5.1. A Monotwin Crystal
As noted earlier, this work is a direct continuation of work [
20]. In the last publication, the results of the calculation of the evolution of magnetization vector
were presented for the material and the computational domain considered in this article. Firstly, the coupled variational equations corresponding to the differential formulation of the magnetic problem (see
Section 2.1) were solved for the initial distribution of magnetization vector
, shown in
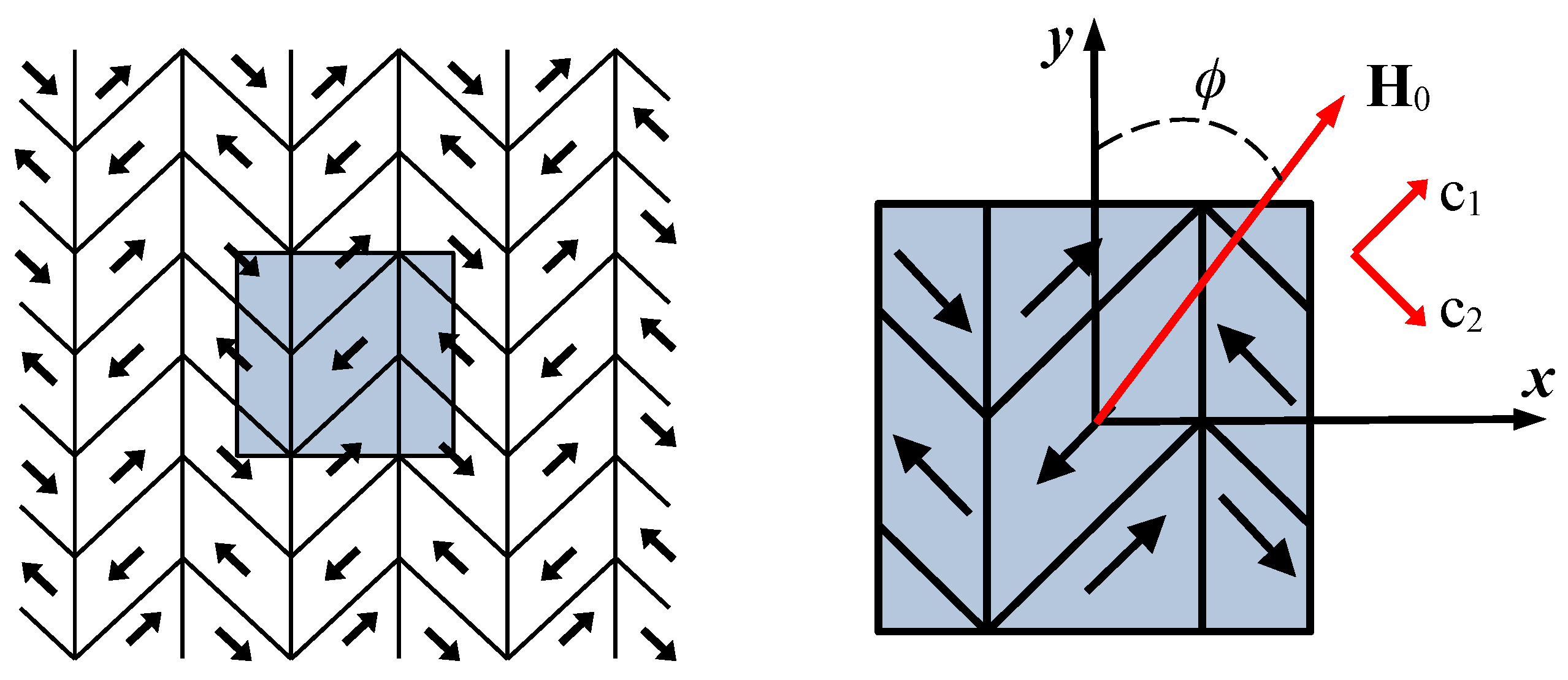
Figure 3, in the absence of an external magnetic field. This is a solution to Problem 1 posed in
Section 4.2. Such a magnetic structure is considered to be initial for the subsequent application of the external magnetic field at different angles
to the
y axis (see
Figure 3). In our case,
and, as will be shown below, such a change in the angle is enough to describe the magnetic and deformation behavior of various polytwin crystals. The obtained results demonstrate that at the initial stage, the magnetization occurs due to the motion of the magnetic domain walls and also due to the rotation of the magnetization vectors.
In work [
20] discussed above, the detwinning process was not taken into account. However, knowing the distribution of the magnetization vector in the computational domain for angles
, we can construct the dimensionless mass magnetic moments
corresponding to these angles, where
.
is defined as the average value of the mass magnetic moment in elements
(see
Figure 2) corresponding to the center of the computational domain in
Figure 3, for this domain, and in elements
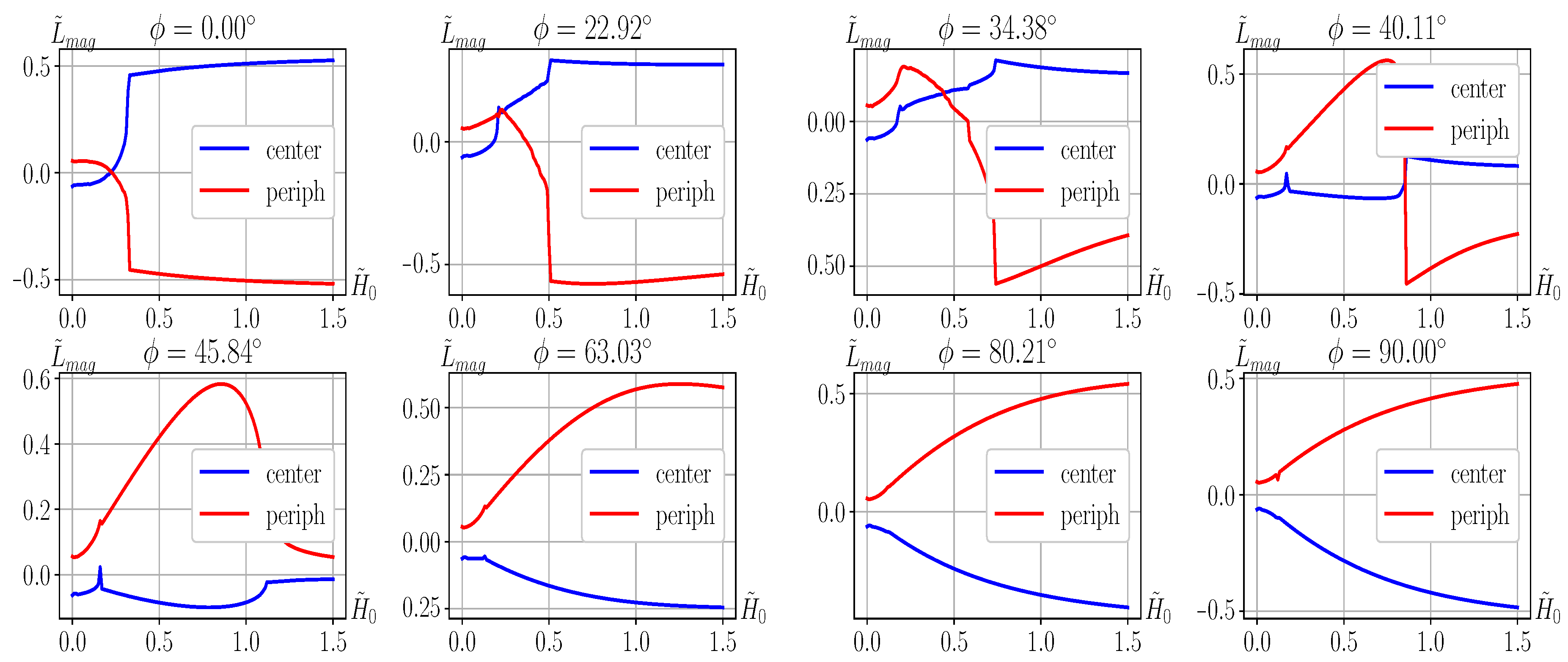
corresponding to the periphery of this computational domain, for this domain. The key results applicable for further explanation and use are shown in
Figure 4 depending on
. The blue color shows the moment for element
(the middle area in
Figure 3), and red for element
(the periphery area in
Figure 3).
is the angle to the
y axis in degrees.
The dependence of
on
, shown in
Figure 3 for angle
, allows us to solve Problem 2 formulated in
Section 4.2 and determine the critical value of mass magnetic moment
, at which the detwinning process is realized. Here, the vector of external magnetic field
acts along the axis of easy magnetization
of one of the elements of the twin, located in the central region of
Figure 3, the same as in experiments [
32,
33,
34,
35], in which the magnetization curve is constructed taking into account the detwinning process.
As follows from Figure 6
d of article [
20], 180-degree walls separating the magnetic domains disappear at angle
already for
, which corresponds to
T, and vector
lies completely in the plane of this figure. For this reason, the vector of mass magnetic moment
in
Figure 4 (its average value) at angle
is directed perpendicular to the plane of this figure when viewed from the reader (red line, counterclockwise rotation, positive moment
) in the peripheral region of
Figure 3, where the vector of easy magnetization is
, or is also perpendicular to the plane of this figure (blue line, clockwise rotation, negative moment
) in the middle area of
Figure 3, where the vector of easy magnetization is
. The directions of these moments in these areas correspond to all detwinning cases discussed in
Section 3. However, due to a very small value of
in the central region, detwinning will occur in accordance with the first case, when the mass magnetic moment in the peripheral area reaches a critical value
. As follows from the experiments presented in works [
32,
33,
34,
35], detwinning begins when the external magnetic field reaches value
T. For the smallest value
, to which
corresponds, from
Figure 4 we find that for angle
,
,
N ·m/m
3 and this is the solution to Problem 2 posed in
Section 4.2. The distributions of
, including those shown in
Figure 4, and the obtained critical value of the mass magnetic moment allow us to conclude that there is no detwinning until
is less than
. In the area of
, detwinning occurs in accordance with the first case. At the same time,
, at which the critical value
is reached, varies from 0.40 at
to 0.72 at
. At the angle of 90°, the curves of the dependence of
on
for element
(the mid-area of the calculated domain in
Figure 3) and for element
(the periphery of the computational domain in
Figure 3) differ only by a sign (see
Figure 4). This means that in this case, detwinning can occur both in accordance with the first and the second case but only when the external magnetic field reaches value
. Physically, the probability of any of these cases is the same due to all kinds of fluctuations accompanying the magnetic, force, and temperature processes occurring in the medium. However, as shown below, at
, detwinning occurs in accordance with the second case. Therefore, from the viewpoint of mathematics, when approaching the angle of 90° from the side 90°−, then detwinning occurs in accordance with the first case, but when approaching it from the side 90°+, detwinning occurs in accordance with the second case. Without having specific physical data, we will continue to adhere to this viewpoint.
To construct models of polytwin crystal behavior, the dependencies of
on
were calculated for 17 values of angles
, including 8 shown in
Figure 4. The segment along angle
from 0 to 1.5 radians was passed in increments of 0.1 radians, 1.5708 radians corresponding to 90°.
Table 2 shows the values of
, at which the first or the second case of the detwinning process occurs for the corresponding
. As noted earlier, detwinning does not occur for angles
less than 40°. Therefore, the table shows the results only for the angles greater than 40°.
Such a change in angle
is sufficient to describe the magnetic and deformation reaction of the material to the application of an external magnetic field at the angles from 0° to 360° completely, provided that we take into account the following.
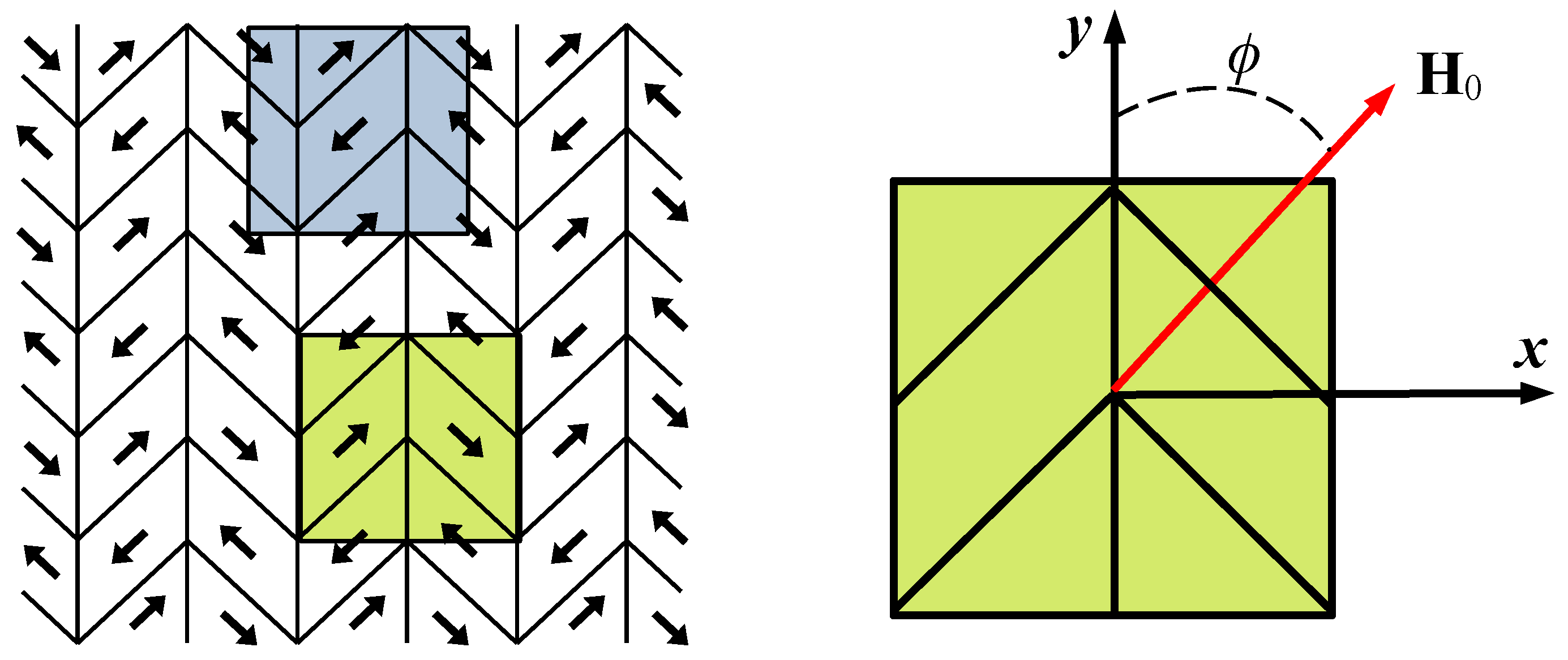
Figure 3 shows the computational domain, which is duplicated in the horizontal and vertical directions. Such a choice of the computational domain allows us to set the periodicity condition of the solution.
However, the above choice of domain duplication in space is not the only one. In
Figure 5, in addition to the computational domain, another domain containing a twin and having a certain symmetry is presented (let’s denote it as
). Further analysis will be carried out based on the symmetry. In
Figure 6, the magnetic structure of this symmetrical domain
is shown. Here, the
axis is the vertical axis
y of symmetry for the domain
and axis
is axis
x in
Figure 5. All angles between axes
,
are equal to 45°. The vectors of spontaneous magnetization
are directed from point 0 to points 1 and
for one group of magnetic domains and from point 0 to points 2 and
for another group (see
Figure 5 and
Figure 6).
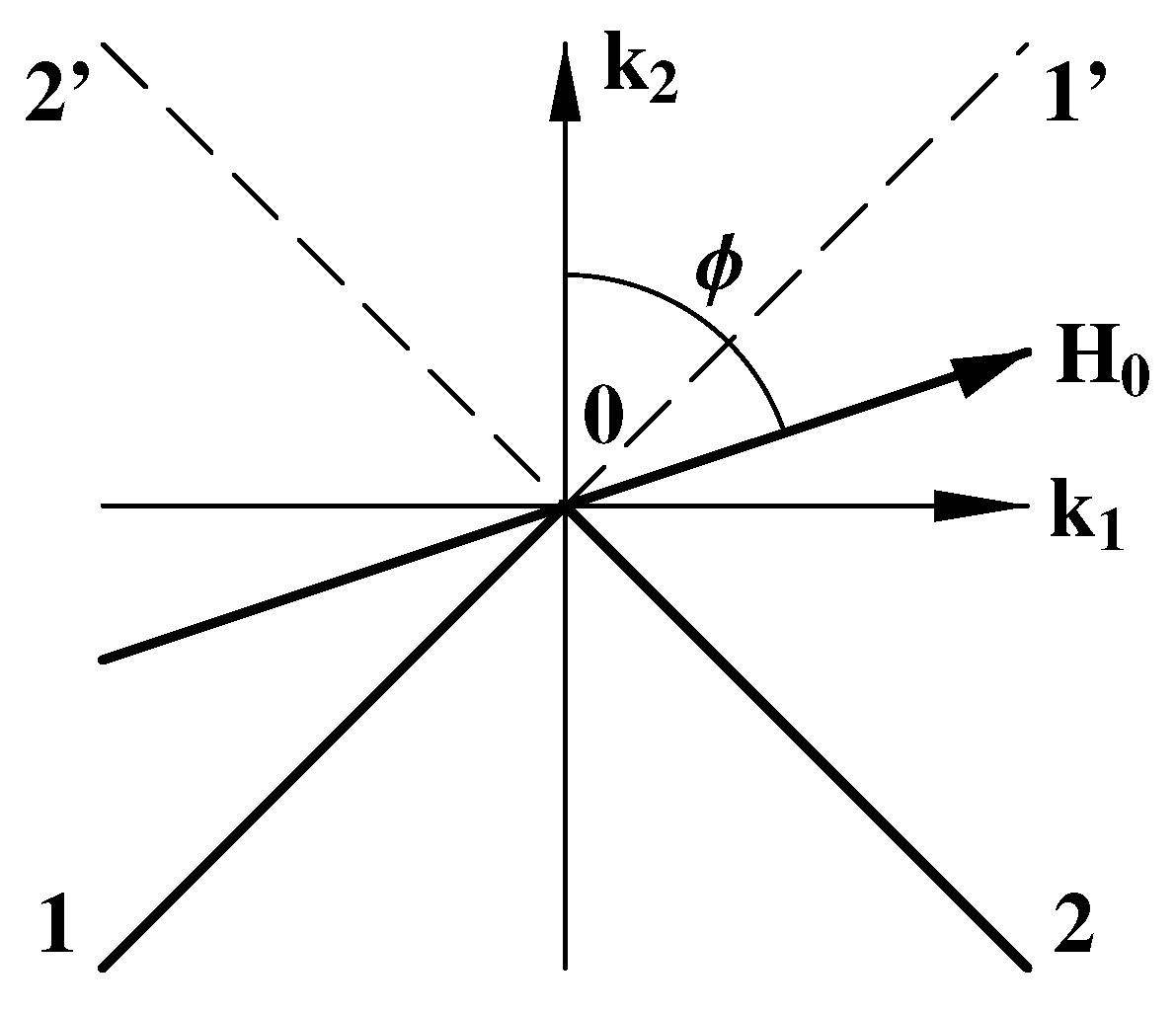
The magnetic structure presented in
Figure 6 has four 180-degree axes of symmetry:
and two diagonals
and
. The symmetry with respect to diagonals replaces vectors
and
with vectors
and
or
, and
, respectively. The symmetry with respect to vector
replaces vector
with vector
and symmetry with respect to vector
replaces vector
with vector
. We use symmetries with respect to vectors
and
based on the fact that mutual positions of vectors
and
correspond to the conditions of such symmetry. We describe the symmetry using an orthogonal tensor [
37].
This tensor rotates any vector
with respect to vector
by an angle
counterclockwise, leaving its length unchanged:
. Moreover, for this transformation, the angle between the two vectors
and
remains unchanged:
.
Using Expression (
19), a 180-degree rotation relative to the
axis can be described by the orthogonal tensor
. As noted earlier, although the problem under consideration is a plane, when solving the Landau–Lifshitz–Gilbert equation, we deal with vector
that has three components,
. However, there is no reason to take into account
when calculating the magnetization curves and the mass magnetic moment for which we carry out this analysis.
does not affect the magnetization curves, as will be shown below, and the magnitude of the mass magnetic moment required to determine its critical value is calculated when
is already zero. Therefore, in the following, the components of any vector or tensor associated with vector
are not taken into account. Bearing in mind the above consideration,
and vectors
are transformed by such rotation into vectors
,
, and
(vectors
,
, and
are a mirror image relative to axis
of vectors
,
and
). The magnetization curves, which are described by the relation
remain unchanged in this case since
, but vector
changes its sign because
(both can be easily verified using a simple substitution. Note that
does not affect
at all). Due to such rotation, angle
between vector
and the fixed vertical axis
y (see
Figure 5), which is equal to
for vector
, becomes equal to
(mathematically, this follows from the analysis of scalar products
and
). Bearing this in mind and considering the results of
Section 3, we conclude that the detwinning process for
begins at the same
as is given in
Table 2 for angle
but unlike the first case it will be carried out in accordance with the second case discussed in
Section 3. The magnetization curves will be exactly the same as for angle
.
Now, let us perform a 180-degree rotation around vector
,
, in addition to the previous rotation:
. It is to be noted that this product is commutative, in contrast to the general case. As a result, vectors
,
and
(
20) are transformed by such rotation into vectors
,
and
that leads to the equalities
and
. Given that angle
between vector
and the fixed vertical axis
y shown in
Figure 5, which is equal to
for vector
, becomes equal to
, we conclude that detwinning process for
begins at the same
as is given in
Table 2 for angle
and is carried out in accordance with the first case indicated in this table. The magnetization curves will be exactly the same as for angle
.
Finally, we will perform a 180-degree rotation only around the
axis:
. Of course, this rotation is a 180-degree rotation around vector
in addition to the previous rotation
. vectors
,
and
(
20) are transformed by such rotation into vectors
,
, and
that leads to the equalities
and
. Due to such rotation, angle
between vector
and fixed vertical axis
y shown in
Figure 5, which is equal to
for vector
, becomes equal to
. With this in mind and considering the results of
Section 3, we conclude that the detwinning process for
begins at the same
as is given in
Table 2 for angle
, but, unlike the first case, it will be carried out in accordance with the second case discussed in
Section 3. The magnetization curves will be exactly the same as for angle
.
Let us construct the average value of the projection of the magnetization on the axis along which the external magnetic field is directed:
where
S is the area of the considered domain.
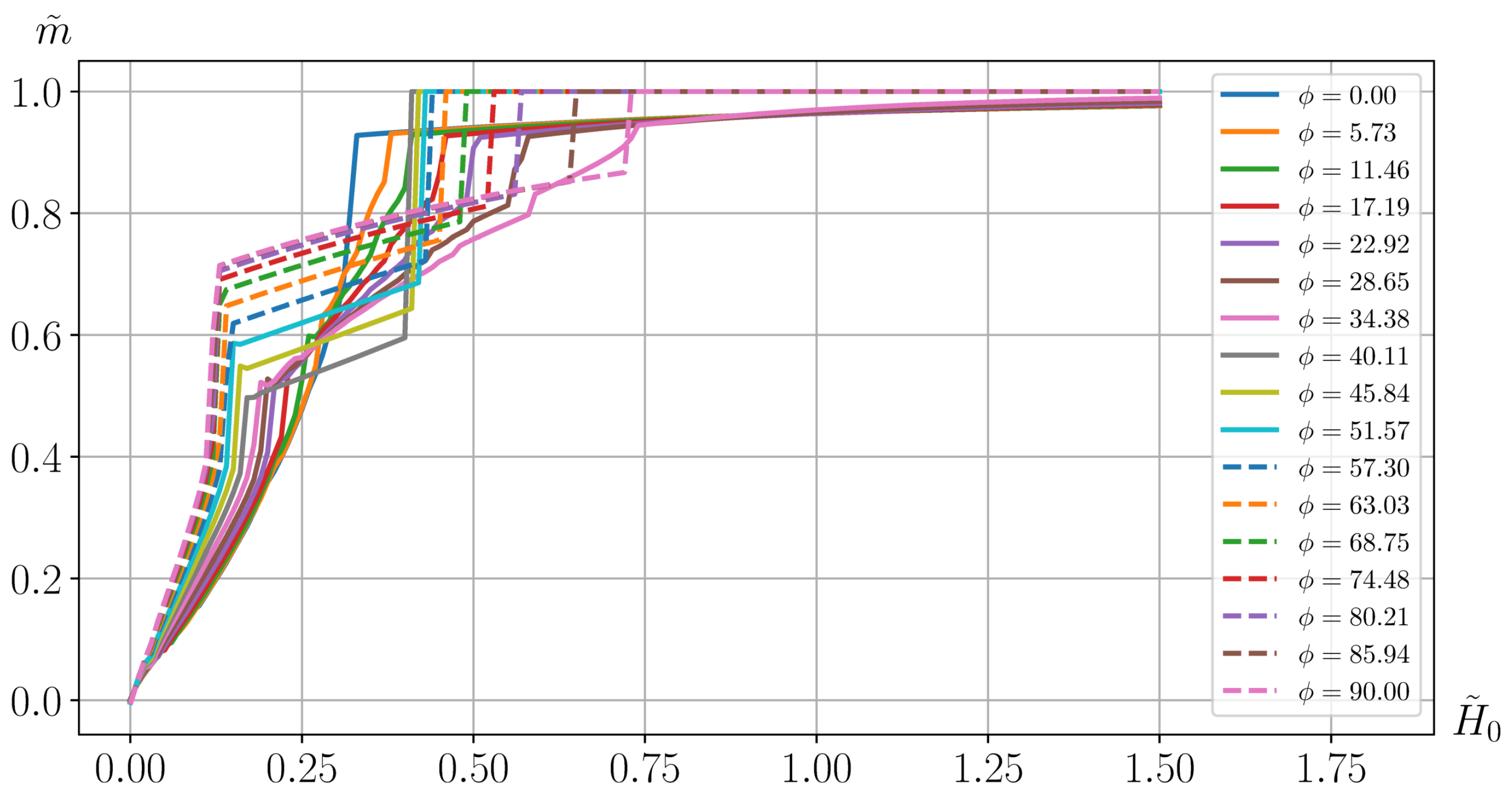
Figure 7 demonstrates the dependencies of
on the modulus
for different directions (angles
) of the external magnetic field application, taking into account possible detwinning. Five stages of the magnetization process are distinguished on each of the plotted curves. In the first stage, the 180-degree walls of the magnetic domains move proportionally to the applied magnetic field, and the magnetization depends linearly on this field. In the second stage, a jump in magnetization occurs due to a significant increase in the speed of the movement of these walls. At the third stage, these walls are annihilated in a critical field, the magnitude of which,
, is approximately 0.32 for an external field applied at angle
, or 0.17 at angle
, or 0.13 at angle
(see
Figure 5,
Figure 6 and
Figure 7 in [
20]), and the magnetization vectors begin to turn gradually, tending to align with the applied external magnetic field. At the fourth stage, which is observed only for
greater than 40°, detwinning occurs, and the magnetization increases sharply again as a jump. For the curves presented in
Figure 7, this takes place at the values of
given in
Table 2. At the last fifth stage, the magnetization reaches saturation. The magnetization curves obtained show essentially anisotropic magnetic properties in the twinned martensite of the Ni
2MnGa alloy. Thus, we have solved the magnetic part of Problem 3, formulated in
Section 4.2.
The detwinning process, which accompanies the magnetization process at certain values of angle
, leads to the occurrence of the structural deformation and can be realized as it has been shown, in accordance with two cases. Let us construct a deformed state for these cases. For detwinning process the strain tensor is given as
, where
or
is defined in basis
by the relations (
17) or (
18). Using Expressions (
17), this form can be concretized into an expression
, where
By taking
(see (
12)), we obtain
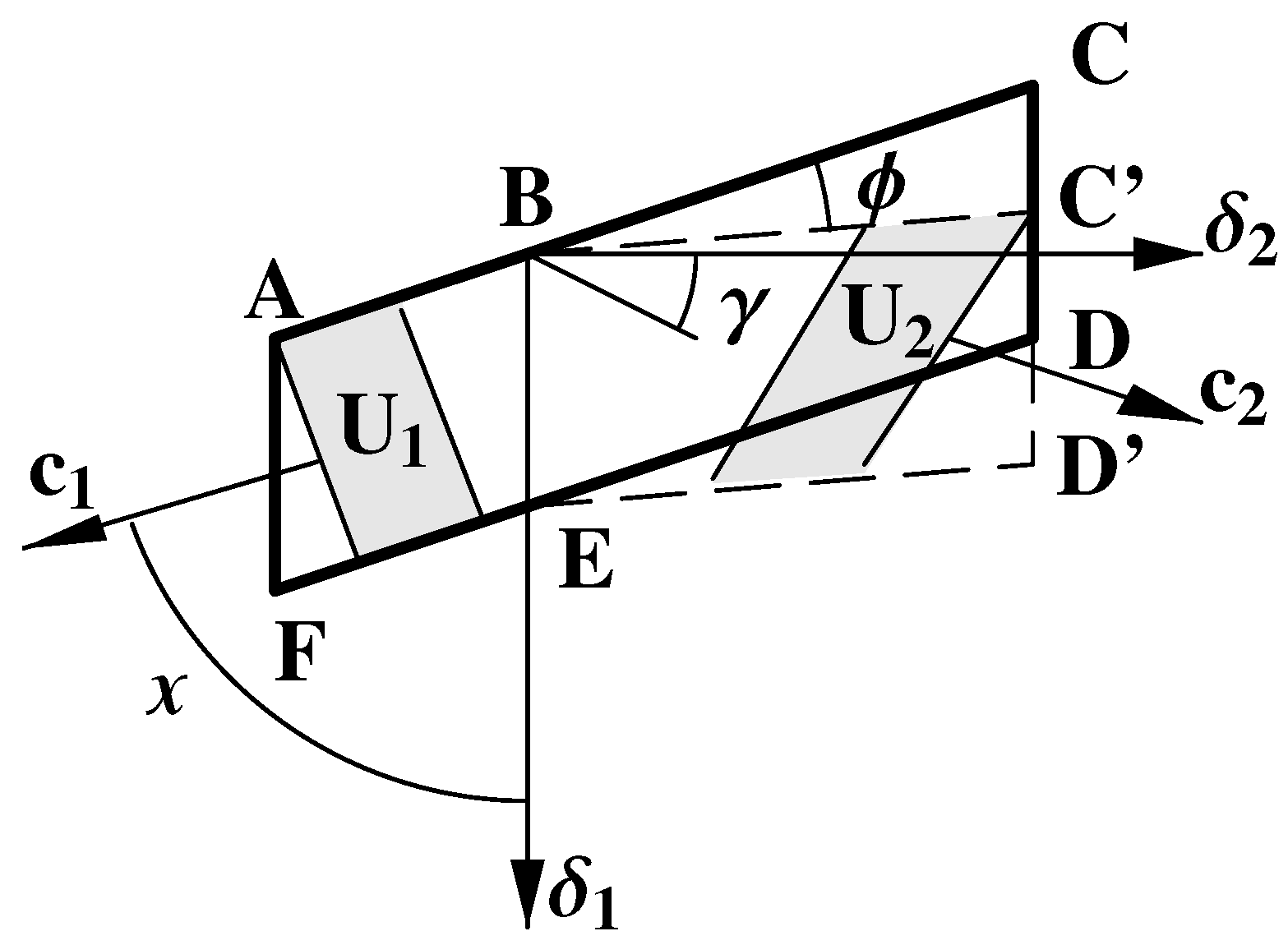
These results correspond to the actual behavior of the sample. Indeed, for the detwinning process corresponding to the first case, element
of twin
in
Figure 2 is converted to an element
, which is an extension of element
. As a result, the sample increases its size in the direction of element
(in the direction of vector
) and decreases in the normal direction (in the direction of element
or vector
). Therefore, the component
of the strain tensor is positive, and
is negative (see the first line in (
22)). For the detwinning process of the second case, element
of twin
in
Figure 2 is converted to element
, which is an extension of element
. As a result, the sample increases in size in the direction of element
(in the direction of vector
) and decreases in the normal direction (in the direction of element
or vector
). Therefore, the component
of the strain tensor is positive, and
is negative (see the second line in (
22)), unlike the previous case. The values of these strains fully agree with the experimental data (see [
33,
34]) both in the first and second cases.
Since the detwinning in these two cases is realized with a simple shift, this process should take place without changing the volume. The obtained values of the strain tensors components fully correspond to this statement. In addition, it turned out that the vectors , coinciding with both the axes of easy magnetization of the crystal and the axes of its anisotropy , were the principal axes of the twinning and detwinning deformation processes.
It should be emphasized that deformation (
22) occurs only if the conditions given in
Table 2 are fulfilled: each angle
, which determines the direction of the external magnetic field application on the calculated area, corresponds to the intensity of this field. If this intensity is less than that given in
Table 2, detwinning does not occur. With an account of the above-said, and based on the analysis performed immediately after
Table 2 for angle
varying from 90° to 360°, we rewrite (
22) as
where
, if
and
is the Heaviside’s function,
Having summarized the above, we can assert that the deformation part of Problem 3, formulated in
Section 4.2, has been solved.
5.2. A Polytwin Crystal
In the previous subsection, we have considered a monotwin crystal under the action of the external magnetic field applied at different angles in the
plane. Now fixing the direction of the external magnetic field and placing the computational domain shown in
Figure 3 at different angles to it, we will describe, using the curves in
Figure 7, the magnetization of this representative composite region, which models a polycrystal with a different arrangement of twins in the plane, and deformed state of a polycrystal arising as a result of the detwinning processes in single crystals. This will be the solution to Problem 4 formulated in
Section 4.2. With this approach, the commonly used structural models do not take into account the magnetic interaction, as well as the deformation interaction of these regions, and the question of these effects remains open.
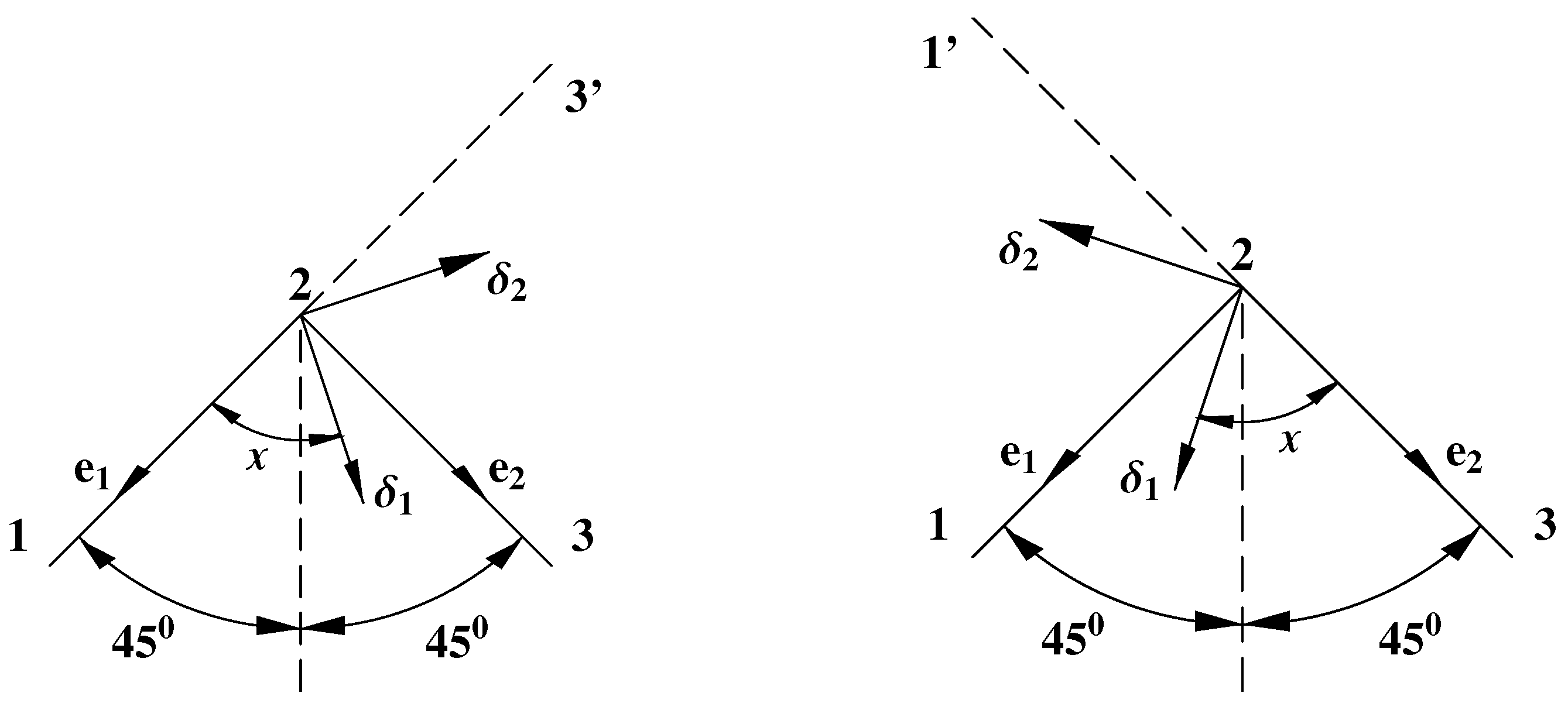
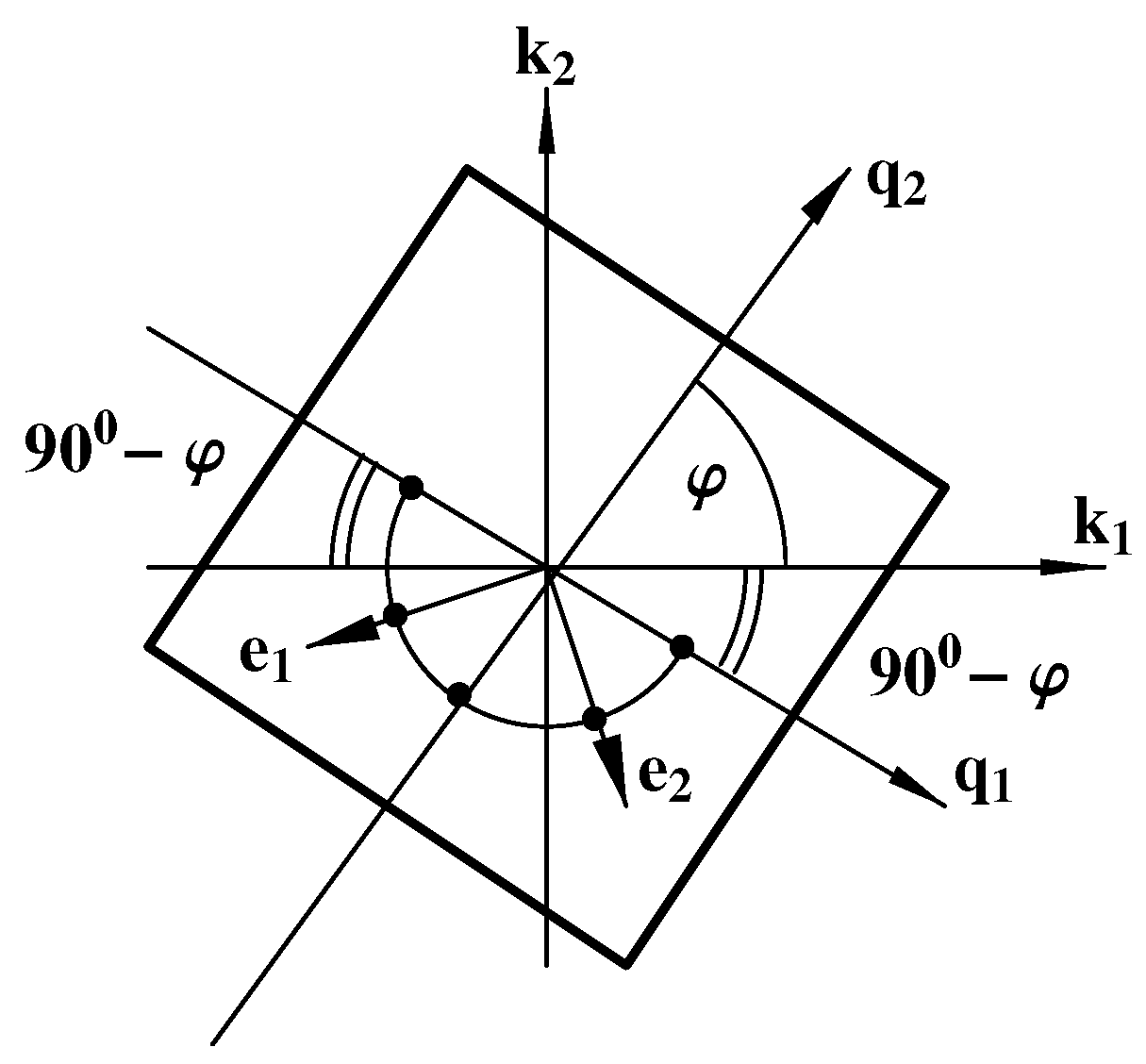
In order to specify the location of single crystals in a polycrystal, we introduce, in addition to the orthonormal coordinate systems
associated with single crystals, the general orthonormal coordinate system
associated with the polycrystal (see
Figure 8). The location of each single crystal in the polycrystal is determined by angle
between axis
of this single crystal and vector
of the coordinate system associated with the polycrystal common to all single crystals. The arcs between the black dots in
Figure 8 span equal angles of 45°.
To construct the magnetization curves for isotropic and anisotropic polycrystals, we use the following relation
where
is the values of magnetization that correspond to angle
, shown in
Figure 3 for the single crystal, at point
. angle
shown in
Figure 3 is defined through angle
shown in
Figure 8 using the relation
, where
is the angle between vector
and vector
and
is the angle between vector
and vector
. Angle
defines the position of the single crystal in a polycrystal, and
defines the direction of the vector of external magnetic field
with respect to the polycrystal. The Relation (
24) describes the effect of the magnetization of single crystals for the angles
belonging to the segment
on the magnetization of a polycrystal, which corresponds to the unit of angle
.
For an isotropic polycrystal relation (
24) takes the following form
It is easy to see that this expression remains valid for any choice of
. Let us choose any
from the closed segment
and make it fixed. Assuming that
, we get:
In this case, the Expression (
24) for an isotropic material is written as
and is a complete analog of Equation (
25). Since the established relation between (
25) and (
26) is valid for any
, Relation (
25) does not depend on
.
Let us go back to Expression (
24). Dividing the segment
into
n equal parts and supposing that
is constant on each of the parts, we obtain from (
24)
We consider three types of polycrystalline samples: isotropic polycrystal, texture-oriented polycrystal—structure 1 and texture-oriented polycrystal—structure 2.
It is assumed that an isotropic polycrystal consists of 17 twinned single crystals of the same volume located at angles
between axis
of the single crystals and vector
of the general coordinate system (see
Figure 8). The magnetization curves corresponding to these 17 positions are shown in
Figure 7 and are used to construct the magnetization curve for the isotropic polycrystal. Let us show that such a change in angle
is quite sufficient.
In connection with what has been said in the paragraphs following
Table 2,
We represent (
27) for an isotropic material as
where
in each sum varies from 0° to 90°. This expression takes into account a uniform distribution of the directions of the
vector of single crystals along a circle from 0° to 360°, which must be performed for an isotropic polycrystal. Then, in accordance with (
28), we have four identical sums in square brackets, and this expression eventually takes the following form for an isotropic material at value
given above:
and is the simplest when
:
Here
is the value of magnetization at the point
for the curve shown in
Figure 7 that corresponds to angle
, at which the external magnetic field acts on the calculated domain for the single crystal. We use Expression (
29) to construct the magnetization curve for the isotropic polycrystal shown in
Figure 9.
There is a predominant direction of the martensitic structure orientation for textured polycrystals. It is assumed that structure 1 consists of 3 twinned single crystals, and structure 2 consists of 5 twinned single crystals of the same volume. These twinned crystals are located at angles for structure 1 and for structure 2 between vectors of the twinned single crystals and of the general coordinate system.
Remark 2. This arrangement of twin crystals is not randomly chosen. The sets of single twin crystals differently located in space for structure 1 and structure 2 are grouped around the crystal whose angle φ is about 45°. This means that for this crystal, one element of the twin has axis directed against vector , and the other element of the twin has axis directed against vector (see Figure 8). If the external magnetic field is applied along axis and reaches the value of (see Table 2), this crystal shows a detwinning behavior and the element, which was directed along vector , will be directed along vector . As a result, the magnetization in this crystal in the direction of vector will increase in a jumpwise manner. In addition, as was shown above, the detwinning process causes in this crystal a structural strain, and in the direction of vector , its value is . The values of and are the control values of the magnetic and deformed behavior of structures 1 and 2 under the action of the external magnetic field in the direction of vector . Detwinning of other crystals in these structures under the action of the field in the same direction causes the same elongation as in the above case but in a direction other than . This, in accordance with (21), reduces the value of compared to the previous case, and the greater the difference of angle from 45°, the greater this decrease. As a result, the jump in the average value of magnetization determined by Relation (24) should be less for structure 2 compared to structure 1 since structure 2 is structure 1 extended using the two elements, which are the most distant from the element defined by the angle of 45°. The magnetization curve for the above anisotropic structures is described using the expression
where
for structure 1 and
for structure 2,
is the angle in the
plane between vectors
and
, and
is the values of magnetization at the point
for the curve shown in
Figure 7 that correspond to angle
, at which the external magnetic field acts on the computational domain for the single crystal. By applying an external magnetic field along the
vector (
) and in the direction of 45° to this axis (
), we construct curves for an anisotropic polycrystalline material with structures 1 and 2 (see
Figure 9).
Figure 9.
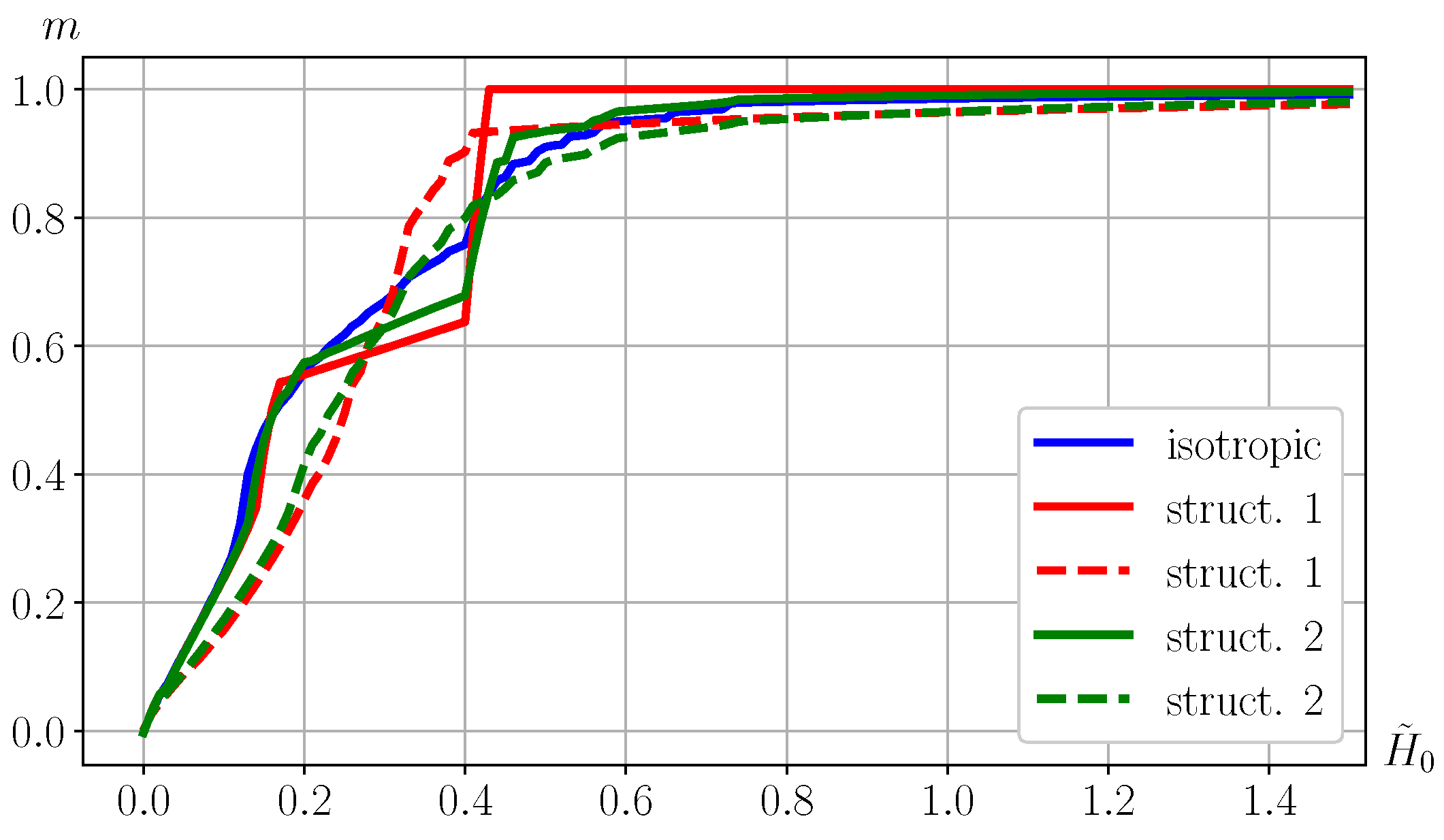
Magnetization curves for different polycrystals: isotropic and texture-oriented (structure 1 and structure 2). The solid lines show the magnetization curves for polycrystals when an external magnetic field is applied along the vector of these polycrystals. The dashed lines show the magnetization curves for textured polycrystals when a magnetic field is applied at an angle of to vector of these polycrystals.
Figure 9.
Magnetization curves for different polycrystals: isotropic and texture-oriented (structure 1 and structure 2). The solid lines show the magnetization curves for polycrystals when an external magnetic field is applied along the vector of these polycrystals. The dashed lines show the magnetization curves for textured polycrystals when a magnetic field is applied at an angle of to vector of these polycrystals.
The solid lines in
Figure 9 correspond to the magnetization curves for polycrystals when an external magnetic field is applied along the
vector of these polycrystals. The dashed lines correspond to the magnetization curves for textured polycrystals when a magnetic field is applied at an angle of 45° to vector
of these polycrystals (for an isotropic polycrystal, the magnetization curve completely coincides with the curve corresponding to the field acting along the
vector).
When the external magnetic field is applied along vector
(the solid lines), the curves for anisotropic structures 1 and 2 have jumps in the region
. Note that the jump for structure 1 is greater than the jump for structure 2. Such behavior is fully consistent with what was stated above in the
Remark given before
Figure 9. If, for structures 1 and 2, detwinning occurs simultaneously in all single crystals which form these structures, then in an isotropic material, detwinning occurs successively in single crystals with an increase of the external magnetic field since the intensity of this field is not enough for initiating simultaneous detwinning in all crystals. At a given time, detwinning occurs only in those crystals, the position of which and the relevant field strength satisfy the conditions of
Table 2. For this reason, the curve for an isotropic material in
Figure 9 (solid blue line) consists of a series of small jumps of magnetization in the interval
.
If an external magnetic field is applied at an angle of 45° to vector
, then, as will be shown below, detwinning does not occur in structures 1 and 2, and there are no jumps on the curves in
Figure 9 (dashed lines). The magnetization curves for these textured polycrystals differ depending on the direction of the applied magnetic field because such polycrystals are anisotropic.
Let us now define the deformed state that occurs in isotropic and anisotropic (structures 1 and 2) polycrystalline materials as the result of the detwinning process. As it has been stated at the end of the previous subsection, the deformations arising in the detwinning process are represented in basis
as
and have the following components (see (
23))
In the basis of polycrystal
(see
Figure 8), the tensor (
30) is represented as
and from the equality of tensors in (
30) and (
32) we conclude that
or, given that
for any case of detwinning process (see (
31)),
From
Figure 8 we have
and then expressions in (
33) take the following form
or, allowing for that
,
and considering (
31), we obtain
As explained earlier,
(see the explanation after the Relation (
24)).
The Relations (
34) allow us to construct the deformed state that occurs in an isotropic or anisotropic polycrystal during detwinning in single crystals. To do this, we use a relation similar to (
24),
Dividing the segment
into
n equal parts,
, supposing that
, calculating
at these points and assuming that it is constant on each such part, we obtain
The Expression (
36) is found to be more suitable for an anisotropic material.
For the isotropic material, we use the Relation (
35). Consider the cases when the external magnetic field of strength
and
is applied at the angles of
and
. Then, for
,
and in accordance with (
23) and the
Table 2 we have for
where, as it follows from
Table 2,
. With this in mind and substituting (
34) into (
35) we get
It is easy to show that each of the last three integrals with their signs is equal to the first integral. As a result,
Substituting the above values of angles in this expression, we find that at
and
,
and, as it follows from (
34),
. It also follows from (
34) that
is represented in the case under consideration as (
37), in which the sine is replaced by cosine and the minus sign is placed in front of the whole expression. It can be easily shown that the terms in the obtained expression are mutually eliminated at any
and
and, as a result,
.
Now, if
, then, in accordance with
Table 2, we have for
that
in the Expression (
37) for
and as a result,
. The increase in the modulus of these components with increasing the external magnetic field is explained by the involvement of additional regions in the detwinning process (see
Table 2). The expression for
, which is not quite correct in this case, can be readily converted, but due to the use of Relation (
37), there is no need to do this.
For
,
and in accordance with (
23) and the
Table 2 we have for
that
and
for all other
. Then, Equation (
35), in view of Relations (
34), is written for
as
It is easy to show that this equality can be represented as
or as
or given at last that
, as
As it follows from (
34),
and
is represented in the case under consideration as (
39) with the replacement of the sine by the cosine and the addition of the minus sign in front of the whole expression
This equality is reduced to
or, given that
, to
Relations (
40) and (
41) are the general expressions that define the components of the strain tensor for an isotropic shape memory material during detwinning. The magnitudes of these components depend both on the magnitude of the applied external magnetic field, which in accordance with
Table 2 determines the value of angle
, and on the direction of the field application (on angle
). As it follows from
Table 2,
when
and
when
. At the same time, angle
remains unchanged,
. When
Expression (
40) is similar to (
38) and from the Expression (
41) it follows that
as was noted earlier. Although the components of the strain tensor in the orthonormal basis
(see
Figure 8) depend on angle
between vectors
and
, in the orthonormal basis
, in which vector
is directed along vector
, these components remain unchanged. This can be easily shown by analogy with establishing the relationship between
and
in the Expressions (
30) and (
32). Therefore, such material is called isotropic.
Let us now consider the deformed state of an anisotropic material with a shape memory effect during its detwinning. We assume that twinned single crystals of the same volume are continuously distributed in a polycrystal at , and the external magnetic field is applied at angle . We will consider two special cases of textured polycrystals for which the magnetization curves have been already constructed: structure 1 for and , and structure 2 for and . For these two cases, we present an algorithm for determining the deformed state during the dissipation of twins (during detwinning) for the two angles of the application of an external magnetic field: and , and two : and . The deformed state during detwinning for any other case of anisotropy and the direction of action of the external magnetic field can be determined using this algorithm.
Let us analyze the deformation behavior of structure 1 at
,
and summarize the obtained findings. (1) Since
then
and
where
and
. (2) Such a change in
corresponds to the first line in (
23). As a result, we have
. (3) As it follows from
Table 2,
for
if
where the set
. Since for structure 1
where the set
then it follows from the intersection of the sets
U and
,
, that
and
. (4) As a result, we find from the Expressions (
34) and (
35) that
and for structure 1,
,
the detwinning strain tensor has the following components in the basis
(see
Figure 8):
.
Now, let us analyze the deformation behavior of structure 1 at , . Everything that is stated in item (1) of the previous case remains valid. In accordance with item (2) and with item (3) the set U for has the form . Since the set remains unchanged, then the set, which is the intersection of sets U and , remains unchanged, too. As a result, the angles and are the same as in the previous case, and with reference to item (4), we have the same components of the detwinning strain tensor as in the above case.
If the external magnetic field acts on structure 1 at angle
, then
will change, considering that
where the set
, in the interval
which corresponds to the first and fourth areas of change in
in the Expression (
23):
and
. Since
, if
, where
in the first area and
in the second area, then
in any of these cases and detwinning does not occur at any magnitude of the external magnetic field.
All of the above concerning the deformation behavior during the detwinning of structure 1 at
and
remains valid for structure 2 involving the replacement of the set
by the set
, where the set
is the set that describes structure 2. The consequence of the intersection of the sets
U and
(instead of
) are the values of the angles
and
, for which we eventually determine from the Expressions (
42) that
.
By performing analysis similar to that made for structure 1 at and , and also at , we obtain similar results for structure 2: at and , the deformed state remains exactly the same as at and , and at , and detwinning does not occur.
The results of the performed deformation analysis are presented in
Table 3. Here
is the average tensile strain of the considered structure in the direction of vector
(see
Figure 8) caused by the detwinning process (for an isotropic material, this vector can have any direction). As it follows from this table, the detwinning of an isotropic material occurs sequentially and is determined by an increase in the strength of the applied external magnetic field. In structures 1 and 2, complete detwinning occurs already at
, when the field is applied along vector
, and the value of
for the first structure is greater than that of the second one. When the field is applied at the angle of
to vector
, the detwinning does not occur at any external field strength.
The results of the deformation analysis are consistent with the explanations given above in the
Remark and when discussing the curves in
Figure 9.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}