
Numerical and Experimental Investigation of the Effect of Micro Restriction Geometry on Gas Flows through a Micro Orifice


 , and
, and 
Abstract
:1. Introduction
2. Experimental Studies
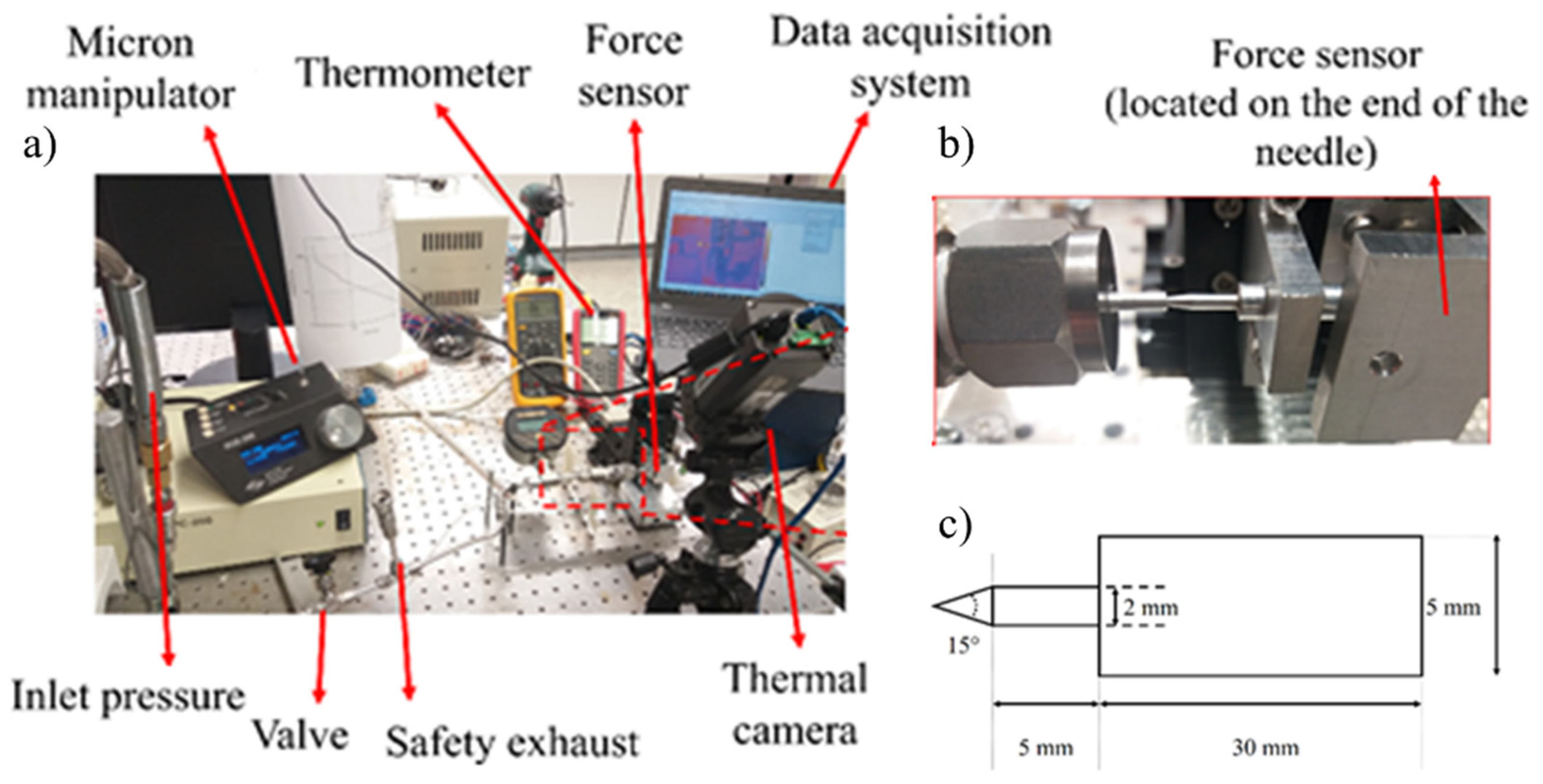
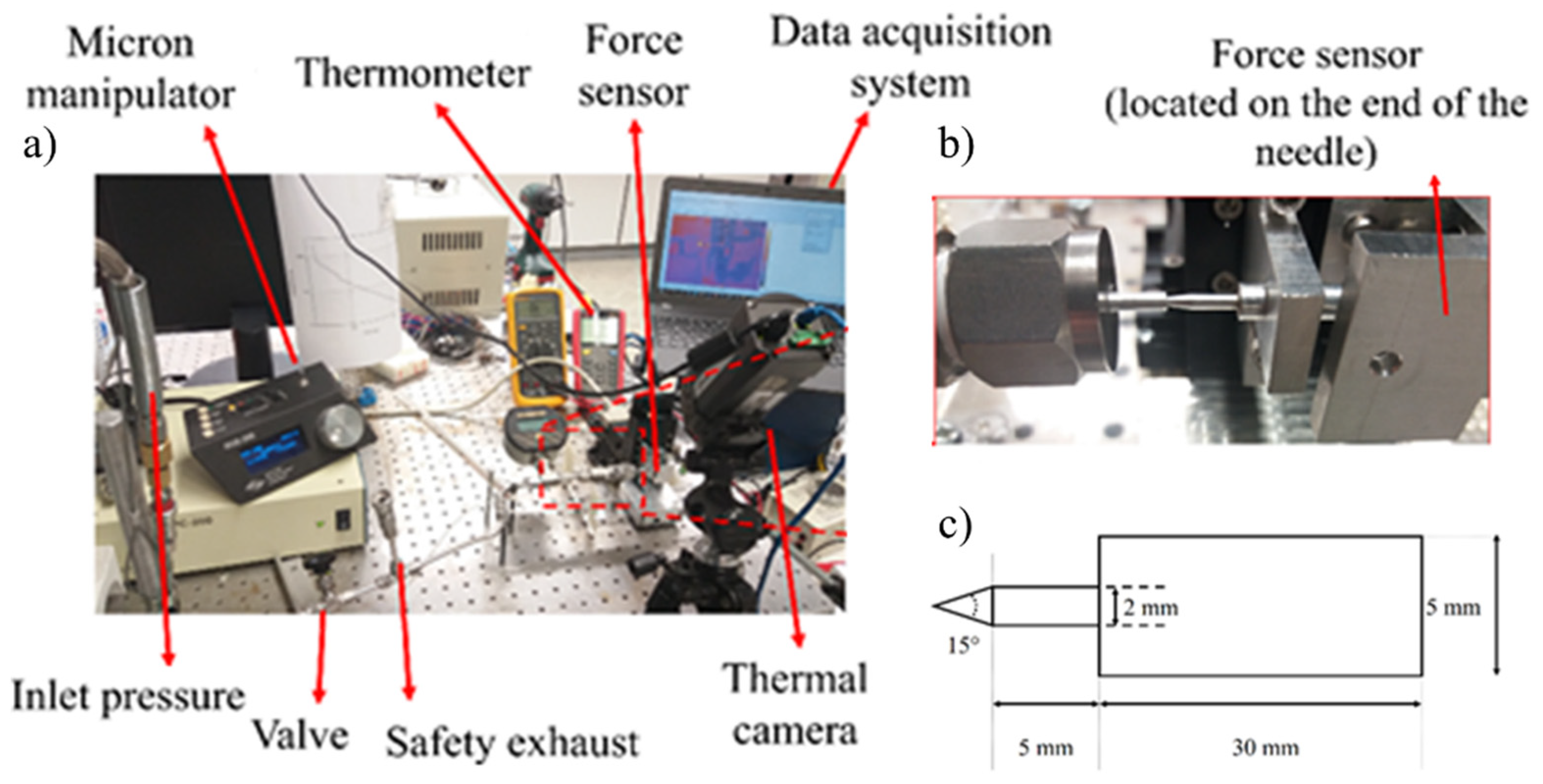
2.1. Experimental Setup and Components
2.2. Data Reduction
3. Computational Studies
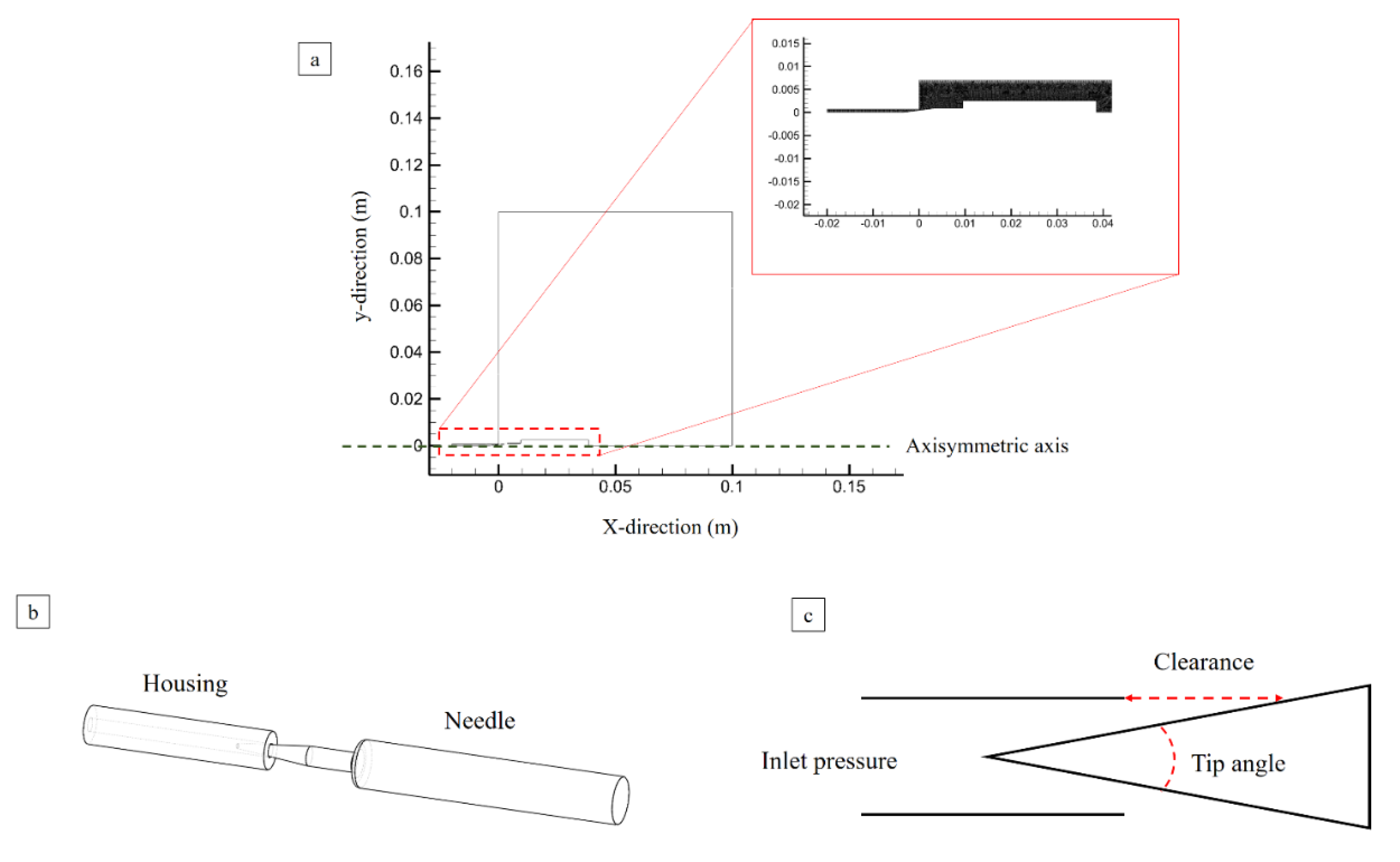
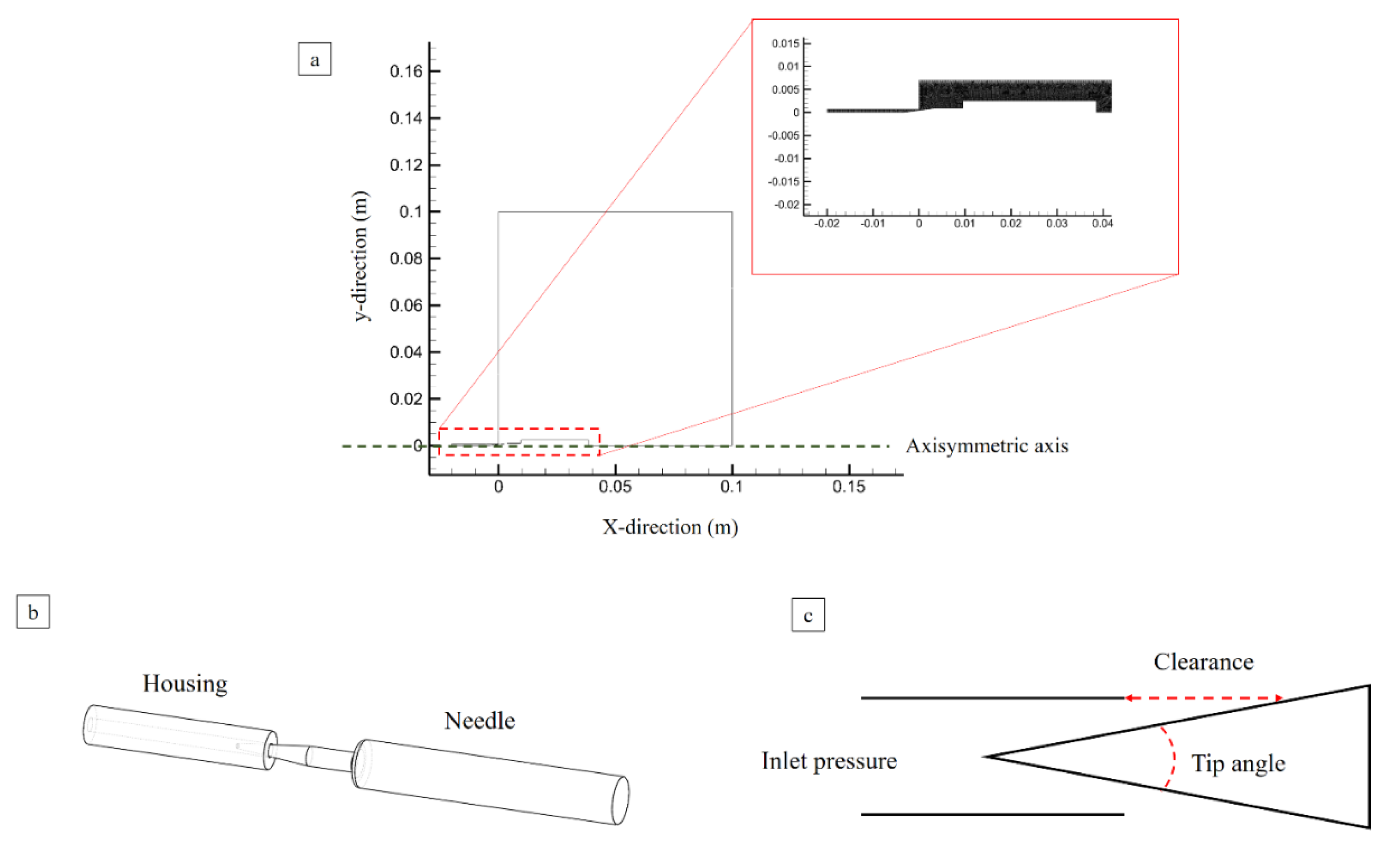
3.1. Computational
3.2. Numerical Analysis and Conservation Equations
3.3. Turbulence Models and Near Wall Treatments
3.4. Mesh Independency Analysis
4. Results and Discussion
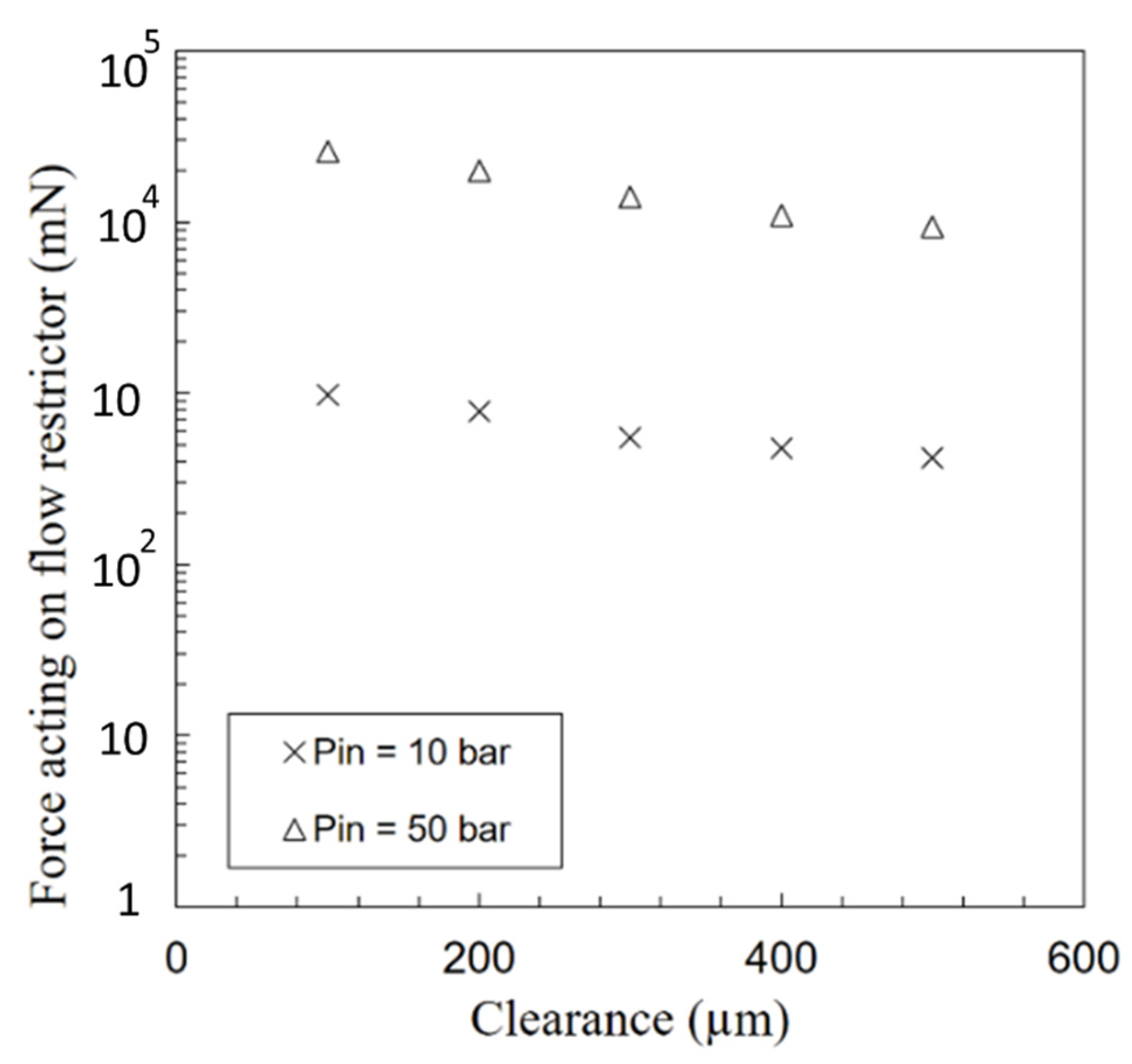
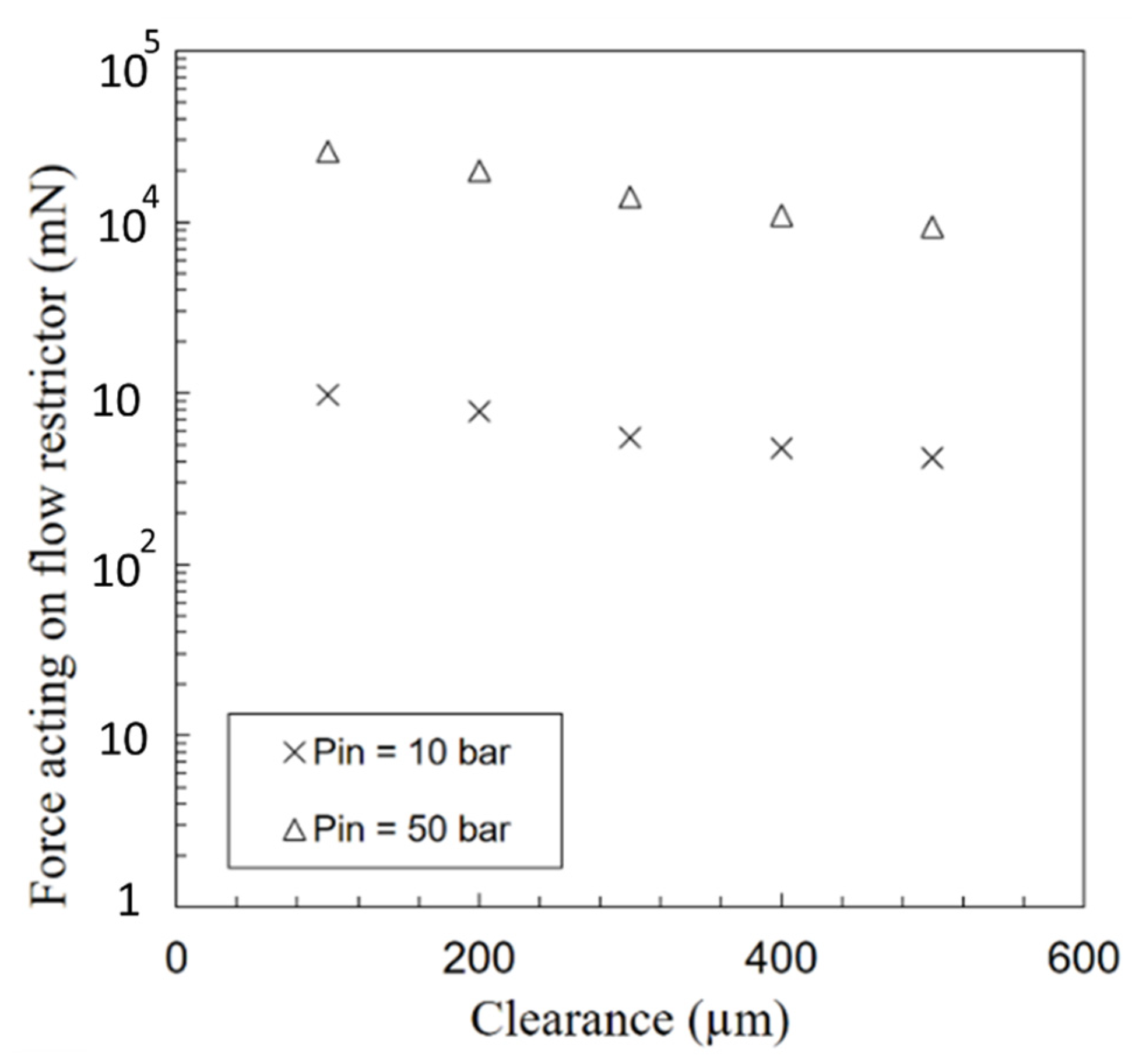
4.1. Experimental Force Analysis
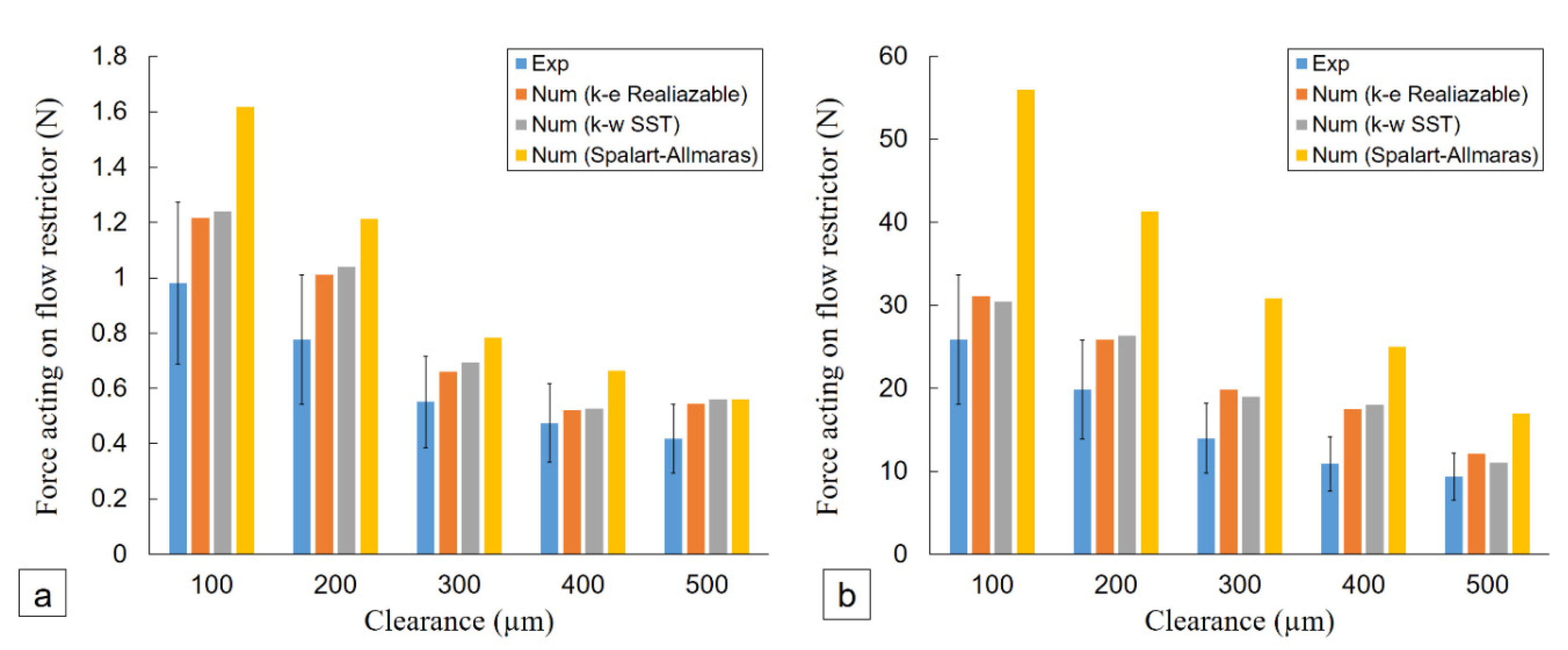
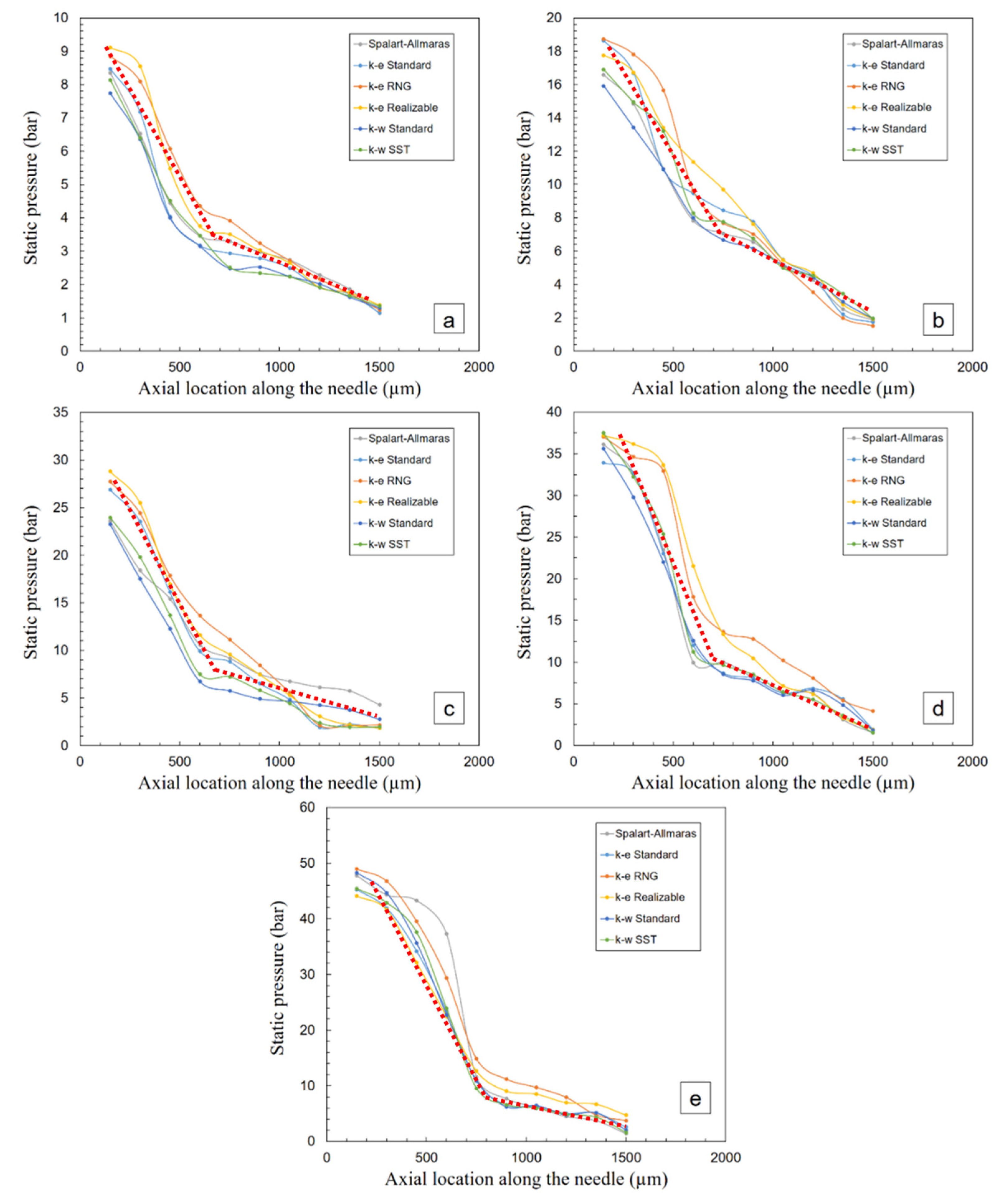
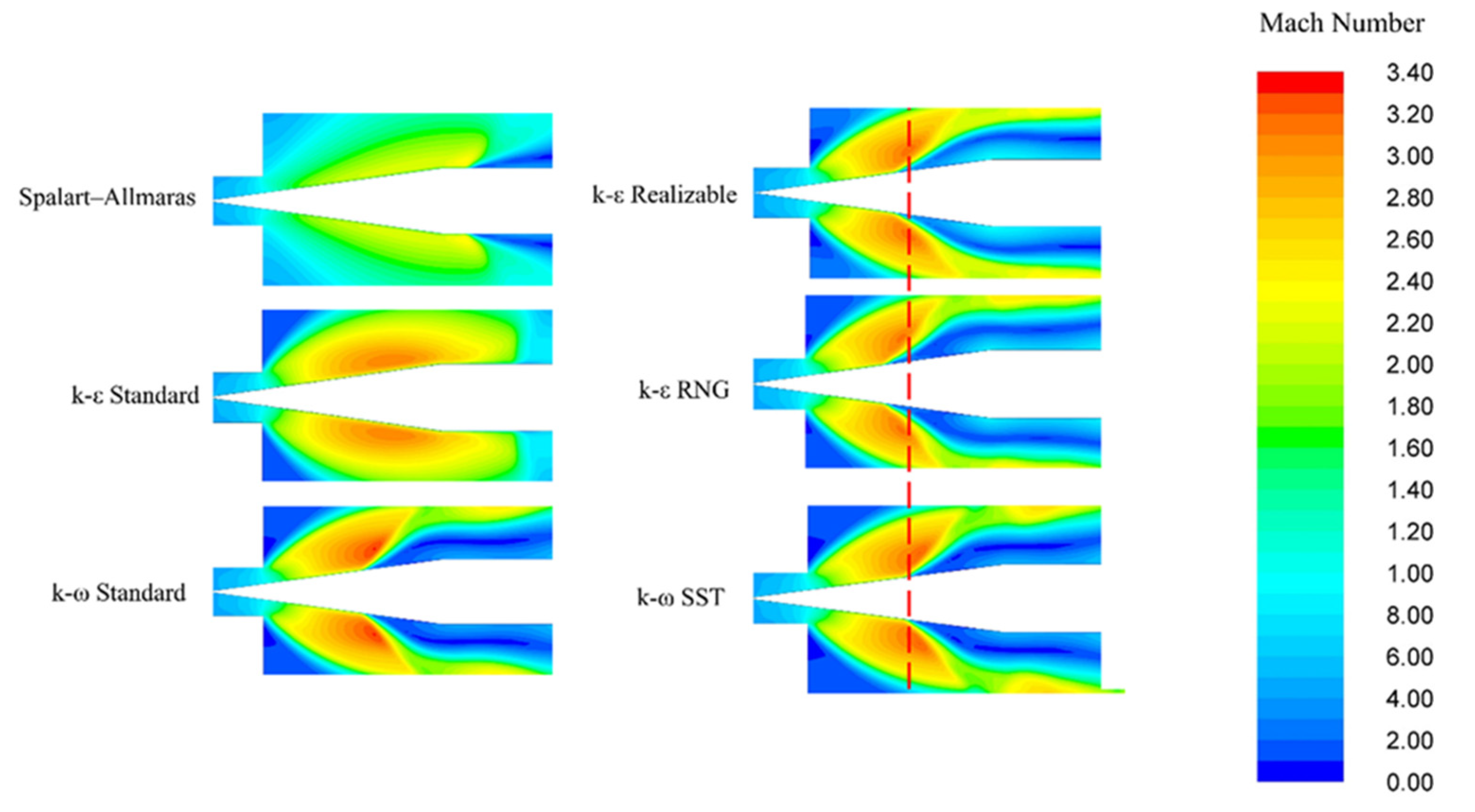
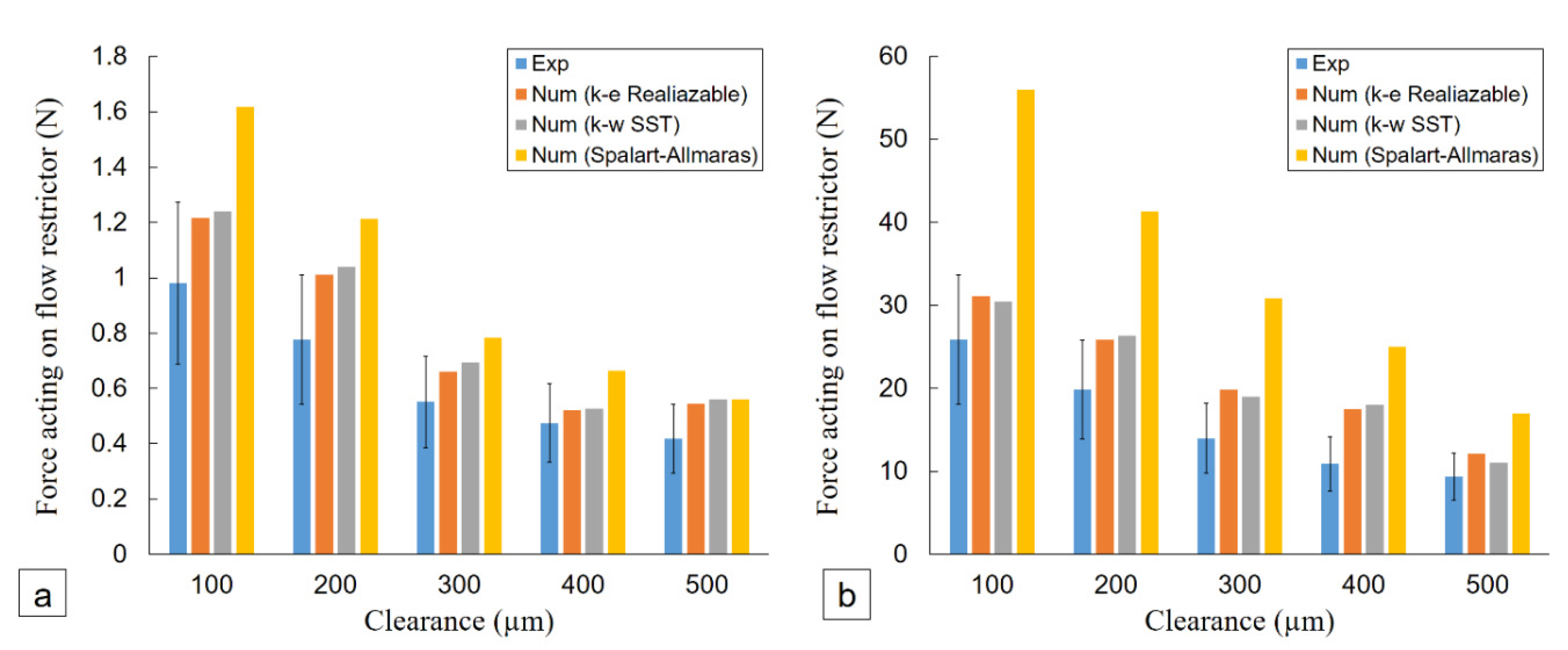
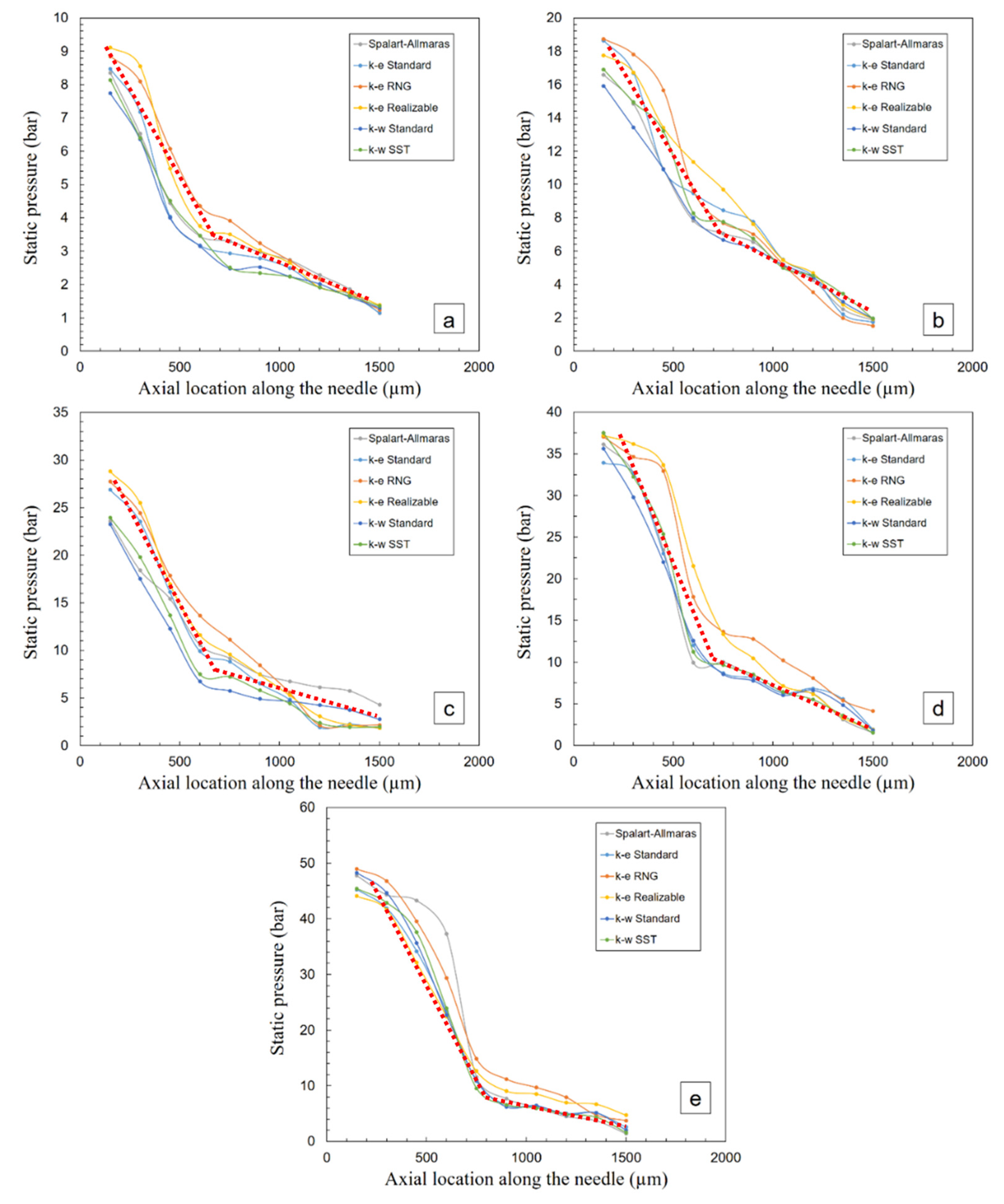
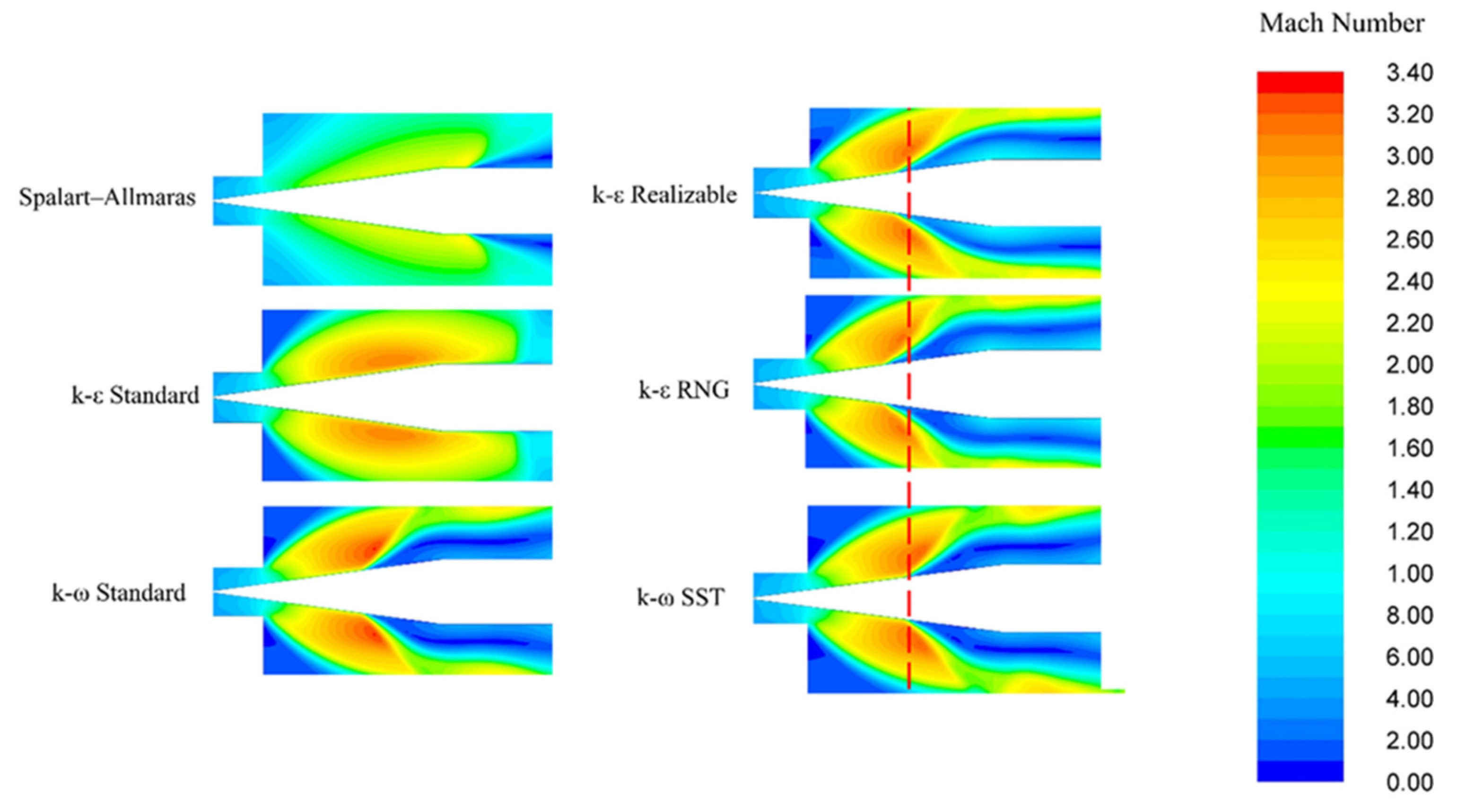
4.2. Turbulence Model Analysis
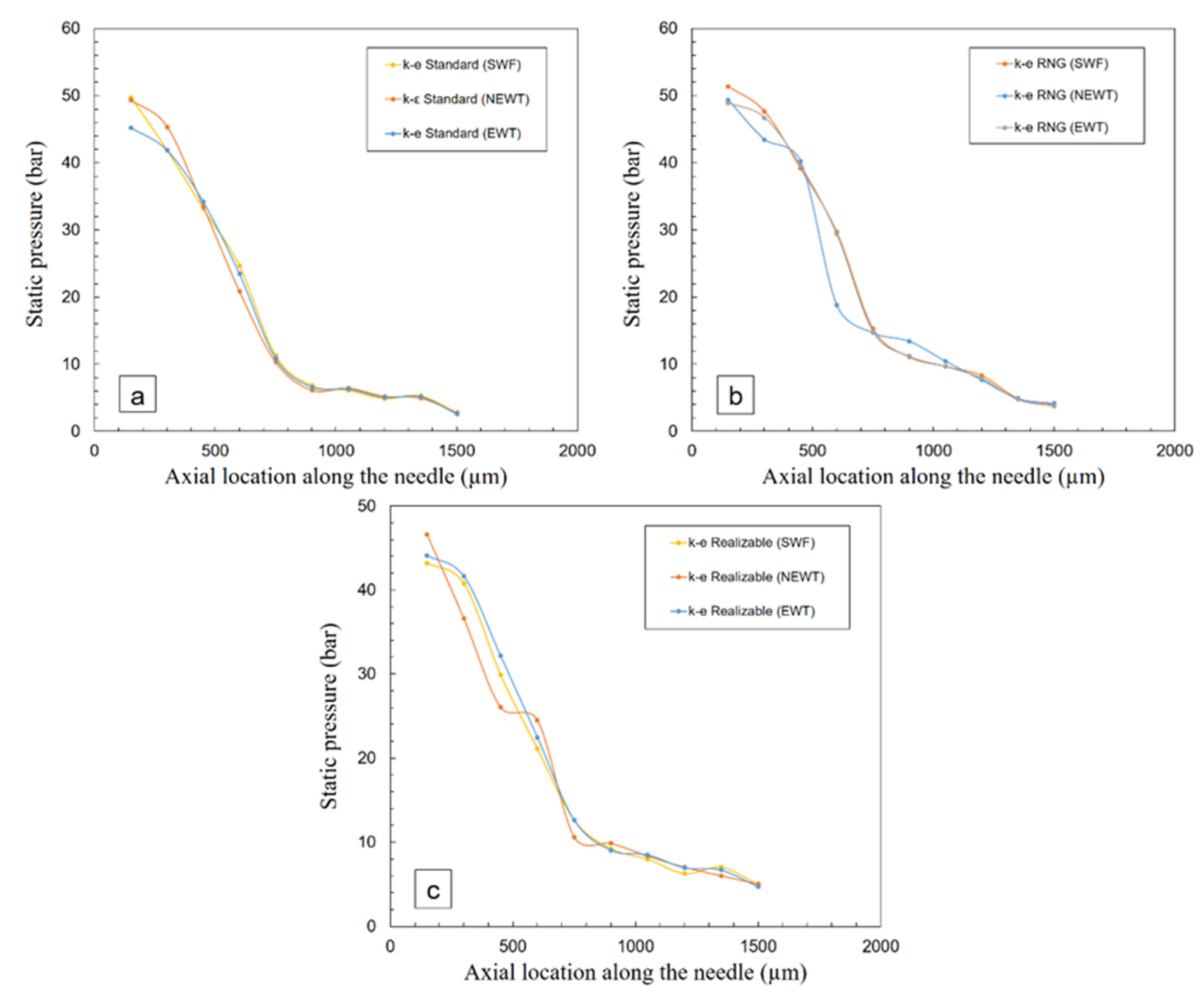
4.3. Effect of Wall Treatment
5. Conclusions
- (i).
- The exerted force on the needle shows a dramatic increase with the supplied pressure, while the exerted force decreases with the distance. Moreover, the cone angle of 15° provides a stable force for supplied pressures between 10 bar to 50 bar.
- (ii).
- According to the numerical results, the use of different turbulence models significantly affects the predicted results. While standard k–ε and Spalart-Allmaras models are not promising for predicting gas flow characteristics, the k–ε realizable model exhibits the best performance in predicting the results.
- (iii).
- Wall treatment studies reveal that the near-wall-treatment model has a considerable effect on the numerical predictions. Furthermore, the NEWF approach exhibits the worst performance among the other wall treatment approaches.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Joule, J.P.; Thomson, W. LXXVI. On the thermal effects experienced by air in rushing through small apertures. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1852, 4, 481–492. [Google Scholar] [CrossRef]
- Maytal, B.-Z.; Pfotenhauer, J.M. Miniature Joule-Thomson Cryocooling: Principles and Practice; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Damle, R.; Atrey, M. The cool-down behaviour of a miniature Joule–Thomson (J–T) cryocooler with distributed J–T effect and finite reservoir capacity. Cryogenics 2015, 71, 47–54. [Google Scholar] [CrossRef]
- Ng, K.; Xue, H.; Wang, J. Experimental and numerical study on a miniature Joule–Thomson cooler for steady-state characteristics. Int. J. Heat Mass Transf. 2002, 45, 609–618. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, L.; Liang, L.; Liu, X.; Li, J. Thermodynamic optimization of the recuperative heat exchanger for Joule–Thomson cryocoolers using response surface methodology. Int. J. Refrig. 2015, 60, 155–165. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Q.-S.; Liu, Y.-W.; Gao, B. Optimal design of a novel non-isometric helically coiled recuperator for Joule–Thomson cryocoolers. Appl. Therm. Eng. 2020, 167, 114763. [Google Scholar] [CrossRef]
- Hong, Y.-J.; Park, S.-J.; Kim, H.-B.; Choi, Y.-D. The cool-down characteristics of a miniature Joule–Thomson refrigerator. Cryogenics 2006, 46, 391–395. [Google Scholar] [CrossRef]
- Ardhapurkar, P.; Atrey, M. Performance optimization of a miniature Joule–Thomson cryocooler using numerical model. Cryogenics 2014, 63, 94–101. [Google Scholar] [CrossRef]
- Chua, H.T.; Wang, X.; Teo, H.Y. A numerical study of the Hampson-type miniature Joule–Thomson cryocooler. Int. J. Heat Mass Transf. 2006, 49, 582–593. [Google Scholar] [CrossRef]
- Damle, R.; Atrey, M. Transient simulation of a miniature Joule–Thomson (J–T) cryocooler with and without the distributed J–T effect. Cryogenics 2015, 65, 49–58. [Google Scholar] [CrossRef]
- Hoxton, L.G. The Joule-Thompson effect for air at moderate temperatures and pressures. Phys. Rev. 1919, 13, 438. [Google Scholar] [CrossRef]
- Roebuck, J. The Joule-Thomson effect in air. Proc. Am. Acad. Arts Sci. 1925, 60, 537–596. [Google Scholar] [CrossRef]
- Roebuck, J. The Joule-Thomson effect in air. Second paper. Proc. Am. Acad. Arts Sci. 1930, 64, 287–334. [Google Scholar] [CrossRef]
- Roebuck, J.; Osterberg, H. The Joule-Thomson effect in nitrogen. Phys. Rev. 1935, 48, 450. [Google Scholar] [CrossRef]
- King, R.; Potter, J. An Axial-Flow Porous Plug Apparatus1. ASME Pap. 1962, 61, 1–226. [Google Scholar]
- Pocock, G.; Wormald, C.J. Isothermal Joule–Thomson coefficient of nitrogen. J. Chem. Soc. Faraday Trans. 1 1975, 71, 705–725. [Google Scholar] [CrossRef]
- Zelmanov, J. Joule-Thomson effect in helium at low temperatures. J. Phys. USS FI 1940, 3, 43. [Google Scholar]
- Roebuck, J.; Osterberg, H. The Joule-Thomson effect in argon. Phys. Rev. 1934, 46, 785. [Google Scholar] [CrossRef]
- Johnston, H.L.; Bezman, I.I.; Hood, C.B. Joule-Thomson Effects in Hydrogen at Liquid Air and at Room Temperatures1. J. Am. Chem. Soc. 1946, 68, 2367–2373. [Google Scholar] [CrossRef]
- Gladun, A. The Joule-Thomson effect in neon. Cryogenics 1966, 6, 31–33. [Google Scholar] [CrossRef]
- Koeppe, W. On the Joule−Thomson Effect of Gases and Mixtures. Kaltetechnik 1959, 11, 363–369. [Google Scholar]
- Hartmann, H.; Mann, R.; Neumann, A. Ein Beitrag zum Joule–Thomson–Effekt von Stickstoff-Wasserstoff-Gemischen. Ber. Bunsenges. Phys. Chem. 1969, 73, 492–497. [Google Scholar]
- Sreedhar, R.; Sreedhar, A. Joule–Thomson cooling with binary mixtures. Infrared Phys. Technol. 1998, 39, 451–455. [Google Scholar] [CrossRef]
- Roebuck, J.; Osterberg, H. The Joule-Thomson Effect in Mixtures of Helium and Argon. J. Chem. Phys. 1940, 8, 627–635. [Google Scholar] [CrossRef]
- Little, W. Microminiature refrigeration. AIP Conf. Proc. 2008, 985, 597–605. [Google Scholar]
- Little, W.A. Fast Cooldown Miniature Refrigerators. U.S. Patent No. 4,489,570, 25 December 1984. [Google Scholar]
- Shapiro, A.; Fraiman, L.; Parahovnik, A. Ceramic 3D printed Joule Thomson mini cryocooler intended for HOT IR detectors. In Tri-Technology Device Refrigeration (TTDR) II; SPIE: Bellingham, WA, USA, 2017; Volume 10180, pp. 48–60. [Google Scholar]
- Sadaghiani, A.K.; Koşar, A. Numerical and experimental investigation on the effects of diameter and length on high mass flux subcooled flow boiling in horizontal microtubes. Int. J. Heat Mass Transf. 2016, 92, 824–837. [Google Scholar] [CrossRef]
- Aboubakri, A.; Akkus, Y.; Sadaghiani, A.K.; Sefiane, K.; Koşar, A. Computational and experimental investigations on the evaporation of single and multiple elongated droplets. Chem. Eng. J. Adv. 2022, 10, 100255. [Google Scholar] [CrossRef]
- Xie, Z.; Wang, X.; Zhu, W. Theoretical and experimental exploration into the fluid structure coupling dynamic behaviors towards water-lubricated bearing with axial asymmetric grooves. Mech. Syst. Signal Process. 2022, 168, 108624. [Google Scholar] [CrossRef]
- Lin, Q.; Wei, Z.; Wang, N.; Chen, W. Analysis on the lubrication performances of journal bearing system using computational fluid dynamics and fluid–structure interaction considering thermal influence and cavitation. Tribol. Int. 2013, 64, 8–15. [Google Scholar] [CrossRef]
- Liang, Y.; Yang, Y.; Shan, X.; Wang, Z. Effect of Airfoil Dimple on Low-Reynolds-Number Differing Laminar Separation Behavior via Multi-Objective Optimization. J. Aircr. 2022, 9, 1–14. [Google Scholar] [CrossRef]
- Dong, C.; Cui, X.; Liu, S.; Jiang, Z.; Wu, Y. Investigation on the choked mass-flow characteristics of the helium fluid during the Joule-Thomson process in micro-orifice under different high pressures. Cryogenics 2022, 122, 103416. [Google Scholar] [CrossRef]
- Baki, M.; Okutucu-Özyurt, T.; Sert, C. Optimization of Joule-Thomson cryocooler heat exchanger using one-dimensional numerical modeling. Cryogenics 2019, 104, 102981. [Google Scholar] [CrossRef]
- Lemmon, E.W.; Huber, M.L.; McLinden, M.O. NIST reference fluid thermodynamic and transport properties–REFPROP. NIST Stand. Ref. Database 2002, 23, v7. [Google Scholar]
- Poling, B.E.; Prausnitz, J.M.; O’Connell, J.P. The Properties of Gases and Liquids; Mcgraw-Hill: New York, NY, USA, 2001; Volume 5. [Google Scholar]
- Fluent, A. Ansys Fluent Theory Guide; ANSYS Inc., USA: Canonsburg, PA, USA, 2011. [Google Scholar]
- Menter, F.R. Turbulence Modeling for Engineering Flows; Technical Paper; ANSYS Inc., USA: Cannonsburg, PA, USA, 2011; pp. 1–25. [Google Scholar]
- Menter, F.; Kuntz, M.; Langtry, R. Ten years of industrial experience with the SST turbulence model. Turbul. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Canada, CA, USA, 1998; Volume 2. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Uncertainties |
|---|---|
| Orifice diameter | ±10 µm |
| Conical needle diameter | ±10 µm |
| Resistance resolution | ±0.5% |
| Resistance accuracy | ±5–10% |
| Force measurement accuracy | ±8–12% |
| Pressure drop | ±1–3% |
| Micromanipulator motion resolution | ±1 µm |
| Model | Expression |
|---|---|
| Spalart–Allmaras | |
| k–ε standard | |
| RNG k–ε | |
| Realizable k–ε | |
| Standard k–ω | |
| SST k–ω |
| Number of Grids | F (N) |
|---|---|
| 6 × 103 | 22.9 |
| 2.5 × 104 | 23.4 |
| 1 × 105 | 23.9 |
| 2.3 × 105 | 24.7 |
| 6.8 × 105 | 24.6 |
| 2.4 × 106 | 24.6 |
| Operating Parameters | |
|---|---|
| Inlet pressures | 10 bar, 20 bar, 30 bar, 40 bar, 50 bar |
| Nozzle\needle distance (clearances) | 100 µm, 200 µm, 300 µm, 400 µm, 500 µm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aboubakri, A.; Sadaghiani, A.K.; Akgonul, S.; Erdoğmuş, A.B.; Baki, M.; Can, F.; Sabanovic, A.; Koşar, A. Numerical and Experimental Investigation of the Effect of Micro Restriction Geometry on Gas Flows through a Micro Orifice. Fluids 2022, 7, 151. https://doi.org/10.3390/fluids7050151
Aboubakri A, Sadaghiani AK, Akgonul S, Erdoğmuş AB, Baki M, Can F, Sabanovic A, Koşar A. Numerical and Experimental Investigation of the Effect of Micro Restriction Geometry on Gas Flows through a Micro Orifice. Fluids. 2022; 7(5):151. https://doi.org/10.3390/fluids7050151
Chicago/Turabian StyleAboubakri, Akam, Abdolali Khalili Sadaghiani, Sarp Akgonul, Abdullah Berkan Erdoğmuş, Murat Baki, Fatih Can, Asif Sabanovic, and Ali Koşar. 2022. "Numerical and Experimental Investigation of the Effect of Micro Restriction Geometry on Gas Flows through a Micro Orifice" Fluids 7, no. 5: 151. https://doi.org/10.3390/fluids7050151
APA StyleAboubakri, A., Sadaghiani, A. K., Akgonul, S., Erdoğmuş, A. B., Baki, M., Can, F., Sabanovic, A., & Koşar, A. (2022). Numerical and Experimental Investigation of the Effect of Micro Restriction Geometry on Gas Flows through a Micro Orifice. Fluids, 7(5), 151. https://doi.org/10.3390/fluids7050151