

A Novel Quick Temperature Prediction Algorithm for Battery Thermal Management Systems Based on a Flat Heat Pipe




Abstract

1. Introduction
2. FHP-Based BTMS Electro-Thermal Coupled Model
2.1. FHP-Based BTMS
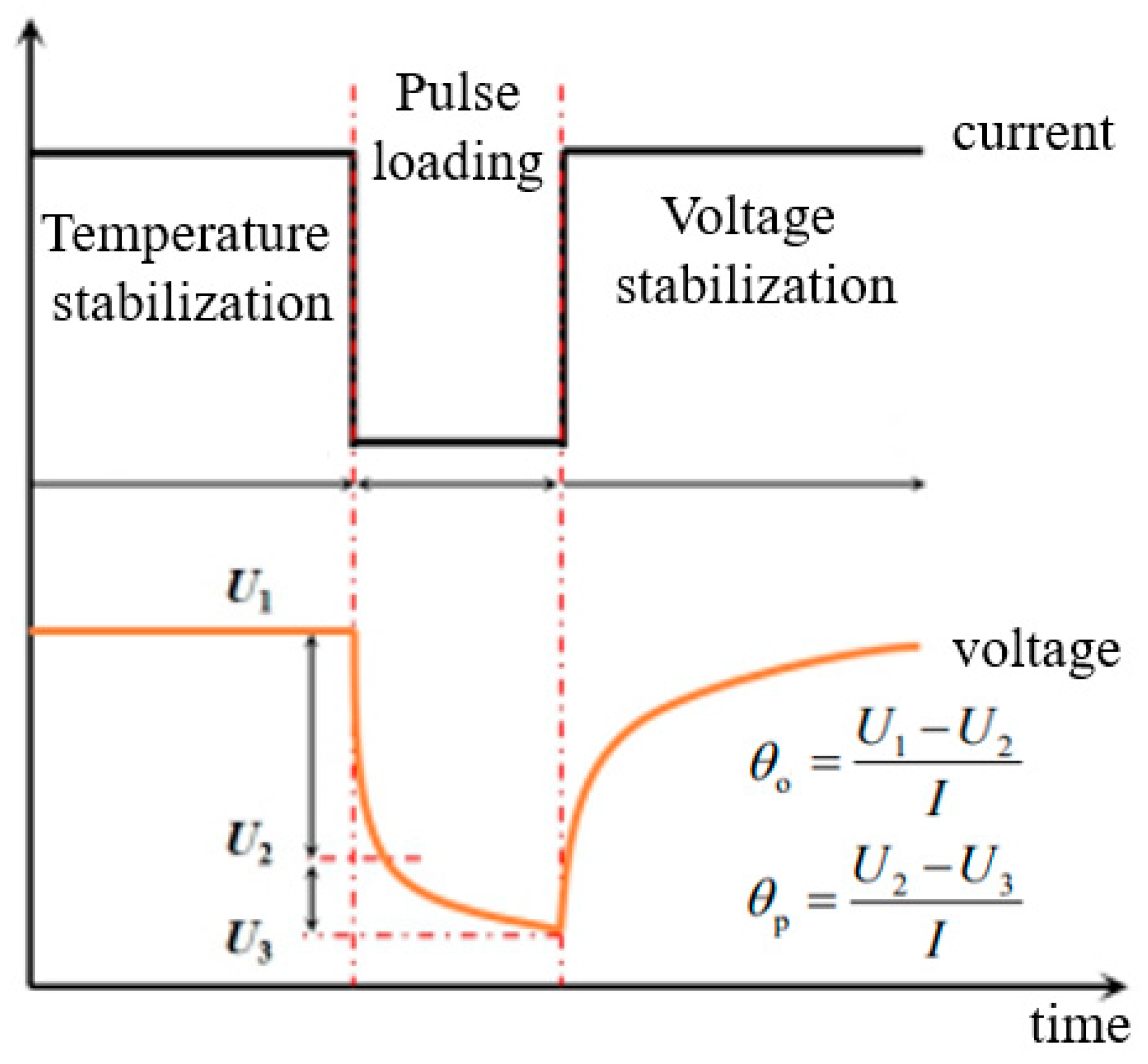
2.2. Battery Heat Generation Model
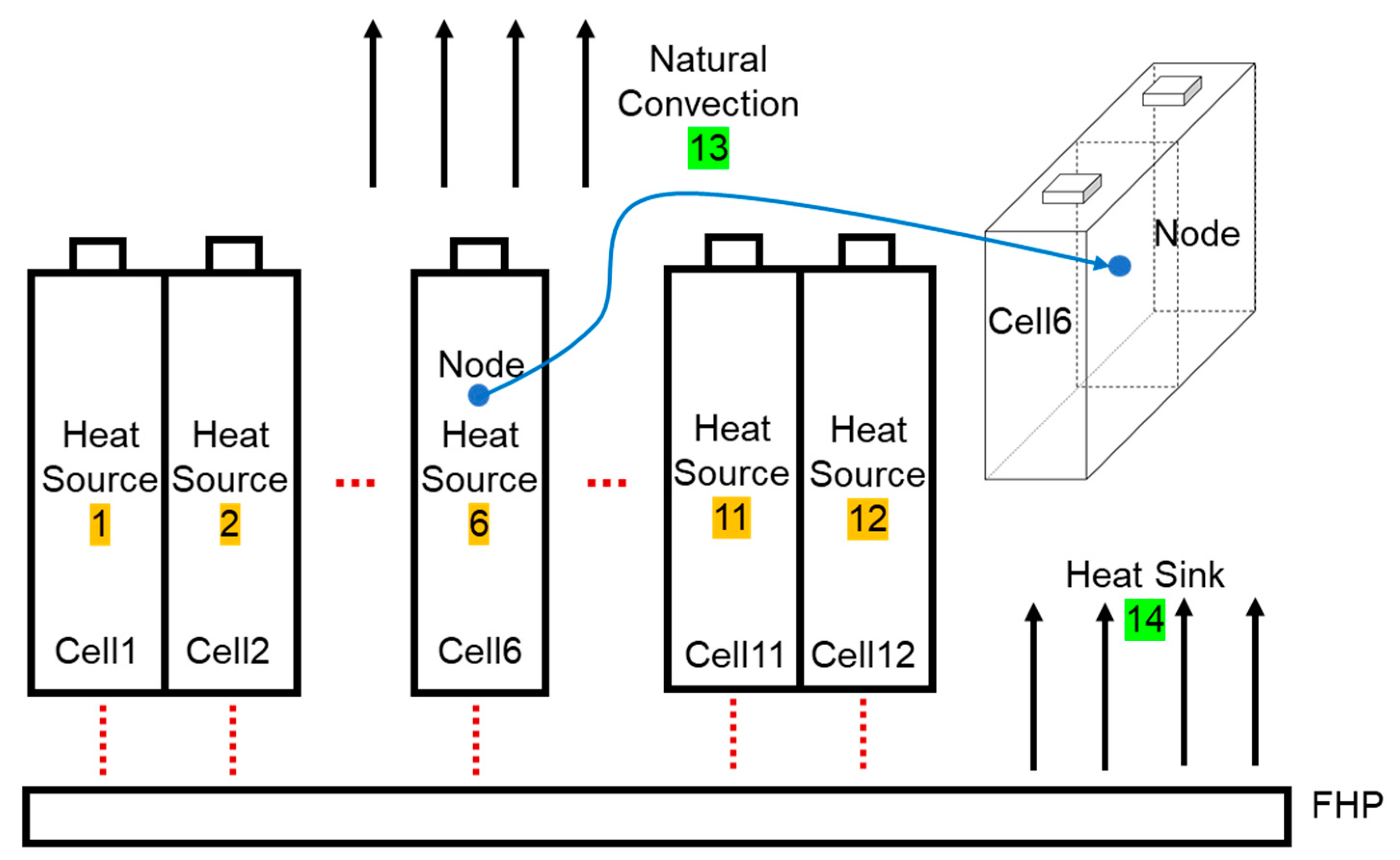
2.3. Dynamic Heat Transfer Model
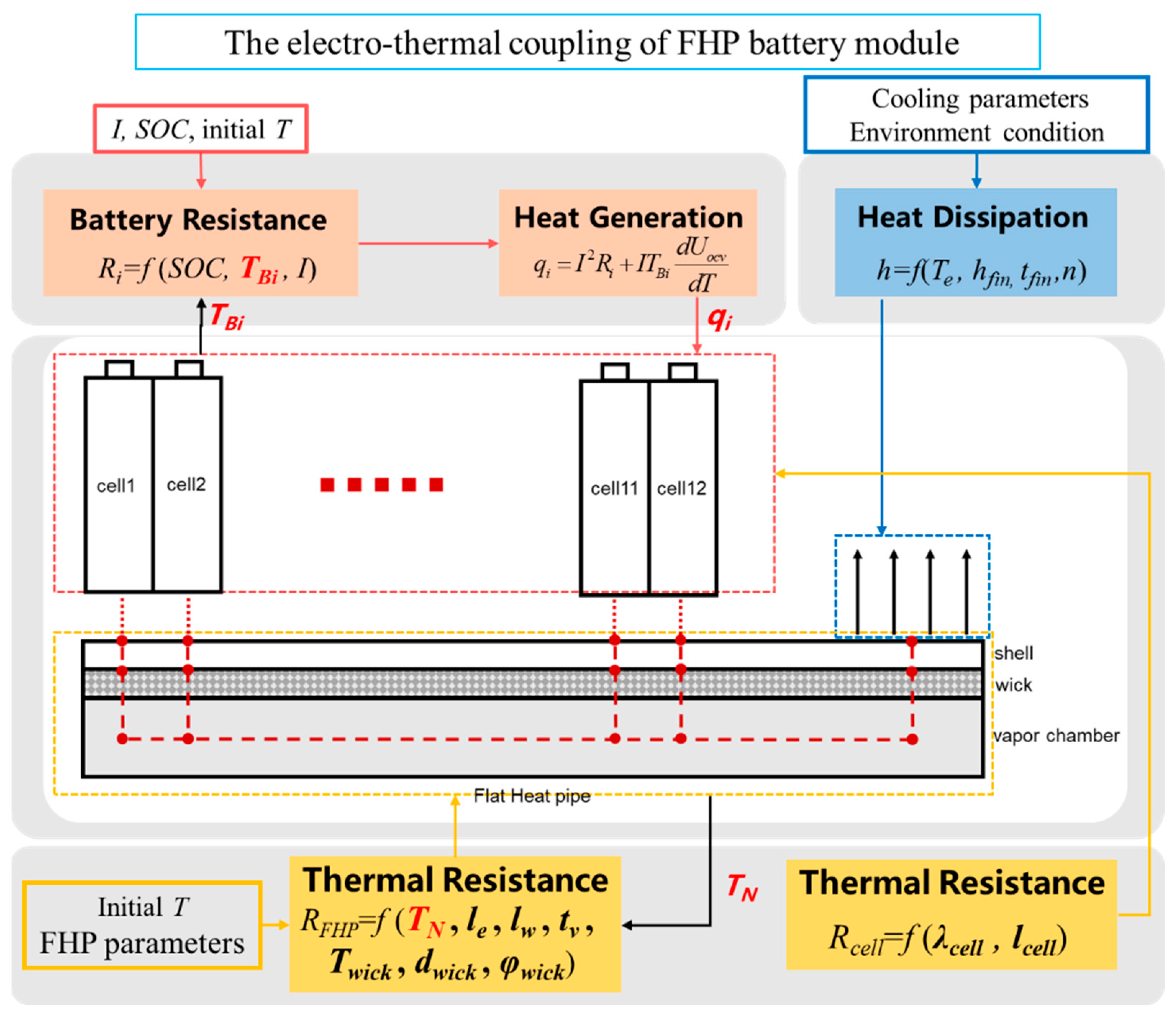
2.4. Electro-Thermal Coupled Modeling Approach
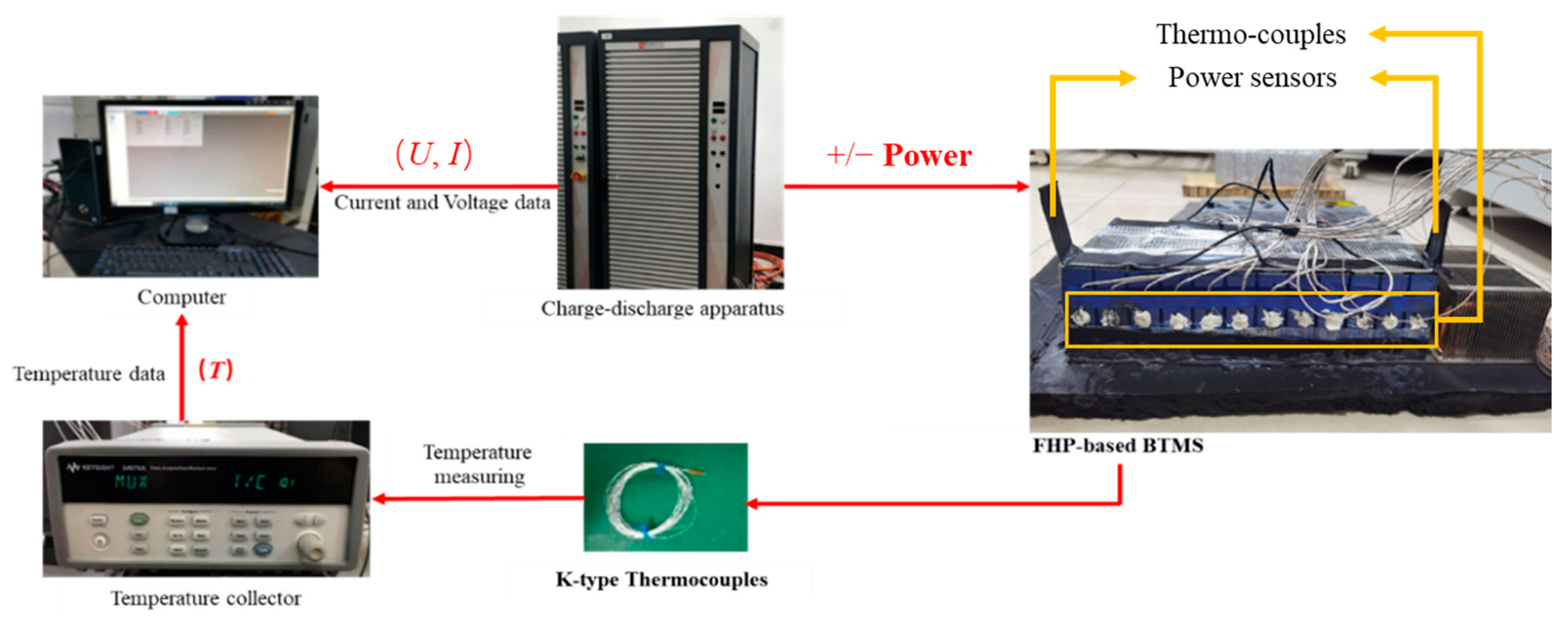
2.5. Verification of FHP-Based BTMS Thermo-Electric Coupled Model
3. Implementation of Thermal Convolution Method
3.1. Temperature Response of a Particular Node inside a Battery Cell to Impulse Excitation
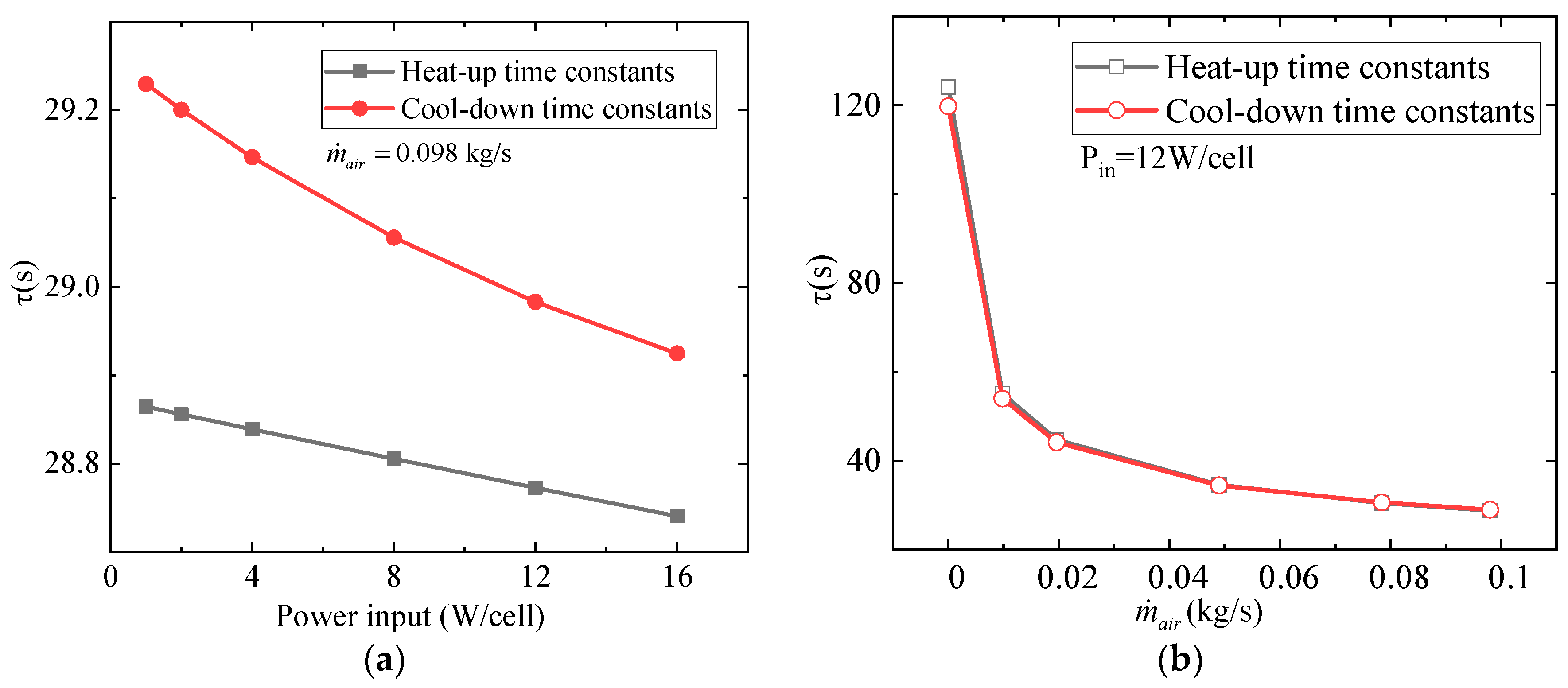
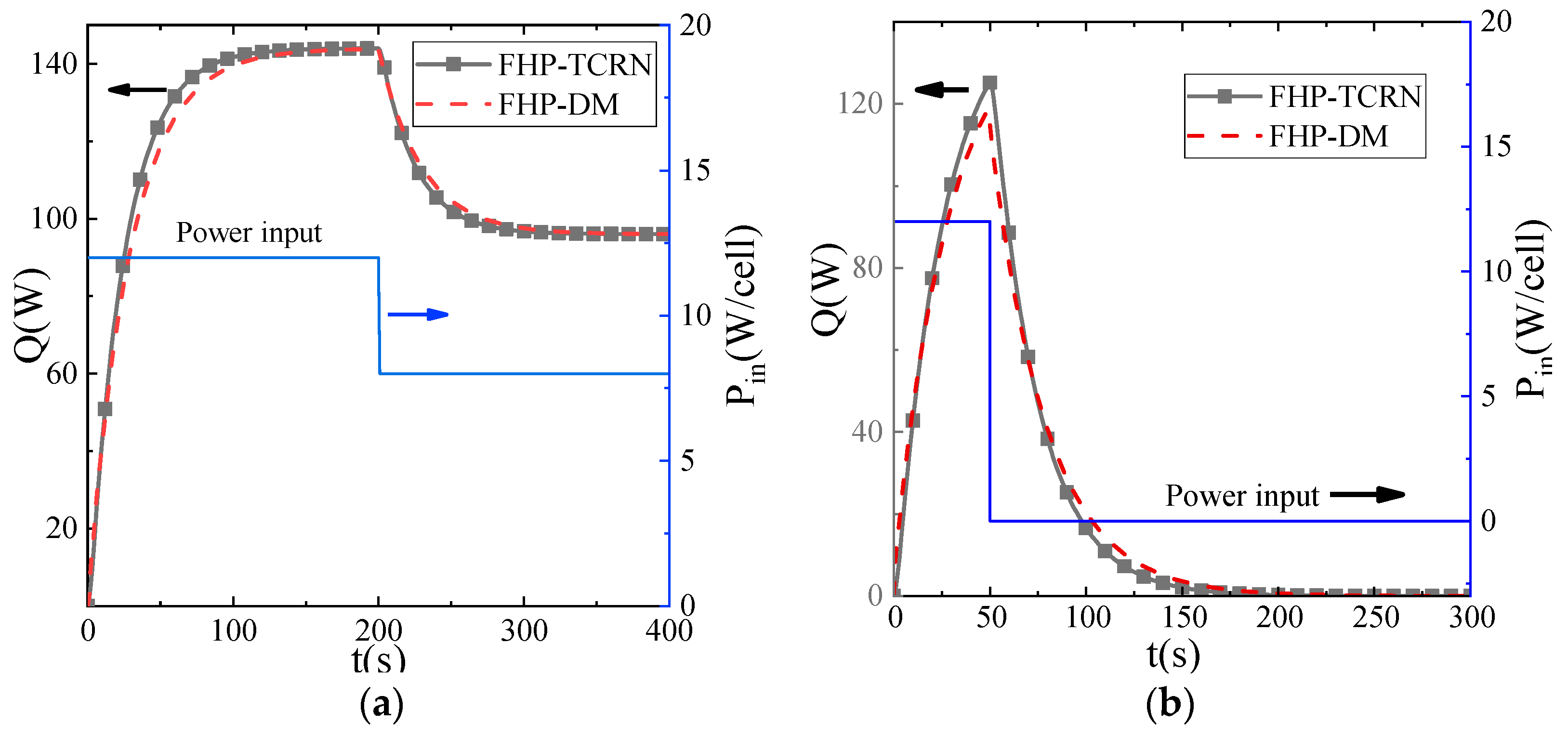
3.2. Correction of the Heat Flux throughout the FHP
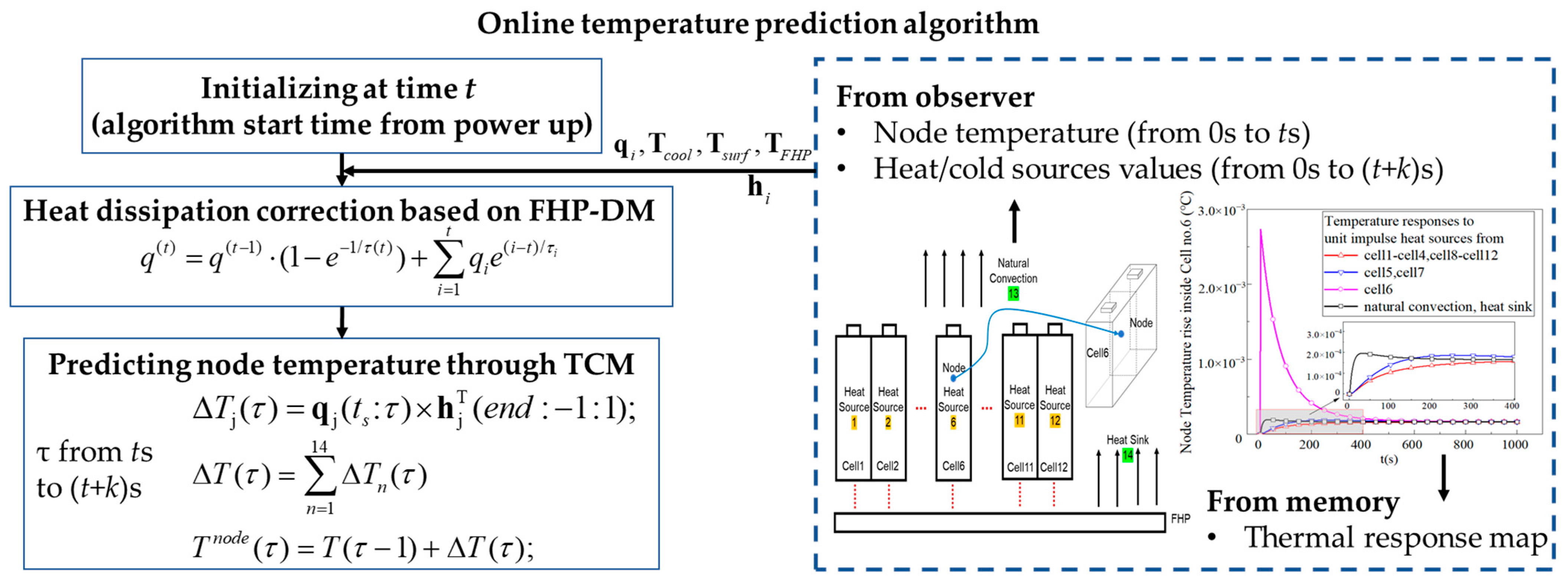
3.3. Implementation Procedure of Online Temperature Prediction Based on the TCM
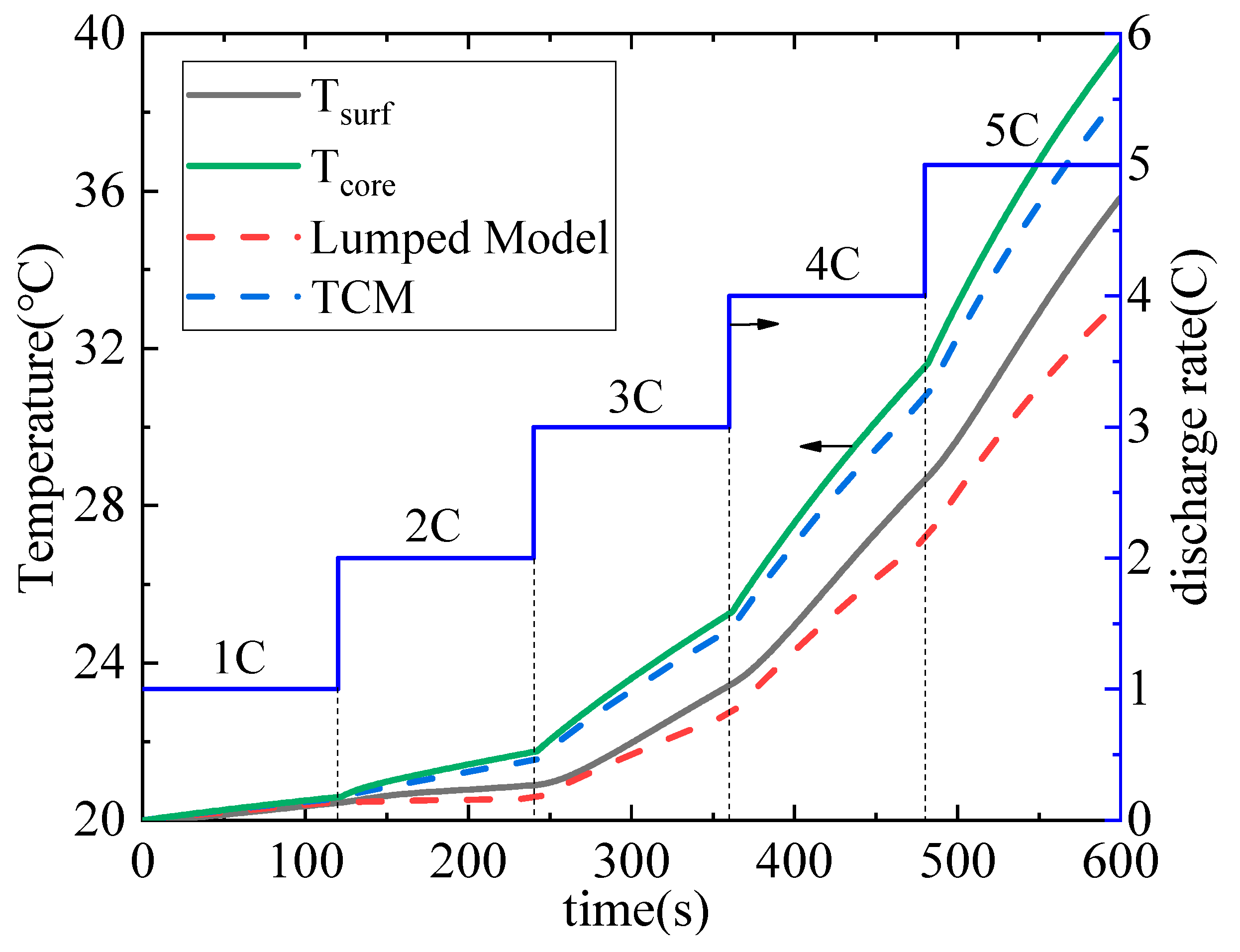
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sharmili, N.; Nagi, R.; Wang, P. A review of research in the Li-ion battery production and reverse supply chains. J. Energy Storage 2023, 68, 107622. [Google Scholar] [CrossRef]
- Zhou, H.; Zhou, F.; Xu, L.; Kong, J.; Yang, Q. Thermal performance of cylindrical Lithium-ion battery thermal management system based on air distribution pipe. Int. J. Heat Mass Transf. 2018, 131, 984–998. [Google Scholar] [CrossRef]
- Das, D.; Manna, S.; Puravankara, S. Electrolytes, Additives and Binders for NMC Cathodes in Li-Ion Batteries—A Review. Batteries 2023, 9, 193. [Google Scholar] [CrossRef]
- Wu, S.; Wang, C.; Luan, W.; Zhang, Y.; Chen, Y.; Chen, H. Thermal runaway behaviors of Li-ion batteries after low temperature aging: Experimental study and predictive modeling. J. Energy Storage 2023, 66, 107451. [Google Scholar] [CrossRef]
- Shahjalal, M.; Shams, T.; Islam, E.; Alam, W.; Modak, M.; Bin Hossain, S.; Ramadesigan, V.; Ahmed, R.; Ahmed, H.; Iqbal, A. A review of thermal management for Li-ion batteries: Prospects, challenges, and issues. J. Energy Storage 2021, 39, 102518. [Google Scholar] [CrossRef]
- Kumar, R.; Goel, V. A study on thermal management system of lithium-ion batteries for electrical vehicles: A critical review. J. Energy Storage 2023, 71, 108025. [Google Scholar] [CrossRef]
- Li, W.; Garg, A.; Xiao, M.; Gao, L. Optimization for Liquid Cooling Cylindrical Battery Thermal Management System Based on Gaussian Process Model. J. Therm. Sci. Eng. Appl. 2021, 13, 1–19. [Google Scholar] [CrossRef]
- He, F.; Ma, L. Thermal management of batteries employing active temperature control and reciprocating cooling flow. Int. J. Heat Mass Transf. 2015, 83, 164–172. [Google Scholar] [CrossRef]
- Behi, H.; Karimi, D.; Behi, M.; Jaguemont, J.; Ghanbarpour, M.; Behnia, M.; Berecibar, M.; Van Mierlo, J. Thermal management analysis using heat pipe in the high current discharging of lithium-ion battery in electric vehicles. J. Energy Storage 2020, 32, 101893. [Google Scholar] [CrossRef]
- Smith, J.; Singh, R.; Hinterberger, M.; Mochizuki, M. Battery thermal management system for electric vehicle using heat pipes. Int. J. Therm. Sci. 2018, 134, 517–529. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, J.; Pan, W. A review of battery thermal management systems about heat pipe and phase change materials. J. Energy Storage 2023, 62, 106827. [Google Scholar] [CrossRef]
- Zhang, Z.; Wei, K. Experimental and numerical study of a passive thermal management system using flat heat pipes for lithium-ion batteries. Appl. Therm. Eng. 2020, 166, 114660. [Google Scholar] [CrossRef]
- Jouhara, H.; Serey, N.; Khordehgah, N.; Bennett, R.; Almahmoud, S.; Lester, S.P. Investigation, development and experimental analyses of a heat pipe based battery thermal management system. Int. J. Thermofluids 2019, 1, 100004. [Google Scholar] [CrossRef]
- Liu, W.; Jia, Z.; Luo, Y.; Xie, W.; Deng, T. Experimental investigation on thermal management of cylindrical Li-ion battery pack based on vapor chamber combined with fin structure. Appl. Therm. Eng. 2020, 162, 114272. [Google Scholar] [CrossRef]
- Mei, N.; Xu, X.; Li, R. Heat Dissipation Analysis on the Liquid Cooling System Coupled with a Flat Heat Pipe of a Lithium-Ion Battery. ACS Omega 2020, 5, 17431–17441. [Google Scholar] [CrossRef]
- Mo, X.; Hu, X.; Tang, J.; Tian, H. A comprehensive investigation on thermal management of large-capacity pouch cell using micro heat pipe array. Int. J. Energy Res. 2019, 43, 7444–7458. [Google Scholar] [CrossRef]
- Gan, Y.; He, L.; Liang, J.; Tan, M.; Xiong, T.; Li, Y. A numerical study on the performance of a thermal management system for a battery pack with cylindrical cells based on heat pipes. Appl. Therm. Eng. 2020, 179, 115740. [Google Scholar] [CrossRef]
- Cen, J.; Jiang, F. Li-ion power battery temperature control by a battery thermal management and vehicle cabin air conditioning integrated system. Energy Sustain. Dev. 2020, 57, 141–148. [Google Scholar] [CrossRef]
- Min, H.; Zhang, Z.; Sun, W.; Min, Z.; Yu, Y.; Wang, B. A thermal management system control strategy for electric vehicles under low-temperature driving conditions considering battery lifetime. Appl. Therm. Eng. 2020, 181, 115944. [Google Scholar] [CrossRef]
- Gao, X.; Ma, Y.; Chen, H. Active Thermal Control of a Battery Pack Under Elevated Temperatures. IFAC PapersOnLine 2018, 51, 262–267. [Google Scholar] [CrossRef]
- Lee, S.-J.; Lee, C.-Y.; Chung, M.-Y.; Chen, Y.-H.; Han, K.-C.; Liu, C.-K.; Yu, W.-C.; Chang, Y.-M. Lithium-ion Battery Module Temperature Monitoring by Using Planer Home-Made Micro Thermocouples. Int. J. Electrochem. Sci. 2013, 8, 4131–4141. [Google Scholar] [CrossRef]
- Sun, J.; Wei, G.; Pei, L.; Lu, R.; Song, K.; Wu, C.; Zhu, C. Online Internal Temperature Estimation for Lithium-Ion Batteries Based on Kalman Filter. Energies 2015, 8, 4400–4415. [Google Scholar] [CrossRef]
- Zhang, C.; Li, K.; Deng, J. Real-time estimation of battery internal temperature based on a simplified thermoelectric model. J. Power Sources 2016, 302, 146–154. [Google Scholar] [CrossRef]
- Kim, Y.; Mohan, S.; Siegel, J.B.; Stefanopoulou, A.G.; Ding, Y. The Estimation of Temperature Distribution in Cylindrical Battery Cells Under Unknown Cooling Conditions. IEEE Trans. Control. Syst. Technol. 2014, 22, 2277–2286. [Google Scholar] [CrossRef]
- Li, W.; Xie, Y.; Hu, X.; Zhang, Y.; Li, H.; Lin, X. An Online SOC-SOTD Joint Estimation Algorithm for Pouch Li-Ion Batteries Based on Spatio-Temporal Coupling Correction Method. IEEE Trans. Power Electron. 2021, 37, 7370–7386. [Google Scholar] [CrossRef]
- Hu, X.; Asgari, S.; Yavuz, I.; Stanton, S.; Hsu, C.-C.; Shi, Z.; Wang, B.; Chu, H.-K. A Transient Reduced Order Model for Battery Thermal Management Based on Singular Value Decomposition. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 3971–3976. [Google Scholar]
- Asgari, S.; Hu, X.; Tsuk, M.; Kaushik, S. Application of POD plus LTI ROM to Battery Thermal Modeling: SISO Case. SAE Int. J. Commer. Veh. 2014, 7, 278–285. [Google Scholar] [CrossRef]
- Kleiner, J.; Stuckenberger, M.; Komsiyska, L.; Endisch, C. Real-time core temperature prediction of prismatic automotive lithium-ion battery cells based on artificial neural networks. J. Energy Storage 2021, 39, 102588. [Google Scholar] [CrossRef]
- Wang, Y.; Xiong, C.; Wang, Y.; Xu, P.; Ju, C.; Shi, J.; Yang, G.; Chu, J. Temperature state prediction for lithium-ion batteries based on improved physics informed neural networks. J. Energy Storage 2023, 73, 108863. [Google Scholar] [CrossRef]
- Al Miaari, A.; Ali, H.M. Batteries temperature prediction and thermal management using machine learning: An overview. Energy Rep. 2023, 10, 2277–2305. [Google Scholar] [CrossRef]
- Zhang, W.; Wan, W.; Wu, W.; Zhang, Z.; Qi, X. Internal temperature prediction model of the cylindrical lithium-ion battery under different cooling modes. Appl. Therm. Eng. 2022, 212, 118562. [Google Scholar] [CrossRef]
- Dan, D.; Li, W.; Zhang, Y.; Xie, Y. A quasi-dynamic model and thermal analysis for vapor chambers with multiple heat sources based on thermal resistance network model. Case Stud. Therm. Eng. 2022, 35, 102110. [Google Scholar] [CrossRef]
- Jiang, Y.; Carbajal, G.; Sobhan, C.B.; Li, J. 3D Heat Transfer Analysis of a Miniature Copper-Water Vapor Chamber with Wicked Pillars Array. ISRN Mech. Eng. 2013, 2013, 194908. [Google Scholar] [CrossRef]
- Patankar, G.; Weibel, J.A.; Garimella, S.V. On the transient thermal response of thin vapor chamber heat spreaders: Optimized design and fluid selection. Int. J. Heat Mass Transf. 2020, 148, 119106. [Google Scholar] [CrossRef]
- Thomas, K.E.; Newman, J. Thermal Modeling of Porous Insertion Electrodes. J. Electrochem. Soc. 2003, 150, A176–A192. [Google Scholar] [CrossRef]
- Singh, R.; Akbarzadeh, A.; Mochizuki, M. Effect of Wick Characteristics on the Thermal Performance of the Miniature Loop Heat Pipe. J. Heat Transf. 2009, 131, 082601. [Google Scholar] [CrossRef]
- Liu, F.; Lan, F.; Chen, J. Dynamic thermal characteristics of heat pipe via segmented thermal resistance model for electric vehicle battery cooling. J. Power Sources 2016, 321, 57–70. [Google Scholar] [CrossRef]
- Bergman, T.L.; Lavine, A.S.; Incropera, F.P.; DeWitt, D.P. Fundamentals of Heat and Mass Transfer; John Wiley & Sons: New York, NY, USA, 2015; Volume 13. [Google Scholar]
- Ranjan, R.; Murthy, J.Y.; Garimella, S.V.; Vadakkan, U. A numerical model for transport in flat heat pipes considering wick microstructure effects. Int. J. Heat Mass Transf. 2011, 54, 153–168. [Google Scholar] [CrossRef]
- Tutuianu, M.; Bonnel, P.; Ciuffo, B.; Haniu, T.; Ichikawa, N.; Marotta, A.; Pavlovic, J.; Steven, H. Development of the World-wide harmonized Light duty Test Cycle (WLTC) and a possible pathway for its introduction in the European legislation. Transp. Res. Part D Transp. Environ. 2015, 40, 61–75. [Google Scholar] [CrossRef]
- El-Genk, M.S.; Lianmin, H. An experimental investigation of the transient response of a water heat pipe. Int. J. Heat Mass Transf. 1993, 36, 3823–3830. [Google Scholar] [CrossRef]
- Chang, W.S.; Colwell, G.T. Mathematical Modeling of The Transient Operating Characteristics of a Low-Temperature Heat Pipe. Numer. Heat Transf. 1985, 8, 169–186. [Google Scholar] [CrossRef]
- Luo, Y.; Qian, Y.; Zeng, Z.; Zhang, Y. Simulation and analysis of operating characteristics of power battery for flying car utilization. eTransportation 2021, 8, 100111. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Dimensions | 148 mm × 26.7 mm × 98 mm |
| Nominal capacity | 50 Ah |
| Energy | 182.5 Wh |
| Nominal voltage | 3.65 V |
| Anode material | NCM |
| Electrolyte material | LiPF6 |
| Cathode material | Graphite |
| Mass | 895 g |
| Parameters | Value |
|---|---|
| Shell Material of FHP | Aluminum |
| Wick Material of FHP | (Porous sintered) Aluminum particles |
| Working Fluid of FHP | Acetone |
| Evaporator length (each cell) | 0.026 m |
| Condenser length of FHP | 0.1 m |
| FHP width | 0.148 m |
| FHP length | 0.44 m |
| Total thickness of FHP | 0.005 m |
| Thickness of shell | 0.001 m |
| Thickness of wick | 0.0015 m |
| Thickness of vapor channel | 0.0015 m |
| Space of fin | 0.01 m |
| Width of fin | 0.08 m |
| Thickness of fin | 0.0005 m |
| Wick porosity | 0.48 |
| Module overall size | 440 mm × 150 mm × 103 mm |
| Cooling method | Axial fan |
| Fan size | 120 mm × 120 mm × 50 mm |
| Max airflow rate | 0.12 kg/m3 |
| Type | Symbol | Expression | |
|---|---|---|---|
| Conduction thermal resistance | Rc | (5) | |
| Rw | |||
| Rs | |||
| Convection thermal resistance | Rec | (6) | |
| Phase change thermal resistance | Rpc | (7) | |
| Vapor flow thermal resistance | Rv | (8) |
| Battery Cell | FHP Shell | FHP Wick | Sources | |
|---|---|---|---|---|
| # Density(kg/m3) | 2.519 × 103 | 2.7 × 103 | 1.520 × 103 | [32,40] |
| # Thermal Capacity(J/kg·K) | 1.023 × 103 | 920.9 | 1.059 × 103 | [32,40] |
| Thermal Conductivity (W·m–1·K–1) | & x axis: 1.096 | 200 | 9.965 | [32,40] |
| & y axis: 22.446 |
| Operating Condition | 0.5 C | 1 C | 1.5 C | WLTC | |||
|---|---|---|---|---|---|---|---|
| Relative RSMEs | Fan off 8.14% | Fan on 8.74% | Fan off 3.10% | Fan on 1.82% | Fan off 2.93% | Fan on 1.98% | 12.38% |
| TCM | Lumped Model | TCRN | |
|---|---|---|---|
| CPU-time | 47 ms | 5 ms | 26.81 s |
| TCM | Lumped Model | ||||
|---|---|---|---|---|---|
| RE | MAE | RE | MAE | ||
| Dynamic current | 1 C | 2.20% | 0.01 °C | 12.70% | 0.07 °C |
| 2 C | 2.20% | 0.06 °C | 12.69% | 0.28 °C | |
| 3 C | 2.19% | 0.12 °C | 12.67% | 0.62 °C | |
| 4 C | 2.18% | 0.21 °C | 12.64% | 1.04 °C | |
| 5 C | 2.18% | 0.31 °C | 12.61% | 1.55 °C | |
| Step | 6.24% | 1.27 °C | 45.06% | 10.39 °C | |
| Dynamic air velocity | 1 C | 26.12% | 0.13 °C | 141.45% | 0.84 °C |
| 2 C | 7.37% | 0.33 °C | 92.29% | 1.50 °C | |
| 3 C | 6.54% | 0.60 °C | 25.02% | 2.32 °C | |
| 4 C | 6.23% | 0.98 °C | 23.39% | 3.46 °C | |
| 5 C | 6.10% | 1.43 °C | 22.64% | 4.80 °C | |
| Dynamic air temperature | 1 C | 34.24% | 0.14 °C | 175.90% | 0.83 °C |
| 2 C | 7.66% | 0.31 °C | 28.04% | 1.37 °C | |
| 3 C | 6.40% | 0.61 °C | 22.56% | 2.19 °C | |
| 4 C | 6.02% | 0.99 °C | 20.82% | 3.23 °C | |
| 5 C | 5.85% | 1.44 °C | 20.02% | 4.46 °C | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Xie, Y.; Li, W.; Wang, Y.; Dan, D.; Qian, Y.; Zhang, Y. A Novel Quick Temperature Prediction Algorithm for Battery Thermal Management Systems Based on a Flat Heat Pipe. Batteries 2024, 10, 19. https://doi.org/10.3390/batteries10010019
Li W, Xie Y, Li W, Wang Y, Dan D, Qian Y, Zhang Y. A Novel Quick Temperature Prediction Algorithm for Battery Thermal Management Systems Based on a Flat Heat Pipe. Batteries. 2024; 10(1):19. https://doi.org/10.3390/batteries10010019
Chicago/Turabian StyleLi, Weifeng, Yi Xie, Wei Li, Yueqi Wang, Dan Dan, Yuping Qian, and Yangjun Zhang. 2024. "A Novel Quick Temperature Prediction Algorithm for Battery Thermal Management Systems Based on a Flat Heat Pipe" Batteries 10, no. 1: 19. https://doi.org/10.3390/batteries10010019
APA StyleLi, W., Xie, Y., Li, W., Wang, Y., Dan, D., Qian, Y., & Zhang, Y. (2024). A Novel Quick Temperature Prediction Algorithm for Battery Thermal Management Systems Based on a Flat Heat Pipe. Batteries, 10(1), 19. https://doi.org/10.3390/batteries10010019