1. Introduction
Environmental pollution and energy crisis have always been two serious problems faced by the global community; lithium-ion batteries have been widely used in 3C electronics, renewable energy storage, new energy vehicles, aerospace, and other fields because of their high energy density, high voltage, long life, green, and many other advantages [
1,
2,
3]. Battery performance degradation is the main reason affecting the use of batteries. On the one hand, the battery undergoes operational aging as usage time increases and when it faces external stress factors such as overcharging, excessive discharging, elevated temperatures, and overcurrent [
4]. This leads to a gradual decrease in the usable capacity of the battery, seriously affecting the reliability and safety of the device [
5]. On the other hand, prematurely replacing batteries also leads to unnecessary consumption of battery materials [
6,
7]. Hence, it becomes crucial to precisely predict the remaining useful life (RUL) of lithium-ion batteries.
A battery reaches its end of life (EOL) when its capacity drops to 70–80% of its rated capacity [
8,
9]. Battery RUL represents the duration from its present condition to the initial failure, as shown in Equation (1), where
is the battery life obtained from the battery life experiments;
denotes the battery’s current usage time. However, most studies usually define the rule life only based on cyclic aging, which is specifically defined as the cycle count necessary for a battery’s maximum usable capacity to diminish to a predetermined failure threshold, under specific charging and discharging conditions, as demonstrated in Equation (2). Where
is the number of cycles to cutoff battery failure and
is the current number of cycles. We use the second one to calculate the RUL.
In general, RUL prediction methods can be divided into model-based methods and data-driven methods. The model-based approaches, which include empirical, electrochemical, and equivalent circuit models, rely on the intricate internal degradation mechanisms of batteries [
10,
11]. However, achieving precise prediction with model-based methods is challenging due to the evolving chemical mechanisms within the battery over time. Currently, the flexibility, adaptability, and simplicity of data-driven methods make them an important method for battery life prediction [
12,
13]. Methods based on data-driven have the ability to extract degradation information from historical data of lithium-ion batteries without requiring specific mathematical models, highlighting their distinctive importance in predicting the remaining useful life (RUL) of batteries [
14,
15].
Typically, a data-driven approach extracts health features (HFs) from a battery’s charging or discharging profiles to characterize battery degradation and trains a machine learning model or a deep learning model to learn the mapping between these features and the battery capacity [
16]. Finally, the trained model is used to predict the test battery, and when the predicted capacity reaches the EOL, the RUL value of the battery is obtained. Currently, a large number of studies have been devoted to the extraction of HFs, e.g., the minimum and maximum values of the charging curve and their corresponding times, the charging duration, the slope of the voltage curve, the differential capacity (dQ/dV) and the differential voltage (dV/dQ), the entropy of the discharge voltage, the slope of the voltage at equal capacity intervals, electrochemical impedance features, etc. [
17,
18,
19,
20]. Sajad et al. [
21] proposed a practical method to analyze and extract 19 features generated by dQ/dV and dV/dQ curves for early prediction of the RUL of batteries using the sparse Bayesian learning method. Fu et al. [
22] developed a method that employs an incremental slope (IS) for feature extraction, leveraging detailed analysis of battery aging data to derive generalized multidimensional features suited for various operating conditions. Li et al. [
23] performed studies on the charging and discharging processes of batteries subjected to vibrational stress. They began with iso discharge voltage time sequences from top to bottom to identify indirect health indicators and showcased the estimation of battery capacity using these indicators through gray correlation analysis.
Nevertheless, challenges persist in extracting health features from measured parameters (e.g., voltage, current, and temperature) [
24]. Some health features, including internal impedance and temperature distribution, demand precise measurement techniques or continuous monitoring. Additionally, extraction methods often lack generalizability, restricting the applicability of models [
16]. Therefore, there have been studies that no longer perform artificial feature extraction and directly predict future trajectories based on the collected data such as voltage, current, capacity, etc., and thus predict the battery RUL. Zhou et al. [
25] proposed a method for predicting RUL using the autoregressive integrated moving average (ARIMA) model; however, this model necessitates highly stable time series data and stringent operating conditions for the battery. Ma et al. [
26] proposed a CNN-LSTM neural network with an FNN (false nearest neighbor) algorithm, which uses the false nearest neighbor method to calculate the sliding window size required for prediction, and substitutes the test data into the trained CNN-LSTM model to iteratively predict the capacity decline trajectory, which in turn yields the RUL value. Liu et al. [
7] developed a data-driven RUL prediction method by implementing the ISSA-LSTM model. They optimized the hyperparameters of the LSTM using an improved sparrow search algorithm (ISSA), addressing the challenge of manually tuning the LSTM parameters and enhancing the algorithm’s capability to escape the local optimum. Wang et al. [
27] used the variational modal decomposition (VMD) algorithm to decouple the measured capacity data, separating the general trend in the capacity data and the high-frequency oscillations, divided the battery data into 70% training set and 30% test set, and designed a TCN-attention based RUL prediction algorithm framework.
In addition, there is an issue that must be considered. The labeling data of many batteries in practical applications are very limited, and traditional supervised learning methods make it difficult to construct accurate RUL prediction models effectively. Transfer learning becomes an effective method to solve this problem by transferring the knowledge of existing models to new domains and achieving good generalization ability even with a small number of samples [
28,
29,
30]. When using the transfer learning method, the source domain contains a large number of batteries rich in labeled data, while the target domain is a battery with scarce labeled data. Fine-tuning (FT) is one of the most commonly used transfer learning methods, and many research efforts have enhanced model generalization by adjusting specific layers within the network [
12,
31,
32]. Lu et al. [
33] used the battery capacity degradation data provided by NASA and the University of Maryland to transfer the NASA battery model to the battery model of the University of Maryland through transfer learning, effectively reducing the number of model training in the target domain, so as to predict the health state of the battery. Tan et al. [
34] proposed a capacity estimation method based on model fine-tuning. The model is based on LSTM combined with a fully connected layer. During the transfer process, the model is fine-tuned with the first 25% data of the new battery to predict the discharge capacity of subsequent cycles. Considering that our study does not have manual feature extraction but is based on the capacity data of batteries, we will also use the transfer method of model fine-tuning.
However, existing studies on lithium battery aging trajectory prediction still have some problems in applicability. In terms of model training, existing methods use small datasets to develop and test models, which limits their generalization and usefulness. In terms of model transfer, most of the existing fine-tuning methods only fine-tune the fully connected layer and do not necessarily work well on every dataset. Moreover, existing studies have not taken into account the different stages of gradual and rapid battery degradation in model development. This limitation makes it inadequate for effective battery management and prompt degradation prediction. To address these shortcomings, we propose a transferable battery capacity degradation prediction framework. A data-driven model is first built and the model parameters are optimized using the Gray Wolf optimization algorithm. During the model transfer phase, specific network layers are fine-tuned to allow source domain models to be easily transferred to the target domain datasets. Finally, the improvement and applicability of the framework are validated by comparing it with other deep learning methods. The main contributions of this paper are as follows.
- (1)
Online prediction of test batteries requires only a small amount of upfront cyclic capacity data to predict the subsequent decline trajectory of the battery, such that the framework is much more flexible and adaptable to real industrial scenarios compared to traditional methods;
- (2)
CNN, LSTM, and the attention mechanism are integrated to model the battery capacity data without manual feature extraction, and the parameters of the model are optimized using the Gray Wolf optimization algorithm during model training;
- (3)
A transfer learning strategy is proposed to achieve accurate prediction of aging trajectories for different datasets by only fine-tuning the attention and fully connected layers of the source–domain trained model for target-domain data. The CEEMDAN algorithm is used for batteries with significant capacity regeneration to mitigate the difficulties that capacity regeneration poses to model predictions;
- (4)
The improvement in the proposed framework and its applicability to different datasets are verified by comparing it with other typical deep learning methods (including CNN, LSTM, CNN-LSTM, and CNN-GRU) on two target domain battery datasets.
2. Data and Methodology
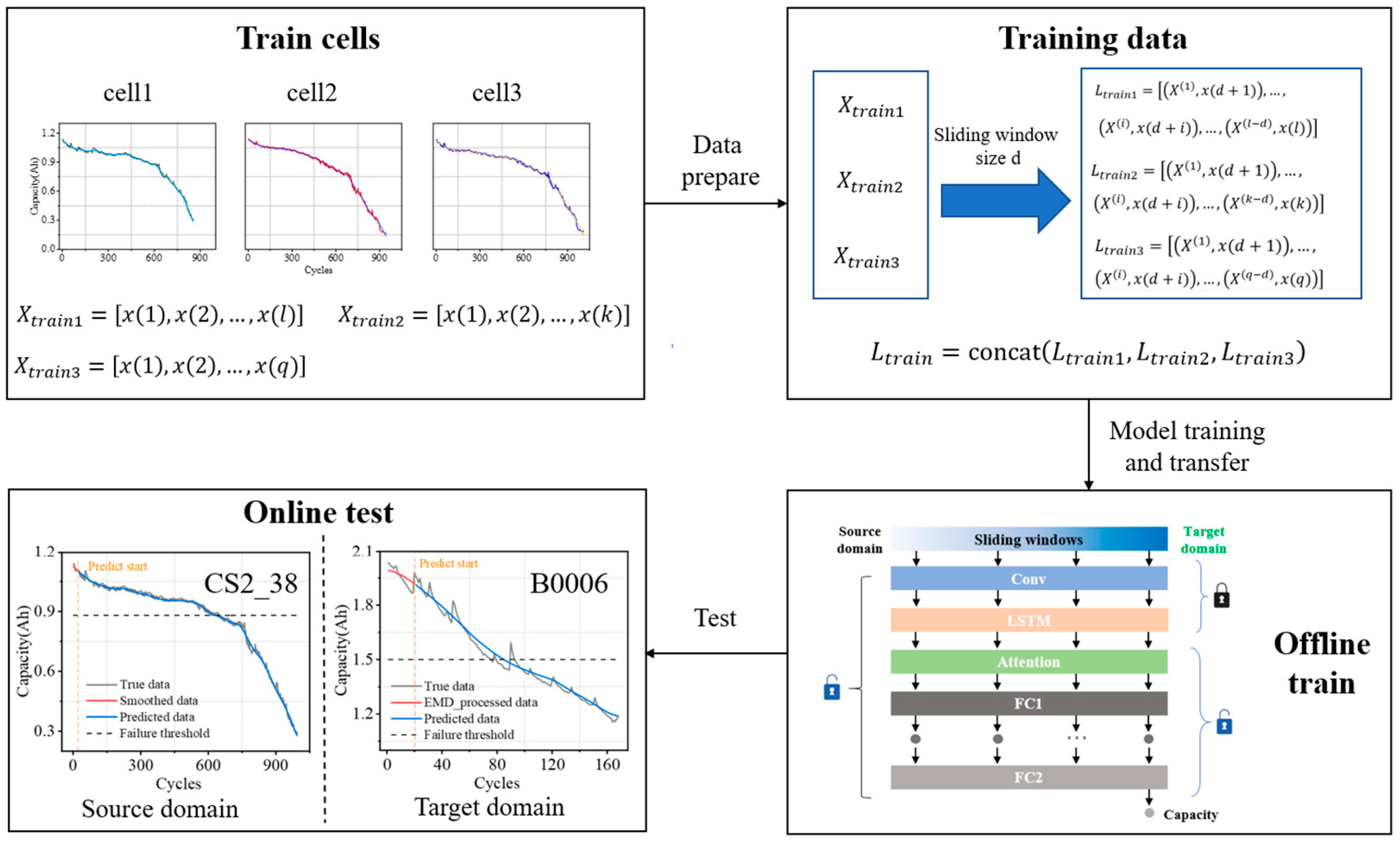
In this paper, a fast and transferable data-driven method is proposed for the prediction of battery aging trajectories under different operating conditions, and the general flow is shown in
Figure 1.
2.1. Data Acquisition
In this paper, we use three different datasets CACLE, NASA, and NCM from the University of Maryland, NASA, and our laboratory [
35,
36].
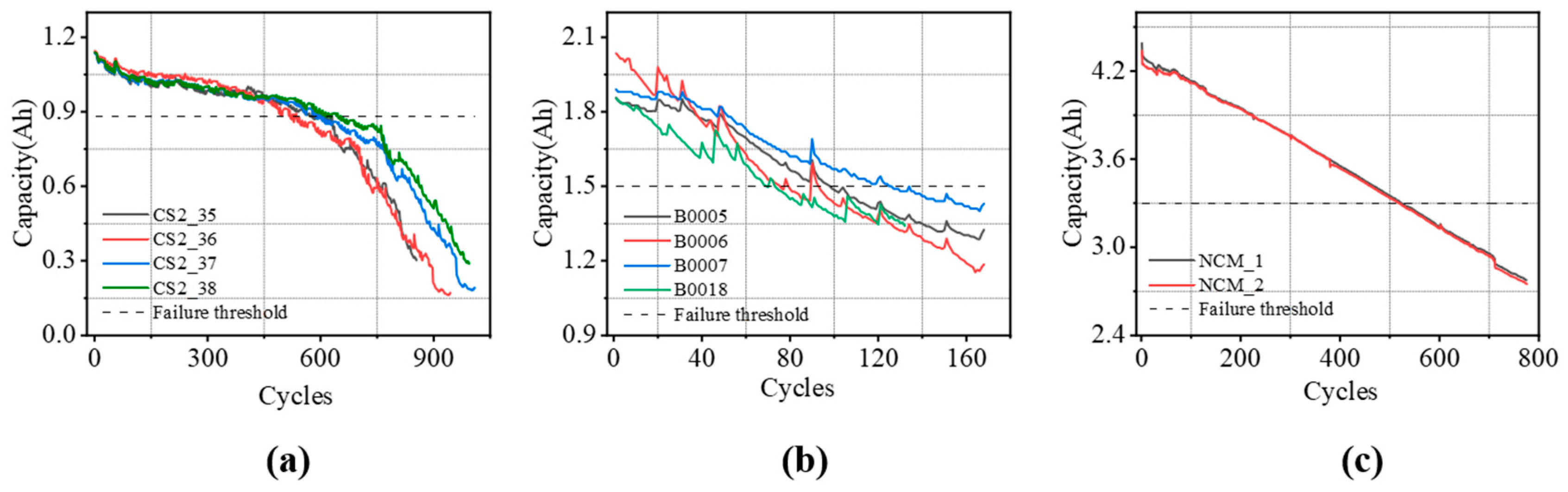
The CALCE datasets were gathered at a stable temperature of 1 °C. During the charging phase, the battery was handled in constant current (CC) mode until its voltage reached 4.2 V, after which the mode was switched to constant voltage (CV). For the discharging phase, the battery operated in CC mode until it reached its discharge capacity, lowering the voltage to below 2.7 V. Detailed information on the CALCE datasets is provided in
Table 1, and
Figure 2a illustrates the capacity variation curves of the CALCE datasets with increasing cycles.
The NASA datasets comprise aging data for four distinct types of lithium-ion batteries, obtained under three operational conditions: charging, discharging, and impedance measurements. The tests for battery charging and discharging were conducted at a constant temperature of 24 °C. During the charging phase, the battery was initially charged in constant current (CC) mode at 1.5 A until the voltage reached 4.2 V, at which point it transitioned to constant voltage (CV) mode. In the discharging process, the battery was discharged in CC mode until it hit a predetermined voltage.
Figure 2b shows the capacity variation curves of NASA batteries as the number of cycles increases.
Table 2 presents detailed information about the NASA battery datasets.
The NCM batteries from our laboratory are designed for use in deep-space environments. We have tested a total of two batteries.
Table 3 provides detailed information on these NCM batteries, and the capacity change curve relative to the number of cycles is shown in
Figure 2c.
2.2. Data Processing
2.2.1. Source Domain Data Processing
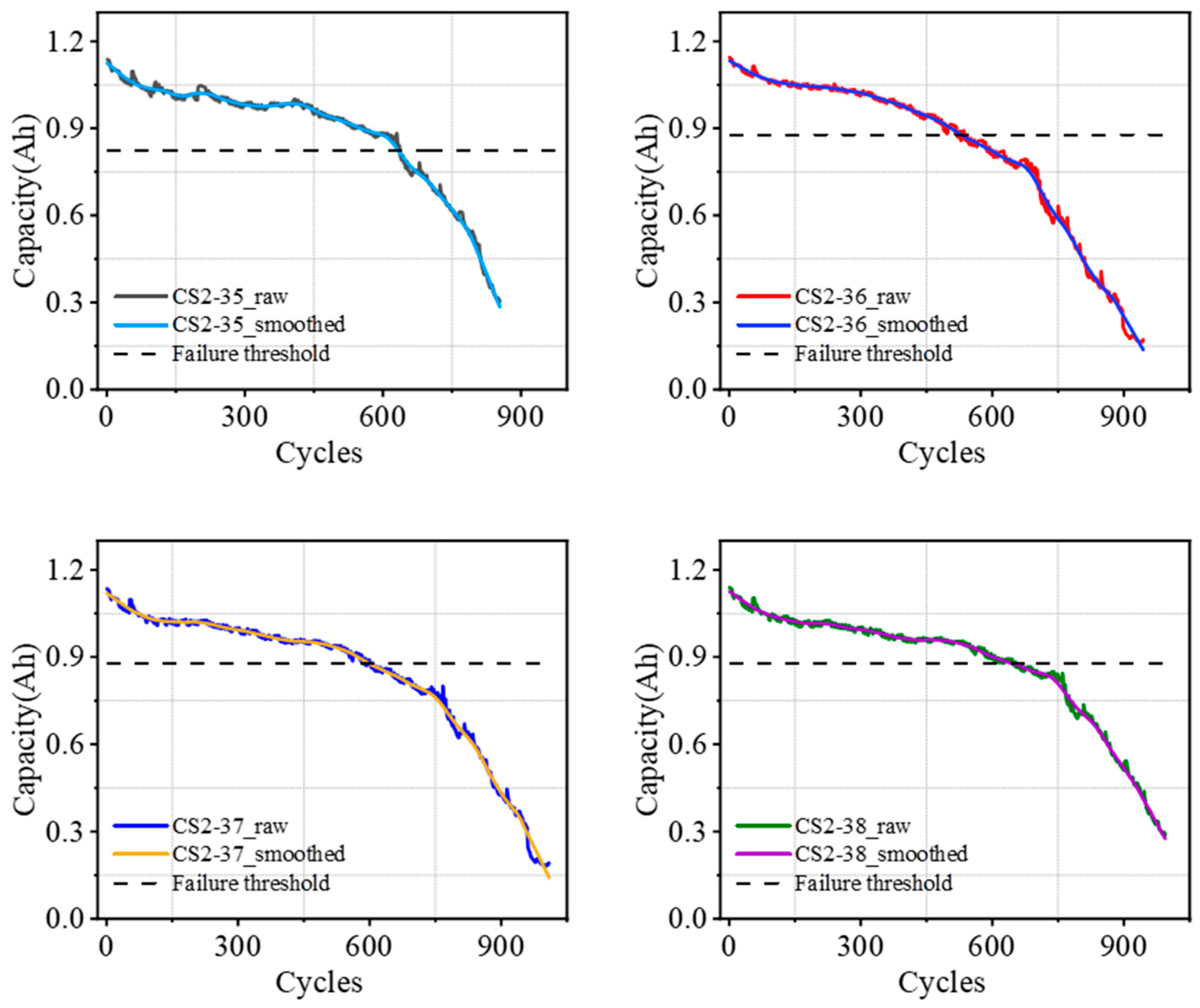
First, the source–domain CALCE battery capacity degradation data are smoothed using the Lowess method to remove some noise present in the original data and obtain a smoother trend line, which helps to better reveal the real trend of battery capacity decline rather than short-term fluctuation [
37,
38]. The smoothed decline curve is shown in
Figure 3. Pearson correlation analysis was used to assess the correlation between the smoothed curves and the original series and the correlation coefficients are given in
Table 4. The results of the correlation analysis show that the Pearson correlation coefficients for each residual exceed 0.97.
2.2.2. Target Domain Data Processing
NASA batteries in the target domain exhibit an obvious capacity regeneration phenomenon. To eliminate the effect of capacity regeneration, it is essential to preprocess the raw capacity data, which is crucial for improving network training efficiency. The Lowess (Locally Weighted Scatterplot Smoothing) method, which uses source domain data, is ineffective in this context. Therefore, we utilize the CEEMDAN (Complete Ensemble Empirical Mode Decomposition with Adaptive Noise) algorithm to achieve this goal. The CEEMDAN algorithm is capable of efficiently removing noise and mitigating the inherent complexity and volatility of the raw capacity data, thus isolating the main trends of battery capacity degradation. Using the B0005 battery as an illustration,
Figure 4a,b shows the RES and IMF curves of the B0005 battery capacity signal obtained through the CEEMDAN algorithm, respectively. The RES component obtained via CEEMDAN processing can fully depict the declining trend of the initial data, exhibiting a more refined pattern than the raw data. This signal-processing method facilitates a more precise examination of battery capacity degradation.
2.2.3. Training Data
After obtaining the smoothed data, the training data are obtained by means of a sliding window. Once the window size d is determined, for a training sample
for
of Train cell
of length
, the input data
can be constructed by Equation (4) and
is the label of the input to the data.
2.3. Aging Trajectory Prediction Framework
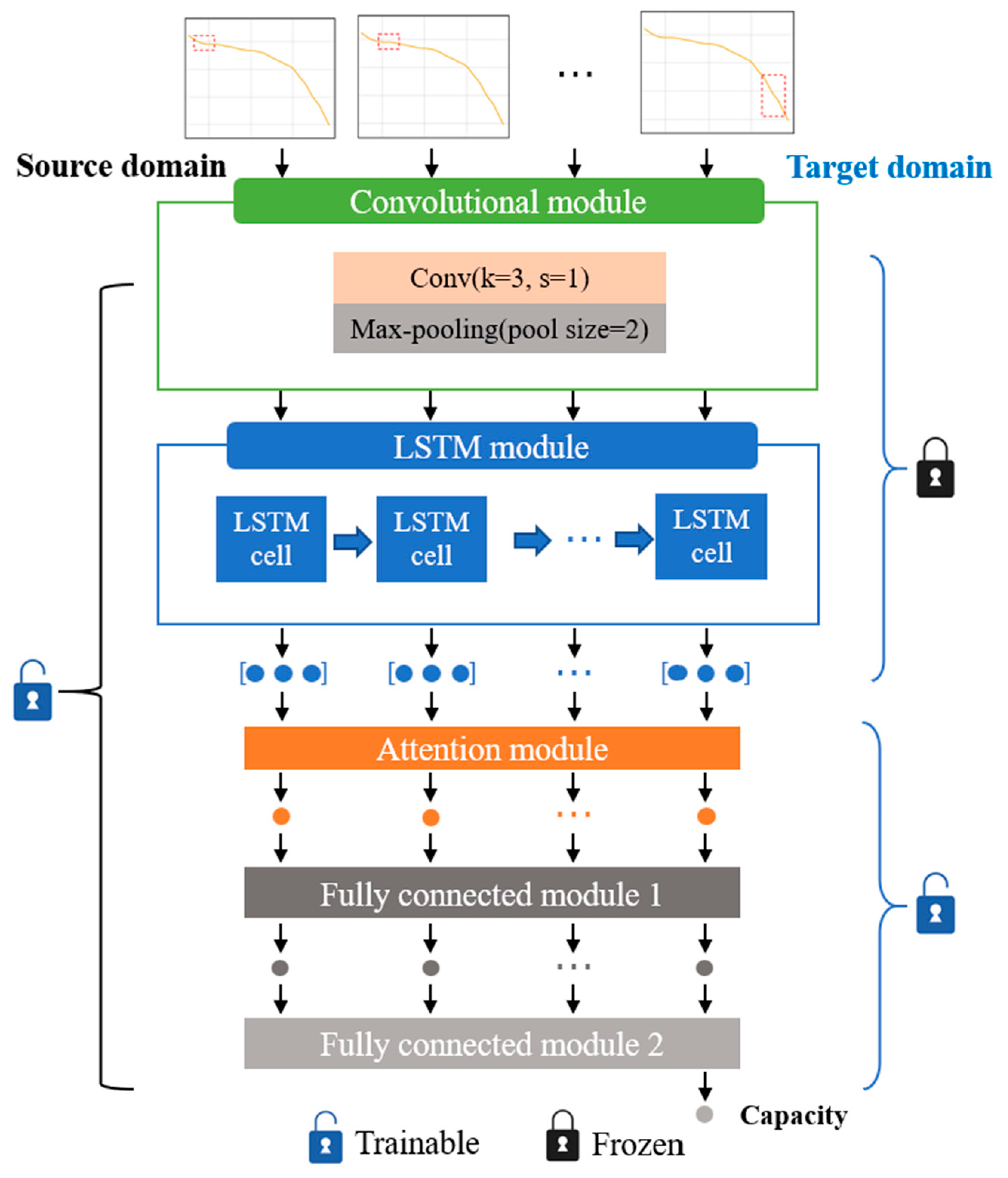
We developed a CNN-LSTM-Attention network model that integrates CNN, LSTM, and Attention mechanisms. This model extracts local features through the convolutional layer, captures sequence dependencies via the LSTM layer, and enhances the representation of key information using the Attention layer. Finally, the model outputs prediction results through fully connected layers. By combining the strengths of convolutional and sequence models and improving the ability to capture global information through the Attention mechanism, this network enhances overall model performance. The network framework is illustrated in
Figure 5, showing that the input data sequentially pass through one CNN layer, one LSTM layer, one customized Attention layer, and two fully connected layers.
2.3.1. Convolutional Neural Network
The input data are first passed through a one-dimensional convolutional layer with the convolutional kernel moving along the time axis, using the ReLU activation function to increase the nonlinear capability of the network and allow the model to learn complex time series patterns, implemented by Equation (5) [
39,
40]. The results obtained are then subjected to a one-dimensional maximum pooling operation, implemented by Equation (6), which allows the model to extract important features from the output of the convolutional layer and reduce the number of model parameters, thus reducing the risk of overfitting and improving computational efficiency [
39].
where
refers to the input vector of the convolutional layer
, which additionally functions as the input layer of the model, i.e., when
equals 1,
denotes the initial input capacity sequence,
denotes the bias parameter,
is convolution kernel’ weight parameter, m denotes the number of filters, the symbol
represents the convolution operation, and
is a further result of pooling
.
After the CNN layer, a fully connected (FC) layer is employed to transform the data information into a format suitable for the LSTM layer’s input. This procedure creates a linkage between the CNN layer and the LSTM layer, enabling the LSTM to capture the spatial features extracted by the CNN.
2.3.2. Long- and Short-Term Memory Network
After extracting features from the convolutional layer, temporal features are extracted using the LSTM layer to learn the temporal dependence of the data. The LSTM has a control flow similar to that of an RNN, which processes the data that pass on information as they propagate forward [
41]. The difference lies in the operation within the LSTM cell. The key design of LSTM is the gating mechanism and the cell state cell. The cell state retains the current LSTM’s state information and transfers it to the next time step. The gating mechanism regulates the flow of information from the cell state. The LSTM layer comprises three gates: the forget gate, the input gate, and the output gate.
- (1)
The forget gate controls the flow of information through the LSTM cells, selectively retaining or discarding information to better capture and utilize long-term dependencies in time series data. The equation is expressed as
where
is the output of the forgetting gate,
is the output state at moment
t − 1,
is the input vector at time t (i.e., the dataspace feature q of the FC layer reshaping),
,
are the weight matrices, and
is the bias.
- (2)
The input gate determines the information being updated, which can be expressed as an input gate containing two parts, the sigmoid layer and the tanh layer. The sigmoid layer acts like the forgetting gate, outputting a value between 0 and 1 to determine which information needs to be updated. The equation is expressed as
where
and
are the weight matrices and
is the bias.
Then, a tanh layer creates a vector of the new candidate state
, and the equation is expressed as
where
and
are the weight matrices of the state candidate vectors and
is the bias.
The output of the input gate is jointly determined by the outputs of the sigmoid and tanh layers. The equation is expressed as
where
is the output value of the forgotten gate and
is the output value of the input gate.
- (3)
The output gate is responsible for computing the output signal . The equation is expressed as
where
and
are the weight matrices of the output gate and
is the bias of the output gate.
passes through a tanh layer and is multiplied with
to obtain the output signal
, i.e., the combination of the output gate
passes the information of the internal state to the external state
, as shown in Equation (12).
is also passed to the attention layer as the input signal for the next moment.
2.3.3. Attention Layer
Incorporating an attention layer into the model enables it to prioritize important elements within the input sequence. This enhancement simplifies the learning process and boosts the model’s overall performance. Only the outputs from preceding layers that are vital for the next stages of the model are chosen. This mechanism allows the network to concentrate selectively on specific pieces of information. Incorporating attention mechanisms into different RNN architectures has improved performance in many tasks, establishing it as an essential component of contemporary RNN frameworks. Models utilizing the attention mechanism have demonstrated strong results when applied to time series data [
42,
43]. To ensure training speed, we simplify the attention module as follows:
- (1)
For each time step
j, compute the attention score
where
is the LSTM output at the time step
j, W is the weight, and
b denotes the bias.
- (2)
Normalize the attention scores by softmax function to obtain the attention weights
where
n is the number of time steps.
- (3)
The output generated by the LSTM is combined with the attention weights through a weighted sum to produce the result of the attention layer, as described by Equation (15). Subsequently, the fully connected layer is used to derive the ultimate output of the CNN-LSTM-Attention model.
2.4. Model Optimization
In the training process of deep neural networks, choosing appropriate hyperparameters (e.g., learning rate, batch size, etc.) is crucial for the accuracy and training efficiency of the model. We decided to use the Gray Wolf Optimization (GWO) algorithm mainly because of its simplicity and powerful global search capability. The GWO algorithm simulates the hunting behavior of gray wolves, and it can be optimized efficiently with a small number of parameter settings. In addition, the GWO algorithm performs well in optimization problems with large search space and complex functions and can effectively avoid falling into local optima. In contrast, Bayesian optimization, despite its advantages in dealing with high-cost objective functions, is not as good as the GWO algorithm in high-dimensional problems because of its complicated agent model construction and high computational complexity, while other optimization algorithms, such as Particle Swarm Optimization (PSO) and Genetic Algorithms (GA), also have certain global search capabilities but often require more parameter adjustments and are prone to fall into local optimization in some cases. Therefore, considering the characteristics of the problem and the optimization requirements, we believe that GWO algorithm is the best choice at present. Specifically, when using the GWO algorithm for hyperparameter optimization, a set of gray wolf groups is first initialized, where each gray wolf represents a set of hyperparameters. Then, the positions of the gray wolves are iteratively updated, and the optimal hyperparameter combination is gradually approximated by evaluating the strengths and weaknesses of each gray wolf based on the fitness function. Eventually, after many iterations of optimization, the gray wolf population converges to an optimal or near-optimal hyperparameter configuration, which significantly improves the performance of the deep neural network. Compared with other optimization algorithms, the optimization process of the gray wolf algorithm is faster. Here, we optimize four hyperparameters, namely, the number of filters in the convolutional layer, the initial learning rate, the L2 regularization coefficient, and the batch size, to determine the hyperparameters to be used for the final model training.
2.5. Specific Layer-Based Transfer Learning
A deep transfer learning strategy is designed to enable real-time personalized predictions of battery aging trajectories by utilizing insights from diverse yet related battery degradation data. Initially, the transfer learning model undergoes retraining with preliminary capacity degradation data from batteries within the target domain and then the retrained model is used to predict subsequent decline trajectories of its batteries. The source domain is the initial training domain for pre-trained models, which usually has a large amount of labeled data and rich features. The target domain is the domain of the transfer learning application, which usually has less data and scarce labeled data. The data distribution, feature space, and task objectives in the source domain can be different from the target domain, but can also have some degree of similarity. Deep transfer learning models are flexible and can be quickly adapted to new operating conditions by dynamically fine-tuning specific network layers [
44]. We adapt to the new battery by tuning the attention layer and fully connected layers of the network. This is shown in
Figure 6.
2.6. Model Evaluation Criteria
To assess the effectiveness of the proposed approach, we employ mean absolute error (MAE), mean absolute percentage error (MAPE), and root mean square error (RMSE) as our evaluation metrics. Lower values of MAE, MAPE, and RMSE indicate the greater accuracy of the proposed method. The calculation formulas are as follows.
where
is the actual capacity data,
is the predicted capacity data, and
n is the number of cycles.
The predicted EOL is obtained when a battery’s capacity falls to the predetermined failure threshold. The error metric (Error Metric, EM) in Equation (19) quantifies the absolute error between the actual EOL and the predicted EOL for each cell; the accuracy metric (AM) detailed in Equation (20) is used as the relative error of the predicted EOL. Since it is not an end-to-end prediction and cannot output RUL directly, we calculate the accuracy of RUL prediction by using these two metrics.
Notably, the developed model was implemented on a computer equipped with AMD (Advanced Micro Devices, Inc., Santa Clara, CA, USA) R7-6800HS CPU, NVIDIA GeForce RTX 3060 GPU, and 16G of RAM using TensorFlow backend for Python 3.9.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}