



Recent Research Developments of 4D Printing Technology for Magnetically Controlled Smart Materials: A Review


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Research Status
2.1. Magnetically Controlled Materials
2.1.1. Ferromagnetic Droplets
2.1.2. Magnetic Shape Memory Composite Hydrogel
2.1.3. Magneto–Thermally Deformable Shape Memory Polymers
2.1.4. Magnetic Particle–Driven Composite Elastomers
2.1.5. Magnetic Inorganic Composites
2.1.6. Overview of This Section
3. Magnetically Controlled 4D Printing Process
3.1. Direct Ink Writing Magnetically Control 4D Printing

3.2. Laser–Selected Sintered Magnetically Controlled 4D Printing
3.3. All–Liquid Printing
3.4. Light–Curing Molding Magnetically Controlled 4D Printing

3.5. Reduced Photopolymerization Magnetically Controlled 4D Printing
3.6. Other Magnetically Controlled 4D Printing Processes
4. The Application of 4D Printing for Magnetically Controlled Smart Materials
4.1. Biomedical Applications
4.2. Applications in the Field of Robotics
4.3. Applications in the Field of Intelligent Device Manufacturing
5. Conclusions
- (1)
- There is an urgent need to standardize experimental equipment and develop high–precision printers. The current equipment on printing is all developed by the laboratory itself, which has limited capacity, and there will be a more rapid development with the participation of professional manufacturers in the research.
- (2)
- There is a need to focus on the original innovation of 4D printing materials, encourage more systematic research on original solutions, increase the research on the transformation mechanism of 4D printing materials, explore more optimal design and methods of 4D printing controllable deformation components, and innovate 4D printing processes. There is also a need to develop more highly sensitive materials to improve the dynamic characteristics of the device and to reduce the impact of the required shape, property, or function transformation on the component itself during the printing process.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ma, S.; Jiang, Z.; Wang, M.; Jiang, Z.; Zhang, L.; Liang, Y.; Zhang, Z.; Ren, L.; Ren, L. 4D printing of PLA/PCL shape memory composites with controllable sequential deformation. Bio-Des. Manuf. 2021, 4, 867–878. [Google Scholar] [CrossRef]
- Mao, Y.; Ding, Z.; Yuan, C.; Ai, S.; Michael, L.; Wu, J.; Wang, T.; Qi, H.J. 3D Printed reversible shape changing components with stimuli responsive materials. Sci. Rep. 2016, 6, 24761. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Shaw, B.; Dickey, M.D.; Genzer, J. Sequential self-folding of polymer sheets. Sci. Adv. 2017, 3, e1602417. [Google Scholar] [CrossRef]
- Ding, Z.; Yuan, C.; Peng, X.; Wang, T.; Qi, H.J.; Dunn, M.L. Direct 4D printing via active composite materials. Sci. Adv. 2017, 3, e1602890. [Google Scholar] [CrossRef] [PubMed]
- Wei, H.; Cauchy, X.; Navas, I.O.; Abderrafai, Y.; Chizari, K.; Sundararaj, U.; Liu, Y.; Leng, J.; Therriault, D. Direct 3D printing of hybrid nanofiber-based nanocomposites for highly conductive and shape memory applications. ACS Appl. Mater. Interfaces 2017, 3, 1602417. [Google Scholar] [CrossRef]
- Hu, X.; Ge, Z.; Wang, X.; Jiao, N.; Tung, S.; Liu, L. Multifunctional thermo-magnetically actuated hybrid soft millirobot based on 4D printing. Compos. Part B Eng. 2022, 228, 109451. [Google Scholar] [CrossRef]
- Nadgorny, M.; Xiao, Z.; Chen, C.; Connal, L.A. Three-dimensional printing of pH-responsive and functional polymers on an affordable desktop printer. ACS Appl. Mater. Interfaces 2016, 8, 28946–28954. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, Y.; Huang, H.; Zhu, Y.; Lu, J. Recent advances in shape-memory polymers: Structure, mechanism, functionality, modeling and applications. Prog. Polym. Sci. 2012, 37, 1720–1763. [Google Scholar] [CrossRef]
- Zhao, Q.; Qi, H.J.; Xie, T. Recent progress in shape memory polymer: New behavior, enabling materials, and mechanistic understanding. Prog. Polym. Sci. 2015, 49–50, 79–120. [Google Scholar] [CrossRef]
- Tibbits, S.; Mcknelly, C.; Olguin, C.; Dikovsky, D.; Hirsch, S. 4D printing and universal transformation. In Proceedings of the 34th Annual Conference of the Association-for-Computer-Aided-Design-in-Architecture, Los Angeles, CA, USA, 23–25 October 2014; pp. 539–548. [Google Scholar]
- Sonatkar, J.; Kandasubramanian, B.; Ismail, S. 4D printing: Pragmatic progression in biofabrication. Eur. Polym. J. 2022, 169, 111–128. [Google Scholar] [CrossRef]
- Khan, M.S.; Khan, S.A.; Shabbir, S.; Umar, M.; Mohapatra, S.; Khuroo, T.; Naseef, P.P.; Kuruniyan, M.S.; Lqbal, Z.; Mirza, M.A. Raw materials, technology, healthcare applications, patent repository and clinical trials on 4D printing technology: An updated review. Pharmaceutics 2022, 15, 116. [Google Scholar] [CrossRef] [PubMed]
- Ghosh, A.; Nag, S.; Gomes, A.; Gosavi, A.; Ghule, G.; Kundu, A.; Purohit, B.; Srivastava, R. Applications of smart material sensors and soft electronics in healthcare wearables for better user compliance. Micromachines 2023, 14, 121. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Wang, H.; Tang, J.; Guo, H.; Hong, J. Modeling and design of a soft pneumatic finger for hand rehabilitation. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 2460–2465. [Google Scholar]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Methenitis, G.; Hennes, D.; Lzzo, D.; Visser, A. Novelty search for soft robotic space exploration. In Proceedings of the Genetic and Evolutionary Computation Conference, ACM, Madrid, Spain, 11–15 July 2015; pp. 193–200. [Google Scholar]
- Galloway, K.; Becker, K.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Yang, X.; Chen, Y.; Wainwright, D.K.; Kenaley, C.P.; Gong, Z.; Liu, Z.; Liu, H.; Guan, J.; Wang, T.; et al. A biorobotic adhesive disc for underwater hitchhiking inspired by the remora suckerfish. Sci. Robot. 2017, 2, eaan8072. [Google Scholar] [CrossRef] [PubMed]
- Alshahrani, H. Review of 4D printing materials and reinforced composites: Behaviors, applications, and challenges. J. Sci. Adv. Mater. Devices 2021, 6, 167–185. [Google Scholar] [CrossRef]
- Bai, J.; Bu, G. Progress in 4D printing technology. J. Adv. Manuf. Sci. Technol. 2022, 2, 2022001. [Google Scholar] [CrossRef]
- Liang, X.; Jiang, X.; Gu, J.; Bai, J.; Guan, Z.; Li, Z.; Yan, H.; Zhang, Y.; Esling, C.; Zhao, X.; et al. 5M and 7M martensitic stability and associated physical properties in Ni50Mn35In15 alloy: First-principles calculations and experimental verification. Scr. Mater. 2021, 204, 114140. [Google Scholar] [CrossRef]
- Streubel, R.; Liu, X.; Wu, X.; Russell, T.P. Perspective: Ferromagnetic liquids. Materials 2020, 13, 2712. [Google Scholar] [CrossRef]
- Fan, X.; Jiang, Y.; Li, M.; Zhang, Y.; Tian, C.; Mao, L.; Xie, H.; Sun, L.; Yang, Z.; Sitti, M. Scale-reconfigurable miniature ferrofluidic robots for negotiating sharply variable spaces. Sci. Adv. 2022, 8, eabq1677. [Google Scholar] [CrossRef]
- Liu, X.; Noah, K.; Alejandro, C.; Robert, S.; Jiang, Y.; Chai, Y.; Kim, P.Y.; Joe, F.; Frances, H.; Shi, S. Reconfigurable ferromagnetic liquid droplets. Science 2019, 365, 264–267. [Google Scholar] [CrossRef]
- Korde, J.; Kandasubramanian, B. Naturally biomimicked smart shape memory hydrogels for biomedical functions. Chem. Eng. J. 2020, 379, 122430. [Google Scholar] [CrossRef]
- Gang, F.; Yan, H.; Ma, C.; Jiang, L.; Gu, Y.; Liu, Z.; Zhao, L.; Wang, X.; Zhang, J.; Sun, X. Robust magnetic double-network hydrogels with self-healing, MR imaging, cytocompatibility and 3D printability. Chem. Commun. 2019, 55, 9801–9804. [Google Scholar] [CrossRef] [PubMed]
- Breger, J.C.; Yoon, C.; Xiao, R.; Kwag, H.R.; Wang, M.O.; Fisher, J.P.; Nguyen, T.D.; Gracias, D.H. Self-folding thermo-magnetically responsive soft microgrippers. ACS Appl. Mater. Interfaces 2016, 7, 3398–3405. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Zhao, D.; Liu, B.; Nian, G.; Li, X.; Yin, J.; Qu, S.; Yang, W. 3D printing of multifunctional hydrogels. Adv. Funct. Mater. 2019, 29, 1900971. [Google Scholar] [CrossRef]
- Simińska-Stanny, J.; Nizioł, M.; Szymczyk-Ziółkowska, P.; Brozyna, M.; Adam, J.; Shavandi, A.; Podstawczyk, D. 4D printing of patterned multimaterial magnetic hydrogel actuators. Addit. Manuf. 2021, 49, 102506. [Google Scholar] [CrossRef]
- Tang, J.; Tong, Z.; Xia, Y.; Liu, M.; Lv, Z.; Gao, Y.; Lu, T.; Xie, S.; Pei, Y.; Fang, D.; et al. Super tough magnetic hydrogels for remotely triggered shapemorphing. Mater. Chem. B 2018, 6, 2713–2722. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Wang, L.; Zheng, Z.; Liu, Y.; Leng, J. Magnetic programming of 4D printed shape memory composite structures. Compos. Part A 2019, 125, 105571. [Google Scholar] [CrossRef]
- Wu, H.; Zhang, X.; Ma, Z.; Zhang, C.; Ai, J.; Chen, P.; Yan, C.; Su, B.; Shi, Y. A material combination concept to realize 4D printed products with newly emerging property/functionality. Adv. Sci. 2020, 7, 1903208. [Google Scholar] [CrossRef]
- Paul, D.I.; McGehee, W.; O’Handley, R.C.; Richard, M. Ferromagnetic shape memory alloys: A theoretical approach. J. Appl. Phys. 2007, 101, 123917. [Google Scholar] [CrossRef]
- Caputo, M.P.; Berkowitz, A.E.; Armstrong, A.; Müllner, P.; Solomon, C.V. 4D printing of net shape parts made from Ni-Mn-Ga magnetic shape memory alloys. Addit. Manuf. 2018, 21, 579–588. [Google Scholar] [CrossRef]
- Lin, C. Design and Mechanical Properties of 4D Printed Shape Memory Polymer Tissue Engineering Scaffold. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2022. [Google Scholar]
- Kawashita, M. Ceramic microspheres for biomedical applications. Int. J. Appl. Ceram. Technol. 2005, 2, 173–183. [Google Scholar] [CrossRef]
- Marcus, H.L.; Beaman, J.J.; Barlow, J.W.; Bourell, D. Solid freeform fabrication-powder processing. Am. Ceram. Soc. Bull. 1990, 69, 1030–1031. [Google Scholar]
- Sachs, E.; Cima, M.; Williams, P.; Brancazio, J.; Cornie, J. Three-dimensional printing: Rapid tooling and prototypes directly from a CAD model. CIRP Ann.-Manuf. Technol. 1990, 39, 201–204. [Google Scholar] [CrossRef]
- He, B.; Yang, J.; Zhou, M. Development of bioceramics as heat seeds and drug carriers at the same time. Glass Enamel 2007, 35, 15–18. [Google Scholar]
- Martin, J.J.; Fiore, B.E.; Erb, R.M. Designing bioinspired composite reinforcement architectures via 3D magnetic printing. Nat. Commun. 2015, 6, 8641. [Google Scholar] [CrossRef]
- Pegna, J. Exploratory investigation of solid freeform construction. Autom. Constr. 1997, 5, 427–437. [Google Scholar] [CrossRef]
- Muthukrishnan, S.; Ramakrishnan, S.; Sanjayan, J. Technologies for improving buildability in 3D concrete printing. Cem. Concr. Compos. 2021, 122, 104144. [Google Scholar] [CrossRef]
- Jin, X. Preparation of Magnetically Oriented Steel Fiber Reinforced Cementitious Composites Based on 3D Printing and Study on Mechanical Properties of Beams. Master’s Thesis, Beijing University of Technology, Beijing, China, 2019. [Google Scholar] [CrossRef]
- Lee, Y.A.; An, J.; Chua, K.C. Two-way 4D printing: A review on the reversibility of 3D-printed shape memory materials. Engineering 2017, 3, 663–674. [Google Scholar] [CrossRef]
- Sossou, G.; Demoly, F.; Belkebir, H.; Qi, H.J.; Gomes, S.; Montavon, G. Design for 4D printing: Modeling and computation of smart materials distributions. Mater. Des. 2019, 181, 108074. [Google Scholar] [CrossRef]
- Yoonho, K. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018, 7709, 274–279. [Google Scholar]
- Zhu, P.; Yang, W.; Wang, R.; Gao, S.; Li, B.; Li, Q. 4D printing of complex structures with a fast response time to magnetic stimulus. ACS Appl. Mater. Interfaces 2018, 10, 36435–36442. [Google Scholar] [CrossRef]
- Podstawczyk, D.; Nizio, M.; Szymczyk, P.; Wiśniewski, P. 3D printed stimuli-responsive magnetic nanoparticle embedded alginate-methylcellulose hydrogel actuators. Addit. Manuf. 2020, 34, 101275. [Google Scholar] [CrossRef]
- Wu, S.; Hamel, C.; Ze, Q.; Yang, F.; Qi, H.J.; Zhao, R. Evolutionary algorithm-guided voxel-encoding printing of functional hard-magnetic soft active materials. Adv. Intell. Syst. 2020, 2, 2000060. [Google Scholar] [CrossRef]
- Mei, S.; Wang, J.; Li, Z.; Ding, B.; Li, S.; Chen, X.; Zhao, W.; Zhang, Y.; Zhang, X.; Cui, Z.; et al. 4D printing of polyamide 1212 based shape memory thermoplastic polyamide elastomers by selective laser sintering. J. Manuf. Process. 2023, 92, 157–164. [Google Scholar] [CrossRef]
- Yuan, S.; Zheng, Y.; Chua, K.C.; Yan, Q.; Zhou, K. Electrical and thermal conductivities of MWCNT/polymer composites fabricated by selective laser sintering. Compos. Part A Appl. Sci. Manuf. 2018, 105, 203–213. [Google Scholar] [CrossRef]
- Tan, L.J.; Zhu, W.; Zhou, K. Recent progress on polymer materials for additive manufacturing. Adv. Funct. Mater. 2020, 30, 2003062. [Google Scholar] [CrossRef]
- Deng, H.; Sattari, K.; Xie, Y.; Liao, P.; Yan, Z.; Lin, J. Laser reprogramming magnetic anisotropy in soft composites for reconfigurable 3D shaping. Nat. Commun. 2020, 11, 6325. [Google Scholar] [CrossRef]
- Wu, H.; Wang, O.; Tian, Y.; Wang, M.; Su, B.; Yan, C.; Zhou, K.; Shi, Y. Selective laser sintering-based 4D printing of magnetism-responsive grippers. ACS Appl. Mater. Interfaces 2020, 13, 12679–12688. [Google Scholar] [CrossRef]
- Forth, J.; Liu, X.; Hasnain, J.; Toor, A.; Miszta, K.; Shi, S.; Geissler, P.; Emrick, T.; Helms, B.A.; Russell, T.P. Reconfigurable printed liquids. Adv. Mater. 2018, 30, 1707603. [Google Scholar] [CrossRef]
- Siddharth, J.; Krishna, R.; Karunakarnran, C.; Vasudevan, R.; Arun, T.M.; Krzysztof, K.; Vijay, K.T.; Balan, A.S.S. 4D printing of materials for the future: Opportunities and challenges. Appl. Mater. Today 2020, 18, 100490. [Google Scholar]
- Ge, L.; Dong, L.; Wang, D.; Ge, Q.; Gu, G. A digital light processing 3D printer for fast and high-precision fabrication of soft pneumatic actuators. Sens. Actuators A Phys. 2018, 273, 285–292. [Google Scholar] [CrossRef]
- Hodaei, A.; Akhlaghi, O.; Khani, N.; Aytas, T.; Sezer, D.; Tatli, B.; Menceloglu, Y.Z.; Koc, B.; Akbulut, O. Supporting information-single additive enables 3D printing of highly-loaded iron oxide suspensions. ACS Appl. Mater. Interfaces 2018, 10, 9873–9881. [Google Scholar] [CrossRef] [PubMed]
- Yang, G.; Sun, Y.; Qin, L.; Li, M.; Ou, K.; Fang, J.; Fu, Q. Direct-ink-writing (DIW) 3D printing functional composite materials based on supra-molecular interaction. Compos. Sci. Technol. 2021, 215, 109013. [Google Scholar] [CrossRef]
- Yang, G.; Guan, R.; Zhen, H. Tunable size of hierarchically porous alumina ceramics based on DIW 3D printing supramolecular gel. ACS Appl. Mater. Interfaces 2022, 14, 10998–11005. [Google Scholar] [CrossRef] [PubMed]
- Frascella, F.; Gonzalez, G.; Bosch, P.; Angelini, A. 3D printed photoluminescent polymeric waveguides. ACS Appl. Mater. Interfaces 2018, 10, 39319–39326. [Google Scholar] [CrossRef]
- Geng, J. A volumetric 3D display based on a DLP projection engine. Displays 2013, 34, 39–48. [Google Scholar] [CrossRef]
- He, X.; Yang, F.; Liu, C.; Dai, M. A dual-frequency fringe projection three-dimensional shape measurement system using a DLP 3D projector. Opt. Commun. 2017, 382, 294–301. [Google Scholar]
- Lantean, S.; Barrera, G.; Pirri, C.F.; Tiberto, P.; Sangermano, M.; Roppolo, I.; Rizza, G. 3D printing of magnetoresponsive polymeric materials with tunable mechanical and magnetic properties by digital light processing. Adv. Mater. Technol. 2019, 4, 1900505. [Google Scholar] [CrossRef]
- Ma, C.; Wu, S.; Ze, Q.; Kuang, X.; Zhang, R.; Qi, H.J.; Zhao, R. Magnetic multimaterial printing for multimodal shape transformation with tunable properties and shiftable mechanical behaviors. ACS Appl. Mater. Interfaces 2021, 13, 12639–12648. [Google Scholar] [CrossRef]
- Zhou, A.; Xu, C.; Kanitthamniyom, P.; Ng, C.S.X.; Lim, G.J.; Lew, W.S.; Vasoo, S.; Zhang, X.; Lum, G.Z.; Zhang, Y. Magnetic soft millirobots 3D printed by circulating vat photopolymerization to manipulate droplets containing hazardous agents for in vitro diagnostics. Adv. Mater. 2022, 34, 202200061. [Google Scholar] [CrossRef]
- Blumenschein, L.H.; Gan, L.T.; Fan, J.A.; Okamura, A.M.; Hawkes, E.W. A tip-extending soft robot enables reconfigurable and deployable antennas. IEEE Robot. Autom. Lett. 2018, 3, 949–956. [Google Scholar] [CrossRef]
- Joyee, E.B.; Pan, Y. A fully three-dimensional printed inchworm-inspired soft robot with magnetic actuation. Soft Robot. 2019, 6, 333–345. [Google Scholar] [CrossRef]
- Aydemir, G.; Varol, R.; Tarar, C.; Omeroglu, S.; Ustomar, E.O.; Gul, B.E.; Uvet, H. A new method for creating a wound model with micro-robot in microfluidic device. In Proceedings of the 2020 International Conference on Manipulation, Automation and Robotics at Small Scales, Toronto, ON, Canada, 13–17 July 2020; p. 9307868. [Google Scholar]
- Ceylan, H.; Dogan, O.N.; Yasa, I.C.; Musaoglu, M.N.; Kulali, Z.U.; Sitti, M. 3D printed personalized magnetic micromachines from patient blood–derived biomaterials. Sci. Adv. 2021, 7, eabh0273. [Google Scholar] [CrossRef] [PubMed]
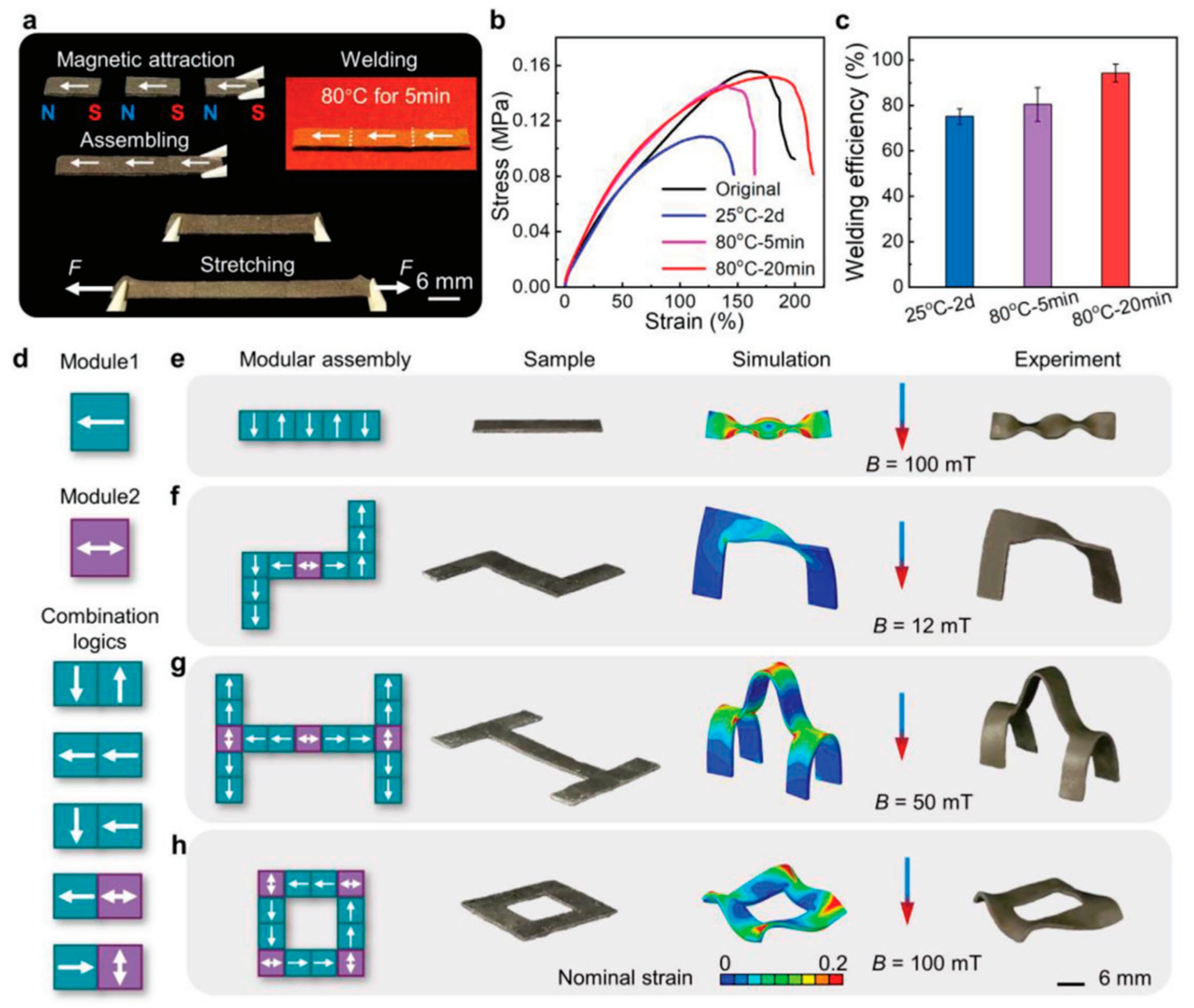
- Kuang, X.; Wu, S.; Ze, Q.; Yue, L.; Jin, Y.; Montgomery, S.M.; Yang, F.; Qi, H.J.; Zhao, R. Magnetic dynamic polymers for modular assembling and reconfigurable morphing architectures. Adv. Mater. 2020, 33, 2102113. [Google Scholar] [CrossRef] [PubMed]
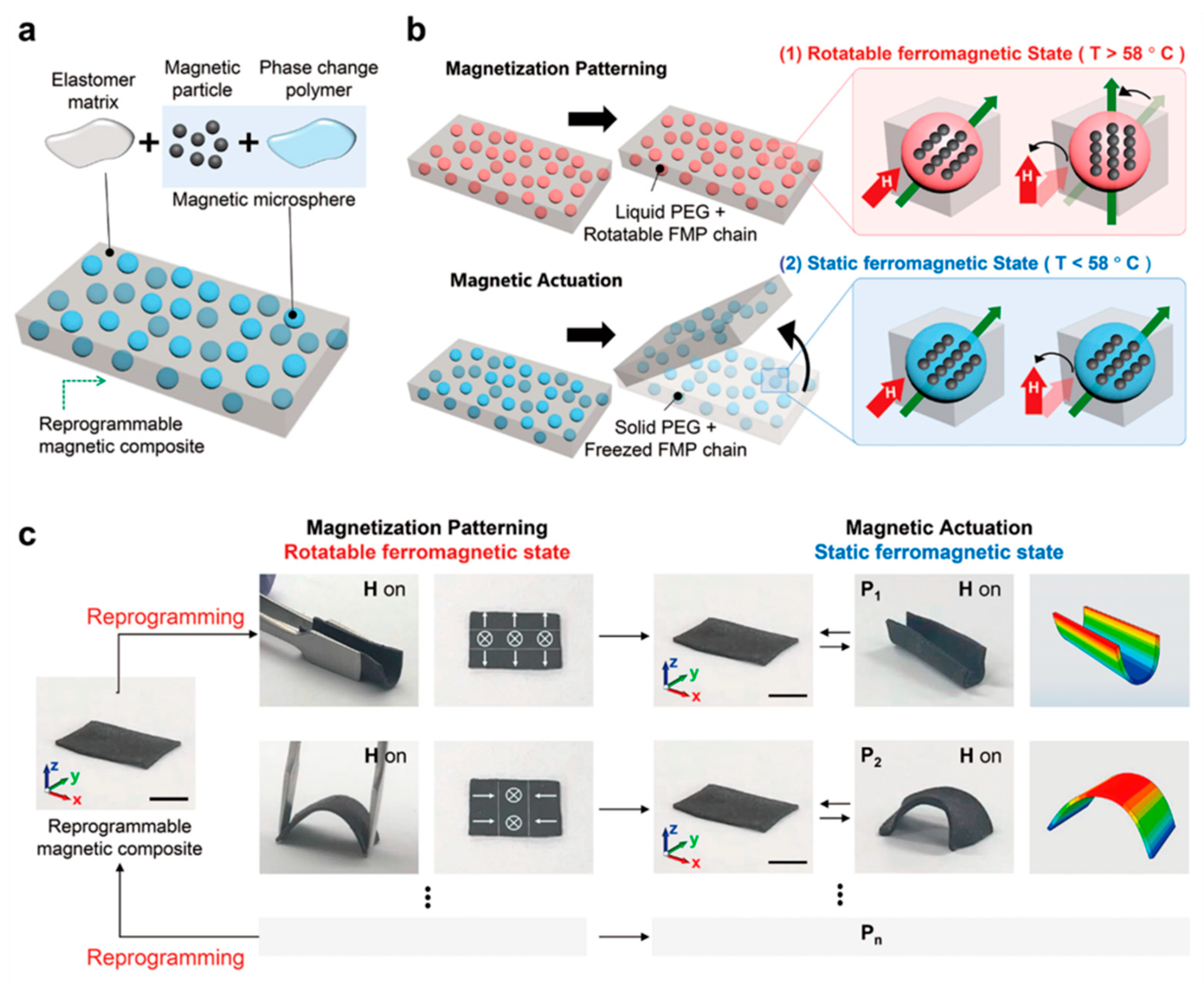
- Song, H.; Lee, H.; Lee, J.; Choe, J.K.; Lee, S.; Yi, J.Y.; Park, S.; Yoo, J.W.; Kwon, M.S.; Kim, J. Reprogrammable ferromagnetic domains for reconfigurable soft magnetic actuators. Adv. Mater. Nano Lett. 2020, 20, 2–37. [Google Scholar] [CrossRef] [PubMed]
- Chang, B.; Sha, X.; Guo, J.; Jiao, Y.; Wang, C.; Yang, W. Thermo and pH dual responsive, polymer shell coated, magnetic mesoporous silica nanoparticles for controlled drug release. J. Mater. Chem. 2011, 21, 9239–9247. [Google Scholar] [CrossRef]
- Peters, C.; Hoop, M.; Pané, S.; Nelson, B.J.; Hierold, C. Degradable magnetic composites for minimally invasive interventions: Device fabrication, targeted drug delivery, and cytotoxicity tests. Adv. Mater. 2016, 28, 533–538. [Google Scholar] [CrossRef]
- Casolaro, M.; Casolaro, I. Pulsed release of antidepressants from nanocomposite hydrogels. Biol. Eng. Med. 2017, 3, 1000132. [Google Scholar] [CrossRef]
- Deb, D.S.; Keya, G.; Jin, H.; Aayushi, R.; Md, M.; KiTaek, L. A 3D bioprinted nanoengineered hydrogel with photo-activated drug delivery for tumor apoptosis and simultaneous bone regeneration via macrophage immunomodulation. Macromol. Biosci. 2023. [Google Scholar] [CrossRef]
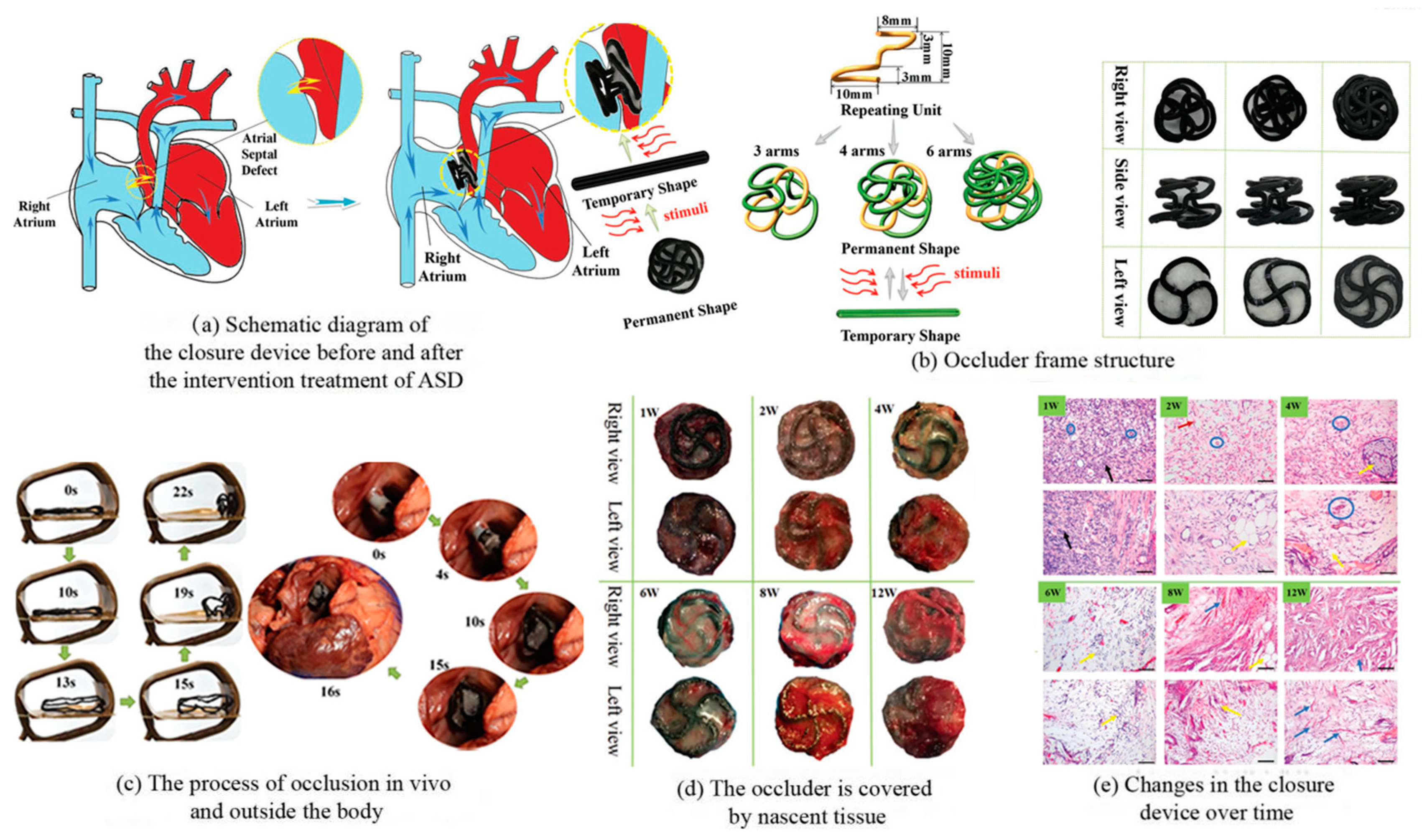
- Lin, C.; Lv, J.; Li, Y.; Zhang, F.; Li, J.; Liu, Y.; Liu, L.; Leng, J. 4D-printed biodegradable and remotely controllable shape memory occlusion devices. Adv. Funct. Mater. 2019, 29, 1906569. [Google Scholar] [CrossRef]
- Xu, F.; Wu, C.M.; Rengarajan, V.; Finley, T.D.; Keles, H.O.; Sung, Y.; Li, B.; Gurkan, U.A.; Demirci, U. Three-dimensional magnetic assembly of microscale hydrogels. Adv. Mater. 2011, 23, 4254–4260. [Google Scholar] [CrossRef] [PubMed]
- Panseri, S.; Russo, A.; Giavaresi, G.; Sartori, M.; Veronesi, F.; Fini, M.; Salter, D.M.; Ortolani, A.; Strazzari, A.; Visani, A.; et al. Innovative magnetic scaffolds for orthopedic tissue engineering. J. Biomed. Mater. Res. Part A 2012, 100A, 2278–2286. [Google Scholar] [CrossRef]
- Kokkinis, D.; Schaffner, M.; Studart, A.R. Multimaterial magnetically assisted 3D printing of composite materials. Natl. Commun. 2015, 6, 8643. [Google Scholar] [CrossRef] [PubMed]
- Sapir-Lekhovitser, Y.; Rotenberg, M.Y.; Jopp, J.; Friedman, G.; Polyak, B.; Cohen, S. Magnetically actuated tissue engineered scaffold: Insights into mechanism of physical stimulation. Nanoscale 2016, 8, 3386–3399. [Google Scholar] [CrossRef] [PubMed]
- Fuhrer, R.; Hofmann, S.; Hild, N.; Vetsch, J.R.; Herrmann, I.K.; Grass, I.K.; Stark, W.J. Pressureless mechanical induction of stem cell differentiation is dose and frequency dependent. PLoS ONE 2013, 8, 81362. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, F.; Leng, J.; Liu, Y. Personalized 4D printing of bioinspired tracheal scaffold concept based on magnetic stimulated shape memory composites. Compos. Sci. Technol. 2019, 184, 107866. [Google Scholar] [CrossRef]
- Lin, C.; Zhang, L.; Liu, Y.; Liu, L.; Leng, J. 4D printing of personalized shape memory polymer vascular stents with negative Poisson’s ratio structure: A preliminary study. Sci. China (Technol. Sci.) 2020, 63, 52–62. [Google Scholar] [CrossRef]
- Yim, S.; Gultepe, E.; Gracias, D.H.; Sitti, M. Biopsy using a magnetic capsule endoscope carrying, releasing, and retrieving untethered microgrippers. IEEE Trans. Bio-Med. Eng. 2014, 61, 513–521. [Google Scholar]
- Verma, V.; Hancock, W.O.; Catchmark, J.M. Micro- and nanofabrication processes for hybrid synthetic and biological system fabrication. IEEE Trans. Adv. Packag. 2005, 28, 584–593. [Google Scholar] [CrossRef]
- Sthijns, M.; Blitterswijk, C.A.V.; Lapointe, V. Synthetic materials that affect the extracellular matrix via cellular metabolism and responses to a metabolic state. Front. Bioeng. Biotechnol. 2021, 9, 742132. [Google Scholar] [CrossRef]
- Othman, S.F.; Ozer, M.B.; Xu, H.; Royston, T.J.; Magin, R.L. Radiation force of ultrasound as shear wave source in microscopic magnetic resonance elastography. J. Acoust. Soc. Am. 2005, 118, 2006–2016. [Google Scholar] [CrossRef]
- Xu, T.; Yu, J.; Vong, C.; Wang, B.; Wu, X.; Zhang, L. Dynamic morphology and swimming properties of rotating miniature swimmers with soft tails. IEEE ASME Trans. Mechatron. 2019, 24, 924–934. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Zhang, J.; Salehizadeh, M.; Onaizah, O.; Diller, E. Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions. Sci. Robot. 2019, 4, eaav4494. [Google Scholar] [CrossRef]
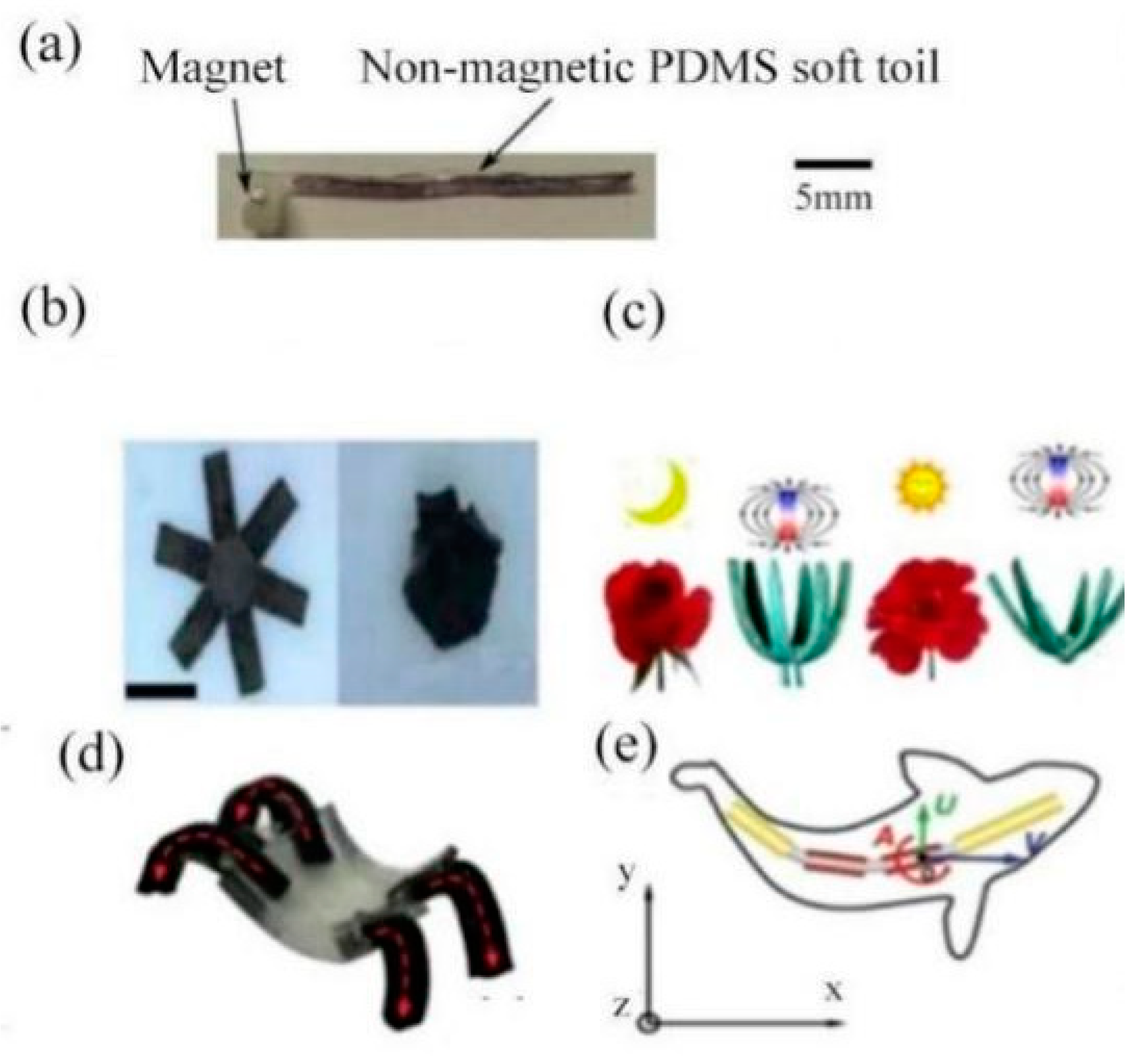
- Gao, W.; Wang, L.; Wang, X.; Liu, H. Magnetic driving flowerlike soft platform: Biomimetic fabrication and external regulation. ACS Appl. Mater. Interfaces 2016, 8, 14182–14189. [Google Scholar] [CrossRef]
- Venkiteswaran, V.K.; Samaniego, L.F.P.; Sikorski, J.; Misra, S. Bio-inspired terrestrial motion of magnetic soft millirobots. IEEE Robot. Autom. Lett. 2019, 4, 1753–1759. [Google Scholar] [CrossRef]
- Li, T.; Li, J.; Zhang, H.; Chang, X.; Song, W.; Hu, Y.; Shao, G.; Sandraz, E.; Zhang, G.; Li, L.; et al. Magnetically propelled fish-like nanoswimmers. Small 2016, 12, 6098–6105. [Google Scholar] [CrossRef]
- Fu, H.; Nan, K.; Bai, W.; Huang, W.; Bai, K.; Lu, L.; Zhou, C.; Liu, Y.; Liu, F.; Wang, J.; et al. Morphable 3D mesostructures and microelectronic devices by multistable buckling mechanics. Nat. Mater. 2018, 17, 268. [Google Scholar] [CrossRef]
- Park, J.K.; Nan, K.; Luan, H.; Zheng, N.; Zhao, S.; Zhang, H.; Cheng, X.; Wang, H.; Li, K.; Xie, T.; et al. Remotely triggered assembly of 3D mesostructures through shape-memory effects. Adv. Mater. 2019, 31, 1905715. [Google Scholar] [CrossRef]
- Zhou, C.; Yang, Y.; Wang, J.; Wu, Q.; Gu, Z.; Zhou, Y.; Liu, X.; Yang, Y.; Tang, H.; Ling, Q.; et al. Ferromagnetic soft catheter robots for minimally invasive bioprinting. Nat. Commun. 2021, 12, 5072. [Google Scholar] [CrossRef] [PubMed]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhao, J.; Luo, Z.; Li, Z. Recent Research Developments of 4D Printing Technology for Magnetically Controlled Smart Materials: A Review. Magnetochemistry 2023, 9, 204. https://doi.org/10.3390/magnetochemistry9080204
Wang H, Zhao J, Luo Z, Li Z. Recent Research Developments of 4D Printing Technology for Magnetically Controlled Smart Materials: A Review. Magnetochemistry. 2023; 9(8):204. https://doi.org/10.3390/magnetochemistry9080204
Chicago/Turabian StyleWang, Hujun, Jinqiu Zhao, Zhuo Luo, and Zhenkun Li. 2023. "Recent Research Developments of 4D Printing Technology for Magnetically Controlled Smart Materials: A Review" Magnetochemistry 9, no. 8: 204. https://doi.org/10.3390/magnetochemistry9080204
APA StyleWang, H., Zhao, J., Luo, Z., & Li, Z. (2023). Recent Research Developments of 4D Printing Technology for Magnetically Controlled Smart Materials: A Review. Magnetochemistry, 9(8), 204. https://doi.org/10.3390/magnetochemistry9080204