- As the goal is to regulate the BESS output, the SOC can be used as a basis for establishing a droop-like relationship between the output power and frequency.
3.2.2. Design of the High-Gain Observer
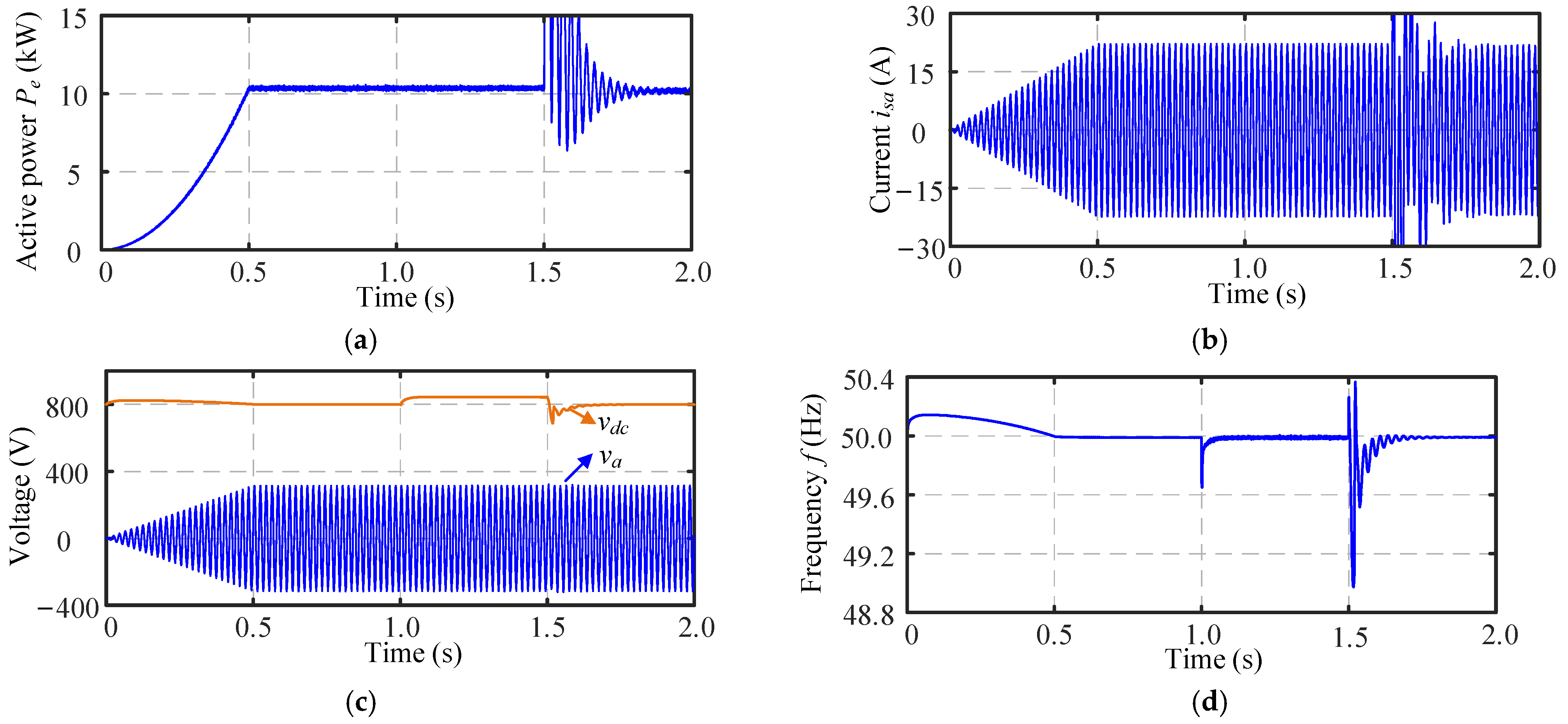
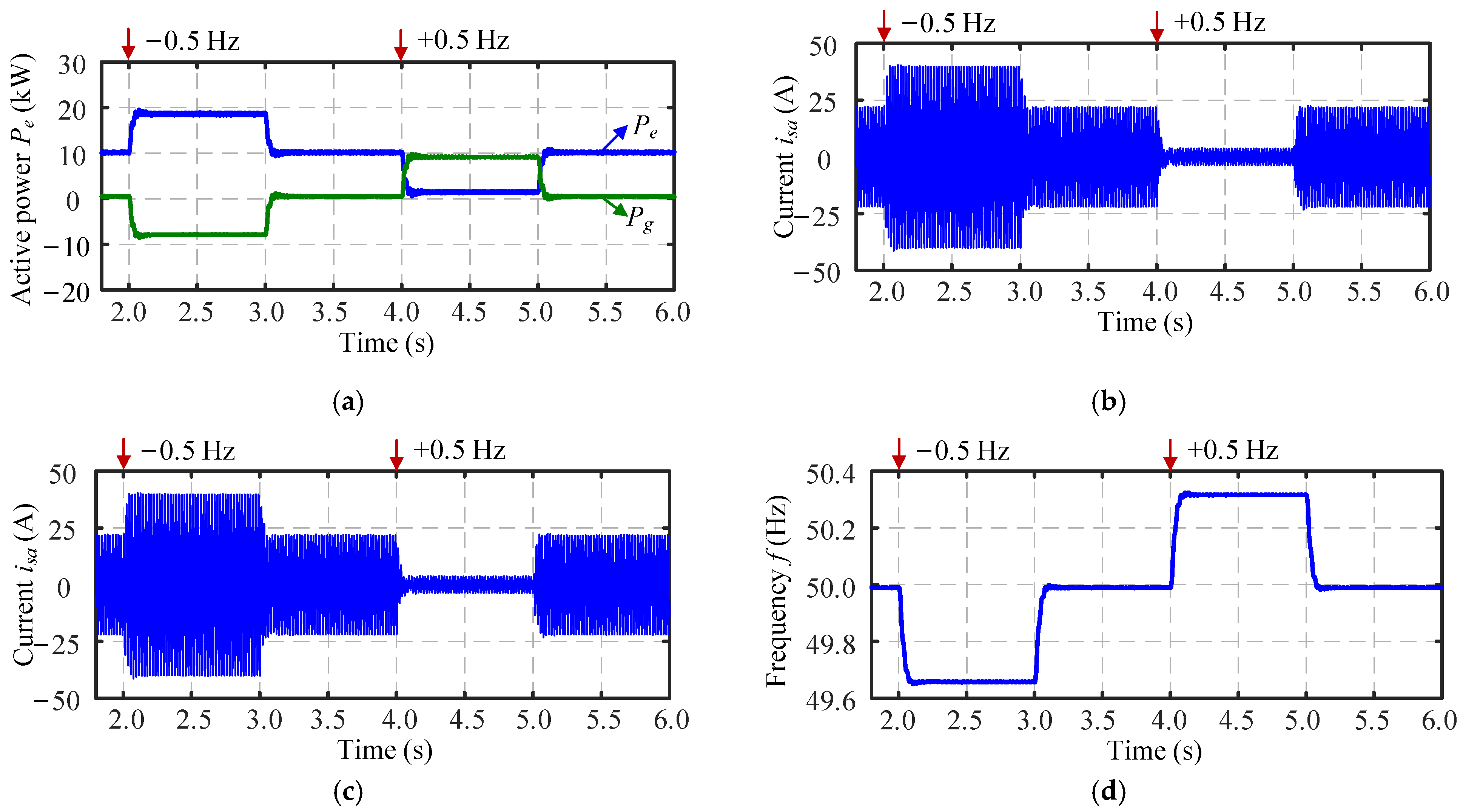
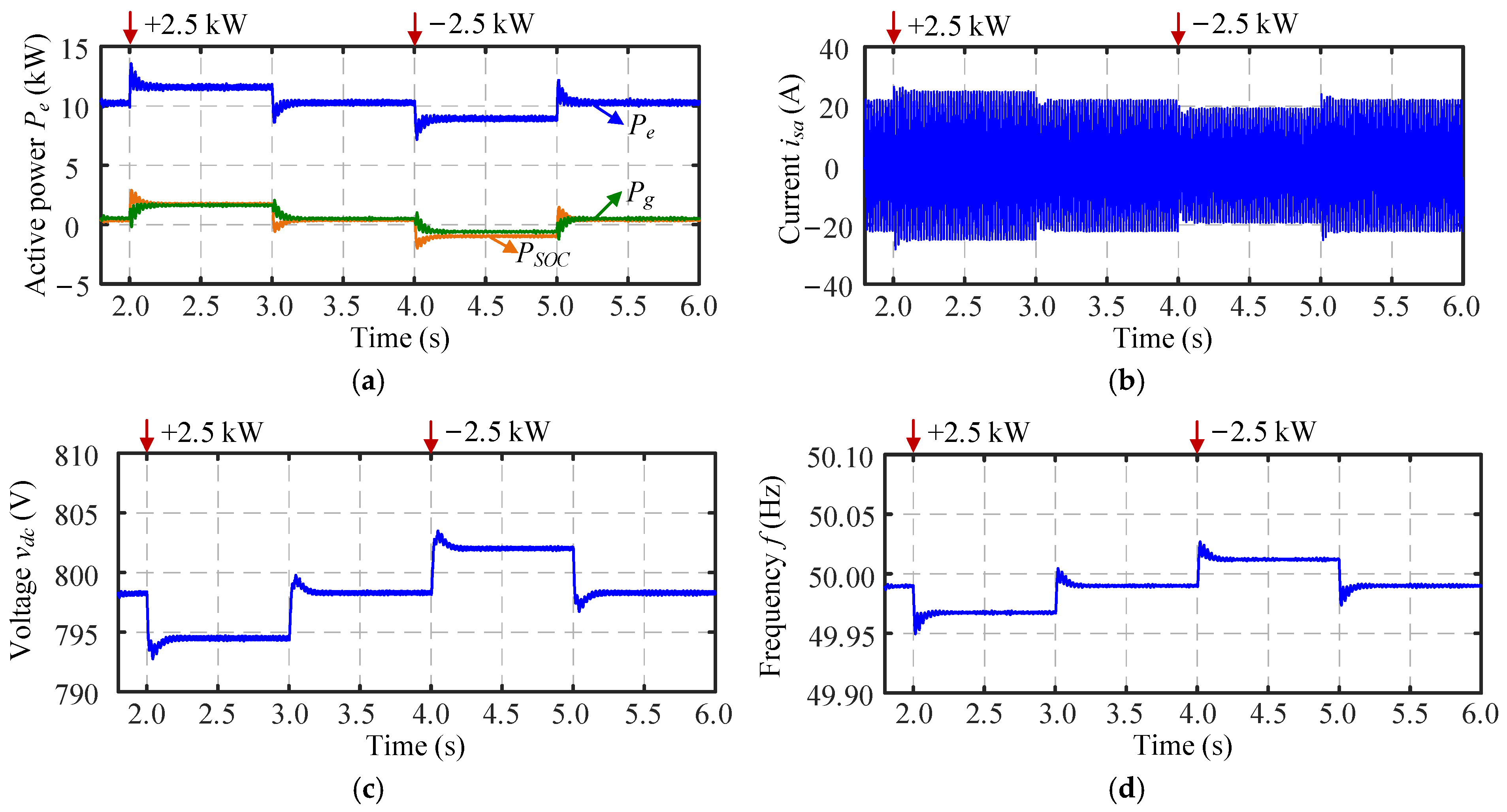
4. Simulation Results
4.1. 0.5-Hz Frequency Change
4.2. 10% Power Change
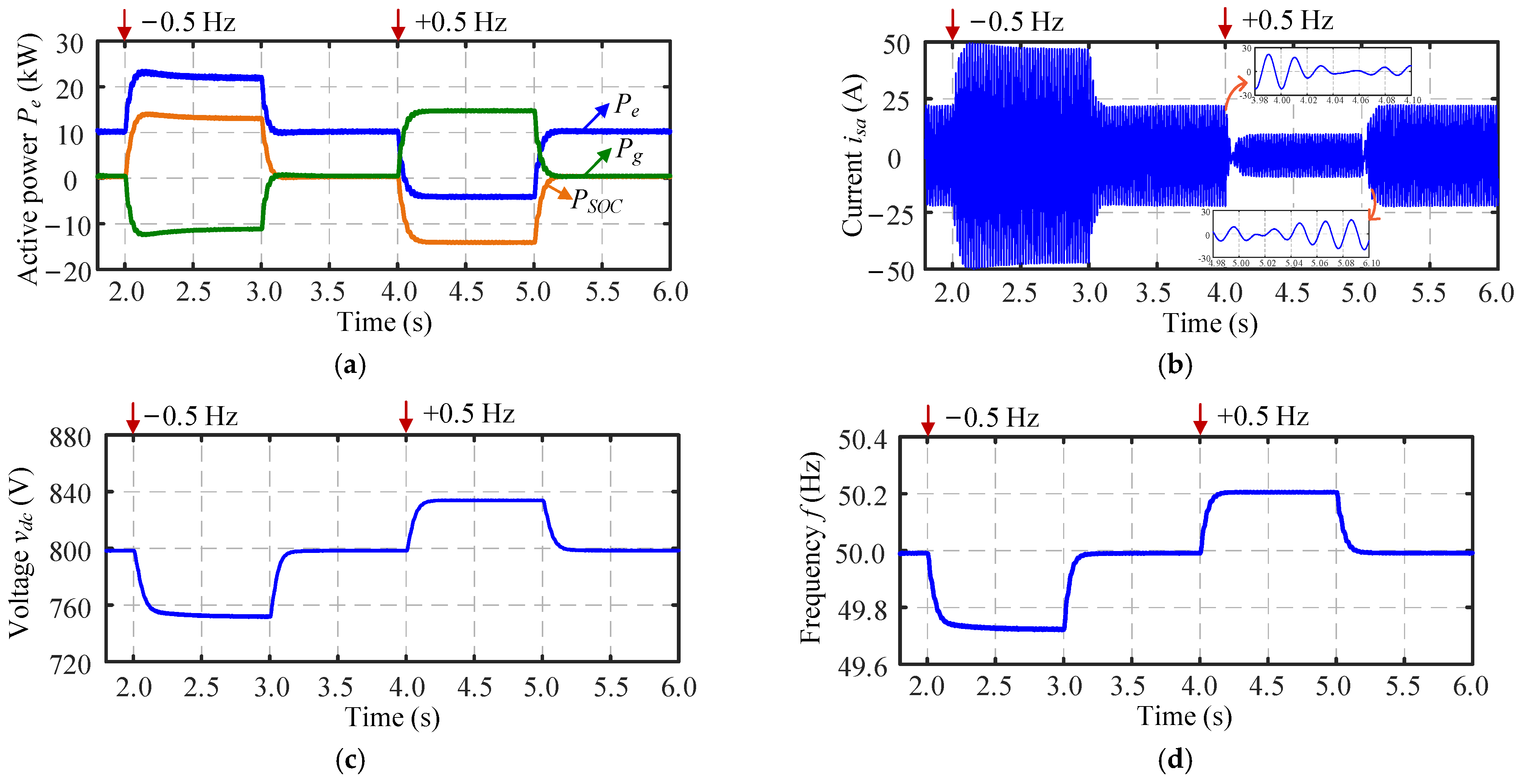
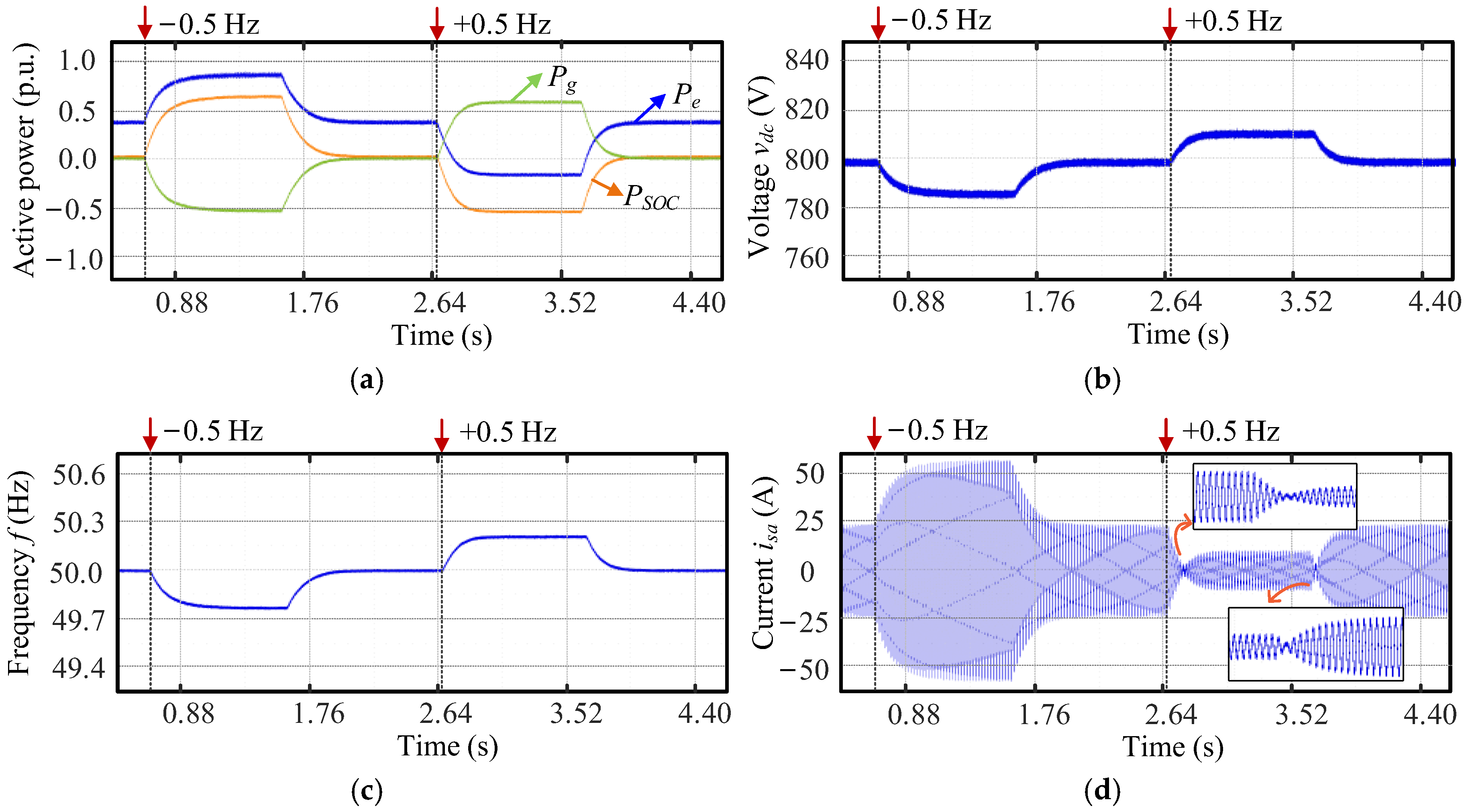
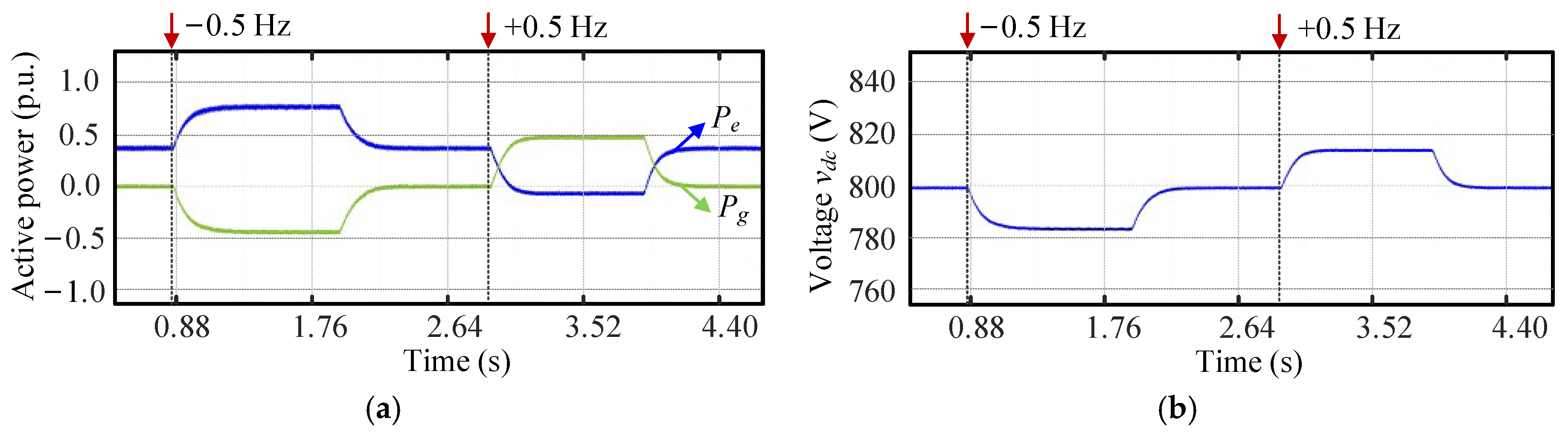
5. Experimental Validation
5.1. 0.5-Hz Frequency Change
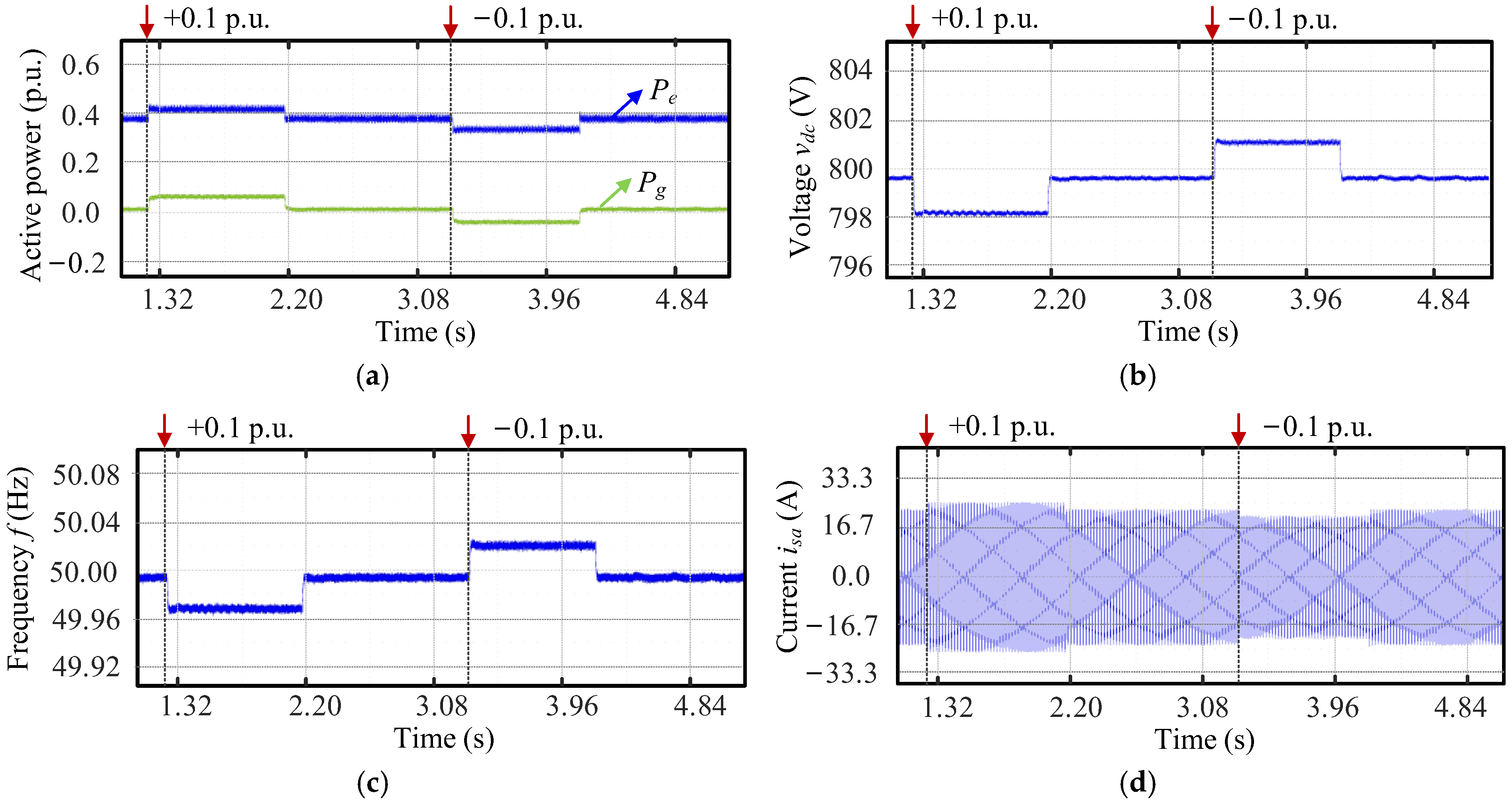
5.2. 10% Power Change
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Meng, L. Fast Frequency Response from Energy Storage Systems—A Review of Grid Standards, Projects and Technical Issues. IEEE Trans. Smart Grid 2020, 11, 1566–1581. [Google Scholar] [CrossRef]
- Smith, C.; Gargoom, A.; Arif, M.T.; Haque, M.E. Control Techniques for Grid Forming Inverters: A Comparative Analysis. In Proceedings of the 2022 IEEE Industry Applications Society Annual Meeting (IAS), Detroit, MI, USA, 9–14 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–9. [Google Scholar]
- Li, Y.; Gu, Y.; Green, T.C. Revisiting Grid-Forming and Grid-Following Inverters: A Duality Theory. IEEE Trans. Power Syst. 2022, 37, 4541–4554. [Google Scholar] [CrossRef]
- Liu, L.; Wu, J.; Mi, Z.; Sun, C. A feasibility study of applying storage-based wind farm as black-start power source in local power grid. In Proceedings of the 2016 International Conference on Smart Grid and Clean Energy Technologies (ICSGCE), Chengdu, China, 19–22 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 257–261. [Google Scholar]
- Rodriguez-Amenedo, J.L.; Montilla-DJesus, M.E.; Arnaltes, S.; Arredondo, F. RMS Modeling and Control of a Grid-Forming E-STATCOM for Power System Stability in Isolated Grids. Appl. Sci. 2025, 15, 3014. [Google Scholar] [CrossRef]
- Zhou, Z.; Pugliese, S.; Langwasser, M.; Liserre, M. Subsynchronous Damping by Battery Storage System in Grid-Forming Control. IEEE Trans. Power Electron. 2024, 39, 4173–4186. [Google Scholar] [CrossRef]
- Khalid, A.; Stevenson, A.; Sarwat, A.I. Overview of Technical Specifications for Grid-Connected Microgrid Battery Energy Storage Systems. IEEE Access 2021, 9, 163554–163593. [Google Scholar] [CrossRef]
- Antunes, H.M.A.; Silva, S.M.; Brandao, D.I.; Machado, A.A.P.; Ferreira, R.V. A fault-tolerant grid-forming converter applied to AC microgrids. Int. J. Electr. Power Energy Syst. 2020, 121, 106072. [Google Scholar] [CrossRef]
- Pattabiraman, D.; Lasseter, R.H.; Jahns, T.M. Comparison of Grid Following and Grid Forming Control for a High Inverter Penetration Power System. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Wang, H.; Wang, H. Black Start Scheme of Wind-storage Combined System Based on Virtual Synchronous Generator Control. In Proceedings of the 2023 2nd Asia Conference on Electrical, Power and Computer Engineering (EPCE), Xiamen, China, 22–24 April 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 60–64. [Google Scholar]
- Noris, L.; Rueda, J.L.; Rakhshani, E.; Korai, A.W. Power System Black-Start and Restoration with High Share of Power-Electronic Converters. In Proceedings of the 2019 IEEE Power & Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Pagnani, D.; Kocewiak, L.; Hjerrild, J.; Blaabjerg, F.; Bak, C.L.; Blasco-Gimenez, R.; Martínez-Turégano, J. Power System Restoration Services by Grid-Forming Offshore Wind Farms with Integrated Energy Storage. In Proceedings of the 2023 IEEE Power & Energy Society General Meeting (PESGM), Orlando, FL, USA, 16–20 July 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–5. [Google Scholar]
- Chaudhary, S.K.; Teodorescu, R.; Svensson, J.R.; Kocewiak, L.H.; Johnson, P.; Berggren, B. Black Start Service from Offshore Wind Power Plant using IBESS. In Proceedings of the 2021 IEEE Madrid PowerTech, Madrid, Spain, 27 June–2 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Tang, X.; Qi, Z. Energy storage control in renewable energy based microgrid. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–6. [Google Scholar]
- Burroughs, H.; Klauber, C.; Sun, C.-C.; Culler, M. Black Start with Inverter-Based Resources: Hardware Testing. In Proceedings of the 2023 IEEE Power & Energy Society General Meeting (PESGM), Orlando, FL, USA, 27–31 July 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–5. [Google Scholar]
- Zhao, Y.; Liu, S.; Han, Y.; Yang, T.; Zhao, A. Practical Verification and Analysis of Grid-Forming Energy Storage Technology based on Black Start Testing of Pure New Energy Sources. In Proceedings of the 2024 International Conference on New Power System and Power Electronics (NPSPE), Dalian, China, 16–18 August 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 60–68. [Google Scholar]
- Jing, Z.; Zhang, H.; Yang, P. Research on control system of new energy storage combined thermal power unit based on improved voltage droop control. In Proceedings of the 2024 6th International Conference on Intelligent Control, Measurement and Signal Processing (ICMSP), Xi’an, China, 29 November–1 December 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 16–21. [Google Scholar]
- Zhang, Z.; Zhang, H.; Gong, X.; Cheng, X.; Zhou, S.; Yu, H. Research on the Control Strategy for Black Start of Power Grid with Large-Capacity Energy Storage. In Proceedings of the 2020 12th IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Nanjing, China, 20–23 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar]
- Shahparasti, M.; Kauhaniemi, K.; Lauttamus, P.; Strandberg, S.; Strandberg, J. Inrush Current Management During Medium Voltage Microgrid Black Start with Battery Energy Storage System. IEEE Access 2022, 10, 42287–42296. [Google Scholar] [CrossRef]
- Li, J.; You, H.; Qi, J.; Kong, M.; Zhang, S.; Zhang, H. Stratified Optimization Strategy Used for Restoration with Photovoltaic-Battery Energy Storage Systems as Black-Start Resources. IEEE Access 2019, 7, 127339–127352. [Google Scholar] [CrossRef]
- Xia, L.; Zhang, M.; Ma, S.; Zhuang, G.; Yu, K. Analysis of the Soft-Start Circuit of the High Voltage Power Supply Based on PSM Technology. IEEE Trans. Plasma Sci. 2014, 42, 1026–1031. [Google Scholar] [CrossRef]
- Wu, J.; Zhuo, F.; Wang, Z.; Yi, H.; Yu, K. Pre-synchronization method for grid-connection of virtual synchronous generators based micro-grids. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. P.1–P.8. [Google Scholar]
- Huang, L.; Xin, H.; Wang, Z.; Wu, K.; Wang, H.; Hu, J.; Lu, C. A Virtual Synchronous Control for Voltage-Source Converters Utilizing Dynamics of DC-Link Capacitor to Realize Self-Synchronization. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1565–1577. [Google Scholar] [CrossRef]
- Ai, C.; Li, Y.; Zhao, Z.; Gu, Y.; Liu, J. An Extension of Grid-Forming: A Frequency-Following Voltage-Forming Inverter. IEEE Trans. Power Electron. 2024, 39, 12118–12123. [Google Scholar] [CrossRef]
- Li, S.; Li, J.; Mo, Y. Piezoelectric Multimode Vibration Control for Stiffened Plate Using ADRC-Based Acceleration Compensation. IEEE Trans. Ind. Electron. 2014, 61, 6892–6902. [Google Scholar] [CrossRef]
- Dabroom, A.; Khalil, H.K. Numerical differentiation using high-gain observers. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 12 December 1997; IEEE: Piscataway, NJ, USA, 1997; pp. 4790–4795. [Google Scholar]
- De Carne, G.; Maroufi, S.M.; Beiranvand, H. The role of energy storage systems for a secure energy supply: A comprehensive review of system needs and technology solutions. Electr. Power Syst. Res. 2024, 236, 110963. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Lf, Lfg | 3 mH | Rf, Rfg | 0.1 Ω |
| Cf, Cfg | 10 µF | Rd, Rdg | 1.2 Ω |
| Lg | 1.5 mH | Rg | 0.1 Ω |
| Vdc | 800 V | wn, wgref | 314 rad/s |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| vdcref | 800 V | KT | 70 V2·F·J−1 |
| KJ | 15,700 kg·m2·F−1 | KD | 3.0 × 106 J·rad−1·F−1 |
| Kq | 0.0031 A | Pset | 10 kW |
| ks | 0.00148 s−1 | En | 5 V·Ah |
| K | 0.02 s−1·Hz−1 | Pgref | 0 kW |
| Qgref | 0 kVar | Vref | 311 V |
| a1 | 2 | a2 | 1 |
| ε | 5.0 × 10−5 | Ts | 1.0 × 10−4 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Y.; Yang, Y. A State-of-Charge-Frequency Control Strategy for Grid-Forming Battery Energy Storage Systems in Black Start. Batteries 2025, 11, 296. https://doi.org/10.3390/batteries11080296
Yuan Y, Yang Y. A State-of-Charge-Frequency Control Strategy for Grid-Forming Battery Energy Storage Systems in Black Start. Batteries. 2025; 11(8):296. https://doi.org/10.3390/batteries11080296
Chicago/Turabian StyleYuan, Yunuo, and Yongheng Yang. 2025. "A State-of-Charge-Frequency Control Strategy for Grid-Forming Battery Energy Storage Systems in Black Start" Batteries 11, no. 8: 296. https://doi.org/10.3390/batteries11080296
APA StyleYuan, Y., & Yang, Y. (2025). A State-of-Charge-Frequency Control Strategy for Grid-Forming Battery Energy Storage Systems in Black Start. Batteries, 11(8), 296. https://doi.org/10.3390/batteries11080296