
Dynamics of Non-Magnetic Droplets and Bubbles in Magnetic Fluids in Microfluidic Channels under the Influence of a Magnetic Field


Abstract
1. Introduction
2. Materials and Methods
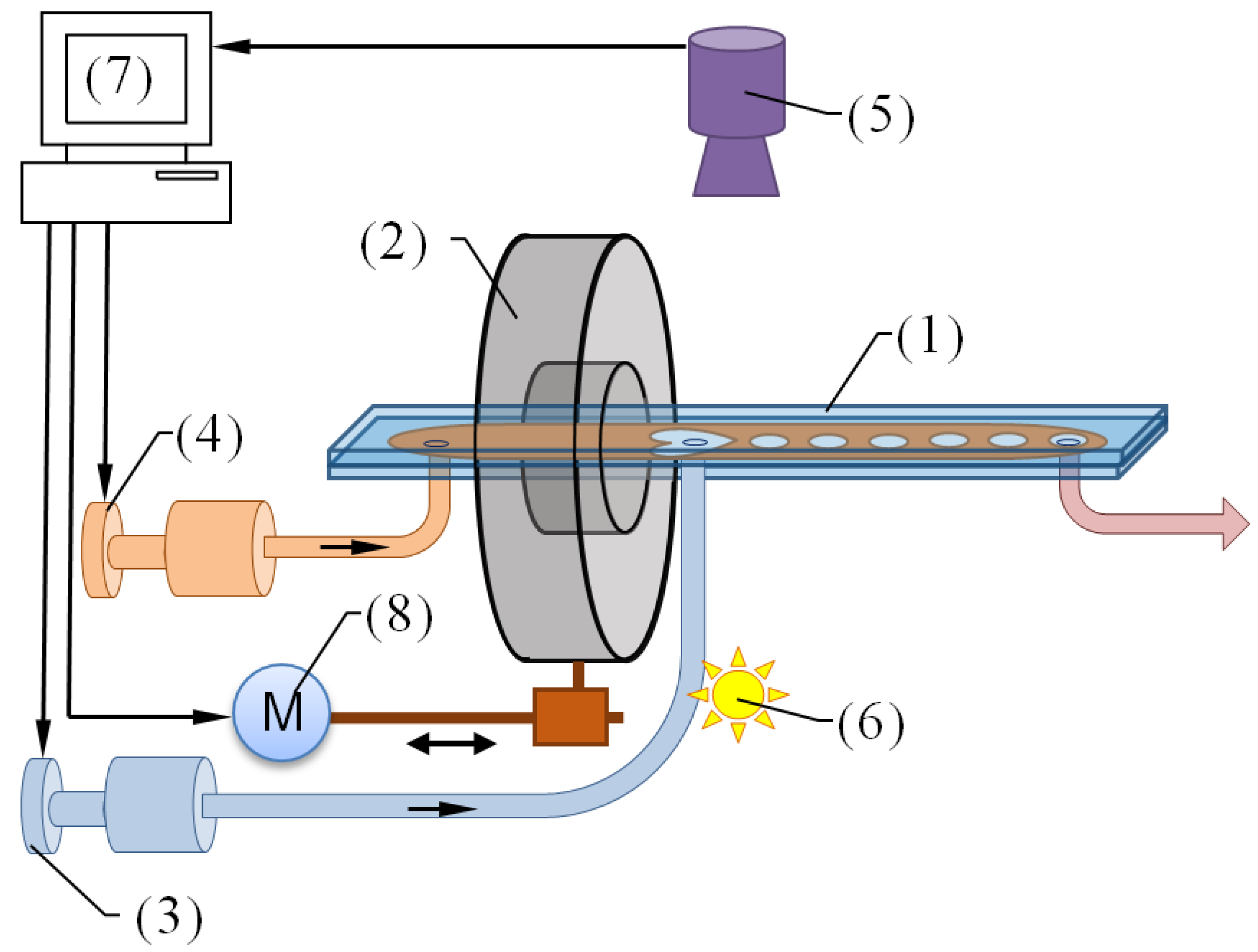
2.1. Experimental Setup
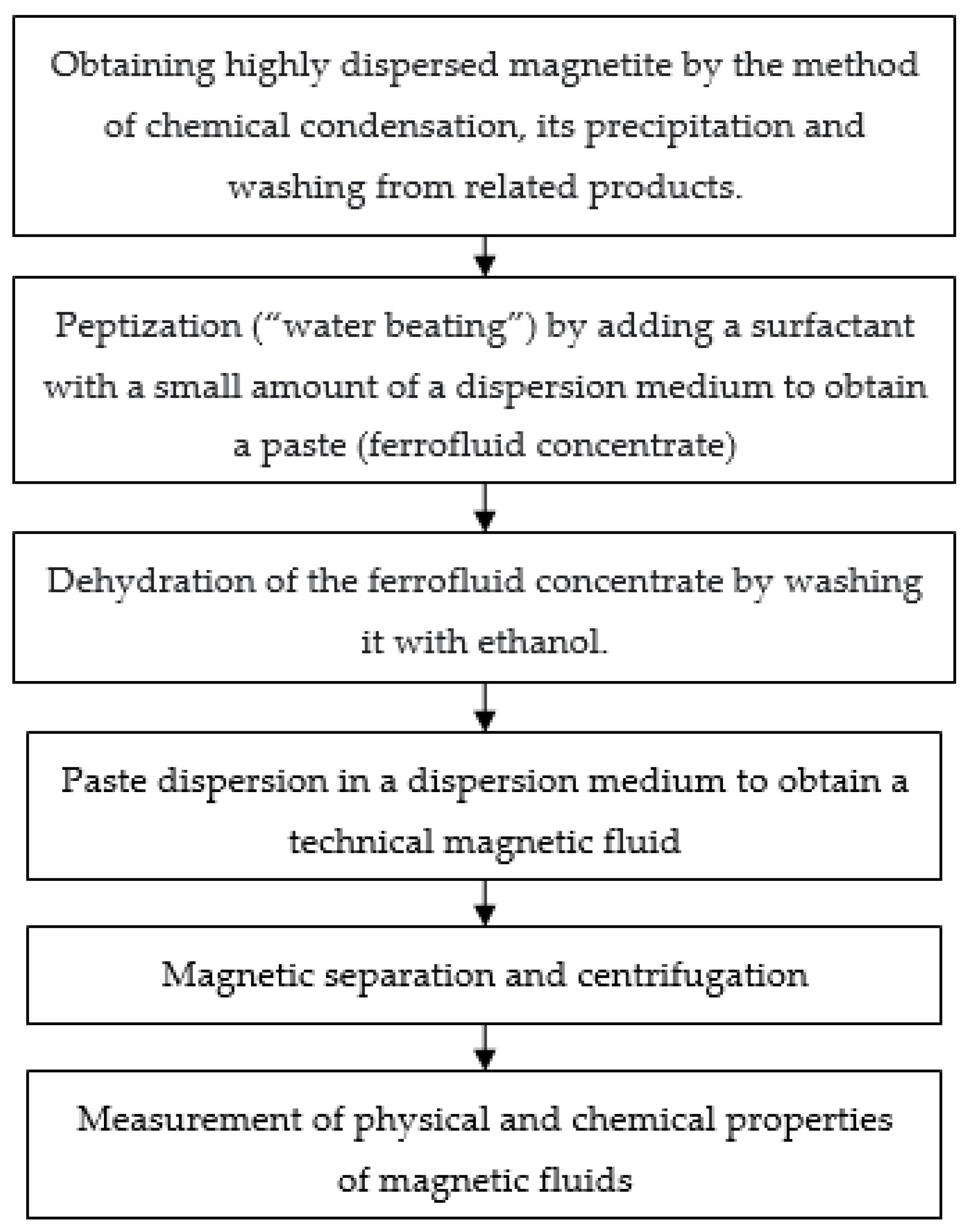
- 1.
- Preparation of microfluidic chip layers:
- -
- Processing of slides with a solution of NaOH in 6% hydrogen peroxide to remove organic compounds from the glass surface;
- -
- Washing glasses with distilled water and drying them;
- -
- Producing a stencil of the required configuration from Parafilm M® film using the Gifttec MT365 cutting plotter (Creator: Gifttec, China). The stencil model was developed in the CorelDRAW program.
- 2.
- Microfluidic chip assembly: A stencil cut from Parafilm® film is placed between two slides.
- 3.
- Preheating of the heating plate IKA C-Mag HP 7 to 55 °C for uniform heat distribution.
- 4.
- Sintering of the device for 10 min at a heating temperature of 55 °C.
- 5.
- Gluing connectors to the inputs and outputs of a microfluidic chip.
2.2. Physical Properties of the Samples
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rosensweig, R.E. Ferrohydrodynamics; Courier Corporation: Chelmsford, MA, USA, 1984; p. 348. [Google Scholar]
- Socoliuc, V.; Avdeev, M.V.; Kuncser, V.; Turcu, R.; Tombácz, E.; Vékás, L. Ferrofluids and bio-ferrofluids: Looking back and stepping forward. Nanoscale 2022, 14, 4786–4886. [Google Scholar] [CrossRef] [PubMed]
- Pappell, S.S. MPK Low Viscosity Magnetic Fluid Obtained by the Colloidal Suspension of Magnetic Particles. U.S. Patent No. 3215572, 2 November 1965. [Google Scholar]
- Philip, J. Magnetic nanofluids: Recent advances, applications, challenges, and future directions. Adv. Colloid Interface Sci. 2022, 311, 102810. [Google Scholar] [CrossRef] [PubMed]
- Elsaady, W.; Oyadiji, S.O.; Nasser, A. A review on multi-physics numerical modelling in different applications of magnetorheological fluids. J. Intell. Mater. Syst. Struct. 2020, 31, 1855–1897. [Google Scholar] [CrossRef]
- Solovyova, A.Y.; Elfimova, E.A.; Ivanov, A.O.; Camp, P.J. Modified mean-field theory of the magnetic properties of concentrated, high-susceptibility, polydisperse ferrofluids. Phys. Rev. E 2017, 96, 052609. [Google Scholar] [CrossRef]
- Li, Y.; Han, P.; Li, D.; Chen, S.; Wang, Y. Typical dampers and energy harvesters based on characteristics of ferrofluids. Friction 2023, 11, 165–186. [Google Scholar] [CrossRef]
- Kazakov, Y.B.; Morozov, N.A.; Nesterov, S.A. Development of models of the magnetorheological fluid damper. J. Magn. Magn. Mater. 2017, 431, 269–272. [Google Scholar] [CrossRef]
- Kazakov, Y.B.; Filippov, V.A. Calculation of the performance of the electromagnetic magnetic fluid separator non-magnetic materials. IOP Conf. Ser. Mater. Sci. Eng. 2020, 950, 012003. [Google Scholar] [CrossRef]
- Lagutkina, D.Y.; Saikin, M.S. The research and development of inclination angle magnetic fluid detector with a movable sensing element based on permanent magnets. J. Magn. Magn. Mater. 2017, 431, 149–151. [Google Scholar] [CrossRef]
- Pamme, N. Magnetism and microfluidics. Lab Chip 2006, 6, 24–38. [Google Scholar] [CrossRef]
- Xuan, X. Recent advances in continuous-flow particle manipulations using magnetic fluids. Micromachines 2019, 10, 744. [Google Scholar] [CrossRef]
- Nam-Trung, N. Micro-magnetofluidics: Interactions between magnetism and fluid flow on the microscale. Microfluid. Nanofluidics 2012, 12, 1–16. [Google Scholar] [CrossRef]
- Munaz, A.; Shiddiky, M.J.A.; Nguyen, N.T. Recent advances and current challenges in magnetophoresis based micro magnetofluidics. Biomicrofluidics 2018, 12, 031501. [Google Scholar] [CrossRef] [PubMed]
- Alnaimat, F.; Dagher, S.; Mathew, B.; Hilal-Alnqbi, A.; Khashan, S. Microfluidics based magnetophoresis: A review. Chem. Rec. 2018, 18, 1596–1612. [Google Scholar] [CrossRef] [PubMed]
- Ivanov, A.S.; Pshenichnikov, A.F. Dynamics of magnetophoresis in dilute magnetic fluids. Magnetohydrodynamics 2010, 2, 125–136. [Google Scholar] [CrossRef][Green Version]
- Ivanov, A.S.; Pshenichnikov, A.F. Magnetophoresis and diffusion of colloidal particles in a thin layer of magnetic fluids. J. Magn. Magn. Mater. 2010, 322, 2575–2580. [Google Scholar] [CrossRef]
- Zhou, R.; Wang, C. Multiphase ferrofluid flows for micro-particle focusing and separation. Biomicrofluidics 2016, 10, 034101. [Google Scholar] [CrossRef]
- Kirby, D.; Siegrist, J.; Kijanka, G.; Zavattoni, L.; Sheils, O.; O’Leary, J.; Ducrée, J. Centrifugo-magnetophoretic particle separation. Microfluid. Nanofluidics 2012, 13, 899–908. [Google Scholar] [CrossRef]
- Issadore, D.; Franke, T.; Brown, K.A.; Hunt, T.P.; Westervelt, R.M. High-voltage dielectrophoretic and magnetophoretic hybrid integrated circuit/microfluidic chip. J. Microelectromech. Syst. 2009, 18, 1220–1225. [Google Scholar] [CrossRef]
- Kichatov, B.; Korshunov, A.; Sudakov, V.; Gubernov, V.; Golubkov, A.; Kiverin, A.; Nastulyavichus, A.; Kudryashov, S. Pattern formation and collective effects in the process of the motion of magnetic nanomotors in narrow channels. Phys. Chem. Chem. Phys. 2023, 25, 11780–11788. [Google Scholar] [CrossRef]
- Mohammad Jafarpour, A.; Rostamzadeh Khosroshahi, A.; Hanifi, M.; Sadegh Moghanlou, F. Experimental study on the performance of a mini-scale Y-type mixer with two liquid metal-enabled pumps. Phys. Fluids 2022, 34, 112110. [Google Scholar] [CrossRef]
- Xiong, Q.; Song, X.; Yang, M.; Zhou, L.; Li, Z.; Zhu, X.; Zhi, L. Future trends in magnetic source device design for magnetic targeted drug delivery system. Int. J. Appl. Electromagn. Mech. 2021, 67, 261–277. [Google Scholar] [CrossRef]
- Yapici, M.K.; Zou, J. Permalloy-coated tungsten probe for magnetic manipulation of micro droplets. Microsyst. Technol. 2008, 14, 881–891. [Google Scholar] [CrossRef]
- Smistrup, K.; Tang, P.T.; Hansen, O.; Hansen, M.F. Microelectromagnet for magnetic manipulation in lab-on-a-chip systems. J. Magn. Magn. Mater. 2006, 300, 418–426. [Google Scholar] [CrossRef]
- Timonen, J.V.I.; Grzybowski, B.A. Tweezing of Magnetic and Non-Magnetic Objects with Magnetic Fields. Adv. Mater. 2017, 29, 1603516. [Google Scholar] [CrossRef]
- Ge, S.; Nemiroski, A.; Mirica, K.A.; Mace, C.R.; Hennek, J.W.; Kumar, A.A.; Whitesides, G.M. Magnetic levitation in chemistry, materials science, and biochemistry. Angew. Chem. Int. Ed. 2020, 59, 17810–17855. [Google Scholar] [CrossRef]
- Zhu, G.-P.; Wang, Q.-Y.; Ma, Z.-K.; Wu, S.-H.; Guo, Y.-P. Droplet Manipulation under a Magnetic Field: A Review. Biosensors 2022, 12, 156. [Google Scholar] [CrossRef] [PubMed]
- Teh, S.-Y.; Lin, R.; Hung, L.-H.; Lee, A.P. Droplet microfluidics. Lab Chip 2008, 8, 198–220. [Google Scholar] [CrossRef]
- Jeyhani, M.; Navi, M.; Chan, K.W.Y.; Kieda, J.; Tsai, S.S.H. Water-in-water droplet microfluidics: A design manual. Biomicrofluidics 2022, 16, 061503. [Google Scholar] [CrossRef]
- Huang, B.; Xie, H.; Li, Z. Microfluidic Methods for Generation of Submicron Droplets: A Review. Micromachines 2023, 14, 638. [Google Scholar] [CrossRef]
- Zhu, P.; Wang, L. Passive and active droplet generation with microfluidics: A review. Lab Chip 2017, 17, 34–75. [Google Scholar] [CrossRef]
- Al-Hetlani, E.; Amin, M.O. Continuous magnetic droplets and microfluidics: Generation, manipulation, synthesis and detection. Microchim. Acta 2019, 186, 55. [Google Scholar] [CrossRef]
- Li, Q.; Feng, F.; Xu, M.; Liu, Y.; Li, M.; Feng, X.; Wang, X.; Yao, L. Multifunctional liquid microrobots based on paramagnetic microdroplets. Cell Rep. Phys. Sci. 2023, 4, 101279. [Google Scholar] [CrossRef]
- Fan, X.; Sun, M.; Sun, L.; Xie, H. Ferrofluid droplets as liquid microrobots with multiple deformabilities. Adv. Funct. Mater. 2020, 30, 2000138. [Google Scholar] [CrossRef]
- Liu, X.; Kent, N.; Ceballos, A.; Streubel, R.; Jiang, Y.; Chai, Y.; Kim, P.Y.; Forth, J.; Hellman, F.; Shi, S.; et al. Reconfigurable ferromagnetic liquid droplets. Science 2019, 365, 264–267. [Google Scholar] [CrossRef] [PubMed]
- Kichatov, B.; Korshunov, A.; Sudakov, V.; Petrov, O.; Gubernov, V.; Korshunova, E.; Kolobov, A.; Kiverin, A. Magnetic Nanomotors in Emulsions for Locomotion of Microdroplets. ACS Appl. Mater. Interfaces 2022, 14, 10976–10986. [Google Scholar] [CrossRef]
- Gong, X.; Peng, S.; Wen, W.; Sheng, P.; Li, W. Design and fabrication of magnetically functionalized core/shell microspheres for smart drug delivery. Adv. Funct. Mater. 2009, 19, 292–297. [Google Scholar] [CrossRef]
- Bijarchi, M.A.; Favakeh, A.; Alborzi, S.; Shafii, M.B. Experimental investigation of on-demand ferrofluid droplet generation in microfluidics using a Pulse-Width Modulation magnetic field with proposed correlation. Sens. Actuators B Chem. 2021, 329, 129274. [Google Scholar] [CrossRef]
- Yang, R.-J.; Hou, H.-H.; Wang, Y.-N.; Fu, L.-M. Micro-magnetofluidics in microfluidic systems: A review. Sens. Actuators B Chem. 2016, 224, 1–15. [Google Scholar] [CrossRef]
- Huang, X.; Saadat, M.; Bijarchi, M.A.; Shafii, M.B. Ferrofluid double emulsion generation and manipulation under magnetic fields. Chem. Eng. Sci. 2023, 270, 118519. [Google Scholar] [CrossRef]
- Fadaei, M.; Majidi, S.; Mojaddam, M. Droplet generation in a co-flowing microchannel influenced by magnetic fields applied in parallel and perpendicular to flow directions. J. Magn. Magn. Mater. 2023, 570, 170528. [Google Scholar] [CrossRef]
- Dunne, P.; Adachi, T.; Dev, A.A.; Sorrenti, A.; Giacchetti, L.; Bonnin, A.; Bourdon, C.; Mangin, P.H.; Coey, J.M.D.; Doudin, B.; et al. Liquid flow and control without solid walls. Nature 2020, 581, 58–62. [Google Scholar] [CrossRef] [PubMed]
- Ryapolov, P.A.; Sokolov, E.A.; Bashtovoi, V.G.; Reks, A.G.; Postnikov, E.B. Equilibrium configurations in a magnetic fluid-based field mapping and gas pressure measuring system: Experiment and simulations. AIP Adv. 2021, 11, 015206. [Google Scholar] [CrossRef]
- Ryapolov, P.A.; Sokolov, E.A.; Postnikov, E.B. Behavior of a gas bubble separating from a cavity formed in magnetic fluid in an inhomogeneous magnetic field. J. Magn. Magn. Mater. 2022, 549, 169067. [Google Scholar] [CrossRef]
- Sokolov, E.; Kaluzhnaya, D.; Shel’deshova, E.; Ryapolov, P. Formation and Behaviour of Active Droplets and Bubbles in a Magnetic Fluid in an Inhomogeneous Magnetic Field. Fluids 2022, 8, 2. [Google Scholar] [CrossRef]
- Sokolov, E.; Vasilyeva, A.; Kalyuzhnaya, D.; Ryapolov, P. Dynamics of nonmagnetic inclusions in a microchannel with a magnetic fluid in an inhomogeneous magnetic field. AIP Adv. 2022, 12, 035333. [Google Scholar] [CrossRef]
- Ryapolov, P.A.; Sokolov, E.A.; Kalyuzhnaya, D.A. Effect of the Magnetic Field’s Configuration on the Detachment of Gas Bubbles in a Magnetic Fluid. Bull. Russ. Acad. Sci. Phys. 2023, 87, 300–303. [Google Scholar] [CrossRef]
- Ryapolov, P.A.; Sokolov, E.A.; Shel’deshova, E.V.; Kalyuzhnaya, D.A.; Vasilyeva, A.O. Dynamics of Multiphase Magnetic Fluid Systems in Microchannels of Different Shapes inside a Nonhomogeneous Magnetic Field. Bull. Russ. Acad. Sci. Phys. 2023, 87, 295–299. [Google Scholar] [CrossRef]
- Kalyuzhnaya, D.A.; Sokolov, E.A.; Vasilyeva, A.O.; Sutarina, I.Y.; Ryapolov, P.A. Dynamics of Nonmagnetic and Magnetic Emulsions in Microchannels of Various Materials. Fluids 2023, 8, 42. [Google Scholar] [CrossRef]
- Sokolov, E.A.; Kalyuzhnaya, D.A.; Vasilyeva, A.O.; Ryapolov, P.A. Microfluidic Devices with Integrated Controlled Magnetic Field Sources. In Proceedings of the 2022 Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), St. Petersburg, Russia, 25–28 January 2022; pp. 1612–1615. [Google Scholar] [CrossRef]
- Baas, S.; Saggiomo, V. Ender3 3D printer kit transformed into open, programmable syringe pump set. HardwareX 2021, 10, e00219. [Google Scholar] [CrossRef]
- Ryapolov, P.A.; Bashtovoi, V.G.; Reks, A.G.; Sokolov, E.A.; Postnikov, E.B. Study of the working area of a ring magnet magnetic levitation system using a thin layer of magnetic fluid. IEEE Magn. Lett. 2020, 11, 7104305. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fluid Parameters | MF-1 | MF-2 | MF-3 |
|---|---|---|---|
| Carrier fluid | water | ||
| Density ρ, kg/m3 | 1212.4 | 1082.0 | 1056.0 |
| Viscosity, η, mPa∙s | 5.38 | 2.12 | 1.47 |
| Volume concentration, φ, % | 5.6 | 2.15 | 1.65 |
| Saturation magnetization, Ms, kA/m | 21.7 | 11.0 | 6.98 |
| q1, µL/s | Continuous Phase | q2, µL/s | Dispersed Phase | ||
|---|---|---|---|---|---|
| Re | Re | ||||
| 0.15 | 4.39 × 10−9 | 9.95 × 10−9 | 1.40 × 10−8 | 0.18 | 1.68 × 10−9 |
| 0.29−10 | 8.50 × 10−9 | 1.92 × 10−8 | 2.71 × 10−8 | ||
| 0.74−10 | 2.17 × 10−8 | 4.91 × 10−8 | 6.91 × 10−8 | 0.37 | 3.46 × 10−9 |
| 1.10 | 3.22 × 10−8 | 7.30 × 10−8 | 1.03 × 10−8 | ||
| q1, µL/s | Continuous Phase | q2, µL/s | Dispersed Phase | ||
|---|---|---|---|---|---|
| Re | Re | ||||
| 0.74 | 2.17 × 10−8 | 4.91 × 10−8 | 6.91 × 10−8 | 0.04 | 2.35 × 10−10 |
| 1.10 | 3.22 × 10–8 | 7.30 × 10−8 | 1.03 × 10−7 | ||
| 1.479 | 4.31 × 10−8 | 9.75 × 10−8 | 1.37 × 10−7 | ||
| 1.849 | 5.39 × 10−8 | 1.22 × 10−7 | 1.72 × 10−7 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalyuzhnaya, D.; Sokolov, E.; Vasilyeva, A.; Sutarina, I.; Shabanova, I.; Ryapolov, P. Dynamics of Non-Magnetic Droplets and Bubbles in Magnetic Fluids in Microfluidic Channels under the Influence of a Magnetic Field. Magnetochemistry 2023, 9, 197. https://doi.org/10.3390/magnetochemistry9080197
Kalyuzhnaya D, Sokolov E, Vasilyeva A, Sutarina I, Shabanova I, Ryapolov P. Dynamics of Non-Magnetic Droplets and Bubbles in Magnetic Fluids in Microfluidic Channels under the Influence of a Magnetic Field. Magnetochemistry. 2023; 9(8):197. https://doi.org/10.3390/magnetochemistry9080197
Chicago/Turabian StyleKalyuzhnaya, Dariya, Evgeniy Sokolov, Anastasia Vasilyeva, Irina Sutarina, Irina Shabanova, and Petr Ryapolov. 2023. "Dynamics of Non-Magnetic Droplets and Bubbles in Magnetic Fluids in Microfluidic Channels under the Influence of a Magnetic Field" Magnetochemistry 9, no. 8: 197. https://doi.org/10.3390/magnetochemistry9080197
APA StyleKalyuzhnaya, D., Sokolov, E., Vasilyeva, A., Sutarina, I., Shabanova, I., & Ryapolov, P. (2023). Dynamics of Non-Magnetic Droplets and Bubbles in Magnetic Fluids in Microfluidic Channels under the Influence of a Magnetic Field. Magnetochemistry, 9(8), 197. https://doi.org/10.3390/magnetochemistry9080197