1. Introduction
Apple is the third largest fruit crop in the world. The plantation area of apples in China is about two million hectares, the output ranks first in the world, and both the production and consumption scales constitute more than 50% of the world numbers [
1,
2]. In order to improve the ventilation and light transmission of the tree crown and improve the fruit quality, the fruit trees in the new apple orchard are mainly dwarf and spindle trees [
3]. The development of the fruit tree industry should be accompanied by the top-level design of combining agricultural big data and market analysis. Rapid detection of apple yield can support the decisions of orchard management in terms of labor demand, storage, transportation and marketing, which is of great significance in regulating the relationship between market supply and demand, and the economic benefits of fruit farmers. The unmanned rapid detection of apple yield also has broad application prospects in future unmanned farms. The visual recognition of apples is the most intuitive and effective means to achieve rapid yield detection. The growth status and the number of fruits of each fruit tree are different. Therefore, to achieve a higher yield detection accuracy, yield detection should be carried out for each fruit tree. The corresponding yield of each tree corresponds to the growth and development of the fruit tree. The yield map established by this yield prediction method can provide a reference for the next year’s fruit tree cultivation plan. Due to the large number of fruit trees in the orchard, yield detection needs higher detection efficiency. The apple detection model with fast reasoning speed, high precision and small size can achieve a higher apple yield detection speed, and is more suitable for running in different embedded devices.
The visual recognition algorithm of fruit has always been the key subject of rapid detection of fruit yield research. Several local and international researchers have developed various detection algorithms for the recognition of different types of fruits, including tomatoes [
4,
5,
6,
7], grapes [
8,
9,
10,
11,
12], lychee [
13,
14,
15], apples [
16,
17,
18], and so on. Early target fruit detection methods mainly relied on traditional image processing or machine learning methods to identify fruit according to its color, shape, texture, and other features [
2]. For instance, Yu et al. [
13] used color and texture features to train the random forest binary classification model to identify litchi fruit, and the proposed method achieved a recognition accuracy rate of 89.92% for the green litchi and 94.50% for red litchi. In addition, Syazwani et al. [
19] demonstrated good fruit counting performance using ANN-GDX (Artificial Neural Network, Variable Learning Rate Backpropagation) classification to detect pineapple crown images, with an accuracy of 94.4%. As for Fu et al. [
20], they worked on the combined HOG and LBP (Oriented Gradient and Local Binary Pattern) texture feature while using the SVM (Support Vector Machine) classification algorithm, and they reached an 89.63% average scale detection rate for bananas and an average detection time of 1.325 s, where the shortest detection time was 0.343 s. To sum up and refer to the different studies, the feature-based image processing method has slow detection speed, low accuracy, and poor adaptability to the extreme lighting environment in the orchard.
CNN (Convolutional Neural Networks), i.e., deep learning models, can automatically extract image target features, realize automatic target recognition, and significantly improve the adaptability of model recognition [
21]. The deep learning target detection method can be divided into two different types: the two-stage target detection algorithm and the single-stage target detection algorithm.
The two-stage target detection algorithm includes R-CNN (Regions with CNN features), SPP (Spatial Pyramid Pooling), Fast R-CNN (Fast Region-based Convolutional Network method), etc., and contains two network branches: RPN (Region Proposal Network) branch and the classification branch. The RPN proposes an ROI (Region of Interest) for the foreground class, while the classification branch classifies and estimates the bounding box of each ROI [
22]. For instance, Wan et al. [
23] proposed an improved Faster R-CNN framework for a multi-category fruit detection system. The average precision of the display category was 90.72%, and the detection time of each image was 58 ms. In addition, Chu et al. [
24] developed an improved Mask R-CNN for apple detection, which integrated the suppression feature into the standard Mask R-CNN to suppress the non-apple features generated by the original network; the obtained results showed an F1-score of 0.905, along with a detection time of 0.25 s per frame. To sum up, the two-stage target detection method has a high detection accuracy, but its detection speed is slow when the model size is large, which is not conducive to implementing it into embedded devices.
As for the single-stage target detection algorithm, it includes the YOLO (You Only Look Once) series and the SSD (Single-Shot MultiBox Detector) model. Compared to the two-stage target detection method, the detection speed and accuracy are better balanced, and the overall performance of the model is improved. For example, Zhao et al. [
25] detected apples, in complex environments and based on YOLOv3, with an accuracy rate of 97%, and the average detection time of a single image on the GPU device was 16.69 ms. As for Wang et al. [
26], they performed channel pruning and fine-tuning on YOLOv5s; the obtained results yielded an apple detection accuracy equal to 95.8%, an F1-score of 91.5%, and an average detection time per image of 8 ms. In addition, Guan et al. [
6] used YOLOv5 to detect a single frame of tomatoes, with an average recognition time of 104 ms; however, Zhou et al. [
27] used YOLOv3 for strawberry ripeness classification with a mAP (Mean Average Precision) of 0.89, and the highest obtained classification AP (Average Precision) for fully ripe fruit was 0.94.
In addition, for the single-stage target detection algorithm, the introduction of the attention mechanism is beneficial to further improve the accuracy of detection. For instance, Li et al. [
10] added the SE (Squeeze and Excitation) module to the YOLOv4-tiny network and proposed the YOLO-Grape algorithm. The obtained results, at the level of the category average precision mAP, showed an increase of 7.48% compared to the YOLOv4-tiny method. Ning et al. [
28] added the CBAM (Convolutional Block Attention Module) method to the YOLOv4 (You Only Look Once version 4) algorithm, which led to an improvement in the accuracy of 2.21%. Adding an attention mechanism to the single-stage target detection network can effectively enhance the ability of the network to extract target features, thereby improving the detection accuracy of the model.
Dwarf and spindle- shaped tree leaves have low density. This reduces the number of apples hidden in the crown that cannot be detected. In addition, there are many apples that are blocked by leaves, apples, branches, etc., where the illumination is uneven, and the background is complex. The traditional image detection algorithm has had difficulty meeting the demand, so this paper adopts the depth learning algorithm. During fruit coloring, to obtain more evenly colored apples, some Chinese apple growers will use reflective film to cover the ground between tree rows, resulting in poor lighting conditions for image acquisition on the back-light of fruit trees. It is difficult for the naked eye to distinguish apples from the back-light side image obtained by the camera, which undoubtedly makes apple detection a great challenge for machine vision. In light of some of these situations, this study also improved the detection performance when the reflective film was covered between tree rows.
The above research does not focus on detection speed and model volume while improving detection accuracy. Therefore, this research proposes the YOLOv5-PRE (YOLOv5 Prediction) algorithm, which integrates the lightweight networks ShuffleNet V2 [
29] and GhostNet [
30], based on YOLOv5s, and introduces the CA (Coordinate Attention) [
31] and CBAM [
32] attention mechanism to improve the detection speed of the deep learning algorithm and reduce the model size.
To sum up, this paper is divided as follows: in
Section 2, the data collection, processing, the methodology of work and the different algorithms will be shown. The results and the discussion will be proposed in
Section 3 and finally, a conclusion summarizing the work and proposing some future ideas will be shown in
Section 4.
2. Materials and Methods
2.1. Data Collection
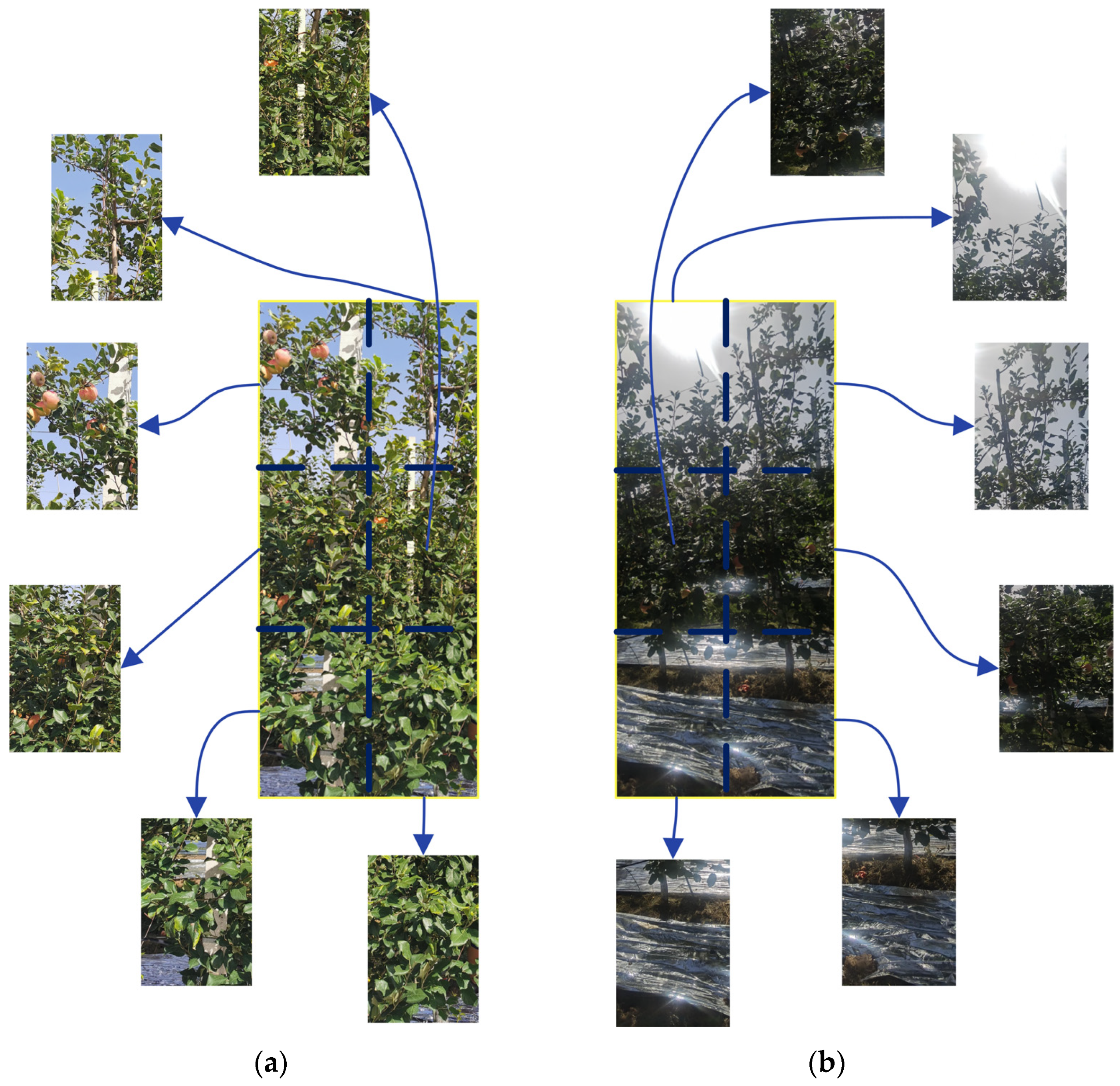
The original dataset was collected in 2021 in Yujia Orchard, Fengxiang County, Baoji City, Shaanxi Province (N 34°35′ E 107°23′). The orchard environment is shown in
Figure 1a. The fruit trees were dense and spindle-shaped, and there were several apple types, such as ‘Yuhua Fuji’, ‘Micui’, and ‘Yan Fu No. 6’. The acquisition method consisted of taking a picture from the mobile phone (SHARK PRS-A0) while being at a distance of about 2.5 m from the fruit tree, facing it, and using the wide-angle mode to include the entire fruit tree in the image. The process of taking an image is shown in
Figure 1b. In clear weather, 1200 images were considered in this study (three apple varieties each accounted for one-third), all being taken in the orchard, where half consisted of the front-light images and the other half referred to the back-light images, with an image size of 1844 × 3280 pixels. The collected image contained apples that were occluded by the current tree row, its branches, and its leaves. Different levels of occlusion exist. All apples in the current tree row, except for complete occlusion, need to be detected. Background lines being detected was avoided by marking only the current line.
2.2. Data Preprocessing
In this study, both front-light (
Figure 2a) and back-light images (
Figure 2b) were taken throughout the day in clear weather. A selection has been performed among the acquired images to make a dataset, where the images include mainly three aspects:
- -
fruits that are occluded at different degrees and under different light intensities;
- -
motion blurring;
- -
fruits in background tree rows.
One or more interference factors were included in each image to enhance the anti-interference ability of the YOLOv5-PRE algorithm model of this study.
The collected pictures (displayed in
Figure 2) were cut into six equally sized pictures, and those without apples were screened out. A total of 2400 pictures were kept, where 1200 pictures were backlit and 1200 were smooth pictures. Then, the division of the images into the dataset and a testing set with a ratio of 9 to 1 was performed; thus, among every 10 pictures, 9 were saved in the dataset and the last one was maintained just for testing purposes. The last phase consisted of using Makesense AI to manually mark the detection target and select the minimum circumscribed rectangle of the apple to specify the target apple and reduce the background pixels.
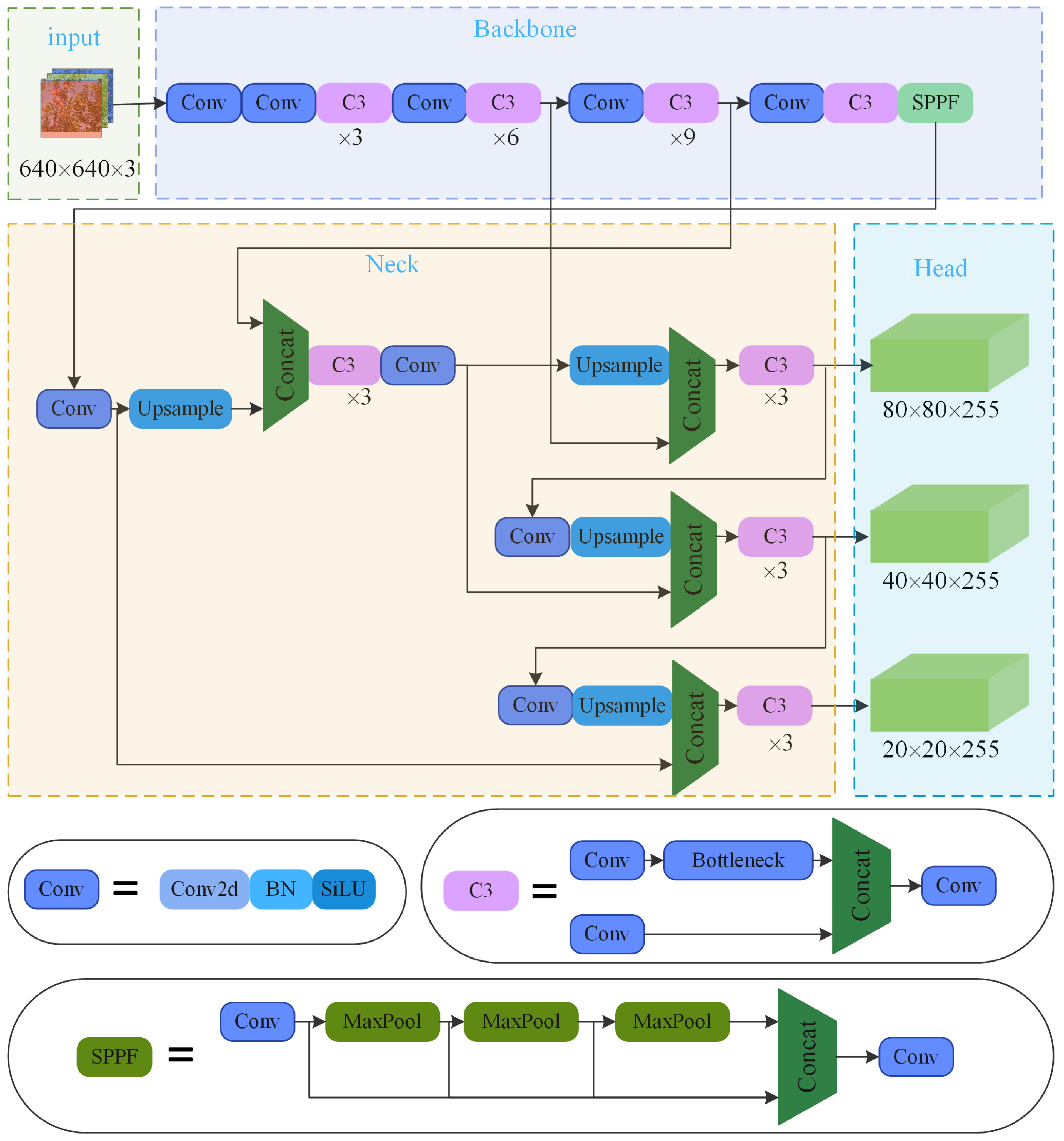
2.3. YOLOv5 Algorithm
YOLOv5 is an improved network of YOLO series, based on YOLOv4, and its performance has been greatly improved. YOLOv5 is divided into four types: YOLOv5s, yolov5m, yolov5l, and yolov5x, according to the size of the network model. In this study, YOLOv5s model was used to achieve the aim of detecting target apples in complex orchard environments. The YOLOv5s network structure consists of an input, a backbone network, and a neck. The model structure is displayed in
Figure 3. The different parts of the network structure are presented below:
(1) The backbone network part mainly included Conv (Standard Convolutional Layer), C3 (CSP Bottleneck with 3 Convolutions) and SPPF (Fast Spatial Pyramid Pooling) structures. In more detail, the Conv structure sequentially performs conv_2d (Two-Dimensional Convolution), BN (Batch Normalization), and SiLU (Sigmoid-Weighted Linear Unit) activation function operations on the input feature map. The C3 module contains three Conv structures and multiple Bottleneck modules for the extraction of residual features. After the SPPF module passes the input through the Conv operation, it performs multiple MaxPool (Maximum Pooling) operations with a convolution kernel of 5 × 5, which is used to extract and to aggregate the image features, and standardize the size of the feature images;
(2) The neck network uses the feature pyramid structure of the FPN (Feature Pyramid Network) and the PAN (Path Aggregation Network) to generate feature pyramids to adapt to target detection at different scales;
(3) The main body of the detection head part consists of three detectors, with three feature maps of different scales that are used to detect targets of different sizes.
Due to the presence of several layers and the different parameters of YOLOv5, no attention preference is reserved in the feature extraction process. In addition, the training time is long, the processor performance requirements are high, and the model size is large. All of these reasons mean that it is considered not conducive for being transplanted into embedded devices.
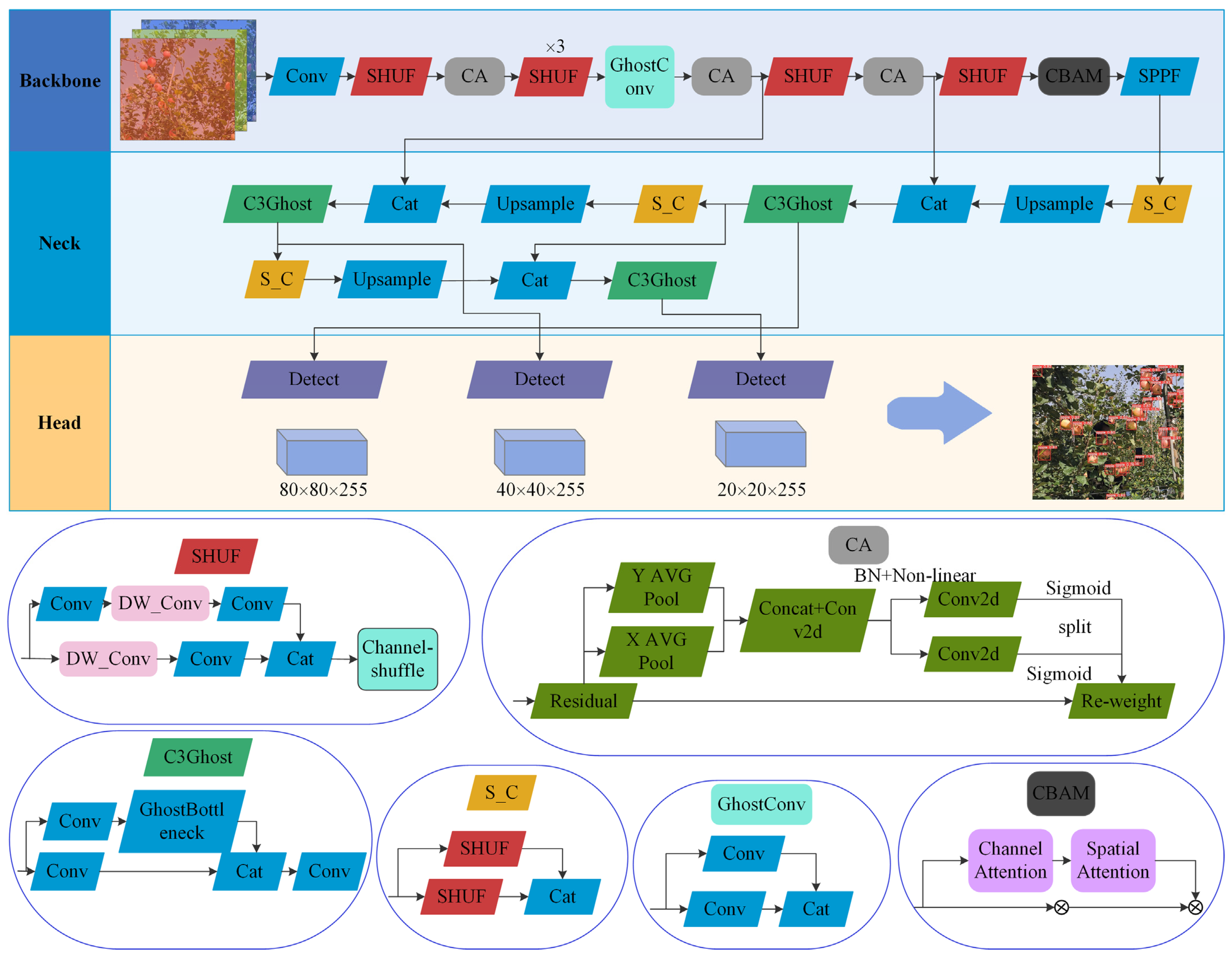
2.4. Improved Apple Detection Model
To improve the detection accuracy and the real-time detection speed, this study used ShuffleNet and GhostNet networks to improve the backbone and the neck networks of YOLOv5 and introduced CA and CBAM attention mechanisms to realize the lightweight design of the network model; thus, a YOLOv5-PRE was proposed. The apple detection model and the network structure are shown in
Figure 4.
YOLOv5-PRE removed all C3 modules in the backbone network, used lightweight SHUF (Shuffle) and GhostConv modules to replace the Conv modules except for the zeroth layer, and added CA and CBAM attention modules. In the bottleneck network, S_C (Shuffle_Conv) and C3Ghost were used to replace all Conv and C3 modules, respectively. The YOLOv5s-SG (YOLOv5s ShuffleNet GhostNet) model is a smaller version of the YOLOv5-PRE model that solely provided lightweight enhancements by eliminating the attention mechanisms CA and CBAM. YOLOv5-Shuffle only deleted all C3 modules in the trunk network, and used SHUF to replace Conv modules except for the zeroth layer, which is an intermediate product of the model change process. Below, the different stages of the apple detection model based on the lightweight improved YOLOv5s are listed:
(1) The SHUF module is a unit with a step size of 2 in ShuffleNet V2, which was used to replace some of the Conv modules, originally located in the backbone network. ShuffleNet V2, which is an efficient and lightweight network, is designed according to four principles. While keeping the same number of input and output channels, this method reduces the network branches and does not use them much. The convolution is applied without over-grouping and while reducing element-wise operations. As shown in
Figure 4, the SHUF module uses channel splitting, which can significantly reduce the number of parameters. However, channel splitting blocks the information flow between channel groups and reduces the channel information expression ability. To this end, a Channel-Shuffle (Channel Shuffling Mechanism) is designed to enhance the information association between channels;
(2) The S_C module borrowed the original GhostConv module and replaced the Conv in GhostConv with the SHUF module. GhostConv divides the input features into two branches to perform the convolution operations with the Conv module, and uses Concat to splice the features and output them. The GhostConv module generates more feature maps through simple operations. Based on a set of intrinsic feature maps, a series of linear transformations are used to generate many pseudo-feature maps that can fully reveal the information behind the intrinsic features. Based on the above, the two branches of the S_C module respectively process the input through the SHUF module and then splicing and outputting it. Through the channel splitting and shuffling mechanism in the SHUF module, the consumption of parameters and computation of resources is further reduced, compared to GhostConv method;
(3) The C3Ghost module is a fusion structure of the C3 module and the Ghost Conv module. The input is sent via one branch’s conventional convolution unit, while the input of the other branch is successively passed through procedures, such as depth-wise separable convolution, GhostConv convolution, and GhostConv convolution. The branch’s outcomes are combined and output;
(4) CA first divides the input feature map into width and height directions for global average pooling, and obtains the feature map regarding these two directions. The feature maps in the width and height directions of the global receptive field are spliced together, and then the features are sent to the convolution module with a convolution kernel of 1 × 1; thus, the input features are obtained after batch normalization and Sigmoid activation function. The graph’s attention weighs in the height and width directions. Finally, through the multiplication and the weighting calculation of the original feature map, the final feature map with attention weights in the width and height directions is obtained.
(5) The core idea of CBAM is to enhance the weight of the target features through the Channel_Attention and Spatial_Attention modules to achieve the effect of enhancing the detection accuracy.
The addition of the attention mechanism adopted two strategies; one is to place only one layer of attention module before the fast spatial pyramid pooling module of the backbone network; the other is to put it in each layer of the backbone network after the convolution module (SHUF, Group Conv).
3. Results and Discussion
3.1. Model Training
The workstation configuration parameters used in the test platform of this study are shown in
Table 1. The training process used adaptive anchor boxes to detect targets of different sizes. The initial training parameters were with the learning rate set to 0.01, the momentum factor equal to 0.937, the number of iterations equal to 300, and the batch-size set to 32.
3.2. Evaluation Indicators
This study used the AP (Average Precision), the P (Precision Rate), the R (Recall Rate), the inference time on GPU devices, the inference time on CPU devices, and the model volume as evaluation indicators.
The
P value represents the proportion of all predicted positive targets that are actually positive, and it is defined as follows:
The recall rate is the proportion of predicted positive samples among all targets that are actually positive samples. This value can be defined as follow:
In Equations (1) and (2), TP is the total number of target boxes for correctly identifying apples, whereas FP is the total number of target boxes for wrongly identifying apples, and FN is the total number of missed detections for apples.
In Equation (3), the average precision represents the area enclosed by the PR curve drawn by the precision rate and the recall rate, and the coordinate axis. This area shows the precision value of a single type of target:
3.3. Network Structure Ablation Experiment
To explore the effectiveness of this study upon the improvement of YOLOv5s and its impact on the detection rate, an ablation experiment was mounted on the YOLOv5-PRE network structure. The different backbone network structure models are shown in
Table 2. The neck network and the detection head of YOLOv5s-Shuffle are similar to the YOLOv5s algorithm. The neck network of YOLOv5-1, YOLOv5-2, YOLOv5-3, YOLOv5-4, YOLOv5-5, and YOLOv5-6 used the GhostConv module and C3 ghost module to replace Conv module and C3 module, respectively, and the detection head is similar to that of YOLOv5s. YOLOv5-PRE and YOLOv5s-Shuffle-Ghost used the S_C module and C3ghost module, respectively, to replace the Conv module and C3 module in the neck network, and the detection head is similar to YOLOv5s.
Training is shown in
Table 3, where the YOLOv5s-Shuffle algorithm had a large volume and low average precision. Due to the improvement of the neck network by YOLOv5-1 on the basis of YOLOv5s-Shuffle, the algorithm volume was greatly reduced, resulting in a decrease in the average precision. Based on YOLOv5-1, YOLOv5-2 added a layer of CA module after the SHUF module of the backbone network. The algorithm size was only increased by 9 KB, and the detection accuracy was improved by 0.02%. As for YOLOv5-3, it added a three-layer CA module to the backbone network of YOLOv5-1, and the average precision increased by 0.31%. To further improve the detection accuracy, a layer of CA module was added before the SPPF of the backbone network to obtain YOLOv5-4; however, the detection accuracy of the model decreased. Thus, a layer of CBAM attention module was added based on the YOLOv5-3 algorithm. In addition, the detection accuracy of the algorithm YOLOv5-5 had been further improved. Replacing one of the CA attention modules of YOLOv5-5 with a CBAM module yielded YOLOv5-6, which greatly reduced the detection accuracy of the YOLOv5-5 algorithm. Therefore, based on YOLOv5-5, the GhostConv module in the neck network of YOLOv5-5 was replaced by the S_C module that was proposed in this study, and the YOLOv5-PRE model was obtained. Based on YOLOv5-5, the algorithm volume was further reduced, while the average AP of the algorithm was greatly improved. All the attention modules in YOLOv5-PRE algorithm were removed, and the algorithm YOLOv5s-SG was obtained. The model volume of YOLOv5s-SG is the smallest among all the algorithms in this study.
3.4. Comparative Test
During the training process, YOLOv5-Shuffle, YOLOv5s-SG, YOLOv5-PRE, YOLOv5s-Ghost models, and YOLOv5s, converged when considering 300 epochs. The average precision curves of the five models are shown in
Figure 5, where they converged quickly. YOLOv5s has a faster growth rate than YOLOv5-PRE AP, but its training curve oscillates more in the first 50 rounds. In the last 100 rounds, the average precision of the YOLOv5-PRE algorithm is slightly higher than that of YOLOv5s, and the final training accuracy of the YOLOv5-PRE algorithm is highest, and the accuracy of the other algorithms is lower than that of YOLOv5s.
To verify the effect of the model size and the average precision of YOLOv5-PRE, the training results of the research algorithms YOLOv5-Shuffle, YOLOv5s-SG, YOLOv5-PRE, YOLOv5s and YOLOv5s-Ghost, under the same training set and test set, are shown in
Table 4.
YOLOv5s-Ghost reduced the algorithm volume by 46.04%, while the accuracy was only reduced by 0.04%; however, the algorithm inference speed was less improved on both GPU and CPU devices.
Data in
Table 4 shows that the YOLOv5-Shuffle algorithm has a smaller volume and a faster execution speed than the YOLOv5s model; however, compared to the performance of the YOLOv5-Ghost algorithm, the algorithm’s inference speed and accuracy are poor.
The YOLOv5s-SG algorithm obtained after lightning was 66.47%, which is smaller than the YOLOv5 model, and the inference speed was increased by 18.24% and 42.37% under GPU and CPU devices, respectively. As for the AP, it was reduced by 0.11%. Compared to YOLOv5 and YOLOv5-Ghost, the YOLOv5s-SG algorithm has a relatively larger reduction in the inference speed and the model size.
The YOLOv5-PRE algorithm with attention mechanism has improved the model accuracy obtained by YOLOv5s-SG, and the inference time under GPU and CPU devices have increased by 0.31% and 7.14%, respectively. Compared to the YOLOv5s algorithm, the volume of the YOLOv5-PRE algorithm is reduced by 65.72%, the AP has increased by 0.58%, and the precision rate has increased by 0.68%, but the recall rate has decreased. The detection speed has increased by 17.93% under the GPU device, and by 35.23% under the CPU device.
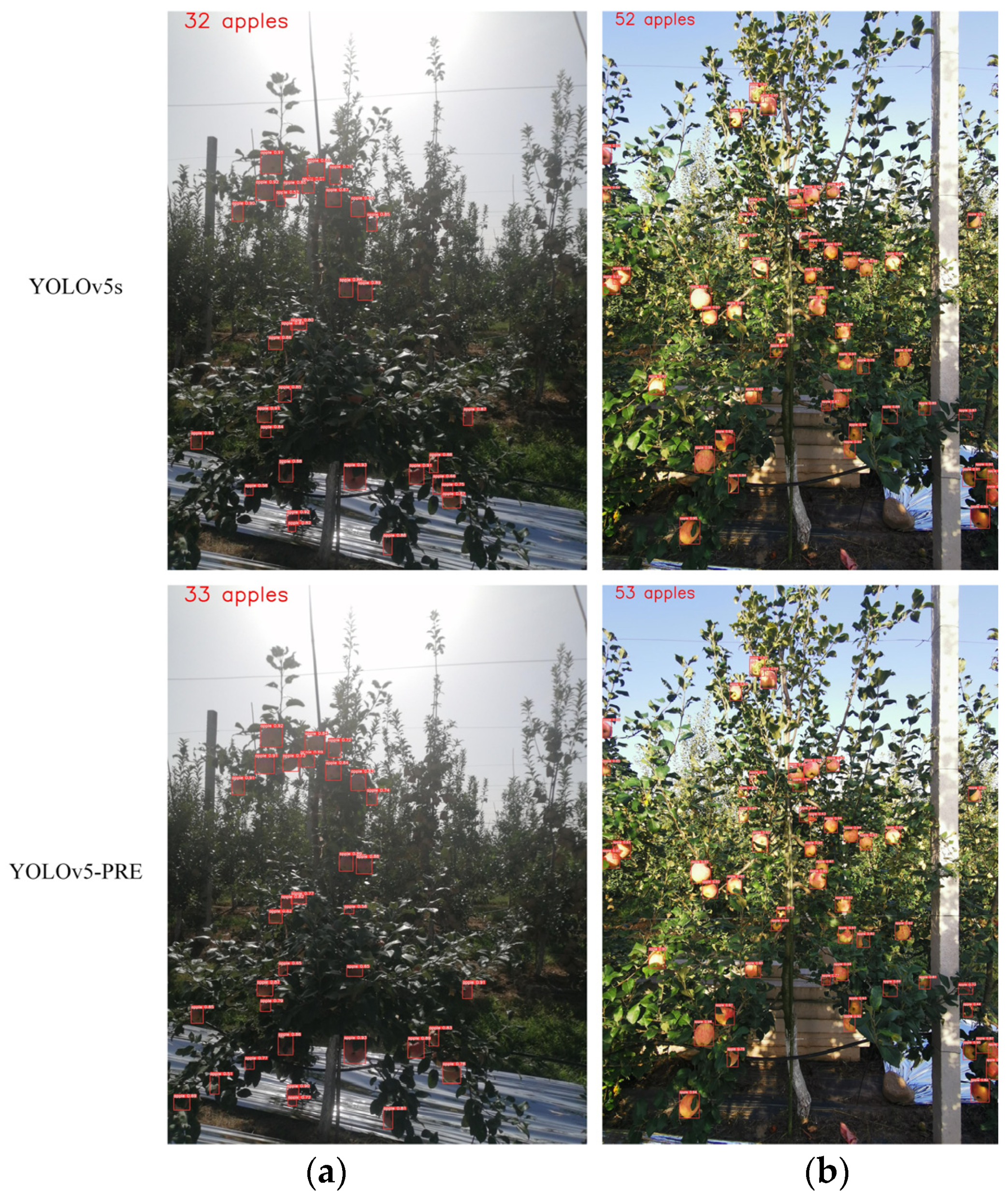
3.5. Comparison of Detection Effects
YOLOv5-PRE and YOLOv5s were used for the final weight model, after 300 rounds of training, to detect the front-light and back-light environment where the input image size was set to 600 × 600, the IoU (Intersection over Union) parameter was set to 0.2, the confidence level parameter was set to 0.4, the number of target statistics was placed in the upper left corner of the image; the comparison of detection effects is shown in
Figure 6.
As presented in
Table 5, YOLOv5s had a total of 118 targets in the front-light environment, 4 missed detections and 6 false detections. As for the back-light environment target, they were 99, the number of missed detections was 10, and the number of false detections was 2.
YOLOv5-PRE had a total of 117 targets in the forward light environment, 4 missed detections and 5 false positives. As for the back-light environment target, they were 102, the number of missed detections was 7, and the number of false positive detections was 2. Because the YOLOv5-PRE model has higher detection accuracy and higher probability values for the same target, compared with YOLOv5s, YOLOv5-PRE has fewer missed and false detections in a back-light environment. Thus, YOLOv5-PRE algorithm adapts well to different lighting conditions, and can detect fruits that are occluded by other fruits, branches, and leaves.
3.6. Feature Map Visualization of the Model
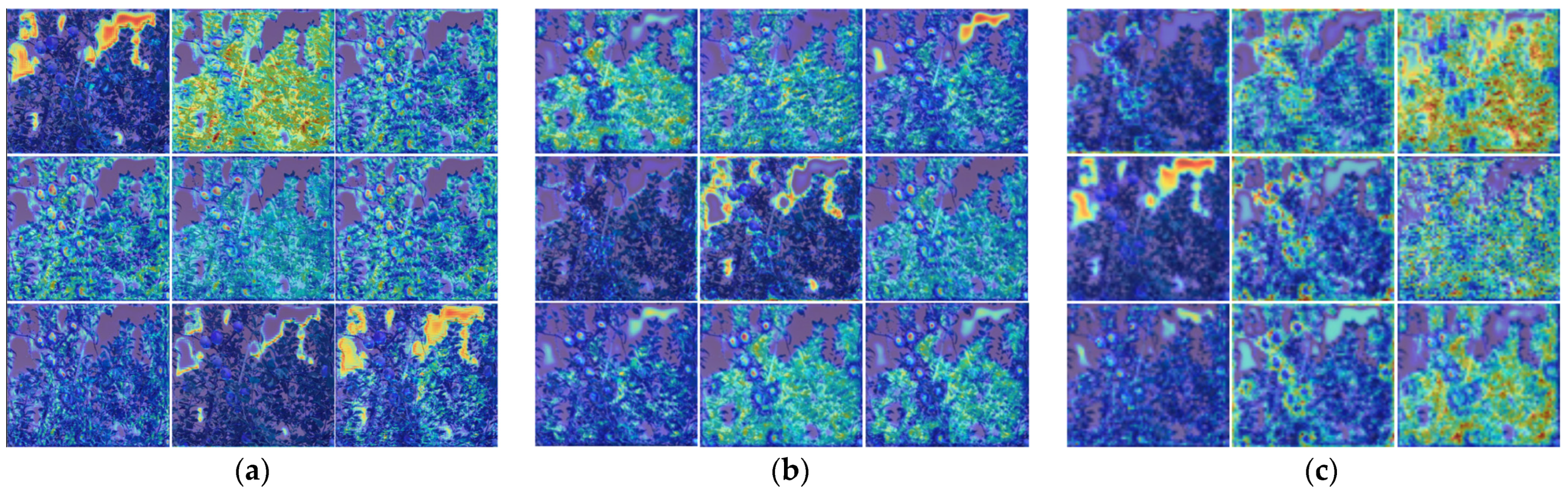
Since the deep learning target detection model is difficult to decompose into a single intuitive component, it is challenging to explain the link between the algorithm performance and the algorithm structure, only based on the input and output and model topology. To deeply analyze the segmentation process and the working principle of the YOLOv5-PRE algorithm, this study extracted the feature maps of the backbone network and the neck network, converted them into heat maps, superimposed the original images, and displayed them visually to intuitively display the YOLOv5-PRE algorithm. The feature map of the backbone network is shown in
Figure 7.
Referring to
Figure 7a,b, the shallow effect in the backbone network (the fifth and seventh layers of CA modules) carried out detailed feature extraction related to apples, leaves, tree trunks, and sky. The focus of the detection targets lying in contour, color, texture, and image segmentation was very clear. The feature map delivered by the SPPF module extracted the features of different categories of objects in the picture more accurately, but due to the small size and the reduced number of pixels in the picture, the extracted features were more blurred than those of the shallow network. It can be seen from
Figure 7c that, when extracting the overall features of apples, this part of the output feature extraction tended to pay attention to the unobstructed and darker parts of the target. Apart from the extraction of the overall features of the apple, the extraction of the contour features of the apple was also heavily weighted. Through contour feature extraction, the calculation amount of the feature extraction of the entire image can be reduced while ensuring the accuracy of the target detection.
The backbone network sent the extracted features to the neck network for further feature extraction and fusion, and the obtained feature map heatmap is shown in
Figure 8.
Referring to
Figure 8a, although the 18th layer of the network still considered the texture and the color of objects, such as apples, leaves, and sky, the region of interest had been narrowed down and was now focused on a particular location. Starting from the network layer 21 output (
Figure 8b), the network was more inclined to focus on the object’s contours. The output of layer 24 of the network (
Figure 8c) focused more on object outlines and background detection. Since the apple’s shape differs significantly from that of other background objects, paying close attention to it makes background filtering and removal easier.
4. Conclusions
Incorporating CA and CBAM attention techniques, ShuffleNet and GhostNet are lightweight networks built on YOLOv5s. A theoretical foundation for the continued use of deep learning algorithms in embedded devices is provided by the detection algorithm YOLOv5-PRE of the apple, which is appropriate for complex environments and significantly reduces the model size, speeds up detection and reasoning, and achieves better detection accuracy. The main conclusions of the study are:
(1) The average precision AP of the YOLOv5-PRE algorithm was 94.03%, which is 0.58% higher than that of YOLOv5s. While the model volume is reduced by 65.72%, the detection speed is increased by 17.93% on GPU devices and 35.23% on CPU devices.
(2) The YOLOv5-PRE algorithm has more obvious advantages in improving the detection speed in non-GPU devices, and is more suitable for running in embedded devices with poor performance. To improve the detection speed while lowering the requirements for detection accuracy, the YOLOv5s-SG algorithm, without the attention mechanism, can be selected; it is 42.37% faster than YOLOV5s on CPU devices, while the accuracy is only reduced by 0.11%.
(3) This study uses a visual feature heatmap to visually display the feature extraction process of the YOLOv5-PRE algorithm. The shallow feature network, in the backbone network part, extracts more image details due to the smaller receptive field. In the neck network, more attention is paid to the background and the outline of the object, which is conducive through the use of a lower computing power and a faster real-time detection speed to achieve higher detection accuracy. The visual feature heatmap is displayed graphically in the middle part of the model, as it improves its interpretability.
The YOLOv5-PRE algorithm proposed in this study provides a reference for the rapid detection of apple yield to detect apples in the orchard environment in real-time. It has broad application prospects in smart agriculture. Using the algorithm in this paper to generate a yield map in the process of yield detection, can show the different growth conditions of each tree, which can provide a reference for fruit tree cultivation in the next year. In the future, we will focus on improving the detection accuracy of the algorithm, while preserving the existing detection speed.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}